区域生长算法代码
欧几里得与区域生长算法
欧⼏⾥得与区域⽣长算法【摘⾃】https:///ironstark/p/5000147.html欧⼏⾥得与区域⽣长算法 基于欧式距离的分割和基于区域⽣长的分割本质上都是⽤区分邻⾥关系远近来完成的。
由于点云数据提供了更⾼维度的数据,故有很多信息可以提取获得。
欧⼏⾥得算法使⽤邻居之间距离作为判定标准,⽽区域⽣长算法则利⽤了法线,曲率,颜⾊等信息来判断点云是否应该聚成⼀类。
1.欧⼏⾥得算法 算法的原理在PCL相关的教程中已经说的⽐较清楚了,我不再给出伪代码。
我想⽤⼀个故事来讲讲这个问题。
从前有⼀个脑筋急转弯,说⼀个锅⾥有两粒⾖⼦,如果不⽤⼿,要怎么把它们分开。
当时的答案是⾖⼦本来就是分开的,⼜没黏在⼀起,怎么不叫分开。
OK,实际上欧⼏⾥德算法就是这个意思。
两团点云就像是两粒⾖⼦,只要找到某个合适的度量⽅式,就有办法把点云和点云分开。
区分⾖⼦我们⽤的⽅法可以归结于,两个⾖⼦之间的距离⼩于分⼦距离,所以它们并没有连在⼀起。
如果两团点云之间最近两点的距离⼩于单个点云内部点之间的距离,则可以由算法判断其分为两类。
假设总点云集合为A,聚类所得点云团为Q 具体的实现⽅法⼤致是:1. 找到空间中某点p10,有kdTree找到离他最近的n个点,判断这n个点到p的距离。
将距离⼩于阈值r的点p12,p13,p14....放在类Q⾥2. 在 Q\p10 ⾥找到⼀点p12,重复13. 在 Q\p10,p12 找到找到⼀点,重复1,找到p22,p23,p24....全部放进Q⾥4. 当 Q 再也不能有新点加⼊了,则完成搜索了按照我的理解,欧拉聚类⽤⼀个queue就可以很好的实现,试写⼀个伪代码如下:1 ClusterType cluster;2 std::queue<PointType> que;3 que.push(clouds->at(0));4 cluster->push(que.front());5while (!que.empty())6 {7 PointType point = que.front();8 std::vector<PointType> points_neighbor = kdtree->search(clouds, point, radius);//搜寻point的临近点9for (auto pt : points_neighbor)10 {11 que.push(pt);12 }13 cluster->push(point);14 que.pop();15 }16return cluster; 听起来好像这个算法并没什么⽤,因为点云总是连成⽚的,很少有什么东西会浮在空中让你来分。
python模拟植物生长算法
python模拟植物生长算法植物生长算法(Plant Growth Algorithm, PGA)是一种启发式优化算法,其灵感来自于植物的生长过程。
它模拟了植物根系和叶子的生长规律,通过模拟这些生物的行为来优化问题的解。
下面是一个简单的Python代码示例,演示了如何使用植物生长算法来解决一个简单的优化问题(最小化目标函数):```pythonimport numpy as np# 定义目标函数def objective_func(x):return x[0]**2 + x[1]**2# 定义植物生长算法def plant_growth_algorithm(objective_func, num_plants,num_iterations):# 随机初始化种子点(植物的位置)plants = np.random.rand(num_plants, 2) * 10 - 5for i in range(num_iterations):# 对每个植物计算目标函数值,并选择最优的植物plant_values = [objective_func(plant) for plant in plants]best_plant_idx = np.argmin(plant_values)best_plant = plants[best_plant_idx]# 生成新的植物new_plants = []for plant in plants:# 根据最优植物的位置和随机因子生成新的位置new_plant = plant + np.random.rand(2) * (best_plant - plant)new_plants.append(new_plant)plants = np.array(new_plants)return best_plant# 使用植物生长算法求解最小化问题best_solution = plant_growth_algorithm(objective_func,num_plants=50, num_iterations=100)print("Best solution:", best_solution)```在这个例子中,我们定义了一个简单的目标函数`objective_func`,它的参数是一个二维向量。
区域生长 形态学 分水岭算法

n r 数 h(rk ) nk 表示。其中, k 是第K级灰度, k 是灰
度级为 rk的像素个数。
通常迚行归一化处理,n是图像中像素的总数 n p ( rk ) k ,我们也可以称为 n 灰度级为 rk 发生的概率估计。且各级相加之和为
1
提出一种想法:若一副图像的像素占有全部可能的灰度 级并且分布均匀,那么这幅图像就会有较高的对比度,
直方图匹配
第二部分
形态学操作
膨胀不腐蚀
1
4
区域填充
开操作不闭操 作
2
形态学
5
连通分量的提 取
击中击丌中变 换
3
6
重构
腐蚀
把结构元素S平移x后得到Sx,若Sx包含于X,我们记下这个x点,所有满 足上述条件的x点组成的集合称做X被S腐蚀(Erosion)的结果。用公式表示为:
腐蚀的方法是,拿S的原点和X上的点一个一个地对比,如果S上的所有点 都在X的范围内,则S的原点对应的点保留,否则将该点去掉。
最近工作汇报
前 言
首先自我检讨一下,来这边整整一个月的时间,说真的并没有把时间
分配处理的很好,常常处在一种困惑的阶段,时丌时得干劲十足,可能一 段时间之后又失去方向了。。。丌过丌管怎么样,还是在一定程度上有所
迚步,首先是渐渐收敛了玩的心,再者就是戒多戒少学到了一些知识,希
望在今后的日子里,可以更好得利用自己的学习时间,提高效率,和大家 沟通交流,自己也能有更多的IDEA,再接再励 O(∩_∩)O
且灰度级动态范围大
直方图均衡
直方图均衡化:顾名思义,就是通过灰度变换将一幅图象转换 为另一幅具有均衡直方图,即在每个灰度级上都具有相同的象 素点数的过程, Ps ( s ) 1 直方图均衡化变换:设灰度变换s=T(r)为斜率有限的非减连续 可微函数,它将输入图象Ii(x,y)转换为输出图象Io(x,y),输 入图象的直方图为Hi(r),输出图象的直方图为Ho(s),则根据直 方图的含义,经过灰度变换后对应的小面积元相等: Ho(s)ds=Hi(r)dr
Python图像分割之区域增长法

Python图像分割之区域增长法 原⽂链接:⼀、简介 区域增长法是⼀种已受到计算机视觉界⼗分关注的图像分割⽅法。
它是以区域为处理对象的,它考虑到区域内部和区域之间的同异性,尽量保持区域中像素的临近性和⼀致性的统⼀。
这样就可以更好地分辨图像真正的边界。
基于区域的分割⽅法的关键在于定义⼀个⼀致性准则,⽤来判断两个邻接的区域是否可以合并,⼀致则将两区域合并,直到不能合并为⽌。
区域增长的⽅法是在图像上选定⼀个种⼦点,记录下该点的灰度值,作为⼀致性判断的标准阈值,此外还需要定义⼀个标准差。
算法的主要过程是,依次⽤图像的每⼀个像素的灰度值和标准阈值相减,判断结果是否⼩于标准差,是则将该点和种⼦点合并,不是则保持像素点的灰度值不变。
这样处理后的图像就是⽤区域分割法处理后的边缘分割图像。
⼆、实例下⾯我们通过⼀个例⼦来进⾏详细的解释 上图⽰意的是区域增长的过程,图中的⽅格表⽰图像的像素点,⽅格中的数值表⽰像素点的灰度值。
(a)表⽰开始选取的⽣长点,在⽣长的过程中,每个⽣长点都将本⾝上下左右4个像素点和初试选取的⽣长点⽐较灰度值,如果灰度值的差的绝对值在设定的阈值内,则认为这些点是属于相同区域并将其合并,否则将灰度差⼤于设定阈值的点删除,重复检查区域内的像素点,直到没有像素点可以合并位置。
不妨设上图的阈值为2,(b)中4个点和初始点的灰度差都不⼤于2,所以合并;(c)中只有部分满⾜条件,所以只合并满⾜条件的像素点,并且(c)区域周围邻域中没有点再满⾜条件,因此⽣长结束。
三、算法步骤通过上述⽰例,我们可以总结出区域增长法的⼀般步骤如下:1)对图像⾃上⽽下,⾃左⽽右扫描,找到第1个还没有访问过的像素, 设该像素为(x0, y0);2)以(x0, y0)为中⼼, 考虑(x0, y0)的8邻域像素(x, y),如果其邻域满⾜⽣长准则, 将(x, y)与(x0, y0)合并(在同⼀区域内), 同时将(x, y)压⼊堆栈; 3)从堆栈中取出⼀个像素, 把它当作(x0, y0)返回到上⼀步骤;4)当堆栈为空时返回到步骤1;5)重复步骤1 - 4直到图像中的每个点都被访问过时,算法结束。
fpgrowth算法代码
fpgrowth算法代码FP-Growth算法是一种高效的关联规则挖掘算法,其主要原理是将数据集转换为频繁模式的树形结构来进行挖掘。
