车载式施肥机肥量控制系统的性能探讨
自动化施肥控制系统的研究的开题报告
自动化施肥控制系统的研究的开题报告以下是自动化施肥控制系统的研究开题报告:一、选题背景随着现代农业的发展,农业生产技术不断更新,传统的人工施肥方式已经无法满足当今农业发展的需要。
自动化施肥控制系统应运而生,成为了现代农业生产中不可或缺的一部分。
自动化施肥控制系统能够实现对土壤、植物的精准、科学的施肥,提高农产品的品质、产量和效益。
二、研究目的本次研究旨在设计和开发一套自动化施肥控制系统,能够对农作物进行有效的施肥,提高农产品的品质和产量,同时减少施肥浪费和成本。
三、研究内容和方法本研究将主要从以下方面展开:1. 研究自动化施肥系统的组成和原理,包括传感器、执行器、控制器等硬件设备的选择和使用原理。
2. 研究不同作物在不同生长阶段的施肥需求,设计相应的施肥控制策略。
3. 针对同样的农作物,利用不同的施肥策略进行实验研究,并比较不同策略的施肥效果,确定最佳的施肥策略。
4. 设计施肥控制系统的软件程序,实现对系统的自动控制和管理。
四、预期成果1. 设计和制作一套功能完备、稳定可靠的自动化施肥控制系统原型。
2. 总结和比较不同的施肥策略,明确不同策略的优缺点,确定最佳的施肥策略。
3. 通过试验验证系统的施肥效果,并提出优化建议。
4. 撰写研究论文,发表在相关学术期刊上。
五、研究进度安排本次研究计划于2021年9月开始,预计于2022年6月完成,研究进度安排如下:1. 2021年9月-10月:研究自动化施肥系统的组成和原理。
2. 2021年11月-2021年12月:研究不同作物在不同生长阶段的施肥需求。
3. 2022年1月-2022年3月:设计和制作自动化施肥控制系统原型,并进行试验研究。
4. 2022年4月-2022年5月:分析试验数据,总结不同施肥策略的优缺点,提出优化建议。
5. 2022年6月:撰写研究论文,发表在相关学术期刊上。
六、研究意义本研究的成果将为现代农业生产提供一个高效、准确的施肥控制方案,可以大幅度提高农产品的产量和品质,同时节约施肥成本和减少污染物排放,对于实现农业现代化和可持续发展具有重要意义。
车载式撒肥机控制系统设计
车载式撒肥机控制系统设计摘要本文针对车载式撒肥机的控制系统设计进行了研究。
首先对撒肥机的工作原理进行了简要介绍,然后分析了撒肥机的控制要求和系统组成。
接着,阐述了控制系统的软件和硬件设计,包括主控板、传感器选择和通信协议设计等方面。
最后,通过实验验证了该控制系统的可行性和稳定性。
关键词:车载式撒肥机;控制系统;主控板;传感器;通信协议AbstractThis paper studies the design of the control system of a vehicle-mounted fertilizer spreader. Firstly, the working principle of the fertilizer spreader is briefly introduced, and then the control requirements and system composition of the fertilizer spreader are analyzed. Next, the software and hardware design of the control system are elaborated, including the selection of the main control board, sensor and communication protocol design. Finally, the feasibility and stability of the control system are verified through experiments.Keywords: vehicle-mounted fertilizer spreader; control system; main control board; sensor; communication protocol1. 引言撒肥机是现代化农业生产过程中的重要设备之一,广泛应用于农田施肥等作业过程中。
施肥机械的研究现状、现存问题及解决措施-农业机械化论文-农学论文

施肥机械的研究现状、现存问题及解决措施-农业机械化论文-农学论文——文章均为WORD文档,下载后可直接编辑使用亦可打印——引言施用化肥是实现农业高产、高效与粮食安全的重要保证,而化肥配制、施肥技术与施肥机械是施肥的三大支柱。
化肥配制在政府的大力支持下已经达到较为先进的水平,相比之下施肥技术与施肥机械的发展较发达国家落后。
技术与机械的落后不仅导致了施肥过程中的作物对化肥的吸收及利用效果差,而且会使得化肥不能被植物充分利用而造成土壤板结、水体富营养化等各种环境污染。
已有研究表明,受污染的水中超标氮与磷的大多数都来自于农业污染,其程度远远超过工业污染。
为了跟上国外农业的先进水平,使农业资源得以高效利用,加速我国农业的现代化进程,就必须改变施肥技术与施肥机械落后的现状,积极研发先进的施肥技术与高效的施肥机械并推广应用于我国现代农业,从而提高化肥的利用率,减少化肥所造成的农业污染。
1 施肥技术的研究现状与存在的问题施肥技术可使肥料按照一定的比例聚集在种子、农作物根系与叶面附近而被高效率吸收。
合理的施肥技术可使作物所需营养元素高效吸收,还可减少化肥的不当使用对农业生态环境造成的农业污染,更适应可持续发展的要求。
施肥技术分为很多种类,其中测土配方施肥技术、缓控释肥技术、变量施肥技术与灌溉施肥技术的应用研究较为普遍。
1.1 测土配方施肥技术的研究现状及存在的问题该技术是由测、配与供3 个环节顺序构成。
