基于DOS的多任务系统的实现(时间片)-操作系统
操作系统中的多任务处理
操作系统中的多任务处理
在操作系统中,多任务处理是指操作系统能够同时管理和执行多个任务的能力。
这种能力使得计算机系统能够更高效地利用资源,提高系统的响应速度和性能。
多任务处理有两种主要的方式:并发和并行。
并发是指在同一时间段内执行多
个任务,而并行是指在同一时刻执行多个任务。
在操作系统中,通常会采用并发的方式来实现多任务处理。
为了实现多任务处理,操作系统会使用一些技术和机制来管理和调度任务。
其
中最常见的技术包括进程管理、线程管理和调度算法。
进程是程序的执行实例,每个进程都有自己的独立地址空间和资源。
操作系统
通过进程管理来创建、删除和调度进程,确保它们能够正确地运行。
线程是在进程内部执行的轻量级任务,多个线程可以共享进程的资源,提高系统的并发性能。
线程管理负责创建和调度线程,保证它们能够协同工作完成任务。
调度算法是操作系统用来选择下一个要执行的任务的规则。
常见的调度算法包
括先来先服务、最短作业优先、时间片轮转和优先级调度等。
这些算法可以根据任务的特性和系统的需求来选择合适的调度方式,确保系统能够高效地完成任务。
通过多任务处理,操作系统能够更好地响应用户的请求,提高系统的利用率和
性能。
同时,多任务处理也能够提高系统的稳定性和可靠性,确保系统能够持续运行。
总的来说,操作系统中的多任务处理是一种重要的技朧,它可以提高系统的效
率和性能,提升用户体验,是现代计算机系统不可或缺的一部分。
通过合理地管理和调度任务,操作系统能够更好地满足用户的需求,提高系统的运行效率和稳定性。
时间片轮询多任务操作系统教材
时间片轮询多任务操作系统教材时间片轮询是一种常见的多任务处理方式,在操作系统中被广泛应用。
它是一种基于时间的任务调度算法,可以平衡不同优先级的任务,并在给定时间内公平地分配处理器资源。
在时间片轮询的多任务操作系统中,每个任务都被分配一个时间片,也就是一个固定的时间段,任务在这个时间片内运行。
当一个任务的时间片用尽后,操作系统会切换到下一个任务,并分配给它相同的时间片。
这个过程一直循环下去,直到所有任务都执行完毕。
时间片轮询的优势之一是公平性。
由于每个任务都有相同的时间片,所有任务都能够有机会使用处理器资源,避免了某些任务长时间占用处理器而导致其他任务得不到执行的情况。
这种公平性使得时间片轮询适用于多用户系统和实时系统等对任务响应时间有较高要求的场景。
另一个优势是简单性。
时间片轮询的实现较为简单,不需要复杂的任务调度算法和数据结构。
每个任务按照其优先级顺序排列,并按照相同的时间片大小依次执行。
这种简单性使得时间片轮询易于实现和调试。
然而,时间片轮询也存在一些不足之处。
首先,对于执行时间较长的任务,可能会导致其他任务的响应时间延迟,影响系统的整体性能。
其次,时间片的大小需要合理选择,过小会导致过多的上下文切换开销,而过大则可能导致任务响应时间过长,无法满足实时性要求。
为了解决上述问题,可以结合其他调度算法和技术来优化时间片轮询。
例如,可以引入优先级调度机制,将优先级较高的任务在时间片轮询中执行更多的时间片,以提高系统的响应能力。
另外,可以使用抢占式调度来确保高优先级任务能够及时执行,以满足实时系统的需求。
综上所述,时间片轮询是一种简单而公平的多任务调度算法,在各种应用场景中都有着广泛的应用。
通过合理选择时间片大小和引入其他调度算法的优化,可以使时间片轮询更好地满足系统的性能和实时性要求。
时间片轮询多任务操作系统是一种在操作系统中广泛应用的任务调度算法。
它采用了基于时间片的方式,有效地平衡了不同优先级任务之间的处理器资源分配。
关于操作系统中多任务处理的叙述
关于操作系统中多任务处理的叙述多任务处理是操作系统的一个重要特性,它允许计算机同时运行多个任务,使得用户可以同时执行多项操作。
在现代计算机系统中,多任务处理已经成为了普遍的标配。
首先,多任务处理可以提高计算机的利用率和效率。
在单任务处理时,如果一个任务正在等待一些资源或者IO操作完成,CPU就会被空闲浪费掉。
而使用多任务处理,当一个任务等待时,CPU会立即切换到其他的任务执行,从而充分利用了CPU的时间片段,提高了计算机的利用率。
多任务处理主要有两种实现方式,分时多任务处理和分段多任务处理。
分时多任务处理是指操作系统按照时间片的方式,轮流为每个任务分配一段时间片进行执行。
当时间片用完之后,操作系统就会中断当前任务的执行,保存当前任务的状态,并将CPU分配给下一个任务执行。
这种方式可以模拟出多个任务同时执行的效果,使得用户感觉好像计算机可以同时处理多个任务一样。
分段多任务处理是指在内存中为每个任务分配一段独立的内存空间,每个任务有自己的代码和数据。
操作系统会按照任务的优先级和调度算法来切换任务的执行,使得每个任务都能够得到一定的执行时间。
这种方式相对于分时多任务处理来说,可以更好地保护每个任务的隔离性,一旦其中一个任务出现问题,不会影响其他任务的执行。
在多任务处理中,任务调度是一个关键的问题。
任务调度决定了每个任务的执行顺序和优先级。
常见的任务调度算法有:轮转调度算法、优先级调度算法、最短作业优先调度算法等。
不同的调度算法适用于不同的场景,可以根据实际需求选择合适的算法。
此外,多任务处理也面临一些挑战和问题。
比如,资源分配问题,操作系统需要合理地分配各种资源给不同的任务使用,以避免资源不足导致的问题。
同时,任务间的同步和通信也是一个重要的问题,控制多个任务之间的数据共享和互斥访问,避免数据冲突和死锁等问题。