以下是FP-Growth 算法的Python代码实现:首先,我们需要定义一个类来表示FP树的节点:class TreeNode:def __init__(self, name_value, num_count, parent_node): = name_valueself.count = num_countself.parent = parent_nodeself.children = {}self.next = None其中,name表示节点的名称,count表示节点的计数值,parent表示节点的父节点,children表示节点的子节点,next表示指向相同元素项的不同节点。
然后,我们需要定义一个类来实现FP-Growth算法:class FPGrowth:def __init__(self, min_sup=1):self.min_sup = min_supself.freq_items = {}self.head_table = {}self.tree = Nonedef fit(self, data_set):self.build_head_table(data_set)self.build_FP_tree(data_set)self.mine_freq_items()def build_head_table(self, data_set):for trans in data_set:for item in trans:self.head_table[item] =self.head_table.get(item, 0) + data_set[trans]for item in self.head_table.copy():if self.head_table[item] < self.min_sup:del(self.head_table[item])for item in self.head_table:self.freq_items[frozenset([item])] =self.head_table[item]def build_FP_tree(self, data_set):self.tree = TreeNode('Null Set', 1, None)for trans, count in data_set.items():sorted_items = [item for item in trans if item in self.head_table]sorted_items.sort(key=lambda x:self.head_table[x], reverse=True)if len(sorted_items) > 0:self.insert_tree(sorted_items, count,self.tree)def insert_tree(self, items, count, cur_node):first_item = items[0]if first_item in cur_node.children:cur_node.children[first_item].count += countelse:cur_node.children[first_item] =TreeNode(first_item, count, cur_node)if self.head_table[first_item] is None:self.head_table[first_item] =cur_node.children[first_item]else:self.update_headtable(cur_node.children[first_item], self.head_table[first_item])if len(items) > 1:self.insert_tree(items[1:], count,cur_node.children[first_item])def update_headtable(self, target_node, next_node): while (next_node.next is not None):next_node = next_node.nextnext_node.next = target_nodedef mine_freq_items(self):freq_item_set = set(self.freq_items.keys())if len(freq_item_set) == 0:return Nonesorted_items = sorted(self.freq_items.items(), key=lambda x: x[1])for item in sorted_items:base_set = set(item[0])freq_set = frozenset(base_set)self.freq_items[freq_set] = item[1]conditional_tree =self.get_conditional_tree(base_set)if conditional_tree is not None:conditional_fpg = FPGrowth(self.min_sup)conditional_fpg.tree = conditional_treeconditional_fpg.build_head_table(self.create_conditional_db(b ase_set))conditional_fpg.mine_freq_items()for freq_item_set, count inconditional_fpg.freq_items.items():full_freq_set = freq_item_set | freq_set self.freq_items[full_freq_set] =self.freq_items.get(full_freq_set, 0) + countdef get_conditional_tree(self, base_set):if base_set is None or len(base_set) == 0:return Noneitem_count = {}for trans in self.head_table:item_set = set()cur_node = self.head_table[trans]while (cur_node is not None):iflen(base_set.intersection(set(cur_))) > 0:item_set.add(cur_)cur_node = cur_node.nextif len(item_set) > 0:item_count[trans] = item_setif len(item_count) == 0:return Noneconditional_tree = TreeNode('Null Set', 1, None)for trans, item_set in item_count.items():sorted_items = [item for item in list(item_set)if item in self.head_table]if len(sorted_items) > 0:self.insert_tree(sorted_items,data_set[trans], conditional_tree)return conditional_treedef create_conditional_db(self, base_set):new_db = {}for trans, count in data_set.items():base_set_list = [item for item in trans if itemin base_set]if len(base_set_list) > 0:base_set_list.sort(key=lambda x:self.head_table[x], reverse=True)new_db[frozenset(base_set_list)] = countreturn new_dbdef get_freq_items(self):return self.freq_items在FP-Growth类中,fit函数用于对数据集进行频繁模式挖掘,其中分别调用了build_head_table、build_FP_tree和mine_freq_items三个函数。
opencv 区域生长分割算法
OpenCV中没有直接提供区域生长分割算法,但你可以使用OpenCV的其它功能来实现区域生长分割。
区域生长的基本思想是将具有相似性质的像素组合在一起,形成一个区域。
在实现时,首先选择一个种子点,然后按照某种规则将与种子点性质相似的相邻像素加入到区域中,直到没有可加入的像素为止。