由于其综合效果好、可执行性强,需肥、施肥与供肥三者的矛盾可被协调并解决,故得以广泛应用与研究。
为了解决不同耕地需肥差异性以达到精确配方,唐秀美等提出将GIS 技术应用于施肥分区并通过与相应试验相联合可得出所需最优化肥配方比例,为配方比例的管理与决策提供了宝贵的理论依据与经验。
由于该技术具有强大的数据获取与处理、结果信息显示与分析功能,唐秀美等又对GIS 技术得到的营养元素含量分布图栅格划分,通过模拟分析计算可得到每个栅格的施肥量。
变量施肥机控制系统的研究的开题报告
变量施肥机控制系统的研究的开题报告
一、选题的背景和意义:
随着农业生产的发展,化肥的使用已经成为提高作物产量和质量的重要手段。
但是传统的施肥方式并不精确,存在浪费和污染等问题。
为了解决这些问题,变量施肥
机控制系统应运而生。
该系统通过采集农田中的土壤pH值、温度、湿度等信息,利用先进的控制算法自动调节施肥机的施肥量,实现精确施肥,提高农作物的利用率,减
少浪费和污染,提高农业生产效益。
二、研究的目的和内容:
本研究旨在设计一种基于单片机的变量施肥机控制系统,实现对土壤条件的实时监测和施肥机的智能控制。
具体研究内容包括:
1.确定变量施肥机控制系统的硬件和软件组成,搭建实验平台。
2.设计基于单片机的硬件电路,并通过编程实现控制算法和数据处理。
3.进行各种实验和测试,验证系统的性能和可靠性。
三、研究的方法和步骤:
1.文献调研,了解国内外变量施肥机控制系统的发展现状和研究成果,明确研究方向。
2.确定变量施肥机控制系统的硬件和软件组成,搭建实验平台。
3.设计基于单片机的硬件电路,包括传感器采集模块、控制模块、通信模块等。
4.编写控制算法和数据处理程序,实现智能施肥和数据分析功能。
5.进行系统的实验和测试,验证系统的性能和可靠性,并对结果进行分析和总结。
四、预期结果和意义:
本研究预期能够设计出一种基于单片机的变量施肥机控制系统,该系统实现了对农田土壤的实时监测和施肥机的智能控制,能够准确地根据土壤的情况调整施肥量,
提高农作物的利用率,减少化肥的浪费和污染,对于推广农业现代化、实现农业可持
续发展具有重要的实践意义和社会、经济效益。
智能施肥机自动控制系统的分析

工 作 研 究农业开发与装备 2019年第8期摘要:现阶段,中国在农业施肥技术研究上还存在很多不足之处,所使用的精密施肥装置多来自国外,价格十分昂贵。
对智能施肥机控制系统的设计情况进行总结,并从相关技术的合理应用、智能灌溉施肥控制技术的分析、总体设计方案、通讯设计四方面,论述了智能施肥机自动控制系统的主要分析内容。
关键词:智能施肥机;自动控制系统;总体设计0 引言在中国,除了秸秆还田之外,主要的施肥方式依然延用人工操作形式,不仅浪费了大量的劳动力,还容易对中国耕地造成极大影响。
由于人工施肥不能对施肥量进行合理化控制,甚至还会引发过量施肥等问题,引发水体和土地的污染。
所以说,中国需要强化对智能施肥机的设计研究,做到其自动控制系统的完善。
1 智能施肥机控制系统的设计情况1.1 自动控制系统的内容首先,在执行灌溉操作过程中,控制阀的有效操作,可以根据用户具体要求来进行,确保农作物始终处于最佳灌溉量状态。
其次,在具体施肥操作上,施肥控制阀的设定,可以根据实际需求来设定施肥频率,并将肥液灌溉到管道之中,并对管道中肥水的EC和pH值进行检测,确保上述两数值的合理性,并与作物生长相适应。
再次,通过压力机对管道压力进行实时检测,倘若压力高于管道的承受压力,工作人员需要将调压装置启动,如果长期处于高压状态,系统便会自动发出报警信息。
最后,对施肥管道中的流量进行合理化检测,并将具体的EC、流量以及压力值传输到上位机之中。
1.2 系统控制原理站在灌溉控制角度来说,主要是对灌水量进行全面控制,并制定出合理的灌水时间。
在具体施肥控制过程中,主要涉及到的内容有施肥量、灌溉液中肥料组成成分、酸碱度控制等等。
在整个肥水成分检验上,可以借助于EC值进行。
除此之外,在不同作物生长过程中,对于灌溉液pH值也存在很高要求,为了将其控制在有利的农作物生长范围之内,工作人员需要根据实际情况,向其中加入适当数量的pH值调节液,维护农作物的良好生长。
自动施肥机实验报告

自动施肥机实验报告自动施肥机实验报告引言:随着农业技术的不断发展,自动化设备在农田管理中的应用越来越广泛。
自动施肥机作为一种新型的农业设备,能够自动调控施肥量,提高农作物的产量和质量。
本文将对自动施肥机的原理、实验设计和结果进行详细的介绍和讨论。
一、自动施肥机的原理自动施肥机是一种基于先进的传感技术和控制系统的设备。
它通过感知土壤中的养分含量,根据作物的需求自动调整施肥量。
其主要原理包括以下几个方面:1. 传感器感知:自动施肥机通过植物生长传感器感知土壤中的养分含量和环境条件。
这些传感器能够测量土壤中的水分、氮、磷、钾等元素含量,并将数据传输给控制系统。
2. 控制系统:控制系统是自动施肥机的核心部件,它根据传感器获取的数据进行分析和处理,判断作物的需求量,并自动调整施肥机的工作参数。
通过控制系统,自动施肥机能够实现精确的施肥量控制。
3. 施肥装置:自动施肥机配备了专门的施肥装置,可以根据控制系统的指令进行精确的施肥操作。
施肥装置可以根据作物的需求量和土壤条件,选择合适的施肥方式和施肥剂。
二、实验设计为了验证自动施肥机的效果,我们进行了一系列的实验。
实验采用了盆栽种植方式,选取了常见的农作物作为研究对象。
实验的设计包括以下几个步骤:1. 样本准备:我们从同一批种子中选取了相同大小和生长状态的植物作为实验样本。
将它们分别种植在不同的盆中,并放置在相同的环境条件下。
2. 实验组设置:我们将实验样本分为两组,其中一组为对照组,不使用自动施肥机进行施肥。
另一组为实验组,使用自动施肥机进行施肥。
