某小型无人机空中风干扰模拟的简易算法与实现
无人机飞行控制算法设计与仿真分析
无人机飞行控制算法设计与仿真分析近年来,随着无人机技术的不断发展和应用需求的增长,无人机飞行控制算法的设计与仿真分析成为了一个热门的研究领域。
本文将深入探讨无人机飞行控制算法的设计原理和仿真分析方法。
无人机的飞行控制算法是指通过计算机对无人机进行精确的控制,使其能够稳定、准确地执行特定的飞行任务。
飞行控制算法的设计主要包括姿态控制、航迹控制和高度控制等方面。
其中,姿态控制是无人机最基本的控制方式,它以无人机的姿态为基准,通过引导飞行器的前后左右、上下运动来实现机体的平稳飞行。
航迹控制则是无人机在飞行过程中按照预定的路径进行规划和执行,通过不断优化路径规划算法来达到更高的飞行效率。
高度控制则是指在飞行过程中对无人机的高度进行精确控制,保持其稳定飞行在特定的高度。
设计一个高效、稳定的无人机飞行控制算法是一个复杂的工程问题。
首先,需要了解无人机的基本飞行原理和飞行动力学模型,以便于根据其特性进行合理的控制。
其次,需要选择合适的控制策略,常用的控制策略包括PID控制、模糊控制和自适应控制等。
PID控制是一种常用的控制方法,通过调节比例、积分和微分参数来实现对飞行器稳定性的控制。
模糊控制则是一种基于模糊推理的自适应控制算法,通过模糊规则库将模糊输入映射成模糊输出,从而实现对飞行器的控制。
自适应控制则是一种根据飞行器的动态变化自动调整控制策略的方法,通过对飞行器状态进行实时监测和分析,自动调整控制参数,从而实现对飞行器的精确控制。
在设计好无人机飞行控制算法后,需要进行仿真分析来验证该算法的有效性和性能。
仿真分析可以将设计的算法应用到虚拟的飞行场景中进行模拟,通过对飞行器的各项指标进行评估,来判断控制算法的稳定性和性能是否达到要求。
常用的仿真软件有MATLAB、Simulink、ROS等,通过建立适当的数学模型,并结合算法设计和控制策略,进行飞行场景的模拟和性能评估。
除了仿真分析,实际的物理试验也是验证无人机飞行控制算法有效性的重要手段。
微型无人机控制系统的设计与实现

微型无人机控制系统的设计与实现随着科技的不断进步,无人机的运用越来越广泛,其中微型无人机的应用更是愈发多样化。
微型无人机的优点在于体积小、重量轻,可以轻松进行控制和操控。
本文将介绍微型无人机的控制系统设计与实现。
一、传感器无人机的控制系统离不开传感器,传感器可以获取无人机周围环境的信息,并将其转化为数字信号。
对于微型无人机来说,传感器的选择对于后续的控制有着至关重要的作用。
以下是一些适合微型无人机的传感器:1.加速度计加速度计可以检测微型无人机在三维空间内的运动状态,包括速度、加速度等信息。
可以用于高精度的定位和位姿控制。
2.陀螺仪陀螺仪可以检测微型无人机的角速度,可以用于控制无人机的方向和姿态。
3.气压计气压计可以检测微型无人机的高度,可以用于高度控制和定高。
4.磁罗盘磁罗盘可以检测微型无人机与地球磁场的角度,可以用于地面定位和导航。
二、控制器控制器是无人机控制系统的核心部件,它接收传感器获取的数据,并进行计算和决策,控制无人机的飞行姿态和航向。
在微型无人机中,由于空间的限制,需要选择更小巧、更高效、更灵活的控制器。
以下是常用的微型无人机控制器:1.飞行控制器飞行控制器是无人机控制系统的核心,一般集成了多种传感器和控制器,可以通过USB接口连接计算机进行调参和升级。
其中,较为常见的控制器包括Naze32、CC3D、APM等。
2.遥控接收机遥控接收机是无人机控制系统的重要组成部分,可以通过信号接收器将遥控器发送的信号转化为数字信号,进而通过控制器进行控制。
相比于飞行控制器,遥控接收机尺寸更小,适合于微型无人机的控制。
三、电机驱动器电机驱动器是控制无人机电机的关键部件,能够将采集的数据转化为电流输出,从而控制无人机的飞行姿态。
针对微型无人机,需要选择轻量化、高效率、高频率的驱动器。
以下是常用的微型无人机电机驱动器:1.电调电调是微型无人机的核心驱动器,相当于电机的“变速器”,可以调整电机的转速和转向。
小型无人机通信干扰系统的研究

小型无人机通信干扰系统的研究随着无人机技术的迅速发展,小型无人机的使用越来越普遍。
然而,无人机的广泛应用也引发了一些问题,其中之一就是无人机的通信干扰问题。
由于小型无人机通信干扰可能导致通信中断、数据丢失等问题,因此研究小型无人机通信干扰系统成为了亟待解决的问题。
主要涉及以下几个方面:首先是干扰源分析。
无人机通信干扰的源头可以是无人机本身的通信设备,也可以是无人机附近的其他无线设备。
通过分析干扰源的类型、频率等参数,可以更好地了解干扰的特点,从而有针对性地采取措施。
其次是信号分析和检测。
对于小型无人机通信干扰系统,需要对干扰信号进行实时监测和分析。
通过对信号的频率、功率、调制方式等参数进行分析,可以及时发现干扰信号的存在,并采取相应的干预措施,以保证通信的可靠性。
再次是干扰抑制技术研究。
干扰抑制技术是解决小型无人机通信干扰问题的关键。
目前常用的干扰抑制技术包括频谱分析、自适应滤波、多径抑制等。
通过研究和改进这些技术,可以提高对小型无人机通信干扰的抑制效果,从而保障通信的正常进行。
最后是干扰对策制定。