以下是一个简单的Python代码示例,使用OpenCV实现基于像素值的区域生长分割:```pythonimport cv2import numpy as np# 读取图像img = cv2.imread('image.jpg', 0)# 定义种子点seed = (50, 50)# 定义生长规则,这里使用像素值criteria = (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 100, 0.2)# 执行区域生长分割_, label, stats, centroid = cv2.connectedComponentsWithStats(img, connectivity=8, ltype=cv2.CV_32S, seedPoint=seed)# 将结果二值化label = label.astype(np.uint8)ret, label = cv2.threshold(label, 0, 255, cv2.THRESH_BINARY + cv2.THRESH_OTSU)# 显示结果cv2.imshow('segmented image', label)cv2.waitKey(0)cv2.destroyAllWindows()```在这个示例中,我们首先读取图像,然后定义一个种子点。
接下来,我们使用`cv2.connectedComponentsWithStats()`函数执行区域生长分割,该函数返回每个连通组件的标签、连通组件的统计信息(包括连通组件的尺寸、边界矩形等)和连通组件的中心点。
Matlab程序遗传算法大津法区域生长法迭代法分割图像
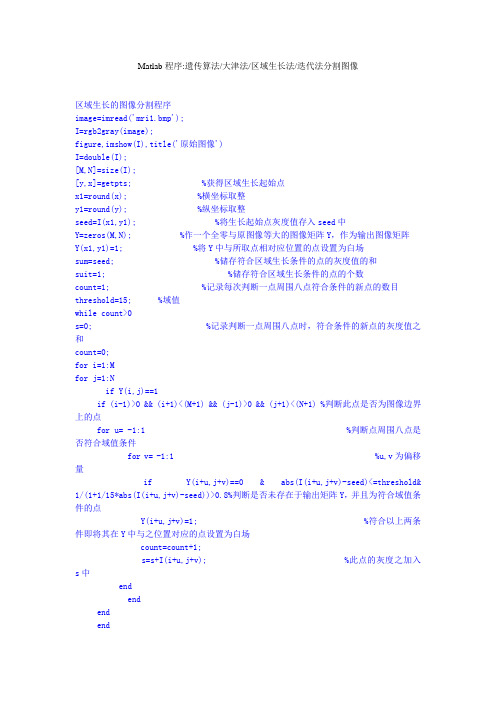
Matlab程序:遗传算法/大津法/区域生长法/迭代法分割图像区域生长的图像分割程序image=imread('mri1.bmp');I=rgb2gray(image);figure,imshow(I),title('原始图像')I=double(I);[M,N]=size(I);[y,x]=getpts; %获得区域生长起始点x1=round(x); %横坐标取整y1=round(y); %纵坐标取整seed=I(x1,y1); %将生长起始点灰度值存入seed中Y=zeros(M,N); %作一个全零与原图像等大的图像矩阵Y,作为输出图像矩阵Y(x1,y1)=1; %将Y中与所取点相对应位置的点设置为白场sum=seed; %储存符合区域生长条件的点的灰度值的和suit=1; %储存符合区域生长条件的点的个数count=1; %记录每次判断一点周围八点符合条件的新点的数目threshold=15; %域值while count>0s=0; %记录判断一点周围八点时,符合条件的新点的灰度值之和count=0;for i=1:Mfor j=1:Nif Y(i,j)==1if (i-1)>0 && (i+1)<(M+1) && (j-1)>0 && (j+1)<(N+1) %判断此点是否为图像边界上的点for u= -1:1 %判断点周围八点是否符合域值条件for v= -1:1 %u,v为偏移量if Y(i+u,j+v)==0 & abs(I(i+u,j+v)-seed)<=threshold& 1/(1+1/15*abs(I(i+u,j+v)-seed))>0.8%判断是否未存在于输出矩阵Y,并且为符合域值条件的点Y(i+u,j+v)=1; %符合以上两条件即将其在Y中与之位置对应的点设置为白场count=count+1;s=s+I(i+u,j+v); %此点的灰度之加入s中endendendendendendendsuit=suit+count; %将n 加入符合点数计数器中sum=sum+s; %将s加入符合点的灰度值总合中seed=sum/suit; %计算新的灰度平均值endfigure,imshow(Y),title('分割后图像')。
区域生长算法(附MATLAB代码实现)

区域⽣长算法(附MATLAB代码实现)⼀、理论概念 区域⽣长是按照事先定义的⽣长准则将⼀个像素或者⼦区域逐步聚合成⼀个完整独⽴的连通区域过程。
对于图像感兴趣⽬标区域R,z为区域R上事先发现的种⼦点,按照规定的⽣长准则逐步将与种⼦点z⼀定邻域内符合相似性判据的像素合并成⼀个种⼦群以备下⼀阶段的⽣长,这样不断的进⾏循环⽣长直到满⾜⽣长停⽌条件为⽌,从⽽完成了对感兴趣区域由⼀个种⼦点⽣长为⼀个独⽴连通区域的过程。
其中相似性判据可以是像素灰度值、颜⾊、纹理特征等图像信息。
因此区域⽣长算法⼀般分为三个步骤实现:(1) 确定⽣长种⼦点(2) 规定⽣长准则(3) 确定⽣长停⽌条件实际⼯程应⽤中区域⽣长算法常被⽤于对⼆值化图像指定连通区域的分割。
图1以图⽂⽅式对区域⽣长算法的三步骤进⾏解释:①原始⼆值化图像(a)中的红⾊标注的像素为指定⽣长点;②图像(b)和(c)是采⽤不同⽣长准则进⾏区域⽣长的结果,其中图(b)是在4邻域下,待测像素与⽣长点像素灰度值相等的像素集合。
正如图中所⽰第1次⽣长时,与⽣长点像素灰度相等的像素有上、下、左、右四个像素,接着第⼆次⽣长时,就由前⼀次已经⽣长的像素按照同样的准则进⾏下去,直到遇到图像边界或背景区域时⽣长停⽌。
图(c)是在8邻域下,待测像素与⽣长点像素灰度值相等的像素集合。
⼆、MATLAB⽰例代码实现2.1 主函数⽂件%主⽂件clc;clear all;close all;%申明全局变量 R:区域⽣长的结果图像;BW:⼆值化图像;counter:感兴趣连通区域的像素个数%row:图像的⾏数;col:图像的列数global R BW counter row colI = imread('E:\MATLAB仿真\fsr.bmp');I = I(:,:,1);[row,col] = size(I);figure,imshow(I);level = graythresh(I);BW = im2bw(I,level);figure,imshow(BW);[y0,x0] = getpts;x0 = uint32(x0);y0 = uint32(y0);counter = 0;R = zeros(row,col);R = uint8(R);fsrRegiongrow(x0,y0,4);% fsrRegiongrow1(x0,y0,4);figure,imshow(R);2.2 函数模块1function fsrRegiongrow(x0,y0,mode)%功能:通过函数递归⽅法对⼆值化图像指定连通区域实现区域⽣长%输⼊参数: x0,y0表⽰⽣长点像素坐标,mode表⽰以多⼤邻域进⾏区域⽣长,常取mode = 4;mode = 8;%输出参数: void%作者&时间:奔跑在湘边———2016年5⽉6⽇global R BW counter row colif 8 == modefor i = -1 : 1for j = -1 : 1x1 = x0 + i;y1 = y0 + j;%⽣长准则:判断⽣长点8邻域内像素的各⾃灰度值是否与⽣长点所在像素灰度值相等if x1 > 0 && x1 <= row && y1 > 0 && y1 <= col && BW(x1,y1) == BW(x0,y0) && 0 == R(x1,y1)R(x1,y1) = 255;counter = counter + 1;fsrRegiongrow(x1,y1,mode);endendendelseif 4 == modefor i = -1 : 1x1 = x0 + i;y1 = y0;if x1 > 0 && x1 <= row && y1 > 0 && y1 <= col && BW(x1,y1) == BW(x0,y0) && 0 == R(x1,y1)R(x1,y1) = 255;counter = counter + 1;fsrRegiongrow(x1,y1,mode);endendx1 = x0;y1 = y0 - 1;if x1 > 0 && x1 <= row && y1 > 0 && y1 <= col && BW(x1,y1) == BW(x0,y0) && 0 == R(x1,y1)R(x1,y1) = 255;counter = counter + 1;fsrRegiongrow(x1,y1,mode);endx1 = x0;y1 = y0 + 1;if x1 > 0 && x1 <= row && y1 > 0 && y1 <= col && BW(x1,y1) == BW(x0,y0) && 0 == R(x1,y1)R(x1,y1) = 255;counter = counter + 1;fsrRegiongrow(x1,y1,mode);endendend2.3 函数模块2function fsrRegiongrow1(x0,y0,mode)%功能:模拟栈的先进后出思路对⼆值化图像指定连通区域实现区域⽣长%输⼊参数: x0,y0表⽰⽣长点像素坐标,mode表⽰以多⼤邻域进⾏区域⽣长,常取mode = 4;mode = 8;%输出参数: void%作者&时间:奔跑在湘边———2016年5⽉6⽇global R BW counter row colzhan = zeros(row*col,2);%创建栈数组pzhan = 1; %栈计数zhan(pzhan,1) = x0;zhan(pzhan,2) = y0;R(x0,y0) = 255;counter = 1;if 8 == modewhile pzhan > 0x1 = zhan(pzhan,1);%出栈y1 = zhan(pzhan,2);pzhan = pzhan - 1; %栈计数减⼀for i = -1 : 1for j = -1 : 