S120驱动器配置心得
S120 调试指导
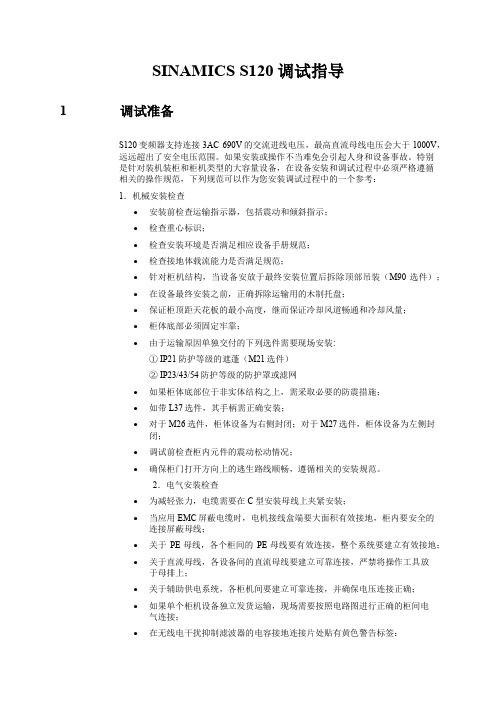
6. 整流装置的相关参数设置,设置完成后点击 Next。
1
1
2
3
3
图 2-7 基本整流装置参数设置(装机装柜型左侧/书本型右侧)
⑴ 设置实际的进线连接电压; ⑵ 选择整流装置是否并联(仅支持装机装柜型模块)及设置并联装置数量; ⑶ 外部制动单元设置,激活后制动单元受整流装置监控。
2
调试流程
S120 的简单调试流程如下图所示:
图 2-1 简单调试流程
说明 S1: 针对共母线结构的多传动设备,整流装置的预充电能力限定了整个共母线 系统的总电容量,在选型样本中可以查到整流装置自身的电容量和允许的最大 电容量以及其它共母线模块的电容量;
S2: 在进行配置之前,我们需要知道驱动器,CU 类型,CF 卡固件版本,电机和 编码器数据。
电缆需按要求的力矩固定在端子上,电机电缆不能超出允许的最大长度, 该长度因电缆类型(是否屏蔽)而异;
制动单元到制动电阻的连接电缆不能超出允许的最大长度,制动电阻的热 触点信号需要连接到 CU 或控制器上;
对于装机装柜设备,当并联应用驱动单绕组电机时,确保电机电缆不小于最 小长度或配备输出电抗器;
S3: S120 支持用基本操作面板 BOP20,高级操作面板 AOP30 及调试软件 STARTER(推荐使用)三种工具进行调试。
面板调试:先进行工厂复位,然后进行快速调试,保存数据;
软件调试:首次在线后先进行工厂复位,可以在线自动配置或离线手 动配置,配置完成后下载并保存数据;
S4: 上电前检查
说明 20kw 和 40kw 的 BLM 内部集成有制动单元。
7. 选择通信报文类型,此处也可以不做设置而之后在“Communication”中进行通信 配置,单击 Next。
SinamicsS120培训教程

SinamicsS120培训教程Sinamics S120是一种高性能的驱动器系列,广泛应用于机械和自动化领域。
为了确保用户正确地使用和操作Sinamics S120驱动器,培训教程提供了详细的指导和说明。
本文将介绍Sinamics S120培训教程的内容,并对其中的一些重要方面进行详细阐述。
Sinamics S120培训教程的内容主要包括以下几个方面:硬件配置、编程和调试、故障排除和维护等。
在硬件配置方面,培训教程会详细介绍如何正确地安装和连接Sinamics S120驱动器以及与其他系统的接口。
此外,教程还会介绍如何正确选择和配置电机参数,并提供一些实用的建议。
在编程和调试方面,培训教程将详细介绍如何使用Sinamics S120的配置软件进行参数设置和调试。
教程会覆盖不同驱动器模块的功能和参数设置,并提供一些实际案例进行演示。
此外,教程还会介绍如何使用在线调试工具进行故障排除和性能优化。
在故障排除方面,培训教程将介绍一些常见故障的原因和解决方法。
教程将详细介绍如何使用Sinamics S120的诊断工具进行故障定位和修复,并提供一些建议和技巧以提高故障排除的效率。
最后,培训教程还将介绍一些维护和保养的注意事项。
教程将解释如何正确地维护和更新Sinamics S120驱动器,并提供一些实用的建议以延长其使用寿命。
此外,教程还将介绍如何备份和恢复驱动器参数,以及如何处理一些常见的维护问题。
通过学习Sinamics S120培训教程,用户将能够充分了解和掌握Sinamics S120驱动器的使用和操作技巧。
此外,用户还可以通过培训教程提供的实用建议和技巧,提高工作效率和效果。
S120驱动

(2)ALM-active line modular(调节型电源模块)或者SLM ?smart line modular (非调节型电源模块),电源模块,在这里把三相交流电转化成直流600V,600V的直流电通过直流母线转移到各个功率模块,为其他伺服模块能源提供。调节型电源模块以及非调节型电源模块的外观上基本一样。
(4)编码器转换器它的作用是把各个编码器信号转换成符合DRIVE-CLIQ通讯协议的信息。例如,SMC20,其中C表示电器柜内安装,而20则表示转换信号为1VPP正弦波。与之相对应的还有SME30,其中E表示柜外安装,而30表示TTL方波。现在几乎所有的信号类型,安装方式都可以找到相应的信号转换器信号。另外还有DMC20或者DME20它的做用是将多个信号,通过它传送到一根电缆上然后继续传输反馈给CU。
X200,X201,以及X202为DRIVE-CLIQ接口用于传输数据。其中X200必须由上一个站传入,而X201传出到下一个站。X202用于扩展,连接到SMC20或者其他部件上。X21-EP端子,端子的1,2脚是温度端子,端子的3,4脚EP使能,驱动器使能。
S120 调试指导
2.电气安装检查 为减轻张力,电缆需要在 C 型安装母线上夹紧安装; 当应用 EMC 屏蔽电缆时,电机接线盒端要大面积有效接地,柜内要安全的
连接屏蔽母线;
关于 PE 母线,各个柜间的 PE 母线要有效连接,整个系统要建立有效接地; 关于直流母线,各设备间的直流母线要建立可靠连接,严禁将操作工具放
