轮式驱动电动汽车驱动系统仿真
轮毂电机驱动电动汽车各轮毂电机扭矩分配算法的仿真和评价

第l 9卷 第 1 期
21 0 0年 3月
计 算 机 辅 助 工 程
Co u e de g n e n mp t rAi d En i e r g i
V 1 1 . o . 9 No 1
MBt A.201 " 0
文 章编 号 :06—0 7 ห้องสมุดไป่ตู้ 0 0 0 —0 70 10 8 1 2 1 ) 10 2 -5
a o tm, S 进 行数值 仿 真 , 这 3种 算 法从计 算速度 、 l rh WL ) gi 对 迭代 次数 和计 算精 度等 方 面进 行 对 比分 析 与评 价 , 结果表 明 wL s综合性 能 最优 . 关键词 : 毂 电机 驱动 电动 汽车 ;电机 扭矩 分配 ; 轮 再分 配伪逆 算 法 ; 叠广 义逆 法 ; 权最 小二 乘 层 加
c lu a in a c rc f h h e g r h r o a e n v u t d h e uts o h t L a ac l t c u a y o e tr e a o t msa e c mp r d a d e a ae .T e r s l h wst a S h s o t l i l W
纯电动汽车驱动系统设计及性能仿真

一 一
衄∞ 一 一
P 。一
^
.
( 2)
第三 , 电动汽 车应具备 持续爬 坡 能力 , 据最 大爬坡 度确定 电机 额定输 出功 率 根
( gf ̄ mgi a r + ) , () 3
其 中 i 电动 汽 车爬坡 速 度 , 为 单位 为 k h 要使 电动 汽 车能 正常 行 驶 , m/ . 电机 额定 功 率 P 必 须 同时 满 足 以上 3 条件 , 个 又考 虑到机 械传递 效率 刁 则 ,
电池组 容量 选择 主要考 虑 电动 汽车行 驶 时的 最大 功 率 和行 驶 一定 距离 所 消耗 的能 量. 在选 定 蓄 电池 型号 的条件 下 , 电池组 容量 取决于 蓄 电池 数 目. 此 , 因 根据 电动汽 车 所需 最 大功 率 和续 驶 里程 确 定 蓄 电池
数 目 r / .
其 中 : V C , 分别 为每块 蓄 电池 的容量 和 电压 ; 为单 位 路 程 ( m) 消耗 能 量 , 位 为 k ; 为 续驶 里 W k 所 单 W L 程 , 位为 k 单 m. 根 据 () () 7 ,8 式所列 条件 得到 7 , 则 电动汽 车需 要蓄 电池 数 目即为 n T X , ) " n, / z ≥Ia { z. I
作者简介: 树健(98 )男 . 高 1 8 一 , 山东 临 沂 人 , 安 大 学 硕 士 研究 生 , 要 从 事 汽 车 新 能 源 研究 ; 丁 跃 ( 90一 , , 长 主 陈 16 )男 安 徽 安 庆 人 , 安 大 学 教 授 , 士 生 导 师 , 要从 事新 能 源 车辆 、 制 技 术 和 太 阳 能 汽 车 等 研 究 . 长 硕 主 控
车动力 性 能和续 驶里程 .
电动汽车动力系统设计及仿真研究

电动汽车动力系统设计及仿真研究一、本文概述随着全球能源危机和环境问题的日益严重,电动汽车作为一种清洁、高效的交通方式,正受到越来越多的关注和追捧。
电动汽车动力系统是电动汽车的核心组成部分,其性能直接决定了电动汽车的动力性、经济性和环保性。
因此,对电动汽车动力系统的设计及仿真研究具有非常重要的意义。
本文旨在探讨电动汽车动力系统的设计原则、关键技术及仿真方法,并通过案例分析,为电动汽车动力系统的优化设计提供理论支持和实践指导。
我们将介绍电动汽车动力系统的基本组成和工作原理,分析当前电动汽车动力系统的发展趋势和挑战。
我们将详细讨论电动汽车动力系统的关键技术,包括电池技术、电机技术、控制技术等,并分析这些技术如何影响动力系统的性能。
我们将介绍电动汽车动力系统的仿真方法,包括建模、仿真和优化等步骤,并通过实例展示仿真技术在电动汽车动力系统设计和优化中的应用。
本文期望能够为电动汽车动力系统的设计者和研究者提供有价值的参考信息,推动电动汽车动力系统的技术进步和应用发展,为实现可持续交通和绿色发展做出贡献。
二、电动汽车动力系统基础知识电动汽车动力系统作为电动汽车的核心组件,决定了车辆的性能表现和行驶效率。
了解和掌握电动汽车动力系统的基础知识,对于研究和设计高性能的电动汽车至关重要。
电动汽车动力系统主要由电池组、电机、控制器和传动系统等部分组成。
电池组作为动力源,为电机提供直流电能。
电机则将电能转化为机械能,驱动车辆行驶。
控制器则负责调节电机的运行状态,以满足车辆加速、减速和制动等需求。
传动系统则负责将电机的动力传递到车轮上,使车辆得以行驶。
在电动汽车动力系统中,电池组的性能直接影响到车辆的续航里程和充电时间。
目前常见的电池类型包括锂离子电池、镍氢电池和燃料电池等。
其中,锂离子电池因其高能量密度、长寿命和较低的自放电率等优点,被广泛应用于电动汽车中。
电机作为电动汽车的驱动核心,其性能对车辆的动力性、经济性和舒适性等方面都有重要影响。
211098601_某纯电动汽车动力系统能量仿真分析
第35卷第2期2023年4月沈阳大学学报(自然科学版)J o u r n a l o f S h e n y a n g U n i v e r s i t y(N a t u r a l S c i e n c e)V o l.35,N o.2A p r.2023文章编号:2095-5456(2023)02-0151-06某纯电动汽车动力系统能量仿真分析王楷焱1,王云1,戚基艳2(1.沈阳理工大学汽车与交通学院,辽宁沈阳110159;2.沈阳工学院机械工程与自动化学院,辽宁沈阳113122)摘要:基于某仿真软件搭建了纯电动汽车的动力传动模型,并设置了重要部件的参数,研究了N E D C 工况下部分影响因素对输入转速㊁电池S O C的影响结果㊂通过模型可以直观有效地看出动力传动系统能量传递情况,为综合能量流仿真分析发现的问题进一步提出可供参考的优化建议㊂研究结果显示,建立的动力传动系统能量流仿真模型可靠有效;常温N E D C循环工况下的动力工况表现较好㊂关键词:能量流;仿真;动力传动系统;纯电动汽车;N E D C循环工况中图分类号:U469.7文献标志码:AE n e r g y S i m u l a t i o n A n a l y s i so faP u r eE l e c t r i cV e h i c l eP o w e r S y s t e mWA N G K a i y a n1,WA N GY u n1,Q I J i y a n2(1.S c h o o lo f A u t o m o b i l e s&T r a n s p o r t a t i o n,S h e n y a n g L i g o n g U n i v e r s i t y,S h e n y a n g110159,C h i n a;2.S c h o o l o fM e c h a n i c a l E n g i n e e r i n g a n dA u t o m a t i o n,S h e n y a n g I n s t i t u t eo fT e c h n o l o g y,S h e n y a n g113122,C h i n a)A b s t r a c t:B a s e do nas i m u l a t i o ns o f t w a r e,t h e p o w e rt r a n s m i s s i o n m o d e lo f p u r ee l e c t r i c v e h i c l e s w a sc o n s t r u c t e d,a n dt h e p a r a m e t e r s o fi m p o r t a n tc o m p o n e n t s w e r es e t.T h e i n f l u e n c e o f s o m e f a c t o r so n i n p u t s p e e da n db a t t e r y S O Cu n d e rN E DC w o r k i n g c o n d i t i o n s w a s s t u d i e d.T h r o u g h t h em o d e l,t h e e n e r g y t r a n s f e r o f t h e d r i v e t r a i n c a nb e i n t u i t i v e l y a n de f f e c t i v e l y s e e n,a n df u r t h e ro p t i m i z a t i o ns u g g e s t i o n sc a nb e p u t f o r w a r df o r t h e p r o b l e m sf o u n d i n t h e c o m p r e h e n s i v e e n e rg y f l o ws i m u l a t i o n a n a l y s i s.Th e r e s e a r c h r e s u l t s s h o wt h a t t h ee s t a b li s h e d p o w e rt r a n s m i s s i o ns y s t e m e n e r g y f l o w s i m u l a t i o n m o d e l i sr e l i a b l ea n d e f f e c t i v e.T h e p o w e r c o n d i t i o nu n d e r t h e n o r m a l t e m p e r a t u r eN E D Cc y c l e c o n d i t i o n i s g o o d. K e y w o r d s:e n e r g y f l o w;s i m u l a t i o n;p o w e rt r a n s m i s s i o ns y s t e m;p u r ee l e c t r i cv e h i c l e; N E D Cc y c l i c c o n d i t i o n s近年来,电动车凭借着其清洁㊁无污染的特点应用越来越广㊂但是一些问题随之而来,最主要的问题就是行驶里程不够远㊂除了大力发展电池技术以外还可以通过提高能量利用率来提高行驶里程㊂目前针对电动车动力系统运行效率的研究大部分是单个零部件的优化[1],但是电动车在行驶过程中,其动力电池㊁电动机控制器和驱动电动机(也称三电)具有很强的耦合关系,如果只是单一地研究某个零部件就很难达到对动力总成全局优化的效果[2]㊂所以,分析能量在整个动力总成内部的传递以及转化的规律即能量流尤为重要㊂针对电动汽车能量流的研究,现在大多是通过进行系统台架试验,或者是通过软件仿真的方法进行,整车试验应用不广㊂国内外一些学者基于试验对电动汽车能量流进行了很多的研究,但没有单独地针对电动车传动系统能量流来研究㊂收稿日期:20220628基金项目:辽宁省科学技术计划项目(2021-M S-354)㊂作者简介:王楷焱(1983),男,辽宁沈阳人,副教授,博士㊂251沈阳大学学报(自然科学版)第35卷本文在建立了某电动车电机动力传动系统数学模型的基础上,测得了不同工况下由驱动电机转轴与车轮之间的连接部分的有效功率和损耗等,分析了各种工况下电池S O C的使用和回收情况㊂1传动系统能量流仿真模拟1.1能量流原理纯电动汽车的能量由电池提供,储存在电池中的电力通常来自电网㊂有关于纯电动汽车能量消耗常用的计算方法可分为2种:一是将电网输入的交流电量作为能耗的计算依据;二是以动力电池输出的高压直流电量作为能量消耗的计算基础㊂绝大多数纯电动汽车的能量流实验中,都对电网中的电能变化进行监测,考虑充电机㊁充电效率等影响因素来开展能量流的计算分析㊂本文中对能量流的计算依托于基于软件搭建的整车能量流仿真模型,是以动力电池输出的高压直流电为计算基础的,动力电池的总输出能量包括电池满电的能量和制动时回收的部分能量[3]㊂当车辆刹车时,能量通过其他制动装置从车轮转移到电池㊂汽车运行时,电池首先将储存的电能传送到电机控制器上,电机控制器根据汽车的需要控制电机,驱动电机将电能转换为机械能,然后通过其他装置传输给车轮,车轮克服阻力带动车辆行驶㊂对于具有制动能量回收功能的纯电动汽车,在制动时,部分能量通过车轮传递到驱动电机上,电机将机械能转化为电能,并将其传输到电池中进行储能㊂在这种情况下电机发挥发电机的作用㊂此外,为了保持低压系统的正常运行,电池管理系统会根据是否缺少12V低压电池,通过D C/D C转换器对部分电池进行充电,并通过电池为低压系统供电[4]㊂从蓄电池充电到驱动车轮运行,纯电动汽车的能量走向可以概括为:充电桩 车载充电机 蓄电池 电流 电力调节器 电动机 动力传动系统 驱动汽车行驶㊂在这整个能量传递过程中,主要存在着电能和机械能的转换及消耗㊂图1为纯电动汽车能量流动情况,其中动力电池㊁电机等部件构成电动车的传动系统,它是一个复杂的多非线性因素耦合系统[5]㊂本文利用软件搭建电动车传动系统,研究了不同工况下动力传动系统的能量损耗,为后续研究提供了参考㊂图1纯电动汽车能量流F i g.1E n e r g y f l o wo f p u r ee l e c t r i cv e h i c l e s1.2动力传动系统模型介绍及参数设置纯电动车的动力传动系统模型主要包含驾驶员模型㊁动力电池模型㊁电机模型㊁车辆模型㊁整车控制模型等[6]㊂动力传动系统模型的参数输入主要根据实车参数和试验结果,以便于后续研究的参考㊂1)驾驶员模型㊂在软件中的I F PD r i v e模型库中,根据建模需求和特点,选择驾驶员模型中的D R V D R V A01B子模型,其内部自带P I D控制器㊂驾驶员模型可以联和V C U整车控制单元通过对比目标车速与实际车速来控制加速和制动信号[7]㊂控制原理如下:ΔV=V t a r g e t-V r e h;(1)S a c c=G P a c cΔV+G I a c cʏΔV d t+G A a c c d V t a r g e t;(2)S b r a k=-G P b r a kΔV-G I b r a kʏΔV d t-G A b r a k d V t a r g e t㊂(3)式中:S a c c为加速信号;S b r a k为制动信号;V t a r g e t为目标车速;V r e h为实际车速;G为车辆质量;P a c c㊁I a c c㊁A a c c 分别为加速控制的P I D增益系数;P b r a k㊁I b r a k㊁A b r a k分别为制动控制的P I D增益系数,t为时间㊂2)动力电池模型㊂本文选取的是D R V B A T001电池模型,这是电池模型的一类子型号,这种电池是由电池组串联或并联而成的㊂电池的输出电压可用以下公式进行计算:U o u t =U o -R I ㊂(4)式中:U o u t 为电池输出电压;U o 为电池开路电压;R 为等效电阻;I 为输入电流㊂在变电压情况下,它包括一个内阻模型㊂需要实验数据来描述开路电压和内阻㊂开路电压和内阻取决于温度和电池S O C ㊂其中电池S O C (又称电池荷电状态)值计算公式如下:d V S O C d t =-I 100C n o m ㊂(5)式中C n o m 为电池额定容量㊂3)电机模型㊂纯电动汽车传动系统中电机为整车提供动力,是电动汽车的核心㊂其将电能转换为机械能的过程中有一定的能量损失㊂本文选用D R V E M 02-电机模型,它是一个带有变频器的电动机模型㊂其输出转矩和功率损耗可以通过数据文件或特征参数来确定㊂电机输出的扭矩限制条件如下:T m i n ɤT ɤT m a x ㊂(6)式中:T m i n 为电机最小扭矩;T m a x 最大扭矩㊂4)车辆模型㊂与传统汽车相比,纯电动汽车最大的变化是它的动力系统,用动力电池和驱动电机取代了传统发动机㊂汽车上的其他系统,如车身㊁方向盘和悬架等,基本上维持了传统的运行原理和结构[8]㊂类似的原理和结构使得电动车具有与传统汽车相同的行驶阻力,研究方法和过程也大致相同㊂由汽车理论可知,车辆行驶时受到总的阻力为ðF =F f +F i +F w +F j ㊂(7)式中:F f 为滚动阻力,N ;F i 为坡度阻力,N ;F w 为空气阻力,N ;F j 为加速阻力,N ㊂则电动车驱动力-行驶阻力的平衡方程为F d =F f +F i +F w +F j(8)或T t q i g i o ηT r =G f +G i +C D A u 2a 21.15+δm d u d t ㊂(9)式中:F d 为车辆行驶需求驱动力,N ;T t q 为驱动电机转矩,N ㊃m ;i g 为变速器传动比;i o 为主减速器传动比;ηT 为传动效率;r 为车轮半径;G 为汽车所受重力,N ;f 为滚动阻力系数;i 为坡度;C D 为风阻系数;A 为迎风面积,m 2;u a 为车速,k m ㊃h -1;δ为旋转质量换算系数;m 为汽车质量,k g ;d u d t 为加速度,m ㊃s -2㊂本文选用D R V V E H 02-车辆模型,这是车辆的一个子模型㊂5)整车控制器模型㊂整车控制器(V C U )包括4个模块,有输入㊁输出信号传输模块㊁驱动控制策略模块㊁制动控制模块㊂整车控制器模型是纯电动汽车动力传动系统建模的核心,本文选用D R V V C U E 03-电动汽车控制单元模型,图2是它的驱动程序命令,它是使用来自驾驶员的加速和制动命令计算扭矩的㊂图2 V C U 制动策略F i g .2 V C Ub r a k i n g s t r a t e g y1.3 动力传动系统模型的建立在动力传动系统模型的搭建过程中,暂不考虑电机和动力电池等部件的热特性,因此把热接口都设置成定值[910]㊂动力传动系统模型如图3所示,主要包括驾驶员模型㊁整车控制器模型㊁传动系统模型㊁电驱系统模型等㊂351第2期 王楷焱等:某纯电动汽车动力系统能量仿真分析图3动力传动系统模型F i g.3D r i v e t r a i nm o d e l2模型仿真分析设置仿真工况为N E D C循环工况,环境温度为25ħ,车辆总质量为1206k g,车辆最大制动力矩为1000N m,电机扭矩范围为-208~208N m,仿真时间为1180s㊂车辆控制单元(V C U)分析驾驶员的输入(加速和制动),并命令电机和车辆制动㊂对于制动指令,V C U可以命令电动机作为发电装置为电池充电㊂V C U对制动回收的控制策略是:当S O C值低于89%时,V C U授权制动再生,电机用于制动车辆和充电;当S O C值高于95%时,不授权制动再生㊂电机转速小于69r㊃m i n-1时,V C U不授权制动再生,电机转速大于71r㊃m i