总之,多任务处理是现代操作系统的基石之一,它提高了计算机的利用率和效率,提升了用户体验。
合理地实现多任务处理,可以使得计算机系统能够同时运行多个任务,从而更好地满足用户的需求。
DOS环境下实时多任务调度策略的实现
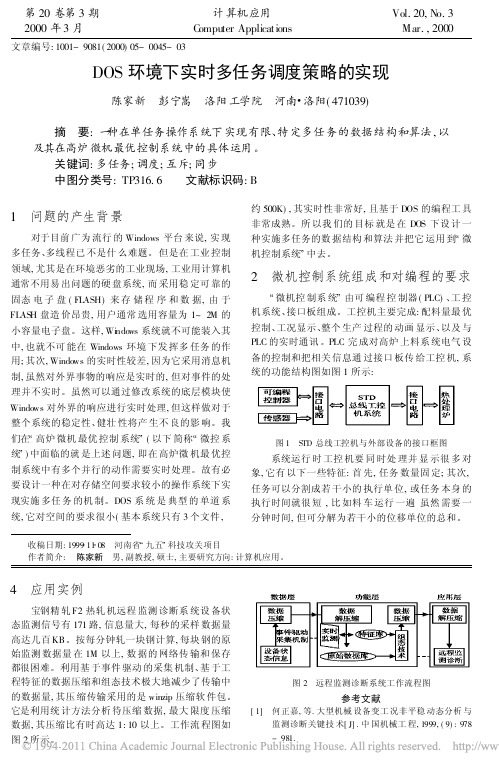
文章编号:1001-9081(2000)05-0045-03DOS 环境下实时多任务调度策略的实现陈家新 彭宁嵩 洛阳工学院 河南 洛阳(471039)摘 要:一种在单任务操作系统下实现有限、特定多任务的数据结构和算法,以及其在高炉微机最优控制系统中的具体运用。
关键词:多任务;调度;互斥;同步中图分类号:TP316.6 文献标识码:B1 问题的产生背景对于目前广为流行的Windows 平台来说,实现多任务、多线程已不是什么难题。
但是在工业控制领域,尤其是在环境恶劣的工业现场,工业用计算机通常不用易出问题的硬盘系统,而采用稳定可靠的固态电子盘(FLASH)来存储程序和数据,由于FLAS H 盘造价昂贵,用户通常选用容量为1~2M 的小容量电子盘。
这样,Wi ndows 系统就不可能装入其中,也就不可能在Windows 环境下发挥多任务的作用;其次,Windows 的实时性较差,因为它采用消息机制,虽然对外界事物的响应是实时的,但对事件的处理并不实时。
虽然可以通过修改系统的底层模块使Windows 对外界的响应进行实时处理,但这样做对于整个系统的稳定性、健壮性将产生不良的影响。
我们在 高炉微机最优控制系统 (以下简称 微控系统 )中面临的就是上述问题,即在高炉微机最优控制系统中有多个并行的动作需要实时处理。
故有必要设计一种在对存储空间要求较小的操作系统下实现实施多任务的机制。
DOS 系统是典型的单道系统,它对空间的要求很小(基本系统只有3个文件,约500K),其实时性非常好,且基于DOS 的编程工具非常成熟。
所以我们的目标就是在DOS 下设计一种实施多任务的数据结构和算法并把它运用到 微机控制系统 中去。
2 微机控制系统组成和对编程的要求微机控制系统 由可编程控制器(PLC)、工控机系统、接口板组成。
工控机主要完成:配料量最优控制、工况显示、整个生产过程的动画显示、以及与PLC 的实时通讯。
PLC 完成对高炉上料系统电气设备的控制和把相关信息通过接口板传给工控机,系统的功能结构图如图1所示:图1 STD 总线工控机与外部设备的接口框图系统运行时工控机要同时处理并显示很多对象,它有以下一些特征:首先,任务数量固定;其次,任务可以分割成若干小的执行单位,或任务本身的执行时间就很短,比如料车运行一遍虽然需要一分钟时间,但可分解为若干小的位移单位的总和。
关于操作系统中多任务处理的叙述

关于操作系统中多任务处理的叙述操作系统是一种管理计算机硬件和软件资源的软件系统。
多任务处理是操作系统的核心功能之一,它使计算机能够同时执行多个任务,并合理地分配系统资源,提高计算机的效率和性能。
多任务处理的出现可以追溯到计算机技术的发展。
在早期的计算机系统中,只能运行一个程序,用户需要按照一定的顺序来进行计算,这种方式效率低下且不灵活。
随着计算机的发展和需求的增加,人们开始意识到需要一种能够同时处理多个任务的系统。
实现多任务处理的关键是操作系统能够将计算机的处理能力合理分配给不同的任务。
在操作系统的控制下,计算机可以将处理能力划分为多个时间片,每个时间片分配给不同的任务进行执行。
这样,多个任务就可以交替执行,在人类的感知中,这些任务似乎是同时进行的。
多任务处理为用户提供了更好的用户体验。
例如在一台计算机上,用户可以同时进行多个任务,比如同时听音乐、上网浏览新闻、办公文件处理等。
这大大提高了用户的工作效率和娱乐体验。
除了提高用户体验外,多任务处理还能提高计算机的整体效率。
通过合理地利用计算机的处理能力,操作系统可以充分利用计算机的每一个资源,高效地完成各种任务。
这样,计算机的计算速度和响应速度都能得到有效的提升。
然而,多任务处理也面临着一些挑战。
由于计算机资源的有限性,当同时运行的任务过多时,可能会导致系统资源的过度占用,进而影响系统的性能。
为了解决这个问题,操作系统通常会采取一些策略,如优先级调度、进程挂起等。
这些策略有利于提高系统的整体性能,但也需要操作系统的良好设计和实现。
综上所述,多任务处理是现代操作系统中的重要功能之一。
它使计算机能够同时执行多个任务,并合理地分配系统资源,提高计算机的效率和性能。
多任务处理不仅提高了用户的体验,也提高了计算机的整体效率。
然而,多任务处理也面临着挑战,需要操作系统的良好设计和实现。
因此,对于操作系统的开发者和使用者来说,了解和掌握多任务处理的原理和方法,将有助于更好地利用操作系统的功能,提高计算机的性能和效率。
操作系统多任务系统实验报告
杭州电子科技大学操作系统课程设计课程设计题目:基于DOS的多任务系统实现姓名:庄严庭班级:09056011学号:05056012学院:计算机学院专业:计算机科学与技术(2+2)负责老师:胡志凌完成日期:2012-5-22基于DOS的多任务系统的实现一,课程设计的目的通过对线程(和进程)的创建和撤销,CPU的调度,同步机制,通信机制的实现,以达到一下目的:1,加深对线程和进程概念的理解,明确进程和程序的区别。
2,加深对CPU调度过程(现场保护,CPU的分派和现场的恢复)的理解。
3,进一步认识并执行的概念,明确顺序执行和并发执行的区别。
