DOOPA设备技术参数
广播音响设备

室外音柱
8
350
2800
金迈视讯628 (豪华铝合金防水音柱,60W)
10机柜190090016U豪华型机柜
11
线材
1
5000
5000
广播音响工程线
12
施工费用
1
3000
3000
13
音响
4
1600
6400
MECK-230额定功率160瓦
13-19为会议室音响
14
功放
1
2200
2200
HENTR MP800 2*350瓦
15
调音台
1
1200
1200
HENTR SC-602 6路立体声
16
会议麦克风
2
370
740
SANHE 701高精准,双咪头
17
无线胸麦
3
1200
3600
BAOMIE 908 U段,一拖二
18
线材及插件
1
400
400
秋叶原专用线缆,甬声接头,音响吊架等
19
机柜
1
650
650
16U豪华型机柜
合计
56210
1-12项为校园广播系统
2
主控软件
1
2300
2300
DOOPA控制软件/音乐库/编辑软件/控制卡
3
卡座
1
450
450
奇声-398
优质循环放音机芯,具有连续循环和单循环双重放音方式;常倍速磁带复制;带录、放音补偿系统,双卡座。
4
前置放大器
1
3200
3200
金迈视讯GM-8601A
EVDO系统详解

第一章EVDO 概述 (1)1.1 引言 (1)1.2 EVDO 的功能要求 (2)1.3 EVDO 的设计思想 (2)1.3.1 时分复用 (3)1.3.2 多用户调度 (4)1.3.3 链路自适应 (4)1.3.4 HARQ (4)1.3.5 速率控制 (5)1.4 EVDO 网络结构 (6)1.4.1 网络构成及其基本功能 (6)1.4.2 网络接口协议及其功能 (7)1.5 EVDO 的发展情况 (8)1.5.1 标准化进展 (8)1.5.2 商用进展 (9)1.5.3 市场前景 (9)第二章EVDO 空中接口 (11)2.1 空中接口概述 (11)2.1.1 空中接口协议栈模型 (11)2.1.2 空中接口协议通信方式 (13)2.1.3 空中接口信息传送方式 (13)2.2 物理层 (15)2.2.1 前向信道 (15)2.2.1.1 前向信道划分 (15)2.2.1.2 前向信道的时隙结构 (16)2.2.1.3 前向信道的标识 (16)2.2.1.4 前向信道的物理结构 (19)2.2.1.5 前向业务/控制信道的参数配置和时隙复用 (22)2.2.2 反向信道 (25)2.2.2.1 反向信道划分 (25)2.2.2.2 接入信道物理结构 (26)2.2.2.3 反向业务信道物理结构 (28)2.2.2.4 反向信道调制参数 (33)2.2.2.5 长码生成与同步 (34)2.3 MAC 层 (34)2.3.1 MAC 层协议功能 (34)2.3.2 MAC 层地址匹配 (34)2.3.3 控制信道MAC (36)2.3.3.1 控制信道MAC 层数据封装 (36)2.3.3.2 控制信道MAC 的传送方式 (37)2.3.4 接入信道MAC (38)2.3.4.1 接入信道MAC 层数据封装 (38)2.3.4.2 接入探针的结构 (39)2.3.4.3 接入探针序列的结构 (40)2.3.4.4 接入过程 (41)2.3.4.5 接入信道长码掩码 (42)2.3.4.6 接入信道MAC 层主要消息及其关键参数 (42)2.3.5 前向业务信道MAC (43)2.3.5.1 前向业务信道MAC 层数据封装 (43)2.3.5.2 前向业务信道MAC 协议状态转移流程 (44)2.3.6 反向业务信道MAC (46)2.3.6.1 反向业务信道MAC 层数据封装 (46)2.3.6.2 反向业务信道速率控制 (47)2.3.6.3 反向链路静默 (49)2.3.6.4 反向业务信道长码 (49)2.3.6.5 反向业务信道MAC 层主要消息及其关键参数 (49)2.4 安全层 (50)2.4.1 安全层协议功能 (50)2.4.2 安全层数据封装 (50)2.4.3 安全矢量 (51)2.4.4 密钥交换 (51)2.4.5 空口鉴权 (53)2.4.6 加密 (54)2.5 连接层 (54)2.5.1 连接层状态机 (55)2.5.2 连接管理 (57)2.5.2.1 连接建立 (57)2.5.2.2 连接关闭 (57)2.5.3 路径更新 (58)2.5.4 分组合并 (58)2.5.5 开销消息管理 (58)2.6 会话层 (59)2.6.1 协议交互 (59)2.6.2 地址分配 (61)2.6.2.1 UATI 的构成 (61)2.6.2.2 UATI 的分配 (62)2.6.2.3 UATI 与移动性管理 (62)2.6.3 配置协商 (62)2.7 流层 (63)2.8 应用层 (64)2.8.1 缺省信令应用 (64)2.8.1.1 信令网络协议 (64)2.8.1.2 信令链路协议 (65)2.8.2 缺省分组应用 (66)2.8.2.1 无线链路协议 (66)2.8.2.2 位置更新协议 (69)2.8.2.3 流控协议 (70)2.9 EVDO 空中接口关键技术 (71)2.9.2 HARQ (72)2.9.3 多用户调度 (73)2.9.3.1 多用户调度准则 (73)2.9.3.2 比例公平调度算法 (74)2.9.4 速率控制 (75)2.9.4.1 前向链路速率控制 (75)2.9.4.2 反向链路速率控制 (76)2 功率控制 (77)2.9.5.1 前向链路功率分配原理及实现 (77)2.9.5.2 反向链路功率控制原理及实现 (78)2.9.6 虚拟软切换 (79)第三章EVDO IOS 功能介绍 (80)3.1 功能概述 (80)3.1.1 参考模型 (80)3.1.2 主要作用 (80)3.1.2.1 在接入鉴权中的作用 (81)3.1.2.2 在移动性管理中的作用 (81)3.1.2.3 在数据传送中的作用 (81)3.2 A8/A9 接口功能 (82)3.2.1 A8 连接建立 (82)3.2.2 A8 连接重激活 (83)3.2.3 A8 连接释放 (83)3 A8 连接参数更新 (84)3.2.5 A9 接口消息的定时器参数 (85)3.3 A10/A11 接口功能 (85)3.3.1 A10 连接建立 (85)3.3.2 A10 连接释放 (86)3.3.3 计费信息传送 (87)3.3.4 A11 接口消息的定时器参数 (87)3.4 A12 接口功能 (87)3.5 A13 接口功能 (88)第四章EVDO 数据呼叫流程 (90)4.1 分组数据会话状态 (90)4.2 HRPD 会话建立、维持与关闭 (91)4.2.1 HRPD 会话建立 (91)4.2.2 HRPD 会话维持 (92)4.2.3 HRPD 会话关闭 (92)4.2.3.1 AT 发起HRPD 会话关闭(存在A8 连接) (92)4.2.3.2 AT 发起HRPD 会话关闭(不存在A8 连接) (93)4.2.3.3 AN 发起HRPD 会话关闭(存在A8 连接) (94)4.2.3.4 AN 发起HRPD 会话关闭(不存在A8 连接) (94)4.3 接入鉴权 (95)4.4 位置更新 (96)4.4.2 AN 发起位置更新 (97)4.5 HRPD 连接建立 (97)4.5.1 AT 发起HRPD 连接建立 (98)4.5.2 AT 发起HRPD 连接重激活 (99)4.5.3 PDSN 发起HRPD 连接重激活 (100)4.6 HRPD 连接释放 (101)4.6.1 AT 发起HRPD 连接释放 (101)4.6.2 AN 发起HRPD 连接释放 (102)4.6.3 PDSN 发起HRPD 连接关闭 (102)4.7 EVDO 子网切换 (103)4.7.1 相同PCF 下不同AN 之间的休眠切换 (103)4.7.2 相同PDSN 下不同PCF 之间休眠切换 (104)4.7.3 不同PDSN 之间休眠切换 (106)第五章EVDO 网络安全机制 (108)5.1 EVDO 网络安全概述 (108)5.2 空口安全机制 (108)5.3 接入鉴权 (109)5.3.1 基于MD5 算法的鉴权方式 (110)5.3.2 基于CA VE 算法的鉴权方式 (111)5.4 核心网鉴权 (113)5.5 核心网数据保护 (115)第六章EVDO QoS 机制 (116)6.1 引言 (116)6.2 QoS 评价指标 (116)6.3 QoS 服务模型 (117)6.4.1 IntServ 服务模型 (117)6.4.2 DiffServ 服务模型 (118)6.4.3 IntServ 和DiffServ 相结合提供端到端的QoS 保证 (119)6.5 端到端的QoS 体系结构 (120)6.5.1 端到端的QoS 机制 (120)6.5.2 IP QoS 机制 (121)6.5.3 承载层与传送层QoS 机制 (121)6.6 EVDO QoS 实现机制 (122)6.6.1 EVDO QoS 简介 (122)6.6.2 EVDO Rel 0 的QoS 实现机制 (123)6.6.3 EVDO Rev A 的QoS 机制 (123)6.6.3.1 前向链路QoS 实现机制 (123)6.6.3.2 反向链路QoS 实现机制 (125)第七章EVDO 系统性能分析 (126)7.1 EVDO 链路覆盖分析 (126)7.1.1 EVDO 链路覆盖影响因素 (126)7.1.1.1 有效全向发射功率 (127)7.1.1.2 接收机灵敏度 (128)7.1.1.3 接收天线增益与接收端损耗 (129)7.1.1.4 衰落余量 (130)7.1.1.5 软切换增益 (130)7.1.1.6 分集增益 (131)7.1.1.7 地物穿透损耗 (131)7.1.2 EVDO 前向链路预算 (131)7.1.3 EVDO 反向链路预算 (134)7.1.4 EVDO 系统前反向覆盖差异性分析 (135)7.1.5 EVDO 与CDMA2000 1x 系统前反向覆盖比较 (137)7.2 EVDO 系统容量分析 (138)7.2.1 EVDO 系统容量影响因素分析 (139)7.2.2 EVDO 前向容量分析 (139)7.2.2.1 链路开销影响分析 (139)7.2.2.2 多用户调度影响分析 (140)7.2.2.3 HARQ 影响分析 (142)7.2.2.4 速率控制影响分析 (146)7.2.3 EVDO 反向容量分析 (147)7.2.4 EVDO 前反向容量差异性分析 (148)7.2.5 EVDO 与CDMA2000 1x 前反向容量比较 (149)7.3 EVDO 链路覆盖和系统容量前反向受限分析 (150)第八章EVDO 组网与混合终端操作 (152)8.1 组网方式 (152)8.1.1 单独组网 (152)8.1.2 混合组网 (152)8.1.2.1 升级组网方案 (153)8.1.2.2 叠加组网方案 (154)8.2 混合终端操作 (156)8.2.1 混合终端设置 (156)8.2.2 混合终端选网 (156)8.2.2.1 在接入层面上选网 (156)8.2.2.2 在应用层面上选网 (157)8.2.2.3 开机选网 (158)8.2.3 两网切换 (159)8.2.3.1 混合覆盖区内的切换 (159)8.2.3.2 混合覆盖区边缘的切换 (164)第九章EVDO 网络规划和优化 (168)9.1 CDMA 网络规划和优化的基本功能概述 (168)9.2 CDMA 网络规划的准则/要求/流程 (168)9.2.1 CDMA 网络规划的准则 (168)9.2.2 CDMA 网络规划的要求 (169)9.2.2.1 合理选择天线类型和天线挂高 (169)9.2.2.2 明确覆盖目标和覆盖区域 (170)9.2.2.3 话务量分布 (171)9.2.2.4 地理形态特性 (171)9.2.3 CDMA 网络规划的流程 (172)9.2.3.1 设计准备 (172)9.2.3.2 初步设计 (172)9.2.3.3 最终设计 (173)9.3 CDMA2000 1x 网络规划 (173)9.3.1 覆盖规划 (173)9.3.2 PN 规划 (174)9.3.3 切换规划 (175)9.3.4 功率规划 (176)9.3.5 登记区域规划 (176)9.3.6 其他特点 (177)9.4 混合组网时的EVDO 网络规划 (177)9.4.1 EVDO 网络规划的技术特点 (177)9.4.2 EVDO 网络规划的特殊要求 (178)9.4.3 影响EVDO 网络规划的特殊因素 (179)9.4.3.1 话务模型对EVDO 网络规划的影响 (179)9.4.3.2 技术发展对EVDO 网络规划的影响 (179)9.5 混合组网时的EVDO 网络优化 (179)9.5.1 EVDO 网络优化的必要性 (179)9.5.2 EVDO 网络优化的基本准则 (180)9.5.3 EVDO 网络性能的评价指标 (181)9.5.3.1 覆盖评价 (181)9.5.3.2 容量评价 (181)9.5.4 EVDO 网络优化的方法和流程 (182)9.5.4.1 优化准备 (182)9.5.4.2 优化条件 (183)9.5.4.3 基于路测的优化 (183)9.5.4.4 基于话务统计的优化 (185)9.5.5 EVDO 优化流程 (187)9.6 EVDO 网络关键性能指标分析 (188)9.6.1 数据吞吐量影响因素分析 (188)9.6.1.1 无线覆盖弱 (189)9.6.1.2 导频污染 (190)9.6.1.3 邻区设计不合理 (191)9.6.1.4 PN 设计不合理 (192)9.6.1.5 搜索窗设计不合理 (193)9.6.1.6 其它因素 (193)9.6.2 数据呼叫建立成功率和掉话率影响因素分析 (194)9.6.2.1 反向链路过载 (195)9.6.2.2 最大连接数限制 (196)9.6.2.3 接入鉴权失败 (196)9.6.3 切换性能分析 (197)9.6.3.1 空闲切换 (197)9.6.3.3 硬切换 (197)第十章EVDO Rel A 介绍 (199)10.1 EVDO Rel 0 功能限制 (199)10.2 EVDO Rev A 的设计目标 (199)10.3 EVDO Rev A 空中接口新增功能 (200)10.3.1 应用层新增功能 (200)10.3.2 流层新增功能 (201)10.3.3 会话层新增功能 (201)10.3.4 连接层新增功能 (202)10.3.5 安全层新增功能 (202)10.3.6 MAC 层新增功能 (203)10.3.7 物理层新增功能 (204)10.3.7.1 物理信道改动 (205)10.3.7.2 链路速率和系统容量的提高 (206)10.3.7.3 切换能力的增强 (206)10.3.7.4 反向链路的分组重传 (206)10.3.7.5 业务QoS 的增强 (208)10.4 Rev A 对A 接口和核心网的要求 (209)10.5 Rev A 对网络设备的技术要求 (209)10.6 Rev A 的进一步发展 (210)参考文献 (211)缩略语 (215)第一章EVDO 概述1.1 引言迄今为止,现代商用蜂窝移动通信系统已发展至第三代。
OTCCPVM350500焊机介绍_OK

OTCCPVM350500焊机介绍_OK
OTCCPVM350焊机是一款高性能的焊接机械。
它采用了最新的数字化
控制技术,能够实现高精度的焊接效果。
该焊机的焊接电流范围广泛,可
根据具体需求调整,使焊接能力更加灵活。
而且,它还具备自动控制功能,可以根据焊接工艺的要求进行自动调整,提高焊接效率和质量。
另外,CPVM350还具备多种焊接模式,用户可以根据不同的焊接需求选择合适的
模式,从而实现更加精准的焊接。
OTCCPVM500焊机是一款更加高性能和多功能的焊接机。
它采用了先
进的电子技术和控制系统,具备更高的焊接精度和稳定性。
焊接电流范围
更广,可调节范围更大。
此外,CPVM500还具备更多的焊接模式和功能,
如脉冲焊接、双极性焊接、速度控制等,可以满足更多复杂焊接工艺的要求。
同时,该焊机还支持远程控制和故障诊断功能,可以通过遥控器进行
操作和监控,方便用户进行维护和管理。
无论是CPVM350还是CPVM500,它们都采用了先进的电子技术和控制
系统,能够实现高精度和高效率的焊接。
它们适用于各种焊接工艺,如手
动焊接、自动焊接或机器人焊接等。
同时,它们也非常适合在工业生产中
使用,可以满足不同焊接需求的要求。
此外,这两款焊机还具有结构紧凑、便于携带的特点,方便用户在不同场合进行操作和使用。
总之,OTCCPVM350和CPVM500都是优秀的焊接机械,具备高性能、
多功能和使用便捷的特点。
无论您是从事焊接工作还是需要进行焊接维修,这些焊机都能够为您提供满意的焊接体验。
duo200产品说明书范文
DUO200说明书1、产品介绍DUO200是一种高性能的微机控制双鉴探测器,他基于两种物理现象,即由人体发出的红外线和人在微波领域内活动产生的多普勒效应。
两种技术组合应用能够互相填充从而保证可靠的探测并防范误报警。
DUO200优于其他双鉴探测器之处在于采用了真实动作辨析系统,这种高级动作解析方法为UDO200供应了差别人的动作和其他可以致误报警搅乱的能力。
DUO200另一个独到的特点是采用了微波摸拟系统,他模拟了人在微波地域中活动产生的影响,这种模拟程序周期执行,可达到自测、监察并保证微波探测的正确工作。
2、规格输入电压:9—16VDC耗电:大体23mA@12VDC精美红外面分(参看视图2)探测器:低噪音双电子热效应感觉器跳闸指示:绿灯闪烁5秒动作计数:可选1或2个动作镜头数据光辉数量:34视角地域:90度最大覆盖区:12*12m垂直赞同:+2度—-12度经过沿角度滑动系统板获得微波部分发生器:微回路静态损坏型频率:美国在英国和欧洲跳闸指示:绿灯发光5秒范围:3m到12m报警、保护和故障数据报警指示:若是所有探测器跳闸,则红灯亮到5秒继电器:常闭,串接18欧姆电阻报警连续:到5秒(红灯亮并且输出继电器打开)防拆继电器:常闭故障输出:三极管导通,最大100mA,串接100欧姆电阻外形尺寸:(高*宽*厚)104*60*32mm重量:80克固定直接:没有附加的支撑直接固定在墙的表面或墙角附件BR-1:表面固定支撑,赞同愿下 30度左右45度调整1BR-2:在BR-1基础上加墙角般配器BR-2:在BR-1基础上加天棚般配器环境条件工作温度:-10度—50度积蓄温度:-20度—60度射频保护:高出30v/m(20MHz—2000MHz) 专利专利号:5,237,3305,693,943Des346,5673、安装3.1安装指南在选择固定地址时必定注意几点重要规则:、微波射线可穿过玻璃和非金属墙,确定微波地域不会高出房间限制。
安立8000a技术参数

安立8000a技术参数1.引言1.1 概述安立8000a是一款先进的技术设备,拥有卓越的性能和功能。
它采用了最新的技术和设计理念,为我们带来了全新的使用体验。
在本文中,我们将详细介绍安立8000a的技术参数,包括其概述、主要功能特点以及对技术参数的应用前景展望。
通过本文的阅读,您将能够更加全面地了解安立8000a,并为您购买、使用该设备提供参考和指导。
在接下来的章节中,我们将逐一阐述每个方面的内容,使您对安立8000a的技术参数有一个更加清晰的认识。
同时,我们还将展望安立8000a技术参数的应用前景,为您提供更多的思考和参考。
在阅读本文之前,请您确保已经熟悉相关的技术知识和术语,以便更好地理解和掌握本文中的内容。
希望本文能够对您有所帮助,为您了解和使用安立8000a提供有益的信息。
1.2 文章结构文章结构部分主要介绍了本文的组织结构和各个章节的内容,以便读者能够清晰地了解文章的整体框架和内容安排。
文章结构如下:1. 引言:本部分旨在对文章的背景和目的进行概述,为读者提供阅读的引导。
2. 正文:2.1 技术参数概述:该部分将对安立8000a的技术参数进行全面概述,包括主要性能指标、功能特点等。
2.2 主要功能特点:该部分将详细介绍安立8000a的主要功能特点,包括但不限于性能优势、适用领域、创新设计等。
3. 结论:3.1 总结技术参数:该部分将对安立8000a的技术参数进行总结,概括出其主要优势和特点,为读者提供一个全面的概览。
3.2 对技术参数的应用前景展望:该部分将对安立8000a的技术参数应用前景进行展望,探讨其在相关领域的应用前景、发展趋势等。
通过以上结构的安排,本文将以清晰明了的方式,全面且有条理地介绍安立8000a的技术参数,使读者能够更好地理解和掌握相关内容。
1.3 目的本篇文章的目的是对安立8000a的技术参数进行详细的介绍和分析。
通过了解安立8000a的技术参数,我们可以了解到该设备的性能和特点,进而评估其在实际应用中的优势和局限性。
OPA简介
6.最大差模输入电压 (maximum differential mode input voltage):运放两输入端能承受 的最大差模输入电压,超过此电压时,差分管 将出现反向击穿现象。RAIL TO RAIL ? 7.最大共模输入电压 (maximum common mode input voltage):在保证运放正常工作 条件下,共模输入电压的允许范围。共模电 压超过此值时,输入差分对管出现饱和,放 大器失去共模抑制能力。
三 低功耗型运算放大器
由于电子电路集成化的最大优点是能使复杂电路小型轻便,所 以随着便携式仪器应用范围的扩大,必须使用低电源电压供电、 低功率消耗的运算放大器相适用。
随着电池供电设备的激增,静态电流仅1μA(或更 低)的低功耗运算放大器变得日益普及。为了保持 低消耗电流,必须选择具有兆欧(MΩ)级阻值的反 馈网络电阻器,这有可能影响放大级的噪声和准确 度指标。放大器负载电流也会使总消耗电流有所增 加。这些超低供电电流放大器的运算速度一般都非 常慢(低带宽),适合于速度较慢的信号。由于其功 耗很低,所以输出电流受到限制,从而导致其容性 负载驱动能力下降。极低功耗运算放大器的噪声电 平较高,因而极大地限制了其在高精度应用中的推 广使用。实现极低功耗的另一个办法是采用启动 (停机)功能来开启和关断放大器。最终的极低功耗 解决方案同时需要低功耗和停机功能,才能实现数 年的连续工作。
一 运算放大器的分类
五 低噪声运算放大器
许多高性能应用都要求低噪声。在运算放大 器的噪声规格中,设计师们往往只把注意力 放在了“电压噪声”上,他们认为电压噪声 是产生放大器噪声的主要根源。然而,运算 放大器的总体噪声性能取决于各噪声源(电 压噪声和电流噪声)的综合作用。运算放大 器的电流噪声在经过电路阻抗时会产生电压 噪声。而且,电阻器本身还具有一个与其阻 值的方根成正比的固有热噪声。对低噪声的 追求可能会使设计师走入歧途。噪声最低的 运算放大器采用的是双极型输入晶体管(而 不是CMOS型或JFET型晶体管),为此付出 的代价是噪声电流有所增加。为了得到低噪 声电压的好处,就必须保持较低的电路阻抗。
欧能全电动堆高机参数

EY1516EY1525/1529/1533EY1540EY1540EY1545EY1552额定载重kg 载荷中心mm 到顶限重kg15001500/1250/1000700900700550操纵方式门架起升后高度系列mm 1600(单)2500/2900/3300(双)4000(双)4000(三)4500(三)5200(三)下降后货叉距地高度mm 转弯半径mm 车身总长(无/有踏板)mm 车身总宽mm 车身静止高度mm 19751785/1985/21852535195021402380门架起升后高度mm 19752990/3390/37904650465051505940标准货叉尺寸mm 货叉外宽mm 600货叉内宽mm 280行驶速度(满载/空载)km/h 提升速度(满载/空载)mm/s 下降速度(满载/空载)mm/s 爬坡度(满载/空载)%制动方式驱动轮mm 驱动轮型式承载轮mm 平衡轮mm 驱动电机kw 提升电机kw 蓄电池V/Ah控制类型自重(含电池)kg750850/880/9101000110011501200主要配置:卧式驱动轮;德国型钢门架;美国CURTIS1207电控系统(含接触器,加速器);瑞士BUCHER 泵站总成;进口多路阀;意大利国内独资油缸;小时计,电量表;附智能充电机。
可选配:德国原装控制手柄;护栏,踏板;电池箱侧开门;交流控制系统。
保修期限:壹年,易耗品除外。
(保修条件:非人为及自然因素损坏)。
项目单位 1.22.22.524V/210Ah CURTIS 1207串励控制电磁制动Ø250*80卧式Ø80*70Ø156*50Ø156*754月6日 3.5/5.580/13070/120110/905月8日4月6日1150*160*701150*180*7056068524032590153017301880/23302000/25508501000东莞鑫杰欧能全电动堆高机参数详细信息:规格1500600步行式/站架式。
