谷物联合收获机往复式切割器切割过程的研究_基于切割图分析_陈振玉
窄节距低割茬往复式切割器的研究
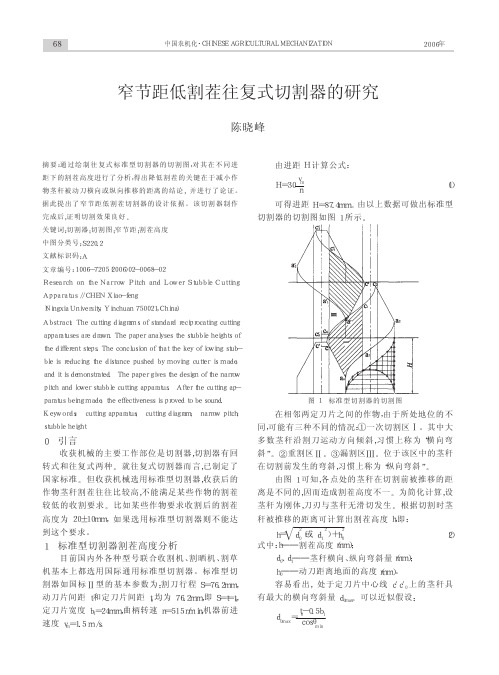
2006年窄节距低割茬往复式切割器的研究陈晓峰中国农机化·CHINESEAGRICULTURALMECHANIZATION摘要:通过绘制往复式标准型切割器的切割图,对其在不同进距下的割茬高度进行了分析,得出降低割茬的关键在于减小作物茎秆被动刀横向或纵向推移的距离的结论,并进行了论证。
据此提出了窄节距低割茬切割器的设计依据。
该切割器制作完成后,证明切割效果良好。
关键词:切割器;切割图;窄节距;割茬高度中图分类号:S220.2文献标识码:A文章编号:1006-7205(2006)02-0068-02ResearchontheNarrowPitchandLowerStubbleCuttingApparatus//CHENXiao-feng(NingxiaUniversity,Yinchuan750021,China)Abstract:Thecuttingdiagramsofstandardreciprocatingcuttingapparatusesaredrawn.Thepaperanalysesthestubbleheightsofthedifferentsteps.Theconclusionofthatthekeyoflowingstub-bleisreducingthedistancepushedbymovingcutterismade,anditisdemonstrated.Thepapergivesthedesignofthenarrowpitchandlowerstubblecuttingapparatus.Afterthecuttingap-paratusbeingmade,theeffectivenessisprovedtobesound.Keywords:cuttingapparatus;cuttingdiagram;narrowpitch;stubbleheight0引言收获机械的主要工作部位是切割器,切割器有回转式和往复式两种。
玉米联合收获机典型切碎部件的研究
St d n t pc l h p i g p r fc r ombn a v s e u y o y ia o p n a t o o n c c s ie h r e t r
XI iL in fiNI n p n AO j, I a -e , U Yu — e g J
.
