基于Taylor展开的纯滞后系统增益自适应内模PID控制
时滞系统PID控制器内模整定方法的扩展
ZN : K c = 0. 91; T i = 2. 75; T d = 0. 68。CC: K c = 0. 91; T i = 3. 03; T d = 0. 53。
图 3 P ID 控制器整定公式比较 (Η= 0. 2) 图 4 P ID 控制器整定公式比较 (Η= 2)
根据图 3 和图 4 的比较结果, 对于一阶加时滞系统采用 P ID 控制器, 使用本文提出的参数 整定方法, 其优越性是明显的。
摘 要 基于内模控制 ( IM C) 的 P ID 控制器设计方法只有一个整定参数, 其整定参数直接与闭 环响应速度和控制回路的鲁棒性有关。 对于时滞系统, 如果使用非对称的二阶 Pade 近似代替, 则能导出一个简单的二阶控制器形式, 而不会使控制器变得复杂, 并且模型匹配和控制器整定 将获得有意义的改善, 特别是对时滞较大的系统。 关键词 P ID 控制器参数整定, 内模控制, 非对称 Pade 近似 分类号 T P13
数无量纲时滞时间; Κ Η则是决定闭环系Η T 和N 之间的关系, 可以图形的方式给出, 如图 2 所示。其中,
噪声滤波器系数N 取 3, 5 和 10。
通过方程 (6) 和图 2 可以得到以下几点: 1) 当 Η T → ∞ 时, Κ Η= Χ2 ∆= 0. 3225; 2) 当N
1998年
关于扩展内模整定方法, 可以得到如下几点结论: 1) 对于一阶加纯滞后系统, 不需要选择滤波器参数
Κ, 而是通过给定的 N 值由方程 (6) 给出。对于不同的系 统或不同的控制要求, 可考虑适当地修正参数 Χ1, Χ2 和 ∆。
2) 由方程 (4) 和 (5) 看到, 对于一阶加纯滞后系统, 扩展内模整定方法设计的 P ID 控制器无需前置滤波器。
纯滞后控制技术教学文案

N=τ/T (τ-纯滞后时间,T -采样周期)
每采样一次,把 m(k) 记入 0 单元,同时把 0 单元原来存放 数据移到 1 单元,1 单元原来存放数据移到2单元……以此类 推。从 N 单元输出的信号,就是滞后N 个采样周期的 m(k- N) 信号。
r(t) + -
e1(t) S
e1(k) + -
y (k)
e2(k)
u(k) S
PID
1 e s s
Gp (s)(1 e s )
1 e Ts S
y(t)
Gp (s)e s
5.3.2 达林算法
在工业过程(如热工、化工)控制中,由于物料或能量的传输 延迟,许多被控制对象具有纯滞后性质。对象的这种纯滞后 性质常引起系统产生超调或者振荡。
y ( k ) a y ( k 1 ) b [ u ( k 1 ) u ( k N 1 ) ]
(3)计算偏差 e2(k) e2(k)e1(k)y(k)
(4)计算控制器的输出 u(k) 当控制器采用 PID 控制算法时,则
其中
u (k) u (k 1 ) u (k)
u(k)K P [e2(k)e2(k 1 )]K Ie2(k) K D [e2(k)2e2(k1 )e2(k2)]
纯滞后控制技术
史密斯预估控制原理
r(t) +
e(t)
-
u(t)
y(t)
D(s)
Gp (s)e s
图5.3.1 带纯滞后环节的控制系统
D(s) 表示调节器(控制器)的传递函数; Gp(s) e-τs 表示被控对象的传递函数; Gp(s) 为被控对象中不包含纯滞后部分的传递函数; e -τs 为被控对象纯滞后部分的传递函数。
大纯滞后系统的一种PID预估控制方法
二 、 估 控 制 方 法 预
鋈
萋
曩
圣
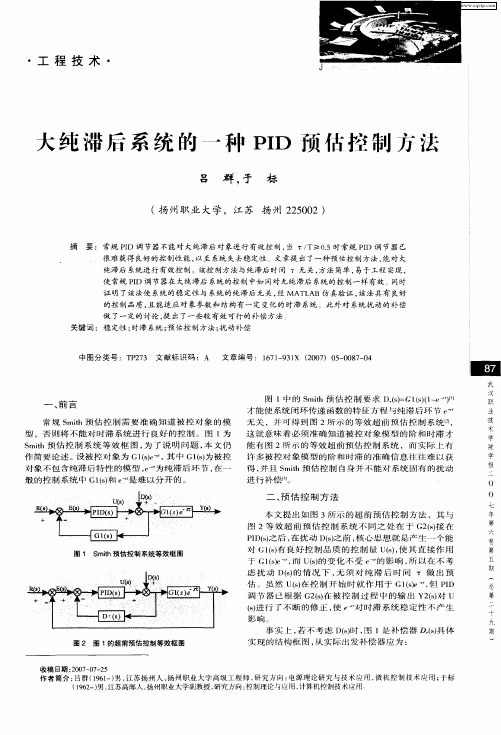
本 文 提 出 如 图 3所 示 的 超 前 预估 控 制 方 法 ,其 与
图 2等 效 超 前 预 估 控 制 系 统 不 同 之 处 在 于 G ( 接 在 2s )
PDs 后 , 扰 动 Ds 前 , 心 思 想 就 是 产 生一 个 能 I () 之 在 () 之 核
常 规 S t 估 控 制 需 要 准 确 知 道 被 控 对 象 的 模 mi h预 型 ,否 则 将 不 能 对 时 滞 系 统 进 行 良好 的控 制 。 图 1为 S t 估控 制 系统等效 框 图 , 了说 明问题 , 文仍 mi h预 为 本 作 简 要 论 述 。设 被 控 对 象 为 GI )一, 中 G1s为被 控 (e 其 s ( ) 对 象 不 包 含 纯 滞 后 特 性 的模 型 ,一为 纯 滞 后 环 节 , 一 e 在 般 的控 制 系统 中 G1 ) e ( 和 是 难 以分 开 的 。 s
T=10 2 0秒 。仿 真 结 果 如 图 6所 示 。
G1s 预 估 , 1的 闭环 传 函 G ( ) 下 : (的 ) 图 s 如
G()1 五 B = 丽 PDs se s I1 l ) (G )) ( ( )
一
 ̄ "
+
P, 云
_ i
:
) 二 : (1 1 1 P D( G ( + I s[ ) G () 】… + I s 2s PD( G1 e ) ) ) - 2se
维普资讯
・
工 程 技 术 ・
大 纯 滞 后 系 统 的 一 种 P D 预 估 控 制 方 法 I
吕 群, 于 标
( 州职 业大学 ,江苏 扬 州 2 5 0 扬 2 0 2)
内模控制介绍

内模控制内模控制是一种基于过程数学模型进行控制器设计的新型控制策略。
它与史,控制器设计可由过程模型直接求取。
密斯预估控制很相似,有一个被称为内部模型的过程模型设计简单、控制性能好、鲁棒性强,并且便于系统分析。