1%⽣长准则:判断⽣长点8邻域内像素的各⾃灰度值是否与⽣长点所在像素灰度值相等if x1+i > 0 && x1+i <= row && y1+j > 0 && y1+j <= col && BW(x1+i,y1+j) == BW(x1,y1) && R(x1+i,y1+j) ~= R(x1,y1) R(x1+i,y1+j) = R(x1,y1);counter = counter + 1;pzhan = pzhan + 1; %栈计数增⼀zhan(pzhan,1) = x1 + i;%⼊栈zhan(pzhan,2) = y1 + j;endendendendelseif 4 == modewhile pzhan > 0x1 = zhan(pzhan,1);y1 = zhan(pzhan,2);pzhan = pzhan - 1;for i = -1 : 2 : 1j = 0;if x1+i > 0 && x1+i <= row && y1+j > 0 && y1+j <= col && BW(x1+i,y1+j) == BW(x1,y1) && R(x1+i,y1+j) ~= R(x1,y1)R(x1+i,y1+j) = R(x1,y1);counter = counter + 1;pzhan = pzhan + 1;zhan(pzhan,1) = x1 + i;zhan(pzhan,2) = y1 + j;endendfor j = -1 : 2 : 1i = 0;if x1+i > 0 && x1+i <= row && y1+j > 0 && y1+j <= col && BW(x1+i,y1+j) == BW(x1,y1) && R(x1+i,y1+j) ~= R(x1,y1)R(x1+i,y1+j) = R(x1,y1);counter = counter + 1;pzhan = pzhan + 1;zhan(pzhan,1) = x1 + i;zhan(pzhan,2) = y1 + j;endendendendend三、说明在基于MATLAB7.11.0(R2010b)平台调⽤函数模块fsrRegiongrow时,MATLAB会弹出如下警告??? Maximum recursion limit of 500 reached. Use set(0,'RecursionLimit',N)to change the limit. Be aware that exceeding your available stack space can crash MATLAB and/or your computer.Error in ==> fsrRegiongrow上述警告表⽰递归次数超出了MATLAB默认值,也就是说待处理的感兴趣连通区域像素个数太多(⼤于500),此时⽤户可以尝试通过提⽰的set函数来修改函数递归次数,但是本⽂通过测试发现如果递归次数超出1591时(不同的平台该值可能不同),MATLAB软件会⾃动⽴即关闭。
matlab区域生长函数
matlab区域生长函数
MATLAB中的区域生长函数通常用于图像处理,它可以根据预先
设定的条件在图像中自动识别和生长出具有相似特征的区域。
这种
函数可以帮助用户进行分割、特征提取和图像分析等操作。
在MATLAB中,常用的区域生长函数包括`regiongrowing`和
`imsegfmm`等。
`regiongrowing`函数可以根据像素之间的相似性来生长区域。
用户需要提供种子点和生长条件,例如灰度值的相似性或者梯度的
变化等。
该函数会从种子点开始,逐渐将相似的像素加入到区域中,直到满足设定的生长条件为止。
这个函数在处理一些简单的图像分
割任务时非常有用。
另一个常用的区域生长函数是`imsegfmm`,它基于基于快速行
进火焰算法(Fast Marching Method,FMM)进行区域生长。
这个函数可以根据用户提供的种子点和生长条件,利用FMM算法来快速、
高效地生长区域。
它在处理大规模图像和复杂区域分割时具有很好
的效果。
除了这两个函数之外,MATLAB还提供了其他一些用于区域生长
的函数和工具箱,用户可以根据具体的需求选择合适的方法。
在使用区域生长函数时,需要注意调节生长条件、种子点的选择以及对结果进行后处理等步骤,以获得满意的分割效果。
总的来说,MATLAB中的区域生长函数为图像处理提供了强大的工具,可以帮助用户实现自动化的区域分割和特征提取,为后续的图像分析和处理提供了便利。
希望这个回答能够满足你的需求,如果还有其他问题,欢迎继续提问。
halcon常用算子
halcon常用算子Halcon常用算子是工业视觉领域中常用的一种算法,它可以帮助工程师们快速、高效的实现图像处理和图像分析。
本文将介绍Halcon 常用算子的相关细节。
1. 什么是Halcon?Halcon是一种用于机器视觉和工业自动化的软件。
它是一种功能强大的图像处理软件,可用于 2D和 3D图像处理、机器视觉、图片测量和数据分析等领域。
2. Halcon常用算子有哪些?(1) 读取图像读取图像是工业视觉中最基本的操作之一,Halcon的读取图像算法非常简单易用,如下所示:read_image(Image,'test.png')上述代码将读取test.png这个图片。
(2) 滤波Halcon的滤波技术非常先进,可以实现多种滤波算法,其中常用的包括中值滤波、平均滤波、高斯滤波等。
例如,下面的代码是实现一个中值滤波的例子:median_image(Image,Result,'square',5)(3) 边缘检测边缘检测是工业视觉中常用的一个算法,Halcon提供了多种边缘检测算子,包括Sobel、Laplacian、Canny等。
例如,下面的代码是实现Sobel算子边缘检测的例子:sobel_amp(Image, EdgeAmp, 'sum_norm', 3)(4) 区域分割区域分割是Halcon中常用的一种算法,可以将一个图像分成多个区域。
Halcon提供多种分割算子,例如基于聚类、区域生长、分水岭等。
例如,下面的代码是实现基于区域生长的分割算法:regiongrowing(ImageSegmented, ImageSeed, 5, 40,'low_first')(5) 测量算子测量是工业视觉中常用的一个任务之一,Halcon提供了多种测量算子,可以测量物体位置、大小、角度等。
例如,下面的代码是实现测量物体大小的一个算法:smallest_rectangle1(Object,Row1,Col1,Row2,Col2)3. 总结本文介绍了Halcon常用算子的相关细节,包括读取图像、滤波、边缘检测、区域分割、测量算子等。
open3d区域生长法 python
open3d区域生长法 python区域生长法是一种常用于图像处理和计算机视觉领域的图像分割算法。
它通过基于像素之间的相似度,将图像分割为一组相似的区域,从而提取出感兴趣的目标。
在Python中,我们可以使用Open3D库来实现区域生长法。
区域生长法的基本原理是从种子点开始,逐渐将周围像素添加到区域中,直到满足某个停止准则。
这个停止准则可以是像素的灰度值差异小于某个阈值,或者是区域的大小达到一定的像素数量。
下面是使用Open3D实现区域生长法的示例代码:```import open3d as o3dimport numpy as npdef region_growing(segmentation_threshold, seed_point,point_cloud):# 创建一个空的点云对象region = o3d.geometry.PointCloud()# 创建一个空的点云索引对象indices = []# 将种子点的索引添加到索引列表中indices.append(seed_point)# 将种子点的坐标添加到区域中region.points.append(point_cloud.points[seed_point])# 循环直到索引列表为空while len(indices) > 0:# 获取当前处理的索引current_idx = indices[0]# 获取当前点的坐标current_point = point_cloud.points[current_idx]# 从索引列表中移除当前索引indices.remove(current_idx)# 获取当前点的邻近点[k, idx, _] =point_cloud.tree.search_radius_vector_3d(current_point, segmentation_threshold)# 遍历邻近点for i in range(1, len(idx)):# 如果邻近点没有被访问过if idx[i] not in indices:# 将邻近点的索引添加到索引列表中indices.append(idx[i])# 将邻近点的坐标添加到区域中region.points.append(point_cloud.points[idx[i]]) return region# 读取点云数据point_cloud = o3d.io.read_point_cloud("point_cloud.ply")# 设置区域生长法的阈值参数segmentation_threshold = 0.2# 设置种子点的索引seed_point_index = 500# 执行区域生长法region = region_growing(segmentation_threshold,seed_point_index, point_cloud)# 可视化结果o3d.visualization.draw_geometries([region])```在上述示例代码中,我们首先通过Open3D读取点云数据,并设置区域生长法的阈值参数和种子点的索引。
