除障机器人毕业设计
智能避障机器人设计与研究(硬件)毕业设计论文

(3)遥控移动机器人。
(4)环境与机器人集成。像人需要道路、交通信号灯等一样,机器人为了在一个动态变化的环境中行动,也同样需要基础设施。
(5)生态机器人学(生物机器人学)。
(6)多机器人系统。主要是获取机器人团队协调和控制技术,并将其应用于战略重要情况。
关键词:智能避障机器人,红外传感器,单片机,L298N,PWM调速
THEDESIGN AND STUDY OF INTELLIGENT OBSTACLE AVOIDANCE ROBOT(HARDWARE)
ABSTRACT
In scientific exploration and emergency rescue often encounter some danger or human can not directly reach the area of detection,these will need to use the robot to complete. Therobot'sautomaticobstacleavoidancemovementin complex terrainis an essential and most basic function. Therefore,the automatic obstacle avoidance system development is made. Automatic obstacle avoidancerobotdevelopment based on thissystemis made of. With the development of technology for the unknown space and mankind can not be directly accessible to gradually become a hot area of exploration,which makes the automatic obstacle avoidance robot has great significance. Automatic obstacle avoidance robotcan serve as a regional exploration and emergency rescue robot system that allows robots to automatically avoid obstacles in the road.
盲人自动避障装置毕业设计 精品

摘要针对盲人行走过程中无法了解到前方是否存在障碍物的问题,本文设计了一种新型的基于单片机控制的盲人自动避障装置,且该装置带有语音提醒功能。
本方案通过超声波的发送和接收来检测前方一段距离内是否有障碍物存在,若有,则语音提醒模块发出提醒信息。
语音电路根据障碍物距离发出不同频率的报警声音,以提醒使用者。
此时使用者可按下按键,报警响声中断。
报警声响起时,电路板上的LED灯会亮起,以提醒路人让路。
本文所采用的主要芯片有超声波测距模块US-100,语音芯片ISD4004,音频功放TDA2822。
本装置的设计所采用的主要方法是:采用两个超声波模块进行测距,其中一个模块的超声波探头垂直向下,另一个模块的超声波探头斜向下。
二者夹角为60°。
由于超声波模块US-100的测距范围是:2㎝-450㎝。
因而采用这样的方式进行测距,水平测距范围是0.6㎝-389㎝。
采用这样的方法进行测距与只采用一个超声波模块平行进行测距相比较的优点是:(1)当前方的有坑时,也能检测出来并及时报警(2)能检测到高于地面的所有障碍物。
语音芯片ISD4004可存储8分钟的录音时间,本芯片录了四段录音:当离障碍物389㎝-200㎝时播放第一段录音,当离障碍物200㎝-100㎝时播放第二段录音,当离障碍物100㎝-0㎝时播放第三段录音,当前方有坑或沟时播放第四段录音。
通过多次实物验证,能实现预期目标。
本文是在基于单片机控制的超声波测距原理的基础上,配以其他的外围电路来实现避障功能的。
此装置简单实用且便携,设计在很大程度上解决了盲人行走中的安全问题。
关键字:单片机AT89S52;超声波测距US-100;语音提醒ISD4004;音频功放TDA2822AbstractIn view of the problem that the blind can’t understand whether there are obstacles in front during walking, a new obstacle-avoidance automatic device was designed, which is based on single-chip. In addition, it has the function of voice-reminding. The scheme is by means of ultrasonic’s sending and receiving to detect a distance ahead whether there exist within the obstacles. If any, voice reminder module is a reminder. Voice reminder module sends the frequency of alarm sound according to the different obstacle distance, to remind the user. At this time the user can press the set key, alarm sound interruption. When alarm sound up, the circuit boards will light up LED to warn the stranger for its way.This paper provides the chips have ultrasonic ranging module US-100, ISD4004 voice chip, TDA2822 audio power amplifier.The design of this device with main method is: the two ultrasonic module sequence, one of the modules of ultrasonic probe vertically down, the other a module of ultrasonic probe inclined down. Both an Angle of 60 °. Because of the ultrasonic module US-100 range is: 2㎝-450 ㎝. So it is this way sequence, level range is 0.6 ㎝range-389 ㎝. Using such methods and only use a range of ultrasonic module parallel sequence advantage is: the current party there pits, also can test out and even the police. ISD4004 voice chip can be stored 8 minutes recording time, the chip to record four recording: when the obstacles 389 ㎝-200 ㎝played the first recording, when the obstacles 200 ㎝-100 ㎝played the second recording, when the obstacles 100 ㎝-0 ㎝played the third recording, the current party a pit or groove fourth recording played.This paper is based on single chip microcomputer control on the basis of the principle of ultrasonic ranging, match with other peripheral circuit to achieve obstacle avoidance of the function. This device is simple and applicable portable, in the very great degree the blind man