内模控制方法由Garcia 和Morari 于1982年首先正式提出。
可以和许多其它控制方式相结合,如内模控制与神经网络、内模控制与模糊控制、内模控制和自适应控制、内模控制和最优控制、预测控制的结合使内模控制不断得到改进并广泛应用于工程实践中,取得了良好的效果。
内模控制结构:——实际对象;——对象模型; ——给定值; ——系统输出;——在控制对象输出上叠加的扰动。
内模控制器的设计思路是从理想控制器出发,然后考虑了某些实际存在的约束,再回到实际控制器的。
讨论两种不同输入情况下,系统的输出情况:(1)当假若模型准确,即G (s )■G (s )Pp由图可见D (s )■D (s )G p (s )Gp(')R(s ) Y (s )D (s )Y (s )■D (s )[1■G (s )G (s )]■D (s )[1■G (s )G (s )]IMC p IMC p1假若“模型可倒”,即 则令G (s )■」-IMCG (s ) p 可得Y (s )■0777可以实现p s不管D (s )如何变化,对Y (s )的影响为零。
表明控制器是克服外界扰动的理想控制器。
(2)当D(s)■0,R(s)■0假时:模型准确,即G(s)■G(s)Pp又因为D(s)■0,则D(s)■0 表明控制器是R(s)化的理想控制器。
跟踪Y(s)变一一1一Y(s)■G(s)G(s)R(s)■G(s)R(s)■R(s)IMC p G(s)pp当模型没有误差Y(s)■G(s)G(s)R(s)■[1■G(s)G(s)]D(s)IMC p IMC p其反馈信号D(s)■[G(s)■G(s)]U(s)■D(s)■0pp内模控制系统具有开环结构。
纯滞后环节高阶系统的内模控制及仿真
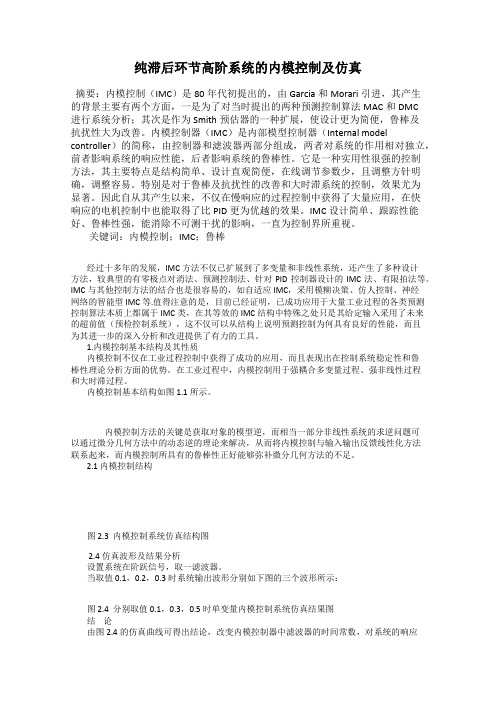
纯滞后环节高阶系统的内模控制及仿真摘要:内模控制(IMC)是80年代初提出的,由Garcia和Morari引进,其产生的背景主要有两个方面,一是为了对当时提出的两种预测控制算法MAC和DMC进行系统分析;其次是作为Smith预估器的一种扩展,使设计更为简便,鲁棒及抗扰性大为改善。
内模控制器(IMC)是内部模型控制器(Internal model controller)的简称,由控制器和滤波器两部分组成,两者对系统的作用相对独立,前者影响系统的响应性能,后者影响系统的鲁棒性。
它是一种实用性很强的控制方法,其主要特点是结构简单、设计直观简便,在线调节参数少,且调整方针明确,调整容易。
特别是对于鲁棒及抗扰性的改善和大时滞系统的控制,效果尤为显著。
因此自从其产生以来,不仅在慢响应的过程控制中获得了大量应用,在快响应的电机控制中也能取得了比PID更为优越的效果。
IMC设计简单、跟踪性能好、鲁棒性强,能消除不可测干扰的影响,一直为控制界所重视。
关键词:内模控制;IMC;鲁棒经过十多年的发展,IMC方法不仅已扩展到了多变量和非线性系统,还产生了多种设计方法,较典型的有零极点对消法、预测控制法、针对PID控制器设计的IMC法、有限拍法等。
IMC与其他控制方法的结合也是很容易的,如自适应IMC,采用模糊决策、仿人控制、神经网络的智能型IMC等.值得注意的是,目前已经证明,已成功应用于大量工业过程的各类预测控制算法本质上都属于IMC类,在其等效的IMC结构中特殊之处只是其给定输入采用了未来的超前值(预检控制系统),这不仅可以从结构上说明预测控制为何具有良好的性能,而且为其进一步的深入分析和改进提供了有力的工具。
1.内模控制基本结构及其性质内模控制不仅在工业过程控制中获得了成功的应用,而且表现出在控制系统稳定性和鲁棒性理论分析方面的优势。
在工业过程中,内模控制用于强耦合多变量过程、强非线性过程和大时滞过程。
内模控制基本结构如图1.1所示。
含有纯滞后系统的控制方法

P D控 制 是 迄 今 为 止 最 通 用 的控 制 方 法 , I 大
多数反 馈 回 路 都 采 用 P D 或 其 改 进 型 来 控 制 。 I 其控 制规 律 为
) = ) +
能 为力 。 22 S t . mi h预估 控 制
+
]
() 1
在工 业过 程 闭环 控 制 系 统 控 制 回路 中 , 存 若 在纯 滞后 , 即如 在控 制 对象 调 节通 道 、 量元 件 也 测 及执 行 机构 等 环 节 存 在 纯 滞 后 时, 环 特 征 方 程 闭 中就存 在纯滞 后 , 且存 在纯 滞 后 的环 节较 多 时 , 而
得被 调量 不 能 及 时 反 映 控 制 信 号 的动 作 , 制 信 控
号 的作 用 只有 在 延迟 r以后 才 能 反 映 到 被 调 量 ;
路是, 预先 估计 出过 程 在基 本 扰 动 下 的 动 态特 性 , 然后 由预估器 进行 补偿控 制 , 图使 被 延迟 了 的 r 力 的被调量提 前 反 映到 调 节 器 , 调 节 器提 前 动 作 , 使
从 而 明显 地减 小超调 量和加 速调节 过程 。S t mi h控
另一 方 面 , 当对 象 受到 干扰 而 引起 被 调量 改 变 时 , 控制 器 产生 的 控制 作 用不 能 即时 对干 扰 产 生抑 制 作用 。 因此 , 有 纯 滞 后 环 节 的 闭 环 控 制 系 统 必 含
对 象 也 因此 而 成 为 难 控 的对 象 。 而 且 , 滞 后 占 纯 整 个 动态 过 程 的 时 间越 长 , 控 的程 度 越 大 。 因 难 此 , 滞 后 系统 的控 制一 直受 到 许 多学 者 的关 注 , 纯 成 为重 要 的研 究课题 之 一 。本文 针 对 时滞 的控 制 问题 , 着重 选 取常 用 的几 种控 制 方法 , 虑 模型 失 考
