测量小车基础数据库数据格式定义
车载导航地图格式
车载导航地图格式车载娱乐系统最重要的一个功能就是导航,而地图数据则是导航的基础,下面就介绍一下车载导航地图数据的格式。
一、地图数据格式分类按照地图的数字化,到中间转换和最后被使用这几个层次,将地图数据分为以下几类:1.母库格式:地图的数字化,即是将实物进行数字化,然后进行存储,母库格式一般以ASCLL码来进行存储,主要是方便于编辑和保存,如TAB格式数字化又可分为:路网数字化、POI数字化、文字河流湖数字化和桥梁建筑的数字化等,例如路--->link,简单路口--->node,复杂路口--->ComplexIntersection等2.交换格式:数据转化,即是将母库格式转变成各种其他格式,一般都是公开格式,也是以ASCLL码进行存储,方便进行转换应用,如 MIF格式\SHP格式\GDF格式\图商交换格式(四维图新:NIMIF格式,高德:AXF格式,瑞图:RTM格式)\RDF格式3.应用格式(也叫物理格式/存储格式):数据的使用,以二进制的方式存储,主要是方便计算机(软件)能够高效统一的使用数据,如 KIWI格式\SDAL\NDS其实我们平时说的车载导航的地图数据格式是指应用格式。
而母库格式和交换格式则主要是用来修改和存储数据。
二、地图编译地图的编译其实就是格式转换的过程。
为了对现实世界尽可能完整准确地体现,图商收集和制作的地图数据(母库格式)往往是非常充实但又繁琐复杂的,而对于储存空间和处理能力有限的汽车车机来说,这些内容是无法直接照单全收的。
同时,不同的图商提供的地图数据往往都基于不同的储存格式(交换格式),有时候还需要加入来自于第三方的补充内容,而不同导航软件对其导航功能的设计也千差万别。
所以,为了适配相应的导航软件,原始的地图数据需要经过地图编译这个环节才能最终被导航使用。
在这个过程中,原始的地图数据和其他的补充内容会经过重新组织,去除冗余,并按照不同的需求压缩成各种储存格式(应用格式),以适应不同平台不同客户的装载使用要求。
测绘数据格式要求

测绘数据要求测绘数据包含矢量数据和影像图,其中矢量数据必须有,影像图针对具体工作方式而定。
一、矢量数据:包含县、镇、村界和以村为单位的地块信息,格式均为shape数据。
必须要有的字段按顺序增加:GISID varchar(10),GISAREA demacal(10,2),ORGCODE varchar(15),FARMER varchar(20),FARMERCODE varchar(20),LANDTABLE varchar(20),LAYER varchar(10)各字段针对不同数据的要求:县界必填项:ORGCODE——内容为对应的县区级组织机构代码,按规定的6位数表示,FARMER——填写县名,LAYER——内容为“xian”,其他字段属性为空。
镇界必填项:ORGCODE——内容为对应的乡镇级组织机构代码,按规定的9位数表示,FARMER——填写乡镇名,LAYER——内容为“town”,其他字段属性为空,同一县区的所有乡镇界限放在同一个SHAPE文件里。
村界必填项:ORGCODE——内容为对应的行政村的组织机构代码,按规定的12位数表示,FARMER——填写村名,LAYER——内容为“village”,其他字段属性为空,同一县区的所有村界放在同一个SHAPE文件里。
地块信息必填项:GISID——内容为四位地块顺序码,该顺序码与往系统导入的合同模板的地块编码一一对应且同一小组内数据不重复;GISAREA——内容为地块实测面积;ORGCODE ——假如该村分小组,则填写14位的小组代码,假如该村不分小组,则填写12位的村级代码;FARMER——内容为农户姓名;FARMERCODE——按农业部要求的17位农户代码,与导入的农户表代码一致;LAYER——内容统一为“land”。
LANDTABLE内容为空。
注:地块信息的矢量数据,GISID、ORGCODE、GISAREA、LAYER的内容必须填写,其他内容选填。
GPS数据格式

GPS数据格式a.GPS固定数据输出语句($GPGGA)这是一帧GPS定位的主要数据,也是使用最广的数据。
$GPGGA 语句包括17个字段:语句标识头,世界时间,纬度,纬度半球,经度,经度半球,定位质量指示,使用卫星数量,水平精确度,海拔高度,高度单位,大地水准面高度,高度单位,差分GPS数据期限,差分参考基站标号,校验和结束标记(用回车符<CR>和换行符<LF>),分别用14个逗号进行分隔。
该数据帧的结构及各字段释义如下:$GPGGA,<1>,<2>,<3>,<4>,<5>,<6>,<7>,<8>,<9>,M,<10>,M,<11>,<12>*xx<CR>< LF>$GPGGA:起始引导符及语句格式说明(本句为GPS定位数据);<1> UTC时间,格式为hhmmss.sss;<2> 纬度,格式为ddmm.mmmm(第一位是零也将传送);<3> 纬度半球,N或S(北纬或南纬)<4> 经度,格式为dddmm.mmmm(第一位零也将传送);<5> 经度半球,E或W(东经或西经)<6> 定位质量指示,0=定位无效,1=定位有效;<7> 使用卫星数量,从00到12(第一个零也将传送)<8> 水平精确度,0.5到99.9<9> 天线离海平面的高度,-9999.9到9999.9米M 指单位米<10> 大地水准面高度,-9999.9到9999.9米M 指单位米<11> 差分GPS数据期限(RTCM SC-104),最后设立RTCM传送的秒数量<12> 差分参考基站标号,从0000到1023(首位0也将传送)。
GPS测量应用中常用数据格式

第九章GPS测量应用中常用数据格式§9.1 RINEX 格式9.1. 1 概述GPS数据处理时所采用的观测数据来自进行野外观的GPS接收机。
接收机在野外进行观测时,通常将所采集的数据记录在接收机的内部存储器或可移动的存储介质中。
在完成观测后,需要将数据传输到计算机中,以便进行处理分析。
这一过程通常是利用GPS接收机厂商所提供的数据传输软件来进行。
传输到计算机中的数据一般采用GPS接收机厂商所定义的专有格式以二进制文件的形式进行存储。
一般说来,不同GPS接收机厂商所定义的专有格式各不相同,有时甚至同一厂商不同型号仪器的专有格式也不相同。
专有格式具有存储效率高,各类信息齐全的特点,但在某些情况下,如在一个项目中采用了不同接收机进行观测时,却不方便进行数据处理分析,因为数据处理分析软件能够识别的格式是有限的。
RINEX(Receiver Independent Exchange Format/与接收机无关的交换格式)是一种在GPS 测量应用中普遍采用的标准数据格式。
该格式采用文本文件形式存储数据,数据记录格式与接收机的制造厂商和具体型号无关。
RINEX格式由伯尔尼大学天文学院的Werner Curtner 于1989年提出。