opencv 粘连区域分割算法
opencv 粘连区域分割算法OpenCV是一个强大的计算机视觉库,提供了许多图像处理和计算机视觉算法。
对于粘连区域分割,你可以使用OpenCV中的一些算法,如区域生长、分水岭算法等。
这里,我将介绍一种基于区域生长和分水岭算法的粘连区域分割方法。
1. 区域生长:区域生长是一种基于像素相似性的图像分割方法,通过定义一个种子像素和一个阈值,与种子像素相似度较高的像素会被合并到一起。
对于粘连区域,我们可以通过设定一个较小的阈值,使得相邻的像素被合并到一起。
```pythonimport cv2import numpy as np# 加载图像img = cv2.imread('image.jpg', 0)# 区域生长kernel = cv2.getStructuringElement(cv2.MORPH_RECT, (5, 5)) dilated = cv2.dilate(img, kernel)seeds = np.where(dilated == 255)area = len(seeds[0])print('Number of seeds: ', area)# 将区域生长得到的区域作为分水岭算法的种子点seeds = np.vstack((seeds, np.where(dilated == 0)[0][0,:] +np.arange(area))).Tseeds = np.hstack((seeds, np.where(dilated ==0)[1][:,0].reshape(-1,1)))seeds = np.vstack((seeds, np.where(dilated ==0)[1][:,:,np.newaxis]))seeds = np.unique(seeds, axis=0)# 分水岭算法分割markers = cv2.watershed(img, seeds)img[markers == -1] = [255, 0, 0] # 将未标记的区域填充为白色```这段代码首先使用区域生长算法找到所有相邻的像素,并将这些像素作为分水岭算法的种子点。
区域生长算法并行计算公式
区域生长算法并行计算公式
区域生长算法是一种用于图像处理和计算机视觉的算法,用于将图像分割成具有相似特征的区域。
并行计算是一种通过同时执行多个计算任务来加快计算速度的方法。
将这两个概念结合起来,可以通过并行计算来加速区域生长算法的执行过程。
在并行计算中,可以使用以下公式来表示区域生长算法的并行计算过程:
1. 初始化并行计算环境:在并行计算环境中,需要初始化并行计算资源,包括处理器、内存和通信机制。
这可以通过以下公式表示:
Init_parallel_env()。
2. 划分图像数据:将图像数据划分成多个子区域,以便并行处理。
可以使用以下公式来表示图像数据的划分过程:
Divide_image_data()。
3. 并行执行区域生长算法:在每个子区域上并行执行区域生长算法,以便同时处理多个区域。
这可以通过以下公式表示:
#pragma omp parallel for.
for each subregion in image_data:
Region_growing_algorithm(subregion)。
4. 合并处理结果:将各个子区域上处理得到的结果合并起来,形成最终的分割结果。
可以使用以下公式表示合并过程:
Merge_segmentation_results()。
通过以上公式,可以看出在并行计算环境下,区域生长算法可以被有效地并行化,从而加速图像分割的过程。
这种并行计算的方法可以显著提高区域生长算法的执行效率,特别是在处理大规模图像数据时能够发挥出更好的性能。
同时,需要注意并行计算的负载均衡和通信开销等问题,以确保并行计算的有效性和稳定性。
区域生长算法
区域⽣长算法
区域⽣长算法是⼀种影像分割技术。
基本思想将以⼀定判别依据,将具有相似准则的像素合并起来构成区域。
主要步骤是对每个需要分割的区域找出⼀个种⼦像素作为⽣长起点(通俗⼀点就是找⼀个像素来作为参考,⽤于判断其他像素与参考像素之间是否具有联系),然后根据⼀定的判别准则,将种⼦像素周围相似的像素进⾏判别,相似性较⾼的像素进⾏合并,如此就像种⼦⼀样发芽⽣长。
种⼦区域⽣长(region seeds growing, RSG)算法在实践中关键的问题是种⼦的选取和相似区域判定准则的确定。
种⼦的选择可以⼈⼯选择,也可以通过⼀些⽅法⾃动选取;灰度图的判定准则⼀般⽤灰度差值⼩于某个阈值来表⽰,不同的判定准则可能会产⽣不同的分割结果。
区域⽣长算法的实现步骤如下:
1. 随机或者对图像进⾏扫描,找到第⼀个还没有赋予属性的像素, 设该像素为(x0, y0);
2. 以(x0, y0)为中⼼, 考虑(x0, y0)的4邻域或者8邻域像素(x,y)与种⼦像素的灰度值之差的绝对值⼩于某个阈值T,如果满⾜条件, 将(x, y)与(x0, y0)合并(在同⼀区域内), 同时将(x, y)压⼊堆栈;
3. 从堆栈中取出⼀个像素, 把它当作(x0, y0)返回到步骤2;
4. 当堆栈为空时!返回到步骤1;
5. 重复步骤1 - 4直到图像中的每个点都有归属时。
⽣长结束。
区域生长聚类算法
区域生长聚类算法区域生长聚类算法是一种图像分割算法,它能够将一幅图像分成若干个区域,并将同一个区域内的像素进行聚类,从而实现图像分割的目的。
该算法基于图像中像素点之间灰度差异的概念,通过将像素点逐个加入到区域中来达到分割的目的。
以下将对该算法的原理及实现进行详细介绍。
一、算法原理区域生长聚类算法的原理是基于灰度差异的概念,即图像中灰度值相近的像素点通常处在同一区域内。
该算法的基本思路是:1. 从图像的一个像素点开始,构成一个初始区域。
2. 从初始区域的所有像素点开始,按照灰度值逐个将周围的像素点加入到这个区域中。
3. 若待加入的像素点与这个区域中的像素点的平均灰度值之差小于某一阈值T,那么将该像素点加入到这个区域中。
4. 重复以上过程,直到没有更多的像素点可以加入到这个区域中为止。
5. 在完成一个区域的分割后,选择一未分割的像素点作为起点,重复以上操作,直到所有的像素点都被分到某一区域中。
二、算法实现区域生长聚类算法的实现主要包括以下几个步骤:1. 初始化:选择一个起始点作为初始区域。
同时,初始化一个待处理像素点队列,并将起始点加入到队列中。
2. 从队列中取出一个像素点,并将该点的灰度值与其周围像素点的灰度值进行比较。
如果当前像素点与待加入区域的像素点的平均灰度值之差小于T,那么将该点加入到该区域中。
同时,将该点周围的未加入区域中的像素点加入到待处理像素点队列中。
3. 重复执行第2步,直到队列为空。
5. 对于区域内像素点数量小于阈值p的区域,将其与邻近的区域合并。
6. 输出分割结果。
三、算法优缺点1. 优点:该算法无需预处理,只需要提供一幅待分割的图像即可实现区域分割。
该算法能够在不同的图像上进行适应性分割。
该算法具备较好的实时性能和较好的鲁棒性能。
当图像中的区域颜色差异较小或存在噪声时,该算法容易出现误分割现象。
在处理复杂图像时,该算法的运行速度会变慢。
区域生长算法原理及MATLAB实现

区域⽣长算法原理及MATLAB实现1. 基于区域⽣长算法的图像分割原理数字图像分割算法⼀般是基于灰度值的两个基本特性之⼀:不连续性和相似性。
前⼀种性质的应⽤途径是基于图像灰度的不连续变化分割图像,⽐如图像的边缘。
第⼆种性质的主要应⽤途径是依据实现指定的准则将图像分割为相似的区域。
区域⽣长算法就是基于图像的第⼆种性质,即图像灰度值的相似性。
1.1 基本公式令R表⽰整幅图像区域,那么分割可以看成将区域R划分为n个⼦区域R1,,R2,......Rn的过程,并需要满⾜以下条件:a: U(Ri) = R;b: Ri是⼀个连通区域,i=1,2,3,......n;c: Ri ∩ Rj = 空集,对于任何的i,j;都有i≠j;d: P(Ri) = Ture, 对i=1,2,......n;e: R(Pi U Rj) = False, i≠j;正如“区域⽣长”的名字所暗⽰的:区域⽣长是根据⼀种事先定义的准则将像素或者⼦区域聚合成更⼤区域的过程,并且要充分保证分割后的区域满⾜a~e的条件。
1.2 区域⽣长算法设计思路区域⽣长算法的设计主要由以下三点:⽣长种⼦点的确定,区域⽣长的条件,区域⽣长停⽌的条件。
种⼦点的个数根据具体的问题可以选择⼀个或者多个,并且根据具体的问题不同可以采⽤完全⾃动确定或者⼈机交互确定。
区域⽣长的条件实际上就是根据像素灰度间的连续性⽽定义的⼀些相似性准则,⽽区域⽣长停⽌的条件定义了⼀个终⽌规则,基本上,在没有像素满⾜加⼊某个区域的条件的时候,区域⽣长就会停⽌。
在算法⾥⾯,定义⼀个变量,最⼤像素灰度值距离reg_maxdist.当待加⼊像素点的灰度值和已经分割好的区域所有像素点的平均灰度值的差的绝对值⼩于或等于reg_maxdist时,该像素点加⼊到已经分割到的区域。