检查设备接线是否正确,特别注意装机装柜型整流装置的预充电回路 接线和供电相序,严禁手动合闸旁路接触器或断路器,检查柜机设备 的柜间母线及辅助供电连接;检查各级供电回路是否有短路情况;检 查各级供电电源容量和电压幅值,特别注意 24V 电源容量和电压,在 选型样本中有各个模块对于 24V 电源容量的要求;
图 2-6 选择基本整流装置
6. 整流装置的相关参数设置,设置完成后点击 Next。
1
1
2
3
3
图 2-7 基本整流装置参数设置(装机装柜型左侧/书本型右侧)
⑴ 设置实际的进线连接电压; ⑵ 选择整流装置是否并联(仅支持装机装柜型模块)及设置并联装置数量; ⑶ 外部制动单元设置,激活后制动单元受整流装置监控。
(1) 上电前一定要核查母线上所有模块的电容值之和,确保其不超过该整流模 块所允许的最大电容值。否则可能导致预充电无法完成甚至损坏预充电回 路。
(2) 上电前一定要仔细检查设备接线是否正确,各电压等级供电回路是否存在 短路,电压幅值是否正常;EP 端子需要进行有效连接;针对柜机还要检查 柜间连接是否正常。
3.1.1
基本整流装置的离线配置 1. 插入驱动对象 Drive Unit
图 2-2 插入驱动对象 Drive Unit
S120_配置说明1

1、联机在线后先进行自动配置:
自动配置后离线,完成后面的操作。
2、自动配置好后离线,添加脚本文件如下:
先添加脚本文件夹
再导入文件
选择脚本文件保存的位置:
示例为400W电机1FL6042,打开脚本文件,会自动出现图标
如下图导入数据如下:
导入成功显示如下:
3、再配置驱动如下:
6、电机速度环优化调整:
C:\Users\Administrator\Desktop\使用Trace电机优化步骤.xps
再修改如下参数:
P600 =0;
P1981=180;
P1460=P1460*0.8;
5、电机数据静态辨识:
1)设定参数P1910=1如下图:
2)使用Control Panel测试如下图:
选择要测试的驱动,在上使能电机,如果出现上图确认电机已上使能表示电机识别成功。
P1715=15
3)使用Control Panel手动运转电机如下图:
只要修改两个地方,其他都默认即可:
和
配置报文
注意:当带蜗轮蜗杆减速器或负载大或带刹车时,以下两参数要调整(P1980尽量用10):
改为
改为
改好后在离线状态导入数据,联机后再下载;
注意:
如果使用脚本配置就能正常工作就不用后面的操作,如果电机不能正常工作需后面的操作。
4、计算电机参数:
设定参数P340=1如下图:计算结束会自动变为0;
注意:
1.要正反转多次测试;
2.要转速从慢到额定转速都测以下;
3.观察电机当前转矩是否在电机额定扭矩以下,如果超出额定扭矩则电机要换更高功率的电机;
4.如果测试过程出现7900故障往往是电机输入的参数不对或者驱动/电机不配或者电机/编码器电缆有问题或者拆下电机空载来测试;
S120调试说明
1 配置 (2)1.1 自动配置过程 (2)1.2 手动配置过程 (5)2.调试 (17)2.1获取控制权 (18)2.2 原点设定 (20)3 限位 (23)3.1 软极限设计 (23)3.2硬极限设定 (24)1 配置1.1 自动配置过程1.上载完成后点击自动配置进入自动配置过程,如图自动配置2.进入自动配置过程后会弹出一系列对话框,按照如下过程选择1)点击Configure开始配置点击Configure2)选中保存到ROM,点击OK选中点击OK点击OFFLINE3)下拉菜单选择Servo 点击Create开始下拉选择Servo点击开始配1.2 手动配置过程自动配置执行完成后需要手动配置一些参数,配置过程如下1)双击SERVO_02进入手动配置画面双击SERVO_022)点击Configure DDS 开始配置点击Configure DDS 3)激活基本定位后,点击下一步激活基本定位点击Next 4)选择电源模块选择电源模点击Next5)选择控制器选择控制器点击Next6)选择电机点击Next 7)选择抱闸选择使用抱闸点击Next 8)选择编码器点击Next 9)选择检测系统点击Next 10)选择机械比选择机械比点击Next11)选择报文下拉选择报文点击Next 12)配置结果预览确认无误后点击完成点击Finish* 完成手动配置后,需要保存编译并将程序下载到控制器中,下载完成后需要重启控制器* 从第3步开始为手动配置过程,其中除第3步和第11步需要手动选择外,其他过程均已在自动配置过程中完成,直接点击Next就可以2.调试点击控制面板进入手动调试界2.1获取控制权1)点击1会弹出对话框,输入时间后点击2,即可获取控制权1输入时间22)选择控制方式为基本定位控制3) 手动控制使能,打开抱闸4) 输入点动速度,启动电机* 输入速度需要带有方向,如600或者-6005) 点动控制,电机停止伺服使能打开抱闸启动电机输入速度点动控制电机停止2.2 原点设定1)点击Homing进入原点设定界面进入原点设定界面2)点击画面中的方框设计参考点3)输入参考点位置值,点击接收后关闭画面4)保存数据输入参考值一般输入0 接收参考值4.1)进入Expert List画面4.2)将P971置1,待其重新显示0时表示数据已存储完毕3限位3.1 软极限设计设定软极限时需要将P2582置1,激活软限位功能。
S120的配置与优化

差异总是有,太大就不对了。好好查查是哪里的问题? 接线?端子?省得以后又问三相怎么不平衡?