n-1时,授权制动再生㊂开始行驶时制动力矩仅由车辆制动器提供,当电机转速到达设定值后将制动扭矩分成2部分:车辆制动扭矩为60%,电机扭矩为40%㊂图4表示在开始阶段电池S O C值低于95%,此时处于低阈值状态,V C U会授权制动再生;当S O C 值高于95%时,即高阈值状态,不再进行制动能量回收;S O C值低于89%时,再次回到低阈值状态, V C U再次授权制动再生,一直到S O C值为95%以上时停止授权㊂图5表示初始阶段电机转速较低,此时电机转速处于低阈值状态,没有制动回收㊂当电机转速达到71r㊃m i n-1,达到高阈值状态,V C U授权制动回收;当电机转速低于69r㊃m i n-1时,停止制动回收,直到电机转速再次达到71r㊃m i n-1时,V C U会启用制动再生㊂图4S O C阈值F i g.4T h r e s h o l do f S O C图5电机转速阈值F i g.5M o t o r s p e e d t h r e s h o l d451沈阳大学学报(自然科学版)第35卷选择齿轮传动比的时候考虑其爬坡能力,传动比越大其爬坡能力越强,图6可以看出汽车运行相同的时间,传动比为5时,电池S O C 值下降最慢,传动比为8时,S O C 值下降最快;制动时,传动比为7和8的回收量大致相同,传动比为5的回收效率最好,传动比为6时回收效率最差㊂图7表示的是不同的传动比下的电机输入到汽车的转速,当传动比为8时,转速曲线已经有明显的变形,传动比为5㊁6和7时,转速曲线大致相同㊂结合图6考虑,在实际操作中,传动比选择5㊂图6 电池S O C F i g .6 S O Co f b a t t e r y 图7 输入转速F i g .7 R o t a t i o n a l s p e e do f i n pu t 图8表示的是相同条件下汽车质量不同时对电池S O C 的影响㊂开始运行时各种质量的汽车其电池S O C 值下降情况大致相同,运行时间越长差距越明显,汽车质量越小S O C 值下降得越慢,经济性越好且随着工况运行对电池S O C 的影响越大㊂实验中要以真实情况为准㊂图9表示的是风速对电池S O C 的影响,设置运行时长10000s ㊂起始阶段,各工况运行差异不大,运行到1000s 时开始出现明显差异㊂无风(风速为0m ㊃s -1)状态下,电池S O C 使用情况是最优的㊂三级风(风速为3.4~5.4m ㊃s -1)时,电池S O C 下降状态明显,运行期间S O C 值下降约91%,而无风工况下运行S O C 值只下降约70.5%,风速对电池S O C 的使用有较大影响㊂图8 汽车质量对S O C 的影响F i g .8 E f f e c t o f v e h i c l ew e i g h t o nS O C 图9 风速对S O C 的影响F i g .9 E f f e c t o fw i n d s pe e do nS O C 3 结 论本文中用仿真软件搭建了纯电动汽车动力传动模型并且设置相关参数,提出了电池S O C 在不同电量下的V C U 对制动回收的控制以及在电机不同转速下V C U 对制动回收的控制,对比了不同影响因素下汽车输入转速和电池S O C 的情况,得到以下结论:1)传动比为5时,电池使用情况最优且转速曲线符合实际曲线,传动比为6时,能量回收效果最差;传动比为8时,转速曲线已经有明显的变形且电池S O C 使用情况较差㊂2)汽车总质量越小,行驶中电池S O C 值下降越慢且差异性变化明显㊂3)速度保持不变的情况下,无风状态时电池S O C 下降最慢;随着风力增大,S O C 下降增大㊂随着551第2期 王楷焱等:某纯电动汽车动力系统能量仿真分析651沈阳大学学报(自然科学版)第35卷运行时长增加,无风和三级风对电池S O C的影响体现出较大差异㊂从S O C值的变化和车速可以计算出汽车的行驶里程,当S O C值从90%到10%时,汽车的行驶距离约为133k m㊂通过该仿真分析可以直观的看到能量传输情况,也可以监测整个动力传动系统的能量回收情况,为实现整车系统最优控制和降低车辆能耗提供帮助㊂参考文献:[1]李渝丽.基于轮毂电机的纯电动汽车动力系统匹配研究[D].太原:中北大学,2020.L IY L.R e s e a r c ho n p o w e r t r a i n m a t c h i n g o f p u r ee l e c t r i cv e h i c l eb a s e do nh u b m o t o r[D].T a i y u a n:N o r t h U n i v e r s i t y o fC h i n a,2020.[2]沈童.面向极限工况的分布式驱动电动汽车纵横协同控制研究[D].南京:东南大学,2021.S H E N T.R e s e a r c h o nl o n g i t u d i n a la n dl a t e r a lc o o r d i n a t i v e c o n t r o lf o r d i s t r i b u t e d d r i v i n g e l e c t r i c v e h i c l e u n d e re x t r e m ec o nd i t i o n[D].N a n j i n g:S o u t he a s tU n i v e r s i t y,2021.[3]徐金波.纯电动汽车驱动控制策略与能量管理策略分析[D].西安:长安大学,2019.X UJB.A n a l y s i so fd r i v ec o n t r o ls t r a t e g y a n de n e r g y m a n a g e m e n ts t r a t e g y f o r p u r ee l e c t r i cv e h i c l e[D].X i a n:C h a n g a n U n i v e r s i t y,2019.[4]陈挺.一种新能源船混合动力电源管理系统设计与实现[D].海口:海南大学,2021.C H E N T.D e s i g na n di m p l e m e n t a t i o no fah y b r i d p o w e r m a n a g e m e n ts y s t e m f o ran e w e n e r g y s h i p[D].H a i k o u:H a i n a nU n i v e r s i t y,2021.[5]张元元.电动车传动系扭转振动主动控制研究综述[J].科学技术创新,2017(26):1718.Z HA N G Y Y.A r e v i e w o fr e s e a r c ho na c t i v ec o n t r o lo ft o r s i o n a lv i b r a t i o no fe l e c t r i cv e h i c l ed r i v e t r a i n[J].S c i e n t i f i ca n d T e c h n o l o g i c a l I n n o v a t i o n,2017(26):1718.[6]陈红爱.纯电动汽车的能量流仿真及能耗分析[D].重庆:重庆理工大学,2021.C H E N H A.E n e r g y f l o w s i m u l a t i o na n de n e r g y c o n s u m p t i o na n a l y s i so f p u r ee l e c t r i cv e h i c l e s[D].C h o n g q i n g:C h o n g q i n gU n i v e r s i t y o fT e c h n o l o g y,2021.[7]陆训,刘敏,汪跃中,等.纯电动汽车能量管理仿真分析研究[J].汽车电器,2019(8):1923.L U X,L I U M,WA N G YZ,e t a l.S i m u l a t i o na n a l y s i so f b a t t e r y e l e c t r i cV e h i c l eE n e r g y m a n a g e m e n t[J].A u t oE l e c t r i cP a r t s, 2019(8):1923.[8]董浩.基于能量流测试与仿真的汽油混合动力系统节能研究[D].长沙:湖南大学,2021.D O N G H.R e s e a r c h o n e n e r g y c o n s e r v a t i o n o f g a s o l i n e h y b r i d p o w e r s y s t e mb a s e d o n e n e r g y f l o we x p e r i m e n t a n d s i m u l a t i o n[D].C h a n g s h a:H u n a nU n i v e r s i t y,2021.[9]S H R I V A S T A V A R,P O R R A SAF,A L L E N DB.E l e c t r i f i e dv e h i c l e t h e r m a lm a n a g e m e n t s y s t e m:U S20200231024[P].20200723.[10]陆训,汪跃中,张朝闻.基于AM E s i m纯电动汽车高温适应性分析研究[J].汽车实用技术,2019(5):2931.L U X,WA N G Y Z,Z H A N G C W.S t u d y o nh i g ht e m p e r a t u r ea d a p t a b i l i t y o fe l e c t r i cv e h i c l eb a s e do n A m e s i m s o f t w a r e[J].A u t o m o b i l eA p p l i e dT e c h n o l o g y,2019(5):2931.ʌ责任编辑:肖景魁ɔ。
电动汽车论文:四轮独立转向四轮独立驱动目标函数仿真分析MATLAB

电动汽车论文:四轮独立转向四轮独立驱动目标函数仿真分析MATLAB【提示】本文仅提供摘要、关键词、篇名、目录等题录内容。
为中国学术资源库知识代理,不涉版权。
作者如有疑义,请联系版权单位或学校。
【摘要】车辆的操纵稳定性是评价车辆主动安全性能重要指标之一,对于如何评价车辆稳定性能,是研究车辆安全性能一个非常重要的课题。
四轮独立转向系统车辆能够很好的改善汽车横向动力学特性,本课题的研究是基于四轮独立转向系统控制策略下的操纵动力学特性,对四轮独立转向电动汽车仿真进行了分析和研究。
首先,介绍了燕山大学独立开发设计的四轮独立驱动四轮独立转向(4WID-4WIS)电动汽车硬件结构以及控制系统组成,在此车辆基础上建立整车二自由度动力学线性模型,应用Matlab软件对此线性模型进行离散化处理,得到相应矩阵参数,建立不同速度的离散化模型,为下文控制器模型设计打下基础。
其次,对整车控制器进行设计。
建立不同速度模型下离散模型目标函数,应用Fmincon函数建立控制器优化函数,通过仿真试验验证,确定横摆角速度和质心侧偏角参数最佳组合。
最后,通过仿真实验验证控制器模型正确性。
在Matlab/Simulink模块中建立整车仿真模型,对低速、中高速下直线工况、加减速工况及转向工况分别进行仿真研究,分析车辆质心侧偏角和横摆角速度响应特性变化规律,同时得出车轮转角和车轮纵向力曲线。
仿真试验结果表明,对于四轮独立转向电动车,本文所设计控制器能够很好地改善其操纵稳定性,验证了控制器正确性。
【关键词】电动汽车;四轮独立转向;四轮独立驱动;目标函数;仿真分析;MATLAB;【篇名】四轮独立转向电动汽车的转向控制仿真研究【目录】四轮独立转向电动汽车的转向控制仿真研究摘要5-6Abstract6第1章绪论9-14 1.1 课题背景及研究意义9-11 1.1.1 电动汽车9-10 1.1.2 四轮独立转向技术10-11 1.1.3 动力学仿真技术11 1.2 国内外研究现状11-13 1.2.1 国外研究现状11-12 1.2.2 国内研究现状12-13 1.3 主要研究工作13-14 1.3.1 技术路线13 1.3.2 本文主要研究内容13-14第2章硬件介绍及建立车辆动力学模型14-26 2.1 硬件介绍14-18 2.1.1 硬件介绍14-17 2.1.2 四轮独立转向控制系统17-18 2.2 建立 4WIS 二自由度动力学模型18-25 2.2.1 轮胎数学模型18-19 2.2.2 四轮独立转向线性动力学模型19-22 2.2.3 可控性和可观测性22-23 2.2.4 连续模型离散化23-25 2.3 本章小结25-26第3章控制器设计26-44 3.1 控制策略研究26-28 3.1.1 传统四轮转向汽车控制系统26-27 3.1.2 四轮独立转向控制思想27-28 3.1.3 整车控制框图28 3.2 控制器设计28-34 3.2.1 问题提出28-30 3.2.2 确定目标函数30-33 3.2.3 Fmincon 函数介绍33-34 3.3 软件介绍及确定参数34-43 3.3.1 Matlab 软件简介34 3.3.2 确定参数C1 和C34-39 3.3.3 确定参数α1 和α239-43 3.4 本章小结43-44第4章仿真试验结果及分析44-59 4.1 建立仿真系统模型44-45 4.2 仿真及分析45-57 4.2.1 直线行驶工况分析45-51 4.2.2 转向工况分析51-53 4.2.3 加速工况分析53-55 4.2.4 减速工况分析55-57 4.3 仿真试验结论57-58 4.4 本章小结58-59结论59-60参考文献60-63攻读硕士学位期间承担的科研任务与主要成果63-64致谢64-65作者简介65(英文版)Two regulations promulgated for implementation is in the party in power for a long time and the rule of law conditions, the implementation of comprehensive strictly strategic plan, implementation in accordance with the rules and discipline to manage the party, strengthen inner-party supervision of major initiatives. The two regulations supporting each other, the < code > adhere to a positive advocate, focusing on morality is of Party members and Party leading cadres can see, enough to get a high standard; < rule > around the party discipline, disciplinary ruler requirements, listed as "negative list, focusing on vertical gauge, draw the party organizations and Party members do not touch the" bottom line ". Here, the main from four square face two party rules of interpretation: the first part introduces two party Revised regulations the necessity and the revision process; the second part is the interpretation of the two fundamental principles of the revision of laws and regulations in the party; the third part introduces two party regulations modified the main changes and needs to grasp several key problems; the fourth part on how to grasp the implementation of the two regulations of the party. < code > and < Regulations > revised the necessity and revisedhistory of the CPC Central Committee the amendment to the Chinese Communist Party members and leading cadres honest politics several guidelines > and < Chinese Communist Party discipline and Punishment Regulations > column 1 by 2015 to strengthen party laws and regulations focus. Two party regulations revision work lasted a Years, pooling the wisdom of the whole party, ideological consensus, draw historical experience, respect for the wisdom of our predecessors, which reflects the unity of inheritance and innovation; follow the correct direction, grasp the limited goals, adhere to the party's leadership, to solve the masses of the people reflect a focus on the problem. The new revision of the < code > and < rule >, reflects the party's 18 and the eighth session of the third, the spirit of the fourth plenary session, reflecting the experience of studying and implementing