基于ITAE的时滞过程内模PID滤波器参数优化
2 0 1 5年 l O月
电
力
科
学
与
工
程
Vo 1 .3 1. No . 1 0 0c t . . 2 01 5
El e c t r i c Po we r Sc i e nc e and Eng i ne e r i ng
基于 I T A E 的 时滞 过 程 内 模 P I D 滤 波 器 参数 优 化
( 1 ) 将 模 型 分 解 为 :最 小 相 位 部 分 : G一( S )
: 一 ( T — _— ,非 最 小¨ 相 位 :G+( ) s+ 1 ) ( 1_ 十— . r s / 2 )’. 1 卜 取 r 口 业部 日 分 J:
一
间 参 数 等 于 过 程 模 型 等 效 滞 后 时 间 。 随 着 群 体
通 滤 波 器 的 阶 数 为 l, 即 , ( s )=
, 令 低
, 则 模 型
关 系 ,与 P I D直 接 整 定 相 比 , 内模 P I D 仅 需 整 定
一
个 参 数 ,大 大 减 少 了 参 数 整 定 的 工 作 量 。 然 而
可 近 似 为 : G ( ) i = 警
意义。
关键 词 :时 滞过 程 ;I T A E ;I MC — P I D;黄 金 分 割 法
中 图分 类 号 :T M2 7 3 文 献 标 识 码 :A D 0I :1 0 . 3 9 6 9 / j . i s s n . 1 6 7 2—0 7 9 2 . 2 0 1 5 . 1 0 . 0 0 8
冯 新 强 ,韦根 原
( 华 北 电力 大 学 控 制 与 计 算 机 工 程 学 院 ,河 北 保 定 0 7 1 0 0 3 )
基于Taylor和Pade能逼近的滞后系统IMC-PID研究
全通逼近 , 设计 出基于内模原理的 P I D反馈控制嚣, 对其参数整定进行分析, 并进行仿真实验 , 评
价 了各种 PD控制器的适用情况. I
关键词 :内模控制 ; ae Pd 逼近; 鲁棒性能 ; I PD控制器
中图分 类号 :P7 . 文 献标识 码 : 文章编 号 :07—85 20 )2— 0 6—0 T 2 16 A 10 5X(0 6 0 0 7 6
Ta l r a d P d M C .PI yo n a e I . D
Yl in bn. HOU Y u x n N Xa , i Z o —u
( o eeo uo ai c neadE g er g SuhC iaU i ri f eh o g un zo , unzo 160,hn ) C l g f tm t nSi c n ni e n , ot hn n esyo cn l yG a ghu G aghu5 0 4 C ia l A o e n i v t T o
结构和设计简便 , 调节参数少且调整方 向明确 , 所以 , C有望成为与 PD互为补充 , I M I 大量应用于工程实际 的一种行之有效的控制手段 . J
R v r J M r i ie a o r和 a
,
Zfi 【等 , aru6 针对时滞 的过程模 型, io 使用了一阶 Pd 逼近, ae 使用二步 I C控制器 M
逼近来设计基于内模原理的 PD控制器 , I 并对四类不 同的 PD实现进行了比较, 了控制器参数整定的 I 分析 影响因素. 在模型匹配和模型失配两种情况下 , 对一阶加纯滞后闭环反馈系统进行 了仿真实验 , 得出了四
s e f ey t ein P D fe b c o t l r ae n itr a d lp n il.T emo if ain o o t H r p c v l o d s I e d a k c nr l sb s do ne lmo e r cpe h df c t fc nr e i g oe n i i i o o s
基于Matlab的纯滞后控制系统设计
实验三 基于Matlab 的纯滞后控制系统设计一、实验目的1) 学习使用simulink 进行Smith 预估补偿控制的设计方法。
2) 学习使用simulink 实现Dahlin 算法的设计方法。
二、实验原理1. Smith 预估补偿控制的设计 已知被控对象传递函数:3023()2s +60s+1s G s e -=(1) 应用Smith 预估补偿算法设计控制系统,并采用PID 控制。
原理图参见课本P127图4-21和P128图4-22。
表1衰减曲线法整定控制器参数经验公式2. Dahlin 算法的设计 已知被控对象传递函数:102()100s+1s G s e -=(2)采样周期为2s ,选择期望闭环传递函数中的时间常数分别为T τ=5s ,10s ,20s ,设计Dahlin 控制器。
原理图参见课本P129 4.3.2小节。
三、实验内容1) 按式(1)建立系统的Simulink 模型,应用Smith 预估补偿算法设计控制系统,消除滞后时间的影响,并整定好PID参数。
与同一PID控制器对无滞后的被控对象控制结果相比较,记录实验曲线。
据Smith预估补偿算法建立滞后系统的Simulink模型原理图:图1 系统的Simulink模型仿真图图2 控制系统整定好PID参数的曲线图b)与同一PID控制器对无滞后的被控对象控制结果相比较图3 同一PID控制器对无滞后的被控对象控制Simulink仿真图图4 同一PID控制器对无滞后系统的仿真曲线图2)与同一被控对象不带Smith预估补偿器的PID控制系统相比较,观察仿真结果,记录实验曲线。