yming 说的温度设定很有意思,以前没注意,这回也想说说。我们手动输入电机参数时,电机定子电阻要折合75度时的等效阻抗标么值,推想可能西门子也把辨识测量的阻抗折合到了一个标准温度(75度),这两个值可能会差10%。不过温度在电机控制是有意义吗,实际运行时并没有将电机温度运用到计算中吧?我想真正有意义的是缺省了一个电机热态温度,我在冷态优化设定了一个温度,但得出的参数是热态参数,热态时候电机参数才是最准确的。当然电机参数不仅仅是阻抗,还有感抗这个不受温度影响,且一个参数不准确一般状态不影响运行,只有在一些特殊区域,比如低转速大转矩才产生作用。
总之,静态的也是一样,都做记录(实际上并不是用纸笔!不就是改名存盘么)。
静态测试时,重点是输入温度P0625。所以首次调试都是做好工作,开机就去看r0037,就把它作为电机温度啦。(这点要说明,我不喜欢把变频器集中放置,总是把它放在电机附近。)
温度不同,测试结果的参数也不同,但转换后的集总参数应该是一样的。记下来,一样用。
有时候碰到一些性能要求比较高的场合,而自动优化参数又不能满足使用要求的话,你也是应该以自动优化后的那些PI参数为基础,然后根据实际运行情况对这些参数进行微动。可以遵循这几条原则——
曲线振荡很频繁,比例参数P要放大;
曲线漂浮绕大湾,比例参数P往小扳;
曲线偏离给定值并且回复慢,积分时间参数I往下降;
因为你的最终目的是为了使用s120,所以就关于s120我们聊几句:
在你使用变频器带动电机工作时,有几个优化步骤是必须要经历的(具体如何进行优化在手册上有详细步骤)。这些优化过程既包括了对电机本身模型参数的识别,又包括了对变频器装置内部的那些PI调节器的参数自优化。而且,就一般情况而言,当装置完成了优化过程以后,就能带动负载正常工作了,几乎不用你再去修改那些调节器的PI参数。
SINAMICSS120基本参数非常有用

SINAMICSS120基本参数非常有用1.电压和功率范围:SINAMICSS120具有宽广的电压和功率范围,在380V至690V范围内,可提供从0.12kW至5400kW的输出功率。
这使得它适用于各种应用场景,包括工业自动化、物流和制造等各个领域。
2.控制方式:SINAMICSS120支持多种控制方式,包括速度控制、转矩控制和位置控制等。
这使得用户可以根据具体需求选择最合适的控制方式,实现更精准和高效的运动控制。
3. 通信接口:SINAMICS S120具备多种通信接口,包括PROFINET、EtherNet/IP、PROFIBUS DP和CANopen等。
这些接口可以使驱动系统与其他设备和系统实现高效的数据传输和通信,从而提高整个控制系统的整体性能。
4.动态性能:SINAMICSS120具有卓越的动态性能,它可以实现非常快速的启动、停止和加速/减速过程。
这使得它在需要频繁改变运动状态的应用中表现出色,例如在输送线上的物料分拣和装卸过程中。
5.软件功能:SINAMICSS120配备了丰富的软件功能,包括自诊断、参数化、故障检测和保护等。
通过这些功能,用户可以轻松设置和监控驱动系统的运行状态,同时保证驱动系统的稳定和安全运行。
6.智能功能:SINAMICSS120还具备智能功能,例如自适应矢量控制、能量回馈和动态电压恢复等。
这些功能可以帮助用户实现更高的能源效率和减少能耗,同时提高系统的可靠性和生命周期。
7.可编程和可扩展性:SINAMICSS120可以进行编程和扩展,用户可以根据具体需求进行自定义设置和功能扩展。
这使得它非常适用于各种复杂的应用场景,并且可以保持与系统的持续适应性。
总而言之,SINAMICSS120是一款功能强大且多功能的驱动系统,它具备广泛的电压和功率范围,支持多种控制方式和通信接口,并具备优秀的动态性能和智能功能。
这使得它成为众多工业自动化和制造领域用户的首选,既满足了高性能的要求,又具备了灵活性和可靠性。
S120调试总结

西门子S120(5#桥)调试总结整理人:韦同旺一..Drive-CLIQ电缆连接方式:如图1中为CU320与主起1#,主起2#,小车的Motor Module的Drive-CLiQ的连接方式如图2 中为CU320与大车变频器的连接方式Drive-CLiQ连接方式有两种:一种是串联方式(站点比较多的时候运用,但一个网口最多能够串联8个部件),一种为并联方式(上图使用的就是并联方式)备注:ALM的Drive-CLiQ以连接完成。
二.编码器的接线1.编码器采用的是HID100H Incremental编码器端接线方式为: Brown----------------Vcc DC24V正极White-----------------0V DC 负极Green-----------------A+ 信号线A+Yellow----------------B+ 信号线B+SMC30端接线方式为: X521端子号1 -----------A+ 信号线A+X521端子号3-----------B+ 信号线B+X531端子号1------------Vcc DC24V正极X531端子号2------------0V DC 负极三.ALM接线1.检查ALM接线若内部没有给预充电K4供电时,需外供AC 220V电源若内部没有风机供电电源时,需外供AC 220V电源若内部没有供DC 24V电源时,需外供DC 24V电源四.通讯及逆变器是否正常1.硬件组态下载到PLC中,打开STARTER软件,新建一个项目,首先使用网线使CU320与电脑进行连接。