型号及技术参数(精)
型号及技术参数:一、音响系统序号设备名称技术参数单位数量1 双15寸全频主扩音箱频率响应50Hz-20KHz(±4dB)/40Hz-22KHz(-10dB)灵敏度(1W/1m) 100dB(60Hz-20KHz)标称阻抗4ohm额定功率700W(AES)峰值功率1400W分频点2.0KHz低音单元2×15″Woofer(3″voicecoil)高音单元1*1″标称覆盖角80 °(h)*50°(v)最大音压级128db spl,134dbsplpeak尺寸H*W*D 1017*508*500(mm)连接插座2neutrik nl4mp connectors吊架硬件Fiying points只 22 双18寸超低频音箱频率响应35-260Hz(±4dB)/28Hz-1KHz(-10dB)灵敏度(1W/1m) 105dB(50-150Hz)标称阻抗4ohm额定功率1200W(AES)峰值功率2400W分频点2.2KHz低音单元2×18″Woofer(3″voicecoil)最大音压级136db spl,142dbsplpeak 尺寸H*W*D 900*580*600(mm)连接插座2neutrik nl4mp connectors只 23 返送音箱频率响应80Hz-20KHz(±4dB)/35Hz-22KHz(-10dB)灵敏度(1W/1m) 97dB(200Hz-20KHz)标称阻抗8ohm额定功率250W(AES)峰值功率500W分频点2.0KHz低音单元1×12″Woofer(2.5″voicecoil)高音单元1*1″标称覆盖角90°(h)*60°(v)最大音压级121db spl,127dbsplpeak 尺寸H*W*D 635*370*355(mm)连接插座2neutrik只 24 主扩专业功放技术规格额定功率(RMS) 立体声8Ω 800W×2 (.03%THD+N)立体声4Ω1200W(.03%THD+N)立体声2Ω 1600W (.03%THD+N)桥接8Ω 2400W (.03%THD+N)灵敏度(1w/80hm) 1V信噪比>105dB 频率响应(-3dB) 20Hz-20kHz总谐波失真<0.05%@1kHz 1/10 额定功率转换速率>50V/u阻尼系数>800@8Ω/100Hz输入方式XLR/6.35mm输入阻抗20kΩ(平衡) /10kΩ(非平衡)输出方式NL4 供电规格AC 220V 50Hz-60Hz台 15 返听功放技术规格额定功率(RMS)立体声8Ω 400W*2 (.03%THD+N)立体声4Ω600W (.03%THD+N)立体声2Ω 800W (.03%THD+N)桥接8Ω 1200W (.03%THD+N)灵敏度(1w/80hm) 1V信噪比>105dB频率响应(-3dB) 20Hz-20kHz总谐波失真<0.05%@1kHz 1/10 额定功率转换速率>50V/u阻尼系数>800@8Ω/100Hz输入方式XLR/6.35mm输入阻抗20kΩ(平衡) /10kΩ(非平衡)输出方式NL4 供电规格AC 220V 50Hz-60Hz台 16 超低音专业功放规格&参数:额定功率1KHz立体声8Ω 1200W8Ω 1200W (.03%THD+N)4Ω 1800W (.03%THD+N)2Ω 2400W (.03%THD+N)桥接8Ω 3600W (.03%THD+N)总谐波失真<0.05%(10%额定功率)互调失真<0.1%(60Hz/7kHz,10%额定功率)频率响应20Hz~20kHz(+0/-0.25dB) 相移特性<±15°阻尼系数>800(8Ω/100Hz)分离度>115dB信噪比>108dB(A计权) 整机增益39±0.5dB通道增益差<0.25dB 输入灵敏度1V 转换速率>100V/μs输入阻抗非平衡输入10kΩ,平衡输入20kΩ电源要求~,220V/230V,50Hz/60Hz,1800V A环境温度工作温度-10℃~40℃储运温度-25℃~80℃环境湿度≤90%台 17 电源时序器一路主电源输入,10路受控电源输出。
DISCO设备说明书

划片机作业手册-----DiscoAutoma tic Dicing Saw 9890501 发表于: 2005-11-26 22:17 来源: 半导体技术天地(disco)1.0 TitleDiscoAutoma tic Dicing Saw2.0 Purpos eThe DiscoAutoma tic Dicing Saw is a precis ion machin e used to cut semico nduct or wafers into indivi dualchipsor dice. Wafers are held to the chucktableby meansof vacuum and t he chuckcan accomm odate wafers with diamet ers from 2" to 6 ". The maximu m tablestroke (left-rightmoveme nt of the chu cktable) is 160 mm (6 5/16"). The cuttin g rangeis 20.4 mm to 153 mm in 1 mm increm ents(0.8" to 6" in 0.025" increm e nts). The cuttin g feed speedis variab le from 0.3 to 10 mm/ sec. (0.012" to 12"/sec).The dicing wheelis mounte d on a high freque ncy air-bearin gspindl e with an averag e rotati on speedof 30,000 rpm. The rangeof depthleft uncutis variab le, and ranges from 0.00 5 mm to 19.995 mm (0.0002" to 0.7872") in stepsof 0.005 mm (0.0002") increm ents. (Do not use a Z-indexof less than 0.07 mm withou t consul tinga superu ser.)Follow ing each cut, the Discouses stored parame tersto aut oma tical ly indexthe waferalongthe Y-axis. The maximu m sp indl e stroke (forwar d-backwa rd moveme nt of spindl e) is 160 mm (6 5/16"), and the variab le spindl e indexranges from 0. 002 mm to 99.998 mm (0.0001" to 4") in indexi ng stepsof 0. 002 mm (0.0001") increm ents.3.0 ScopeThereare four fixedsawing modesavaila ble:MODE AThe cut is made only in one direct ion as the chuckmovesfr om rightto left (down cut).MODE BThe cut is made in both direct ionsalongthe X-axis (down c ut/up cut).MODE CThis mode also cuts in both direct ionsalongthe X-axis, bu t the bladedescen ds within the rangeof 0.005-19.995 mm al ongthe Z-axis when the chucktablemovesfrom left to righ t. Use this mode for cuts deeper than 650 micron s.MODE DThis mode is constr ucted with a DRESS, whichuses a dressb oard, and a PRE-CUT, whichuses a dummywafer.Dicing tape and hoopsare availa ble in the Microl ab. Tape c an be foundon a dispen ser in 432b, and hoopsare stored be neat h the discosaw. Dicing tape is recomm ended for all dic ing operat ionsand is requir ed for throug h wafercuts.4.0 Applic ableDocume nts5.0 Defini tions and Proces s Termin ology6.0 Safety7.0 Statis tical/Proces s Data8.0 Availa ble Proces s, Gases, Proces s Notes8.1 Cuttin g Blades In UseSilico n BladeSemite c Corp. PN S2525kerf (widthof cut) = .64 micron s or .0025”Maximu m depthof cut = 640 micron s or .025”Cerami cs, saphir e, crysta l substr ateDicing Techno logy, PN CX-004-270-040-Hkerf .004”, 50-70 micron abrasi ve, 1 mm or .040” exposu reRecomm ended cuttin g speed, best cut: ..25 mm/sec, Z-index: . 7, .04Maximu m cuttin g speed: .5 mm/sec (more chippi ng)GlassDicing Techno logy, PN CX-010-600-060 Jkerf .010”, 22-36 micron abrasi ve, 1.5 mm or .060” exposu reRecomm ended cuttin g speed, best cut: .5 mm/sec, Z-index: .7, .04Maximu m cuttin g speed: 1 mm/sec9.0 Equipm ent Operat ion9.1 Operat ing Precau tionsSilico n partic les (shippe d pieces) produc ed by dicing operation will coat your sample s, if you do not use a protec tive layer. Theseare sharpedgedpartic les, whichcan easily p enetr ate the underl yingstruct ure, and are very diffic ult o r imposs ibleto remove. It is highly recomm ended that you c oat your wafers with 1-2 microm eters of photor esist as a sa crif icial layerthat can trap and laterremove partic les (p ost dicing operat ion). You can use the manual spinne r (head wa y) or the automa ted tracksystem s (SVG) to perfor m this c oatin g.Chapte r 1.3 of the manual, module 6 (MOD6) provid es and