针对小型无人机通信干扰问题,需要制定相应的对策,以减少干扰对通信系统的影响。
对策的制定包括了干扰源的隔离、通信设备的优化、信号处理算法的改进等方面。
只有制定出科学合理的对策,才能更好地应对小型无人机通信干扰问题。
综上所述,小型无人机通信干扰系统的研究是当前亟待解决的问题。
通过对干扰源的分析、信号的检测、干扰抑制技术的研究以及对策的制定,可以有效地减少小型无人机通信干扰对通信系统的影响,提高通信的可靠性和稳定性。
未来的研究还需要进一步完善和深入,以应对不断发展的无人机技术和应用需求。
无人机自主控制算法的研究与实现

无人机自主控制算法的研究与实现近年来,随着人工智能和自动化技术的不断发展,无人机被越来越广泛地应用于航空、农业、环保和军事等领域。
无人机的一大特点就是可以实现自主飞行,这既提高了工作效率,又可以减少人员伤亡风险。
对于无人机来说,自主控制算法是非常重要的,它的好坏直接决定着无人机的稳定性和安全性。
本文旨在介绍无人机自主控制算法的研究与实现,包括算法种类、实现方法以及应用场景等方面。
一、无人机自主控制算法种类目前,无人机自主控制算法主要分为三种:扰动辨识算法、模型参考自适应控制算法和基于自组织控制网络的算法。
1. 扰动辨识算法扰动辨识算法是一种基于最优化理论的控制方法,它可以对无人机进行模型辨识,然后根据辨识结果设计控制器。
扰动辨识算法的基本流程如下:(1)采集无人机的传感器数据,并进行信号处理,提取控制系统所需的状态量。
(2)建立无人机系统的数学模型,包括运动学模型和动力学模型。
(3)根据采集的数据估计无人机的扰动,包括外部扰动和内部扰动。
(4)使用最优化理论设计无人机的稳定反馈控制器,以保证无人机稳定飞行。
扰动辨识算法的优点是可以针对不同的无人机进行参数识别,从而实现针对性的控制;缺点是需要对无人机的数学模型进行建模和辨识,过程较为复杂。
2. 模型参考自适应控制算法模型参考自适应控制算法是一种基于模型参考控制理论的控制方法,它不需要事先建立无人机的精确模型,而是通过误差传递控制原理进行控制。
模型参考自适应控制算法的基本流程如下:(1)设置一个给定模型作为目标,将无人机的状态与给定模型的状态进行比较,得到误差信号。
(2)使用自适应控制器,调节无人机的控制输入,使误差信号趋近于零。
模型参考自适应控制算法的优点是不需要事先建立精确模型,适用于多种无人机结构;缺点是对控制器的精度要求较高,需要较大的计算量。
3. 基于自组织控制网络的算法基于自组织控制网络的算法是一种新兴的无人机控制方法,它借鉴了神经网络的思想,采用分布式控制策略,在网络中形成强大的自适应控制系统。
微小型无人机飞行控制系统的设计与实现

微小型无人机飞行控制系统的设计与实现摘要:为了分析无人机工作的实际特点,我们针对现阶段的微小型无人机飞行控制系统进行了细致化的研究,针对性的设计出了一套微笑无人机的自动飞行控制管理系统。
这项技术的研究,将无人机与各个自动控制系统之间的功能实现了串联,实现了数字化系统管理模式的优化。
本文通过建立起微小型无人机飞行控制系统的数字化模型,设计了无人机姿态保持以及轨迹控制管理基础规律,通过仿真实践结果分析观察可知,设计的控制效果达到了较为稳定的无人机操作运行功能要求,满足了整个系统工作的设计构思,是现阶段推动微小型无人机飞行控制系统构建的主要措施手段。
关键词:微小无人机;飞控软件;设计无人机近年来在我国的发展速度较快,可以有效地执行多种任务,在军用和民用领域都发挥这种积极地作用。
尤其小型无人机可以实现战术侦察、目标指示、精准投放、战果评估、探测分析、环境监控、人员搜救、通信中继等工作任务。
与有人驾驶的飞机之间进行比较,这种设备的工作除却储存量小、重量轻、速度快的优势之外,本身的机动性效果较好,能够满足各种工作需求,也能完成各项飞控工作的信号传输,满足系统设计的各种需求。
一、微小型无人机飞行控制系统的建模通过对系统进行综合分析,人们通过对微小型无人机飞行控制系统的模型构建,将具体问题系统化,通过数学模型进行分析,再利用计算机仿真实践的措施手段对相关的设计方案进行印证。
1、无人机坐标系的构建要对无人机实现建模,坐标系构建必不可少。
坐标系的构建是一切系统的参考依据,无人机之中的参数信息也是在坐标系之中构建的。
由于作用在无人机上的重力、空气动力以及外部动力等原因各有不同,因此在进行无人机坐标系构架的过程中需要不同的坐标系对整个无人机空间运作的状态进行确定和描述。
选择适当的坐标系完成数据参数的表示行为边界。
例如选择地面坐标系可以实现重力分析比较分析,集体坐标系可以实现发动机推力的比较分析,而空气动力则是在流动气流坐标系之中可以实现便捷的分析。
某小型低空高速无人机控制律设计与仿真
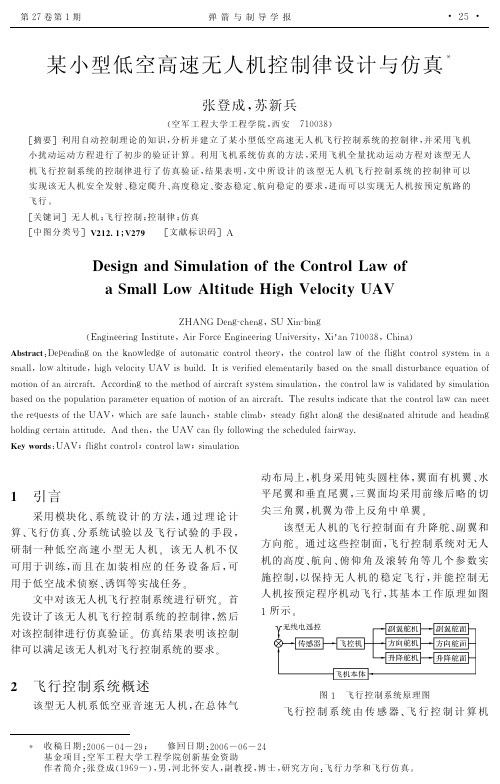
上述控制律可以采用飞机纵向小扰动运动 方程!详细内容请 参 阅 相 应 的 参 考 资 料"进 行 初 步 的 计 算 验 证 %计 算 结 果 如 图!和 图S所 示 !初 始
高度增量为 U#%C%即低 于预定 高度 #%C"#图 ! 表示的是在扰 动 结 束 后 飞 机 高 度 增 量 "W 和 速 度增量 "+ 的变化规律(图 S 表 示 的 是 在 扰 动 结 束后飞机的迎角增量 "%$俯仰角增量 "7 和航迹 倾角增量 "/的变化过程#