4,加深对临界资源,临界区,信号量以及同步机制的理解。
5,加深对消息缓冲通信的理解。
二,设计要求1,用C语言完成线程的创建和撤销,并按优先权加时间片轮转算法对多线程进行调度。
2,改变时间片的大小,观察结果的变化,3,假设两个线程共用同一软件资源(如某以变量,或者某以数据结构),请用记录型信号量来实现对它的互斥访问。
4,假设有两个线程共享一个可以存放5个整数的缓冲,一线程不停地计算1至50的平方,并将结构放入缓冲中,另一个线程不断地从缓冲中取出结果,并将它们打印出来,请用记录型信号量实现这一生产者和消费者的同步问题。
5,实现消息缓冲通信,并与3,4中的简单通信进行比较。
三,程序设计思想以及总流程图1,程序的设计思想:该程序主要是分5大块内容:线程的创建和撤销,线程的调度,线程的同步与互斥,线程的阻塞与唤醒,利用消息缓冲队列的线程间的通信。
由这五大块功能来完成的基于DOS的多任务系统的实现。
在这个系统中,首先先由main函数进行一些初始化工作,然后直接创建0#线程对应于main函数,再由0#线程调用create创建1#,2#线程分别对应与函数f1(),f2(),最后将系统的中断服务程序设置为new_int8,并把控制交给1#线程,启动多个线程的并发执行。
0#线程是一个比较特殊的线程,它在创建的时候没有使用create来创建,而是在系统初始化后直接创建的,因它对应的程序段为main函数中的一段,所以也直接使用整个系统的堆栈,而不再创建时为私有堆栈分配额外的空间;同样,撤销的时也不需要释放私有堆栈的空间,所以也没有over()函数而是直接撤销,从这方面来看,它是一个系统线程。
计算机如何实现多任务处理
计算机如何实现多任务处理在当今数字化的时代,计算机已经成为我们生活和工作中不可或缺的工具。
我们常常会同时进行多项任务,比如一边听音乐,一边写文档,一边还在下载文件。
那么,计算机是如何实现这种多任务处理的呢?要理解计算机的多任务处理,首先得明白计算机的基本工作原理。
计算机的核心是中央处理器(CPU),它就像是计算机的大脑,负责执行各种指令和计算。
在早期的计算机中,CPU 一次只能处理一个任务,完成一个任务后才能处理下一个,这被称为单任务处理。
然而,随着技术的发展,多任务处理成为了可能。
这主要依赖于操作系统的支持。
操作系统是计算机的管理系统,它负责协调和分配计算机的资源,包括 CPU 时间、内存、硬盘空间等,以实现多个任务的同时运行。
其中,分时系统是实现多任务处理的关键技术之一。
分时系统将CPU 的时间分成很小的时间片,每个任务在一个时间片内获得 CPU 的使用权。
当时间片用完后,操作系统会切换到另一个任务,给每个任务都提供了看似连续的运行时间。
这样,多个任务就能够在短时间内交替执行,从而实现了多任务处理。
为了有效地管理多任务,操作系统还采用了进程和线程的概念。
进程可以理解为一个正在运行的程序实例,它拥有自己独立的内存空间和资源。
而线程则是进程中的执行单元,多个线程可以共享进程的资源。
通过创建多个进程或线程,计算机可以同时执行多个不同的任务或任务的不同部分。
比如说,当我们打开一个浏览器浏览网页时,浏览器就是一个进程。
在这个进程中,可能有多个线程在同时工作,一个线程负责接收和处理网络数据,另一个线程负责渲染网页页面,还有一个线程负责响应用户的操作。
内存管理在多任务处理中也起着重要的作用。
由于多个任务同时运行,需要足够的内存来存储它们的数据和代码。
操作系统通过虚拟内存技术,让每个进程都认为自己拥有独立的、连续的内存空间,实际上这些内存可能是分散在物理内存中的不同位置,甚至可能部分被存储在硬盘上的交换文件中。
操作系统的多任务处理和调度算法

操作系统的多任务处理和调度算法在计算机科学领域中,操作系统是一种重要的软件系统,它起着管理和控制计算机硬件和软件资源的作用。
其中,多任务处理和调度算法是操作系统的核心功能之一。
多任务处理指的是操作系统能够同时运行多个任务(程序),并在它们之间进行切换执行的能力。
这种并发执行的方式可以提高计算机系统的效率和资源利用率。
而调度算法则负责决定哪个任务应该优先执行、如何分配处理器时间以及如何调度进程等。
操作系统的多任务处理和调度算法的设计要考虑到以下几个方面:1. 执行顺序:操作系统需要确定多个任务执行的顺序。
常见的执行顺序有两种模式:抢占式和非抢占式。
在抢占式模式下,操作系统可以中断当前正在执行的任务,并将处理器资源分配给其他任务。
而在非抢占式模式下,任务只有在主动释放处理器资源后,才能将其分配给其他任务。
2. 优先级调度:每个任务都可以分配一个优先级,用于确定任务的执行顺序。
优先级调度算法可以根据任务的优先级来决定任务的执行顺序。
一般情况下,优先级较高的任务会先被执行,并占用更多的处理器时间。
3. 时间片分配:为了确保每个任务都能得到执行的机会,操作系统会将处理器的执行时间划分为若干个时间片段。
时间片分配算法可以决定每个任务获取的时间片的长度。
常见的时间片分配算法有固定时间片轮转算法和动态时间片轮转算法。
固定时间片轮转算法为每个任务分配相同长度的时间片,而动态时间片轮转算法则根据任务的优先级或执行时间来分配不同长度的时间片。
4. 阻塞和唤醒:在多任务处理中,任务可能会由于等待某些事件的发生而阻塞。
当任务被阻塞时,操作系统需要将处理器资源分配给其他可执行的任务。
一旦被等待的事件发生,操作系统会将任务唤醒,并恢复其执行。