ove rvi ew of the resist coatin g proced ure, if you are not familiar with this proces s. Please note that thereis no need fo r HMDS treatm ent of wafers surfac e (skip Sectio n A). Once w aferis dicedyou can easily remove your resist layeralong with the partic les in a aceton e bath follow ed by isopro pan ol and a DI rinse/dry steps(soak sample s for 2 minute s in aceton e, DI rinse, then 2 minute s in isopro panol follow ed by DI rinse).Before operat ing the saw, be sure to verify the follow ing:9.1.1 The bladeis intact. If you attemp t to cut a w aferwith a damage d blade, it may causesevere damage to th e spindl e. You may change the bladeby follow ing the proced ure posted on the wall. Be carefu l not to applyexcess ive f orceto the spindl e. Use the torque driver that is kept by the saw.9.1.2 The AUTOBR EAKER CONTRO L switch (locate d on the rightside of the main body) is turned on (in the UP position).9.1.3 The air is on and is beingsuppli ed at 80 psi (or more).9.1.4 The wateris on.9.1.5 The STANDB Y lightis on.During operat ion, make sure:9.1.6 Your waferis no more than 550 um thick. If yo u are cuttin g thickwafers, waferstacks, etc., you must us e MODE C. Otherw ise, the saw bladewill scrape alongyour w aferon the return stroke, damagi ng your wafer, the blade, and possib ly the spindl e. Simila rly, neverattemp t to make a cut that is deeper than the expose d amount of saw blade, sincethis will placea high load on the spindl e and possib ly damage it.Dicing blades are made of thin materi al and cannot be used for side grindi ng. If you are dicing a sample (a half wafe r, etc), whichhas a pre-existi ng flat edge parall el to the cuttin g direct ion, be very carefu l not to let the bladein dexover and try to cut rightalongthe edge of the sample. The latera l forces that are induce d in the bladewill easi ly peel it off the bladeholder.9.1.7 Coolin g wateris beingsuppli ed to the cuttin g area, at a flow rate of at least0.3 lpm.9.1.8 Always perfor m a Setupafterchangi ng the blad e. Otherw ise, if the new bladeis at all larger than the ol d blade, it may cut into the chuck.Note: Spindl e Shutdo wnThereare two ways to stop the spindl e from rotati ng. Pressing the button SPINDL E will turn off the spindl e and preser ve the height settin g. Pressi ng the EM STOP will stop the s pindl e, raiseit, return it to the home positi on and erasethe height inform ation.If a bladeis to be change d, it is impera tiveto use EM STO P rather than spindl e to stop rotati on so new height inform ation is progra mmedfollow ing the bladechange.NEVERTURN OFF THE DISCOWHILETHE SPINDL E IS TURNIN G.FIRSTSTOP THE SPINDL E ROTATI ON WITH ONE OF THE ABOVEMETHODS.9.2 Initia l Set-UpBefore beginn ing the actual operat ion, the saw must be "set -up". This allows the machin e to verify the zero refere nce pointalongthe Z-axis (i.e. verifi es the chuckheight). Th is proced ure is done withou t a waferon the chucktableas the presen ce of a wafermay causedamage to either the blad eor the wafer. Be sure that thereis no waterpresen t on t he surfac e of the chucktable. The proced ure is as follow s:9.2.1 Checkthat the spindl e coveris on tightl y. Pr essthe SPINDL E button (the LED should now be lit). Verify that the spindl e is rotati ng.9.2.2 Pressthe ILLUMI NATIO N button to turn on the l ights to the micros cope.9.2.3 Pressthe VACUUM button (the LED should now be lit).9.2.4 Pressthe SET UP button. This will causethe b ladeto rise alongthe Z-axis and stop at the limitof trav el alongthe Z-axis. The chucktablewill now move to and stop at approx imate ly the center of the Y-axis. The chuckta blewill then move alongthe X-axis from the left to the SE T UP positi on and stop. The bladewill descen d alongthe Z-axis and touchthe surfac e of the chucktable, then immedi a tely risesto form a gap equalto the amount entere d into t he Z INDEX. The chucktablewill now move alongthe X-axis to the positi on of the micros copeand stop. The SET UP lamp will now come on to indica te the comple tionof the SET UP operat ion.9.3 Progra mmingThereis spaceavaila ble for storin g 10 differ ent progra ms (Prog.#0-#9). Progra mmabl e parame tersinclud e:► MODE of cuttin g► CUT STRK: length of the cuttin g stroke► CUT SPD: speedof cut (see TableI for settin gs)► Y-IND: steppi ng indexin Y► Z-IND: distan ce to be left uncutas measur ed up from the chuckzero refere nce point► Theta-IND: anglethat the waferis rotate d betwee n c uts done for block1 and for block2The follow ing is a detail ed exampl e of the proced ure for en teri ng data:9.3.1 Pressthe INCH/MM button to select units. The INCH will lightto indica te all parame terswill be set in i nches, whilethe MM will lightto indica te the select ion of mm (for this exerci se choose mm).9.3.2 PressFIX, and the curren t cuttin g MODE will be displa yed.9.3.3 Pressthe MODE button untilthe desire d MODE i s displa yed (for this exerci se select A).9.3.4 Pressthe PROG# key and use the numeri c keypads to enterthe desire d progra m number (for this exampl e ent er1).9.3.5 Pressthe C (clear) key. This will eraseall c urren t parame tersentere d for the select ed progra m.9.3.6 The CUT STRK LED should now be blinki ng to ind ica te that this is the curren t parame ter for progra mming. T he firstdata that you enterwill be the valuefor