初始高度增量为表示的是在扰动结束后飞机的迎角增量和航迹倾角增量高度增量和速度增量迎角增量俯仰角增量和航迹倾角增量由上述计算结果可以看出该无人机的纵向控制律可以实现无人机的纵向高度速度和姿态稳定横航向控制律设计横航向的飞行控制采用副翼和方向舵联合控制的方式由副翼和方向舵联合进行横航向控制时副翼控制律设计基本思路为侧向距离偏差航向角偏差和滚转角为主反馈信号滚转角速度作为阻尼信号副翼偏角为控制输出以达到保持预定航向和姿态的目的控制律的计算公式为分别为飞机的实际航向角和指令航向角为飞机的实际滚转角由副翼和方向舵联合进行横航向控制时方向舵控制律设计基本思路为侧向距离偏差和航向角偏差为反馈信号方向舵偏角为控制输出用以协调控制航向控制律的计算公式为分别为飞机的实际航向角和指令航向角为飞机侧向距离偏差航向角偏差到副翼的传动比上述控制律可以采用飞机横航向小扰动运动方程进行初步的计算验证计算结果如图表示的是在扰动结束后飞机高度增量表示的是在扰动结束后飞机迎角增量表示的是在扰动结束后飞机侧向偏移距离表示的是在扰动结束后飞机侧滑角高度增量和速度增量迎角增量俯仰角增量和航迹倾角增量侧滑角偏航角和滚转角由上述计算结果可以看出该无人机的横航向控制律可以实现无人机收到横航向扰动后的纵向高度稳定和姿态稳定也可以实现横航向的航向稳定和姿态稳定既可以消除侧向偏移和保持预定航向并且速度也可以实现稳定
针对阵风干扰的低空无人机定高控制系统设计

第37卷第8期 计算机应用与软件Vol 37No.82020年8月 ComputerApplicationsandSoftwareAug.2020针对阵风干扰的低空无人机定高控制系统设计朱龙俊1 杨曦中2 樊江玲11(上海师范大学天华学院工学院 上海201815)2(中国航空无线电电子研究所 上海200233)收稿日期:2019-05-30。
上海市民办高校重大内涵建设项目(2016 SHNGE 05NH)。
朱龙俊,讲师,主研领域:过程控制,智能计算。
杨曦中,博士。
樊江玲,副教授。
摘 要 高度控制是无人机纵向飞行控制的重要组成部分。
针对受到阵风扰动的低空作业无人机,建立阵风、舵机系统和飞行控制系统的综合模型,设计一种基于高度差的比例+积分反馈的稳定控制策略,并以ITEA为指标,通过遗传算法对控制律参数进行优化和整定。
通过仿真验证,该系统能有效减缓阵风对无人机的影响,并且高度响应速度快,无稳态误差,可以通过操纵面的偏转维持在阵风扰动前的飞行高度。
关键词 阵风缓和 高度保持 纵向控制 定高系统 遗传算法中图分类号 TP391.9 文献标志码 A DOI:10.3969/j.issn.1000 386x.2020.08.015CONSTANT HEIGHTCONTROLSYSTEMFORUNMANNEDAERIALVEHICLEATLOWALTITUDEAIMINGATGUSTDISTURBANCEZhuLongjun1 YangXizhong2 FanJiangling11(SchoolofEngineering,ShanghaiNormalUniversityTianhuaCollege,Shanghai201815,China)2(AVICAeronauticalRadioElectronicsResearchInstitute,Shanghai200233,China)Abstract AltitudecontrolisanimportantpartofUAV(unmannedaerialvehicle)longitudinalflightcontrol.Anintegratedmodelofgust,steeringgearsystemandflightcontrolsystemisestablishedforlow altitudeUAVdisturbedbygust.Wedesignedastablecontrolstrategybasedonproportionalandintegralfeedbackofaltitudedifference.TheparametersofcontrollawwereoptimizedbyGA(geneticalgorithm)withITEA(integratedtimeabsoluteerror)index.ThesimulationresultsshowthatoursystemcaneffectivelymitigatetheimpactofgustonUAV.TheUAVhasfastaltituderesponseandnosteady stateerror,anditcanmaintaintheflightaltitudebeforegustdisturbancethroughthedeflectionofthecontrolsurface.Keywords Gustloadalleviation Altitudehold Longitudinalcontrol Constant heightsystem Geneticalgorithm0 引 言无人机相关技术的高速发展,使得无人机的能力日益全面,在许多领域扮演着越来越重要的角色。