不带Smith预估补偿器的PID控制系统Simulink仿真图如下仿真图如下:图5 不带Smith预估补偿器的PID控制系统曲线图当加入离散控制器和零阶保持器时,观察和比较实验图。
图6 有离散控制器和零阶保持器的Simulink仿真图图7 离散控制器和零阶保持器的仿真曲线图3)按式(2)建立系统的Simulink模型,设计Dahlin控制器。
纯滞后系统控制器分析与设计

I
哈尔滨商业大学德强商务学院毕业论文(设计)
Pure delay system controller analysis and design
Abstract In industrial production, was charged with targeting not only volume of deferred, often with different degrees of pure delay. For example, the gas material, liquid material is usually transmitted through the pipeline, solid material is often transmitted through the conveyor. When the use changes such as regulating the flow of materials, production process, through the transmission link transmission time (delay), the material changes to reach the production equipment and thus achieve the process parameters change. The transport process transfer time is a pure time lag. Again, in the heat exchange process, the often heated material temperature as the output volume to be controlled, while the heat-carrying medium (such as superheated steam) flow as a control volume containing the heat medium flow rate after the change, after a certain period of time before the performance of for the output material temperature changes. This performance of the system contains a pure delay delivery available characterization. In the process control, was charged with a lag characteristics of the object is a common phenomenon, generally not significant lag, in order to simplify the control system and ignore the impact of lag. When the hysteresis significantly affect the system as well as quality control, then the response lag characteristics of targeted control. the analysis of the system with time delay is designed to specific analysis of the conventional fuzzy controller. Using the pure inertial link behind the computer simulation. Keywords: controlled object; Pure time delay; adaptive
基于内模控制的PID_参数整定方法研究及应用
望的闭环响应设计要求指定一个时间常数 τ c ꎬ
程( τ2 > θ) 得到ꎬ使用微分时间是为了抵消较大
可设计闭环响应为一阶时滞加纯滞后模型.
的二阶过程时间常数.
1
æç y ö÷
=
e - θs .
(11)
è y s ø 期望 τ c s + 1
把式(11) 和式(1) 带入式(10) 中ꎬ得到
理想情况下 闭 环 时 间 常 数 τ c 可 以 自 由 选
基于内模控制的 PID 参数整定方法研究及应用
王 港ꎬ 李 凌
( 沈阳化工大学 信息工程学院ꎬ 辽宁 沈阳 110142)
摘 要: 工业生产过程中难以建立精确的数学模型ꎬ其参数往往难以整定. 基于此ꎬ本文研究了
基于内模控制的参数整定方法ꎬ利用减半原则将高阶含有延迟环节的模型降阶为一阶或二阶的模
1 τ1
1
1
ìï
K =
=
ꎬ
ï c k τ c + θ k′ τ c + θ
(14)
í
ïτ I = τ 1 ꎬ
ïτ = τ .