当时提出该数据格式是为了能够综合处理在EUREF89(欧洲一项大规模的GPS联测项目)中所采集的GPS 数据。
该项目采用了来自4个不同厂商共60多台GPS接收机。
现在,RINEX格式已经成为了GPS测量应用等的标准数据格式,几乎所有测量型GPS 接收机厂商都提供将其专有格式文件转换为RINEX格式文件的工具,而且几乎所有的数据分析处理软件都能够直接读取RINEX格式的数据。
这意味着在实际观测作业中可以采用不同厂商不同型号的接收机进行混合编队,而数据处理则可采用某一特定软件进行。
经过多年不断修订完善,目前应用最为普遍的是RENEX格式的第2版。
该版本能够用于包括静态和动态GPS测量在内的不同观测模式数据。
测绘技术中常用的数据格式和数据模型

测绘技术中常用的数据格式和数据模型测绘技术是一门应用广泛的学科,涉及到地理空间数据的处理、分析和展示。
在测绘过程中,数据格式和数据模型起着非常重要的作用,它们决定了数据的组织方式、存储方式以及在不同软件和硬件平台上的交换与共享。
本文将介绍测绘技术中常用的数据格式和数据模型。
一、数据格式数据格式是数据的物理表示形式,主要用于数据存储和传输。
常见的数据格式有如下几种:1. 二进制格式二进制格式是一种面向计算机的数据表示方式,通过0和1的组合来表示不同的数据类型。
二进制格式的数据存储和传输效率高,但对于人类阅读和理解不够友好。
在测绘技术中,二进制格式常用于地理空间数据库的存储和处理。
2. 文本格式文本格式是一种面向人类的数据表示方式,通过字符和符号的组合来表示不同的数据类型。
文本格式的数据可读性强,但存储和传输效率较低。
在测绘技术中,文本格式常用于地理数据的导入、导出和编辑。
3. 标准格式标准格式是一种通用的数据表示方式,通过事先定义的数据结构和规范来表示不同的数据类型。
标准格式的数据可读性好,而且易于在不同软件和硬件平台上进行交换和共享。
在测绘技术中,常用的标准格式有Shapefile、GeoJSON和KML等。
4. 图像格式图像格式是一种用于存储和传输图像数据的特殊数据格式。
在测绘技术中,常用的图像格式有JPEG、PNG和TIFF等。
图像格式的数据一般用于地图的展示和分析。
二、数据模型数据模型是一种表示现实世界和其中事物之间关系的抽象工具,它描述了数据的结构、属性和行为。
常见的数据模型有如下几种:1. 点模型点模型是最基本的数据模型,用于表示地理空间中的点要素。
它通过点的坐标来描述地理实体的位置,常用于测量和标注地理坐标点。
2. 线模型线模型用于表示地理空间中的线要素。
它通过连接点的方式来描述地理实体的形状和拓扑关系,常用于绘制道路和河流等线状要素。
3. 面模型面模型用于表示地理空间中的面要素。
它通过连接线的方式来描述地理实体的形状和空间关系,常用于绘制土地利用和地形等面状要素。
智能网联汽车数据格式与定义编制说明
《智能网联汽车数据格式与定义》编制说明一、工作简要过程1、任务来源《智能网联汽车数据格式与定义》团体标准由中国汽车工业协会批准立项,文件号中汽协函字【2021】095号,项目计划号2021-3。
2、编制背景与目标智能网联汽车的数据采集与回传是行业发展的必然趋势。
但目前,国内针对智能网联汽车采集的数据没有统一的格式要求。
秉着团标先行,按需制定,注重实用,服务产业的原则,中国汽车工业协会(以下简称“中汽协”)汽车大数据委员会牵头组织各会员企业共同研究智能网联汽车数据的格式与定义,并制定团体标准。
本标准立足于智能网联汽车数据采集与应用的需求,依据智能网联汽车各类车载传感器所能够采集到的数据来统一数据的格式。
本标准也应对了网信办的《汽车数据安全管理若干规定》中提到的脱敏原则以及保护个人隐私匿名化的要求,并以此给企业提供数据处理工作的引导,保证相关数据字段不会触碰国家安全、公共安全、个人隐私安全。
同时制定研究该团体标准是符合《国家车联网产业标准体系建设指南(智能网联汽车)》整体规划和产业发展需求的。
此标准有利于汽车产业在数据格式与定义上形成共识,并指导企业对汽车数据进行脱敏处理,促进汽车数据在企业间实现共享与交互,助力智能网联汽车数据生态的形成。
本标准的研究与制定也能够为各企业开发自动驾驶技术、优化车辆功能以及其他领域的商业应用提供有效支撑。
本标准发布后仍将持续迭代,适时修订,并为后期相关国家标准的制定奠定基础。
同时,中汽协也已经完成汽车大数据区块链平台(Vehicle Data Block chain Platform—VDBP)的开发与部署,各企业在VDBP上进行的数据交互将依据此标准执行。
3、主要工作过程:1)2020年7月17日中汽协汽车大数据委员会进行了内部梳理,研究了行业痛点,明确了企业需求。
确定了标准研制方向,工作组针对痛点需求和行业知识制定了汽车数据格式和定义的预研,确定基础格式与定义。
2)2021年2月5日中汽协汽车大数据委员会组织专家在上海完成了智能网联汽车数据格式与定义团体标准立项评审会,会议表决通过立项评审。
如何选择适用于测绘技术的数据格式

如何选择适用于测绘技术的数据格式1. 引言测绘技术在如今的社会发展中具有重要的地位和作用。
随着技术的进步和数据的不断增长,选择合适的数据格式成为了测绘工作者必须面对的一个重要问题。
本文将从数据格式的特点、测绘任务的需求以及技术发展等方面,探讨如何选择适用于测绘技术的数据格式。
2. 数据格式的特点数据格式是指数据在存储和传输过程中的组织方式和结构。
选择适用于测绘技术的数据格式时,首先需要了解数据格式的特点。
常见的数据格式有矢量格式和栅格格式。
2.1 矢量格式矢量格式以点、线、面等几何元素和其属性描述作为数据基本单位,可以精确表示空间对象的几何位置和属性信息。
矢量格式适合存储和处理具有明确空间关系和结构的数据,如道路、建筑等。
矢量格式具有数据量小、精度高、扩展性强等优点,但在表示连续现象时,由于需要较多的点和线,数据文件较大,处理速度慢。
2.2 栅格格式栅格格式以像元(像素)为数据单元,将空间划分为等大小的网格,用不同的像元值表示对象的属性。
栅格格式适合存储和处理连续分布、密度变化较大的数据,如高程、气候等。
栅格格式的数据存储和处理相对简单,但在表达几何位置和属性方面的精度较低。
3. 测绘任务的需求在选择适用于测绘技术的数据格式时,需要充分考虑实际测绘任务的需求。
不同的测绘任务对数据格式要求有所不同,如图像处理、地理信息系统分析、三维建模等。
3.1 图像处理图像处理是测绘技术中常见的任务之一,对于图像处理而言,栅格格式通常更加适合。
因为图像处理需要对像素进行操作,如图像增强、滤波等。
栅格格式的像元操作更加灵活,可直接对图像进行像素级别的处理。
3.2 地理信息系统分析地理信息系统(GIS)分析主要是对空间数据进行处理和分析,用于解决一定范围内的地理问题。
GIS分析一般需要矢量数据格式,因为矢量数据具备几何位置和属性信息,更适合表达空间关系和结构。