3. 施肥方案:我们根据作物的需求和土壤的养分含量,制定了合理的施肥方案。
对照组采用传统的施肥方式,实验组采用自动施肥机进行施肥。
4. 数据记录:在实验过程中,我们定期记录了植物的生长情况,包括株高、叶片数量和叶片颜色等指标。
同时,我们也记录了土壤的养分含量和环境条件。
三、实验结果经过一段时间的观察和数据分析,我们得出了以下实验结果:1. 作物生长情况:实验组中的植物生长状况明显优于对照组。
一种便于控制施肥量的农用施肥机_CN209359012U

(10)授权公告号 CN 209359012 U (45)授权公告日 2019.09.10
权利要求书1页 说明书3页 附图3页
CN 209359012 U
CN 209359012 ULeabharlann 权 利 要 求 书1/1 页
1 .一种便于控制施肥量的农用施肥机,包括底板(1),其特征在于,所述底板(1)两侧外 壁的两端均转动连接有移动轮(2),所述底板(1)顶部外壁一侧的两端均设置有固定杆(5), 且两个固定杆(5)相对的一侧外壁靠近顶部的位置均设置有固定板(6),且固定板(6)的顶 部外壁设置有电 动施肥控制器(7),所述底板(1)顶部外壁的 两侧均设置有支撑杆(17),且 两个支撑杆(17)的顶部外壁均设置有固定块(16),两个所述固定块(16)的一侧外壁均设置 有施肥箱(10),且施肥箱(10)顶部外壁的一侧开有进料口 ,所述进料口的一侧内壁铰接有 箱盖(13),所述施肥箱(10)的顶部内壁位于中间的位置开有沉孔,且沉孔的内壁焊接有轴 承,所述轴承的内壁转动连接有转动杆(15),且转动杆(15)的外壁焊接有等距离呈环形分 布的搅拌轴(11),所述搅拌轴(11)的外壁设置有等距离呈环形分布的破碎齿(14),所述施 肥箱(10)的底部外壁位于中间的位置开有排料口 ,且排料口的内壁焊接有施肥管(19),所 述施肥管(19)的外壁设置有电 磁阀(18),且电 磁阀(18)与电 动施肥控制器(7)之间呈电 性 连接。
2 .根据权利要求1所述的一种便于控制施肥量的农用施肥机,其特征在于,两个所述固 定杆(5)的一侧外壁靠近底部的位置均设置有防护板(4),且防护板(4)的一侧外壁设置有 等距离分布的弧形倒刺(3)。
3 .根据权利要求2所述的一种便于控制施肥量的农用施肥机,其特征在于,两个所述固 定杆(5)的顶部外壁均设置有推杆(8),且推杆(8)的外壁套接有防护套(9),防护套(9)的外 壁设置有等距离呈环形分布的凸块(20)。
农机农田施肥机械性能评价与标准化
农机农田施肥机械性能评价与标准化在现代农业生产中,农机的运用对于提高农田产量和农作物质量起到了重要的推动作用。
其中,施肥机械作为一种关键的农机设备,对农田施肥工作起着至关重要的作用。
然而,由于施肥机械的性能参差不齐,导致施肥工作的效果和效率存在较大的差异。
因此,对农田施肥机械的性能评价和标准化进行研究,对于提高农田施肥工作的质量和效率具有重要的意义。
一、农机农田施肥机械的性能评价1. 施肥效果评价农田施肥的关键目标是提高农作物的产量和质量。
因此,施肥机械的施肥效果成为评价其性能的重要指标之一。
施肥效果可以通过农田的实际产量和农作物的品质来进行评估。
同时,还需要考虑施肥机械对植物的生长和发育是否产生了不利的影响。
2. 施肥均匀性评价施肥的均匀性是指施肥机械在施肥过程中,施肥量的分布是否均匀。
施肥均匀性的评价影响着农作物的生长和产量。
均匀的施肥能够充分利用施肥剂,并减少资源的浪费。
因此,评价施肥机械的施肥均匀性对于提高农田施肥效率至关重要。
3. 施肥机械的使用安全性评价施肥机械的使用安全性是评价其性能的重要指标之一。
施肥机械在作业过程中需要与作业人员密切合作,因此使用安全的施肥机械具有重要意义。
评价施肥机械的使用安全性包括其结构强度是否合理、作业过程中是否存在安全隐患等方面。
二、农机农田施肥机械性能标准化1. 制定性能评价指标针对农机农田施肥机械的性能评价,应制定一套科学合理的评价指标体系。
这些指标应包括施肥效果、施肥均匀性、使用安全性等方面的指标,以保证评价结果的科学性和客观性。
2. 建立标准化体系为了提高农机农田施肥机械的性能,需建立完善的标准化体系。
标准化体系应包括技术标准、检验规范、质量管理体系等方面的要求,以确保农机农田施肥机械性能的可靠性和稳定性。
3. 推进标准化实施建立标准化体系只是第一步,更重要的是推进标准化实施。
相关部门应加强对标准化实施情况的监督和管理,确保标准化工作的顺利进行。
基于新能源汽车的智能农业设施控制系统优化研究
基于新能源汽车的智能农业设施控制系统优化研究随着农业现代化的发展和新能源汽车技术的成熟,新能源汽车在智能农业设施控制系统中的应用日益受到人们关注。
智能农业设施控制系统是指利用先进的信息技术、传感器技术和自动控制技术,实现对农业生产环境进行智能监测和控制的系统。
其优化研究对于提高农业生产效率、保障粮食安全、减少能源消耗具有重要意义。
首先,新能源汽车作为清洁能源车辆,具有环保、节能的特点,可以有效减少温室气体排放,减少对环境的污染。
因此,将新能源汽车与智能农业设施控制系统相结合,不仅可以为农业生产提供可靠的动力支持,还可以为农业生产过程中的能源消耗问题提供解决方案。
在实际应用中,新能源汽车可以通过太阳能、风能等清洁能源进行充电,然后应用于智能农业设施的运行,实现能源的循环利用和节约。
其次,智能农业设施控制系统的优化研究是提高农业生产效率和品质的重要手段。
通过对传感器技术和自动控制技术的不断创新和完善,可以实现对农作物生长环境的准确监测和精细化控制,保障作物的生长健康和产量稳定。
同时,智能农业设施控制系统的优化还可以实现对水肥用量的合理管理,避免水资源浪费和环境污染,提高农业生产的可持续性和资源利用率。
另外,新能源汽车的智能化发展也为智能农业设施控制系统的优化提供了技术支持。