walk to solve the security issue.Keywords:Monolithic integrated circuit AT89S52; Ultrasonic ranging US-100; V oice remind ISD4004; TDA2822 audio power amplifier目录摘要 (I)Abstract (II)1 前言 (1)1.1设计的目的和意义 (1)1.2 盲人避障技术的研究现状 (2)2 设计所用的主要技术 (3)2.1 硬件技术 (3)2.2 软件技术 (3)3 系统设计 (5)3.1 总体框架 (5)3.2 各个模块的工作流程 (5)3.3 系统的软件流程图 (5)3.4 系统各个模块的设计 (6)3.4.1 超声波测距模块 (6)3.4.2 语音模块设计 (11)3.4.3 音频功放模块 (16)3.4.4 单片机最小系统及其简单应用 (19)4 测试部分 (24)4.1 实验方法 (24)4.1.1 超声波测距的方法 (24)4.1.2语音芯片的使用方法 (26)4.1.3 TDA2822的使用方法 (27)4.2 实验对象 (28)4.2.1超声波测距模块 (28)4.2.2 语音电路的使用情况 (28)4.3 软件设计思想 (28)5 实验结果分析与展望 (30)5.1实验结果分析 (30)5.2实验结果展望 (30)参考文献 (32)致谢 (33)附录A (34)附录B (41)1 前言1.1设计的目的和意义在我们日常生活中,盲人的生活有诸多不便,其中一个就是盲人在行走过程无法了解到前方是否有障碍物存在,难免出现撞到障碍物的情况。
避障机器人设计报告

避障设计报告避障设计报告1.引言在现代社会中,技术的发展已经在很多领域展现了巨大的潜力。
其中,避障是一类具有重要潜力和应用需求的系统。
本设计报告旨在详细介绍避障的设计原理、系统架构和关键组件。
2.需求分析在避障的设计之前,我们首先需要明确设计的具体需求和目标。
需求分析阶段包括对于功能、性能、环境、使用场景等方面进行细致的研究和分析。
2.1 功能需求避障需要具备以下基本功能:- 实时感知环境中的障碍物并进行识别;- 计算并实现合适的避障策略;- 进行精确的定位和导航;- 具备良好的稳定性和鲁棒性。
2.2 性能需求在不同使用场景中需要满足一定的性能指标,如:- 实时性:需要对遇到的障碍物做出快速响应;- 精确性:的定位和导航算法需要具备较高的准确性;- 稳定性:的控制系统需要具备良好的稳定性,以适应不同的工作环境。
2.3 环境需求在不同的环境中运行,对于环境的特征和条件也有一定的要求。
例如,室内环境和室外环境所需要的传感器和算法可能会有差异。
2.4 使用场景应用的不同场景可能会对的设计产生影响。
例如,家庭环境下的自动清扫可能需要经过家具和障碍物之间狭窄通道的穿越。
3.系统架构设计基于需求分析的结果,我们可以设计出避障的系统架构。
系统架构包括硬件和软件两个方面。
3.1 硬件架构避障的硬件架构通常包括以下组件:- 传感器模块:用于感知环境中的障碍物,常见的传感器包括超声波传感器、红外线传感器和摄像头等。
- 控制系统:负责处理传感器数据,计算避障策略,并控制的运动。
- 电源模块:提供所需的电源能量,通常包括电池和电源管理电路等。
- 机械结构:的机械结构用于支持传感器模块和控制系统,并提供运动和导航功能。
3.2 软件架构避障的软件架构包括以下部分:- 感知模块:负责处理传感器数据,对环境中的障碍物进行识别和定位。
- 规划模块:根据感知模块的数据和的运动能力,计算出合适的避障策略。
- 控制模块:根据规划模块的输出,控制的运动并实施避障策略。
避障机器人设计报告

避障机器人设计报告一、引言随着科技的不断发展,机器人在各个领域的应用越来越广泛。
其中,避障机器人作为一种能够自主感知环境并避开障碍物的智能设备,具有重要的实用价值。
本报告将详细介绍避障机器人的设计过程,包括硬件设计、软件算法、传感器选择以及实验结果等方面。
二、需求分析在设计避障机器人之前,我们首先需要明确其应用场景和功能需求。
避障机器人主要应用于物流搬运、智能家居、工业生产等领域,需要能够在复杂的环境中自主移动,并避开各种静态和动态的障碍物。
根据上述需求,我们确定了避障机器人的主要性能指标:1、能够检测到距离机器人一定范围内的障碍物,并准确测量其距离和方向。
2、能够根据障碍物的信息,实时规划出合理的运动路径,避免碰撞。
3、具有较高的移动速度和灵活性,能够适应不同的地形和工作环境。
4、具备一定的续航能力,能够持续工作一段时间。
三、硬件设计1、车体结构避障机器人的车体结构采用四轮驱动的方式,以提高其稳定性和机动性。
车身采用铝合金材料制作,既轻便又坚固。
车轮采用橡胶材质,具有良好的抓地力和减震性能。
2、驱动系统驱动系统由电机、驱动器和控制器组成。
电机选用直流无刷电机,具有高效率、低噪音和长寿命的特点。
驱动器采用脉宽调制(PWM)技术,实现对电机转速和转向的精确控制。
控制器采用单片机,负责接收传感器数据、处理算法和发送控制指令。
3、传感器系统为了实现避障功能,我们选用了多种传感器,包括超声波传感器、红外传感器和激光雷达传感器。
超声波传感器:用于检测远距离的障碍物,测量精度较高,但容易受到环境干扰。
红外传感器:用于检测近距离的障碍物,响应速度快,但测量范围较小。
激光雷达传感器:能够提供高精度的三维环境信息,但成本较高。
通过合理配置和融合这些传感器的数据,可以实现对机器人周围环境的全面感知。
4、电源系统电源系统采用锂电池组,为机器人提供稳定的电力供应。
同时,配备了电源管理模块,对电池的充电和放电进行监控和保护,延长电池的使用寿命。
工业机器人毕业设计
工业机器人毕业设计工业机器人毕业设计一、设计背景近年来,随着工业自动化的深入发展,工业机器人已经成为现代工厂不可或缺的设备。
工业机器人可以代替人工完成繁重、危险或重复性高的工作,提高生产效率,降低劳动强度,提升产品质量。
因此,设计一款具有较高智能化水平的工业机器人成为了一个紧迫的需求。
二、设计目标本设计旨在设计一款具有较高智能化水平的工业机器人,具体目标如下:1. 根据任务需求,机器人能够进行自主学习和智能决策。
2. 机器人具有较高的定位精度和抓取能力。
3. 机器人具有较高的自适应能力,能够适应不同的工作环境和工作任务。
4. 机器人具有良好的安全性能,能够及时发现并避免潜在的危险。
三、设计方案本设计采用基于深度学习的视觉识别技术,结合激光雷达传感器实时获取周围环境信息。
同时,使用高精度的位置估计算法,来实现机器人的定位和移动。
设计采用多关节机械臂,配备智能夹具,具备强大的抓取能力。
机器人通过与工厂的监控系统联动,能够自主学习和改进,提高工作效率。
此外,机器人还配备了多种传感器,如红外线传感器和声纳传感器等,以提高机器人在复杂环境下的自适应能力。
四、设计优势相比传统的工业机器人,本设计具有以下优势:1. 使用深度学习技术和激光雷达传感器,提高了机器人的感知和识别能力。
2. 采用高精度的位置估计算法,提高了机器人的定位精度和移动能力。
3. 多关节机械臂和智能夹具的设计,增强了机器人的抓取能力。
4. 运用多种传感器,提升了机器人在复杂环境下的自适应能力。
五、设计预期效果通过本设计,预期可以实现以下效果:1. 提高生产效率,降低劳动强度,减少生产成本。
2. 提升产品质量,减少人为误差,避免质量问题。
3. 减少人工干预,避免工人操作差错带来的安全事故,提高工作场所的安全性。
4. 适应不同的工作环境和工作任务,具备更高的灵活性和适应性。
六、总结本设计旨在设计一款具有较高智能化水平的工业机器人,通过采用深度学习技术、激光雷达传感器和高精度的位置估计算法,实现机器人的自主学习、智能决策、定位和移动。
红外避障机器人毕业设计

摘要随着红外物理与技术的不断发展, 红外探测技术已广泛地应用于军事、煤矿的安全生产等各个领域。
把目标或目标区域的红外辐射聚焦在探测器上红外接收光学系统的基本作用, 通常情况下其结构类似于普通的接收光学系统, 但由于工作波段为红外波段, 其光学材料和镀膜必须和它的工作波长相匹配。
针对题目的要求,我们设计了一款简易的红外避障小车。
电路设计主要有以下四个模块:传感器模块(红外发射和接收器),控制模块(AT89S52),执行模块(伺服电机),电源模块。
传感器模块主要通过对左、右红外传感器的信号分别进行采集,传送给控制模块。
控制模块对采集来的信号进行处理,做出比较后把控制信号传送给执行模块。
配合正确的软件设计,小车能够在设计的赛道中准确快速地完成行走任务。