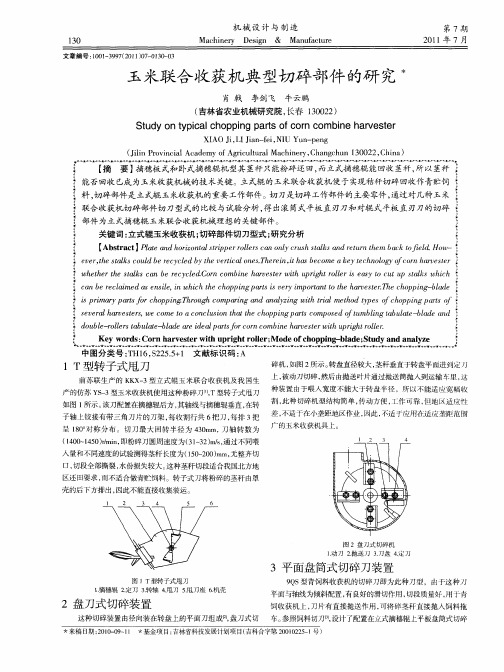
平板 直刃刀和 对辊式 平板 直刃 刀的切 碎
{ ; {
,
h t k n tr e aktfe o - a s dr un h m b c i l H w sl a e t o d s eo e e c nl yo onh ret cm k y eh o g r avs r: b 0 t o fC e
片 ,切刀平面与轴线倾角为 = 0 5 ,刀刃 口为椭 圆曲线。切 刀长 2 0 m, 0 r 切刀经试验 , a 切段质量较好。但切段不能抛出抛送筒 , 而
摘穗辊在最佳工 转数 n 10  ̄ i, <0 0 nn茎秆线速度 F . I 切 =7 37 回带到机壳 内, 更严重的是形成一股强大的回吹气流将 碎茎秆喷 刀转数 n 18 o i 切刀线速度 V - 1 5 /取刀宽 9 m 刀长 j 85t n = n - . ms 44 0 m, 向摘穗辊 , 直接影响摘穗辊下常工作 。 20 0 mm, 刀厚 6 m, m 弧半径 R 14 m, 口角 a 4 0 刀片曲面分 =4m 刃 =0,
机 械 设 计 与 制 造
10 3
Ma hi e y De i n c n r sg
&
Ma fc u e nu a t r
第 7期 2 1 年 7月 0 1
文章编号 :0 1 3 9 (0 )7 0 — 3 10 — 9 7 2 1 0 — 10 0 1 3
双动刀往复式切割器[实用新型专利]
![双动刀往复式切割器[实用新型专利]](https://img.taocdn.com/s3/m/8fd1f1efe87101f69f319579.png)
专利名称:双动刀往复式切割器
专利类型:实用新型专利
发明人:龚永坚,王益志,楼妙良,徐樟其,陈德俊申请号:CN200520134241.1
申请日:20051226
公开号:CN2879629Y
公开日:
20070321
专利内容由知识产权出版社提供
摘要:本实用新型属于农业机械技术领域,特别是一种用于全喂入稻麦联合收割机上的双动刀往复式切割器。
本实用新型针对在全喂入联合收割机上安装现有的双动刀往复式切割器存在着作物导禾、切割作物横向支承、双动刀往复式切割器与收割台之间联接的难题,提供一种切割作物茎杆时,采用拨禾轮做纵向支承的全喂入联合收割机上使用的双动刀往复式切割器。
本实用新型包括切割器梁、压刃器、磨擦片、上动刀片、上动刀杆、下动刀片、下动刀杆、导禾器、下动刀杆限位条、上动刀滑道、上动刀驱动头、下动刀驱动头、下动刀滑道、双动刀驱动装置、导禾器安装梁、压刃器垫。
其中,切割器梁与收割台机架联接在一起,上动刀杆和下动刀杆安装在切割器梁上。
申请人:金华职业技术学院
地址:321007 浙江省金华市婺城区婺州街1188号
国籍:CN
代理机构:金华科源专利事务所有限公司
代理人:胡杰平
更多信息请下载全文后查看。
谷子收割机[实用新型专利]
![谷子收割机[实用新型专利]](https://img.taocdn.com/s3/m/0aba6d3a80eb6294dc886c94.png)
专利名称:谷子收割机
专利类型:实用新型专利
发明人:欣玉成,陈正永,韩永梅,寺坂贤一申请号:CN201820338476.X
申请日:20180313
公开号:CN208113355U