î D
2
为了改善负载干扰响应ꎬ需要减少积分时间ꎬ
( - 1ꎬ0) 临界点的最短距离ꎬ因此 M s 越小ꎬ系统
稳定裕量越大ꎬ即鲁棒性越强. 通过计算输出量
的积分绝对误差( IAE) 和输出量的总变分( TV)
由式(2) 可得逆响应时间常数( 负数分子时
间常数) ꎬ可近似为一个纯滞后过程ꎬ即
续模型ꎬh 可不计. 减半原则的主要准则是要保
(5)
式中有效的滞后时间 θ 是初始滞后时间 θ0 的
总和.
就控制系统而言ꎬ在控制器性能方面ꎬ近似
滞后的效果比同样的大滞后过程效果更差ꎬ特别
基于内模原理的PID控制器参数整定ppt课件

e G(s) 0.7 50s 290s 1
根据上式,分别按IMC法、ZN法、CC法整定PID参数如下: IMC法:取ε=40,相应有KC=4.32s,TI=302.5,TD=11.81s; ZN法:KC=9.94,TI=100s,TD=25s; CC法:KC=11.57,TI=117.2s,TD=17.88s.
简介
内模控制方法是Garcia和Morari于1982年首先正式提出,以其简 单、跟踪调节性能好、鲁棒性强、能消除不可测干扰等优点,为控 制理论界和工程界所重视。1989年Morari透彻研究了内模控制的鲁 棒性和稳定性,并且由其他学者推广到非线性系统,蓬勃发展中的 神经网络也引入到内模控制中。内模控制还和许多其它控制方式相 结合,如内模控制与模糊控制、内模控制和自适应控制、内模控制 和最优控制、预测控制的结合使内模控制不断得到改进并广泛应用 于工程实践中,取得了良好的效果。
Tps 1
(12)
就以上过程模型做两点说明:(1)对于最小相位系统,只需令 a=0即可;(2)对于像电站粉锅炉主蒸汽温度系统之类的多容高阶大 惯性环节,可以等效为上式,不过a=0,而且这种等效造成的误差可 以达到相当满意的程度。
根据内模控制器设计步骤,对Gm(s)作如(7)、(8)形式分解,
得到:
e Gm (s) (1 as) ps ,Gm (s) Kp Tps 1
知,采用 1 形式的一阶低通滤波器即可。至此可以给出对一大
s 1
类系统的内模PID整定步骤:
(1)对被控对象模型进行低阶等效,得到(12)式的形式; (2)按(13)式进行模型分解; (3)根据(14)式求出(13)式在s=0处的各阶导数值; (4)取r=1,选取滤波器时间常数ε,据(17)式求D(S)在s=0处 的各阶导数值; (5)据(18)式求f(s)在s=0处的各阶导数值; (6)据(15)式求取PID控制器参数; (7)仿真验证或现场观察控制效果,若满意,则结束;若不满 意,则返回(4)重新选择ε。
基于内模控制的PID控制器参数整定
基于内模控制的PID控制器参数整定1绪论1.1设计目的在工业过程中,简单的PID控制可以解决约90%的控制问题,然而对于强耦合多变量过程、强非线性过程和大时滞过程,常规PID控制难以得到满意的控制效果。
PID控制器的各种优化设计方法和参数整定方法已成为解决上述过程控制问题的一种途径。
采用内模控制原理可以提高PID控制器的设计水平。
与经典PID控制相比,内模控制仅有一个整定参数,参数整定与系统动态品质和鲁棒性的关系比较明确。
1.2内模控制的简介1.2.1内模控制的主要特点内模控制的特点是被控对象与具有逆模型特性的控制器相串联,并与内模相并联。
在模型匹配时,实现系统动态特性的开环控制;当模型失配或有干扰存在时,采用在反馈通道中插入反馈滤波器的方法,通过适当地选取滤波器的结构和参数,可以有效地抑制输出振荡,并可获得所期望的动态特性和鲁棒性;而输入滤波器用于柔化控制动作,对设定值起平滑和柔化作用,以减小突加干扰对系统带来的冲击。
内模控制与传统反馈控制相比,其主要优点有:内模控制方案设计简单,比较容易获得良好的动态响应,同时能兼顾稳定性和鲁棒性,并能消除不可测干扰对系统的影响。
内模控制结构最大的优点是把伺服问题与鲁棒性及其抗干扰性问题分开处理,进而使分析、设计和调整都大为简化,同时又能像Smith 预估器那样适用于大时滞系统。
内模控制结构的关键是建立对象的正模型、逆模型,以及如何设计反馈滤波器来提高系统的稳定鲁棒性。
1.2.2内模控制的研究进展内模控制自八十年代产生以来,已有20多年的历史,在这段时间里,经过众多控制工作者的努力,内模控制不论在控制器本身的设计上,还是在与其它控制方法的结合上,或者是在向非线性、多变量系统的扩展上,都取得了长足的进步,为其广泛应用打下了坚实的基础。
尽管生产实际中约有90%的控制问题都可用简单的PID控制器来解决,但对于有较大纯滞后、明显非线性、多变量耦合的系统,采用内模控制是非常适合的。
大纯滞后系统的一种PID预估控制方法
4=1200 秒 ( 仿真结果如图 6 所示 (
PID
预 估 控 制 方 法
图 5 的仿真结果验证了超前预估控制方法的正 确
88
武 汉 职 业 技 术 学 院 学 报 二
性 ’被控对象 G1(s)!)#!的动态响应品质可以做得很好 ( 图
6 是 在 被 控 对 象 G1 (s)!)#!的 模 型 参 数 和 结 构 发 生 变 化 后 ’ 而 PID 调节器控制参数和 G2(s)均不变 的 情 况 下 的
武 汉 职 业 技 术 学 院 学 报 二
Smith 预 估 控 制 系 统 等 效 框 图 # 为 了 说 明 问 题 # 本 文 仍 作简要论述 ’ 设被控对象为 G1(s)!"#!# 其中 G1(s)为被控 对象不包含纯滞后特性的模型 #!"#!为纯滞后环节 # 在一 般的控制系统中 G1(s)和 !"#!是难以分开的 ’
仿真结果 ’表明超前预估控制方法具有较好的鲁棒性 ( 设图 4 控制系统的闭环传递函数为 G(s)’ 则由图 4 不难得出 % 2& 式 )