关键词:红外;避障;传感器AbstractAll bodies has its own infrared radiation characteristics. For studying the various objects of infrared radiation, people use ideal ─absolute blackbody radiation body (hereinafter referred to as in bold) the benchmark. Can absorb all the incident radiation and not the reflection of the object is called in bold. Good absorber must have also been good radiation body, so the blackbody radiation efficiency is highest, the radiation rate than a 1. Any real objects of radiation emission quantity and the same temperature blackbody emission of quantity of launch than, called the object than radiation rate, its value is always less than 1. The object than radiation rate, and the material object types, characteristics, temperature, surface other factors, such as the wavelength.According to the topic request, we design a simple infrared obstacle avoidance of the car. The circuit design basically has the following four modules: sensor module (infrared transmitter and receiver), control module (AT89S52 devices), executive module (servo motor), power supply module. Sensor module mainly through to the left and right of the infrared sensor signal,respectively the collection, transfer to the control module. Control module to the acquisition of signal processing, make more the control after signals to execute module. The software design includes basic car to walk, walk, the combination of infrared obstacle avoidance program design, such as walking strategy improvement, through to the infrared signal processing to achieve the best car walk path.Cooperate with the right software design, the car can in the design of the track accurately and rapidly finish walking task.Keywords: infrared; Obstacle avoidance; sensor目录第一章绪论 (1)1.1红外线研究背景 (1)第二章红外避障机器人的设计方案 (3)2.1主要设计任务 (3)2.2任务分析与方案设计 (3)2.2.1 任务分析 (3)2.2.2 方案设计 (3)第三章硬件电路设计 (5)3.1红外传感器电路设计 (5)3.1.1红外发射二极管的选择 (5)3.1.2红外接收器的选择 (7)3.2控制电路设计 (10)3.3人机接口单元 (11)3.3.1 LCD1602显示 (11)3.3.2串口电路设计 (12)3.4执行电路设计 (13)3.4.1 伺服电机 (13)3.4.2 伺服电机的信号控制 (14)3.5电源电路设计 (14)3.6赛道设计 (15)第四章软件设计 (16)4.1机器人基本行走命令 (16)4.1.1基本巡航动作 (16)4.1.2匀加速/减速运动 (17)4.2红外探测 (19)4.2.1测试红外发射探测器 (19)4.2.2红外发射程序 (20)4.3关于行走赛道的硬件调试与改进 (22)第五章结束语 (23)5.1结论和展望 (23)致谢 (24)第一章绪论1.1 红外线研究背景在科学探索和紧急抢险中经常会遇到对与一些危险或人类不能直接到达的地域的探测,这些就需要用机器人来完成。
杨家波 毕业设计论文《机器人避障模型》
2010届学生毕业论文(设计)贵州商业高等专科学校毕业论文设计机器人避障模型系别: 计科系专业: 信息管理班级: 10-1姓名: 杨家波学号: 10601101009指导教师: 袁华说明本系统正是针对人力资源部门的人员信息管理,通过对员工基本信息﹑人事管理等的系统界面设计,将会给管理者带来极大的方便,具有手工管理无法比拟的优点,例如检索速度快、查找方便、可靠性高、存储量大、使用时间长等。
用计算机管理取代传统的手工操作,大大减少了管理人员的工作量,提高了工作效率,为获取详细的人力资源信息提供了保证,方便各类人员的查询和信息保证,增强了管理工作的时效和人员主动性。
人力资源管理系统主要包括:系统登录、系统管理、信息设置、人事管理、工资管理等模块。
在本系统中侧重实现人力资源的基本信息管理。
目录摘要 (4)一、问题重述 (5)二、问题分析 (5)三、模型假设 (6)四、符号说明 (6)五、模型建立与求解 (6)六、模型检验 (25)七、模型评价 (26)八、模型推广 (26)参考文献 (27)附录 (28)机器人避障模型摘要本文针对机器人避障问题进行分析与研究,在800×800的平面场景摆放有12个不同形状的障碍物,以O(0,0)点为起点,对A、B、C、O为目标点,通过分析,我们假设在圆弧的半径为10个单位,且下建立模型,由出发点到达目标点可以有很多条路径行走,所以就有不同的几种方案可以到达目标点,据题意;我们把机器人行走的路径都看成是由直线和拐角圆弧线组成的,根据这个原理,我们对机器人可行走的路径分析直线与拐角圆弧的关系,将所有路径都转化为若干个线圆结构来进行求解,对于途中经过的拐角圆弧,我们都将只考虑半径最小的情况,然后建立解析几何图形模型对可行走的不同路径进行求解,从而得到最短路径。
对于问题一:我们根据几何图形模型很容易求解出可能行走的路径,然后列出二种明显的方案进行比较,得到最终的求出最短路径:O →A 最短路径为:471.2219O →B 最短路径为:607.5783O →C 最短路径为:1090.942O→A→B→C→O最短路径为:2843.1693对于问题二,我们采用Dijkstra算法(见附录三),解出最短时间路径为:462.4194。
毕业设计-机器人避障问题

机器人避障问题摘要本文通过在给定的平面场景范围内对机器人就如何躲避12个不同形状障碍物区域的避障行走问题进行探究,在出发点到目的点的多种情形中进行选择,并根据要求,保证所走的路线为直线段和圆弧。
继而探究避障的最短路径及最短时间路径的数学模型,在此探究过程中,运用穷举法,进行各种行走路线的CAD绘图,利用平面几何的点、线、圆的关系求解行走路径所经过点的坐标、线段长度、和弧长,在各总长度中进行比较,找出最短路径。
最终,根据机器人速度的数据,建立最短时间路径的数学模型,运用LINGO软件最终求出最短时间的路径。
针对问题一,根据题意,为了不与障碍物发生碰撞,同时要求机器人行走线路与障碍物间的最近距离为10个单位,可分别以障碍物的边界处绘制以10为半径的圆,从而确定安全的可行走的活动范围。
利用平面几何知识,在给定的障碍物的坐标的基础上,求解各路径下的直线段和圆弧的长度并加总求和,利用平面几何的知识,假设未知切点坐标和圆心,以及根据固定点的坐标,建立模型,求解路线的距离。
进而,比较同一目的地不同路径的总长度,最终,求得最短路径,结果如下所示:O→A:471.03; O→B:853.77; O→C:1055.063;O→A→B→C→O:2701.932对于求解O→A→B→C→O路径时,将路径划分为若干个切线圆结构来求解,建立目标函数,并利用目标函数建立优化方程组,运用LINGO软件,求解确定过A,B,C 点圆弧不同圆心的坐标针对问题二,由于转弯速度的不同,在问题一的基础上求解出转弯半径的取值范围,建立以转弯半径为变量的最短时间路径模型,并通过LINGO软件求解,并通过CAD软件做出求解路径的具体图形。