在组态中,点击自动搜索后,会自动完成对CU320的搜索,完成后把项目上传到电脑中。
根据硬件组态中的地址进行设置并对CU320上的地址进行设置(STARTER 中会显示设置的方式)。
在硬件组态中查看通讯是否正常,正常时各CU320上DP指示灯常亮。
2.当DC24V送电后,检查各逆变器模块的指示灯,若显示红灯时则模块不正常。
2024西门子S120驱动器入门教程CU320

西门子S120驱动器入门教程CU320•驱动器简介与基本概念•硬件安装与接线指导•软件配置与参数设置详解•运动控制功能实现目•维护与保养建议•总结与展望录01驱动器简介与基本概念它提供了广泛的功率范围和模块化设计,可灵活适应不同的机械和控制需求。
S120驱动器采用了先进的控制算法,确保了精确、快速和稳定的运动控制。
西门子S120是一款高性能的驱动器,专为满足现代工业应用而设计。
西门子S120驱动器概述CU320是S120驱动器的控制单元,负责驱动器的控制和通信任务。
它具有强大的处理能力和丰富的接口,可连接多种编码器和传感器。
CU320还支持多种控制模式,包括速度控制、位置控制和力矩控制等。
CU320控制单元特点西门子S120驱动器广泛应用于机械制造、印刷、包装、纺织等领域。
其主要优势在于高精度控制、快速响应、高可靠性和易于维护等方面。
此外,S120驱动器还支持多种现场总线协议,方便与上位机或PLC进行通信。
应用领域及优势分析驱动器控制单元编码器传感器相关术语解释一种电力电子设备,用于控制电机的速度、位置和力矩等参数。
一种测量装置,用于检测电机的位置和速度等参数。
驱动器的核心部件,负责处理控制信号和通信任务。
一种检测装置,用于检测电机的电流、电压、温度等状态参数。
02硬件安装与接线指导西门子S120驱动器CU320外观紧凑,结构坚固,适应各种工业环境。
接口丰富,包括电源接口、编码器接口、通讯接口等,满足各种连接需求。
驱动器面板上配有LED显示屏和按键,方便用户进行参数设置和故障诊断。
驱动器外观及接口介绍电源连接注意事项确保电源电压与驱动器额定电压相匹配,避免过压或欠压对驱动器造成损坏。
电源线应使用符合规格的电缆,并确保接线牢固、可靠。
对于大功率驱动器,应考虑电源线的线径和长度,以减小压降和温升。
编码器电缆连接方法01编码器电缆应使用屏蔽电缆,以减小电磁干扰对编码器信号的影响。
02电缆长度不宜过长,一般不超过50米,以减小信号衰减和干扰。
S120 驱动第三方同步伺服电机 创建项目,在线自动配置之后 ...
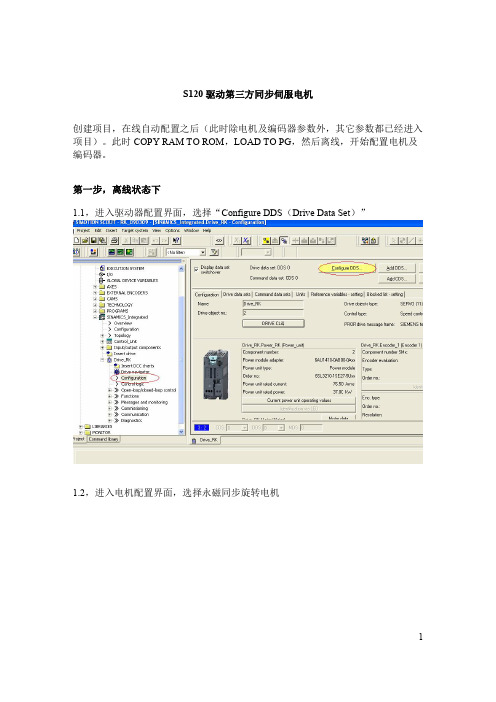
S120驱动第三方同步伺服电机创建项目,在线自动配置之后(此时除电机及编码器参数外,其它参数都已经进入项目)。
此时COPY RAM TO ROM,LOAD TO PG,然后离线,开始配置电机及编码器。
第一步,离线状态下1.1,进入驱动器配置界面,选择“Configure DDS(Drive Data Set)”1.2,进入电机配置界面,选择永磁同步旋转电机1.3,根据电机铭牌输入电机参数对于电机转子转动惯量,如果找不到相应参数,可以输入一个较小的数值,在线后通过电机参数静态识别进行计算。
可选参数可以不输入,即不勾选该项。
1.4,输入电机定子电阻和定子漏抗同样,如果找不到定子电阻和定子漏抗参数,也可以输入一个较小的数,然后通过设置P340=1来完成计算。
注意不要输入太大的数,否则如果不进行P340=1的步骤而直接通过P1910进行电机动态参数辨识时,驱动器会输出较高的电压而导致电机电流超限。
1.5,设置是否进行电机参数计算,即P340如果选择“No calculation”,则P340=0;如果选择“Complete calculation without equivalent circuit diagram data”,则P340=3。
P340也可以在线修改。
1.6根据实际情况选择编码器1.7,选择是否进行电机参数辨识,即P1910此时电机的配置已经结束,可以保存参数并在线了。
第二步,在线状态下:2.1,电机参数及控制参数计算下载驱动部分,打开专家参数列表。
此时驱动的P340会自动置3(因为离线配置选择了Complete calculation without equivalent circuit diagram data),几秒钟之后自动置0。
此时我们可以手动将P340置1,完成静态参数辨识过程,此时会重新计算上述参数,并且还会计算等效电路参数,包括电机定子电阻及定子漏抗等。
第三步,Copy Ram to Rom,load to PG并再次离线设置P1990=1,即选择电机换向角偏移量的自动辨识第四步,在线并下载4.1,此时P431的值为初始值0度,Warning提示换向角偏移量检测已经激活,如下图所示:4.2,进入控制面板,为该驱动设置一个转速并启动:成,P1990会自动恢复为0,P431会得到一个值:Copy Ram to Rom并load to PG。
S120(CU310-2PM240-2)驱动第三方多极永磁同步电机案例分享