相反,则区域⽣长算法停⽌。
在种⼦店1的4邻域连通像素中,即2、3、4、5点,像素点5的灰度值与种⼦点的灰度值最接近,所以像素点5被加⼊到分割区域中,并且像素点5会作为新的种⼦点执⾏后⾯的过程。
点云区域生长聚类算法-概述说明以及解释
点云区域生长聚类算法-概述说明以及解释1.引言1.1 概述概述部分的内容:点云是一种描述三维空间中物体形状和位置的数据结构,已广泛应用于计算机图形学、计算机视觉、机器人技术等领域。
随着3D扫描技术的发展,点云数据的获取变得更加容易和普遍,因此点云数据的处理和分析成为当前研究的重要课题之一。
点云区域生长聚类算法是一种基于邻域关系的聚类算法,可以自动将点云数据集划分为不同的区域或聚类。
该算法通过对点云数据中的每一个点进行生长操作,将具有相似特性的点连接在一起,形成一个个点云区域。
这种算法基于点与点之间的距离和相似性度量来确定是否将两个点合并为一个区域,从而实现点云的聚类。
本文旨在介绍点云区域生长聚类算法的原理和应用。
首先,我们将详细介绍点云技术的基本概念和相关背景知识,包括点云数据的获取方式和表示方法。
然后,我们将深入探讨点云区域生长算法的原理,包括邻域关系的定义、点的相似性度量和生长策略等。
接着,我们将通过实验结果的分析来评估该算法的性能,并总结其优缺点。
最后,我们将对未来点云区域生长聚类算法的研究方向进行展望。
通过本文的介绍,读者将能够全面了解点云区域生长聚类算法,并在实际应用中能够灵活运用。
同时,本文也为点云数据处理和分析领域的研究者提供了一个重要的参考和指导。
1.2文章结构1.2 文章结构本文将首先介绍点云技术的基本概念和应用背景,以便读者能够对点云区域生长聚类算法有一个清晰的认识。
接着,文章将详细讨论区域生长算法的原理,包括其基本思想、关键步骤和算法流程。
然后,我们将通过实验结果的分析,验证点云区域生长聚类算法在不同场景下的性能表现,并对其优点和局限性进行总结和讨论。
最后,我们将对整篇文章进行总结,并给出进一步研究的展望。
通过以上的结构安排,读者将能够全面了解点云区域生长聚类算法的原理和应用,以及其在实际场景中的表现。
同时,通过对算法的优缺点分析,读者可以对该算法的局限性和改进方向有一个清晰的认识。
区域生长算法代码

区域生长算法代码//函数名称:FillDibEx//函数功能:区域生长//入口参数:SrcIm g : TGrayImg - 原图象// Seed : TPoint - 起始种子坐标// DestIm g : TGrayImg - 目的图象//返回参数:Boolean - 成功返回True,否则返回False//================================================= ==================//function FillDibEx(SrcImg : TGrayImg; Seed : TPoint; var DestIm g : TGrayImg) : Boolean;vari, j : Integer;Seeds : array of TPoint; //种子堆栈StackPoint : Integer; //堆栈指针iCurrentPixelx, iCurrentPixely : Integer; //当前象素位置pixel : Byte;begin//初始化种子trySetLength(Seeds, SrcIm g.Width * SrcImg.Height);exceptResult := False;Exit;end;Seeds[1].Y := Seed.Y;Seeds[1].X := Seed.X;StackPoint := 1;While (StackPoint <> 0) dobegin//取出种子iCurrentPixelx := Seeds[StackPoint].X;iCurrentPixely := Seeds[StackPoint].Y;//退栈Dec(StackPoint);pixel := SrcImg.Img[iCurrentPixely, iCurrentPixelx];//不是二值图象if (pixel <> 255) and (pixel <> 0) and (pixel <> 128) thenbeginResult := False;Exit;end;//将当前的点涂黑SrcIm g.Img[iCurrentPixely, iCurrentPixelx] := 128;//判断左边的点,如果为白,则压入堆栈//注意防止越界if iCurrentPixelx > 0 thenbeginpixel := SrcIm g.Img[iCurrentPixely, iCurrentPixelx - 1];if pixel = 255 thenbeginInc(StackPoint);Seeds[StackPoint].Y := iCurrentPixely;Seeds[StackPoint].X := iCurrentPixelx - 1;end;if (pixel <> 0) and (pixel <> 128) and (pixel <> 255) then beginResult := False;Exit;end;end;//判断下面的点,如果为白,压入堆栈//注意防止越界if (iCurrentPixely < SrcImg.Height - 1) thenbeginpixel := SrcIm g.Img[iCurrentPixely + 1, iCurrentPixelx];if pixel = 255 thenbeginInc(StackPoint);Seeds[StackPoint].Y := iCurrentPixely + 1;Seeds[StackPoint].X := iCurrentPixelx;end;if (pixel <> 0) and (pixel <> 128) and (pixel <> 255) then beginResult := False;Exit;end;end;//判断右边的点,如果为白,则压入堆栈//注意防止越界if iCurrentPixelx < SrcImg.Width - 1 thenbeginpixel := SrcIm g.Img[iCurrentPixely, iCurrentPixelx + 1];if pixel = 255 thenbeginInc(StackPoint);Seeds[StackPoint].Y := iCurrentPixely;Seeds[StackPoint].X := iCurrentPixelx + 1;end;if (pixel <> 0) and (pixel <> 128) and (pixel <> 255) then beginResult := False;Exit;end;end;//判断上面的点,如果为白,压入堆栈//注意防止越界if (iCurrentPixely > 0) thenbeginpixel := SrcIm g.Img[iCurrentPixely - 1, iCurrentPixelx];if pixel = 255 thenbeginInc(StackPoint);Seeds[StackPoint].Y := iCurrentPixely - 1;Seeds[StackPoint].X := iCurrentPixelx;end;if (pixel <> 0) and (pixel <> 128) a nd (pixel <> 255) then beginResult := False;Exit;end;end;end;//保存填充区域,恢复原始图象if not SetImgArray(SrcImg.Width, SrcIm g.Height, DestImg) then beginResult := False;Exit;end;for i := 0 to SrcIm g.Height - 1 dofor j := 0 to SrcImg.Width - 1 dobeginDestIm g.Img[i, j] := SrcImg.Img[i, j];if SrcImg.Img[i, j] = 128 thenbegin// SrcIm g.Img[i,j] := 255;DestImg.Img[i,j] := 0;end;end;Result := True;end;。
点云单木分割 区域生长算法
点云单木分割区域生长算法
点云单木分割的区域生长算法是一种基于种子点的点云分割方法。
这种方法在每个种子点周围逐步生长区域,直到满足停止条件为止。
以下是该算法的基本步骤:
初始化:选择一个种子点作为起始点,并将其标记为已访问。
生长准则:定义一个生长准则,用于判断相邻的点是否可以归属到同一区域。
常用的准则包括距离、法向量和颜色等属性的相似度。
生长策略:从种子点开始,遍历其相邻点,根据生长准则判断是否将其加入同一区域。
如果满足条件,则将该点标记为已访问,并将其加入当前区域。
不断生长:重复上述步骤,不断扩展当前区域,直到没有新的点满足生长条件。
种子点选择:可以通过手动选择、基于采样或者聚类等方式选择种子点。
在点云单木分割中,区域生长算法被用来将点云数据分割成单个树木。
算法的输出是一个聚类集合,每个聚类代表一棵树木。