公开日:
20181120
专利内容由知识产权出版社提供
摘要:本实用新型公开了谷子收割机,包括割台、设置在割台下游的脱谷装置、及设置在脱谷装置下游的清选装置,割台包括割台本体和切割器,割台本体的左右两侧分别铰接有向前延伸的拨禾轮支臂,拨禾轮支臂上转动设置有拨禾轮,拨禾轮包括左右对称设置的两个固定轮盘、设置在两个固定轮盘之间的拨禾轮转轴和多个拨禾杆、及设置在拨禾杆上的多个拨禾爪,固定轮盘周向上设有至少一个防挂穗拨杆,防挂穗拨杆一端固定在固定轮盘上且另一端向固定轮盘径向外侧延伸。
本实用新型提供的谷子收割机,可提高收割效率。
申请人:久保田农业机械(苏州)有限公司
地址:215026 江苏省苏州市工业园区苏虹东路77号
国籍:CN
代理机构:苏州创元专利商标事务所有限公司
代理人:范晴
更多信息请下载全文后查看。
一种大行距作物多行收获用降振减阻往复式切割器[发明专利]
![一种大行距作物多行收获用降振减阻往复式切割器[发明专利]](https://img.taocdn.com/s3/m/9184e130c1c708a1294a44cc.png)
专利名称:一种大行距作物多行收获用降振减阻往复式切割器专利类型:发明专利
发明人:宋占华,陈浩然,闫银发,李法德,张晓辉,李玉道,郭庆辉,王敬,谢雪文
申请号:CN201710400013.1
申请日:20170531
公开号:CN107087470A
公开日:
20170825
专利内容由知识产权出版社提供
摘要:本发明涉及一种大行距作物多行收获用降振减阻往复式切割,包括动刀、定刀、定刀杆、动刀杆、定刀杆梁和压刃器;定刀杆上间隔均匀设有多组定刀;动刀杆上与每组定刀对应的位置安装有动刀组;定刀组和动刀组的组数相等,且每组定刀和每组动刀中定刀片和动刀片的个数也相等;压刃器固定在定刀杆梁上;定刀杆梁和动刀杆通过压刃器可活动卡放在一起;动刀杆能沿定刀杆梁做前后往复运动;每组定刀或每组动刀之间的间距为作物种植行间距。
本发明与现有的标准型往复式切割器相比,可减少动刀往复式运动引起的惯性力、动刀与定刀之间的摩擦力,降低切割器对割台机体产生的振动;且间距可调,能适用于不同作物行的切割收获,能同时进行多行收获切割。
申请人:山东农业大学
地址:271018 山东省泰安市岱宗大街61号
国籍:CN
更多信息请下载全文后查看。
一种谷物联合收割机破碎含杂在线检测方法与系统[发明专利]
![一种谷物联合收割机破碎含杂在线检测方法与系统[发明专利]](https://img.taocdn.com/s3/m/f55c92450029bd64793e2c73.png)
专利名称:一种谷物联合收割机破碎含杂在线检测方法与系统专利类型:发明专利
发明人:金诚谦,陈满,徐金山,倪有亮,张光跃,袁文胜,杨腾祥,刘政
申请号:CN202110252488.7
申请日:20210309
公开号:CN112673801A
公开日:
20210420
专利内容由知识产权出版社提供
摘要:本发明涉及一种谷物联合收割机破碎含杂在线检测方法及系统,通过摄像装置实时获取谷物样本图像,由数据处理模块对谷物样本图像进行实时计算分析,得到谷物联合收割机的实时破碎含杂率,实现了谷物联合收割机作业质量破碎含杂的在线检测,提高了收割机的工作效率,能够及时发现收获过程中存在的问题,提高了收获质量,有利于提高谷物联合收割机的智能化水平。