通过引入人工智能、云计算、大数据等技术手段,可以实现对农业生产数据的智能分析和预测,为农业生产决策提供科学依据。
同时,新能源汽车的智能化管理和远程监控功能,也可以为农业生产过程中的实时监测和远程控制提供便利,提高生产管理的效率和精度。
让我们总结一下本文的重点,我们可以发现,具有重要的理论和实践意义。
通过充分发挥新能源汽车在农业生产中的优势作用,结合智能农业设施控制系统的先进技术,可以为农业生产的现代化和智能化发展注入新的动力和活力。
相信随着技术的不断进步和创新,基于新能源汽车的智能农业设施控制系统优化研究将为我国农业现代化进程和农业可持续发展做出更大的贡献。
农业科技中的智能化施肥与农业机械控制技术研究
农业科技中的智能化施肥与农业机械控制技术研究随着人口的增长和农业需求的增加,农业科技的发展变得尤为重要。
在现代农业中,智能化施肥与农业机械控制技术被广泛应用,以提高农业生产效率和减少资源浪费。
本文将探讨智能化施肥技术和农业机械控制技术的发展趋势,以及其对农业生产的影响。
智能化施肥是利用传感器和控制系统,根据土壤的营养状况和作物需求,精确计量并施加适量的肥料。
与传统的施肥方法相比,智能化施肥可以实现精准施肥,避免了过量使用肥料导致的环境污染和资源浪费。
智能化施肥技术的核心是利用传感器监测土壤中的养分含量,根据监测结果调整施肥量,并自动控制施肥设备的运行。
通过实时监测和调整,农民可以在最佳的施肥时间和施肥量上取得更好的控制,从而提高作物产量和质量。
智能化施肥技术的核心是数据的采集、传输和分析。
传感器可以通过测量土壤中的温度、湿度和养分含量来获取数据。
这些数据通过联网设备传输到云端服务器进行分析,并根据分析结果做出相应的控制策略。
智能化施肥系统可以根据作物的需求和生长阶段,精确计算施肥量,并实现肥料的均匀施放。
此外,智能化施肥还可以通过与气象数据的结合,预测天气变化和降雨情况,从而调整施肥方案,实现更加精准的施肥。
除了智能化施肥技术,农业机械控制技术也在农业生产中发挥重要作用。
农业机械控制技术可以实现对农机设备的自动化控制和监测。
通过应用自动控制技术,农机设备可以实现精确运转和作业,提高农业生产效率和减少人工劳动。
农业机械控制技术主要包括传感器、执行器和控制器的应用。
传感器可以监测农机设备的状态和环境变量,执行器可以控制设备的运动和作业,控制器则负责接收和处理传感器信息,并发出指令控制设备的运行。
农业机械控制技术的应用领域广泛,例如自动驾驶农机、精准植保机、智能灌溉系统等。
自动驾驶农机可以减少人工劳动,提高耕种效率。
精准植保机通过传感器监测作物的生长状况,根据监测结果调整农药喷洒量和喷洒位置,实现精确植保。
灌溉施肥自动控制系统的研究与开发
第42卷 第3期2008年3月西 安 交 通 大 学 学 报JOU RNAL OF XI AN JIAOTONG U NIV ERSITYVol.42 3M ar.2008灌溉施肥自动控制系统的研究与开发魏正英,葛令行,赵万华,卢秉恒(西安交通大学机械制造系统工程国家重点实验室,710049,西安)摘要:为了实现滴灌系统中灌溉与施肥的精确控制和同步进行,应用单片机控制与变频调节技术设计、开发了高精度的灌溉施肥自动控制系统,并通过硬件和软件的优化组合,进行了灌溉施肥自动控制系统的自主设计和制造.根据不同作物的不同需要,对灌溉液的电导率和酸碱度进行精确控制和实时调节,利用单片机技术开发了自动施肥控制系统,降低了系统成本.该系统采用模块化设计,其结构紧凑,使用简单,有利于推广使用.关键词:灌溉施肥;电导率;酸碱度;单片机;变频调节中图分类号:TM921.51;S224 22 文献标志码:A 文章编号:0253 987X(2008)03 0347 03 Development of Automatic C ontrol S ystem of Fertigation TechniqueWEI Zhengy ing,GE Ling xing,ZH AO Wanhua,LU Bingheng (State Key Lab oratory for M an ufacturin g Sy stem Engineering,Xi an Jiaoton g Un iversity,Xi an710049,China)Abstract:To accur ately control and sim ultaneously conduct o f irrigation and fer tilization in drip ir rigatio n sy stem,a hig hly intellig ent fertig ation system is developed based on sing le chip micro computer(SCM)co ntro l principles and variable frequency technique.Via the optim al co mbina tion o f hardw ar e and softw are,the equipment is fabricated,w here the electric conductivity and pH value can be accurately contr olled and real time regulated to m eet the v ar io us needs of differ ent cr ops.Utilizing SCM technique reduces the costs of the sy stem,w hile the structure becom es much compacted due to the modular desig n to efficiently prom ote.Keywords:fer tig ation;electric conductivity;pH value;single chip micro com puter;v ar iable fre quency r eg ulation灌溉施肥是通过施肥装置将溶解好的肥液注入到灌溉系统中,使肥料随灌溉水一起输送到田间的一种先进施肥方式,是精确施肥与精确灌溉相结合的产物.