无人机对风切变干扰的BSSA控制器的设计

在 忽 略 弹 性 形 变及振动的前提下, 四旋 S 无人意升 机的飞行运动可以近似地认为是六个自由度的刚体运 动, 即绕三个轴的转动和沿三个轴的线运动。针对此种 情况, , 可 以 利 用 牛 顿 -欧 拉 方 程 来 构 造 相 应 的 平 衡 方 程 式⑷:
文章编号: 1673-1549 (2017)06-0047-07
DOI : 10.11863/ j .suse .2017.06.09
无人机对风切变干扰的
BSSA控 制 器 的 设 计
徐建勋
(四川理工学院自动化与信息工程学院, 四 川 自 贡 643000)
摘 要 : 为了克服四旋翼无人直升机在飞行过程中受到风切变干扰而不稳定的问题, 设计出了反步
U1 LU2 -
y = -------------------------------------------------------------m
b ( 0)2 _ 0)4 ) b( — C O j+C 〇 3)
( 2)
-%,
-D ( C O j— C 〇 2+ C 〇 3— C 〇 4)-
箕中; 6是比例常数; W 为旋翼的转速; £>为旋翼_ 戀气 中的阻力系数。
图1
四旋翼无人直升机结构模型
2
风干扰下无人机的动力学模型
根据风切突事故分 析 统 计 数 据 , FAA ( _ 国联邦航
Vf
( siiupsimj/ + costpsinO)
+ 54)
{sirupsim ff + cos<psin 〇 )
y = ----------------------------------------m
航空航天中无人机避障算法的设计与实现

航空航天中无人机避障算法的设计与实现无人机技术的快速发展使其在航空航天领域扮演越来越重要的角色。
然而,无人机在空中飞行中需要面对各种复杂的环境和障碍物,如建筑物、电线、其他飞行器等,这些障碍物可能对无人机的飞行安全和任务执行造成威胁。
因此,设计和实现一种高效的无人机避障算法是至关重要的。
无人机避障算法的目标是使无人机能够自主感知和规避潜在障碍物,以确保其安全地完成任务并保护周围环境的安全。
这需要无人机能够实时获取环境信息,进行决策和控制,以避免碰撞。
设计和实现无人机避障算法需要考虑以下几个关键方面:1. 传感器技术:无人机需要配备高精度的传感器,如激光雷达、摄像头、超声波传感器等。
这些传感器能够实时获取无人机周围环境的数据,并用于判断障碍物的距离、形状和速度等信息。
2. 障碍物检测与识别:基于传感器数据,无人机需要能够检测和识别周围的障碍物。
这可以通过计算机视觉算法和深度学习技术实现,例如使用卷积神经网络(CNN)进行目标检测和分类,以识别飞行路径上的障碍物。
3. 路径规划与决策:无人机需要基于环境信息和对障碍物的检测结果,进行路径规划和决策。
路径规划算法可以使用A*算法、D*算法等,综合考虑路径长度、障碍物的位置和形状、飞行速度等因素,选择最优的飞行路径。
决策算法根据当前无人机状态和环境,选择合适的动作,例如转向、提升高度、减速等,以确保避开障碍物。
4. 控制与执行:设计无人机避障算法时需要考虑到控制器的设计。
控制器根据路径规划和决策的结果,控制无人机的动作执行。
无人机需要具备良好的动力系统和操控性能,能够快速、精确地响应避障算法的控制指令,调整飞行姿态和速度,以避免碰撞。
5. 实时性和鲁棒性:无人机避障算法需要具备实时性和鲁棒性。
实时性要求算法能够在有限的时间内对周围环境进行感知,并快速做出决策和控制。
鲁棒性则要求算法能够适应各种复杂的环境和障碍物形状,并在不同飞行条件下稳定执行。
除了上述关键方面外,无人机避障算法的设计和实现还需要考虑安全性、能耗优化、算法效率等因素。
无人机飞行控制算法的研究与实现

无人机飞行控制算法的研究与实现前言无人机在当今社会已经广泛应用,在航空、农业、环保等领域都得到了很好的应用。
其中无人机的飞行控制算法是无人机技术中非常重要的一环。
在无人机技术不断发展的过程中,飞行控制算法的研究与实现变得越来越重要。
本文主要介绍无人机飞行控制算法的研究与实现。
一、无人机飞行控制(一)控制理论模型在控制理论模型方面,主要分为PID控制、模型预测控制、自适应控制、模糊控制、神经网络控制等多种控制方式。
PID控制是最基本的控制方式,是一种反馈控制方式,通过不断调整控制量、积分项、导数项,使系统输出接近设定值。
而模型预测控制是一种控制系统建立模型,来对未来系统进行预测,然后通过控制输入进行控制,使系统输出与设定值接近。
自适应控制是可以自动调整自身控制策略的控制方式,通过实时调整控制器参数,使系统能够在不确定性环境中工作。
模糊控制可以对模糊的、不确定的系统进行控制,通过建立模糊控制器,通过一系列模糊规则将输入变量和输出变量进行关联,来实现对系统的稳定控制。
最后,神经网络控制能够对非线性、不确定的系统进行控制,适应不一样的环境。
(二)应用在无人机的控制中,通常会使用PID控制,并将其部署在硬件上,来制定无人机的飞行任务。
此外,模型预测控制和自适应控制也在无人机的控制系统中得到了应用。