关键词:避障最短路径穷举法CAD LINGO 平面几何优化模型目录摘要 (1)1 问题重述 (1)2 问题分析 (2)3 模型假设 (2)4 符号说明 (2)5 模型的建立与求解 (3)5.1 问题一的模型 (3)5.1.1 模型建立 (3)模型I (3)5.1.2 模型求解 (7)5.2 问题二的模型 (14)5.2.1 模型建立 (14)模型II (16)5.2.2 模型求解 (16)6 模型的评价与改进 (117)7 参考文献 (17)1 问题重述在一个800*800的平面场景图中,如图,在已知的12个不同形状障碍物的坐标区域,机器人从以原点(0,0)出发前往不同的目标点,并且不能与障碍物发生碰撞。
红外避障机器人毕业设计
红外避障机器人毕业设计As a person, we must have independent thoughts and personality.摘要随着红外物理与技术的不断发展, 红外探测技术已广泛地应用于军事、煤矿的安全生产等各个领域。
把目标或目标区域的红外辐射聚焦在探测器上红外接收光学系统的基本作用, 通常情况下其结构类似于普通的接收光学系统, 但由于工作波段为红外波段, 其光学材料和镀膜必须和它的工作波长相匹配。
针对题目的要求,我们设计了一款简易的红外避障小车。
电路设计主要有以下四个模块:传感器模块(红外发射和接收器),控制模块(AT89S52),执行模块(伺服电机),电源模块。
传感器模块主要通过对左、右红外传感器的信号分别进行采集,传送给控制模块。
控制模块对采集来的信号进行处理,做出比较后把控制信号传送给执行模块。
配合正确的软件设计,小车能够在设计的赛道中准确快速地完成行走任务。
关键词:红外;避障;传感器AbstractAll bodies has its own infrared radiation characteristics. For studying the various objects of infrared radiation, people useideal─absolute blackbody radiation body (hereinafter referred to as in bold) the benchmark. Can absorb all the incident radiation and not the reflection of the object is called in bold. Good absorber must have also been good radiation body, so the blackbody radiation efficiency is highest, the radiation rate than a 1. Any real objects of radiation emission quantity and the same temperature blackbody emission of quantity of launch than, called the object than radiation rate, its value is always less than 1. The object than radiation rate, and the material object types, characteristics, temperature, surface other factors, such as the wavelength.According to the topic request, we design a simple infrared obstacle avoidance of the car. The circuit design basically has the following four modules: sensor module (infrared transmitter and receiver), control module (AT89S52 devices), executive module (servo motor), power supply module. Sensor module mainly through tothe left and right of the infrared sensor signal, respectively the collection, transfer to the control module. Control module to the acquisition of signal processing, make more the control after signals to execute module. The software design includes basic car to walk, walk, the combination of infrared obstacle avoidance program design, such as walking strategy improvement, through to the infrared signal processing to achieve the best car walk path.Cooperate with the right software design, the car can in the design of the track accurately and rapidly finish walking task.Keywords: infrared; Obstacle avoidance; sensor目录第一章绪论.................................. 错误!未定义书签。
煤矿救灾机器人毕业设计论文[管理资料]
![煤矿救灾机器人毕业设计论文[管理资料]](https://img.taocdn.com/s3/m/dab4583c76a20029bc642d26.png)
摘要煤矿救援机器人是一种能够在煤矿井下灾害环境遥控或自主导航工作的机器人,能代替煤矿的搜救队员深入井下,抢救矿难后被困矿工,并以这种方式减少甚至避免救护队员的伤亡。
同时在煤矿爆炸事故后的探测救援过程中,救护人员在井下高温环境下负重作业,其体力以及氧气消耗都很大。
救援机器人主要作用是代替救护人员搬运、转移伤员和遇难者至安全区域,而且救援机器人需要携带必要的救护设备和仪器,因此救援机器人应该具有足够大的尺寸和动力以及良好的续航能力。
首先,本文在满足上述要求的基础上,设计了煤矿救援机器人行走机构的机械部分。
在综合比较后选择轮式的行走机构。
同时考虑到救援机器人的特殊工作环境,通过链传动实现了各轮的同步移动,克服了轮式移动机构跨沟能力差及易打滑等缺点。
参照PACKBOT机器人增加摆臂,机器人伸出摆臂有利于越障。
其次,详细设计了煤矿救灾机器人控制系统的硬件电路,包括数据采集单元电路、运动控制单元电路、编码器解析单元电路等。
关键字:轮式;同步移动;摆臂;数据采集;运动控制ABSTRACTCoal mine rescue robot is one kind of robots used in underground destroyed coal mine. It can rescue trapped miners in the underground instead of mine rescue team after mine disaster. It will avoid casualties of mine rescue team in this way. At the same time after the explosion and the rescue process of detection in the coal mine, mine rescue team in underground load operation under high temperature environment, and their physical as well as consumption of oxygen is huge. A major role in the coal mine rescue robot is to replace the mine rescue team to transport, and transfer the wounded and the victims to