灌溉施肥的主要优点是施肥均匀、准确,可以稳定且高精度地控制灌水量、施肥量、施肥时间等参数,从而提高了水和肥的利用效率,有效地减轻了土壤和环境污染[1].在一些发达国家,如以色列、美国、加拿大等,自动化控制技术发展比较成熟,已开发了智能化程度和控制精度较高的智能灌溉施肥系统,而且得到了广泛的应用.我国与发达国家相比还有一定差距,一些研究所和高校进行了自动施肥控制系统的研究、开发,但大都局限在实验室研究阶段,还未开发出可以推广应用的高精度自动施肥控制系统[2 4].本文介绍了自主研制的自动施肥控制系统,并对系统管道结构、混合装置、检测反馈装置、控制面板进行了优化设计,从而提高了自动施肥控制系统的控制精度,系统结构也更加紧凑灵巧.1 自动施肥系统和装置1.1 自动施肥控制系统自动施肥控制系统(见图1)根据作物的实际需求,具有以下功能:!能够设定电导率(肥液浓度)、pH值、施肥时间和施肥时间间隔等参数;∀能够对收稿日期:2007 07 03. 作者简介:魏正英(1967-),女,教授. 基金项目:国家高技术研究发展计划资助项目(2006A A100208);新世纪优秀人才支持计划资助项目(N CET 06 0840);优秀博士论文基金项目(200740).图1 自动控制施肥系统结构图电导率和pH 值实时检测,并观测水和肥的流量;#可以对施肥施酸定时控制;∃根据作物所需对电导率和pH 值进行实时调控;%能够显示电导率、pH 值、施肥的开始时间、已施肥时间和施肥时间间隔等参数.肥液罐里的高浓度肥液经过初级过滤器由施肥泵注入到灌溉主水管道中,但进入主水管道之前须通过精密过滤器进行二级过滤.采用电导率测量仪检测主水管道中的肥液浓度,将检测得到的浓度值输入到单片机与设定值进行比较,根据差值信号通过变频器控制施肥电机的转速来调节施肥量,使管道中的肥液浓度值与设定值保持一致.酸碱度的调节与肥液浓度调节类似.在主水管道上安装了自主设计的混肥器,使肥液与灌溉水充分混合.自动施肥控制系统是独立于灌溉系统之外的一个模块,安装、维修比较方便,图1中虚线框的部分为可拆卸的自动施肥控制系统.1.2 施肥装置自动施肥控制系统通过控制肥液浓度和施肥时间来控制施肥量,其肥液浓度是由电导率来反映的.作物一般要求灌溉液的pH 值为6~6 5且呈弱酸性,但肥料溶于水后,则或呈碱性,或虽呈酸性但其酸度往往达不到要求.为了适应作物在不同生长期的需求,需单独专门向土壤中加入pH 调节液,即酸液或碱液[5].施肥施酸装置是自动施肥控制系统的动力设备.常用的注入方式有自压注入、文丘里注入、机械驱动注入和压差式注入.通过分析各种施肥装置的优缺点,本文选用可精确控制施肥量的机械驱动施肥装置[6],该装置利用电机驱动隔膜泵或柱塞泵把肥液注入到主水管道中,优点是能均匀准确地向灌溉管道注入肥液,从而使得灌溉水中的肥液浓度保持稳定.经综合考虑及性能比较,施肥泵选用具有良好防腐蚀性能的电动隔膜泵,考虑了压力损失及工作余量后,选取的隔膜泵的流量范围为0 5m 3/h,吸程为5m,扬程为30m.2 过滤装置和混肥装置肥液中所含的杂质主要是肥料溶解性不好产生的一些固体颗粒,本系统采用两级过滤.由于肥液罐中未溶解的颗粒会沉积在罐体底部,因此在肥液入口处选用粗过滤器(100目).在灌溉主水管道中,固体颗粒会影响整个灌溉系统的工作,在肥液进入主水管道前需选用200目的过滤器,再进行一次过滤.肥液在灌溉主水管道中与水混合不均匀会使检测系统的准确性降低,因此需要设计混肥装置,在此利用液体流动中遇到管道截面的突变时容易产生漩涡,且漩涡对液体有一定的混合作用的原理设计了漩涡混肥器,并安装在检测装置前,使肥液通过漩涡能够得到充分的混合,因此测得的电导率、pH 值将会更加准确、稳定(见图2和图3).图2 漩涡发生原理图3 混肥装置内部结构示意图3 检测装置及控制箱与操作面板自动施肥控制系统是一个闭环控制系统,稳定的肥液浓度是通过不断检测和实时调节实现的,检测调节原理如图4所示.根据作物所需要的肥量,在控制面板上设定肥液浓度或酸碱度及施入时间等参数,系统就会稳定地给灌溉主水管道注入肥液,实现灌溉与精确施肥同步进行.自动施肥控制系统的控制模块如图5所示,它348西 安 交 通 大 学 学 报 第42卷图4 电导率/pH 值检测反馈系统可以很好地控制肥液酸液的注入量,并能够进行实时监测.当电导率、pH 值发生偏离且超出许可范围时,单片机控制系统能够自动纠偏,判断故障,提供声、光报警并停止系统工作,其操作面板具有良好的人机界面,工作参数可在操作面板上动态地显示出来.为了使用方便,将操作面板设计成折叠式,如图6所示.图5 单片机控制系统总体框图4 自动施肥控制系统的管路布置图6所示为自动施肥控制系统装置的结构优化图.在一般工作条件下,施肥泵的流量为300L/h,流速V =0 06m /s .取管道直径D =40m m,计算出管道的总长度l =1 5m ,水的动力黏性系数 =0 1&10-5m /s ,Re =2400.根据莫迪图,可知管道沿程损失阻力为0 03,管道沿程压力损失为0 037kPa在自动施肥控制系统中,管路系统有出、入口直径相同的5个90∋弯头,2个三通,一个单向阀,根据管道局部压力和损失诺模图,可知90∋弯头的局部压力损失为3 2kPa,三通的局部压力损失为0 69kPa,单向阀的压力损失为2 838kPa,因此局部压力损失为0 28kPa.