5. 死锁处理:在多任务处理中,由于各个任务之间资源的竞争,可能会出现死锁的情况。
死锁指的是多个任务因为相互等待对方释放资源而无法继续执行的状态。
操作系统需要设计相应的死锁检测和解除机制,以避免系统陷入死锁状态。
操作系统的多任务处理与分时系统介绍
操作系统的多任务处理与分时系统介绍操作系统是计算机系统中的核心软件,负责管理计算机的资源,为其他应用软件提供运行环境。
多任务处理和分时系统是操作系统中重要的概念和功能,本文将对多任务处理和分时系统进行详细介绍。
一、多任务处理多任务处理是指操作系统能够同时运行多个任务或程序。
在单核处理器的系统中,通过操作系统的调度算法,将CPU的时间片分配给各个需要运行的任务,使得这些任务看起来是同时运行的。
而在多核处理器的系统中,不同的核心可以同时运行不同的任务,实现真正的并发执行。
多任务处理的好处是提高了系统的资源利用率,使得多个任务可以同时进行,大大提高了计算机系统的效率。
同时,多任务处理也需要考虑任务之间的调度和资源分配,需要一套完善的调度算法来平衡各个任务的执行顺序和优先级。
二、分时系统分时系统是多任务处理的一种应用,它通过将时间分配给不同的用户进程或任务,使得每个用户都感觉自己独占了计算机系统。
分时系统通常在服务器端使用,用户通过终端或远程登录的方式使用计算机资源。
分时系统的核心是时间片轮转调度算法。
每个任务被分配一个时间片,当时间片用完后,操作系统会自动切换到下一个任务,使得每个用户都能够在短时间内得到响应。
分时系统的优点是提高了用户的交互性和响应速度,缺点是对计算机的计算能力和资源要求较高。
三、多任务处理与分时系统的应用多任务处理和分时系统广泛应用于各个领域的计算机系统中。
在桌面操作系统中,多任务处理使得用户可以同时运行多个应用程序,提高了工作效率。
在服务器端,分时系统通过虚拟化技术,为多个用户提供服务,实现资源的合理分配和共享。
此外,多任务处理和分时系统也被广泛应用于嵌入式系统和实时系统中。
嵌入式系统中,多任务处理可以同时运行多个任务,满足设备的不同功能需求。
实时系统中,多任务处理可以保证任务的实时响应能力,如飞行控制系统、医疗仪器等。
总结:操作系统的多任务处理和分时系统是提高计算机系统效率和用户体验的重要手段。
基于DOS的实时多任务系统的实现
·43 ·
printf (”通信动作”) ; txtime = 18 ; } }
其中 roubinround () 是主调度循环 ,可以由用户指 定调度周期 ,这是由定时中断中的软定时器实现的 ,调 度精度可调 。
从上面的程序结构中可得到 ,在 DOS 系统中仍然 可以让多任务实现 ,而且程序的功能可方便地增加 ,因 为此程序的结构是并联的关系 ,但随着任务数量的增 多 ,调度性能会有所下降 ,用户可以根据具体的应用来 确定自己的调度策略 。
}
由以上的程序框架可以方便地添加或裁减并行处
理的任务 ,但必须注意的是 ,为了平等地得到尽可能快
的响应 ,必须注意 :
①大循环中的所有对象处理模块必须是独立的任
务;
②面向各对象的任务模块必须在最短的时间里返
回发的任务采用事件队列和标志实
现。
北京长安自动化工程集团 铁路公路隧道 、煤气石化站库防爆监控系统 电话 :010 - 65684527
1 应用设计的确立
Abstract :A practical way to realize a real2time multitask system based on DOS is discussed. Key words :multitask ; R TOS ;DOS
如今工控领域的特殊环境和应用要求的不断扩展 使嵌入式系统得到了广泛的应用 ,嵌入式实时操作系 统 ( R TOS) 日益受到技术人员的青睐 。在制造 、控制 、 通信 、仪器仪表 、医疗设备 、汽车船舶 、航空航天 、军事 装备 、消费类电子等产品中都可以发现它的应用 。
基于 DOS 的实时多任务系统的实现 文章编号 :1000 - 8829 (2002) 06 - 0041 - 03
多任务系统 原理

多任务系统原理多任务系统是一种操作系统的核心功能,它允许在同一时间内运行多个任务。
多任务系统的原理是通过时间片轮转和任务调度来实现的。
在传统的单任务系统中,一次只能运行一个任务,当一个任务执行完成后,才能执行下一个任务。
这种方式效率低下,无法满足用户的需求。
而多任务系统则可以同时运行多个任务,从而提高系统的效率和响应速度。
多任务系统的原理是基于时间片轮转的。
时间片是操作系统分配给每个任务的最小时间单位。
系统将CPU的执行时间划分为若干个时间片,每个任务在一个时间片内执行一定的指令。
当一个时间片执行完后,系统会切换到下一个任务,继续执行下一个时间片。
这样循环往复,就实现了多个任务的并行执行。
除了时间片轮转,多任务系统还需要进行任务调度。
任务调度是指根据一定的策略,决定将哪些任务放入执行队列,以及选择哪个任务来执行的过程。
任务调度的目的是充分利用系统资源,提高系统的吞吐量和响应速度。
任务调度可以根据任务的优先级来进行。
每个任务都会有一个优先级,优先级高的任务会被优先调度执行。
这样可以保证重要任务的及时执行。
另外,任务调度还可以根据任务的状态来进行。
比如,当一个任务等待某个事件的发生时,可以将它挂起,让其他任务先执行。
当事件发生后,再将该任务唤醒继续执行。
多任务系统的原理使得操作系统能够同时处理多个任务,从而提高了系统的并发能力和响应速度。
它可以让用户同时进行多个操作,比如打开多个应用程序、同时进行下载和浏览网页等。