同时,为了提高控制精度,许多专家学者也在无人机中尝试使用多种控制模型来提高飞行状态精度和效率。
二、无人机飞行控制算法的实现(一)算法设计首先,在设计无人机飞行控制算法时,需要确定控制器的控制策略。
在飞行任务的制定过程中,需要根据实际情况选择合适的控制策略。
在确定控制策略后,需要建立数学模型,对无人机飞行过程中的飞行参数进行建模。
此外,在建立数学模型时,需要注意无人机的硬件特性和空气动力学性能。
(二)代码实现在代码实现过程中,需要根据数学模型编写相应程序来控制无人机的飞行。
根据控制策略,可以编写出PID控制程序,模型预测控制程序、自适应控制程序、模糊控制程序或者神经网络控制程序。
无人机自主飞行控制算法的设计与实现

无人机自主飞行控制算法的设计与实现随着科技发展的不断推进,无人机技术也日益成熟。
无人机的自主飞行控制算法是实现其智能化、自动化操作的关键。
本文将着重探讨无人机自主飞行控制算法的设计与实现。
一、概述无人机自主飞行控制算法是指通过计算机技术和数学模型,实现无人机在无人控制的情况下,自主飞行、避障、航迹规划等自主控制操作的算法。
在实际操作中,无人机不仅需要在预设的飞行高度、速度、航线上自动飞行,而且还需要根据环境变化实时进行数据分析、识别、预测和应对,从而完成无人机的自主飞行控制。
二、无人机自主飞行控制算法的设计无人机自主飞行控制算法的设计需要从以下多个方面考虑。
1. 系统构架设计:构建稳定、可控、高效、灵活的系统框架,考虑到算法的维护性、扩展性和可重用性。
2. 传感器选择及优化:由于无人机的自主飞行过程需要大量的数据支撑,传感器选取和优化是一个非常关键的问题。
传感器类型包括GPS、惯性测量单元(IMU)、气压计等。
传感器的优化可以考虑到对噪声的滤波处理、精度提升等方面。
3. 航迹规划:继承计算机科学中路径规划算法的思想,无人机的航迹规划主要包括选择最佳路径、规划飞行高度、点、线等。
4. 避障算法:无人机在自主飞行时,很可能会遇到障碍物,因此设计避障算法也至关重要。
避障算法常用的方法是基于LIDAR扫描、视觉识别或者深度学习等。
5. 自适应控制算法:无人机的状况十分复杂,飞行时会受到气候、地形等多种因素的影响,因此设计自适应控制算法是可以确保无人机稳定运行的一项关键因素。
常用的算法有比例积分微分控制(PID)算法、自我调节控制(SRS)算法等。
三、无人机自主飞行控制算法的实现无人机自主飞行控制算法的实现需要依赖于现有的机器学习工具和编程语言,包括TensorFlow、Keras、Python等。
在实践中,需要分别实现不同的算法模块,并且通过数据集等信息来训练模型,从而实现数据预处理、模型训练、模型验证等一系列的流程。
风干扰下无人机自抗扰控制参数自整定

合。风场环境下无人机动力学模型为:
6 2m
= s ] (cos^os ) —_g —右 p'C””” 2
” N4+( ZZ gr-M””
+ .04 (ZZ”-m”+
g=
Z
-=C4 + ( Z _Z+) 9 - M”z
p=
Z
* = = + tan$( gsin * + r*)cos
$ = gcoss - rsin *
1复杂风场环境模型建立
无人机在室外飞行时,主要干扰元素来源于外界 环境中的风场,风场中存在气流扰动主要是风切变、离 散突风和大气紊流三种[13]&姿态控制的关键在于控 制器是否能够及时降低气流扰动带来的影响 ,因此需 建立风场模型进行研究分析,使控制参数设计具有针
收稿日期:2020-08 -04;修回日期:2020-08 -16 作者简介:石晓洁(1996—),女,河北邢台人,贵州大学硕士研究生,研究方向为机械工程,(E-mail) S1274093691 @163. com;通讯作者:蔡家斌
象输出易发生振荡,文献[9-12]采用粒子群算法、改进 克隆算法、鲸鱼优化算法和蚁群算法等对自抗扰控制 参数进行自整定,但只消除了内部扰动,未考虑实际飞 行环境中的干扰。
本文采用八旋翼无人机为研究对象,建立了风场 环境模型和在复杂气流扰动下的无人机动力学模型。 使用RBF神经网络实现自抗扰控制参数自整定,并与 传统PIA和反步法进行对比分析,结果表明优化后的 自抗扰控制对于无人机姿态控制具有较高的控制精度 和较好的抗风扰性能。
that Wo many ADRC parameters led to difficulty in design. The IAE and ITAE performance indexes are u2ed to uudgethetran2ientperformaneeand 2teady-2tateperformaneeoftheeontro ler, and itiproved that thenonlinearaetivedisturbaneereueetion eontro lerbased on RBFneuralnetwork hashighereontrolaeeura-
无人机防风编程实训报告

一、前言随着科技的不断发展,无人机技术已经广泛应用于军事、民用、科研等多个领域。
无人机在飞行过程中,常常会遇到风的影响,如风速过大、风向不稳定性等,这些因素都会对无人机的飞行安全造成威胁。