申请人:农业农村部南京农业机械化研究所
地址:210014 江苏省南京市玄武区中山门外柳营100号
国籍:CN
代理机构:北京高沃律师事务所
代理人:杨媛媛
更多信息请下载全文后查看。
玉米切割实验报告总结(3篇)

第1篇一、实验目的本次实验旨在研究玉米切割装置的性能,分析切割次数及割茬倾角对切割效果的影响,为玉米联合收获机的设计和优化提供理论依据。
二、实验原理玉米切割实验是通过模拟玉米联合收获机工作过程中的切割过程,测试切割装置在不同参数下的切割性能。
实验中,以割刀曲柄转速和装有上拨齿的拨禾链主动链轮转速为变量,分析其对切割效果的影响。
三、实验方法1. 实验材料:玉米秸秆、切割装置、测力计、计时器等。
2. 实验步骤:(1)将玉米秸秆固定在实验台上,确保秸秆与切割装置的切割线对齐。
(2)调整割刀曲柄转速和拨禾链主动链轮转速,分别为设定值。
(3)启动切割装置,记录切割次数及割茬倾角。
(4)重复步骤(2)和(3),分别记录不同转速下的切割效果。
(5)分析实验数据,得出切割性能与转速的关系。
四、实验结果与分析1. 切割次数与割茬倾角的关系实验结果表明,随着切割次数的增加,割茬倾角逐渐增大。
当切割次数达到一定值时,割茬倾角趋于稳定。
这表明,切割次数对割茬倾角有显著影响。
2. 割刀曲柄转速对切割效果的影响实验结果显示,割刀曲柄转速越高,切割次数越多,割茬倾角越大。
这说明,割刀曲柄转速对切割效果有显著影响。
在保证切割效果的前提下,应适当提高割刀曲柄转速,以提高切割效率。
3. 拨禾链主动链轮转速对切割效果的影响实验结果表明,拨禾链主动链轮转速对切割效果的影响与割刀曲柄转速类似。
提高拨禾链主动链轮转速,可增加切割次数和割茬倾角。
因此,在保证切割效果的前提下,适当提高拨禾链主动链轮转速,有利于提高切割效率。
五、结论1. 切割次数与割茬倾角呈正相关关系,切割次数越多,割茬倾角越大。
2. 割刀曲柄转速和拨禾链主动链轮转速对切割效果有显著影响,提高转速可增加切割次数和割茬倾角。
3. 在保证切割效果的前提下,适当提高割刀曲柄转速和拨禾链主动链轮转速,有利于提高切割效率。
六、建议1. 在设计玉米联合收获机时,应充分考虑切割装置的切割性能,以适应不同切割需求。
联合收割机往复式割刀传动机构运动学分析
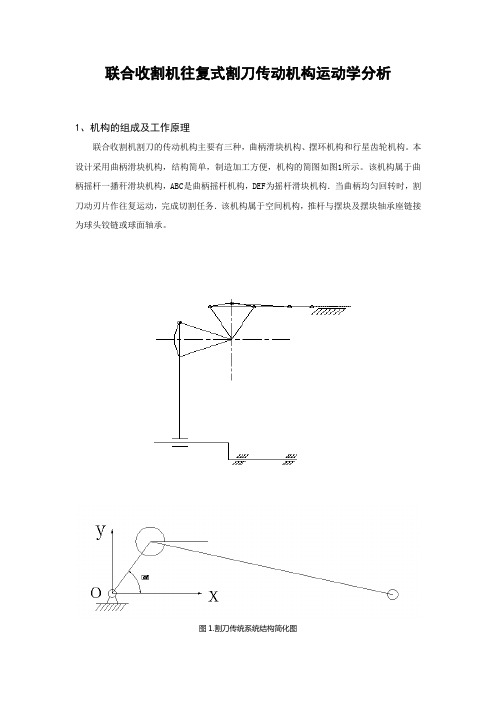
联合收割机往复式割刀传动机构运动学分析1、机构的组成及工作原理联合收割机割刀的传动机构主要有三种,曲柄滑块机构、摆环机构和行星齿轮机构。
本设计采用曲柄滑块机构,结构简单,制造加工方便,机构的简图如图1所示。
该机构属于曲柄摇杆一播秆滑块机构,ABC是曲柄摇杆机构,DEF为摇杆滑块机构.当曲柄均匀回转时,割刀动刃片作往复运动,完成切割任务.该机构属于空间机构,推杆与摆块及摆块轴承座链接为球头铰链或球面轴承。
图1.割刀传统系统结构简化图2数学模型的建立2.1主要参数的确定查农业机械设计手册,选取要设计的往复式切割器主要技术参数如下: 切割行程76.2mm ,曲柄转速468r/min ,割刀平均速度1.19m/s 。
摇杆尺寸拟定为L1=100mm ,曲柄尺寸拟定为L2=300mm ,摆块尺寸拟定为R2=100mm ,推杆L2=300mm ,R1=90mm ,则α=25.05°,2α=50.10°,L0=42.333mm 。