在自动施肥控制系统中,其管道系统的总体压力损失为4 28kPa ,由此可知,整个施肥装置管道的压力损失较小,优化后的结构比较合理.图6 优化设计的自动控制施肥系统5 结 论本文介绍了自动施肥控制系统,对系统管道的结构、混肥装置、检测反馈装置和控制面板进行的优化设计如下.(1)通过对流体力学性能的计算,得到了合理优化的管道结构.(2)混肥器使肥液与灌溉水能够更加充分地混合,因此改善了整个检测系统的准确性.(3)开发了单片机控制系统,降低了施肥装置材料的成本.(4)设计制作了更加人性化、可视化的控制面板,将整个施肥装置做成一个模块,不仅便于管理和维修,而且提高了设备的使用寿命.参考文献:[1] 朱志坚,卢秉恒,赵万华,等.机械注入式施肥装置研制与应用[J].节水灌溉,2003,21(2):21 22.ZH U Zhijian,L U Binheng ,ZH A O W anhua,et al.Develo pment and application of mechanical injecting fertig atio n device [J].Wat er Saving Ir rigation,2003,21(2):21 22.[2] SIL BER A,XU G.H ig h fer tig ation frequency:theeffects on uptake of nutrients,water and plant gr ow th [J].Plant and So il,2003,253(3):467 477.[3] 杨仁全,王纲,周增产,等.精密施肥机的研究与应用[J].农业工程学报,2005,21(12):197 199.Y AN G Renquan,W A N G Gang ,ZH O U Zeng chan,et al.R esear ch and applicatio n of pr ecise fertilizer appli cato r [J].T r ansactio ns o f T he Chinese So ciety o f A g r icultural Eng ineering ,2005,21(12):197 199.(下转第363页)349第3期 魏正英,等:灌溉施肥自动控制系统的研究与开发per imental inv estigation[J].International Journal ofH ydro gen Ener gy,1998,23(2):107 114.[9] K W AN G J,M ON T O Y A B,RA ZA NI A.M etal hydr ide co mpacts o f impr ov ed thermal conductiv ity[J].Internatio nal Jo ur nal o f H ydrog en Ener gy,2001,26(6):609 613.[10]程宏辉,陈德敏,杨柯.新型贮氢材料性能测试装置及其应用[J].稀有金属材料与工程,2007,36(1):7881.CH EN G H onghui,CH EN Demin,YA N G Ke.N ewty pe pro per ty measur ing apparat us and application fo rhydro gen stor age mater ial[J].Rare M etal M ater ialsand Engineer ing,2007,36(1):78 81.[11]程宏辉,陈德敏,杨柯.精确测定点阵参数的M A T L A B程序实现与应用[J].系统仿真学报,2005,17(增刊):98 100.CH EN G H o ng hui,CH EN Demin,Y A NG Ke.T heimplement and application of M atlab pro gr am of calculate the latt ice par ameters accur ately[J].Journal ofsystem simulation,2005,17(supplement):98 100. [12]L U N DIN C E,LY N CH F E,M agee C B.A cor relatio n bet ween t he interstitial ho le sizes in intermetalliccompounds and the thermo dy namic pro per ties o f t hehydrides for med fro m those co mpo unds[J].Jo urnal ofthe Less Common M etals,1977,56(1):19 37. [13]K IN G H W.Q uantitat ive size facto rs fo r metallic so lidsolut ions[J].Journal of M at erials Science,1966(1):79 90.[14]赵爽,林勤,陈宁,等 L aN i5-x M x合金氢化物贮氢性能的计算与预报[J].金属学报,1999,35(1):65 69.ZH AO Shuang,LI N Qin,CH EN Ning,et al.T he calculatio n and predictio n fo r hydro gen sto rag e pr oper ties o f La Ni5-x M x alloys[J].A cta M eta llur gica Sini ca,1999,35(1):65 69.