为了提高无人机在复杂气象条件下的飞行性能,本文通过对无人机防风编程实训的研究,探讨了无人机防风技术的实现方法。
二、实训背景与意义1. 实训背景无人机在飞行过程中,受到风的影响较大。
风速过大时,无人机的稳定性会降低,甚至可能导致失控;风速过小时,无人机的飞行速度和效率也会受到影响。
因此,研究无人机防风技术具有重要的现实意义。
2. 实训意义通过无人机防风编程实训,可以提高无人机在复杂气象条件下的飞行性能,保障无人机飞行的安全性;同时,有助于培养学生的编程能力和创新意识,为无人机技术的发展提供技术支持。
三、实训内容与技术要求1. 实训内容(1)无人机防风算法研究:分析无人机在风中的受力情况,研究无人机防风算法,提高无人机在风中的稳定性。
(2)无人机防风控制系统设计:根据防风算法,设计无人机防风控制系统,实现无人机在风中的稳定飞行。
(3)无人机防风仿真实验:利用仿真软件对无人机防风系统进行仿真实验,验证防风系统的性能。
2. 技术要求(1)熟练掌握无人机飞行原理和编程技术。
(2)了解无人机防风技术的基本原理。
(3)掌握无人机仿真软件的使用方法。
四、实训过程1. 无人机防风算法研究(1)分析无人机在风中的受力情况,确定无人机防风算法的研究方向。
(2)研究无人机在风中的稳定性和飞行性能,提出防风算法的改进措施。
2. 无人机防风控制系统设计(1)根据防风算法,设计无人机防风控制系统,包括传感器、控制器和执行器等部分。
(2)编写无人机防风控制程序,实现无人机在风中的稳定飞行。
3. 无人机防风仿真实验(1)利用仿真软件搭建无人机防风系统模型,设置仿真参数。
(2)进行仿真实验,观察无人机在风中的飞行性能,验证防风系统的性能。
五、实训结果与分析1. 实训结果通过无人机防风编程实训,成功实现了无人机在风中的稳定飞行。
基于L1导航算法的无人机空中拦截系统研究与实现
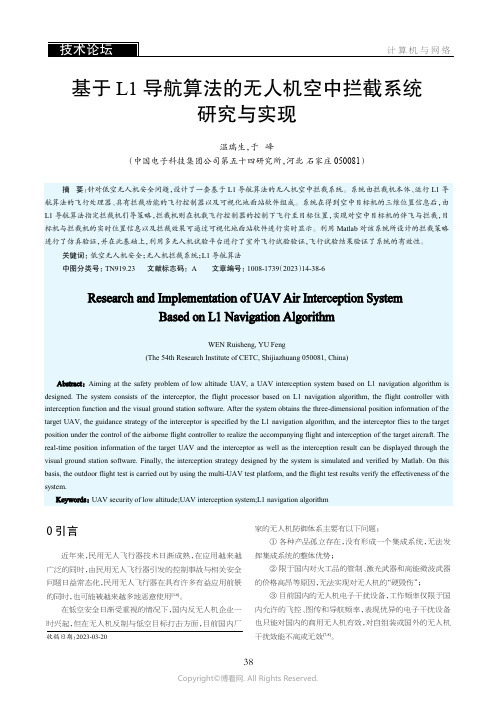
图11制导律示意由于横向加速度指令和跟踪这条瞬时圆弧的向心加速度这样可以得到1的长度为:。
因此可以得到横向加速度指令:。
所示的是该制导律在一个小的时间步长内的情况。
参考点位于飞行器速度方向的右边。
因此,在下一个时间步长中速度方向将会在加速度指令的作用下顺时针旋转。
由此可以得知,这个追踪算法能产生合适的横向加速度来跟踪任何的圆。
图3展示了若干步长下拦截算法产生轨迹的变仿真中=10m/s,1=40m),飞行器的起始位置离目标路但最终收敛到这个路径。
图2离散表示法:单个步长图3L1离散表示法表示若干个步长图5直线轨迹追踪示意在圆形轨迹追踪仿真中,拦截机的初始位置为(0,0行速度为12m/s,靶机的初始位置为(0,100),飞行半径为,飞行线速度为7.5m/s。
在直线轨迹的追踪仿真中,机的初始位置为(0,0),飞行速度设定为12m/s,靶机的初始位100,0),飞行速度为5m/s。
根据图4和图5的仿真结果拦截机均可以在一段时间内较好地追踪靶机,追踪时间由二者的速度差以及设定的1距离决定。
机载飞行控制器硬件部分飞行控制器是控制无人机完成起飞、空中飞行以及执行任务等整个飞行过程的核心系统。
在飞行器飞行过程中,飞行控制器通过各传感器实时获取飞行器的高度、速度、姿态、任务要求等信息按期望解算出飞行器的期望角度与各电机转速,图6飞行控制器实物图4圆形轨迹追踪示意图7飞行控制器工作流程3可视化地面站软件开发3.2地面站将目标机位置信息发送至拦截机的功能实现地面站软件通过3.1节所示步骤,读取到由靶机机载GPS 得到的目标机三维位置信息(纬度、经度、高度),并通过地面站界面显示出来。
在接收到靶机的三维位置信息后,地面站软件通过所设计的相应的数据发送端口,将靶机的三维位置信息通过所选端口发送至拦截机。
地面站与拦截机的通信协议(协议长度共30Byte,采用array数组表示)详细情况如表2所示。
表2地面站与拦截机机载GPS的通信协议综上,本文所设计的系统的工作流程可以总结为:首先,统通过GPS获取到靶机的位置信息;然后,由地面站作为中转,通过数传电台,实时地将靶机位置信息转发至拦截机;后,拦截机则根据自身位置信息,基于L1导航算法,拦截机在机载飞行控制器的引导下实现对靶机的伴飞与拦截。
低空可操作飞行器电磁干扰设备工作原理及典型参数
附录 A 电磁干扰设备工作原理及典型参数A.1 电磁干扰原理低空可操作飞行器(通指商用航拍无人机)由飞行器本体与遥控器组成。
飞行器本体与遥控器均自带接收机与发射机,飞行器本体接收机分别接收卫星定位信号(GPS、北斗、GLONASS)与遥控器发射机发送的飞控信号,卫星定位信号用于实现飞行的定位、悬停等功能,飞行器本体发射机将飞行器的位置信息、图象信号、工作状态等发送至遥控器接收机,操作者依据接收到的信息通过遥控器发射机发送飞控信号来控制飞行器的飞行与拍照等。
若飞行器失去飞控信号,将降落或返航。
电磁干扰设备是根据飞行器的操控原理,采用频率阻塞式干扰方式,即产生较大功率并且与飞行器所需要的定位信号、遥控信号同样频率的电磁信号,阻塞飞行器接收机的接收通道,使飞行器无法操控,迫使飞行器降落或返航。
卫星定位信号一般为GPS、北斗、GLONASS,其频率范围在1561MHz~1603MHz。