多任务系统还可以提供对任务的管理和控制,比如可以暂停、恢复或取消某个任务的执行。
当然,多任务系统也存在一些问题。
由于CPU每个时间片只能执行一部分指令,因此对于一些需要实时响应的任务,可能会出现延迟。
另外,多个任务之间的资源竞争也可能导致系统的性能下降。
因此,需要合理安排任务的优先级和资源的分配,以充分发挥多任务系统的优势。
多任务系统是现代操作系统的重要功能之一。
它通过时间片轮转和任务调度实现多个任务的并行执行,提高了系统的效率和响应速度。
电脑操作系统中的多任务处理是如何实现的

电脑操作系统中的多任务处理是如何实现的在当今数字化的时代,我们使用电脑进行各种各样的工作和娱乐活动,比如一边听音乐,一边写文档,同时还可能在后台下载文件。
这种能够同时处理多个任务的能力,就是电脑操作系统中的多任务处理。
那它到底是怎么实现的呢?要理解多任务处理,首先得明白电脑的中央处理器(CPU)在同一时刻实际上只能执行一个任务。
但是,由于 CPU 的处理速度非常快,它可以在极短的时间内切换处理不同的任务,从而给我们造成了同时处理多个任务的“错觉”。
操作系统通过一种叫做“任务调度”的机制来管理这些任务。
当多个任务都在等待 CPU 处理时,操作系统会根据一定的规则和算法来决定哪个任务先获得 CPU 的使用权。
这些规则通常会考虑任务的优先级、任务的等待时间等因素。
优先级是任务调度中一个非常重要的概念。
比如说,系统的关键进程(如处理用户输入的进程)通常会被赋予较高的优先级,以确保用户能够及时得到响应。
而一些后台的非关键任务(如磁盘碎片整理)则可能被赋予较低的优先级。
除了优先级,任务的等待时间也会影响调度。
如果一个任务已经等待了很长时间,操作系统可能会优先处理它,以避免这个任务被过度延迟。
在多任务处理中,还有一个关键的概念叫做“时间片”。
操作系统会把 CPU 的处理时间分割成一个个很小的时间片,然后轮流分配给不同的任务。
每个任务在获得一个时间片后,就可以在这个时间片内执行自己的操作。
当时间片用完后,操作系统会暂停当前任务,保存它的状态(包括程序计数器、寄存器的值等),然后切换到下一个任务。
任务的状态保存和恢复是实现多任务处理的重要环节。
当操作系统切换任务时,它需要确保当前任务的所有相关信息都被妥善保存,以便下次重新获得 CPU 使用权时能够从上次中断的地方继续执行。
为了有效地实现多任务处理,操作系统还需要对内存进行管理。
每个任务都需要自己的内存空间来存储数据和代码。
操作系统通过虚拟内存技术,使得每个任务都感觉自己拥有整个内存空间,而实际上它们是共享物理内存的。
计算机操作系统中的多任务处理和调度
计算机操作系统中的多任务处理和调度计算机操作系统是现代计算机系统中的核心组成部分,负责管理计算机硬件和软件资源的分配和调度。
在操作系统中,多任务处理和调度是其中重要的概念和功能之一。
本文将围绕计算机操作系统中的多任务处理和调度展开论述,探讨其原理、分类、算法和应用。
一、多任务处理的原理多任务处理是指在计算机系统中同时运行多个任务的能力。
在计算机操作系统中,多任务处理通过时间片轮转和进程切换来实现。
操作系统将CPU的使用时间分割成若干个时间片,每个任务被分配到一个时间片内运行,当时间片用完后,操作系统将当前任务暂停并让下一个任务开始运行,通过不断切换执行的任务,实现多任务处理。
二、多任务处理的分类根据任务执行的方式和特点,多任务处理可分为协作式和抢占式两种。
1. 协作式多任务处理协作式多任务处理是指每个任务在执行过程中,主动释放CPU的控制权给其他任务。
任务间的切换由当前任务自行控制,任务的执行顺序和时间由任务本身协调。
然而,这种方式容易造成某个任务出现问题导致整个系统崩溃,同时也无法有效利用系统资源。
2. 抢占式多任务处理抢占式多任务处理是指操作系统根据一定的策略主动中断当前任务的执行,将CPU控制权转移到其他任务上。
任务的执行顺序由操作系统决定,可以根据任务的优先级和时间片等进行调度。
这种方式可以更好地保障系统的稳定性,提高系统资源的利用率。
三、多任务处理的调度算法在实现多任务处理中,操作系统需要根据任务的优先级和运行状态进行调度,以保证每个任务都能得到合理的执行机会。
常见的调度算法包括:1. 先来先服务调度(FCFS)先来先服务调度是指按照任务到达的先后顺序进行调度。
优点是简单易懂,缺点是无法有效地处理长任务和短任务混合的情况,可能导致长任务占用CPU时间较长,影响其他任务的执行效率。
2. 短作业优先调度(SJF)短作业优先调度是指按照任务执行时间的长短进行调度,即优先执行执行时间短的任务。
计算机操作系统中的多任务处理方法
计算机操作系统中的多任务处理方法随着科技的进步和计算机应用的普及,计算机操作系统的发展也变得日益重要。
操作系统是计算机系统中的核心软件,负责管理和控制计算机硬件资源,为用户和应用程序提供良好的使用界面和资源分配。
其中,多任务处理是操作系统的重要功能之一,它使得计算机可以同时运行多个任务,提高了整体的工作效率。
在计算机操作系统中,多任务处理分为两种基本方法:并行处理和时间片轮转。
首先,我们来讨论并行处理。
并行处理是指多个任务同时进行的处理方式。
在并行处理中,计算机系统会为每个任务分配独立的处理器,任务可以在不同的处理器上并行执行。
这样做的好处是可以充分利用计算机系统的处理能力,提高整体的处理速度和效率。