3.3 三维建模三维建模是测绘技术中的一项重要任务,对于三维建模需要精确的空间位置和属性信息。
测绘技术中的地理信息系统数据格式解析

测绘技术中的地理信息系统数据格式解析地理信息系统(Geographic Information System,简称GIS)是一种通过空间分析和数据管理来捕捉、存储、检索、分析和显示地理信息的技术系统。
而在GIS系统中,数据扮演着至关重要的角色。
数据的格式对于GIS系统的使用和信息的提取具有关键性的影响。
因此,地理信息系统数据格式解析是我们探讨的重要话题。
一、数据格式与数据类型在地理信息系统中,数据格式可以理解为数据存储和组织的方式,是数据存储在计算机中的物理表达形式。
而数据类型则指的是数据所代表的事物的属性。
常见的数据格式包括:矢量数据格式、栅格数据格式和CAD数据格式。
1. 矢量数据格式矢量数据格式是以点、线和面等几何元素来表示现实世界中的对象和现象的一种数据表达方式。
常见的矢量数据格式包括Shapefile、KML和GeoJSON等。
其中,Shapefile是最常用的矢量数据格式之一,它由一组文件组成,包括.shp、.shx和.dbf等多个文件,分别用于存储几何数据、索引信息和属性数据。
2. 栅格数据格式栅格数据格式是以网格或像元的形式来表示现实世界中的地理现象和属性的一种数据表达方式。
栅格数据格式适用于对地理现象进行描述和分析的领域,如地形分析、地貌分析等。
常见的栅格数据格式包括GeoTIFF、GRID和ERDAS等。
GeoTIFF是最常用的栅格数据格式之一,它可以存储光谱、多光谱和高光谱等信息,具有较高的数据精度和灵活性。
3. CAD数据格式CAD数据格式是计算机辅助设计(Computer-Aided Design)中常用的数据格式之一,用于存储和表示二维和三维几何对象和属性数据。
CAD数据格式通常以DWG或DXF为扩展名,可以在CAD软件中进行编辑和分析。
CAD数据格式在建筑、土木工程和机械设计等领域有着广泛的应用。
二、数据格式解析的意义与技术挑战地理信息系统数据格式解析对于GIS系统的使用和地理信息的提取至关重要。
测绘技术中的数据标准与规范

测绘技术中的数据标准与规范导言在现代社会中,测绘技术的应用范围越来越广泛。
测绘技术的发展和应用离不开数据的支持。
为了确保数据的可靠性和一致性,数据标准和规范在测绘技术中起着重要的作用。
本文将探讨测绘技术中的数据标准与规范,以及其对现代测绘工作的影响和意义。
一、数据标准和规范的定义与重要性测绘技术中的数据标准和规范指的是对测绘数据进行描述、记录和交换时所遵循的标准和规范。
数据标准是指对数据格式、命名规则、属性定义等方面进行统一规范的要求。
规范则是对测绘数据的采集、处理、存储和传输过程中定下的行之有效的规定。
数据标准和规范在测绘技术中具有重要的意义。
首先,它们可以确保测绘数据的质量。
通过统一的数据标准和规范,可以降低数据错误和不一致性的发生概率,提高数据的准确性和稳定性。
其次,数据标准和规范可以促进数据的交流和共享。
只有当不同单位之间使用相同的数据标准和规范时,才能实现数据的无缝对接和共享,提高资源的利用效率。
再次,它们为测绘技术的发展提供了基础。
通过统一的数据标准和规范,可以推动测绘技术的研究和应用,促进行业的进步和发展。
二、测绘数据标准和规范的具体内容1. 数据格式标准在测绘技术中,数据格式标准是指将测绘数据按照一定的格式和结构进行编码和存储的规范。
常见的数据格式标准包括DXF、DWG、GML等。
这些标准要求数据在存储和交换过程中具有一定的结构和编码方式,以确保数据的完整性和可读性。
2. 数据质量标准数据质量标准是指评价和判断测绘数据质量的一系列准则和要求。
数据质量标准通常包括数据准确性、数据精度、数据一致性等方面的要求。
这些标准对于保证测绘数据的可靠性和可信度至关重要,也是测绘数据应用的基础。
3. 数据命名规范数据命名规范是指为测绘数据、图层、属性等进行命名时所遵循的规范和约定。
良好的数据命名规范可以提高数据的可管理性和可搜索性,减少数据命名冲突和混乱的概率。
同时,数据命名规范还能够提高数据的查找和使用效率,提高工作效率。
轿车数据库课程设计思路

轿车数据库课程设计思路一、教学目标本课程旨在通过轿车数据库的学习,让学生掌握数据库的基本概念、设计方法和应用技巧。
在知识目标方面,希望学生能够理解数据库的基本原理,熟悉数据库的设计流程,掌握SQL语言及其应用。
在技能目标方面,希望学生能够运用数据库设计方法,独立完成一个小型轿车数据库的设计和实现。
在情感态度价值观目标方面,希望学生能够认识到数据库技术在现代社会的重要性,培养对数据库技术的兴趣和热情。
二、教学内容本课程的教学内容主要包括轿车数据库的基本概念、设计方法和应用技巧。
首先,将介绍数据库的基本概念,包括数据库、数据库管理系统、数据库设计等。
然后,将介绍数据库的设计方法,包括需求分析、概念设计、逻辑设计和物理设计。
接着,将介绍SQL语言的基本操作,包括数据定义、数据操纵和数据查询。
最后,将通过实例讲解轿车数据库的设计和实现过程。
三、教学方法为了提高学生的学习兴趣和主动性,将采用多种教学方法相结合的方式进行教学。
将采用讲授法讲解基本概念和设计方法,通过案例分析法分析实际问题,通过实验法让学生动手实践。
同时,也将鼓励学生进行讨论和交流,以提高他们的思考和解决问题的能力。
四、教学资源为了支持教学内容和教学方法的实施,将选择和准备适当的教学资源。
教材方面,将选择《数据库原理与应用》作为主教材,辅以《SQL Server实用教程》作为实验教材。
参考书方面,将推荐《数据库系统概念》和《数据库系统实现》等书籍。
多媒体资料方面,将制作PPT和视频教程,以丰富学生的学习体验。
实验设备方面,将准备计算机和数据库服务器,以供学生进行实验和实践。
五、教学评估本课程的评估方式将包括平时表现、作业和考试三个部分。
平时表现主要评估学生在课堂上的参与度和讨论表现,将采用课堂提问、小组讨论等方式进行。
作业主要评估学生的实践能力,将布置SQL练习和数据库设计案例,要求学生在规定时间内完成。
考试主要评估学生的综合能力,将包括选择题、填空题和问答题,内容涵盖课程的所有知识点。
三坐标转换成汽车通用语言aqdef格式

三坐标转换成汽车通用语言aqdef格式随着汽车行业的快速发展,汽车设计和生产的需求也在不断增加。
为了满足这一需求,三坐标测量技术应运而生。
三坐标测量技术是一种高精度的测量技术,可以对汽车零部件的形状和尺寸进行全方位的测量和分析。
而为了实现不同设备的通用,汽车行业采用了通用语言aqdef格式来统一三坐标测量数据的输出和传输。
在这篇文章中,我将深入探讨三坐标转换成汽车通用语言aqdef格式的过程和意义,以便读者能更全面、深刻地理解这一主题。
1. 三坐标测量技术的基本原理三坐标测量技术是一种通过测量汽车零部件表面上点的坐标,然后根据这些点的坐标计算零件的形状和尺寸的测量技术。