2.2数学模型的建立2.2.1矢量方程OA +AB =OC +CB =OB (1)OC +CD =OD (2)OD +DE =OE (3)1.2.2位移方程)4(0sin cos ⎪⎩⎪⎨⎧=⋅=⋅=A O A O A z t L y tL x ωω由(1)式得)5(cos 0sin sin cos 32223222⎪⎩⎪⎨⎧⋅+==⋅+=⋅+=⋅+=βαβαR z z L y yR x L x x C B A B C A B由(5)得2222tan AAy L y -=α,2α在1、4象限,2α可求,将2α代入(5)得sin 3β=T R L x C A =⋅+-222cos x α由矢量方程(2)得⎪⎪⎩⎪⎪⎨⎧-⋅+==-⋅+=)2cos(0)2sin(x 3131πβπβR z z y R x C D D C D (6)由(3)得11311]cos )2[cos(sin L R απβγ--=(7) E 点坐标为 ⎪⎩⎪⎨⎧+==⋅+=1110cos L z z y R x x D EE C E α(8) 2.2.3速度方程⎪⎩⎪⎨⎧=⋅⋅=⋅⋅-=0cos sin x 00A A A z t L yt L ωωωω(9) ⎪⎩⎪⎨⎧⋅⋅-==⋅⋅+=⋅⋅=⋅⋅-=332222332222sin 0cos cos sin ββααββαα R z L y yR L x x B A B A B (10) 由(10)中的2式得222cos αα⋅-=L y A (11) 将(11)式代入(10)式得322322223cos tan cos sin βαβααβ⋅⋅+=⋅⋅⋅-=R y x R L x A AA (12) ⎪⎪⎩⎪⎪⎨⎧-⋅⋅-==-⋅⋅=)2sin(0)2cos(313313πββπββR z yR x D D D (13) 113311cos )2sin(γπββγ⋅-⋅=L R (14)⎪⎩⎪⎨⎧⋅⋅-===111sin 00γγ L zz yx D E E E (15) 1.2.4加速度方程⎪⎩⎪⎨⎧=⋅⋅-=⋅⋅-=0sin cos x 2020A AA z t L y t Lωωωω(16)⎪⎩⎪⎨⎧⋅⋅-⋅⋅-==⋅⋅-⋅⋅+=⋅⋅-⋅⋅=⋅⋅-⋅⋅-=323233222222223232332222222cos sin 0sin cos sin cos cos sin ββββααααββββααααR R z L L y y R R L L x x B A B A B (17) 由(17)得22322222cos sin αααα⋅-+⋅⋅=L y y L A B (18) 3232323cos sin ββββ⋅⋅⋅-=R R x B (19) ⎪⎪⎪⎩⎪⎪⎪⎨⎧-⋅⋅--⋅⋅-==-⋅⋅--⋅⋅=)2cos()2sin(0)2sin()2cos(32313133231313πββπββπββπββ&&&&&&&&&&&R R z y R R x D D D (20) 1112113313311cos sin )2sin()2sin(γγγπββπββγ⋅⋅⋅+-⋅⋅--⋅=L L L R (21)⎪⎩⎪⎨⎧⋅-⋅⋅-===1211111cos sin 00γγγγL L z z y x D E E E (22)。