the General Secretary Xi Jinping series of important speech, reflects the party's eighteen years comprehensive strictly practice. (a) revised two regulations of the party need of < the ICAC guidelines > in < in 1997 Leaders as members of the Communist Party of China clean politics certain criteria (Trial) > based on revised, the promulgation and implementation of January 2010, to strengthen the construction of the contingent of leading cadres play animportant role. But with the party to manage the party strictly administering the deepening, has not been able to fully meet the actual needs. Content is too complicated, "eight prohibition, 52 are not allowed to" hard to remember, and also difficult to put into practice; the second is concisely positive advocated by the lack of prohibited provisions excessive, no autonomy requirements; the third is banned terms and discipline law, both with the party discipline, disciplinary regulations repeat and Criminal law and other laws and regulations repeat; the fourth is to "clean" the theme is not prominent, not for the existing problems, and is narrow, only needle of county-level leading cadres above. < rule > is in 1997 < Chinese Communist Party disciplinary cases (Trial) > based on revision, in December 2003 the promulgation and implementation, to strengthen the construction of the party play very important role. Along with the development of the situation, which many provisions have been unable to fully meet the comprehensive strictly administering the practice needs. One is Ji law, more than half of the provisions and criminal law and other countries laws and regulations Repetition; two is the political discipline regulations is not prominent, not specific, for violation of the party constitution, damage theauthority of Party Constitution of misconduct lack necessary and serious responsibility to pursue; third is the main discipline for the leading cadres, does not cover all Party members. Based on the above situation, need to < the criterion of a clean and honest administration > and < rule > the two is likely to be more relevant regulations first amendment. By revising, really put the authority of Party discipline, the seriousness in the party tree and call up the majority of Party members and cadres of the party constitution of party compasses party consciousness. (II) two party regulations revision process the Central Committee of the Communist Party of China attaches great importance to two regulations revision . Xi Jinping, general books recorded in the Fifth Plenary Session of the eighth session of the Central Commission for Discipline Inspection, on the revised regulations < > made clear instructions. According to the central deployment, the Central Commission for Discipline Inspection from 2014 under six months begin study two regulations revision. The Standing Committee of the Central Commission for Discipline Inspection 4 review revised. Comrade Wang Qishan 14 times held a special meeting to study two regulations revision, amendment clarifies the direction, major issues of principle, path and target,respectively held a forum will listen to part of the province (area) secretary of the Party committee, Secretary of the Discipline Inspection Commission, part of the central ministries and state organs DepartmentThe first party committee is mainly responsible for people, views of experts and scholars and grassroots party organizations and Party members. Approved by the Central Committee of the Communist Party of China, on 7 September 2015, the general office of the Central Committee of the Party issued a notice to solicit the provinces (autonomous regions, municipalities) Party, the central ministries and commissions, state ministries and commissions of the Party (party), the General Political Department of the military, every 3 people organization of Party of two regulations revision opinion. Central Commission for Discipline Inspection of extensive solicitation of opinions, careful study, attracting, formed a revised sent reviewers. In October 8 and October 12, Central Committee Political Bureau Standing Committee and the Political Bureau of the Central Committee After consideration of the two regulations revised draft. On October 18, the Central Committee of the Communist Party of China formally issued two regulations. Can say, two laws amendment concentrated thewisdom of the whole party, embodies the party. Second, < code > and < Regulations > revision of the basic principles of two party regulations revision work and implement the party's eighteen, ten eight plenary, the spirit of the Fourth Plenary Session of the Eleventh Central Committee and General Secretary Xi Jinping important instructions on the revised < low political criterion > and < Regulations >, highlighting the ruling party characteristics, serious discipline, the discipline quite in front of the law, based on the current, a long-term, advance as a whole, with Bu Xiuding independent < rule > and < rule >. Main principle is: first, adhere to the party constitution to follow. The constitution about discipline and self-discipline required specific, awaken the party constitution of party compasses party consciousness, maintaining the authority of the constitution. General Secretary Xi Jinping pointed out that "no rules, no side round. Party constitution is the fundamental law, the party must follow the general rules. In early 2015 held the eighth session of the Central Commission for Discipline Inspection Fifth Plenary Session of the 16th Central Committee, Xi Jinping again pointed out that constitution is the party must follow the general rules, but also the general rules." the revision of the< code > and < rule > is Method in adhere to the regulations established for the purpose of combining rule of virtue is to adhere to the party constitution as a fundamental to follow, the constitution authority set up, wake up the party constitution and party rules the sense of discipline, the party constitution about discipline and self-discipline specific requirements. 4 second is to adhere to in accordance with the regulations governing the party and the party. The Party of rule of virtue "de", mainly refers to the party's ideals and beliefs, excellent traditional style. The revised the < code > closely linked to the "self-discipline", insisting on the positive initiative, for all members, highlight the "vital few", emphasized self-discipline, focusing on the morality, and the majority of Party members and the ideological and moral standards. The revised < > Ji method separately, Ji, Ji Yan to Method, as a "negative list", emphasizing the heteronomy, focusing on vertical gauge. Is this one high and one low, a positive reaction, the strict party discipline and practice results transformation for the integration of the whole party to observe moral and discipline requirements, for the majority of Party members and cadres provides benchmarking and ruler. Third, insist on to. In view of the problems existing in theparty at the present stage, the main problems of Party members and cadres in the aspect of self-discipline and abide by the discipline to make clearly defined, especially the party's eighteen years strict political discipline and political rules, organization and discipline and to implement the central eight provisions of the spirit against the four winds and other requirements into Disciplinary provisions. Not one pace reachs the designated position, focusing on in line with reality, pragmatic and effective. After the revision of major changes, major changes in the < code > and < rule > modified and needs to grasp several key problems (a) < code > < code > adhere to according to regulations governing the party and party with morals in combination, for at the present stage, the leadership of the party members and cadres and Party members in existing main problems of self-discipline, put forward principles, requirements and specifications, showing Communists noble moral pursuit, reflected at all times and in all over the world ethics from high from low 5 common requirements. One is closely linked to the "self-discipline", removal and no direct relation to the provisions of . the second is adhere to a positive advocate, "eight prohibition" 52 are not allowed to "about the content of the" negative list moved into synchronizationamendment < cases >. Three is for all the party members, will apply object from the leadership of the party members and cadres to expand to all Party members, fully embodies the comprehensive strictly required. The fourth is prominent key minority, seize the leadership of the party members and cadres is the key, and put forward higher requirements than the ordinary Party members. Five is to simplify, and strive to achieve concise, easy to understand, easy to remember. The revised < code > is the ruling Party since the first insists on a positive advocate forAll Party members and the self-discipline norms, moral declaration issued to all members of the party and the National People's solemn commitment. > < criterion of a clean and honest administration consists of 4 parts, 18, more than 3600 words. After the revision of the < code >, a total of eight, 281 words, including lead, specification and Party member cadre clean fingered self-discipline norms, etc. Part 3 members low-cost clean and self-discipline, the main contents can be summarized as "four must" "eight code". Lead part, reiterated on ideal and faith, fundamental purpose, the fine traditions and work style, noble sentiments, such as "four must" the principle of requirements, strong tone of self-discipline, The higher request for 6 andsupervised tenet, the foothold in permanent Bao the party's advanced nature and purity, to reflect the revised standards requirements. Members of self-discipline norms around the party members how to correctly treat and deal with the "public and private", "cheap and rot" thrifty and extravagance "bitter music", put forward the "four norms". Party leader cadre clean fingered self-discipline norms for the leadership of the party members and cadres of the "vital few", around the "clean politics", from civil servant of the color, the exercise of power, moral integrity, a good family tradition and other aspects of the leadership of the party members and cadres of the "four norms" < > < norm norm. "The Party member's self-discipline norms" and "party members and leading cadre clean fingered self-discipline norms," a total of eight, collectively referred to as the "eight". "Four must" and "eight" of the content from the party constitution and Party's several generation of leaders, especially Xi Jinping, general secretary of the important discussion, refer to the "three discipline and eight points for attention" statements, and reference some embody the Chinese nation excellent traditional culture essence of epigrams. (2) the revised regulations, the main changes in the revised Regulations > to fully adapt to thestrictly requirements, reflects the according to the regulations governing the law of recognition of deepening, the realization of the discipline construction and Jin Ju. < rule > is party a ruler, members of the basic line and follow. And the majority of Party members and cadres of Party organizations at all levels should adhere to the bottom line of thinking, fear discipline, hold the bottom line, as a preventive measure, to keep the party's advanced nature and purity. 1, respect for the constitution, refinement and discipline. Revised < rule > from comprehensive comb physical constitution began, the party constitution and other regulations of the Party of Party organizations and Party discipline requirements refinement, clearly defined in violation of the party constitution will be in accordance with regulations to give the corresponding disciplinary action. The original 10 categories of misconduct, integration specification for political discipline, discipline, honesty and discipline masses Ji Law and discipline and discipline and other six categories, the content of < rule > real return to Party discipline, for the majority of Party members and listed a "negative list. 7 2, highlighting the political discipline and political rules. > < Regulations according to the stage of the discipline of outstandingperformance, emphasizing political discipline and political rules, organization and discipline, in opposition to the party's leadership and the party's basic theory, basic line, basic program and basic experience, the basic requirement of behavior made prescribed punishment, increase the cliques, against the organization such as violation of the provisions, to ensure that the central government decrees and the Party of centralized and unified. 3, adhere to strict discipline in the law and discipline In front, Ji separated. Revised < Regulations > adhere to the problem oriented, do Ji separated. Any national law existing content, will not repeat the provisions, the total removal of 79 and criminal law, repeat the content of the public security management punishment law, and other laws and regulations. In the general reiterated that party organizations and Party members must conscientiously accept the party's discipline, die van comply with national laws and regulations; at the same time, to investigate violations of Party members and even criminal behavior of Party discipline and responsibility, > < Regulations distinguish five different conditions, with special provisions were made provisions, so as to realize the connection of Party discipline and state law. 4, reflect Wind building and anti-corruptionstruggle of the latest achievements. < rule > the party's eighteen years implement the spirit of the central provisions of the eight, against the requirements of the "four winds" and transformation for disciplinary provisions, reflecting the style construction is always on the road, not a gust of wind. In the fight against corruption out of new problems, increase the trading rights, the use of authority relatives profit and other disciplinary terms. Prominent discipline of the masses, the new against the interests of the masses and ignore the demands of the masses and other disciplinary terms and make provisions of the disposition and the destruction of the party's close ties with the masses.Discipline to protect the party's purpose. 8 of these regulations, a total of three series, Chapter 15, 178, more than 24000 words, after the revision of the regulations a total of 3 series, Chapter 11, 133, 17000 words, divided into "general" and "special provisions" and "Supplementary Provisions" Part 3. Among them, add, delete, modify the provisions of the proportion of up to nearly 90%. 1, the general general is divided into five chapters. The first chapter to the regulations of the guiding ideology, principles and scope of application of the provisions, highlight the strengthening ofthe party constitution consciousness, maintenance the authority of Party Constitution, increase the party organizations and Party members must abide by the party constitution, Yan Centralized centralized, would examine at all levels of the amended provisions implementing and maintaining Party discipline, and consciously accept the party discipline, exemplary compliance with national laws and regulations. The second chapter of discipline concept, disciplinary action types and effects of the regulations, will be a serious warning from the original a year for a year and a half; increase the Party Congress representative, by leaving the party above (including leave probation) punishment, the party organization should be terminated its representative qualification provisions. The third chapter of the disciplinary rules of use prescribed in the discipline rectifying process, non convergence, not close hand classified as severely or heavier punishment. "Discipline straighten "At least eighteen years of five years, these five years is to pay close attention to the provisions of the central eight implementation and anti -" four winds ". The fourth chapter on suspicion of illegal party disciplinary distinguish five different conditions, with special provisions were madeprovisions, to achieve effective convergence of Party and country 9 method. < rule > the