the desi re d cuttin g patter n, whichis square. The cut stroke remain s the same length and is equalto the diamet er of the wafe r. Enteri ng a 0 will give the square patter n. This data is shownin the BLOCKdispla y.9.3.7 The CUT-STRK LED should stillbe blinki ng to i ndica te that it is the curren t parame ter for progra mming. T he CUT-STRK is usuall y equiva lentto the waferdiamet er, an d is the length of the desire d cut (the center of the chuck is used to determ ine wherethe cut begins; e.g. for a 100m mstroke the cut will begin50mm to one side of the center and contin ue 50mm beyond the center). Use the keypad to ent erthe desire d value(for this exampl e enter100 for 100 mm).9.3.8 Pressthe W key to write(enter) the data.9.3.9 The CUT-SPD LED should now be blinki ng to indi ca te that it is the curren t parame ter for progra mming. Chec kTableI for the valueto enterto get the desire d X-axis speed. Use the numeri c keypad s to enterthe desire d value. For this exerci se enter15. Note: Be carefu l when select ing a valueto enteras too greata speedwill breakthe blade!9.3.10 Pressthe W key to write(enter) the data.9.3.11 The Y-IND LED should now be blinki ng to indica te that it is the curren t parame ter to progra m. Use the numeric keypad s to enterthe desire d cuttin g index(in mm) for b lock1. Be sure to use the decima l pointif necess ary. For t his exampl e, enter10.880 (if you are unsure of the correc t valuefor the Y-INDEX, you can measur e this distan ce using the DATA SEL button as detail ed in Sectio n 9.6).9.3.12 Pressthe W key to write(enter) the data.9.3.13 Y-IND LED is stillblinki ng to indica te that it is waitin g to be progra mmed. Use the numeri c keypad s to ent erthe desire d cuttin g index(in mm) for block2. For this e xampl e, enter10.880. Note: block2 cuts will be the firsto nes made when usingthe FULL AUTO mode.9.3.14 Pressthe W key.9.3.15 The Z-IND LED should now be blinki ng to indica te that it is the curren t parame ter for progra mming. Use the numeri c keypad to enterthe desire d value. The valueentere d (in mm) is the depthleft UNCUTas measur ed up from the c huck. Dicing tape thickn ess of 125 micron s should be takeninto consid erati on. When usingdicing tape, throug h waterc uts can be achiev ed with a Z-indexno less than the minimu m recomm ended 0.07 mm. For this exerci se, enter0.15.9.3.16 Pressthe W key.9.3.17 The Theta-IND LED should now be blinki ng. Use the numeri c key to enterin the desire d valuefor the angle,whichthe chuckwill rotate, betwee n cuts made for block2 a nd block1. This valuewill almost always be 90, so enterth is value.9.3.18 Pressthe W key. Progra mming is comple ted.To view your progra m, pressthe SHIFTkey succes sivel y to d ispla y each parame ter. If a parame ter must be change d, firs tpressthe C/E key and then re-enterthe data. Be sure to pressthe W key to enterthe new data.9.4 Operat ing ModesThereare two differ ent modesof operat ion: (1) fullyautomatic (FULL AUTO), and (2) semi automa tic (SEMI AUTO). Both modesuse the curren tly select ed progra m for determ ining cu ttin g parame ters.9.4.1 FULL AUTOThe fullyautoma tic mode will cut both channe ls (afterwafe ralignm ent) as indica ted in the follow ing cuttin g sequen ce: Channe l 1 manual alignm ent -> Manual rotati on to Channe l 2 -> Channe l 2 manual alignm ent -> Channe l 2 automa tic cut tin g -> Automa tic rotati on to Channe l 1 -> Channe l 1 automa tic cuttin g. The FULL AUTO button must be on (LED will be l it) whilealigni ng, and cuttin g is initia ted with the START/STOP button. The bladecoolin g waterturns'on' at this po int. Adjust waterflow with the contro l knob on the rotame t er. You can tempor arily halt the cuttin g operat ion to inspect the cut by depres singthe START/STOP button. This turnscoolin g wateroff. Once the START/STOP button has been depr es sed, cuttin g will contin ue untilthe curren t cut is made all the way across the wafer, then the chuckwill move unde rthe micros copefor viewin g. Pressi ng the START/STOP button againwill reinit iatecuttin g and the chuckwill automa ti cal ly indexto the positi on for the next cut. Leavin g it st oppe d too long may causeit to halt comple telyand revert t o manual mode, so be carefu l to quickl y do any requir ed ins pec tions.9.4.2 SEMI AUTOSEMI AUTO mode allows you to aligneach cut before it is made, or you can use it to automa tical ly indexand cut the wa ferafteronly a single alignm ent is made. Note: SEMI AUTO will not automa tical ly rotate the wafer. In SEMI AUTO mode you beginby manual ly aligni ng the wafer, then you depres s the SEMI AUTO button (waterto the bladewill beginto spra yat this point). To initia te cuttin g, pressone of the Y m oveme nt arrows. Adjust waterflow with rotame ter contro l kn ob. Cuttin g will beginalongthe same path by whichyou ali gne d the wafer, and will then automa tical ly indexin the sa me direct ion as the Y moveme nt arrowyou used to initia te c uttin g. If you wish to halt the cuttin g proces s, depres s ei ther of the follow ing button s: SEMI AUTO, REPEAT, INDEX, or JOG/SCAN (for the Y axis). The bladewill contin ue the cut across the waferthen the chuckwill move underthe scopefor viewin g. The coolin g waterwill stop. You can then use the INDEXand Y arrowbutton s (whichwill move the