S120(CU310-2PM240-2)驱动第三方多极永磁同步电机案例分享S120驱动第三方多极永磁同步众所周知,伺服电机的驱动,一般都用自身同一品牌的驱动器进行控制,电机参数性能匹配度会很好,如果用第三方驱动器进行控制,可能会有很多麻烦;随着近些年永磁同步电机的发展,永磁同步电机的驱动控制,同样面临这样问题,而西门子S120驱动器,以其强大的控制功能、开放的参数体系,能够方便地驱动第三方永磁同步电机,充分地发挥永磁同步电机固有性能,实现传动与控制的完美结合。
永磁同步电机简介永磁同步电机转子采用永磁体,目前主要以钕铁硼作为永磁材料,由于永磁同步电机转子采用了永磁材料,进而简化了电机结构,去掉了转子的铜耗,提高了电机效率。
定子保持传统三相异步电机的结构。
<永磁同步电机结构原理图>永磁同步电机主要特点1.永磁同步电机,转子为永磁体,结构简单,不同于异步电机转子的笼形结构。
2.永磁同步电机,无需外部励磁,转子自身存在磁场。
3.永磁同步电机,能效等级高,更利于节约电能。
4.永磁同步电机,速度、转矩控制更加精确。
5.永磁同步电机,多极结构,可以实现低速大扭矩输出,直接驱动机械负载,省了减速箱。
S120驱动第三方永磁同步曳引机应用案例杭州智泊科技有限公司,主要从事立体车库电控部分的系统集成;在江西南昌的一个智能立体停车库项目中,采用西门子的S120驱动器以及第三方多极永磁同步曳引机;此次用户将同步曳引机用于立体车库,是客户首次创新应用方案,项目顺利完工并验收,得益于西门子S120开放的软件功能,精准的自学习优化功能,实现驱动第三方永磁同步电机,最终实现车盘升降平稳,停层精度高,使得车辆能够安全、舒适进出车库,用户体验非常好。
<现场同步曳引机及电控柜照片>驱动系统配置及方案优势同步驱动系统由CU310-2控制单元和PM240-2功率单元构成,这种配置是一个性价比非常高的方案。
•PM240-2功率单元基于SINAMICS 平台研发,与S120系统完全兼容;•PM240-2内置制动单元,只需要外配制动电阻,即可实现车盘下移时的能量消耗;•CU310-2是S120单轴传动的控制单元,软件资源丰富,参数开放,方便与第三方电机匹配;•CU310-2控制单元,集成各种优化算法,比如电流环、速度环等等,更适合高效发挥电机的性能。
S120调试总结
西门子S120(5#桥)调试总结整理人:韦同旺一..Drive-CLIQ电缆连接方式:如图1中为CU320与主起1#,主起2#,小车的Motor Module的Drive-CLiQ的连接方式如图2 中为CU320与大车变频器的连接方式Drive-CLiQ连接方式有两种:一种是串联方式(站点比较多的时候运用,但一个网口最多能够串联8个部件),一种为并联方式(上图使用的就是并联方式)备注:ALM的Drive-CLiQ以连接完成。
二.编码器的接线1.编码器采用的是HID100H Incremental编码器端接线方式为: Brown----------------Vcc DC24V正极White-----------------0V DC 负极Green-----------------A+ 信号线A+Yellow----------------B+ 信号线B+SMC30端接线方式为: X521端子号1 -----------A+ 信号线A+X521端子号3-----------B+ 信号线B+X531端子号1------------Vcc DC24V正极X531端子号2------------0V DC 负极三.ALM接线1.检查ALM接线若内部没有给预充电K4供电时,需外供AC 220V电源若内部没有风机供电电源时,需外供AC 220V电源若内部没有供DC 24V电源时,需外供DC 24V电源四.通讯及逆变器是否正常1.硬件组态下载到PLC中,打开STARTER软件,新建一个项目,首先使用网线使CU320与电脑进行连接。
在组态中,点击自动搜索后,会自动完成对CU320的搜索,完成后把项目上传到电脑中。
根据硬件组态中的地址进行设置并对CU320上的地址进行设置(STARTER 中会显示设置的方式)。
在硬件组态中查看通讯是否正常,正常时各CU320上DP指示灯常亮。
2.当DC24V送电后,检查各逆变器模块的指示灯,若显示红灯时则模块不正常。
S120变频器硬件配置及调试培训(工程师培训)

S120变频器硬件配置及调试培训(工程师培训)目录一、新建文件及设置通讯方式 (1)1、新建文件 (1)2、设置通讯方式 (2)3、选择接口参数 (2)4、点网络属性 (3)5、双击本地连接→点属性 (4)6、选择TCP/IP协议→点属性 (4)7、输入IP地址,子网掩码 (5)二、不带编码器手动组态 (6)三、带编码器自动项目组态 (12)四、调试 (18)五、重新组态更改DP通讯 (27)六、PLC组态与程序编写 (29)一、新建文件及设置通讯方式1、新建文件:点project(项目)→New(新建)→输入文件名→确定2、设置通讯方式Options(选项)→Set PG/PC interface(设置编程器/PC接口)3、选择接口参数TCP/IPIntel(R)82579LM→点属性4、点网络属性5、双击本地连接→点属性6、选择TCP/IP协议→点属性选择TCP/IP协议→点属性输入IP地址,子网掩码→点确定二、不带编码器手动组态1、方式一:双击Insert