provisions of Article 27, Party organizations in the disciplinary review found that party members have committed embezzlement, bribery, dereliction of duty dereliction of duty and other criminal law act is suspected of committing a crime shall give cancel party posts, probation or expelled from the party. The second is < Regulations > Article 28 the provisions of Party organizations in the disciplinary review But found that party members are stipulated in the criminal law, although not involved in a crime shall be investigated for Party discipline and responsibility should be depending on the specific circumstances shall be given a warning until expelled punishment. This situation and a difference is that the former regulation behavior has been suspected of a crime, the feeling is quite strict, and the latter for the behavior not involving crime, only the objective performance of the provisions of the criminal code of behavior, but the plot is a crime to slightly. < Regulations > the 29 provisions, Party organizations in the discipline review found that party members and other illegal behavior, affect the party's image, the damage to the party, the state and the people's interests, we should depend on the situationSeriousness given disciplinary action. The loss of Party members, seriously damaging the party's image of behavior, should be given expelled from the party. At this article is party member is in violation of the criminal law outside the other illegal acts, such as violates the public security administration punishment law, customs law, financial laws and regulations behavior. The fourth is < cases > Article 32 stipulates, minor party members and the circumstances of the crime, the people's Procuratorate shall make a decision not to initiate a prosecution, or the people's court shall make a conviction and exempted from criminal punishment shall be given within the party is removed from his post, probation or expelled from the party. Party members and crime, sheets were fined in accordance with For acts; the principal Ordinance amended the provisions of the preceding paragraph. This is the new content, in order to achieve Ji method effective convergence. Five is < > the thirty third article 10 of the provisions, the Party member due to an intentional crime is sentenced to criminal law (including probation) sheets or additional deprivation of political rights; due to negligence crime and was sentenced to three years or more (excluding three years) a penalty, shall give expelled punishment. Due to negligence crime is convictedand sentenced to three years (including three years) in prison or be sentenced to public surveillance, detention, shall in general be expelled from the party. For the individual may not be expelled from the party, should control Approval. This is followed and retained the original > < Regulations the provisions of punishment party authorization rules and report to a level party organizations. For is "party members with criminal acts, and by the criminal punishment, generally should be expelled from the party". The fifth chapter of probationary Party member of the discipline and discipline after missing members of the treatment and punishment decisions, such as the implementation of the provisions, clear the related party discipline and punishment decision made after, for duties, wages and other relevant alteration formalities for the longest time. 2, sub sub section will the original regulations of10 categories of acts of violation of discipline integration revised into 6 categories, respectively, in violation of the punishments for acts of political discipline "in violation of discipline behavior of punishment" in violation of integrity of disciplinary action points "of violation punishments for acts of mass discipline" "the violation of work discipline, punishment" in violation of discipline of life behaviorpunishment "6 chapters. 3, annex" Supplementary Provisions "clear authority making supplementary provisions of, cases of interpretative organ, as well as regulations implementation time and retroactivity etc.. 11 (3) learning understanding > < regulations needs to grasp several key problems The first problem -- about the violation of political discipline behavior > < new ordinance chapter 6 the political discipline column for the six disciplines, that is the main opposition to Party leadership and the opposition of the basic theory, basic line, basic program and basic experience, basic requirements of misconduct made provisions of the disposition, especially the eighteen since the CPC Central Committee put forward the Yan Mingzheng treatment of discipline and political rules requirements and practical achievements transformation for Discipline article, increase the false debate central policies, cliques, against the organization review, make no discipline of the principle of harmony terms. These are the party's eighteen years in comprehensive strictly Process combined with the practice of rich content. (1) false debate the central policies and undermine the Party of centralized and unified the problem is made in accordance with the provisions of the party constitution. Constitution in general programme requirementsadhere to democratic centralism is one of the requirements of the construction of the party must adhere to the four cardinal. Application of this principle is not only the party the basic organization principle and is also the mass line in party life, it requires that we must fully develop inner-party democracy, respect for the dominant position of Party members, safeguarding the Party member democratic rights, give full play to the enthusiasm and creativity of the party organizations at all levels and Party members, at the same time, also must implement the right concentration, ensure the party's mission < the chaos in unity and concerted action to ensure that the party's decision to get quickly and effectively implementing. The Party Central Committee formulated the major principles and policies, through different channels and ways, fully listen to the party organizations and Party members of the opinions and suggestions, but 12 is some people face to face not to say back blather "" will not say, after the meeting said, "" Taiwan does not say, and nonsense ", in fact, not only disrupt the people thought, some causing serious consequences, the damage to the Party of the centralized and unified, hinder the central policy implementation, but also a serious violation of the democratic system of principles. There is no doubt that shall, inaccordance with the Regulations > 4 Specified in Article 6 to give the appropriate punishment. For did not cause serious consequences, to give criticism and education or the corresponding tissue processing. (2) about the destruction of the party's unity < New Regulations > the forty eighth to fifty second article, to damage Party's unity unified and violation of political discipline, punishment situation made explicit provisions. Article 52 of the new "in the party get round group, gangs seek private gain, cliques, cultivate private forces or through the exchange of interests, for their own to create momentum and other activities to gain political capital, given a serious warning or withdraw from their party posts disposition; if the circumstances are serious, to give Leave a party to observation or expelled from the party. (3) on against the organization review of the provisions of the constitution, party loyalty honesty is party members must comply with the obligations. Members must obey the organization decision, shall not violate the organization decided encounters by asking questions to find organization, rely on the organization, shall not deceive the organization, against the organization. For example, after the investigation does not take the initiative to explain the situation, but to engage in。
两后轮驱动的电动轮汽车的动力学建模与仿真分析

No. 2CN 11-5904/U J Automotive Safety and Energy, 2010, Vol. 1 158—162电动轮汽车由于在驱动轮处采用电动轮技术而实现了多电机驱动,代替了传统电动汽车的中央驱动方式。
一般地,电动轮指电机到所驱动的车轮之间的所有部件,最简单的结构就是将电机与车轮组合成为一个整体。