a safe area. Rescue robots had to carry the necessary equipment and apparatus, so the rescue robot should have sufficient size and power and good endurance capacity.First of all, on the basis of these requirements, I designed the mechanical parts of the coal rescue robot. In comparison, I choose the wheel body. At the same time, I take the special working environment for the coal mine rescue robot into account, so I try to achieve all-round mobile synchronization through the chain drive. And it can overcome the shortcomings of Wheeled Mobile institutions such as the cross-channel capabilities and easy to spin. In refer to PACKBOT robot, I design the arm for the robot, so it can across the barriers more easily.Secondly, hardware circuit of robot control system is designed in detail, such as data acquisition unit circuit, motion control unit circuit; encoder analyzing unit circuit and so on.Keyword:Wheeled;Sync mobile;Arm;Data Acquisition;Motion Control毕业论文(设计)诚信声明本人声明:所呈交的毕业论文(设计)是在导师指导下进行的研究工作及取得的研究成果,论文中引用他人的文献、数据、图表、资料均已作明确标注,论文中的结论和成果为本人独立完成,真实可靠,不包含他人成果及已获得或其他教育机构的学位或证书使用过的材料。
机器人导航与避障技术研究毕业设计
机器人导航与避障技术研究毕业设计机器人导航与避障技术研究一、引言机器人技术的发展与应用已经渗透到了各个领域,导航与避障是其中的关键技术之一。
本篇文章将对机器人导航与避障技术进行研究,探讨其在毕业设计中的应用。
二、机器人导航技术研究机器人导航是指机器人在未知或复杂环境中自主决策、规划路径并实现移动的能力。
导航技术可分为基于地标的导航和基于地图的导航两种形式。
1. 基于地标的导航基于地标的导航是通过识别环境中的特定地标来确定机器人的位置和方向。
这种方法相对简单,但对于特定环境有一定的限制。
它常用于室内环境中,通过识别墙壁、标志物或传感器布置的参考点来确定机器人的位置。
2. 基于地图的导航基于地图的导航是通过构建环境地图并利用该地图进行导航。
机器人通过激光雷达等传感器获取环境信息,并通过算法对信息进行处理和分析,生成环境地图。
机器人基于地图进行路径规划和移动,从而实现导航。
三、机器人避障技术研究机器人避障是指机器人在移动过程中避开障碍物并安全到达目标位置的能力。
避障技术是导航中的重要环节,保证机器人在复杂环境中的安全与稳定。
1. 视觉传感避障视觉传感避障是基于摄像头等传感器获取环境图像信息,通过图像处理和分析技术来检测和识别障碍物,并通过算法计算出避障路径。
视觉传感避障具有实时性强、适应性好的特点。
2. 激光雷达避障激光雷达避障是利用激光扫描仪等传感器获取环境的三维信息,通过对障碍物进行距离和形状分析,实现避障路径计算。
激光雷达避障技术具有高精度、可靠性高的特点,适用于室内和室外环境。
四、机器人导航与避障技术的应用机器人导航与避障技术在各个领域都有广泛的应用。
1. 无人驾驶领域随着自动驾驶技术的发展,机器人导航与避障技术成为实现无人驾驶的重要基础。
通过导航与避障技术,无人驾驶车辆能够根据路况和交通规则自主决策并安全行驶。
2. 物流领域机器人导航与避障技术在物流领域得到广泛应用。
机器人可以通过导航技术快速准确地找到货物的存放位置,并通过避障技术避开障碍物,实现自动化物流运输。
避障机器人毕设开题报告

避障机器人毕设开题报告1. 引言本文档为避障机器人毕设开题报告,旨在介绍避障机器人毕设的研究背景、目标和计划,并阐述预期的研究方法和成果。
避障机器人是近年来人工智能和机器人技术的研究热点之一,具有广泛的应用潜力。
本毕设旨在设计和实现一个基于深度学习的避障机器人系统,为智能机器人在复杂环境中自主导航和避障提供解决方案。
2. 研究背景随着人工智能和机器人技术的不断发展,智能机器人在日常生活和工业生产中的应用越来越广泛。
然而,智能机器人在复杂环境中的自主导航和避障仍然是一个挑战。
传统的机器人导航方法往往基于预定路径规划,缺乏对环境变化的实时感知和自适应能力。
因此,设计一个能够实时感知环境并做出智能决策的避障机器人系统具有重要意义。
3. 研究目标本毕设的主要目标是设计和实现一个基于深度学习的避障机器人系统。
具体而言,我们的研究目标包括:•构建一个避障机器人平台,并集成传感器和控制硬件。
•开发一个基于深度学习的视觉感知系统,实时获取环境图像。
•提出一种基于深度学习的避障算法,实现机器人的智能导航和避障能力。
•对系统进行实验验证,评估其性能和可靠性。
4. 研究计划本毕设的研究计划分为以下几个阶段:4.1 避障机器人平台构建首先,我们将选取合适的硬件平台作为避障机器人的基础,包括车身、轮子、电机、传感器等。
在搭建硬件平台的基础上,我们将进行控制系统的搭建和测试,确保机器人可以进行基本的运动控制。
4.2 视觉感知系统开发在硬件平台搭建完成后,我们将开发一个基于深度学习的视觉感知系统,用于实时获取环境图像。
这个系统将包括图像采集、图像预处理和特征提取等模块,旨在提供高质量的感知数据给避障算法。
4.3 基于深度学习的避障算法设计本阶段的重点是设计一种基于深度学习的避障算法,借助视觉感知系统获取的环境图像,实现机器人的智能导航和避障能力。
我们将选取合适的深度学习模型,并进行训练和调优,使其能够准确地识别和避开障碍物。
除障机器人毕业设计

3.4.2 红外光电传感器简介...............................14
4组装除障机器人全过程.........................................15
工业机器人按臂部旳运动形式分为四种。直角坐标型旳臂部可沿三个直角坐 标移动;圆柱坐标型旳臂部可作升降、回转和伸缩动作;球坐标型旳臂部能回转、 俯仰和伸缩;关节型旳臂部有多种转动关节。
工业机器人按执行机构运动旳控制机能,又可分点位型和持续轨迹型。点位 型只控制执行机构由一点到另一点旳精确定位,合用于机床上下料、点焊和一般搬运、装卸等作业;持续轨迹型可控制执行机构按给定轨迹运动,合用于持续焊 接和涂装等作业。
5.3 软件实现...............................................24
5.3.1 使用函数与模块简介 ..............................24
5.3.2 除障机器人动作分解 ..............................25
5.3.3 NorthSTAR 软件编程实现 ..........................27
6除障机器人完毕与测试 ........................................28
6.1 除障机器人设计实体 ....................................28
2 除障机器人总设计 .............................................7
2.1 除障机器人设计规定 .....................................7
【精品】基于单片机自动壁障机器人的研究_毕业论文设计

编号淮安信息职业技术学院毕业论文学生姓名许路路学号系部电气工程系专业机电一体化班级429111指导教师龚希宾顾问教师揭志远摘要随着微电子技术的不断发展,微处理器芯片的集成程度越来越高,单片机已可以在一块芯片上同时集成CPU、存储器、定时器/计数器、并行和串行接口、看门狗、前置放大器、A/D转换器、D/A转换器等多种电路,这就很容易将计算机技术与测量控制技术结合,组成智能化测量控制系统。