遥控信号与图传信号一般为840.5MHz~845MHz、902MHz~928MHz、2400MHz~2483MHz、5725 MHz~5850MHz。
目前电磁干扰设备分为固定式电磁干扰设备和移动式电磁干扰设备,固定式电磁干扰设备主要以携行箱形式体现,应用于定点区域的保护或流动场所的提前布控。
便携式电磁干扰设备主要以枪的形式体现,单人即可操作,携带与使用较为方便,在任何有需要的场合均可使用。
A.2 固定式电磁干扰设备应满足相应的技术参数A.2.1 工作通道与频率范围频段: ISM-800M 、 ISM-900M、 GNSS-1.5G、 ISM-2.4G、 ISM-5.8G1) 通道①:(0.820±0.02) GHz~(0.890±0.02)GHz2) 通道②:(0.900±0.02) GHz~(0.950±0.02)GHz3) 通道③:(1.500±0.1) GHz~(1.670±0.1)GHz;4) 通道④:(2.380±0.1) GHz~(2.500±0.1)GHz;5) 通道⑤:(5.700±0.1) GHz~(5.900±0.1)GHz。
微型飞行器桨翼气动干扰的数值模拟

微型飞行器桨翼气动干扰的数值模拟邓双厚;昂海松;肖天航;蔡红明【期刊名称】《航空计算技术》【年(卷),期】2012(042)002【摘要】对某一固定翼微型飞行器进行了桨翼气动干扰数值模拟研究,采用作用盘理论模拟真实桨盘的工作状态,通过时间平均稳态处理将非定常流场简化为准定常流场计算.利用FLUENT的用户自定义函数UDF实现作用盘前后压力、速度的变化.通过与无滑流影响下单独机身数值计算结果的比较,结果显示螺旋桨滑流廷缓了机体上表面的气流分离,增强气流再附着能力,飞机的失速迎角增加2°,升力、阻力、俯仰力矩系数增加2%~ 5%,升阻比减小2%~3%.%A computational study has been performed on the aerodynamic influence of a tracer propeller installed on a MAV ( micro air vehicle). An Actuator Disk model of a propeller which employs uniform pressure jump and velocities differences has been developed to simulate real propellers, hence, the inherently unsteady flow can be simplified into a quasi- steady one. FLUENT,a commercial CFD tool,has been used to investigate the flow around a low- aspect- ratio MAV with UDF ( users'defined function). Compared with a clear MAV, the propusion effect has been observed to retard the flow separation on the upper surface by 2 degrees and to promote the re- attachment of the separated flow,which contribute to the increases in lift,drag and pitching- up moment about 2% -5% with the actuator disk on.The lift- to- drag ratio has been observed to be slightly lowered by the introduction of the actuator disk.【总页数】4页(P20-23)【作者】邓双厚;昂海松;肖天航;蔡红明【作者单位】南京航空航天大学航空宇航学院,江苏南京210016;南京航空航天大学航空宇航学院,江苏南京210016;南京航空航天大学航空宇航学院,江苏南京210016;南京航空航天大学航空宇航学院,江苏南京210016【正文语种】中文【中图分类】V211【相关文献】1.多机起降旋翼间气动干扰数值模拟研究 [J], 牛嵩;田旭;徐宝石;胡偶2.基于N-S方程的悬停旋翼桨叶气动干扰数值模拟 [J], 李晓晖;熊峻江3.旋翼/机身气动干扰的数值模拟 [J], 江雄;肖中云;陈作斌;刘刚4.螺旋桨滑流与机翼气动干扰数值模拟研究 [J], 龚晓亮;杨永;夏贞锋5.基于运动嵌套网格的前飞旋翼桨叶气动干扰数值模拟 [J], 肖飞;熊峻江;冯涛因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
竺 = I s i +y v Co 蕊 n
v “ ‘ 、
o 弧 n + i? s/ +V( sCo ̄ j 抽蕊 i s SnCo ̄) :Cor s/一SH Qs s + C s C { n 、l t o8 Y o。+ s i m sc s ∞ ∞v n c n 8一 o9 on一 y +