[15]Y U X B,CH EN J Z,WU Z,et al.Effect o f Cr content on hydro gen sto rag e pro per ties fo r T i V basedBCC phase a lloys[J].International Journal o f Hy dr og en Energ y,2004,29(13):1377 1381.[16]余学斌,陈金舟,吴铸,等.Cr含量对T iM n1 2-xCr x V0 25F e0 05合金吸放氢性能的影响[J].金属学报,2004,40(5):527 530.YU Xuebin,CH EN Jinzhou,W U Zhu,et a l.Effect of Cr content o n the sor pt ion perfo rmance o f T iM n1 2-xCr x V0 25Fe0 05alloy s[J].A cta M et allur gica Sinica,2004,40(5):527 530[17]M A NI N,RA M A PRA BH U S Effect of substitutio nalelements on hy dr og en absor ption propert ies in M mbased A B5allo ys[J].Jo urnal of Allo ys and Com pounds,2004,363(1/2):275 291[18]O SU M I Y,K AT O A,SU ZU KI H,et a l.H ydro genabsor pt ion deso rption char acteristics of mischmetalnickel a luminum a llo ys[J].Jour nal of the L essCo mmon M etals,1979,66(1):67 75(编辑 管咏梅 赵大良)(上接第349页)[4] 鲁燕,何晓娥.我国精确农业发展现状及前景展望[J].农业装备技术,2004,30(3):22 24.L U Yan,H E X iao e.T he cur rent development and a prospect abo ut precision agr iculture in China[J].Equipment and T echno lo gy of A gr iculture,2004,30(3):22 24.[5] 李凯,毛罕平,李百军.实时施肥灌溉自动控制系统的研制[J].江苏理工大学学报,2001,22(1):12 16.L I K ai,M A O H anping,L I Baijun A n automat ic r eal time contr ol system o f fert ilization and ir rig atio n[J].Jour nal of Jiangsu U niv ersity of Science and T echnolog y,2001,22(1):12 16.[6] 李凯,毛罕平,李百军.混药混肥装置控制性能分析[J].农业机械学报,2003,34(1):50 53.LI K ai,M A O H anping,L I Baijun.A nalysis on con tr ol per for mance of var ious pesticide o r fertilizer mixers[J].T ransactions o f T he Chinese So ciety of A gr icultural M achiner y,2003,34(1):50 53.(编辑 管咏梅)363第3期 李慎兰,等:La1-x Y x Ni4 8M n0 2合金的贮氢性能研究。
施肥机的智能化测控系统
施肥机的智能化测控系统摘要:通过当前中国农业现状和智能化技术的发展,设计一个通过管路连接到灌溉系统的施肥机,通过控制肥水量来实现智能施肥,它能够执行比较精确的施肥过程,预防肥水使用不足或者过度的现象。
本设计的职能施肥机采用西门子S7-200系列PLC作为控制器,监控软件选用VB关键词:智能化;施肥机;PLC;VB农业发达的国家已经实现作物的自动施肥,为作物生长提供适宜的营养,而在我国这种技术发展还不是很成熟,还处于研发阶段,自动化程度比较低,应用的智能控制器比较少。
我国普遍应用的传统的施肥方式除肥料底施外,田间追肥多以地面撒施为主,劳动强度比较大而且量上不太好控制,肥料的实际利用率只有30%左右,肥料的渗透、挥发严重,既造成了生产资料的极大浪费,有污染了水源,空气和土壤。
国外的自动控制施肥系统大多施肥和灌溉一体化进行,借鉴这一技术,并考虑中国的现状,可将施肥机设计成为通过管道将肥水混成适合浓度滴灌施加给植物,他能够执行比较精确的施肥过程,按照用户的设置营养配比适量的施肥。
大大的提高利用率。
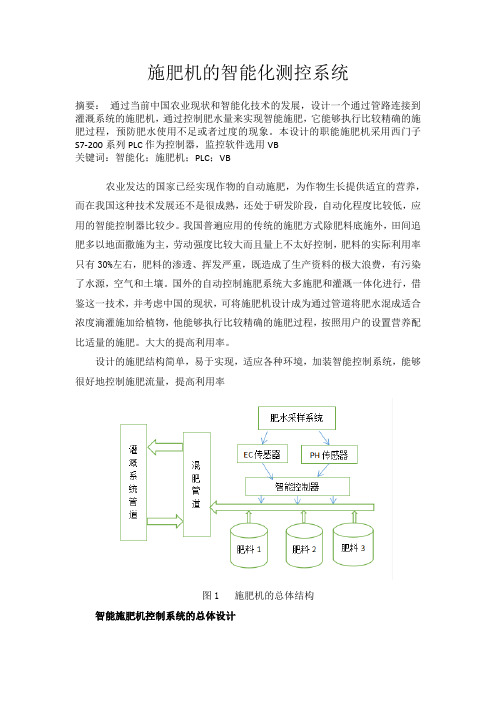
设计的施肥结构简单,易于实现,适应各种环境,加装智能控制系统,能够很好地控制施肥流量,提高利用率图1 施肥机的总体结构智能施肥机控制系统的总体设计本设计采用上下位机结构,上位机选用VB软件作为监控软件,下位机采用可编程逻辑控制器。
系统控制图如图2所示图2 施肥机控制系统图设计输入有EC值、PH值、流量、压力。
EC和PH值是系统主要控制参量和流量、压力一样都通过PLC的模拟输入模块采集进入下位机,这些参数在下位机进行处理,EC,PH值得变化控制施肥阀的动作频率,压力如果超出管道的承受范围则启动调压设备并报警。
设计控制部分输出有:电磁开关、调压开关、3路灌溉阀、3路施肥开关和肥料泵。
施肥机的运行操作的核心是PLC的控制下进行的。