这种技术促使机器人技术也有了突飞猛进的发展,目前人们已经完全可以设计并制造出具有某些特殊功能的简易智能机器人。
关键字: 单片机,传感器,转换器,机器人.AbstractA bstract: with the development of microelectronic technology, microprocessor chip integration degree more and more high, SCM has in one chip and integrated CPU, memory, timer / counter, parallel and serial interface, watchdog, preamplifier, A / D converter, D / A converter and other circuits, it is easy to the combination of computer technology and measurement and control technology, intelligent measurement and control system. This technology to robot technology has make a spurt of progress of development, at present has been entirely simple intelligent robot is designed and manufactured with certain special functions.Keywords: Microcontroller, sensor, transducer, robot目录摘要 (I)目录 (IV)第一章绪论 (1)1.1 机器人的定义 (1)1.2 国内外移动机器人研究现状及发展趋势 (1)1.3 课题研究的意义 (2)1.4 本设计任务和主要内容 (2)第二章系统主要硬件电路设计 (3)2.1 系统原理组成框图 (3)2.2系统主控模块电路 (3)2.2.1 STC89C52单片机性能优点 (3)2.2.2主控模块电路 (4)2.3 电机控制 (5)2.4电源及稳压模块 (5)2.4.1方案1:采用交流电经直流稳压处理后供电 (5)2.4.2方案2:采用干电池组进行供电 (6)2.4.3方案3:采用可充电蓄电池供电 (6)2.5传感器模块 (7)2.6逻辑模块 (8)2.7感测模块 (9)2.1.1 方案1:使用超声波探测器 (9)2.1.2 方案2:使用光电对管探测 (9)2.7.3方案3:使用视频采集处理装置进行探测 (9)2.7.4 方案4:使用光电开关进行障碍物信息采集 (9)2.8连接模块 (10)2.9电机驱动模块 (11)2.9.1方案1:使用分立原件搭建电机驱动电路 (11)2.9.2方案2:使用L298N芯片驱动电机 (12)2.10显示模块: (12)2.10.1方案1:采用数码管显示 (12)2.10.2 方案2:采用液晶显示 (13)第三章系统软件设计 (14)3.1程序设计流程图 (14)3.2系统主程序设计 (15)3.4 PWM信号控制机器人走向流程图 (16)3.5 PWM信号控制电机流程序 (17)3.5 液晶128×64初始化及各显示子程序 (18)第四章结束语 (21)第一章绪论1.1 机器人的定义机器人技术是综合了计算机、控制论、机构学、信息和传感技术、人工智能、仿生学等多学科而形成的高新技术,集合了多学科的发展。
慧鱼避障机器人毕业设计

山东交通学院2013届毕业生毕业论文(设计)题目:钢轨打磨机设计(砂轮式)院(系)别机械工程学院专业机械设计制造及其自动化届别2009届学号090610422姓名李达指导教师刘泽深完成日期:年月日原创声明本人李达郑重声明:所呈交的论文“钢轨打磨机设计(砂轮式)”,是本人在导师×××的指导下开展研究工作所取得的成果。
除文中特别加以标注和致谢的地方外,论文中不包含任何其他个人或集体已经发表或撰写过的研究成果,对本文的研究做出重要贡献的个人和集体均已在文中以明确方式标明,本人完全意识到本声明的法律后果,尊重知识产权,并愿为此承担一切法律责任。
论文作者(签字):李达日期:年月日摘要摘要正文:钢轨是轨道交通的主要部件,钢轨与列车的车轮直接接触,其质量的好坏直接影响到行车的安全性和平稳性。
由于机车车辆的碾压,冲击作用,各部经常产生飞边,导致各部几何尺寸变化,影响行车安全。
为了使钢轨各部位在运用中保持标准的几何尺寸,必须消除产生的飞边等缺陷。
而手砂轮打磨会造成不平顺、不连续等缺陷。
本文以钢轨打磨机为研究对象,分析钢轨打磨机构的的结构原理、运行工况。
通过计算选取钢轨打磨机的主要零部件,从而进行钢轨打磨机结构设计。
本机结构新颖、机体轻巧、操作简便、维修方便、磨削效率高、质量好。
完全能够满足我国各种钢轨和道岔各部位打磨的要求。
关键词:钢轨,打磨,零件选取,结构设计AbstractText:Rail is the main component of rail transportation, rail direct contact with the wheels of the train, its quality directly affects the safety and stability of running. Locomotive rolling, as a result of impact, the department often causes flash, leading to the geometric size change, affecting the traffic safety. In order to geometry size so that each part of rail to maintain standards in use, must eliminate the burr defect. While the hand grinding can cause irregular, discontinuous defects.Taking the rail grinding machine as the research object, structure principle, the analysis of operating condition of rail grinding mechanism. The main parts of rail grinding machine is selected through the calculation, thus grinding machine structure design of rail.The structure is novel, structure compact, simple operation, convenient repair, high grinding efficiency, good quality. Fully able to meet the different parts of our country various rails and switch grinding requirements.Key words:Rail, grinding, parts selection, structure design目录前言 (1)1 磨削加工技术 (2)1.1 加工机理 (2)1.2 发展现状和应用 (2)2 钢轨打磨机发展现状与趋势 (3)3 钢轨打磨机(砂轮式)的工作原理 (4)4 钢轨打磨机(砂轮式)的结构设计 (4)4.1 砂轮选择 (4)4.1.1 磨料的选择 (5)4.1.2 粒度的选择 (5)4.1.3 硬度的选择 (5)4.1.4 结合剂的选择 (5)4.2 汽油机选择 (6)4.3 皮带选择 (7)4.3.1 确定计算功率Pca (7)4.3.2 选择V带的带型 (7)4.3.3 确定带轮的基准直径d d并验算带速V (7)4.3.4 确定中心距a,并选择V带的基准长度Ld (8)4.3.5 验算小带轮上的包角a1 (8)4.3.6 确定带的根数z (8)4.3.7 计算单根V带的初拉力的最小值(F0)min (8)4.3.8 计算压轴力Fp (9)4.4轴的选择 (9)4.4.1 输出轴上的功率P1 (9)4.4.2 作用在轴上的力 (9)4.4.3 初步确定轴的最小直径 (9)4.4.4 弯扭合成应力校核轴的强度 (9)4.5 轴承选择 (10)4.5.1 求比值Fa1/Fr1 (11)4.5.2 初步计算当量动载荷P (11)4.5.3 求轴承应有的基本额定动载荷值 (11)4.5.4 轴承选择 (11)4.6 打磨头部分配件图 (12)4.7 进给装置选择 (12)4.7.1 升降装置选择 (12)4.7.2 摆动装置选择 (14)4.8 机架与行走装置 (14)5 钢轨打磨机结构图 (15)6 使用方法 (15)7 安全操作规程 (16)8 保养维修 (16)结论………………………………………………………………………………………………致谢………………………………………………………………………………………………参考文献…………………………………………………………………………………………附录A……………………………………………………………………………………………前言钢轨是轨道交通的主要部件,钢轨与列车的车轮直接接触,其质量的好坏直接影响到行车的安全性和平稳性。