chuckin the select ed Y direct ion the amount whichis stored for th e Y-IND in the curren t progra m) or JOG/SCAN to move the waf erto the next desire d positi on, alignthe waferand make a nothe r cut. This proces s can be repeat ed as many timesas d esire d.9.4.3 Alignthe micros copecrosshair to the blade.Note: The two knobsnear the micros copeon the discoare (1) focusand (2) front-back kerf widthadjust ment(if the cut is not beingmade wherethe micros copesays it should be). Lab techssugges t usersnevertouchthe kerf adjust men t. It's almost nevernecess ary to use the focuseither.9.5 WaferAlignm entAfterenteri ng your progra m and decidi ng on the type of ope rat ing mode to use, the next step is to prepar e your waferfor dicing.Dicing tape can be used with hoops(snap ring set) to better contro l the dicing proces s. A set of dicing hoops(an inn erhoop and an outerhoop) will hold the dicing tape tightl y over the hoops. First, placea square of dicing tape, adh esi ve side up on the innerloop. Second, forcethe outerho op over the innerhoop from the adhesi ve side of the dicing tape. The result should be a tightsurfac e of dicing tape readyto accept a wafer. Please do not take the dicing rings(hoops) away from the discostatio n. Snap ringsand dicing tape should be kept in 432C, the room adjace nt to the Dis costatio n.Now placeyour waferon the chuckand alignit precis ely:9.5.1 For FULL AUTO mode, depres s the FULL AUTO button (LED will light).9.5.2 With the VACUUM off, center your waferon the chuck.9.5.3 Depres s the VACUUM button to turn on vacuum (L ED will light) to the waferand checkthe vacuum gauge--it should be in the greenrangewith a waferon the chuck.9.5.4 Maneuv er the micros copeover the wafer(the sc opewill be positi onedover the center of the chuckautoma t ical ly if FULL AUTO is enable d when you turn on the VACUUM).9.5.5 Use the ThetaJOG/SCAN and arrowbutton s to al ignyour waferin theta. Be sure to pressthe arrowbutton,whichis outlin ed in greenlast, as this enters the positi on into the Disco's memory.9.5.6 Use the Y-Axis JOG/SCAN and arrowbutton s to p recis ely alignyour waferin Y. Be sure to pressthe arrowbutton, whichis outlin ed in greenlast, as this will enter the positi on into the Disco's memory. For SEMI AUTO, you a re now readyto begincuttin g by pressi ng the SEMI AUTO but ton (waterto the bladewill beginto spray), and the desired Y arrowbutton.9.5.7 For FULL AUTO mode, depres s ROTATI ON and one of the thetadirect ion arrows to rotate the waferin prepar a tion for block2 alignm ent. Repeat steps9.5.5 and 9.5.6 for precis e alignm ent. (Rememb er to pressthe arrowbutton, wh ichis outlin ed, in greenlast!) Pressthe START/STOP button to initia te automa tic cuttin g.9.6 Measur ing Distan ce Alongthe Y-AxisIf you are unsure of the precis e valueto enterfor the Y-I ND, the Discohas a featur e, whichallows you to measur e distan ces alongthe Y-Axis as detail ed in the follow ing:9.6.1 Usingthe Y and ThetaJOG/SCAN arrows, positi o n your waferat the desire d starti ng pointfor beginn ing me asur ement s.9.6.2 Pressthe DATA SEL button.9.6.3 Pressthe 1 button on the numeri c keyboa rd. The data panelwill now displa y zerosto indica te that this i s the zero starti ng point.9.6.4 Make sure that the Y JOG/SCAN is enable d (LED will be lit), and use the arrowbutton s to move the wafert o the desire d measur ement locati on.9.6.5 Data displa yed on the panelis the measur ed Y-Axis moveme nt in mm (or inches if this is the select ed unit option). A negati ve valueindica tes that moveme nt is toward the frontof the machin e, whilepositi ve indica tes moveme nt to the rear.9.6.6 Record this value(it will disapp ear when you disabl e this featur e) for use when progra mming Y-IND.9.6.7 Pressthe SHIFTbutton to disabl e the Y-Axis d istan ce measur ement featur e.9.7 Action s Danger ous to DiscoBe sure that you unders tandthe follow ing ways that the mac hin e can be damage d, and be carefu l not to make thesemistakes:9.7.1 The air-bearin g spindl e can be galled and ruin ed if it is rotate d by hand when the 80 psi air is not on. For exampl e, if you change the bladewithou t firstturnin g on the powerto the machin e (so air flowsto the spindl e), the bearin g surfac es will rub agains t each otherand be dam age d. So the firstthingyou must always do before touchi ng the spindl e is to turn on the power, and wait a few second s for the air pressu re to come up.r than t 9.7.2 If you try to make a cut that is deepehe length of the blade, then the flange will ride up on the substr ate beingcut, and the spindl e may spin inside the h ub and become galled. Blades become shorte r with use, so inr t spec t the bladebefore use to make sure that it is longe han the cut depthyou need.9.7.3 If you change the bladeand then startto cut withou t redoin g the set-up, you may cut into the table(if the new bladeis longer than the old one), or the flange ma y hit the waferif the new bladeis shorte r than the old on e.9.7.4 The needle on the chuckvacuum gaugeshould be in the blue area. If it is in the red, the wafermay not b e held adequa telyand can be movedby the forceof cuttin g. This will breakthe blade.9.8 Shut-Down Proced uresWhen finish ed with the saw, please shut it down as follow s:9.8.1 Pressthe SPINDL E button to bringthe