这种技术通过探头在三维空间中的移动,可以实现对不同形状和尺寸的汽车零部件进行精确测量。
通过这种方式,汽车制造商可以确保零部件的质量和精度,从而提高汽车的整体质量和性能。
2. 三坐标转换成汽车通用语言aqdef格式的意义在实际的生产过程中,不同的三坐标测量设备可能采用不同的数据格式,这就给数据的输出和传输带来了困难。
为了解决这一问题,汽车行业制定了通用语言aqdef格式,使不同设备之间可以实现数据的通用性和互操作性。
这样一来,不仅可以简化数据处理的流程,还可以提高生产效率和降低成本。
3. 三坐标转换成汽车通用语言aqdef格式的过程在实际的三坐标测量过程中,首先需要对汽车零部件进行测量,并获取到一系列的数据点。
这些数据点需要经过处理和计算,最终转换成符合aqdef格式的数据。
这个过程涉及到坐标的转换、数据格式的调整等多个环节。
只有经过严格的处理和计算,才能确保最终的数据符合aqdef格式的要求。
4. 个人观点和理解作为汽车行业的从业者,我认为三坐标转换成汽车通用语言aqdef格式是非常重要的。
这不仅可以帮助企业提高生产效率,还可以提升产品的质量和竞争力。
这也对技术人员的要求提高了,需要具备丰富的三坐标测量经验和对aqdef格式的熟悉程度。
dbc的格式 -回复
dbc的格式-回复什么是DBC格式,以及它的应用领域?DBC格式,全称为Database Container File,是用于描述CAN网络通信的一种文件格式。
CAN(Controller Area Network)是一种常用于汽车和工业控制领域的网络通信协议。
DBC格式通过定义CAN消息、信号和节点的属性,来描述和管理CAN网络中传输的数据。
DBC格式最初由Vector Informatik公司在其CANalyzer软件中引入,并逐渐成为CAN网络通信工程师之间交流的标准格式。
DBC文件被广泛应用于汽车行业中的电子控制单元(ECU)开发、测试和故障诊断等方面,同时也在其他工业控制领域中被使用。
在CAN网络通信中,每个CAN消息都包含多个信号,而每个信号则代表了一个具体的数据传输项。
DBC格式通过定义CAN消息的ID、周期、长度等信息,以及信号的名称、长度、数据类型、因子等属性,来描述CAN 网络中传输的数据。
这些信息可以帮助工程师进行数据解析和诊断,以确保CAN网络的正确运行。
使用DBC格式进行CAN网络通信的开发具有许多优势。
首先,DBC文件提供了一种简洁、结构化的描述方式,使得工程师能够清晰地了解CAN 网络中的数据流。
其次,DBC文件具有良好的可读性和可维护性,工程师可以根据需求进行修改和扩展。
此外,DBC文件还允许在开发过程中进行模拟和仿真,提高了开发效率和可靠性。
使用DBC格式进行CAN网络通信开发的步骤如下:1. 创建DBC文件:首先,需创建一个空白的DBC文件。
一般情况下,工程师可以使用DBC编辑器软件,如Vector CANalyzer或CANoe等,进行创建和编辑。
2. 定义CAN节点:在DBC文件中,需要定义参与CAN网络通信的所有节点。
节点通常表示一个ECU或设备,可以包括车辆传感器、控制单元、显示屏等。
3. 定义CAN消息:为每个节点定义CAN消息,包括消息的ID、周期、长度等信息。
dbc 参数

dbc 参数DBC参数在车联网系统中扮演着重要的角色,它是驾驶辅助系统中的一个重要组成部分,能够提高车辆的智能化水平。
下面就来详细介绍一下DBC参数。
一、什么是DBC参数?DBC全称为Database CAN描述文件,简单来说就是汽车通信网络中的一个数据格式规范。
它由后面的CAN描述语言(CAN Data Link Layer)加上LIN描述语言(LIN Data Link Layer)组成。
为了能够让车联网中的通信数据能够标准化,就需要一个统一的数据格式,这就是DBC参数。
二、DBC参数的作用1、提高数据的可读性和可编写性DBC参数可以将车联网中的数据进行标准化,让不同的工程师都能够理解并编写数据。
同时,DBC参数可以将数据进行分类,让数据的来源和目的都能够得到清晰地呈现,这样就能够提高数据的可读性和可编写性。
2、提供丰富的数据信息DBC参数不仅可以提供车的速度、油量等基本信息,还能够提供更为丰富的信息,比如车的倾斜角度、动力输出等数据信息。
这些数据都可以通过DBC参数来进行实时监测和分析,为车的驾驶者提供更为准确和准确的信息。
3、提高车辆的智能化水平DBC参数提供的数据可以被用来驾驶辅助系统中,通过算法进行智能化处理,比如自动驾驶、自动泊车等功能都需要DBC参数的支持。
相对于传统驾驶模式,这些功能能够极大地提高车辆的智能化水平和驾驶的安全性。
三、DBC参数的应用1、控制车的元器件DBC参数可以用于控制车的各个元器件,包括轮胎、发动机、变速器等,在车辆运行时实现全权控制。
通过DBC参数,工程师可以将信号传给车内的元器件,让车的运行效果更为优秀。
2、控制安全系统驾驶员的安全对于车联网系统来说至关重要,通过DBC参数,车辆可实现远程监测与控制。
比如,当车发生碰撞时,DBC参数可以通过安全气囊的数据告知车辆中央控制器,进而控制安全气囊的张开,保障驾驶员的安全。
四、总结DBC参数为车联网中的数据标准化提供了可能。
GPS数据库范例
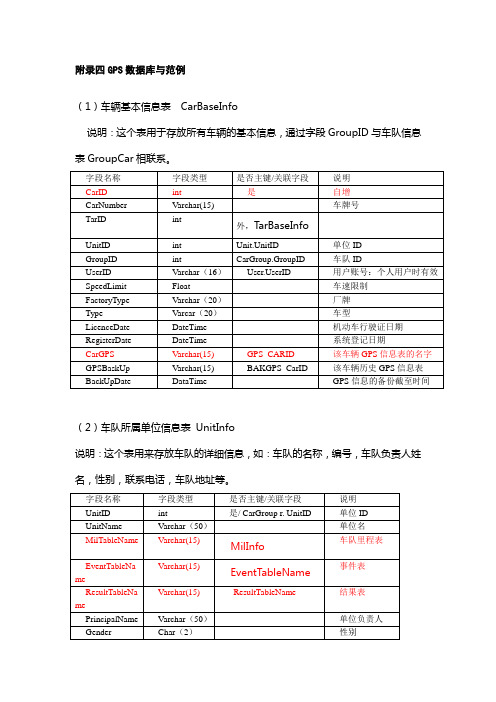
附录四GPS数据库与范例(1)车辆基本信息表CarBaseInfo说明:这个表用于存放所有车辆的基本信息,通过字段GroupID与车队信息表GroupCar相联系。
(2)车队所属单位信息表UnitInfo说明:这个表用来存放车队的详细信息,如:车队的名称,编号,车队负责人姓名,性别,联系电话,车队地址等。
(3)车辆GPS信息表CarGpsInfo说明:这个表主要用于接收的GPS信息,从而用于车辆现阶段的定位或历史记录的定位。