电动轮驱动方式的优点在于,取消了传统汽车的传动轴和差速器等部件,使传动系统简化,不仅可以提高传动效率,而且有利于整车布置,提高车辆的通过性能,非常有利于低地板大客车和军用车辆的设计;由于减速装置布置在车轮附近,而且采用多个电动轮驱动,可以降低车辆对电气系统和机械传动零部件的要求,适合传递大转矩,非常适合于在大型矿用汽车上应用。
2002年,美国通用汽车提出了线控四轮驱动燃料电池概念车Autonomy,2005年推出后轮采用电动轮驱动的燃料电池电动车Sequel,2003年丰田汽车公司在东京国际车展上展示了四轮驱动燃料电池车Fine-S,2006年4月在美国纽约汽车展上又推出四个电动轮驱两后轮驱动的电动轮汽车的动力学建模与仿真分析陈 勇1,陆中奎2,周秋丽1(1.北京信息科技大学,北京 100192;2. 北京福田汽车股份有限公司,北京 102206)摘 要:为分析电动轮汽车的非悬挂质量增加对行驶平顺性、操纵稳定性的影响,建立了两后轮驱动的电动轮汽车整车的11自由度动力学模型。
在MATLAB/Simulink环境下,建立了整车仿真分析模型,采用模拟的路面谱作为路面输入,可实现不同车辆参数、不同控制策略和不同分析目标的仿真,也可分析车轮与路面之间的动载荷、悬架变形和车身姿态(俯仰、侧倾和横摆)的变化。
分析结论对电动轮汽车的开发、悬架的改进以及控制策略的确定具有参考意义。
关键词: 电动汽车;电动轮;控制策略;平顺性;操纵稳定性中图分类号: U469.72Dynamic modeling and simulation analysis of an electricvehicle with two rear hub-motorsCHEN Yong1, LU Zhongkui2, ZHOU Qiuli1(1. Beijing Information & Science Technology University, Beijing 100192, China;2. Beiqi Fonton Motor Co. Lts, Beijing 102206, China)Abstract: An 11 degree-of-freedom dynamic model was constructed for an electric vehicle driven with two rear hub-motors to analyze the infl uence on ride quality and the handling characteristics of unsprung mass increase. A full vehicle simulation model was developed using the MATLAB/Simulink with a simulated road model as input. The simulation model can realize the varies simulations with different vehicle parameters, control strategies and analyzing goals, while it can also determine the changes of dynamic load on tires, suspension defl ection and attitude (including pitch, roll and yaw). The above analyzed conclusions can enhance the development of electric vehicle driven by hub-motors, while they support the design of suspension and control strategies.Key words: electric vehicle; hub-motor; control strategy; ride quality; handling characteristics收稿日期:2010-01-22基金项目:辽宁省科学技术计划项目(2008220025);辽宁省高等学校优秀人才支持计划项目(RC-05-12)作者简介:陈勇(1966—),男(汉族),辽宁,教授。
轮边驱动系统_轮边减速器设计说明书

专业资料目录摘要 (3)Abstract. (4)0文献综述 (5)0.1轮边驱动系统发展背景 (5)0.2轮边驱动系统国内外发展现状 (6)1引言 (7)2研究基本内容 (8)3轮边驱动系统方案设计 (8)3.1驱动系统方案选定 (9)3.2减速装置方案选定 (9)4轮边驱动系统齿轮传动设计 (12)4.1轮边减速器的传动啮合计算 (12)4.1.1确定齿轮满足条件,进行配齿计算 (12)4.1.2齿轮材料及热处理工艺的确定 (13)4.1.3齿轮配合模数m计算 (13)4.1.4几何尺寸计算 (15)4.1.5齿轮传动啮合要素计算 (15)4.1.6齿轮强度校核 (16)5轮边减速器行星齿轮传动的均载机构选取 (23)6各传动轴的结构设计与强度校核 (25)6.1电机轴设计 (25)6.2行星轴设计 (26)6.3输出轴设计 (27)7减速器润滑与密封 (27)8轮边驱动系统三维建模与仿真 (28)8.1驱动系统齿轮零件建模 (28)8.2行星架建模 (30)8.3壳体与端盖建模 (31)8.4总装配爆炸模型 (33)8.5轮边驱动系统运动仿真 (34)8.5.1运动仿真建模 (34)9总结 (36)参考文献 (37)致谢 (38)基于Pro/E的小型电动车轮边驱动系统设计与运动仿真摘要:电动汽车一般使用可再生能源,其能源多元化与高效化,在城市交通中,可以实现极低排放,甚至零排放。
目前电动车能源主要来自电力,在众多的驱动系统形式中,采用轮边减速驱动系统结构形式是目前的主要发展方向。
目前轮边驱动系统主要采用的是轮毂电机,这种电机成本较高,制造过程复杂,并且主要应用于大型电动轿车上,在小型电动车上采用结构简单的轮边驱动系统还较少,本文提出了由一级2K-H (NGW)型行星传动组成的小型电动汽车用轮边驱动系统,并按照齿根弯曲强度和齿面接触强度计算公式对各级齿轮进行了设计;对各级齿轮、轴、轴承等进行了强度和寿命校核;对行星架的结构、齿轮箱的结构进行设计,并根据设计结果画出小型电动汽车轮边驱动系统零件图和总装图。
基于CarSim和Matlab四轮独立驱动轮毂电机电动汽车驱动控制系统的研究
基于CarSim和Matlab四轮独立驱动轮毂电机电动汽车驱动控制系统的研究作者:梅鸣来源:《山东工业技术》2016年第21期摘要:针对四轮独立驱动轮毂电机电动汽车驱动控制系统进行了建模与仿真,在传统PID 的基础上引入SOA智能优化算法,最后验证了所建立的CarSim和Matlab车辆模型的合理性。
关键词:电动汽车;驱动控制系统;车辆模型;SOA智能优化算法DOI:10.16640/ki.37-1222/t.2016.21.1630 引言近年来,绿色环保与可持续发展成为日益重要的发展理念。
本文研究的轮毂电机驱动电动汽车在现有商用化电动汽车的基础上省略了减速器、差速器和传动轴等机械零部件部件,直接由整车控制器发出控制信号直接控制车轮,这样节省车内空间,更容易实现电动车的微型化、轻量化[1-2]。
本文将CarSim中的内燃机模型和传动系统模型,修改为毂电机模型,在Matlab/Simulink中搭建电机模型和控制系统模块,在联合CarSim进行联合仿真。
1 四轮轮毂电机电动汽车建模在Matlab/Simulink中搭建轮毂电机模型,去掉CarSim中的传统内燃机汽车模型,通过Matlab/Simulink和CarSim联合仿真,搭建出四轮独立驱动轮毂电机电动汽车整车模型。
1.1 轮毂电机建模轮毂电机无刷直流电机,其主要由电机本体、霍尔位置传感器和电子逆变器构成。
无刷直流电机数学模型形式可表示为:其中ea,eb,ec分别表示定子a,b,c三相生成的梯形反电动势。
电磁转矩方程为:式中:Te为电磁转矩;w为电机角速度;Tl为负载转矩;J为转动惯量;B为黏滞摩擦系数;ua,ub,uc为绕组电压,ia, ib,ic为相电流;ea,eb,ec为相反电势;L为相绕组自感系数;M为相绕组互感系数。
式(1)、式(2)和式(3)共同构成了无刷直流电机的微分方程数学模型。
采用基于SOA的PID控制算法来控制轮毂电机,1.2 整车模型搭建打开CarSim 8.02 软件,选择B-Class, Hatchback选项作为基准车辆,将CarSim中原有的内燃机模型改为 4-wheel drive(四轮驱动),其内容定义为选择No dataset select方式,同时将四轮驱动转矩设置为车辆模型的输入量变量。
纯电动汽车驱动系统选型及仿真研究

纯电动汽车驱动系统选型及仿真研究一、本文概述随着全球能源危机和环境问题的日益严重,纯电动汽车作为一种环保、节能的交通工具,正逐渐受到人们的青睐。
然而,纯电动汽车驱动系统的选型及其性能优化是一个复杂而关键的问题。
本文旨在深入研究纯电动汽车驱动系统的选型原则、影响因素及优化方法,并通过仿真分析验证所选驱动系统的性能表现。
文章将概述纯电动汽车驱动系统的发展历程和现状,分析不同驱动系统的优缺点及适用范围。
在此基础上,提出驱动系统选型的基本原则,包括动力性、经济性、可靠性和环保性等方面的要求。
文章将详细分析影响驱动系统选型的关键因素,如电池性能、电机类型、控制系统等。
通过对这些因素的综合考虑,建立起一套完整的驱动系统选型评价体系,为实际选型提供科学依据。
文章将利用仿真软件对所选驱动系统进行性能仿真分析。
通过模拟不同工况下的车辆行驶状态,评估驱动系统的动力性、经济性等指标,为驱动系统的优化改进提供数据支持。
本文的研究成果将为纯电动汽车驱动系统的选型及性能优化提供有力支持,为推动纯电动汽车的广泛应用和产业发展提供有益参考。
二、纯电动汽车驱动系统概述纯电动汽车(Battery Electric Vehicle,BEV)作为新能源汽车的一种,其驱动系统是其核心组成部分,直接影响到车辆的性能、效率和安全性。
纯电动汽车的驱动系统主要由电机、控制器、电池和传动机构等组成,其中电机作为动力源,负责将电能转化为机械能,驱动车辆行驶。
电机的选型是纯电动汽车驱动系统设计的关键。
目前,常用的电机类型主要包括直流电机、交流异步电机、交流同步电机和开关磁阻电机等。
其中,交流同步电机和开关磁阻电机因其高效率和宽调速范围等特点,在纯电动汽车领域得到了广泛应用。
同时,随着电机控制技术的发展,电机的控制策略也日趋成熟,如矢量控制、直接转矩控制等,为电机的优化运行提供了有力支持。
控制器作为驱动系统的“大脑”,负责接收车辆的各种信号,如加速踏板信号、制动踏板信号、车速信号等,并根据这些信号控制电机的运行状态。
轮式驱动电动汽车驱动系统的研究

轮式驱动电动汽车驱动系统的研究一、本文概述随着全球对环境保护和能源消耗的日益关注,电动汽车(EV)作为一种清洁、高效的交通方式,正逐渐受到人们的青睐。
作为电动汽车的核心组成部分,驱动系统的性能直接影响到整车的动力性、经济性和舒适性。
本文旨在深入研究轮式驱动电动汽车的驱动系统,探讨其设计原理、性能特点以及优化策略,为电动汽车的进一步发展提供理论支持和实践指导。
本文首先介绍了轮式驱动电动汽车的基本原理和分类,阐述了轮式驱动系统相较于传统驱动系统的优势,如结构紧凑、传动效率高、驱动力分配灵活等。
接着,文章详细分析了轮式驱动电动汽车驱动系统的关键技术,包括电机选型、控制系统设计、能量管理策略等。
在此基础上,文章进一步探讨了轮式驱动系统在实际应用中的挑战和问题,如热管理、振动噪声、可靠性等,并提出了相应的解决方案和优化措施。
本文总结了轮式驱动电动汽车驱动系统的研究现状和发展趋势,展望了未来可能的研究方向和应用前景。
通过本文的研究,期望能够为轮式驱动电动汽车的驱动系统设计提供理论依据和技术指导,推动电动汽车行业的可持续发展。
二、轮式驱动电动汽车驱动系统概述轮式驱动电动汽车(Wheel-Driven Electric Vehicles, WDEVs)是电动汽车(EVs)领域的一种创新技术,它打破了传统电动汽车采用中央驱动轴的设计,将电动机直接安装在每个车轮内部或者车轮附近。
这种设计模式使得车辆可以更灵活、更高效地驱动和控制,是电动汽车技术发展的重要方向之一。
轮式驱动电动汽车驱动系统的核心在于将电动机、减速器和制动器等关键部件集成到车轮内部或附近,使得每个车轮都可以独立地进行驱动和制动。
这种设计不仅简化了车辆结构,减少了传动系统的复杂性,还提高了车辆的动态性能和操控性能。
每个车轮的独立驱动使得车辆可以更好地适应不同路况和行驶需求,例如独立调节车轮的驱动力和制动力,实现更精准的操控和更平稳的行驶。
轮式驱动电动汽车驱动系统还具有更高的能量利用效率和更低的能耗。
基于Simulink轮毂电机四轮驱动外特性建模与仿真

基于Simulink轮毂电机四轮驱动外特性建模与仿真肖平;李伟【摘要】为了解决传统纯电动汽车续航里程低、使用效率不高的问题,对四轮轮毂驱动电动汽车进行了研究.首先,在对四轮轮毂电动汽车系统结构进行分析的基础上,基于汽车动力学原理、三元聚合物锂电池电化学原理以及电动机外特性数据等建立包含汽车运动学模型、电池模型以及电机模型的四轮驱动电动汽车整车模型.基于两种工况进行了仿真试验,结果表明所研究的四轮驱动电动汽车具有良好的工作特性.【期刊名称】《聊城大学学报(自然科学版)》【年(卷),期】2017(030)003【总页数】7页(P104-110)【关键词】轮毂电机;四轮驱动;电动汽车;建模与仿真【作者】肖平;李伟【作者单位】安徽工程大学机械与汽车学院,安徽芜湖 241000;安徽工程大学机械与汽车学院,安徽芜湖 241000【正文语种】中文【中图分类】U469在能源危机与环境问题日益严重的今天,作为重要交通工具的汽车也受到很大影响,各大汽车公司都在寻找其他替代能源来解决能源与环境问题;电动汽车则可有效缓解能源紧张和环境污染的局面,电动汽车可分为纯电动汽车、混合动力汽车以及燃料电池汽车等.但混合动力汽车仍然需要燃烧石油因此不是最佳的结构形式、燃料电池汽车的燃料电池需要使用铂做电池材料,而这种材料在地球上储量非常有限,因此也不宜推广;纯电动汽车只有电池/电动机作为驱动系统,无需使用石油、不排放任何废气,是最理想的驱动形式.传统的纯电动汽车将发动机有电动机取代,保留变速器等传达系统,其机械结构复杂、成本高也不是最理想的纯电动汽车结构形式;而轮毂电机四轮独立驱动电动汽车将电动机与汽车车轮合为一体,将车轮的轮毂视为电机转子由电动机直接带动其旋转,大大简化了车辆的机械结构,最大特点就是将动力、传动和制动装置都整合到轮毂内,是非常理想的电动汽车结构形式.而目前关于四轮独立驱动电动汽车的研究还很少见,还有很多研究空间.本文以某四轮独立驱动电动汽车为对象,建立各系统数学模型与仿真模型[1],分别以日本1015工况和欧洲城市工况进行仿真试验.如图1所示,本文研究的四轮独立驱动电动汽车包括电池组、ECU、驱动系统、逆变器以及轮毂电机及车身等;其中,电池为15组三元聚合物锂电池、轮毂电机由4个无刷直流电机组成、逆变器的功率管采用MOS管、驱动系统采用MOS管专用驱动IRF3205.四轮独立驱动电动汽车的工作原理是:当驾驶员踩下加速踏板时,ECU采集到该信号,并根据该信号结合轮毂电机位置信号控制驱动电路驱动逆变器使轮毂电机得到电流产生电磁转矩驱动汽车前进.2.1 动力学模型汽车行驶时必须克服各种阻力[2],于是有式中Ft为驱动力;∑F为汽车所受阻力之和. 根据汽车的驱动原理可得式中Tt为作用在车轮上的转矩,r为车轮半径.Tt为电动机经过传动系传送到车轮的转矩,本车属于轮毂电机,电动机与车轮之间为刚性连接,故可认为车轮转矩就为电机转矩.汽车行驶阻力式中Ff为滚动阻力;Fw为空气阻力;Fi为坡度阻力;Fj为加速阻力.汽车的滚动阻力为式中W为车轮负载,f为滚动阻力系数,取式中ua为汽车前进的速度.根据空气动力学原理可得汽车在前进时的空气阻力为式中Cd为空气阻力系数,取0.4,A汽车为迎风面积.汽车前进时的坡度阻力为汽车沿坡道方向的分力,则有式中G为重力加速度,α坡度.汽车的加速阻力为式中δ为质量换算系数,为车辆加速度.结合以上各式,可得汽车行驶方程为2.2 电机模型本文研究的电动汽车轮毂电机选择电机为无刷直流电机,其结构简单、低速时大功率大以及可控性好等优点.电机的功率为10 kW、最大扭矩为110 N·m、最高转速为1 500 r/min.本文采用外特性建模,对轮毂电机进行台架实验得到电机转速与转矩之间的MAP图如图2下所示.同时,根据汽车行驶功率平衡方程,电动汽车的功率可由式(10)计算式中Pe为电机功率,α为爬坡度.根据轮毂电机的工作特点,可采用式(11)计算轮毂电机转速.基于以上原理,采用MATLAB/Simulink软件建立电机模型如图3所示.如图4所示,无刷直流电机在接收转矩指令信号,首先判断所接收的转矩指令信号是否超过电机参数中的最大转矩,用Simulink中的一维查表模块执行此操作,若查表后大于电机最大转矩则用最大转矩值以替代转矩指令信号,若不超过电机最大转矩则输出当前转矩.转矩输出后结合电机当前转速,根据MAP图用二维查表模块得到电机效率;得到效率后根据驾驶员操纵指令判断电机状态是发电(能量回收)还是用电,最后得到电功率并输入电池模型中.实际输出转矩与车轮半径运算得到驱动力[3],并按照动力学公式得到汽车行驶速度.2.3 电池模型三元聚合物锂电池[4]的正极材料使用的是镍钴锰酸锂(Li(NiCoMn)O2),其中的镍钴锰的比例可以根据实际需要调整,三元材料做正极的电池相对于钴酸锂电池安全性高.电池荷电状态(State of charge, SOC)表征电池充电量与额定电量的比值.本文电池采用内阻模型,即将电池看成由一个理想的电压源和内置电阻组成.电池的数学模型为[5]:电压平衡:E=U+IR. 做功平衡:EI=P+I2R. SOC计算式中SOC0为电池初始电量,U为电池开路电压,R为电池内阻,P为电机消耗功率,Abat为电池组额定容量.本模型要求以实际功率为输入,以剩余电量为输出.电池的Simulink模型如下图所示.3.1 整车模型本文研究的是四轮独立驱动电动汽车,其电池电压为360 V(单体电池组电压24 V 电池组数15),电机为10 kW(共4个)的无刷直流电动机,该车辆其他参数如表1所示.基于以上电机模型、电池模型、汽车运动学模型等,采用MATLAB/Simulink软件建立四轮驱动电动汽车仿真模型[6]如图5所示.在整车模型中为了提高系统的响应速度和控制精度,对驾驶员的操纵指令采用闭环控制,控制算法采用经典的PID算法[5].在给定工况下,驾驶员按照工况要求执行加速(驱动)、减速(制动)和转弯(转向)操作.模型首先对电机电磁力(包括驱动力和制动力)进行反馈,然后根据偏差运用 PID 算法计算出达到既定工况车速所需动力,将控制信号发送给电机驱动系统,驱动系统产生相应动力矩并将其分配给四个轮毂电机经过速度转化模型输出转速和速度[7].速度转化模型如图6所示.3.2 控制策略模型本实验的控制策略为:系统从驾驶员控制模型中得到汽车需求驱动力,经过车轮转化成转矩,将转矩平均分配前后轴的四个车轮,这是驱动力力矩传给电机模型,系统还需要判断是否需要作出制动,其策略为先把前轴或者后轴驱动力矩与1作比较若驱动力矩小于1则认为汽车没有产生驱动力矩也即没踩油门,这时输出制动力矩给电机模块[7].