spindl eto a contro lledstop (LED will go out).9.8.2 Pressthe ILLUMI NATIO N button to disabl e the l ights to the micros cope(LED will go out).9.8.3 Afterthe spindl e has stoppe d, pressEM STOP. This will raisethe bladeup out of the way.9.8.4 Cleanand dry the chuckand surrou nding area w ith cleanwipes. Be carefu l not to hit and damage the blade!9.8.5 Turn off the AUTOBR EAKER CONTRO L switch es (DOW N positi on).9.8.6 Disabl e discoon the wand.9.9 FinalBladeInspec tionBefore Leavin g the DiscoThe bladewill wear whileyou are usingit. It will be shor te r, and may be partia lly broken, so you must give it the s ame closeinspec tionwhen leavin g the saw that you did when arrivi ng and making sure that the bladeis ok to use. If the bladeis bad (as explai ned below) it is your respon sibil ity to change it before you leavethe saw.9.9.1 BladeLengthIf the bladelength is less than 0.5 mm it should be thrown away sincethe next user may try to cut throug h a waferth at is thicke r than this. Then the hub wouldhit the wafer, and breakit, and gall the shaft. The rate at whichbladel ength wearsaway increa ses with feed rate, so if you want t o maximi ze bladelife, select a slower traver se speed.9.9.2 Broken BladesReport broken blades usingFAULTS when spares are not available to the next user.Someti mes sectio ns of the bladeget knocke d out, but the re st of the bladeis stillintact. If a replac ement bladeis availa ble, the broken bladeshould be replac ed. If no replacement is availa ble (as when the office is locked on weeken ds), a broken bladecan stillbe used. It is weaker, so a slower traver se speedshould be used to keep it from breaki n g comple tely.When handli ng the blades, rememb er to only touchthe hub. I f you touchthe cuttin g edge, or hit it agains t someth ing, you can bend it or knockpieces of it out.10.0 Troubl eshoo tingGuidel ines11.0 Figure s and Schema tics12.0 Append icesIMPORT ANT NOTEFor the resin-bonded (black) blade, cut speedmust be 2 mm/ sec or less (speedvalueof 7 or lower).For the metal-bonded (shiny) blade, cut speedmust be 10 mm /sec or less (speedvalueof 15 or lower).DISCOStudyGuideBe sure to know...1. Start-up and Pre-Start-up proced ures.2. Settin g up the Z-axis zero positi on.3. Cuttin g in differ ent modes.4. Changi ng the blade.5. Safety for the user.6. Action s "danger ous to disco".7. Choosi ng the correc t blade.8. Blade-relate d proble ms and troubl eshoo ting.9. Cuttin g all the way throug h a wafer, cuttin g thickwafers.10. Starti ng and stoppi ng the spindl e.11. When to use Set-up.12. Minimu m Z-index, air pressu re, waterflow.13. Enteri ng the progra m.14. Shutdo wn proced ure.15. Aligni ng the optics.16. Troubl eshoo tingthe displa y.17. Choosi ng a reason ablecut speed划片机作业手册-----迪斯科自动切割锯9890501发表于:2005-11-26 22:17来源:半导体技术天地(迪斯科)1.0标题迪斯科自动切割锯2.0目的迪斯科全自动切割锯用于切割半导体晶圆切割成单个芯片或骰子是一种精密的机器。
欧诺杜亚尚飞电机技术参数

欧诺杜亚尚飞电机技术参数1.功率:欧诺杜亚尚飞电机具有不同功率等级可供选择,一般范围在1KW到1000KW之间。
2.效率:欧诺杜亚尚飞电机是一种高效能电机,其效率可达到国际先进水平。
一般而言,其效率在95%以上,能有效地节约能源并降低能源消耗。
3.转速:欧诺杜亚尚飞电机可以根据用户的需求制造不同转速的电机,常见转速有1500转/分、1000转/分等。
这种灵活性使得该电机适用于不同行业和应用领域。
4.电流:欧诺杜亚尚飞电机的额定电流会根据功率和工作条件的不同而有所变化。
一般而言,欧诺杜亚尚飞电机具有合理的额定电流,使其能够在长时间工作中保持稳定性和耐久性。
5.绝缘等级:欧诺杜亚尚飞电机通常采用F级或H级绝缘材料,以提高电机的绝缘性能和安全性能。
6.过载能力:欧诺杜亚尚飞电机具有较好的过载能力,能够在短时间内承受额外的负载,确保电机在高压力和负荷情况下的稳定工作。
7.噪音:欧诺杜亚尚飞电机采用先进的减噪技术,降低了电机运行时的噪音水平,使其在安静的环境中工作时不会产生过多的噪音。
8.使用寿命:欧诺杜亚尚飞电机采用高质量材料和先进的制造工艺,具有较长的使用寿命。
它能够在恶劣的环境条件下工作,并保持高效和可靠性。
9.外观:欧诺杜亚尚飞电机的外观设计简约,美观大方,易于安装和维护。
10.控制方式:欧诺杜亚尚飞电机可以采用直接启动、星三角启动、变频启动等多种控制方式,满足不同应用场景的需求。
总之,欧诺杜亚尚飞电机具有功率大、效率高、转速、电流稳定等特点,能够适应不同行业和应用领域的需求。
同时,它还具有可靠性高、耐用性强等优点,是一种理想的电机选择。
善佳发泡点胶机参数表
善佳发泡点胶机参数表【最新版】目录1.善佳发泡点胶机简介2.善佳发泡点胶机参数表内容3.参数表的解读和应用正文善佳发泡点胶机是一款高性能的点胶设备,广泛应用于电子、电器、汽车、新能源等领域。
它能够实现高速、精确、稳定的点胶作业,大大提高生产效率和产品质量。
为了帮助用户更好地了解和使用这款设备,厂家提供了一份详细的善佳发泡点胶机参数表。
参数表包含了善佳发泡点胶机的各种技术参数和性能指标,如下:1.型号:XX 型号2.工作电压:XXV3.工作频率:XXHz4.输出功率:XXW5.胶桶容量:XXL6.点胶速度:XXpcs/s7.精度:±XXμm8.气压:XXMPa9.空气流量:XXL/min10.重量:XXkg11.外形尺寸:XXmm×XXmm×XXmm以下是对参数表的解读和应用:1.型号:选择适合自己生产需求的型号。
不同型号的设备在性能、容量、速度等方面有所差异。
2.工作电压和频率:这两项参数决定了设备的电力性能。
请确保使用符合要求的电源,避免设备损坏。
3.输出功率:决定了设备的点胶力度,可根据实际需求进行调节。
4.胶桶容量:选择合适的胶桶容量,以满足生产需求并减少换胶频率。
5.点胶速度:设备能够实现的高速点胶作业,提高生产效率。
6.精度:设备的点胶精度,影响胶水的定位准确性。
高精度设备能够实现更精确的点胶作业。
7.气压和空气流量:这两项参数影响设备的稳定性和点胶效果。
需根据实际需求进行调节。
8.重量和外形尺寸:设备的重量和尺寸,方便用户了解设备的体积和搬运安装。
通过善佳发泡点胶机参数表,用户可以全面了解设备的性能指标,为选购、使用和维护设备提供依据。
欧玛4000SPOT电脑摇头灯用户手册说明书

用户手册广州市欧玛灯光设备有限公司1500W电脑摇头灯SEER4000SPOT广州市欧玛灯光设备有限公司客户服务电话:400-690-2226目录安全信息 (3)灯具简介 (6)运输 (8)电源 (10)灯泡 (12)控制连接 (15)物理安装 (17)控制面板 (19)维护指南 (23)通道表 (25)十分感谢您购买欧玛产品,在您尝试使用我们的产品之前,请您仔细阅读并充分了解本册所录的全部安全指示,以避免可能造成身体伤害、财产损失或产品受损的潜在危险。
欧玛灯光不承担未按该说明书指示操作而先造成的任何损失或关联损失。