四 + 对有扰动的大纯滞后系统的控制
实际系统往往都有扰动存在 ’ 扰动量的获知一 般 有两种情况 ’ 一是扰动量可在传递到被控对象前获知 , 另一是扰动量必须要从系统输出中预估获知 ( 对前者 是较易控制的 ’ 而对后者是不易控制的 ’ 本文将对这两 种情况做如下的研究与分析 (
二 ) 预估控制方法
本文提出如图 3 所示的超前预估控制方法 # 其与 图 2 等 效 超 前 预 估 控 制 系 统 不 同 之 处 在 于 G2(s)接 在 PID(s)之后 #在扰动 D(s)之前 #核心思想就是产生一个能 对 G1(s)有 良 好 控 制 品 质 的 控 制 量 U(s)# 使 其 直 接 作 用 于 G1(s)!"#!# 而 U(s)的 变 化 不 受 ! "#!的 影 响 # 所 以 在 不 考 虑 扰 动 D(s)的 情 况 下 # 无 须 对 纯 滞 后 时 间 # 做 出 预 估 ’ 虽 然 U(s)在 控 制 开 始 时 就 作 用 于 G1(s)! "#!# 但 PID 调 节 器 已 根 据 G2(s)在 被 控 制 过 程 中 的 输 出 Y2(s)对 U (s)进行了不断的修正 # 使 !"#!对时滞系统稳定性 不 产 生 影响 ’ 事实上 # 若不考虑 D(s)时 # 图 1 是补偿器 &!(s)具 体
一阶加纯滞后对象的PID控制器参数整定方法的比较研究

一阶加纯滞后对象的PID控制器参数整定方法的比较研究【摘要】在工业控制领域,以一阶加纯滞后控制过程为研究对象,分别采用Z-N法、粒子群、模糊控制对PID控制器的参数进行整定,并且从稳定性、跟踪性、以及抗干扰性等方面通过MATLAB仿真,分析比较各自的优缺点。
研究结果表明粒子群算法以及模糊控制法对于PID参数的整定在综合性能方面有一定的优势,并对现代工业控制的PID整定设计方面有一定实用价值。
【关键词】参数整定;Z-N;粒子群算法;模糊PID;MATLAB仿真Abstract:In the field of industrial control,to a first order plus dead time control process for the study,were used Z-N method,PSO,fuzzy control parameters were tuning PID controllers,and from stability,tracking,as well as other aspects of immunity by MATLAB simulation,analysis and comparison of their advantages and disadvantages.The results show that particle swarm optimization and fuzzy PID control method for the whole parameter set in terms of overall performance has certain advantages and tuning PID control of modern industrial design has some practical value.Keywords:Parameter tuning;Z-N;Particle Swarm Optimization;Fuzzy PID control;MATLAB simulation引言PID控制器是目前在工业控制中应用最广泛的控制策略之一[1]。
改进的增益预估自适应内模控制算法研究
改进的增益预估自适应内模控制算法研究
曾毅;宫亮;杨煜普
【期刊名称】《微计算机信息》
【年(卷),期】2009(0)16
【摘要】传统内模控制系统动态性能的提高往往是以牺牲鲁棒性为代价,为避免这一缺点,本文提出了一种改进的增益预估自适应内模控制算法.该算法基于等加速度模型,根据对象增益的历史变化趋势预估增益的大小,并在线调整对象模型和控制器的参数,从而降低模型与对象的失配程度,起到提高控制系统鲁棒性的作用.将该算法应用于一个大时滞温控系统,取得了良好的控制效果.
【总页数】3页(P1-2,7)
【作者】曾毅;宫亮;杨煜普
【作者单位】200240,上海,上海交通大学自动化系;200240,上海,上海交通大学自动化系;200240,上海,上海交通大学自动化系
【正文语种】中文
【中图分类】TP273
【相关文献】
1.时滞系统增益自适应内模PID控制 [J], 王建国;张井岗;赵志诚
2.基于Taylor展开的纯滞后系统增益自适应内模PID控制 [J], 刘开培;郑世喜;陈华
3.采用Adaline神经网络实现增益自适应内模控制 [J], 刘红军;赵鑫;薛浩洋
4.大时滞过程的增益自适应内模控制算法的研究与实现 [J], 李华;胡元春
5.增益自适应内模控制器及其在纸机控制中的应用 [J], 贾磊;孙优贤
因版权原因,仅展示原文概要,查看原文内容请购买。
系统内模控制器设计及仿真

内模控制[1 ]是一种重要的控制结构 ,它是在传统 反馈控制基础上 ,经过变换产生的. 很多实际控制系 统 ,其被控对象的数学模型可以近视为带纯滞后的一 阶或二阶环节 ,当纯滞后环节用 Taylor 级数展开时 , 内膜控制可转化成常规的单位反馈控制 ,使内膜控制 器的设计更简单实用. 内模控制器用于此类系统比传 统反馈控制亦能获得良好的动态及稳态性能. 本文用 这种方法来设计内膜控制器并将其与传统的比例2微 分2积分控制 ( PID 控制 ,用 Ziegler2Nichols 整定参数) 的控制结果进行比较 ,并用 Matlab 软件进行仿真.