高速过障超高压巡线除冰机器人设计
XX大学毕业设计(论文)超高压巡线除冰机器人所在学院专业班级姓名学号指导老师年月日诚信承诺我谨在此承诺:本人所写的毕业设计(论文)《超高压巡线除冰机器人》均系本人独立完成,没有抄袭行为,凡涉及其他作者的观点和材料,均作了注释,若有不实,后果由本人承担。
承诺人(签名):年月日摘要Abstract目录摘要 (III)Abstract (III)目录 ...................................................................................................................................... I V 第1章绪论 (1)1.1 课题研究意义 (1)1.2 除冰机器人研究现状 (1)1.3除冰设备发展趋势 (3)1.4 课题要求 (4)第2章超高压巡线除冰机器人总体方案设计 (6)2.1 工作原理 (6)2.2驱动方式选择 (6)2.3 传动方式选择 (7)2.4 行走方式选择 (7)2.5 除冰方式选择 (7)第3章绕线压紧传动机构设计 (9)3.1绕线电机的选择 (9)3.2 蜗杆传动设计计算 (9)3.2.1 选择蜗杆、蜗轮材料 (9)3.2.2 确定蜗杆头数Z1及蜗轮齿数Z2 (10)3.2.3 确定蜗杆蜗轮中心距a (10)3.2.4 蜗杆传动几何参数设计 (11)3.2.5 环面蜗轮蜗杆校核计算 (14)3.3 轴的设计 (15)3.3.1 轴的材料选择 (15)3.3.2 轴的结构设计 (16)3.3.3 轴承校核 (18)第4章机器人行走跨越障碍机构设计 (20)第5章其它机构设计 (24)4.1铣刀机构 (24)蜗轮蜗杆部的电机计算 (26)第6章数控硬件电路设计 (29)6.1硬件电路设计 (29)6.1.1 数控系统的硬件结构 (29)6.1.2 数控系统硬件电路的功能 (30)6.2关于各线路元件之间线路连接 (30)6.3关于电路原理图的一些说明 (31)总结与展望 (34)参考文献 (35)第1章绪论1.1 课题研究意义输电线路覆冰会经常造成线路跳闸、断线、倒杆、通信中断等线路事故,严重影响了电网系统的安全运行,对国家经济造成了巨大损失。
机械设计制造及自动化毕业论文-便携式绞盘机牵引越障工艺及装置设计

AbstThe portable robot has good performance, can be up and down the stairs, step in the indoor environment, in outdoor unstructured terrain can climb over obstacles, crossing the ditch, adaptive road. By loading different equipment and instruments, the robot can be widely used for rescue, rescue, explosion protection, scientific research, military and other fields, its application value is huge
分类号
密级
宁
毕业设计(论文)
便携式绞盘机牵引越障工艺及装置设计
所在学院
机械与电气工程学院
专业
机械设计制造及其自动化
班级
11机自x班
姓名
学号
指导Байду номын сангаас师
2015年3月31日
摘
便携式越障机器人具有良好的运动性能,在室内环境中可以上下楼梯,跨越台阶,在室外非结构地形中可以翻越障碍、跨越壕沟、自适应路面。通过加载不同的设备和仪器,机器人可广泛用于救援、抢险、防爆、科考、军事等领域,其应用价值十分巨大
第
2.1
车轮采用杠杆原理,由于齿轮的啮合点始终位于远离轴线的地方,在遇到障碍物后,车轮静止,动力源驱动齿轮转动,而此时的动力臂大于阻力臂,比普通车轮有更大的力矩,同时后轮给以驱动力,车轮将会容易攀升,越障成功。
灾害救援机器人设计方案
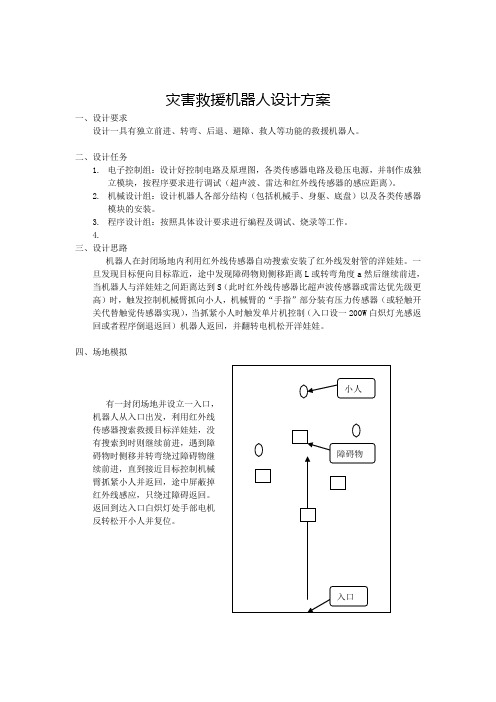
灾害救援机器人设计方案一、设计要求设计一具有独立前进、转弯、后退、避障、救人等功能的救援机器人。
二、设计任务1.电子控制组:设计好控制电路及原理图,各类传感器电路及稳压电源,并制作成独立模块,按程序要求进行调试(超声波、雷达和红外线传感器的感应距离)。
2.机械设计组:设计机器人各部分结构(包括机械手、身躯、底盘)以及各类传感器模块的安装。
3.程序设计组:按照具体设计要求进行编程及调试、烧录等工作。
4.三、设计思路机器人在封闭场地内利用红外线传感器自动搜索安装了红外线发射管的洋娃娃。
一旦发现目标便向目标靠近,途中发现障碍物则侧移距离L或转弯角度a然后继续前进,当机器人与洋娃娃之间距离达到S(此时红外线传感器比超声波传感器或雷达优先级更高)时,触发控制机械臂抓向小人,机械臂的“手指”部分装有压力传感器(或轻触开关代替触觉传感器实现),当抓紧小人时触发单片机控制(入口设一200W白炽灯光感返回或者程序倒退返回)机器人返回,并翻转电机松开洋娃娃。
四、场地模拟有一封闭场地并设立一入口,机器人从入口出发,利用红外线传感器搜索救援目标洋娃娃,没有搜索到时则继续前进,遇到障碍物时侧移并转弯绕过障碍物继续前进,直到接近目标控制机械臂抓紧小人并返回,途中屏蔽掉红外线感应,只绕过障碍返回。
返回到达入口白炽灯处手部电机反转松开小人并复位。
五、机器人运作流程图:六、电路模块设计1.超声波发射电路:2.超声波接收电路:3.红外线发射电路:4.红外线接受电路5.直流电机的驱动电路6. 5V与12V直流电源电路7.压力或触觉传感器8. 步进电机驱动电路(1):步进电机驱动电路(2)七、红外线搜索方案原理场地内洋娃娃身上的红外线发射头发射的红外线被机器人身上一个接收头接受到,如果这个接收头不是正前方的接收头(蓝色框表示),假设它被右方的接收头接收到,则触发单片机控制底盘步进电机右转(2个相对步进电机同向同速转动带动2个车轮一正转一反转,可实现机器人原地转向),直到正前方的接收头接收到红外线后就触发单片机控制机器人向目标前进。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
摘要当代科学技术发展特点之一就是机械技术,电子技术和信息技术的结合,机器人就是这种结合的产物之一。
现代工业生产中能代替人做某些单调、频繁和重复的长时间作业,或是危险、恶劣环境下的作业,例如在冲压、压力铸造、热处理、焊接、涂装、塑料制品成形、机械加工和简单装配等工序上,以及在原子能工业等部门中,完成对人体有害物料的搬运或工艺操作。
机器人在我们生活中起着越来越重要的作用。
此次设计除障机器人在一条规定路线上通过光电传感器作为检测反馈原件完成除障前的检测工作,通过 CDS5516 舵机的使用与博创模块套件的结合,拼装能灵活运动的执行机构,使用图形化编程软件完成机器人的夹取与放置动作程序的编写,完成除障机器人的制作。
这台机器人将由出发点到达目标点(障碍物所在区域),机器人通过控制器底板所固定的红外光电传感器寻找到障碍物恰当的位置。
并在适当的位置停下来,通过控制器板上固定的机械手臂将障碍物牢牢夹住,并将障碍物放在机器人小车的车身板子上。
这时机器人将回到初始状态,继续沿直线前行,寻找下一障碍物。
以此类推。
实现障碍物的检测与清除的功能,它将代替人工进行障碍物的清除工作,由于机器人的运用这将大大减少人力的运用,且工作效率得到了大大的提高。