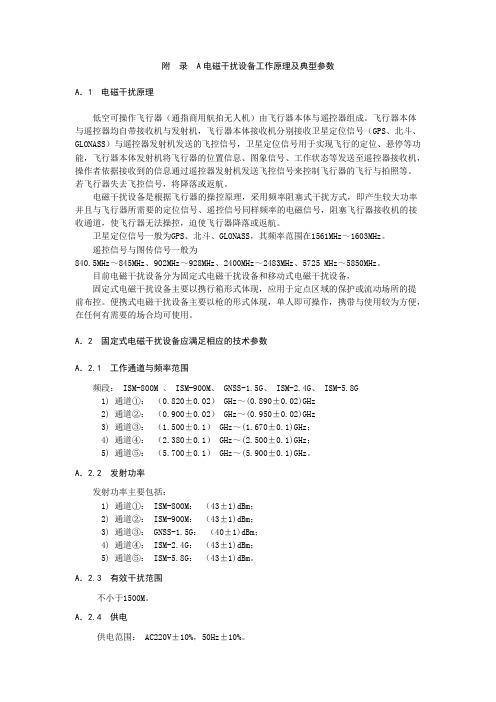
要 】文章详细介绍 了一种 对空 中风干扰在无人机机体 轴上 分解的 简易算法 ,将机体所 受到 的干扰风 分解 成各机体 轴
所受到的干扰 ,便于进行空 气动 力学方程 的计算。经仿真及 实际飞行验证 ,采用该算法所得结果 与实际飞行 结果相似 ,真实性
( )引 言 一
随着科学技术 的发展 以及军 事战略思想 的转变 ,无人 机 的运用在 军事、民用等领域不断 的扩大 ,需求也不断 的提高 , 无 人机的飞行 区域 从原本的单一 空域逐步扩 大到全空域 ,而
:
at c
m
( Q i +C of+愕 . , 一 一 S Cs l , )
+
( 3)
( )风干 扰算 法 三
飞机 在空 中飞行经 常要面对风干扰 ,干扰风 的风速 风 向
警去 【 , 1
,x - + - : 一+ 1 ( l 】 (1: , y I> l 2
鲁=士 M ++ 1 + 一 , ( (1; ( , 了 + I>) , : ) x. ) 一 】 -
() 5
=
在 高空,无人机会 受到不 同程度 的风干扰 ,如 何对抗风干扰
成 为无 人 机 控 制 参 数 设 计 中所 要 面对 的 重 要 问 题 。为 了 能 在
r 4、
对 飞机 的飞行 品质 以及飞行轨迹都 有很 大 的影 响,特 别在大
风 的情 况下 ,飞机 如何能保证 飞行 的安全性取决 于 自主控制 率 的设计 ,在地面 的仿真试验 中 模拟 各种风干扰成 为设计
【 收稿 1期 】2 0- 4 1 5 1 080-0
【 作者简介 】孙 晓媛 ( 9 0 ) ,江 苏南京人 ,南京航 空航 天大学 自动化学院助研 ,硕士 , 究方向为导航 制导与控 制、 1 8 一 ,女 研
[ 一(y-I) C + ( 一 ) I % O 】 x
() 6
地 面模 拟 出无人机在 空中风干扰状 态下 的姿态 变化 ,必须将
=
( c 一 0
)
() 7
风干扰 加入到空气 动力学方程里进 行仿真运算 ,通过地面 仿
真模拟 来设计无人机 的控制率参 数。本文 即以某小型无人 机 空中风干扰 的简 易算 法来进行阐述。
+ 嘶
( )无人 机 的非线 性 运动 方程 组 二
假 设无 人机为刚体 ,飞机在 空间的运动是 一个 六 自由度 的力学系统,其运动方 程 由两部分 组成 :一部 分是以运动 学
定律 为 基 础 的 动 力 学 方 程 组 , 由此 解 得 飞 机 相 对 于 机 体 坐 标
= —tO c o 一 g ( %C s
V S n,+V , o ? o 8一VSn o , x i9 C sC s i? s C 9 >
( 1 1)
( 苏联体制坐标 系)如下:
at
: ( P—Q o a o + Cs C
m
— oa if一" & 9一 CC s Sn ,g ’ l )
+ v
( ) 1
l , :V C s(l q / 73C sc 一( / 73 f o (c 一 ̄ 5 . o ( 2 o 5 . ) ) )
孙 晓媛
( 南京航 空航 天大学 自动化 学院 ,江苏 南京 2 0 1 ) 10 6
【 摘
高。 【 关键 词】无人 机 ;风干扰 ;算 法 【 中图分类号】V2 9. 7 ̄ 2 【 献标 识码 】A 文 【 章编 号】10 —15 (080 — 1 1 0 文 0 8 1 1 0 )5 0 2 — 2 2
解 后 的方 程 如 下 所 示 :
进行运算 ,可 以得 出加入风干扰后的飞机各姿态参数。
( )仿真 分析 四
在 M ta a l b开发的数字仿真平 台中, 对干扰风的模拟进行 仿真验证 。仿真平 台模拟无人机 的各项 飞行参数 ,根据这些 参数无人机运用控制率进行 自主 飞行 ,在加 入干扰风后 ,无
维普资讯
2 0 年第 5 08 期 ( 总第 1 5期 ) 0
大 众 科 技
DA ZHO NG KEJ
No. 2 0 5, 0 8
( u l ie o 1 5 C mu t lN .O ) av y
某小型无人机空 中风 干扰模拟 的简 易算法与实现
d X y
。 + Sr i 一 o i 。 + i i ol+ oti / V(iSn C 成 y 成 s C s n ) o f , g
( 0) 1
dY
=
系 、 、Z的速 度 向量、角度 向量 与角速度 向量;另一部 分
是通过 坐标变换得 出的运动学方程 组,确定 出飞机相对于地 面坐标 系 X ,Y ,Z d d d的位 置 向量 。1 2阶的非线性微分方程 组
建模 与仿真 。
.
1 21.
维普资讯
自主控制率 的必要手段。 风干扰 的模拟 主要将 风速风 向分解投影到各机体轴上 , 再结合空气动力学方程组里的三 向速度方程 ,解算 出最 终合 成后 的三 向速度 ,干扰风的分解 示意 图 ( 图 1 所 示,其分 如 )
m
:
其 中,状态变量 位置坐标 , 、 、 、
为地轴系 X .Y.Z 轴方 向的 d d d 、 , 、 l 、 吩 别为机体 9、
dt
( 2)
轴系 、 、Z轴方 向的速度 、旋转 角速 度、俯仰角 、滚转 角 和偏航角 ;攻角 a,侧滑 角 为相关连变量。