(4)单位里程表MilT able说明:用于存放一个单位的车辆的里程信息,包括泊车信息、上下高速(5)事件信息表Event说明:用于存放报警等事件信息,事件类型包括:0-报警、1-超速、2-离开泊车区域、3-开进泊车区域、4-上高速、5-下高速、6-超围栏事件、7-进围栏事件、8-泊车事件(6)结果分析表Result说明:用于存放一些分析结果信息,包括泊车信息、上下高速存储过程:GPS登记、里程表的登记触发器:创建车辆(生成GPS表)、删除车辆(删除GPS表)、创建单位(生成MILINFO表、事件信息表Event和结果分析表Result)、删除单位(删除MILINFO表、事件信息表Event和结果分析表Result)-- =============================================-- Author: <Author:hxw>-- Create date: <Create Date,20090528>-- Description: <Description,创建一车辆时候创建一个GPS表格存放该车辆的GPS 信息>-- =============================================ALTER TRIGGER [Insert_Car]ON [dbo].[CarBaseInfo]AFTER INSERTASdeclare @CarID intdeclare @GpsTableName varchar(20)declare @BakTableName varchar(20)declare @SqlStr varchar(300)BEGINselect @GpsTableName=CarGPS,@BakTableName=GPSBackUP from inserted IF(EXISTS(SELECT*FROM sysobjects WHERE NAME= @GpsTableName)) beginrollback tranprint('已经存在该辆车的GPS表')endset @SqlStr='Create table '+@GpsTableName+'(ID int IDENTITY (1, 1) NOT NULL Primary key,'+'CarID int NOT NULL ,'+'CarNumber varchar(15) NOT NULL,Longitude float NULL,'+'Latitude float NULL,'+'Speed float NULL,'+'Direction float NULL,'+'ReceiveTime datetime NULL ,'+'Interest int NULL,'+'InterestPoint varchar(40) NULL,'+'Area varchar(20) NULL)'exec(@SqlStr)if(@@error<> 0)beginrollback tranprint('添加车辆失败')returnendEND-- =============================================-- Author: <Author,,Name>-- Create date: <Create Date,,>-- Description: <Description,,>-- =============================================ALTER PROCEDURE [dbo].[AddMilRecord]@dip int,@StartTime datetime,@EndTime datetime,@Mil floatASdeclare @CarNumber varchar(15)declare @MilTableName varchar(15)declare @CarGPSTableName varchar(15)declare @DriveCode varchar(20)declare @SqlStr nvarchar(300)declare @RecordKey intBEGINBEGIN TRYBegin Tran SaveMilselect@RecordKey=UnitInfo.UnitID,@CarGPSTableName=CarBaseInfo.CarGPS,@CarNu mber=CarBaseInfo.CarNumber,@MilTableName=TableName from CarBaseInfo,UnitInfowhere CarBaseInfo.TarID=@dip andCarBaseInfo.UnitID=UnitInfo.UnitIDif(@RecordKey is not null)beginif exists(SELECT*FROM sysobjects WHERE NAME=@MilTableName)beginset @RecordKey=NULLset @SqlStr='SELECT @RdKey=ID FROM '+@MilTableName+' WHERE Carnumber=@CarNum and DriveEndTime=@Start'exec sp_executesql @SqlStr, N'@RdKey int output, @CarNumvarchar(15),@Start Datetime',@RecordKey,@CarNumber,@StartTimeif(@RecordKey is null)--找不到临接记录,则补里程exec FillMissing@CarNumber,@DriveCode,@StartTime,@MilTableName,@CarGPSTableName set @SqlStr='Insert into'+@MilTableName+'(Carnumber,DriveCode,DriveBeginTime,DriveEndTime,Mil) Values(@CarNum,@Drive,@Start,@End,@MMil)'exec sp_executesql @SqlStr,N'@CarNum varchar(15),@Drivevarchar(15),@Start Datetime,@End Datetime,@MMil float',@CarNumber ,@DriveCode ,@StartTime ,@EndTime,@MilendendCommit Tran SaveMilEND TRYBEGIN CATCHRollback Tran SaveMilEND CATCHEND-- =============================================-- Author: <Author,,Name>-- Create date: <Create Date,,>-- Description: <Description,,>-- =============================================CREATE PROCEDURE [dbo].