其控制策略的模块如图7.3.3 仿真及分析3.3.1 CYC_1015仿真及结果分析.为了检验本文所研究的四轮驱动电动汽车能否正常工作,选择与我国城市道路工况相类似的CYC_1015工况作为输入进行仿真试验,该工况单次循环时间为660 s,最高时速为70 km/h,怠速时间为215 s,该工况的速度-时间曲线如图8所示,仿真结果如图9所示.CYC_1015工况仿真结果如图9所示.由9(a)可以看出,在CYC_1015工况下循环10次行驶里程大约为115 km,平均车速为63 km/h,该平均速度符合我国城市道路时速不大于70 km/h的要求,说明仿真结果可信,从而也说明车辆模型建立正确.同时,从9(b)可以看出,10个工况运行结束之后电池损耗量约为29%,汽车电池消耗量合理,从图中可以看出电量消耗基本上是与时间成线性关系,所以按照当前消耗速度可以推算出电池电量完全消耗完耗时约为18 000 s,约合5 h,行驶里程可以达到315 km,基本可以应对城市行驶路况要求,也说明电池容量设置合理,电机规格选择合理;从9(c)可以看出,在仿真中,汽车的行驶速度与工况给定速度基本吻合,说明行驶速度能按照设计的速度运行,最高时速不高于80 km/h,这也进一步说明了仿真模型的正确性,同时也说明本文设计的四轮驱动电动汽车具有良好的工作特性.3.3.2 EUDC工况仿真及结果分析.为了进一步研究本文研究的混合动力电动汽车的工作性能,以类似于我国高速公路的欧洲城郊工况(EUDC)为输入进行仿真实验,该工况单个循环时间为400秒,最高时速为120 km/h,怠速时间仅为42 s,该工况速度-时间图如图10所示.经过10次循环仿真后的仿真结果如图11(a)、(b)、(c)所示.在EUDC工况下历经10个循环后的行驶里程如图11(a)所示,4 000 s(1.11 h)的行驶距离为125 km,得到其时速为113 km/h,该时速符合我国高速公路时速120 km/h以下的要求,这说明仿真结果可信可靠,进一步说明了整车模型的正确性.在经历10次EUDC工况循环后的SOC如11(b)所示,10次循环后SOC下降到50%,消耗量为30%,从图中可以看出,SOC消耗量与时间总体呈正比关系,行驶里程与时间总体同样呈正比关系,可以推算出电量消耗到零的时间为10 666 s,即2.96 h,结合图11(a)中的时速可得续航里程可达到350 km,相比于现阶段电动汽车续航里程有显提高,说明电池容量与电机规格选择合理,贴合实际.仿真期间的速度追踪如图11(c)所示,仿真速度与工况速度吻合度较高,说明整车模型能够按照给定工况下速度行驶,说明控制策略可行有效也说明系统模型正确高效. 根据新能源汽车发展现状,在传统纯电动汽车的基础上提出轮毂电机四轮独立驱动纯电动汽车[7].本文根据轮毂电机四轮独立驱动的特点,运用汽车动力学与电池相关原理,轮毂驱动电机外特性数据等,基于Matlab/Simulink搭建了四轮驱动电动汽车仿真模型模型.基于所建模型分别在CYC_1015工况和EUDC工况下进行两次仿真实验,得到车辆行驶里程、电池SOC随时间变化关系、车速等汽车动力学仿真结果,结果表明两种工况下汽车速度都能很好按照工况速度运行,说明所设计的整车模型的正确性和可行性;同时为四轮独立驱动汽车的设计与生产奠定了一定理论基础.【相关文献】[1] 靳彪,张欣,彭之川,等. 四轮轮毂电机驱动电动汽车建模与仿真 [J].中国公路学报, 2016, 29(4):138-144.[2] 张文春.汽车理论[M].5版.北京:机械工业出版社,2014.[3] 卢东斌,欧阳明高,谷靖.四轮驱动电动汽车永磁无刷轮毂电机转矩分配[J]. 清华大学学报:自然科学版,2012,(4):451-456.[4] 孟庆华,许进,王东峰. 轮毂电机驱动型电动汽车动力系统研究[J].农业机械学报,2013,(8):33-37.[5] 赵夕长,肖平.城市用电动汽车建模与仿真研究[J].北京汽车,2009(4):34-37.[6] 李刚,李宁,段敏,等.基于Simulink的四轮轮毂电机电动汽车仿真模型开发[J].辽宁工业大学学报,2012,(06):15-189.[7] Sakai Shin-Ichiro, Sado Hideo, Hori Yoichi. Dynamic driving/braking force distribution in electric vehicles with independently driven four wheels[J]. Electrical Engineering in Japan, 2002, 138(1): 79-89.。
基于CarSim和Matlab四轮独立驱动轮毂电机电动汽车驱动控制系统的研究

基于CarSim和Matlab四轮独立驱动轮毂电机电动汽车驱动控制系统的研究针对四轮独立驱动轮毂电机电动汽车驱动控制系统进行了建模与仿真,在传统PID的基础上引入SOA智能优化算法,最后验证了所建立的CarSim和Matlab 车辆模型的合理性。
标签:电动汽车;驱动控制系统;车辆模型;SOA智能优化算法0 引言近年来,绿色环保与可持续发展成为日益重要的发展理念。
本文研究的轮毂电机驱动电动汽车在现有商用化电动汽车的基础上省略了减速器、差速器和传动轴等机械零部件部件,直接由整车控制器发出控制信号直接控制车轮,这样节省车内空间,更容易实现电动车的微型化、轻量化[1-2]。
本文将CarSim中的内燃机模型和传动系统模型,修改为毂电机模型,在Matlab/Simulink中搭建电机模型和控制系统模块,在联合CarSim进行联合仿真。
1 四轮轮毂电机电动汽车建模在Matlab/Simulink中搭建轮毂电机模型,去掉CarSim中的传统内燃机汽车模型,通过Matlab/Simulink和CarSim联合仿真,搭建出四轮独立驱动轮毂电机电动汽车整车模型。
1.1 轮毂电机建模轮毂电机无刷直流电机,其主要由电机本体、霍尔位置传感器和电子逆变器构成。
无刷直流电机数学模型形式可表示为:其中ea,eb,ec分别表示定子a,b,c三相生成的梯形反电动势。
电磁转矩方程为:式中:Te为电磁转矩;w为电机角速度;Tl为负载转矩;J为转动惯量;B 为黏滞摩擦系数;ua,ub,uc为绕组电压,ia,ib,ic为相电流;ea,eb,ec 为相反电势;L为相绕组自感系数;M为相绕组互感系数。
式(1)、式(2)和式(3)共同构成了无刷直流电机的微分方程数学模型。
采用基于SOA的PID控制算法来控制轮毂电机,1.2 整车模型搭建打开CarSim 8.02 软件,选择B-Class,Hatchback选项作为基准车辆,将CarSim中原有的内燃机模型改为4-wheel drive(四轮驱动),其内容定义为选择No dataset select方式,同时将四轮驱动转矩设置为车辆模型的输入量变量。
纯电动汽车动力系统参数匹配选择及计算仿真
参数如表 4 所示。
表 4 电机参数
项目
基本参数
额定功率(kW) 峰值功率(kW) 额定扭矩(N·m) 峰值扭矩(N·m) 额定转速(r/min) 峰值转速(r/min)
45 100 115 250 3800 9000
3 减速器速比选择 3.1 减速器速比下限值的确定 由驱动电机的最大扭矩和最大爬坡度确定减速器传 动比下限 imin,公式如下:
30min 最高车速 uma(x km/h) 1km 最高车速 uma(x km/h)
最大爬坡度(%) (0-50)km/h 加速时间(s) (50-80)km/h 加速时间(s) (0-100)km/h 加速时间(s) 60km/h 等速续航里程 S(1 km)
工况续航里程 S(2 km)
逸105 逸105 逸20 臆6 臆5 臆15 逸400 逸300
(1)
(2)
式(2)中: c—系数,取值 1.2; f0—系数,取值 0.009; f1—系数,取值 0.0012; f4—系数,取值 0.0003。 根据(1)(2)式,可以计算出满足最高车速时,驱动电 机输出额定功率为 23.3kW。 2.1.2 以最大爬坡度确定驱动电机额定功率 根据最大爬坡度确定电机额定功率,电机功率 Pe2 应 满足如下公式:
(5)
滚动阻力系数 f 按照经验公式[1]: 要要要要要要要要要要要要要要要要要要要要要要要
作者简介院安洪雨(1982-),男,河北保定人,工程师,主要研究整 车总布置。
式(5)中 茁 为驱动电机扩大恒功率区系数,一般取 2耀 3,由此可知驱动电机峰值转速 nmax=8000耀12000r/min。
表 3 电机需求参数
项目
额定功率(kW) 峰值功率(kW) 额定扭矩(N·m) 峰值扭矩(N·m) 额定转速(r/min) 峰值转速(r/min)
轮毂电机驱动电动汽车平顺性控制仿真
力系统发展 的重要方 向之一 。但是 ,电动轮汽 车 因轮 毂 电机 因兼顾两者 使平 顺 性优 化受 到 一定 约 束。文 献 [2]建立 了
引入导致非 簧载质量增加 的问题 ,影 响汽车行驶 平顺性 及操 1/4电动轮 车辆线性振动模 型 ,以车身加 速度 、悬 架动挠度和
纵稳定性 。为了提高电动轮汽车 的平 顺性及 操纵稳 定性 ,研 车 轮 动 载 荷 均 方 根 值 之 和 为 优 化 目标 ,应 用 Pattern search函
stability, and provides reference f or param eter design of suspension system . KEYW ORDS:In—wheel motor:Ride comfor t simulation;Improved genetic algor ithm;Optimization
第35卷 第6期
文 章 编 号 :1006—9348(2018)06—0160—07
计 算 机 动 汽 车 平 顺 性 控 制 仿 真
郑 阳 ,陈 勇 ,赵 理
(北京信息科技大学 ,北京电动车辆协 同创新 中心 ,此 京 100192) 摘要 :电动轮汽车因轮毂电机的引入使非簧载质量增加 而影 响汽车平顺 性 ,针对悬 架优化算 法公式 复杂 、计 算效 率低 的问 题 ,提 出一种基于适应度估计的改进遗传算法对悬架 系统进 行优 化。以某 电动轮 汽车为研 究对 象 ,在 ADAMS中建立整 车 仿 真模 型 ,进 行 整 车 平顺 性 仿 真 分 析 ,以车 身 垂 向加 权 加 速 度 均 方 根值 及 俯 仰 角 加 速 度 均 方 根 值 为 优 化 目标 ,利 用 多学 科 多 目标 优 化 软件 ISIGHT对 悬 架 的 刚 度 及 阻 尼 进 行 优 化 。仿 真 结 果 表 明 :提 出 的 改进 遗 传 算 法 能 够 对 目标 函数 值 进 行 有 效 的 优化 ,且优化后的悬架系统在满足整车操纵稳定性 的同时改 善了整车平顺性 ,为悬架 系统参数设计提供参考 。 关键词 :轮毂 电机 ;平顺性仿真 ;改进遗传算法 ;优化 中 图 分 类 号 :U463.33;U469.72 文 献 标 识 码 :B
轮毂式电动车电子差速系统的动力学仿真
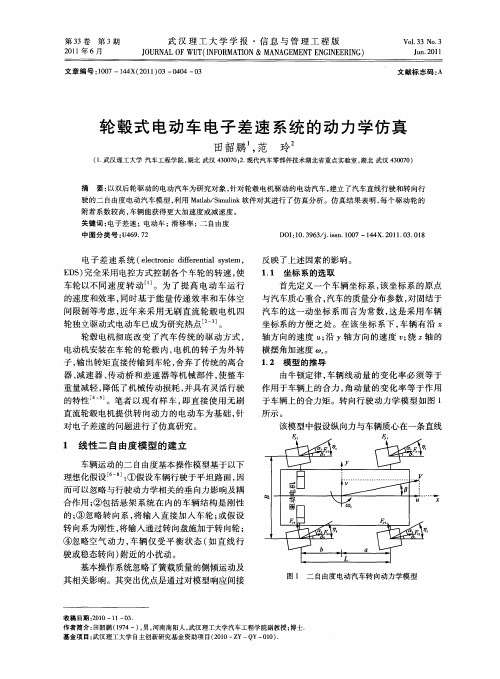
由牛顿定律 , 车辆线动量 的变化率必须等于 作用于车辆上的合力 , 角动量 的变化率等于作用 于车 辆上 的合力 矩 。转 向行驶 动 力 学模 型如 图 1
所示。
收稿 日期 :0 0—1 0 . 21 1— 3
作者简 介: 田韶鹏 (9 4一) 男 , 17 , 河南南 阳人 , 武汉理工大学汽车工程学院副教授 ; 博士 基金项 目: 武汉理工大学 自主创新研究基金资助项 目(0 0一Z 21 Y—Q Y一0 0 . 1) 第3 3卷Fra bibliotek第 3期
田韶鹏 , : 等 轮毂式 电动车 电子差 速系统的动力学仿真
的速度和效率 , 同时基 于能量传递效率和车体空 间限制等考虑 , 近年来采用无刷直流轮毂 电机 四 轮 独立驱 动式 电动车 已成 为研 究热 点 IJ 3。
轮毂 电机 彻 底 改 变 了 汽车 传 统 的驱 动 方 式 , 电动 机安 装在 车 轮 的 轮 毂 内 , 机 的 转子 为 外 转 电
该模 型 中假 设纵 向力 与 车辆质 心在 一条 直线
1 线性二 自由度模型 的建 立
车辆 运动 的二 自由度基 本操 作模 型基 于 以下
理想化假设 J①假设车辆行驶于平坦路面 , : 因
而可 以忽 略与行 驶 动力 学相 关 的垂 向力影 响及 耦 合 作用 ; 包括 悬 架 系 统 在 内的 车辆 结 构 是 刚 性 ②
45 0
上。其 中, 横向加速度包括车 辆车速 的横 向加 速度以及横摆角速度引起的横向加速度。二 自由 度汽车受到的外力沿 Y 轴方向的合力与绕质心 的 力 矩平 衡 方程分 别 为 :
电动轮汽车驱动系统的滑模-PID控制

电动轮汽车驱动系统的滑模-PID控制段婷婷;王春燕;赵万忠;张玉稳【摘要】针对电动轮汽车驱动系统响应时间过长,响应不稳定,鲁棒性差等问题,建立简化了的电动轮汽车整车动力学模型和永磁无刷直流轮毂电动机驱动模型.以滑模变结构理论和PID控制理论为基础,根据电动轮汽车驱动系统运行的动态特性品质及滑模运行的动、静态特性要求,分别设计系统外环滑模-PID决策控制器及内环PID跟踪控制器,通过内、外环控制的有效结合,使系统具有了兼顾滑模变结构控制稳定性好、鲁棒性高和PID控制简单易行、响应迅速的特点,提高了系统的控制品质.仿真结果表明:基于滑模-PID控制的驱动系统能够迅速控制整车驱动系统和轮毂电动机的运行,明显改善了汽车动力学特性和轮毂电动机特性.【期刊名称】《江苏大学学报(自然科学版)》【年(卷),期】2015(036)003【总页数】5页(P260-264)【关键词】电动轮汽车;轮毂电动机;驱动系统;滑模-PID;控制【作者】段婷婷;王春燕;赵万忠;张玉稳【作者单位】南京航空航天大学能源与动力学院,江苏南京210016;南京航空航天大学能源与动力学院,江苏南京210016;南京航空航天大学能源与动力学院,江苏南京210016;山东理工大学交通与车辆工程学院,山东淄博255049【正文语种】中文【中图分类】U461.1电动轮汽车驱动系统是采用4个独立控制的轮毂电动机分别为车辆的4个车轮提供驱动转矩,将电能转化为机械能,再以电动机的输出轴作为驱动轴,将动能传送到车轮驱动汽车行驶[1-3].由于各电动轮的驱动力直接独立可控,其动力学控制更为方便、灵活,能合理控制各电动轮的驱动力,从而提高恶劣路面下的行驶性能[4-6].轮毂电动机驱动系统作为电动轮汽车的关键组成部分,它的输出特性直接决定了电动轮汽车的动力特性[7].目前,轮毂电动机主要有直流电动机、感应电动机、开关磁阻电动机以及永磁无刷电动机等几种类型.其中永磁无刷直流电动机既具有交流电动机的结构简单、运行可靠、维护方便等特点,又具有直流电动机的运行效率高、无励磁损耗以及调速性能好等诸多优点,在电动汽车方面得到广泛认同[8-9].目前,国内外关于电动轮汽车驱动系统的研究主要集中在新型电动机的应用及电动机驱动系统控制2个方面.新型电动机如双转子轴向磁通电动机、反相双转子电动机等,往往使驱动系统结构复杂,不能充分发挥电动轮驱动的优势,同时使各车轮驱动力难以实现独立控制[10].在电动机驱动系统控制方面:文献[11]设计了PI 控制器控制汽车的启动转矩,使得电动机的输出转矩符合动力性能要求;文献[12]采用基于电压的控制方法实现直流电动机的PID调速控制;文献[13]基于对电动机转速输入指令与转速反馈信息的差值,进行PID闭环转速控制,并根据汽车运动状态,采用滑模变结构控制器对电动轮汽车动力学特性进行控制.综上所述,目前对电动机驱动系统采用的滑模控制具有较强的鲁棒性和较好的响应品质,而PID 控制结构简单、响应快速,易于实现.笔者基于滑模变结构理论,研究电动轮汽车驱动系统滑模变结构控制律,并综合滑模控制和PID控制的优点,设计驱动系统外环滑模-PID决策控制器以提高系统的鲁棒性和快速实现性能,并设计内环PID跟踪控制器以提高系统的跟踪性能,通过内、外环控制的有效结合,有效抑制系统响应超调和抖振现象,提高控制系统的品质.1 数学建模1.1 整车动力学模型将整车动力学模型简化成单轮车辆模型,并忽略空气阻力的影响,得到单轮车辆模型受力关系:式中:Jv为车轮转动惯量;ωv为电动车车轮转速;Fx为汽车的驱动力;r为车轮半径;Td为驱动转矩(电动机负载转矩);Tf为滚动阻力矩;Tb为汽车制动力矩.电动汽车的一般行驶方程为式中:为汽车总质量,g为重力加速度,f为滚动阻力系数,η为传动效率,i0为主减速比,ig为变速器传动比;Tw为空气阻力矩,Tw=,CD为空气阻力系数,A为迎风面积,ua为汽车的行驶速度;Ti为坡度阻力矩,Ti=mg×为路面坡度,为计算方便假设α=0;Tj为加速阻力矩为质量换算系数.电动汽车在行驶过程中,汽车的行驶车速与电动机转速之间的关系为式中n为电动机转速.1.2 轮毂电动机模型该电动机驱动系统采用永磁无刷直流轮毂电动机,无刷直流电动机的电压平衡方程式为式中:uA,uB,uC 为三相定子电压;eA,eB,eC 为三相定子反电动势;LAB,LBC,LAC,LBA,LBC,LCA,LCB为三相定子间的互感;RS为定子电阻;LA,LB,LC为三相定子自感;P为微分算子.由电动机的结构假设如下:式中LM为定子绕组间的互感.由式(4),(5)可得式(6)等价为电磁转矩方程为式中:TE为电磁转矩;ω为转子角速度.转子的运动方程为式中:Bf为黏滞阻尼系数;J为转子转动惯量.2 控制策略2.1 滑模控制律滑模变结构控制是基于控制率和变换结构在滑模面上的不连续性,迫使系统按照一定的到达条件进行滑模运动.由于滑模面一般固定,并且滑模运动的特性是预先设定的,因此,系统对于参数的变化和扰动受到的影响较小,具有很好的鲁棒性[14].滑模变结构控制的设计思路是先设计切换函数s,然后根据滑模存在性、可达性条件、系统正常运行段的动态品质要求和滑模运行段的动、静态特性要求,设计出滑模控制律,最终获得理想的滑模控制器,使运动平滑地到达滑模面.设运动对象的状态方程为式中:A,B,C为常向量;H为扰动量.定义切换函数为式中:K=(k1,k2,…,kn);kj为常数,j=1,2,…,n;xj=x(j-1)为系统状态及各阶导数.当s=0时,˙s=K(AX+BU+H)=0,即满足到达滑模面的理想滑动条件.对式(11)求导可得令滑模趋近律为将式(10)-(12)代入式(13)得即由式(15)可知滑模控制律由常行向量K决定,通过调节这些参数来调整滑模运动的品质.验证李雅普诺夫函数稳定性:式中V为李雅普诺夫函数稳定性函数.对式(16)两边求导得2.2 控制器设计分别设计电动轮汽车驱动系统外环滑模-PID决策控制器以及内环PID跟踪控制器,具体控制框图如图1所示.图1 控制框图2.2.1 外环决策控制器设计外环控制采用基于PID结构的滑模趋近律来设计控制器,直接对转速进行控制调节.设外环控制变量e=ωd-ωv,式中:ωd为参考转速;ωv为实际转速.且有式中λp=0.165为最佳滑移率.