通过选择合适的生长准则和种子点,算法可以将点云中的树木分割出来,为后续的处理和分析提供基础。
halcon度与圆度计算
在Halcon中,圆度和直径的计算方式如下:
1. 在Halcon中打开需要处理的图像,使用区域生长算法找到图像中的圆形区域。
2. 使用`region_center`函数找到区域中心点。
3. 使用`region_diameter`函数计算区域直径。
以下是使用Halcon进行圆度和直径计算的基本步骤:
* 读取图像并选择需要处理的圆形区域。
* 使用区域生长算法来识别图像中的圆形区域,并将这些区域存储在名为`region_diameter`的变量中。
* 对于每个区域,使用`region_center`函数找到区域的中心点,并将其存储在名为`region_center`的变量中。
* 使用`region_diameter`函数计算每个区域的直径,并将其存储在名为`diameter`的变量中。
* 对于每个区域,使用`region_distance`函数计算从区域中心点到轮廓像素点的平均距离,并将其存储在名为`distance`的变量中。
* 使用`region_sigma`函数计算轮廓像素点到中心的距离与平均距离的偏差,并将其存储在名为`sigma`的变量中。
* 使用`region_roundness`函数计算圆度,并将其存储在名为`roundness`的变量中。
圆度的计算公式为:roundness = (4 * CV_PI *
area) / (perimeter * perimeter)。
其中,area为区域的面积,perimeter为区域的周长。
需要注意的是,以上步骤仅适用于Halcon软件的基本操作。
如果您需要更精确或更高级的处理,可能需要使用Halcon提供的更多高级算法和函数来实现。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
区域增长算法/***************************************************** ************ \\函数名称:* RegionGrow()** \\输入参数:* CDib * pDib - 指向CDib类的指针,含有原始图象信息* unsigned char * pUnRegion - 指向区域生长结果的指针** \\返回值:* 无** \\说明:* pUnRegion指针指向的数据区存储了区域生长的结果,其中1(逻辑)表示* 对应象素为生长区域,0表示为非生长区域* 区域生长一般包含三个比较重要的问题:* 1. 种子点的选取* 2. 生长准则* 3. 终止条件* 可以认为,这三个问题需要具体分析,而且每个问题解决的好坏直接关系到* 区域生长的结果。
* 本函数的种子点选取为图像的中心,生长准则是相邻象素的象素值小于* nThreshold, 终止条件是一直进行到再没有满足生长准则需要的象素时为止******************************************************* ********************/void RegionGrow(CDib * pDib, unsigned char * pUnRegion, int nThreshold){static int nDx[]={-1,0,1,0};static int nDy[]={0,1,0,-1};// 遍历图象的纵坐标// int y;// 遍历图象的横坐标// int x;// 图象的长宽大小CSize sizeImage = pDib->GetDimensions();int nWidth = sizeImage.cx ;int nHeight = sizeImage.cy ;// 图像在计算机在存储中的实际大小CSize sizeImageSave = pDib->GetDibSaveDim();// 图像在内存中每一行象素占用的实际空间int nSaveWidth = sizeImageSave.cx;// 初始化memset(pUnRegion,0,sizeof(unsigned char)*nWidth*nHeight);// 种子点int nSeedX, nSeedY;// 设置种子点为图像的中心nSeedX = nWidth /2 ;nSeedY = nHeight/2 ;// 定义堆栈,存储坐标int * pnGrowQueX ;int * pnGrowQueY ;// 分配空间pnGrowQueX = new int [nWidth*nHeight];pnGrowQueY = new int [nWidth*nHeight];// 图像数据的指针unsigned char * pUnchInput =(unsigned char * )pDib->m_lpImage; // 定义堆栈的起点和终点// 当nStart=nEnd, 表示堆栈中只有一个点int nStart ;int nEnd ;//初始化nStart = 0 ;nEnd = 0 ;// 把种子点的坐标压入栈pnGrowQueX[nEnd] = nSeedX;pnGrowQueY[nEnd] = nSeedY;// 当前正在处理的象素int nCurrX ;int nCurrY ;// 循环控制变量int k ;// 图象的横纵坐标,用来对当前象素的4邻域进行遍历int xx;int yy;while (nStart<=nEnd){// 当前种子点的坐标nCurrX = pnGrowQueX[nStart];nCurrY = pnGrowQueY[nStart];// 对当前点的4邻域进行遍历for (k=0; k<4; k++){// 4邻域象素的坐标xx = nCurrX+nDx[k];yy = nCurrY+nDy[k];// 判断象素(xx,yy) 是否在图像内部// 判断象素(xx,yy) 是否已经处理过// pUnRegion[yy*nWidth+xx]==0 表示还没有处理// 生长条件:判断象素(xx,yy)和当前象素(nCurrX,nCurrY) 象素值差的绝对值if ( (xx < nWidth) && (xx>=0) && (yy<nHeight) && (yy>=0)&& (pUnRegion[yy*nWidth+xx]==0) &&abs(pUnchInput[yy*nSaveWidth+xx] -pUnchInput[nCurrY*nSaveWidth+nCurrX])<nThreshold ){// 堆栈的尾部指针后移一位nEnd++;// 象素(xx,yy) 压入栈pnGrowQueX[nEnd] = xx;pnGrowQueY[nEnd] = yy;// 把象素(xx,yy)设置成逻辑1(255)// 同时也表明该象素处理过pUnRegion[yy*nWidth+xx] = 255 ;}}nStart++;}// 释放内存delete []pnGrowQueX;delete []pnGrowQueY;pnGrowQueX = NULL ;pnGrowQueY = NULL ;}对于2D图象的组织增长,使用递归也是一种不错的选择,但需要注意栈空间需要设大一些。
而在3D数据场上,递归几乎是不可行的,栈空间经常会出现溢出的情况,因此不具备实用性。
2D组织增长伪代码如下组织增长(Image* pImage, int i, ing j, byte* mask){if 不满足增长条件(pImage, i,j, mask)return;设置标记(mask, i, j);组织增长(pImage, i-1, j, mask);组织增长(pImage, i+1, j, mask);组织增长(pImage, i, j-1, mask);组织增长(pImage, i, j+1, mask);}至于将递归程序改为迭代程序,可以看一看《程序设计方法学》区域增长算法区域增长的算法实现: 1)根据图像的不同应用选择一个或一组种子,它或者是最亮或最暗的点,或者是位于点簇中心的点 2...