例如,在一个多核处理器系统中,可以同时运行多个不同的任务,这样可以确保每个任务都有足够的处理能力,不会因为其他任务的干扰而出现卡顿或延迟的情况。
并行处理还可以提高计算机系统的可靠性,当一个处理器出现故障时,其他处理器仍然可以继续工作,从而保障整个系统的正常运行。
然而,并行处理也存在一些问题。
首先是资源管理的复杂性。
由于每个任务都需要独立的处理器和内存空间,操作系统需要确保各个任务之间的资源互不冲突,同时还要合理地分配和调度各个任务所需的资源。
这对于操作系统来说是一个挑战,需要设计合适的调度算法和资源分配策略。
其次是任务之间的通信和同步问题。
在并行处理中,不同任务之间可能需要进行数据交换或共享资源,这就需要操作系统提供相应的机制来保证数据的一致性和并发性。
除了并行处理,操作系统还使用了时间片轮转的方式来实现多任务处理。
时间片轮转是指将处理器的使用时间划分为若干个时间片,每个任务依次在一个时间片内执行一段时间,然后切换到下一个任务。
时间片轮转可以保证每个任务都能得到一定的处理时间,从而避免了某个任务长时间占用处理器的情况。
虽然时间片轮转无法实现真正的并行处理,但却可以在多个任务之间实现快速的切换,从而让用户感觉到任务是同时执行的。
操作系统的多任务处理

操作系统的多任务处理操作系统是计算机硬件与应用程序之间的关系管理者,它负责调度和管理计算机资源,为应用程序提供必要的支持和服务。
而多任务处理作为操作系统的一个重要特性,在提高计算机效率和资源利用率方面具有重要作用。
本文将探讨操作系统的多任务处理机制及其应用。
一、多任务处理概述多任务处理是指操作系统能够同时执行多个任务,使得用户感觉像是多个任务在同时进行。
它分为并行处理和时间片轮转两种方式。
1. 并行处理并行处理是指在多处理器或多核处理器系统中,多个任务能够同时执行。
每个处理器或核心负责一个任务,通过并行计算、并发执行提高了整个系统的计算速度和效率。
2. 时间片轮转时间片轮转是指操作系统按照时间片(一小段时间)轮流分配给各个任务,使得多个任务可以交替执行。
每个任务在一个时间片内执行一段时间,然后让出CPU资源给其他任务,通过快速切换任务的方式,让用户感觉多个任务在同时进行。
二、多任务处理的实现机制为了实现多任务处理,操作系统需要具备以下几个重要的机制:1. 进程管理进程管理是指操作系统对进程的创建、调度、状态转换和销毁等操作。
操作系统为每个任务分配一个独立的进程,并利用进程调度算法按照一定的优先级和策略进行调度,确保每个任务都能够得到公平的执行机会。
2. 任务切换多任务处理需要操作系统具备快速任务切换的能力,以实现任务间的流畅转换。
当一个任务的时间片用尽或发生阻塞时,操作系统会迅速切换到下一个任务,保证多个任务都能够得到执行。
3. 资源分配操作系统需要合理地分配和管理CPU、内存、外设等计算机资源,以满足多个任务对资源的需求。
通过资源分配策略,操作系统能够为每个任务提供所需的资源,并确保资源的公平分配和高效利用。
三、多任务处理的应用多任务处理在操作系统中广泛应用于各种场景,提供了更加灵活和高效的计算环境。
1. 多用户环境在多用户环境下,多任务处理允许多个用户同时进行各自的操作和任务。
每个用户可以独立地运行自己的应用程序,而不会干扰其他用户的操作。
计算机操作系统中的多任务处理与调度算法

计算机操作系统中的多任务处理与调度算法随着计算机应用场景的多样化,多任务处理成为操作系统中必不可少的一部分。
在计算机操作系统中,多任务处理涉及到如何有效地利用计算机资源,使多个任务并发执行,以提高系统的运行效率和资源利用率。
为了实现多任务处理,操作系统需要采用相应的调度算法来决定任务的执行顺序和时间片分配,以确保系统的公平性、高效性和稳定性。
一、多任务处理的概念与分类多任务处理是指操作系统能够同时运行多个任务,使得这些任务在用户看来就像在同时执行一样。
根据任务之间的关系,多任务处理可以分为协作式和抢占式两种模式。
协作式多任务处理模式要求各个任务之间主动地协调与合作,每个任务必须主动释放CPU资源,否则其他任务无法执行。
这种模式的优点是实现简单,但是一旦有任务崩溃或者无限循环,将会导致整个系统崩溃。
抢占式多任务处理模式则由操作系统来决定任务的执行优先级和时间片分配,可以主动抢占正在执行的任务,使其他任务有机会执行。
这种模式的优点是能够保证系统的稳定性和响应性,但实现相对复杂。
二、常见的调度算法1. 先来先服务(FCFS)先来先服务是一种简单的调度算法,按照任务到达的顺序进行调度,即先到达的任务优先执行,直到该任务执行完毕或者发生阻塞。
优点是公平,缺点是无法应对执行时间较长的任务,可能导致其他任务的等待时间较长。
2. 最短作业优先(SJF)最短作业优先调度算法是根据任务的执行时间来进行调度,执行时间最短的任务先执行。
优点是能够减少平均等待时间,提高系统的执行效率,缺点是对执行时间较长的任务不公平。
3. 时间片轮转(RR)时间片轮转调度算法将任务划分为等长的时间片,每个任务按照时间片的顺序轮流执行,每个任务执行一个时间片后切换至下一个任务,循环往复。
优点是公平,能够保证每个任务都能获得一定的执行时间,同时也能快速响应用户的操作。
缺点是对于执行时间较长的任务,会造成一定的延迟。
4. 优先级调度优先级调度算法根据任务的优先级来进行调度,优先级高的任务先执行。
时间管理-时间片轮询多任务操作系统教材(PPT31页)
通常,为了提高可移植性,采用一个宏或函数来编
目
录
4
内部变量初始化
5
创建任务
6
7 8
启动多任务环境