[AddGpsRecord]@dip int,@RecTime datetime,@Latitude float,@longitude float,@Speed float,@Direction floatASdeclare @GpsTableName nvarchar(15)declare @EventTableName nvarchar(15)declare @ResultTableName nvarchar(15)declare @CarNumber nvarchar(15)declare @LastReceiveTime datetimedeclare @SpeedLimit floatdeclare @LastSpeed floatdeclare @LastDirection floatdeclare @LastLatitude floatdeclare @Lastlongitude floatdeclare @Interest intdeclare @EventName varchar(50)declare @SqlStr nvarchar(300)declare @Fencename varchar(20)declare @MaxStartTime datetimedeclare @MaxEndTime datetimedeclare @EventType intBEGINBEGIN TRYBegin Tran SaveGpsselect@GpsTableName=CarBaseInfo.CarGps,@CarNumber=CarBaseInfo.CarNumber,@Sp eedLimit=SpeedLimit,@EventTableName=UnitInfo.EventTableName,@ResultTa bleName=ResultTableNamefrom CarBaseInfo,UnitInfo where CarBaseInfo.TarID=@dip and CarBaseInfo.UnitID=UnitInfo.UnitIDset @SqlStr=N'SELECT @LastRecTime=MAX(ReceiveTime) FROM'+@GpsTableName+N' WHEREReceiveTime<'''+convert(varchar(40),@RecTime,121)++''''+' ANDSpeed>10.0 AND CarNumber='+''''+@CarNumber+''''exec sp_executesql @SqlStr, N'@LastRecTime datetimeoutput',@LastReceiveTime outputset @SqlStr=N'Select@LSpeed=Speed,@LDirection=Direction,@LLatitude=Latitude,@Llongitude=l ongitude FROM '+@GpsTableName+N' WHEREReceiveTime='+''''+convert(varchar(40),@LastReceiveTime,121)+''''exec sp_executesql @SqlStr, N'@LSpeed float output, @LDirection float output,@LLatitude float output,@Llongitude float output',@LastSpeed output, @LastDirection output, @LastLatitude output, @Lastlongitude outputif((@Speed>=100)OR(@LastSpeed>=10 and @Speed<=5)or(datediff(ss,@LastReceiveTime,@RecTime)>120 and @Speed>=10)OR(@Speed>=10.0 AND ABS(@Direction-@LastDirection)>=20))set @Interest=1--兴趣点,超速、停车、启动、方向变化大else set @Interest=0/*set @SqlStr=N'Select@LastRecTime=ReceiveTime,@LSpeed=Speed,@LDirection=Direction,@LLatitu de=Latitude,@Llongitude=longitude FROM '+@GpsTableName+ ' order by ReceiveTime 'exec sp_executesql @SqlStr, N'@LastRecTime datetime output,@LSpeed float output, @LDirection float output,@LLatitude floatoutput,@Llongitude float output',@LastReceiveTime output,@LastSpeed output , @LastDirection output, @LastLatitude output , @Lastlongitude output/*停车第一点或者少于间隔的停车点*/if((@Speed<=5 and @LastSpeed>=5) OR (@Speed<=5 and @LastSpeed<=5 and datediff(ss,@LastReceiveTime,@RecTime)<=20))set @Interest=1--兴趣点*/set @SqlStr='Insert into'+@GpsTableName+'(CarID,Carnumber,longitude,Latitude,Speed,Direction, ReceiveTime,Interest)Values(@Cardip,@CarNum,@Plongitude,@PLatitude,@PSpeed,@PDirection,@Re cTime,@PInterest)'exec sp_executesql @SqlStr,N'@Cardip int,@CarNumnvarchar(15),@Plongitude float,@PLatitude float,@PSpeedfloat,@PDirection float,@RecTime Datetime,@PInterest int',@dip ,@CarNumber ,@longitude ,@Latitude,@Speed,@Direction,@RecTime,@Interest/*希望能添加代码产生进出围栏事件,并登记到事件表中*/Commit Tran SaveGpsEND TRYBEGIN CATCHRollback Tran SaveGps--回滚END CATCHEND当我被上帝造出来时,上帝问我想在人间当一个怎样的人,我不假思索的说,我要做一个伟大的世人皆知的人。
测量数据存储的规范要求

测量数据存储的规范要求测量数据的准确性和完整性是保证科学研究和工程实践的重要基础。
为了确保测量数据的可靠性和可复现性,制定规范的数据存储要求是必不可少的。
本文将探讨测量数据存储的规范要求,以提供一个标准化的指导框架。
一、数据存储格式数据存储应使用标准的文件格式,如文本文件(txt)、电子表格(Excel)或数据库(SQL)。
这些格式具有普适性和开放性,能够在不同平台和软件之间进行数据的无缝交流和共享。
同时,数据存储格式应具备灵活性,可以根据数据类型和需求进行自定义设置。
二、数据命名和标识为了方便管理和查找,测量数据应该具有清晰的命名和标识。