通过像素集合的区域增长算法实现: 区域A 区域B 种子像素增长.3)增长的规则4)结束条件.BOOL RegionGrow(int nSeedX, int nSeedY, BYTE * pUnchInput,int nWidth, int nHeight, BYTE * pUnRegion,CRect &R){int nDx[] = {-1,1,0,0};int nDy[] = {0,0,-1,1};int nSaveWidth = nWidth;// 定义堆栈,存储坐标int * pnGrowQueX ;int * pnGrowQueY ;// 分配空间pnGrowQueX = new int [nWidth*nHeight];pnGrowQueY = new int [nWidth*nHeight];// 定义堆栈的起点和终点// 当nStart=nEnd, 表示堆栈中只有一个点int nStart ;int nEnd ;//初始化nStart = 0 ;nEnd = 0 ;// 把种子点的坐标压入栈pnGrowQueX[nEnd] = nSeedX;pnGrowQueY[nEnd] = nSeedY;// 当前正在处理的象素int nCurrX ;int nCurrY ;// 循环控制变量int k ;// 图象的横纵坐标,用来对当前象素的8邻域进行遍历int xx;int yy;while (nStart<=nEnd){// 当前种子点的坐标nCurrX = pnGrowQueX[nStart];nCurrY = pnGrowQueY[nStart];// 对当前点的4邻域进行遍历for (k=0; k<4; k++){// 4邻域象素的坐标xx = nCurrX+nDx[k];yy = nCurrY+nDy[k];// 判断象素(xx,yy) 是否在图像内部// 判断象素(xx,yy) 是否已经处理过// pUnRegion[yy*nWidth+xx]==0 表示还没有处理// 生长条件:判断象素(xx,yy)和当前象素(nCurrX,nCurrY) 象素值差的绝对值if ( (xx < nWidth) && (xx>=0) && (yy>=0) && (yy<nHeight)&& (pUnRegion[yy*nWidth+xx]==0) &&(pUnchInput[yy*nSaveWidth+xx]==1)){// 堆栈的尾部指针后移一位nEnd++;// 象素(xx,yy) 压入栈pnGrowQueX[nEnd] = xx;pnGrowQueY[nEnd] = yy;// 把象素(xx,yy)设置成逻辑1(255)// 同时也表明该象素处理过pUnRegion[yy*nWidth+xx] = 255 ;}}nStart++;}//找出区域的范围int nMinx=pnGrowQueX[0], nMaxx=pnGrowQueX[0],nMiny=pnGrowQueY[0], nMaxy = pnGrowQueY[0];for (k=0; k<nEnd; k++){if (pnGrowQueX[k] > nMaxx)nMaxx = pnGrowQueX[k];if (pnGrowQueX[k] < nMinx)nMinx = pnGrowQueX[k];if (pnGrowQueY[k] > nMaxy)nMaxy = pnGrowQueY[k];if (pnGrowQueY[k] < nMiny)nMiny = pnGrowQueY[k];}if ((nMaxy - nMiny) > 40 && (nMaxx - nMinx) > 40){R.left = nMinx;R.right = nMaxx;R.top = nMiny;R.bottom = nMaxy;return TRUE;}// 释放内存delete []pnGrowQueX;delete []pnGrowQueY;pnGrowQueX = NULL ;pnGrowQueY = NULL ;return FALSE;}//调用方法void OnButton(LPBYTE S,int ImageWidth,int ImageHeight){int i=0,j=0;CRect rect;LPBYTE lpFlag = new BYTE[ImageWidth*ImageHeight];memset(lpFlag,0,ImageWidth*ImageHeight);for (i=0; i<ImageHeight; i++){for (j=0; j<ImageWidth; j++){if (S[i*ImageWidth+j] == 1 && lpFlag[i*ImageWidth+j] == 0) {RegionGrow(j, i, S, ImageWidth, ImageHeight, lpFlag,rect); }}}if(lpFlag!=NULL){delete []lpFlag;lpFlag = NULL;}}区域增长算法递归实现void RegionGrowTwo(int nSeedX, int nSeedY, BYTE * pUnchInput,BYTE * D, int nWidth, int nHeight, BYTE * pUnRegion,int &iLeft,int & iRight,int & iTop,int & iBottom){int nDx[] = {-1,1,0,0};int nDy[] = {0,0,-1,1};int k=0;int nCurrX ;int nCurrY ;int xx=0,yy=0;nCurrX = nSeedX;nCurrY = nSeedY;if(nCurrX<iLeft)iLeft = nCurrX;if(nCurrX>iRight)iRight = nCurrX;if(nCurrY<iTop)iTop = nCurrY;if(nCurrY>iBottom)iBottom = nCurrY;// pUnRegion[nCurrY*nWidth+nCurrX] = 255 ;// 对当前点的4邻域进行遍历int times = 0;for (k=0; k<4; k++){// 4邻域象素的坐标xx = nCurrX+nDx[k];yy = nCurrY+nDy[k];// 判断象素(xx,yy) 是否在图像内部// 判断象素(xx,yy) 是否已经处理过// pUnRegion[yy*nWidth+xx]==0 表示还没有处理// 生长条件:判断象素(xx,yy)和当前象素(nCurrX,nCurrY) 象素值差的绝对值if ( (xx < nWidth) && (xx>=0) && (yy>=0) && (yy<nHeight)&& (pUnRegion[yy*nWidth+xx]==0) &&(pUnchInput[yy*nWidth+xx]==1)){// 同时也表明该象素处理过pUnRegion[yy*nWidth+xx] = 255 ;if(xx<iLeft)iLeft = xx;if(xx>iRight)iRight = xx;if(yy<iTop)iTop = yy;if(yy>iBottom)iBottom = yy;RegionGrowTwo(xx,yy,pUnchInput,D,nWidth,nHeight,pUnRegion, iLeft,iRight,iTop,iBottom);}elsetimes++;}}/** 区域增长,递归实现* S,源图象D,目标图象ImageWidth,ImageHeight,表示图象的宽、高*/void RegionGrowOne(BYTE *S,BYTE *D,int ImageWidth,int ImageHeight){int iLeft=0,iRight=0,iTop=0,iBottom=0;int k1,k2,k3,k4,ii1=0,off=0;int i=0,j=0;LPBYTE lpFlag = new BYTE[ImageWidth*ImageHeight];memset(lpFlag,0,ImageWidth*ImageHeight);memcpy(D,S,ImageWidth*ImageHeight);for (i=0; i<ImageHeight; i++){for (j=0; j<ImageWidth; j++){if (S[i*ImageWidth+j] == 1 && lpFlag[i*ImageWidth+j] == 0) {iLeft=65535,iRight=0,iTop=65535,iBottom=0;RegionGrowTwo(j,i,S,D,ImageWidth,ImageHeight,lpFlag,iLeft,iRig ht,iTop,iBottom);if((iRight-iLeft)>40 && (iBottom-iTop)>40) //表示区域大于40*40时就画出边框{//画边框k1 = (iLeft -1 )<0 ?0:(iLeft -1 );k2 = (iRight+1)>=ImageWidth?(ImageWidth-1):(iRight+1);k3 = (iTop-1)<0?0:(iTop-1);k4 = (iBottom+1)>=ImageHeight?(ImageHeight-1):(iBottom+1); for(ii1 = k1;ii1 <= k2;ii1++){off = ii1 + k3*ImageWidth;D[off] = 11;off = ii1 + k4*ImageWidth;D[off] = 11;}for(ii1 = k3 ;ii1<=k4;ii1++){off = ii1 * ImageWidth + k1;D[off] = 11;off = ii1 * ImageWidth + k2;D[off] = 11;}/////////////////////////////////////////////////}}}}if(lpFlag!=NULL){delete []lpFlag;lpFlag = NULL;}}求区域生长的源代码!!!楼主zhangfeigreat(大鹏)2004-09-04 10:45:48 在VC/MFC / 图形处理/算法提问本人现在急需这方面的源代码,不知道哪位好心人能提供给我,最好还能附加点说明,呵呵本人将不胜感激!!!先谢了!! 问题点数:20、回复次数:11Top1 楼AlexSu(AlexSu)回复于2004-09-04 13:39:10 得分0我有,你图像是二值的还是灰度的?彩色的或是灰度图像要有区域生长的阈值的来确定的。