任务调度 时钟节拍中断
tnOsStart()
在TinyOS51 V1.1中,如果不允许中断,则时钟节拍中断服务程序不会运 行,因此,在tnOsStart()中增加允许中断的代码。
void tnOsStart (void) { EA = 1; longjmp (__GtcbTask[0].jbTaskContext); } tnOsInit()中__GthTaskCur = 0, 即当前运行任务为0号任务。
3
带优先级调度的时间片轮询
时间片长度Δt一般为1~10ms
任务的运行时间
t
时间片轮询系统中任务运行情况
t
在时间片轮询操作系统中,CPU的执行时间被划分为若干时间 片,然后让处于就绪状态的任务,按顺序轮流占用CPU。当时间片 用完时,即使任务未执行完,系统也剥夺此任务的CPU使用权力。
所有任务相同对待,分时运行。
// 操作的任务
// 任务初始处于删除状态 // 设置初值
// 初始运行0号任务
目
录
3
任务控制块
4
内部变量初始化
5
OsTaskCreate()
由于tnOsTaskCreate()要操作TCB,而时钟节拍中断中也要操作TCB,因 此tnOsTaskCreate()中操作TCB的代码为临界区代码,要避免被时钟节拍中断 打断。 TinyOS51中采用开/关中断的方式解决此问题。
OS初始化函数代码:
void tnOsInit (void) { TN_OS_TASK_HANDLE thTask; for (thTask = 0; thTask < TN_OS_MAX_TASKS; thTask++) { __GtcbTasks[thTask].ucTaskStat = __TN_TASK_FLG_DEL; __GtcbTasks[thTask].uiTicks = 0; } __GthTaskCur = 0; }
基于DOS的实时多任务操作系统的实现及其应用
基于DOS的实时多任务操作系统的实现及其应用
唱江盛;郭争光
【期刊名称】《计算机工程与应用》
【年(卷),期】1994(000)011
【摘要】本文介绍一个基于DOS的实时多任务操作系统RMDOS的设计,详细讨论了其实现过程中的一些主要问题及其解决方案,最后介绍了RMDOS在血液检验仪实时数据管理系统中的应用。
【总页数】4页(P66-69)
【作者】唱江盛;郭争光
【作者单位】不详;不详
【正文语种】中文
【中图分类】TP316.2
【相关文献】
1.DOS操作系统上实时多任务的实现方法 [J], 张子芳
2.RTDOS实时多任务操作系统的设计与实现 [J], 李发基;尹京平
3.RTDOS实时多任务操作系统的设计与实现 [J],
4.基于MS—DOS的多任务实时操作系统—MOROS的实现的研究 [J], 徐亚
5.DOS环境下多任务实时操作系统的探讨与实现 [J], 卢义明
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
unsigned ss; /*堆栈段址*/
unsigned sp; /*堆栈指针*/
char state; /*线程状态*/
char name[15]; /*线程外部标识符*/
struct TCB *next;
enable();
}
void interrupt my_swtch(void)
{
disable();/*开中断*/
/*保护正在执行的线程current的现场,暂停它的执行*/
tcb[current].ss=_SS;
tcb[current].sp=_SP;
if(tcb[current].state==RUNNING)
}
void proceducer()
{
int i, j, k;
for(i = 1; i <=13;i++){
wait(&empty);
wait(&mutex);
buffer[in] = i*i;
printf("%s puts a number of %d in the buffer \n",tcb[current].name, buffer[in]);
struct SREGS segregs;
regs.h.ah = GET_INDOS;
intdosx(®s,®s,&segregs);
indos_ptr = MK_FP(segregs.es,regs.x.bx);
if(_osmajor<3) crit_err_ptr = indos_ptr+1;
typedef int (far *codeptr)(void); /*定义了一个函数指针类型*/
int buffer[NBUF] = {-1,-1,-1,-1,-1,-1}; /*生产者消费者中的缓冲区*/
int in = 0;
int out = 0;
typedef struct{
int value;
my_swtch();
}
void tcb_state()
{
int i;
printf("These are the information of all threads: \n");
for(i=0;i<NTCB-1;i++)
{
printf("the key word of the thread is : %d\n the name of thread is : %s\n the state of the thread is ",i,tcb[i].name);
switch(tcb[i].state)
{
case (1): printf("Running \n");break;