=
T
S
K +
1e
-
τs
(3)
将纯滞后环节用一阶 Taylor 级数展开后 ,取被控
对象的内模[2 ] :
^G ( S )
=
K (1 - τS ) TS + 1
(4)
则实现完全控制的内膜控制器为 :
Gc ( S )
=
1 ^G ( S )
Gf ( S )
(5)
其中 , Gf ( S ) 是为了使控制功能稳定和物理上可实现
(2)
由公式 (2) 可见 , 对于准确的预测模型 , 系统的反
馈信号就是扰动 D ( S ) . 当对象与模型之间存在误差
时 , B ( S ) 中将包含某些偏差的信息 , 只要适当地改进
B ( S ) ,就可以获得较好的鲁棒性.
1. 2 控制器设计
设被控对象的传递函数为 :
基于Taylor逼近的非线性系统PID型多步预测控制
基于Taylor逼近的非线性系统PID型多步预测控制
张燕;陈增强;袁著祉
【期刊名称】《控制与决策》
【年(卷),期】2004(19)4
【摘要】基于局部递归神经网络对非线性系统进行递归多步向前预测,将系统实际多步向前预测值按泰勒公式在其递归预测值上展开,实现对非线性系统多步预测输出值的二次逼近,减少了预测误差.进而通过对PID型多步预测性能指标函数极小化求取控制量.控制器与广义预测控制器结构相似,其参数通过神经网络在线辨识获得.仿真实验表明了该方法的有效性.
【总页数】4页(P448-451)
【关键词】非线性系统;人工神经网络;反馈线性化理论;PID型多步预测控制;Taylor 逼近
【作者】张燕;陈增强;袁著祉
【作者单位】南开大学自动化系
【正文语种】中文
【中图分类】O231.2;TP183
【相关文献】
1.基于支持向量机的非线性系统多步预测控制 [J], 刘生峰
2.基于变论域模糊控制的Taylor逼近型内模PID算法 [J], 张皓;高瑜翔;曹远杰;马腾;黄天赐
3.基于Taylor和Pade能逼近的滞后系统IMC-PID研究 [J], 尹先斌;周有训
4.基于动态非线性逼近的非线性系统预测控制 [J], 沈永良;胡致强;赵建华
5.大滞后非线性系统PID型多步预测控制 [J], 孙慧;张燕
因版权原因,仅展示原文概要,查看原文内容请购买。
根据内模基本知识的PID控制控制控制控制器参数整定仿真实验

基于内模原理的PID控制器参数整定仿真实验1.内模控制内模控制器(IMC)是内部模型控制器(Internal model controller)的简称,由控制器和滤波器两部分组成,两者对系统的作用相对独立,前者影响系统的响应性能,后者影响系统的鲁棒性。
它是一种实用性很强的控制方法,其主要特点是结构简单、设计直观简便,在线调节参数少,且调整方针明确,调整容易。
特别是对于鲁棒及抗扰性的改善和大时滞系统的控制,效果尤为显著。
因此自从其产生以来,不仅在慢响应的过程控制中获得了大量应用,在快响应的电机控制中也能取得了比PID更为优越的效果。
IMC设计简单、跟踪性能好、鲁棒性强,能消除不可测干扰的影响,一直为控制界所重视内模控制( Internal Model Control IMC ) 是一种基于过程数学模型进行控制器设计的新型控制策略。
其设计简单、控制性能良好,易于在线分析。
它不仅是一种实用的先进控制算法,而且是研究预测控制等基于模型的控制策略的重要理论基础,也是提高常规控制系统设计水平的有力工具。
值得注意的是,目前已经证明,已成功应用于大量工业过程的各类预测控制算法本质上都属于IMC类,在其等效的IMC结构中特殊之处只是其给定输入采用了未来的超前值(预检控制系统),这不仅可以从结构上说明预测控制为何具有良好的性能,而且为其进一步的深入分析和改进提供了有力的工具。
内模控制的结构框图如图1:图1-1 内模控制的结构图其中,IMC G —内模控制器;p G —实际被控过程对象;m G —被控过程的数学模型; d G —扰动通道传递函数。
(1)当0)(,0)(≠=s G s R d 时,假若模型准确,即)()(s G s G m p =,由图可知,)]()(1)[()]()(1)[()(IMC IMC s G s G s G s G s G s G s Y m d d -=-=p ,假若“模型可倒”,即)(1s G m 可以实现,则可令)(1)(IMC s G s G m =,可得0)(=s Y ,不管)(s G d 如何变化,对)(s Y 的影响为零。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2 二 阶纯 滞 后 对 象 的 内模 PD控 制 I 设 被控 对 象 为
G (
囤 2 内模 控 制 系统 等垃 模 型
瓦 再 丽
~
(、 8
将 纯 滞 后 环 节 用 一 阶 y r 近后 被 控 对 象 的 内 部 b 逼
4 ・ 能控 制 技 术 一 智
《 气 自动 4 } 0 2年 第 l期 电 t 20
传 递 函数 为
C( 1 5 G ) ( 1一 G ) ) ( G(
=
图 1 内摸 控 制 原 理
( 1+
j
_ 1