single drive unit(插入驱动装置)→选控制单元型号→CF卡版本号4.5→通讯方式IP→OK→点Accept(接受)→Close3、双击Configure drive unit(配置驱动单元)→选择驱动类型Vector(矢量)→Next→Next4、选择功率单元型号→Next→Next→Nextmotor(rotating)感应电机(旋转)→Next6、输入电机参数→Next→Next→Next→Next7、电机识别选:〔0〕Inhibited(不识别)→Next8、报文选择:端子控制为默认设置(999)Free telegram configuration with BICO(通过BICO进行自由报文配置),通讯控制选(1)Standard telegram1,PZD-2/2(标准报文1,PZD-2/2)→Next→Next9、点Finish(完成)10、选中S120_CU310_2_DP→点在线→钩上S120_CU310_2_DP→OK11、下载程序:点Download(下载)→YES→Close三、带编码器自动项目组态1、自动读取驱动装置:点击Accessible nodes(可访问节点)→钩选Accessible nodes→点Accept(接受)→Close2、点击Drive_unit_1→点在线→Connect to assigned devices(连接到指定的设备)→Close3、点Restore factory settings(恢复出厂设置)→YES4、双击Automatic Configuration(自动配置)→点击Start(自动组态)5、选择Vector矢量→→Close6、点GO OFFLINE(离线)7、点Configuration(配置)→点Configure DDS(配置DDS)→修改配置参数8、选择(21)Speed control带编码器矢量控制→Next→Next→Next→Next→Next8、输入电机参数→去掉电机辅助数据与等效数据2个钩→Next→Next9、修改编码器参数:选1024HTL A/B3005→Next10、电机识别选:〔0〕Inhibited(不识别)→Next→Next→Next→Finish(完成)7、点保存→点击Drive_unit_1→点在线→点下载→点YES1、STARTER面板控制:双击Control panel(控制面板)2、点Assume Control Priority(获取控制权)→点Accept(接受)3、钩选Enables(激活使能信号)→输入转速n=1500→点绿色Drive On(启动按钮)→转速0%—200%可调→点红色Drive OFF(停止按钮)→点黄色Give up control ptiority(取消控制权)→YES4、静态辩识和动态辩识:Commissioning(调试)→Stationary/turning measurement(静态/动态辩识)→Meas type里面选择如下Stationary measurement(静态辩识)不带负载Turning measurement during encoder less operation(不带编码器动态辩识)不带负载Turning measurement with encoder(带编码器动态辩识)不带负载Speed controller optremrezatreon for sensor lell operation(不带编码器速度环优化)带负载Speed controller optremrezatreon with sensor(带编码器速度环优化)带负载→Activate measurement(激活辩识)→Close5、Control panel(控制面板)→点Assume Control Priority(获取控制权)→点Accept(接受)→钩选Enables(激活使能信号)→点绿色Drive On(启动按钮)→Status:No measurement静态辩识完成。
S120驱动器配置心得
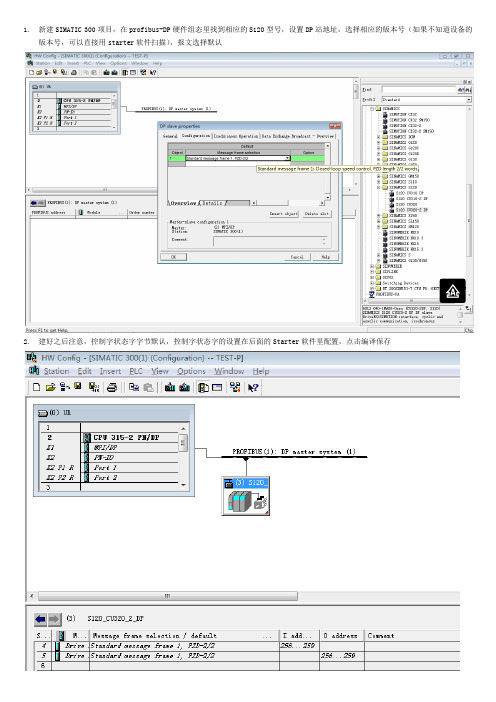
1.新建SIMATIC 300项目,在profibus-DP硬件组态里找到相应的S120型号,设置DP站地址,选择相应的版本号(如果不知道设备的版本号,可以直接用starter软件扫描),报文选择默认2.建好之后注意,控制字状态字字节默认,控制字状态字的设置在后面的Starter软件里配置,点击编译保存3.点击“configure network4.弹出以下画面,插入PG/PC,选择电脑的网卡,双击PG/PC图标, Interfaces-New-Introduction_Ethernet,OK之后弹出电脑的MAC和以太网地址,以太网地址设置成与所用电脑一致,并且和CPU在同一网段5.切换到Assignment,勾选所用电脑网卡,点击Assign,激活电脑网卡端口,点击OK,编译保存,再打开项目硬件组态,编译保存之后下载至CPU激活以太网口配置成功6.回到项目,双击Comissioning打开Starter软件6.