case (2): printf("Ready \n");break;
case (3): printf("Blocked\n");break;
case (0): printf("Finished\n");break;
tcb[current].state=READY;
/*找到新的就绪线程i*/
current=Seeknext();
tcb[current].state=RUNNING;
/*切换堆栈,恢复线程i的现场,把CPU分派给它*/
_SS=tcb[current].ss;
_SP=tcb[current].sp;
if(timecount >= TC)
if(!DosBusy())
{
/*调用my_swtch进行重新调度*/
my_swtch();
}
}
void Destroy(int i)
{
if(tcb[i].state==RUNNING)
{
disable();
crit_err_ptr = MK_FP(segregs.ds,regs.x.si);
}
}
int DosBusy(void)
{
if(indos_ptr && crit_err_ptr)
return (*indos_ptr || *crit_err_ptr);
struct TCB *wq;
}semaphore;
semaphore mutex={1,NULL},empty={NBUF,NULL},full={0,NULL},Mutex2={1,NULL}; /*生产者消费者中的信号量*/
void InitDos(void)
{
union REGS regs;
#define NTCB 5 /*定义最大空闲TCB个数*/
#define TC 2 /*定义时间片长度*/
#define NBUF 6 /*定义缓冲区大小*/
#define GET_INDOS 0x34
#define GET_CRIT_ERR 0x5d06
struct TCB{
block(sem);
}
enable();
}
void signal(semaphore *sem)
{
disable();
sem->value = sem->value + 1;
if(sem->value <= 0)
wakeup(sem);
enable();
enable();
}
void wakeup(semaphore *sem)
{
struct TCB *p;
disable();
p = sem->wq;
if(p != NULL){
p->state = READY;
sem->wq = sem->wq->next;
tcb[i].sp = FP_OFF(temp);
return i;
}
void block(semaphore *sem)
{
struct TCB *p;
disable();
tcb[current].state = BLOCKED;
p = sem->wq;
if(p == NULL){
{
int i,ks;
i=current+1;
ks=0;
disable();
while(ks<NTCB)
{
if(tcb[i].state==READY)
{
return i;
}
i++;
ks++;
i=i%NTCB;
}
printf("Seeknext tcb is error!!\n");
i++;
if(i == NTCB) return -1; /*没有空闲TCB块可用*/
strcpy(tcb[i].name, name);
tcb[i].state = READY;
tcb[i].stack = (unsigned char*)malloc(stacklen); /*为新线程分配私有堆栈空间*/
tcb[i].stack = tcb[i].stack + stacklen;
/*初始化新线程的私有堆栈*/
temp = (struct int_regs *)tcb[i].stack-1;
temp->ds = _DS;
temp->es = _ES;
temp->flags = 0x200;
else if(_osmajor==3 && _osminor==0) crit_err_ptr = indos_ptr-1;
else{
regs.x.ax = GET_CRIT_ERR;
intdosx(®s,®s,&segregs);
#include<stdio.h>
#include<stdlib.h>
#include <time.h>
#include<dos.h>
/*定义TCB状态 */
#define FINISHED 0
#define RUNNING 1
#define READY 2
#define BLOCKED 3
}tcb[NTCB];
/*初始化堆栈时使用*/
struct int_regs{
unsigned bp, di, si, ds, es, dx, cx, bx, ax, ip, cs, flags, off, seg;
};
char fpub[3];
int current= -1; /*定义一个当前TCB下标的全局变量*/
tcb[i].state=FINISHED;
free(tcb[i].stack);
enable();
}
return;
}
void over(void)
{
Destroy(current);
printf("%s is finished!\n", tcb[current].name);