本说明书安全信息符号危险!指会导致严重伤害直至死亡的事项危险!指安装及维修前先阅读说明书危险!高压危险,指预防接触致人死命的电击警告!注意防火警告!不要接触热的表面,谨防烫伤警告!谨防辐射伤害眼睛,请戴好护目罩警告!谨防伤手,请戴好防护手套本产品有致严重伤害或致死的电击、燃烧、灯泡爆炸、坠落的危险安装、通电、检修本产品前请阅读本说明书如下的安全措施,并遵循灯体丝印的安全信息如有任何有关安全操作的疑问,请联系欧玛分销商或拨打欧玛全国服务热线安全信息警告:安装、通电及维修本产品前,请先阅读本章节的安全信息部分警告:本产品仅供专业使用,禁止家庭使用400-690-2226或************电击保护◆在打开或更换任何盖子或部件(灯泡和保险),或者灯具不使用时,请断开外部电源◆确保设备可靠接使用带过载及接地保护的与灯具电压频率匹配的AC电源◆使用额定负载20A以上的三芯电源电缆,如ST,STW,SEO,SEOW和STO等厂商生产和缆线◆使用前,确保电缆处于正常状态且适合于所连设备的电流量◆当发现电源线缆或插头损坏,灯具被淋湿或电源部分有明显的过热时,请立即断开电源◆勿暴露本产品于雨中或潮湿空气中灯泡安全◆长时间暴露于未加遮挡的放电泡前会造成眼睛和皮肤的灼伤,请勿直视出光口,请勿直视点着的灯泡◆外壳、挡光板、镜头、保护屏或隔热片损坏的灯具,请勿使用◆灯具应只能与保护屏一起完整使用◆热的放电泡有很强的气压,可能毫无征兆的出现爆炸现象◆因此,维修灯体内部或操作灯泡时,须戴上护目镜和手套并保证灯具充分冷却◆切勿使且残缺、损毁或有任何其它缺陷的灯泡◆监测灯泡的使用时间和光衰情况,在本规格书或灯泡厂商额定的灯泡使用寿命前更换灯泡◆安装的灯泡要符合相关的安规要求◆如果灯泡的石英球体破裂,会释放出少量水银和毒气,如果位于狭小的空间,请尽快撤离并彻底的对此空间通风,收集破裂的灯泡时应戴上防护手套,灯泡报废时勿随意丢弃,应将这些有毒有害的危险品送到专门的处理机构预防烫伤和火灾◆使用过程中灯具的外表温度可能会比较高,避免接触到人体或其它物体,搬运前请让灯具冷却充分◆保证可燃材料(如:织物,木头,纸张等)远离灯具至少0.2米,易燃物品尽量远离本设备,保证进出风口至少有0.1米的空间◆不要直接照射3米范围内的表面◆白天时遮住镜头或转动镜头方向以免太阳光直射到镜头上,因为镜头能聚焦阳光造成潜在的火灾危险◆当环境温度超过40°C(104°F).时请勿开机使用◆无论如何不要改装本灯具,不得安装非欧玛原装的部件,不得在透镜或其它光学配件上粘贴任何滤纸,图片,只能使用欧玛认可的附件以改变光柱效果◆不得试图短路保险丝或温控开关,换用保险丝时请按指定规格和负载更换避免坠落伤害◆不要一个人独自搬动灯具◆在吊架上要使用两个均布的灯钩,不得使用一个单独的灯钩◆当夹装本设备到TRUSS架或其它支架且不是垂直吊挂时,请换用蝴蝶扣灯钩,不得使用G形灯钩和快扣灯钩和其它安装后没有完全环绕灯架的灯钩附件◆确保支架及吊挂系统能支撑10倍以上灯具重量◆提升灯具及吊挂保险绳的着力点不得在灯具手柄上◆须安装保险绳,且保险绳须符合TUV要求,按EN60598-2-17第17.6.6章节要求,保险绳须能承受10倍灯具的重量◆确保外部配件及吊具完全的紧固◆安装,维修及移动灯具时应有稳定的平台,其正下方应设有安全围栏◆本文未描述的相关操作请洽欧玛的授权售后部门广州市欧玛灯光设备有限公司灯具简介灯具简图感谢您选择Omarte SEER4000SPOT,此灯具是一款1500W的电脑摇头图案灯,其具备以下特点:◆电压AC200V-240V(AC100V-120V可选),50HZ/60HZ◆总功率1890W◆标准模式31个控制通道,精简模式25个控制通道◆OSRAM HTI1500W/D7/60或PHILIPS MSR Gold1510SA DE气泡或GE CSR1500S/DE/60◆耐高温玻璃冷光反射杯,光效利用率高◆LCD液晶显示,人机界面友好简洁◆内置可充电池,可在不通电情况下进行DMX地址拔码和其他技术参数的设置◆CMY、CTC无极混色系统。
宁波奥德普限速器说明书

宁波奥德普限速器说明书
宁波奥德普限速器是测量电梯限速器的电气和机械动作速度专业设备。
适用于电梯安装部门等单位对电梯限速器的现场检测,同时适用于电梯及限速器生产厂家的在线检测。
采用的是低压安全电机,可避免工作电源(如AC220V)因意外漏电对测试人员产生的电击风险。
采用7”彩色液晶电容触摸屏,超大的屏幕可以做到测试曲线和数据即时动态显示,测试过程一目了然。
产品用途:
A、检测电梯限速器轮盘线速度。
B、检测电梯限速器动作速度。
参数及性能指标:
A、测量范围:0、25—10m/s。
B、测量精度:﹤±0、5%。
C、测试时加速度≤0、015m/s2。
D、电机zui高转速3000r/min。
E、保存测量条数:4G内存,不限条数。
D、电源:AC220×(1±10%)V,50×(1±2%)Hz。
E、手持电机:29W、DC24V安全电压电机。
F、测量过程一键操作,自动结束试验,简单方便。
G、7吋电容液晶屏、中文仪器界面。
速度曲线和数值动态显示自适应加速曲线,测量速度快。
H、中文输入,可输入产品制造商、型号等产品档案信息。
I、自带4吋热敏打印机,可以现场打印输出测试结果。
J、内存:4G(可升级到64G),海量档案数据存储。
K、驱动,测速,打印一体设计,无需另配组件。
A2O工艺主要参数
A2O工艺主要参数/指标控制:工艺参数/指标控制污水处理的运行需要众多控制参数的合理调控,只有这样,才能保证处理工艺的正常、高效运行。
1 pH值一般污水处理系统可承受的pH值变动范围为6~9,超出范围需进行投加化学调和剂调整;pH值过小会造成混凝絮体小、生物处理中原生动物活动减弱;过大则体现为混凝絮体粗大,出水浑浊,活性污泥解体,原生动物死亡。
对于生活污水,pH值一般符合要求,不需人为调控。
2 B/CB/C即系统进水的可生化性,数值上为同一样品的BOD与COD5的比值。
对于二级污水处理厂,B/C表征污水成分是否满足生物处理的要求。
对于活性污泥系统,一般认为B/C≥0.3,为可生化性良好,生物处理发挥作用。
而可生化性<0.3时,污水中有机物含量不足,无法满足生物处理中微生物生长的需要,生物处理效率低下,此时,调控方法是向污水中投加有机营养源。
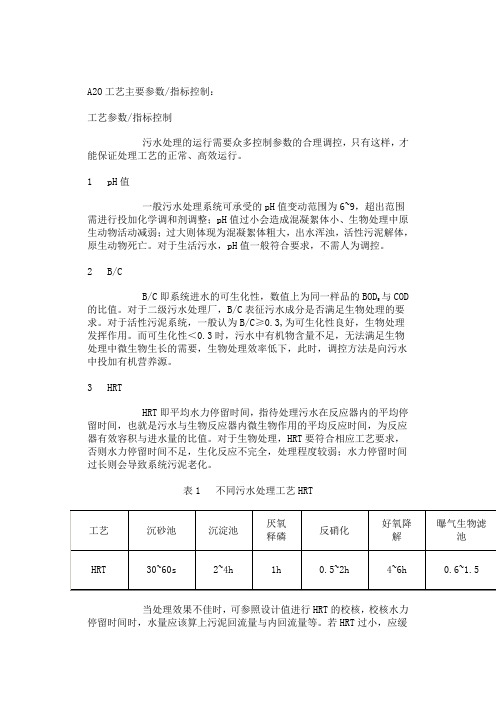
3 HRTHRT即平均水力停留时间,指待处理污水在反应器内的平均停留时间,也就是污水与生物反应器内微生物作用的平均反应时间,为反应器有效容积与进水量的比值。
对于生物处理,HRT要符合相应工艺要求,否则水力停留时间不足,生化反应不完全,处理程度较弱;水力停留时间过长则会导致系统污泥老化。
表1 不同污水处理工艺HRT当处理效果不佳时,可参照设计值进行HRT的校核,校核水力停留时间时,水量应该算上污泥回流量与内回流量等。
若HRT过小,应缓慢减小污水量,过大则缓慢加大污水量。
注意,污水量的增减都应缓慢变动,否则造成系统的冲击负荷;由于污水处理任务艰巨,不要轻易减小进厂污水量,而是在回流量上做出调整。
4 MLSS及MLVSSMLSS为活性污泥浓度,MLVSS为挥发性活性污泥浓度,一般占MLSS的55%~75%,可以概指为污泥中的有机成分。
它们是计量曝气池中活性污泥数量多少的指标。
活性污泥浓度表征生物池中微生物生长平衡情况,活性污泥控制在多少,主要是根据食微比进行核算,一般控制在2000~4000mg/L。
optima8000技术参数
optima8000技术参数Optima8000技术参数Optima8000是一款先进的技术设备,具备多项优异的技术参数。
下面将对Optima8000的技术参数进行详细介绍。
1. 分辨率:Optima8000的分辨率高达1920x1080像素,能够呈现出清晰细腻的图像效果。
用户可以享受到更为逼真的视觉体验,无论是观看电影、玩游戏还是进行工作,都能提供更为精确的图像显示。
2. 亮度:Optima8000具备出色的亮度表现,达到了5000流明。
无论在室内还是室外环境下,都能够保持明亮的画面,不受光线影响。
用户可以享受到更为清晰明亮的投影效果,无需担心画面过暗或模糊。
3. 对比度:Optima8000的对比度为10000:1,能够展现出更为鲜明的画面细节。
无论是黑暗场景还是亮光场景,都能够呈现出更为生动的图像效果。
用户可以看到更多的细节,感受到更为逼真的影像。
4. 投影尺寸:Optima8000支持大尺寸的投影,最大投影尺寸可达300英寸。
用户可以根据实际需求,自由调节投影尺寸,满足不同场景的使用需求。
不论是商务演示还是家庭影院,都能够提供更为震撼的视觉体验。
5. 投影距离:Optima8000的投影距离范围广泛,可以满足不同场合的需求。
最短投影距离为1米,最远投影距离为10米。
用户可以根据实际需求,自由调整投影距离,获得最佳的视觉效果。
6. 噪音:Optima8000采用了先进的散热技术,保持了低噪音的运行状态。
噪音水平仅为32dB,用户可以享受到更为安静的观影环境,不会被噪音干扰。
7. 接口:Optima8000提供了丰富的接口选项,包括HDMI、USB、VGA等。
用户可以方便地连接各种外部设备,如电脑、游戏机、音响等,实现多媒体的无缝连接和播放。
8. 显色性:Optima8000具备出色的显色性能,支持1.07亿种颜色的显示。
能够呈现出更为真实、饱满的色彩效果,使画面更加鲜艳动人。
9. 使用寿命:Optima8000的灯泡寿命长达5000小时,可以满足用户长时间的使用需求。
2018新款不怕撞的无刷且防撞摆闸最新功能参数
多奥“不怕撞的”无刷摆闸一、新品说明多奥新一代无刷防撞摆闸是针对各种人行、车行通道的恶劣环境,精心研制而成的又一款划时代的新型高科技通道产品,该产品采用全新的ARM控制系统和先进的无刷电机工业级控制电路以及独有的DFC技术,加上科学的机械传动设计,使得该产品无论是在性能、寿命、稳定性及性价比等方面都实现了革命性的超越与洗礼!新一代无刷摆闸较市面上摆闸更具有独特优势:1.采用无刷电机,寿命更持;无极防撞(不怕撞),抗破坏性强;2.超强的自我保护能力,非机动车通道的最佳选择,ARM控制技术,功能更强大、扩展性更好;3.模块化设计,结构更简单,更便于维护,运行平稳,速通可调,4.通道宽度可调,防夹性能好,安全性更高!二、功能简述●具有故障自检和报警提示功能,方便用户维护及使用。
●可外接任何控制设备输出的控制信号或按钮或遥控,实现单双向控制通行。
●自动复位功能:每摆动90度,并检测人和物体通过后,即自动复位,或在规定的时间内(延时多档可调)未通行时,系统将自动取消此次通行的权限而回归初始位。
●灯光指示:高亮度通行灯状态指示,指引通行。
●防尾随功能:1、当前面的人和物体通过后,在摆臂复位的过程中,如有人尾随或冲闸,摆臂自动反推力阻挡并报警。
2、(当装有红外探测的情况下)当前面的人和物体没有完全通过时,如有人尾随闯入,则红外启动报警。
3、过人、过车模式可选。
●消防输入:可与消防报警信号连接,实现不断电落杆常开。
●报警提示功能:非法通行或冲闸时,自动发出报警提示。
●速度可调:摆臂打开及关闭的速度多级可调,用户可根据实际需求进行设定。
●新一代工业级ARM控制系统,增设多功能数码设置、加密及复位等功能。
●防反转功能:在摆臂复位的过程中,如发生外力逆转摆臂,摆臂即自动启动反推力且发出报警,待外力消失后则自动回到零位恢复通行。
●自动保护功能:当外力阻止摆臂正常运动时,且外力连续不断,系统将自动检测20秒后自动保护并进入休眠状态。
欧博 参数
欧博参数
欧博是一款智能家居品牌,其产品涵盖了智能家居、智能安防、智能门锁等领域。
欧博的智能家居产品在市场上备受欢迎,其参数也成为了消费者关注的焦点。
首先,欧博智能家居产品的参数非常丰富,包括但不限于以下方面:
1、无线连接:欧博智能家居产品支持多种无线连接方式,包括Wi-Fi、蓝牙、Zigbee等,方便用户连接和控制。
2、设备兼容性:欧博智能家居产品可以与多个品牌的智能设备兼容,如小米、华为、海尔等,方便用户进行智能家居的组合和控制。
3、安全性:欧博智能家居产品在安全性方面非常出色,采用了多重加密技术,确保用户的数据安全。
4、控制方式:欧博智能家居产品支持多种控制方式,包括手机APP、语音控制、定时控制等,方便用户进行操作。
5、扩展性:欧博智能家居产品支持多种扩展设备,如智能音箱、智能灯泡、智能插座等,方便用户进行智能家居的扩展。
其次,欧博智能家居产品的参数非常精准,可以满足不同用户的需求。
例如,欧博的智能门锁可以根据用户的实际需求进行定制,包括密码长度、密码复杂度、指纹识别等参数,确保家庭安全。
最后,欧博智能家居产品的参数非常人性化,方便用户使用。
例如,欧博的智能家居套装可以根据用户的实际需求进行定制,包括设备数量、设备类型、设备摆放位置等参数,确保用户能够享受到最佳的智能家居体验。
总之,欧博智能家居产品的参数非常丰富、精准和人性化,可以满足不同用户的需求,让用户享受到最佳的智能家居体验。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一、DM-180A 带前置合并式功放
功能描述:
✧LED指示,工作状态一目了然;
✧2路LINE输入,3路MIC输入;
✧线路板采用表面封装技术,双面线路设计,大幅提高稳定性;
✧完善的短路/高温/过流保护电路;
✧自动纠正输出信号的失真。
技术参数:
二、DS-512W 壁挂音箱
三、无线会议系统 AD-410A
接收机技术参数:
具有独立的输出和混和输出功能,可接调音台或功率放大器电源供应: AC220V 50Hz
载波频率:VHF 200~270MHz
频率稳定度:±0.005%
信噪比:>100dB
谐波失真:<0.5%
灵敏度:12dB/ uv 60dBs/N
温度范围:-10℃~55℃
外观尺寸:420(L)*250(W)*45(H)mm
发射机技术参数:
耗电量:25mA
电源供应:DC9V
类型:电容式
极性模式:单一指向性
频率响应:40Hz~15000Hz
话筒灵敏度:-47±3dB
温度范围:-10℃~55℃
外形尺寸:140(L)× 110(W)× 55(H)mm 咪管长度:390mm
净重:0.4kg。