点击“在线”-“Automatic Configuration”,配置好之后离线自动配置配置配置电机模块参数,Cnfigure DDS,勾选Basic Position功能,报文选择PZD111,,其余选择默认整流单元设置,去掉Line/DC-link identification at first switch-on ,报文选择PZD370配置Configure DDS报文选择111激活基本定位1展开Communication-Message frame configuration,可以看到总线的控制字状态字,地址之间不能有断开,可以通过右边的上下箭头调整到连续状态,点击set up address,把地址传送到STEP7的硬件配置报文结构设置地址再打开step7 hardware configuration,可以看到硬件的控制字状态字已经配置好了,编译保存download到CPU硬件地址再回到starter软件,点击在线之后,把以上的配置下载到控制器,控制单元输入输出,1:输入低电平有效,2:输入高电平有效,根据实际端子接线选择输入输出地址位,P2569后限位开关,P2570前限位开关1 2在homing界面,对于绝对值型编码器,执行perform absolute value calibration,可以把当前位置设为零位。
s120使用心得
s120使用心得S120调试常见问题汇总项目配置目前做S120项目配置时有starter和scout这2种常用软件,版本最好为V4.1以上,starter使用较多,现只对starter进行叙述。
打开starter软件后出现如下画面:点击project选项后选择new或new with wizard新建一个项目如果选择通过向导新建项目时会出现如下窗口1为离线配置项目,2为在线配置,3为打开已有项目如选择2在线配置时,先要将适配器连接至S120控制器,然后按照向导提示执行配置即可完成,适配器连接S120具体过程可参看S120调试手册。
选择1或选择new离线新建一个项目时,输入完项目名称和存储路径后会出现如下图示:点击插入一个控制单元后弹出如下窗口:1选择设备系列,2选择具体设备和型号,3版本号,4通讯方式和地址。
本例选择的是CU320控制器,配置完成后出现如下窗口:在驱动器选项下点击插入驱动器,在驱动器类型里选择类型:servo伺服和vector矢量,其他选项可自行填写。
如选择伺服控制后会出现如下窗口:图1在功能选择中,本例用到基本定位功能,如有其他要求,可选择相应选项,选择不同选项后会对后面配置有影响。
可参看S120调试手册。
控制类型选择带编码器速度反馈。
点击下一步后出现功率单元的配置如图:按照实物选择相应的电压等级,冷却方式和具体型号,配置完后出现如下窗口选择跟功率单元相匹配的适配器型号,此选项受前面控制器型号影响略有不同。
然后进行电机配置,由于是伺服控制,并选用西门子自己的电机,故选择带DRIVE-CLiQ 接口的电机,如是其它电机则选择相应的电机型号,然后对报闸控制进行设定。
下一步对编码器进行设定1为西门子伺服电机自带编码器,带drive-CliQ通讯口,上面配置电机时已设定,故系统自认定,选项灰色不可改变。
2为自定义编码器,如有需要可勾选,并在3处定义编码器具体型号。
并在下一选项中选择哪一编码器做定位控制用。
S120硬件结构及工作原理分析

S120硬件结构及工作原理分析变频器分类(1)根据变流环节不同分为:1. 交-直-交变频器先将频率固定的交流电“整流”成直流电,再把直流电“逆变”成频率任意可调的三相交流电。
2. 交-交变频器把频率固定的交流电直接转换成频率任意可调的交流电。
(2)变频器按其供电电压分为:低压变频器( 110V 220V 380V ) 、中压变频器( 500V660V 1140V ) 和高压变频器( 3KV3.3KV 6KV 6.6KV 10KV )。
(3)根据直流电路的储能环节(滤波方式)分为:1. 电压型变频器其储能元件为电容器。
中、小容量变频器以电压型变频器为主。
2. 电流型变频器其储能元件为电感线圈(4)变频器按其功能分为:恒转矩(恒功率)通用型变频器、平方转矩风机水泵节能型变频器、简易型变频器、迷你型变频调速器、通用型变频器、纺织专用型变频器、高频电主轴变频器、电梯专用变频器、直流输入型矿山电力机车用变频器、防爆变频器等。
最常用的为交直交电压型变频器变频器的工作原理变频器硬件组成电源模块,电机模块,控制单元-CU320,(采样部分,驱动部分)外围设备(制动单元,接口模块-通讯板,编码器)S120配置示意图控制单元CU320接口图CU320接线图通讯板实物图电机模块的接线图电机轴上安装的编码器转换模块编码器接口模块实物图SMC 30 的接线图及各管脚含义变频器工作原理系统通过以键盘智能控制芯片HD7279A为核心的键盘输入系统运行所需参数(频率也可以通过模拟给定),再通过DSP实时计算出脉宽,最终将PWM信号通过外围驱动电路,转化成能驱动功率模块IPM的信号,控制逆变器的输出。
同时DSP通过采样电路对系统实时采样,一方面监控系统工作状态,供LED显示,另一方面还实时检测系统故障,以便能及时地加以保护并诊断故障原因。
变频器的结构原理图逆变电路原理图硬件电路的结构本文研究开发的通用变频器采用交一直一交电压源型主电路结构形式,控制芯片是以TI公司的MS320LF2407ADSP为控制核心,硬件电路分为:主电路部分、控制电路部分、采样检测及保护电路部分。
S120控制普通交流电机(带绝对值编码器)的配置问题!