令 s=ke,则定义PID趋近律:联系式(1),(18),(20)得滑模控制律为由式(21)可知,通过调整k参数,kp,kd的值可以使滑模控制结果达到理想值.为消除系统各种不确定的干扰,满足式(13),需加入调整力矩Tlb,使运动轨迹快速达到切换面s=0.取为使系统满足滑模到达条件:将式(21),(22)代入式(23)可得则控制律为滑模变结构控制系统最大缺点就是滑模切换时会出现高频抖动的现象.原因有很多,例如由于系统惯性的存在而导致作用力滞后、系统建模时忽略了部分力等.采用积分函数饱和度函数sat替代常规滑模控制器中的开关函数,使变量连续达到滑模面,则可以有效地减小系统的抖动程度[15].因此,实际控制律变为式中:ki为积分常数;ε为边界层厚度,且ε>0.2.2.2 内环跟踪控制器设计内环控制采用PID对电动机电磁转矩进行调节.电动机转子角速度ω与转速n之间的关系为将式(22)代入式(4)可得式中:K1=BJπ/30;K2=π/30.因此,电动机的PID控制器为式中:KP,KI,KD为PID控制器的调节参数;G为滑模-PID的控制结果.3 控制结果仿真分析为验证滑模-PID控制算法的可行性,利用matlab/simulink建立汽车动力学仿真模型和电动机模型,并对基于滑模-PID控制器的控制系统进行仿真,仿真过程用到的参数:整车质量m=1 200 kg,车轮转动惯量Jv=3 kg·m2,车轮半径r=0.3 m,摩擦系数f=0.02,传动效率η=0.88,主减速比i0=1,变速器传动比ig=1,黏滞阻尼系数Bf=5.3,转子的转动惯量J=0.013 kg·m2.仿真结果如图2-5所示.仿真分析对比了外环控制分别采用传统PID方法和滑模-PID控制方法的性能.基于2种控制方法得到的电动机转速响应曲线如图2所示,电动机开始启动时由于负载较大,电动机转速在0~0.1 s时间段由较低转速快速增加,在0.2 s左右趋于稳定,相比于传统PID控制,滑模-PID控制使电动机转速振荡较小,响应快速且趋于稳定的时间较短.图2 电动机转速仿真结果对比电动机的电磁转矩仿真结果如图3所示,传统PID控制方法中电动机电磁转矩响应较慢,并且随着转速的变化而发生振荡,而滑模-PID控制的响应曲线在开始的0.1 s内电动机启动转矩较大,有利于电动机的快速启动,当系统在0.2 s时逐渐趋于稳定,电动机的电磁转矩维持在28 N·m左右.图3 无刷直流电动机电磁转矩的仿真结果电动轮汽车的车速和驱动转矩仿真结果如图4,5所示,相比传统PID控制,滑模-PID控制下的车速和驱动转矩响应更快,几乎消除了系统超调量,且很快趋于稳定.以滑模-PID控制为例,在0~0.1 s时间段,电动机转速不稳定,起始车速比较低,但增加比较快,系统响应比较迅速.随着车速的增加,电动汽车的驱动转矩增大.在0.2 s左右,电动机的转速趋于稳定,汽车车速稳定在21 m·s-1左右,此时,电动汽车的驱动转矩稳定在8 N·m左右,此后,电动汽车将维持此车速和转矩保持等速直线行驶.因此,电动机系统及电动汽车整车系统将保持稳定.图4 车速仿真结果对比图5 电动汽车驱动转矩的仿真结果4 结论建立了电动轮汽车动力学模型和轮毂电动机驱动模型.以滑模控制理论为基础,综合PID控制的优点,设计了系统外环滑模-PID决策控制器及内环PID跟踪控制器,通过内外环控制的有效结合,使系统兼顾滑模变结构控制稳定性好、鲁棒性高和PID控制简单易实现的特点,提高系统的控制品质.仿真结果表明应用滑模-PID控制的驱动系统可以获得较为理想的汽车动力学特性和电动机特性.参考文献(References)【相关文献】[1]Kim W,Yi K,Lee J.An optimal traction,braking,and steering coordination strategy for stability and manoeuvrability of a six-wheel drive and six-wheel steer vehicle [J].Journal of Automobile Engineering,2012,226:3-22.[2]Gu J,Ouyang M,Lu D,et al.Energy efficiency optimization of electric vehicle driven by in-wheel motors[J].International Journal of Automotive Technology,2013,14(5):763-772.[3]Zhang Guirong,Zhang Henghai,Li Houyu.The driving control of pure electric vehicle [J].Procedia Environmental Sciences,2011,10:433-438.[4]冯冲,丁能根,何勇灵.汽车ABS与AFS集成控制算法[J].江苏大学学报:自然科学版,2013,34(2):138-143.Feng Chong,Ding Nenggen,He Yongling.Integrated control algorithm of ABS and AFS for automobile[J].Journal of Jiangsu University:Natural Science Edition,2013,34(2):138-143.(in Chinese)[5]He Zhengyi,Ou Yang,Yuan Jingming.Research on the torque dynamic distribution algorithm of in-wheel-motor electric vehicle[C]∥Proceedings of the FISITA 2012 WorldAutomotiveCongress. Heidelberg,Germany:Springer,2013:257-266.[6]Zhao Wanzhong,Xu Xiaohong,Wang Chunyan.Multidiscipline collaborative optimization ofdifferential steering system of electric vehicle with motorized wheels [J].Science China Technological Sciences,2012,55(12):3462-3468.[7]刘峰.轮毂驱动电动汽车整体设计与研究[D].武汉:武汉理工大学汽车工程学院,2011. [8]Wu Fengkuang,Yeh T J,Huang Chunfeng.Motor control and torque coordination of an electric vehicle actuated by two in-wheel motors[J].Mechatronics,2013,23:46-60.[9]卢东斌,欧阳明高,谷靖,等.四轮驱动电动汽车永磁无刷轮毂电机转矩分配[J].清华大学学报:自然科学版,2012,52(4):451-456.Lu Dongbin,Ouyang Minggao,Gu Jing,et al.Torque distribution algorithm for a permanent brushless DC motor for four wheel drive electric vehicles[J].J Tsinghua University:Science and Technology,2012,52(4):451-456.(in Chinese)[10]Wang Rongrong,Chen Yan,Feng Daiwei,et al.Development and performance characterization of an electric ground vehicle with independently actuated in-wheel motors[J].Journal of Power Sources,2011,196(8):3962-3971.[11]Li Jianbin,Liang Xinlu,Yue Weiqiang.The vehicle dynamic parameters recognition of in-wheel motor driven electric vehicle[J].Procedia Engineering,2011,15:443-447. [12]夏长亮,刘均华,俞卫,等.基于扩张状态观测器的永磁无刷直流电机滑模变结构控制[J].中国电机工程学报,2006,26(20):139-143.Xia Changliang,Liu Junhua,Yu Wei,et al.Variable structure control of BLDCM based on extended state observer[J].Proceedings of the CSEE,2006,26(20):139-143.(in Chinese) [13]Yang Y P,Lo C P.Current distribution control of dual directly driven wheel motors for electric vehicles[J].Control Engineering Practice,2008,16(11):1285-1292.[14]刘金琨.滑模变结构控制MATLAB仿真[M].北京:清华大学出版社,2005.[15]Ghani N M,Sam Y M.Sliding mode control of active car steering with various boundary laver thickness and disturbance[C]∥2007 Second IEEE Conference on Industrial Electronics and Applications.Piscataway,USA:IEEE,2007:2494-2499.。
电动轮驱动的电动汽车动力学仿真

1 Sho eie u a n esyo Tcnl y 2 Sho A tm t n . colfVh l,W h nU iri ehoo ; . col o c v tf g f o uo ai ,Wua nvrt Tcn l y u a 4 0 7 o h n U i syo eh o ,W h n 30 0 ei f o g
lcr e il t mo o —n— e ld e i o du td.Ther s t ho t a i h i e ul s w h t s s e d c a g n d se rn fa4W D e e t c v h ce wi tr i wh e rv sc n ce p e h n i g a te g o n i
明 守政 田 浩 ,
( .武汉理工大 学汽车 学院; 2 1 .武汉理工大 学 自动化 学院 , 武汉
【 摘要] 采用自然坐标系下的整车动力学模型 , 模拟变速或转向过程中可能存在的变化情况, 进行了四电动
轮独立驱 动的电动汽车仿真 。仿真试验 表明 , 变速 或转 向的过程 中, 在 各轮的输出转矩可能会有 较大差异 。因此在 此类 电动汽车 的设计 中应 当充 分考 虑对变速或转 向时 各轮的转 矩加 以控制 , 以提高操控性能 。
.
d r gtepoesso edca gn n er g teo tu ru f iee t h esm yhv u s ni i u n rcs f pe h i ga ds e n , h up toq eo f rn w el a aes bt t l s i h e s n ti t df a ad —
轮毂电机客车驱动系统设计及性能比较

轮毂电机客车驱动系统设计及性能比较摘要:轮毂电机驱动电动汽车动力传输效率高、污染小、控制灵活,尤其可以实现对单个车轮的独立控制,因此具有明显的驱动控制优势。
然而,相对传统的动力中置电动汽车而言,轮毂电机省去了机械传动系统,电机更加靠近振动源,使其运行条件更加恶劣,同时电机在运行过程中还存在各类不确定性扰动,如路面的随机扰动和自身电磁激励。
工程上采用传统比例积分微分控制方法抑制不确定性扰动,虽然实现简单,但始终存在转速超调与快速跟踪之间的矛盾,在复杂扰动条件下跟踪精度不高,制约了车辆动力性能的提升。
本文主要分析轮毂电机客车驱动系统设计及性能比较。
关键词:电机客车;驱动系统;轮毂电机;轮边电机引言轮毂电机驱动系统具有可独立控制、响应快和效率高等优点,已成为电动汽车动力系统的一个重要发展趋势。
本文以某型纯电动样车为原型,设计其轮毂电机驱动系统,解析其差速控制策略,然后采用Cruise软件进行仿真分析,比较轮毂、轮边和直驱三种构型的动力性和经济性。
1、整车驱动控制策略VCU发出运行指令后,PCM通过CAN读取挡位状态,当挡位状态为D或者R挡,驾驶员踩下AP时,与AP硬线连接的PCM会根据预存的整车动力学模型计算得到一个基本的整车扭矩需求值,然后根据不同的工况将扭矩需求分配给左右轮毂电机控制器,再控制轮毂输出对应扭矩完成驱动控制。
主要的三种控制策略如下:1)良好路面直线行驶。
PCM根据SAS的转向角度输出信号,判定转向角度为0,此时两个轮毂电机扭矩各按整车扭矩需求值的一半分配。
2)转向过程中的差速控制。
PCM根据SAS的转向角度输出信号,判定转向角度不为0,此时根据预存的整车动力学模型计算两个轮毂电机的扭矩分配值。
即转向过程中全部车轮围绕一个瞬时中心点做圆周滚动,这就是轮毂电机驱动系统广义上的差速控制过程。
3)实时的道路状态识别。
PCM实时获取ABS或EBS发送的转速信号,通过与车速的比较运算得到滑移率参数,进而对两轮的驱动扭矩进行实时修正,从而形成差速闭环控制。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
学模 型。以直 流电机等效 电路为基础 建立 电机数 学模 型 , 采 用普 遍参 考 的统一 半经 验指 数建立 轮胎 模 型。使用 M A T L A B软件进行动态仿 真 , 得 出电机转 矩和 轮胎侧 向力 、 纵 向力 曲线 , 仿 真结果 表 明模 型正
s h o w t h a t t h e ma t h e ma t i c a l mo d e l s a r e c o r r e c t a n d t h e mo d e l s a r e c o n s i s t e n t wi t h t h e t h e o r e t i c a l
wh e e l d iv r e n e l e c t ic r v e h i c l e,a nd t h e ma t h e ma t i c a l mo d e l s o f mo t o r a nd t y r e a r e e s t a b l i s h e d . Th e mo t o r mo d e l i s b u i l t b a s e d o n DC mo t o r e q u i v le a n t c i r c u i t a n d t h e ma t h e ma t i c mo d e l o f t h e t y r e i s a s e mi—e mpi ic r a l mo de 1 .Dy n a mi c s i mu l a t i o n i s p e r f o r me d b y MATLAB a n d t h e c ur v e s o f mo t o r t o r q u e,t i r e l a t e r a l f o r c e a nd t y r e l o n g i t u d i n a l f o r c e a r e o b t a i ne d.Th e s i mu l a t i o n r e s ul t s
第1 7卷
第3 期
大 连 民 族 学 院 学 报
J o u r n a l o f Da l i a n Na t i o n a l i t i e s U n i v e r s i t y
Vo 1 .1 7, No . 3 Ma v 2 01 5
2 0 1 5年 5月
S ONG P e n g , B O C h u n— j u a n, X U G u o— k a i , Z H ANG T a o
( C o l l e g e o f E t e c t r o m e c h a n i c a l &I n f o r m a t i o n E n g i n e e r i n g , D l a i a n N a t i o n a l i t i e s U n i v e r s i t y , D a l i a n L i a o n i n g 1 1 6 6 0 5, C h i n a )
汽车 由于其 运 动控 制 、 结 构 布 置等 方 面 的优势 , 成 为 电动 汽车研 究 热点 。
排放 , 在行 驶过 程 中没 有污 染 , 热 辐射 低 , 噪音 小 , 因而受 到 广 泛 的欢 迎 。 目前 , 大汽 车 驱 动 系统
确, 与理论分析相符 。
中 图分 类 号 : U4 6 9. 7 2
‘
文献标志码 : A
‘
关键 词 : 轮式驱动 电动汽 车 ; 电机 ; 轮胎 ; 仿 真
S i mu l a t i o n o f Wh e e l Dr i v e n El e c t r i c Ve h i c l e Dr iv i n g S y s t e m
文章编号 : 1 0 0 9—3 1 5 X( 2 0 1 5 ) 0 3— 0 2 2 8— 0 3
轮 式驱 动 电动 汽 车 驱 动 系统 仿 真
宋 鹏, 薄纯娟 , 徐 国凯 , 张 涛
( 大连 民族 学 院 机 电信息 . T - 程学院, 辽 宁 大连 1 1 6 6 0 5 )
a n a l y s i s .
K e y wo r d s : w h e e l d i r v e n e l e c t i r c v e h i c l e ;m o t o r ;t y r e i s i m u l a t i o n
日益严 重 的环 境 问题 和能 源 危机 使 百 年交 通 工 具— — 汽车 面 临着越 来越 严 峻 的考 验 。电动 汽 车 以电力 为 主要 动 力 , 它 可 以实 现 零 排 放 或 极 低
Ab s t r a c t : T a k i n g w h e e l d i r v e n e l e c t i r c v e h i c l e a s r e s e a r c h o b j e c t , w e f o c u s o n d i r v i n g s y s t e m o f
轮式 驱 动 电动汽 车驱 动 系统 是 一个 全 新 的 驱