命名应简洁明了,能够准确反映数据的内容和特征。
标识可以包括数据的日期、时间、测量位置、测量参数等信息,以便在后续分析和应用中能够准确识别和引用相应的数据。
三、数据备份和保护数据备份是保证数据安全和防止意外丢失的关键步骤。
定期进行数据的备份,将数据存储在不同的物理介质或服务器上,以防止单一媒体或设备损坏导致数据丢失。
此外,数据备份应采取加密措施,确保数据的机密性和完整性。
四、数据访问权限控制不同用户或团队可能对测量数据具有不同的访问和修改权限。
为了确保数据的安全和隐私,应对数据进行访问权限控制。
只有授权人员才能访问和修改数据,并且能够查看数据的访问记录,以便追溯数据的使用历史和责任。
五、数据更新和版本管理随着科学研究和工程实践的推进,测量数据可能需要进行更新和修订。
为了保证数据的完整性和可追溯性,应建立有效的数据更新和版本管理机制。
记录每次数据的修改和更新内容,包括修改的原因、时间、人员等信息,以便追溯和核查数据的变更历史。
六、数据验证和校准测量数据的准确性和可信度需要得到验证和校准。
在数据存储过程中,应记录数据的验证和校准方法、仪器设备的校正记录等信息,以确保数据的准确性和可靠性。
同时,应保存原始数据和校准数据的关联信息,以便在需要时能够进行追溯和校对。
七、数据共享和开放性科学研究和工程实践需要开放共享的数据资源。
SEG-Y 数据道头说明

SEGY格式是地震勘探中最常用的数据格式,所以了解SEGY格式、学会读取SEGY格式数据是非常必要的。
现将SEGY格式说明如下。
1、SEGY格式的一般情况每个数据占4个字节(既每个数据由32位2进制数字组成);一个SEGY数据文件的结构如下图:每个数据的4个字节的摆放顺序是:低位在前,高位在后。
如有一个十进制数据一千五百二十一,在SEGY格式中表示为:1251。
当然,SEGY格式是二进制的,这里用十进制为例,仅仅为了说明而已。
所以在读取SEGY格式的步骤有两个,Step1:读取一个32位的数据;Step2:互换该数据的第一个字节和第四个字节,互换该数据的第二个字节和第三个字节。
这时得到的数据才是确切的数据。
2、SEG-Y 格式道头说明字(32位) 字节号说明1 1-4* 一条测线中的道顺序号。
如果一条测线有若干卷带,顺序号连续递增。
2 5-8 在本卷磁带中的道顺序号。
每卷带的道顺序号从1开始。
3 9-12* 原始的野外记录号。
4 13-16* 在原始野外记录中的道号。
5 17-20 震源点号(在同一个地面点有多于一个记录时使用)。
6 21-24 CMP号。
7 25-28 在CMP道集中的道号(在每个CMP道集中道号从1开始)。
8-1 29-30* 道识别码:1=地震数据;4=时断;7=记时;2=死道;5=井口时间;8=水断;3=DUMMY;6=扫描道;9…N=选择使用(N=32767)8-2 31-32 产生这一道的垂直叠加道数(1是一道;2是两道相加;…)。
9-1 33-34 产生这一道的水平叠加道数(1是一道;2是两道叠加;…)。
9-2 35-36 数据类型:1=生产;2=试验。
10 37-40 炮检距(如果是相反向激发为负值)。
11 41-44 接收点高程。
高于海平而的高程为正,低于海平面为负。
12 45-48 炮点的地面高程。
13 49-52 炮点低于地面的深度(正数)(井深)。
14 53-56 接收点的基准面高程。
车身数据图
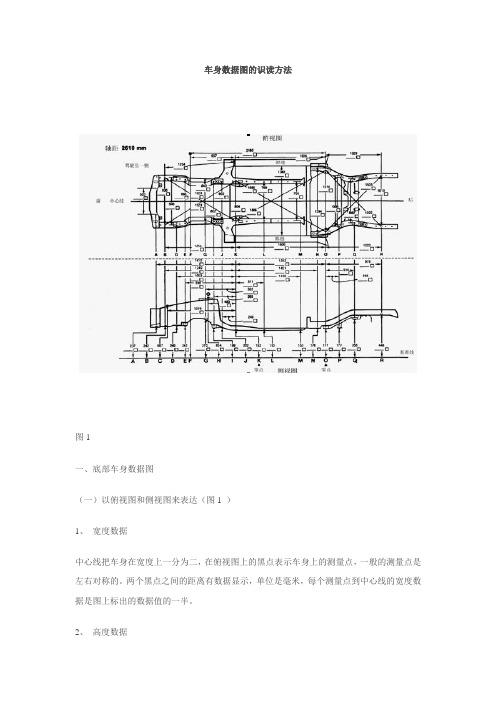
车身数据图的识读方法图1一、底部车身数据图(一)以俯视图和侧视图来表达(图1 )1、宽度数据中心线把车身在宽度上一分为二,在俯视图上的黑点表示车身上的测量点,一般的测量点是左右对称的。
两个黑点之间的距离有数据显示,单位是毫米,每个测量点到中心线的宽度数据是图上标出的数据值的一半。
2、高度数据高度基准线下方有从A至R的字母,表示车身测量点的名称,每个字母表示的测量点一般在俯视图都显示两个左右对称的测量点。
侧视图上每个点到高度基准线都有数据表示,这些数据就是测量点的高度值。
3、长度数据在高度基准线的字母K和O的下方有一个小黑三角,表示K和O是长度方向的零点。
它们就是车身的长度基准点,K点是车身前部测量点的长度基准,O点是车身后部测量点的长度基准。
从K点和O点向上各有一条线延伸至俯视图,在虚线的下方位置可以看出汽车前部、后部每个测量点分别到K点和O点的长度数据显示。
以A点为例说明识读。
图2(二)只以俯视图来表达(图2)左侧为发动机室数据图,代表车身的前方,右侧为车身底部数据图,代表车身的后方,同样要找到图中表示长宽高三个基准。
1、宽度数据车身上的测量点用1-28的数字表示,每个数字代表车身上左右两个测量点分别到中心面的数据,可以直接读出任一测量点的宽度数据。
2、高度数据在数据图的上方有一排图标,有圆圈、六角形和三角形等,内部有A、B、C和E等字母和数字。
圆圈表示测量点是一个孔,六角形表示测量点是一个螺栓,三角形表示测量部件的表面。
A、B、C、E等字母表示测量时所用测量头的型号。
数字表示高度数值,有时同一个点有两个高度值,是因为在测量时有螺栓时或拆掉螺栓后的高度是不同的。
3、长度数据在14号和18号测量点位置有两个黑色的X符号,表示这两点是长度方向的基准。
如图2,以车身后部18号点为长度基准,得到汽车前部各个测量点的长度数值;以车身前部14号点为长度基准,得到汽车后部各个测量点的长度数值。
左侧发动室的宽度基准与车身俯视图的宽度基准相同,在发动机室图下方的数字是表示1号-5号点距离6号点的长度,而6号点为发动机室新的长度基准,它距离18号点1790mm。
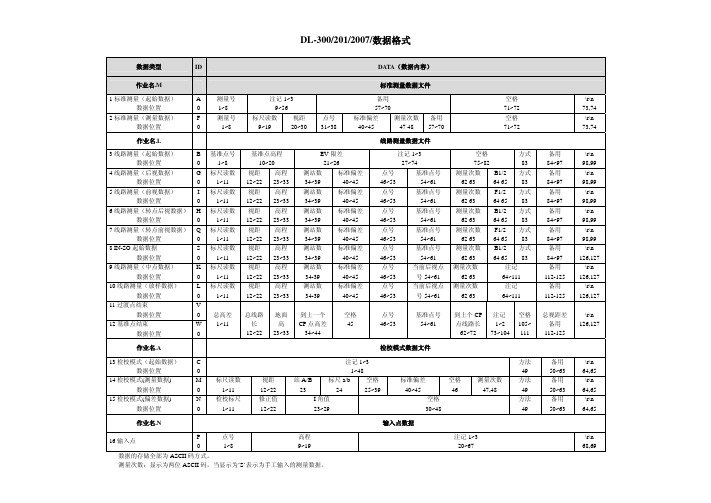
DL-200 300数据格式
EV 限差
21~26 测站数 标准偏差
34~39 测站数
40~45 标准偏差
34~39 测站数
40~45 标准偏差
34~39 测站数
40~45 标准偏差
34~39 测站数
40~45 标准偏差
34~39 测站数
40~45 标准偏差
34-39 测站数
40~45 标准偏差
34-39
40~45
到上一个 CP 点高差
40~45
47 48 57~70
空格 71~72 空格 71~72
作业名.L
线路测量数据文件
3 线路测量(起始数据)
B
数据位置
0
4 线路测量(后视数据)
G
数据位置
0
5 线路测量(前视数据)
I
数据位置
0
6 线路测量(转点后视数据) H
数据位置
0
7 线路测量(转点前视数据) Q
数据位置
0
8 IN-SO 起始数据
空格
方式
75~82 测量次数 B1/2
83 方式
62 63 测量次数
64 65 83 F1/2 方式
62 63 测量次数
64 65 83 B1/2 方式
62 63 测量次数
64 65 83 F1/2 方式
62 63 测量次数