S120控制普通交流电机(带绝对值编码器)的配置问题!
问:现在我打算用S120控制一台3KW普通交流电机,电机带绝对值编码器,我初步的选型配置如下:1:PM340变频模块(4KW),2:CU310DP,3:SMC30,4:制动电阻,是否还需要DRIVE-CLIQ电缆,采购时还需要标注出具体的长度对吗?还需要其他配置吗?
另外,这个电机是推动一个滑座前进的,前进距离大概有十几米,可以利用上位机(比如WINCC)通过DP总线来控制S120实现电机行走到指定距离的功能吗?
如果使用按钮控制电机的正转,反转,变频器的故障复位,变频器内部相应的控制端子都是通过BOP20或者STARTER软件来定义的吗?有没有出厂默认设置(就像MM430,440那样)?
答:1、是否还需要DRIVE-CLIQ电缆,采购时还需要标注出具体的长度对吗——
当然需要DRIVE-CLIQ电缆。
不过,一般采购S120功率模块时,都会随装置附送一根DRIVE-CLIQ电缆,一个装置附送一根,其长度为一米左右。
你自己算算送的够不够用,如果不够则必须订购,采购时需要标注出具体的长度,不同的长度,其价钱是不一样的。
2、可以利用上位机通过DP总线来控制S120实现电机行走到指定距离的功能。
3、如果使用按钮控制电机的正转,反转,变频器的故障复位,变频器内部相应的控制端子都是通过BOP20或者STARTER软件来定义的吗?
有没有出厂默认设置——
变频器内部相应的控制端子都是通过操作面板或者STARTER软件来定义的,没有出厂默认设置。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1.新建SIMATIC 300项目,在profibus-DP硬件组态里找到相应的S120型号,设置DP站地址,选择相应的版本号(如果不知道设备的
版本号,可以直接用starter软件扫描),报文选择默认
2.建好之后注意,控制字状态字字节默认,控制字状态字的设置在后面的Starter软件里配置,点击编译保存
3. 点击“configure network
4.弹出以下画面,插入PG/PC,选择电脑的网卡,双击PG/PC图标, Interfaces-New-Introduction_Ethernet,OK之后弹出电脑的MAC
和以太网地址,以太网地址设置成与所用电脑一致,并且和CPU在同一网段
5.
.
切换到Assignment,勾选所用电脑网卡,点击Assign,激活电脑网卡端口,点击OK,编译保存,再打开项目硬件组态,编译保存之后下载至CPU
激活以太网口
配置成功
6.回到项目,双击Comissioning打开Starter软件
6.点击“在线”-“Automatic Configuration”,配置好之后离线
配置电机模块参数,Cnfigure DDS,勾选
PZD111,,其余选择默认
自动配置
配置
配置
Configure DDS 激活基本定位
报文选择111
整流单元设置,去掉Line/DC-link identification at first switch-on,报文选择PZD370
1
展开Communication-Message frame configuration,可以看到总线的控制字状态字,地址之间不能有断开,可以通过右边的上下箭头调
整到连续状态,点击set up address,把地址传送到STEP7的硬件配置
报文结构
设置地址
再打开step7 hardware configuration,可以看到硬件的控制字状态字已经配置好了,编译保存download到CPU
硬件地址
再回到starter软件,点击在线之后,把以上的配置下载到控制器,控制单元输入输出,1:输入低电平有效,2:输入高电平有效,根据实际端子接线选择输入输出地址位,P2569后限位开关,P2570前限位开关
1 2
在homing界面,对于绝对值型编码器,执行perform absolute value calibration,可以把当前位置设为零位。
执行绝对值校准
Jog画面,可以设置点动速度
正向点动速度
反向点动速度
Limit界面,可以设看到电机行程的软限位和硬限位,软限位就是设定的行程,硬限位即限位开关,还可以设置电机最大转速和加减速率
1.转速上限
2.加速度
3.减速度设定扭矩限定值,当电机运转扭矩超过限定值后会报警停机
扭矩限定值
Speed controller界面可以调整电机比例参数,对于转速控制没有严格要求的场合,调低数值可减缓电机调节速度偏差的时间,降低电机由于调整转速而造成的系统不稳定。
1.比例参数
以上参数都是在在线的情况下进行的配置,配置好后一定要执行copy RAM TO ROM这步操作,否则断电后数据会丢失此时通过starter控制面板可以直接控制电机
具体操作步骤如下:
1. 获取控制权限
2. 使能整流单元( 小功率的SLM整流模块不需要控制)
3. 使能轴
4. 设定速度
5. 启动电机
6. 停止电机
通过控制面板,可以检验组态数据是否正确,电机与编码器的方向是否正确,电机是否能平稳带动负载。
1 5 6 3 4
5。