上位机软件主要是显示设置参数、存储数据,观察设备运行状况等功能。
智能施肥机控制器的设计1)需要灌溉时,控制灌溉阀的打开和关闭,一边按照用户需求的灌溉方式和灌溉量实现给作物的灌水。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1
( 3 ) 方案 结构 应 简单 , 易 于实现 , 控 制 系统 一 般 要 求
( 1 ) 应能 根据 机 具 前 进 速度 和要 求 的施 肥 量 来 控制 相应 的对 象 ( 如位 移 、 转速) , 使 实 际的施 肥量 满
足农 艺要 求 ; ( 2 ) 该 系统应 具有 一定 的控制精 度 , 实 际施肥 量 与要 求施 肥 量 的差值 应在许 可 范 围 内;
第1 2 卷第1 期
2 0 1 3年 3月
杨 凌 职 业 技 术 学 院 学 报
J o u r n a l o f Ya n g l i n g Vo c a t i o n a l& Te c h n i c a l Co l l e g e
V0 1 . 1 2 No . 1
W ANG Bi n g - l i , ZH U Ru i — x i a n g 。
( 1 . Ya n g l i n g Vo c a t i o n a l a n d Te c h n i c a l C o l l e g e ,Ya n g l i n g,S h a a nx i 7 1 2 1 0 0,Ch i n a ; 2 . No r t h we s t S c i — t e c h Un i v e r s i t y o f Ag r i c u l t u r e a n d F o r e s t r y,Ya n g l i n g,S h a a n x i 7 1 2 1 0 0 , Ch i n a )
S t u d y o n t h e Fe r t i l i z e r Ca p a c i t y Co nt r o l S y s t e m o f
Ve hi c l e 。 mo u nt e d Fe r t i l i z i ng M a c hi n e
Ma r ., 201 3
车 载 式 施 肥 机 肥 量 控 制 系统 的性 能探 讨
王 兵利 ,朱 瑞 祥
( 1 . 杨凌职业技 术学院 , 陕 西 杨凌 7 1 2 1 0 0 ;2 . 西北农林科技大学 , 陕西 杨凌 7 1 2 1 0 0 ) 摘 要 : 通 过 对 步进 电 机 加 螺 旋 装 置 、 电 液伺 服 系 统 、 电动 推杆 、 直 流 比 例 电磁 铁 和 步 进 液 压 缸 五 种 控 制 系 统 进 行 比
Ke y wo r d s:f e r t i l i z i n g ma c hi ne;c o nt r ol s ys t e m ;a c c u r a c y;va r i a b l e r a t e f e r t i l i z a t i o n
肥量 控 制系 统 是施 肥 机 的重 要 构 成 部 分 , 肥 量
2 . 1 步进 电机加 螺旋 装置 目前 大 多数施 肥机 采用 的摆 杆 阀 门式 肥料 施撒
控制 系统 的合 理设 计 在一定 程 度上 决定 了肥 料施 撒 的均 匀性 及精 确度 。
装置, 结 构示 意 图 如 图 1所 示 , 当采 用 矩 形 阀 门时
( 如 图 2所 示 ) :
Ab s t r a c t : Th r o u g h t h e c o mp a r i s o n o f f i v e k i n d s o f c o n t r o l s y s t e ms ,t h a t i s ,t h e s t e p p i n g mo t o r a n d s c r e w d e v i c e ,e l e c t r o — h y — d r a u l i c s e r v o s y s t e m ,e l e c t r i c p u t t e r ,DC p r o p o r t i o n a l e l e c t r o ma g n e t a n d s t e p p i n g h y d r a u l i c c y l i n d e r ,t h e r e s u l t s h o ws t h a t t h e e l e c t r o — h y d r a u l i c s e r v o s y s t e m i s mo r e s i mp l e a n d c o n v e n i e n t ,wi t h h i g h p r e c i s i o n,f a s t r e s p o n s e ,l o n g s e r v i c e l i f e ,a n d r e l a t i v e — l y l o w c o s t ,s u i t a b l e f o r a p p l i c a t i o n i n a g r i c u l t u r a l p r o d u c t i o n .
较, 电液 伺 服 系统 简便 易 行 , 控制精度 高 , 响应速度快 , 使用寿命长 , 成 本 相对 较低 , 适 合 在 农 业 生 产 中推 广 应 用 。
关键词 : 施肥机 ; 控制系统 ; 精 确度 ; 变 量 施 肥
中图分类号 : ¥ 2 2 4 . 2 文献标识码 : A 文章编号 : 1 6 7 1 - 9 1 3 1 ( 2 0 1 3 ) 0 1 — 0 0 1 1 - 0 4