64 65 83 B1/2 方式
62 63 测量次数
64 65 83 注记
62 63 测量次数
数据的存储全部为 ASCII 码方式。
测量次数:显示为两位 ASCII 码,当显示为’S’表示为手工输入的测量数据。
注记 1~3 20~67
备用 84~97 备用 84~97 备用 84~97 备用 84~97 备用 84~97 备用 84~97 备用 112-125 备用 112-125
GPS测量与数据处理-09GPS测量中数据格式

主讲人:王 华
5
RINEX格式概述
定 义 : 与 接 收 机 无 关 的 数 据 交 换 格 式 /Receiver INdependent
Exchange
历史:1989年由Astronomical Institute, University of Berne的
Werner Gurtner提出了第一个版本,当时的目的是处理EUREF 89 数据,现在为3.01版
L2 13
测值
P2
卫星数及卫
星列表
10 36.0000000
# / TYPES OF OBSERV INTERVAL TIME OF FIRST OBS END OF HEADER
接收机钟差
01 3 24 13 10 36.0000000 0 3G12G 9G 6
-.123456789
23629347.915
GPS原理与应用
第九章:GPS测量中的数据格式
1
内容提要
RINEX格式 SP3精密星历数据格式
主讲人:王 华
2
1. RINEX格式
主讲人:王 华
3
观测值文件的格式①
本机格式
定义:接收机存储数据的格式 存储方式:二进制 内容:观测值、广播星历、电离层信息、气象元素 特点
不同厂家的接收机具有不同的本机格式,并且有可能不公开 与接收机配套的数据处理软件(随机软件/商用软件)一般可以直
20886075.667
-28688.027 9 -22354.535 20886082.101
20611072.689
18247.789 9
14219.770 20611078.410
21345678.576
汽车基础知识大放送 汽车车型数据库参数解析
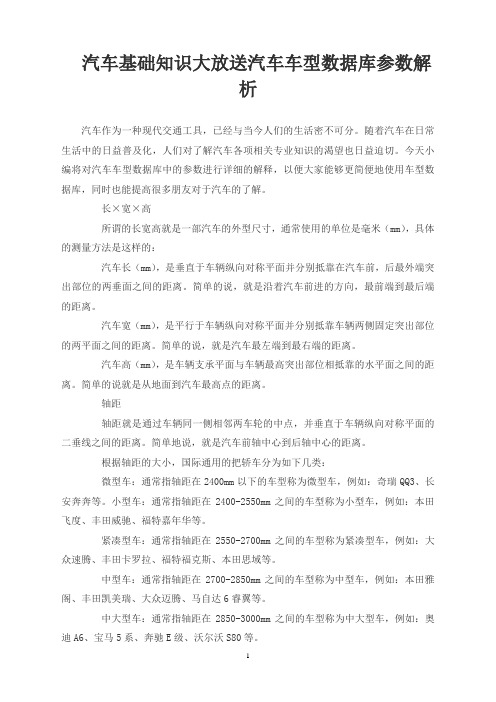
汽车基础知识大放送汽车车型数据库参数解析汽车作为一种现代交通工具,已经与当今人们的生活密不可分。
随着汽车在日常生活中的日益普及化,人们对了解汽车各项相关专业知识的渴望也日益迫切。
今天小编将对汽车车型数据库中的参数进行详细的解释,以便大家能够更简便地使用车型数据库,同时也能提高很多朋友对于汽车的了解。
长×宽×高所谓的长宽高就是一部汽车的外型尺寸,通常使用的单位是毫米(mm),具体的测量方法是这样的:汽车长(mm),是垂直于车辆纵向对称平面并分别抵靠在汽车前,后最外端突出部位的两垂面之间的距离。
简单的说,就是沿着汽车前进的方向,最前端到最后端的距离。
汽车宽(mm),是平行于车辆纵向对称平面并分别抵靠车辆两侧固定突出部位的两平面之间的距离。
简单的说,就是汽车最左端到最右端的距离。
汽车高(mm),是车辆支承平面与车辆最高突出部位相抵靠的水平面之间的距离。
简单的说就是从地面到汽车最高点的距离。
轴距轴距就是通过车辆同一侧相邻两车轮的中点,并垂直于车辆纵向对称平面的二垂线之间的距离。
简单地说,就是汽车前轴中心到后轴中心的距离。
根据轴距的大小,国际通用的把轿车分为如下几类:微型车:通常指轴距在2400mm以下的车型称为微型车,例如:奇瑞QQ3、长安奔奔等。
小型车:通常指轴距在2400-2550mm之间的车型称为小型车,例如:本田飞度、丰田威驰、福特嘉年华等。
紧凑型车:通常指轴距在2550-2700mm之间的车型称为紧凑型车,例如:大众速腾、丰田卡罗拉、福特福克斯、本田思域等。
中型车:通常指轴距在2700-2850mm之间的车型称为中型车,例如:本田雅阁、丰田凯美瑞、大众迈腾、马自达6睿翼等。
中大型车:通常指轴距在2850-3000mm之间的车型称为中大型车,例如:奥迪A6、宝马5系、奔驰E级、沃尔沃S80等。
豪华车:通常指轴距在3000mm以上的车型称为豪华车,例如:奔驰S级、宝马7系、奥迪A8等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基础数据的定义
1.1 数据符号定义
横向偏差:沿里程前进方向,右偏为正,左偏为负;
轨面高程偏差:为实测轨面高程与理论轨面高程之差,即高于理论轨面高程时候,轨面高程偏差为正,反之为负;
轨距偏差:为实测轨距与理论轨距(1435mm)之差,实测轨距大于理论轨距时,轨距偏差为正,反之为负;
超高:沿里程前进方向,测量点处右侧钢轨高出时,超高的符号为正,反之为负;
水平:沿里程前进方向,测量点处排除超高后,右侧钢轨高出时,水平的符号为正,反之为负;
轨向与正矢:沿里程前进方向,测量点处钢轨向右侧弯曲时,轨向与正矢的符号为正,反之为负,直线段正矢为0;
高低:测量点处钢轨相对于弦测基准点向上凸起时,高低的符号为正,反之为负;
扭曲:沿里程前进方向前方右侧高出时,扭曲的符号为正,反之为负;1.2 数据格式的定义
1.1.1 平面曲线的定义
如下图所示,平面曲线线路设计数据,保括线路起点信息(点名、里程、X坐标、Y坐标)、终点信息(点名、X坐标、Y坐标)、各交点信息(点名、X坐标、Y坐标、半径、第一缓和曲线长、第二缓和曲线长)。
我们按以下的方式来组织线路设计文件:
给定的线路交点数据起点里程后,所有里程皆以交点数据起始里程为参考里程值,所有位于该参考里程值后的里程数据通过考虑断链的影响,换算为相对于参考里程值的贯通里程。
线路左右与右线皆具有交点,其交点曲线表定义格式相同。
交点曲线表格式:至少包含一个起点与终点数据,在起点与终点中的数据为交点。
轨道测量仪需求的线路数据格式说明如下:
起点格式:点名;X坐标;Y坐标;起始里程
交点格式:点名; X坐标;Y坐标;平曲线半径;前缓和曲线长;后缓和曲线长;超高
终点格式:点名;X坐标;Y坐标
表1-1 交点数据格式
下图为一左线交点的数据示例:
图1-1 交点文件示例
1.1.2 坡度线的定义
目前,施工中的坡度线皆表示左线坡度线,其变坡点对应的里程为施工里程。
轨道测量仪需求的变坡点里程为相对于坡度线起点的连续里程,且以左线坡度线的格式给出。
对于坡度线每一行主要内容有以下:
里程:输入平面里程值[单位:米],此里程为相对于该区段平面曲线起点的连续里程。
H:H-变坡点高程值[单位:米]。
不含竖曲线修正
半径:竖曲线半径[单位:米]
表1-2 坡度线数据格式
下图为一左线交点的数据示例:
图1-2 坡度线文件示例
1.1.3 CPⅢ数据格式
对于CPⅢ每一行主要内容有以下:
CPⅢ点名;X坐标;Y坐标;棱镜的球心高程值
表1-3 CPⅢ数据格式
下图为一准备好的CPⅢ的数据示例:
图1-3 CPⅢ的数据文件示例。