一
() 7
从 式 ( ) 以 看 出 , G ) 用 二 阶 滤 波 器 时 , 位 7可 当 ( 采 单
反 馈控 制 器 可 以用 一个 带 滤 波 器 的 P 控 制 器 来 实 现 . I 实 际 的控 制 器 都 带 有 惯 性 环 节 , 而工 程 实 现 非 常 容 园
维普资讯
基 于 Ta lr 开 的 纯 滞 后 yo 展 系 统 增 益 自适 应 内模 P D 控 制 I
武 汉 大 学 (3 0 2 刘 开 培 40 7 ) 郑世 喜 陈 华
【 要 】 幸文 将 纯 滞后 环节 进行 一 阶 T y r 摘 a l 逼近 后 , 据 内模 控 制 原 理 . 到 了单 位 反馈 P D控 制器 的 参 数 整 o 根 得 I 定 值 , 后 运 用仿 ^智 能 的方 法 得到 被控 对象 的静 态增 益 , 然 由此 来 自动 调 整控 制 器 的 比例 系数 。仿 真 结 果 袁 明 , 盘 增 自适 应 内摸 pD 控 制 器能 克服 增 益 变化 对控 制性 能 的影 响 . 1 显著 改 善控 制 品质
维普资讯
模 型 为
器 必须 得 到被 控 对 象输 入 输 出 中 的直 流分 量 。可 以采
)= () 9
用低 通 滤 波器 法 求 出 输 入 输 出 中 的 直 流 分 量 , 后 求 然 出 系统 增 益 , 图 4所 示 : 如
㈩
当采 用 二 阶滤 波 器 时 , 得
㈤ = G ㈤ = () 5
二 、 滞 后 系统 I - I 控 制 原 理 纯 MC P D
内模 控制 原 理 如 图 1所 示 , 单 位 反 馈 等 效 模 型 其
如 图 2所 示 。
当 采用 一阶 滤 波器 时 , 根据 式 ( ) 单 位 反 馈 控 制器 的 4得
传递 函 数为
l一 阶纯滞 后 对 象 的 内模 P D控 制 I
设 被 控对 象 为
c F ㈤=
= ( 击】 ) 而 1 ( + 6
可 以看 出 , G, 采 用 一 阶 惯 性 环 节 时 位 反 馈 控 当 ( ) 单 制 器可 以用一 个 理 想 的 PI 制 器来 实 现 。 控 当采 用 二 阶滤 波 器 时 , 据 式 ( ) 单 位 反馈 控 制 器 的 根 5得
)=F
( +
而了 T T I2
2ห้องสมุดไป่ตู้
波. 滤波 器的 输 出分 别 为 Ou p t 和 Oup t . 二 t uU1 t uY1 第
1 _1 —
¨ )
级 为 1 均值 滤 波 , 渡 器 的 输 出分 别 为 Oup t 6 滤 t uu2
和 Ou p t : tu Y2
当采用 二 阶滤 渡器 时 , 得
)= G - / G
相 应的 的单 位 反 馈控 制器 的传递 函数 为
… )
1 “ 稳 态值 和j的智能化测量 、、
设 “、 v分别 经过 两 级 滤 波 , 级 滤 波 的 目的 是 为 两 了判 断 系统 是 否 进 入 稳 态 , 即两 级 滤 渡 的 结 果 如 果 接 近 相等 , 认 为 系 统 进 入 稳 态 :第 一 级 为 8点 均 值 滤 则
得 内模控 制 器
G ( )= G: G ( ) s s ( 0 1)
由 于低通 滤 渡 器 的输 出 中必 然 含 有 其 它 高 频 成 分 的分量 , 而得 到 的静 态 增 益 K 是 波 动 的 ( 因 假设 实 际
系统 中是恒 定 的 ) 不利 于 系 统 性 能 的改 善 。下 面 我 们 , 来 讨论 一下 获 得 系 统静 态 增 益 的智 能 化方 法 。
【 键词 】 T y r 近 关 al 逼 o
一
纯滞后
内模 控 制
PD 仿 人智 能 I
增 益 自适应
G( ) c) 1
引
言
纯滞 后 系统 内模 控 制 具 有 一 定 的普 棒 性 , 是 当 但
被控 对 象 特性 发 生 变 化 , 别 是 当 系 统 增 益 发 生 变化 特
将 纯 滞 后 环 节 用 一 阶 T y r 近后 , 控 对 象 的 内部 al 逼 o 被
模 型 为
对, 系统 特性 会 变 坏 , 至 会 出 现 不 稳 定 。文 [ ] 出 甚 4给
了参 数整 定 的边 界 条 件 。采 用 常 规 的 增 益 自适 应 内模
)= 得 内模 控 制 器 G ( )= G Gr ( ) 当采 用 一 阶滤 波 器 时 , 得 ( )= G ( )=
㈦
控 制 时 _ , 统 的结 构 不利 于工 程 应 用 , 3系 , 当增 益 发 生 变
化时 , 其参 数 修改 算 法 . 无 扰 动切 换 方 法 较 复 杂 。下 即 面我 们 首先 将 纯滞 后 环节 运用 T yo 展 开 方法 进 行 逼 a lr
f) 3
近 , 内模 控 制 系 统 转 化 成 为 常 规 的 P D单 位 反 馈 控 将 1 制 系统 , 然后 讨 论 通 过 自适 应 机 构 获 取 系 统 的 静 态 增 益 , 现 增 益 自适 应 P D控 制 。最 后 给 出了仿 真 结果 。 实 I