关键词:除障机器人图形化编程 MultiFLEX2控制器目录摘要 (1)目录 (2)1 课题设计背景和目的 (4)1.1 设计背景 (4)1.2 设计目的 (5)2 除障机器人总设计 (7)2.1 除障机器人设计要求 (7)2.2 除障机器人总体设计思路 (7)3 硬件系统的组成 (9)3.1 博创模块化机器人套件 (9)3.2 控制部分 (9)3.2.1 控制器选用要求 (9)3.2.2 MultiFLEX2 控制器简介 (9)3.2.3 控制器底盘选用要求 (10)3.3 执行机构 (11)3.3.1 机器人舵机选用要求 (11)3.3.2 CDS5516 舵机简介 (11)3.3.3 夹取机构 (12)3.3.4 舵机连接件 (13)3.3.5 其他连接件 (13)3.4 检测部分 (13)3.4.1 传感器选用要求 (14)3.4.2 红外光电传感器简介 (14)4 组装除障机器人全过程 (15)4.1 组装除障机器人全过程 (15)5 软件系统设计 (23)5.1 软件总设计 (23)5.2 编程语言和软件的选用 (23)5.2.1 编程语言选择 (23)5.2.2 NorthSTAR 软件介绍 (23)5.3 软件实现 (24)5.3.1 使用函数与模块简介 (24)5.3.2 除障机器人动作分解 (25)5.3.3 NorthSTAR 软件编程实现 (27)6 除障机器人完成与测试 (28)6.1 除障机器人设计实体 (28)6.2 除障机器人功能测试 (28)结束语 (31)致谢 (32)参考文献 (33)1 课题设计背景和目的1.1 设计背景二十一世纪的今天,随着智能化发展越来越快人们迫切寻找一种能代替人工作的机器。
这种机器能按照人所规定的思路去执行。
我国近几年机器人自动化生产线已经不断出现,并给用户带来显著效益。
随着我国工业企业自动化水平的不断提高,机器人自动化线的市场也会越来越大,并且逐渐成为自动化生产线的主要方式。
我国机器人自动化生产线装备的市场刚刚起步,而国内装备制造业正处于由传统装备向先进制造装备转型的时期,这就给机器人自动化生产线研究开发者带来巨大商机。
据预测,目前我国仅汽车行业、电子和家电行业、烟草行业、新能源电池行业等,年需求此类自动化线就达300多条,产值约为60多亿元人民币。
预计在2005年左右需求此类自动化生产线达到600条。
据初步测算,“十一五”期间汽车制造业的需求市场容量将达到800多亿元人民币。
经过四十多年的发展,工业机器人已在越来越多的领域得到了应用。
在制造业中,尤其是在汽车产业中,工业机器人得到了广泛的应用。
如在毛坯制造(冲压、压铸、锻造等)、机械加工、焊接、热处理、表面涂覆、上下料、装配、检测及仓库堆垛等作业中,机器人都已逐步取代了人工作业。
随着工业机器人向更深更广方向的发展以及机器人智能化水平的提高,机器人的应用范周还在不断地扩大,已从汽车制造业推广到其他制造业,进而推广到诸如采矿机器人、建筑业机器人以及水电系统维护维修机器人等各种非制造行业。
此外,在国防军事、医疗卫生、生活服务等领域机器人的应用也越来越多,如无人侦察机(飞行器)、警备机器人、医疗机器人、家政服务机器人等均有应用实例。
机器人正在为提高人类的生活质量发挥着重要的作用目前,国际制造业中心正向中国转移,用信息化带动工业化、用高新技术改造传统产业已成为江苏省工业发展的必由之路。
作为先进制造装备之典型代表的机器人必将有一个大的产业发展空间,市场前景广阔。
工业机器人技术特点:1、技术先进工业机器人集精密化、柔性化、智能化、软件应用开发等先进制造技术于一体,通过对过程实施检测、控制、优化、调度、管理和决策,实现增加产量、提高质量、降低成本、减少资源消耗和环境污染,是工业自动化水平的最高体现。
2、技术升级工业机器人与自动化成套装备具备精细制造、精细加工以及柔性生产等技术特点,是继动力机械、计算机之后,出现的全面延伸人的体力和智力的新一代生产工具,是实现生产数字化、自动化、网络化以及智能化的重要手段。
3、应用领域广泛工业机器人与自动化成套装备是生产过程的关键设备,可用于制造、安装、检测、物流等生产环节,并广泛应用于汽车整车及汽车零部件、工程机械、轨道交通、低压电器、电力、IC 装备、军工、烟草、金融、医药、冶金及印刷出版等众多行业,应用领域非常广泛。
4、技术综合性强工业机器人与自动化成套技术,集中并融合了多项学科,涉及多项技术领域,包括工业机器人控制技术、机器人动力学及仿真、机器人构建有限元分析、激光加工技术、模块化程序设计、智能测量、建模加工一体化、工厂自动化以及精细物流等先进制造技术,技术综合性强。
工业机器人由主体、驱动系统和控制系统三个基本部分组成。
主体即机座和执行机构,包括臂部、腕部和手部,有的机器人还有行走机构。
大多数工业机器人有 3~6 个运动自由度,其中腕部通常有 1~3 个运动自由度;驱动系统包括动力装置和传动机构,用以使执行机构产生相应的动作;控制系统是按照输入的程序对驱动系统和执行机构发出指令信号,并进行控制工业机器人按臂部的运动形式分为四种。
直角坐标型的臂部可沿三个直角坐标移动;圆柱坐标型的臂部可作升降、回转和伸缩动作;球坐标型的臂部能回转、俯仰和伸缩;关节型的臂部有多个转动关节。
工业机器人按执行机构运动的控制机能,又可分点位型和连续轨迹型。
点位型只控制执行机构由一点到另一点的准确定位,适用于机床上下料、点焊和一般搬运、装卸等作业;连续轨迹型可控制执行机构按给定轨迹运动,适用于连续焊接和涂装等作业。
工业机器人按程序输入方式区分有编程输入型和示教输入型两类。
编程输入型是将计算机上已编好的作业程序文件,通过 RS232 串口或者以太网等通信方式传送到机器人控制柜。
具有触觉、力觉或简单的视觉的工业机器人,能在较为复杂的环境下工作;如具有识别功能或更进一步增加自适应、自学习功能,即成为智能型工业机器人。
它能按照人给的“宏指令”自选或自编程序去适应环境,并自动完成更为复杂的工作。
将此引进自动化的生产设备,让直接地人工操作转为间接地控制机器,工业机器人成为生产中至关重要的一部分被广泛运用于现代生产中。
1.2 设计目的作为机器人家族中重要一员的工业机器人在工业生产中能代替人做某些单调、频繁和重复的长时间作业,或是危险、恶劣环境下的作业,例如在冲压、压力铸造、热处理、焊接、涂装、塑料制品成形、机械加工和简单装配等工序上,以及在原子能工业等部门中,完成对人体有害物料的搬运或工艺操作。
正常的生产中一些工厂的重复乏味劳动对一线工人的心理会造成一定影响,车间里的有毒有害物质则直接影响到了工作人员的身体健康,高温高强度的恶劣工作环境甚至能给操作人员带来生命危险,为此工业机器人的发明和使用显得尤为重要。
它将在实际生活中取代人手,使人在工作中得到解放,有充分的自由区服务其他。
本次课题设计除障机器人将由出发点到达目标点(障碍物所在区域),机器人通过控制器底板所固定的红外光电传感器寻找到障碍物恰当的位置,并在适当的位置停下来。
通过控制器板上固定的机械手臂将障碍物牢牢夹住,并将障碍物放在机器人小车的车身板子上。
这时机器人将回到初始状态,继续沿直线前行,寻找下一障碍物。
以此类推。
机器人排障能适应任何恶劣的环境。
在军事和工业生产中起到检查并排除障碍的作用,这将大大减少人力的运用。
节约了成本,也提高了工作效率。
2除障机器人总设计2.1除障机器人的设计要求本次设计的除障机器人要求在任何恶劣环境中,机器人能独立直线行走,运用红外光电传感器作为障碍物检测装置。
机器人直行过程中,如遇到障碍物。
机器人将在障碍物前适当的位置停止下来。
其机身上的机械手将弯曲下来。
到达障碍物所在位置将障碍物牢牢夹住(舵机使用舵机模式),并将障碍物举起反方向平稳的放在机器人小车的车身板子上。
这时机器人将回到初始状态,如机器人检测范围内无其他障碍物。
机器人将继续沿直线前行,寻找下一个障碍物。
以此类推。
本次完成除障机器人硬件与软件的设计,且让硬件与软件良好的结合起来使得除障机器人能够顺利地完成障碍物的清除工作。
2.2除障机器人总体设计思路除障机器人需要行走。
因此本人运用四个舵机加上轮子安装在控制器地板上。
组成行走机构。
由于本人实际的除障机器人目的是出去直线工作范围内的障碍物。
因此只需要一个红外光电传感器。
考虑到障碍物的高低,所以必须将传感器安装在比较接近地面的位置。
所以本人打算将他安装在控制器底板上。
除障机器人需要一个可以帮助它抓取障碍物的手臂。
本人用3个舵机(舵机使用舵机模式),使用一些接件组成可弯曲的手臂。
将手臂安装在控制板边沿位置。
MultiFLEX2控制器紧挨着手臂横向安装在控制板上。
然后用连接线将所有舵机与MultiFLEX2控制器相连。
最后在控制器底板上方安装一块同样的控制器底板(用于盛放障碍物)这样完成了硬件的安装。
机器人需要在直行过程中,如遇到障碍物。
机器人将在障碍物前适当的位置停止下来。
其机身上的机械手将弯曲下来。
到达障碍物所在位置将障碍物牢牢夹住,并将障碍物举起反方向平稳的放在机器人小车的车身板子上。
这时机器人将回到初始状态,如机器人检测范围内无其他障碍物。
机器人将继续沿直线前行,寻找下一个障碍物。
根据设计思路做以下除障机器人设计流程图如下(图2.1):图2.1 设计流程图3 硬件系统的组成3.1 博创模块化机器人套件本次采用的是来自于博创兴盛公司出售的创意之星套件。