联合收割机往复式切割器运动特性研究
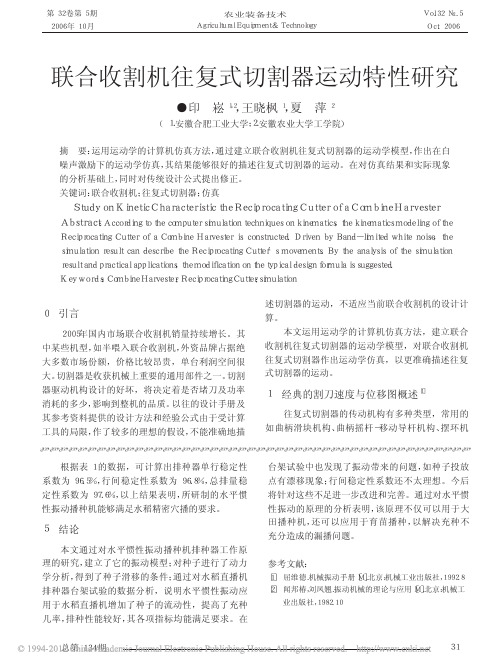
述切割器的运动,不适应当前联合收割机的设计计 算。
本文运用运动学的计算机仿真方法,建立联合 收割机往复式切割器的运动学模型,对联合收割机 往复式切割器作出运动学仿真,以更准确描述往复 式切割器的运动。
1 经典的割刀速度与位移图概述[1]
往复式切割器的传动机构有多种类型,常用的 如曲柄滑块机构、曲柄摇杆- 移动导杆机构、摆环机
Study on Kinetic Char acter istic the Recipr ocating Cutter of a Combine Har vester Abstr act:According to the computer simulation techniques on kinematics, the kinematics modeling of the
图4
3.2 在白噪声信号激励下的曲柄摇杆 - 移动导杆 机构仿真结果
图 5 是在白噪声信号激励下的割刀速度- 位移 图。这个图形可以看成有许多在横轴上共顶点的近 似椭圆组成,在纵轴方向上,椭圆径有多个值说明, 外力大小不同时,速度是不同的。这个仿真结果运行 了 30s。从图中可见,曲线分布呈疏密不等状,密条纹 的中间线就是加速度为 0 时的速度- 位移曲线,速度 正是以该组值为中心值上下波动。内圈的杂乱图线 对应的是机器启动时的加速过程。最外圈的图线相 当于机器空转被加速到最高速度。中间形成的密条 纹宽度就是速度波动的范围。图 6、7 分别是对应的 割刀位移- 时间图、割刀速度- 时间图。
0 引言
2005年国内市场联合收割机销量持续增长。其 中某些机型,如半喂入联合收割机,外资品牌占据绝 大多数市场份额,价格比较昂贵,单台利润空间很 大。切割器是收获机械上重要的通用部件之一。切割 器驱动机构设计的好坏,将决定着是否堵刀及功率 消耗的多少,影响到整机的品质。以往的设计手册及 其参考资料提供的设计方法和经验公式由于受计算 工具的局限,作了较多的理想的假设,不能准确地描
大豆联合收获机往复式切割器的使用维修技术
大豆联合收获机往复式切割器的使用维修技术
冯晓静;郑亚北;刘洪杰;刘江涛
【期刊名称】《农机使用与维修》
【年(卷),期】2022()6
【摘要】河北省是两熟区夏播大豆生产的重要省份,大豆机械化收获多采用一般谷物联合收获机进行。
切割器是联合收获机上的重要工作部件,其性能的好坏对工作
质量有很大影响。
由于夏播大豆收获季节性强,时间紧,工作强度大,作业过程中收获机容易出现割刀堵塞、切割速度减慢、作物割不断、连根拔起或中间有一行漏割等问题,影响收割质量和作业效率,降低了割刀使用寿命及安全性,一定程度上影响了机手的经济收益。
因此,分析了大豆联合收获机往复式切割器的结构、使用调整要求、维护保养和作业常见故障及排除方法。
【总页数】3页(P93-95)
【作者】冯晓静;郑亚北;刘洪杰;刘江涛
【作者单位】河北农业大学机电工程学院
【正文语种】中文
【中图分类】S233.4
【相关文献】
1.谷物联合收获机往复式切割器切割过程的研究—基于切割图分析
2.玉米联合收获机的使用与维修方式
3.玉米联合收获机的使用与维修
4.谈谈玉米收获机的使用情况——如何正确使用玉米联合收获机
5.玉米联合收获机的使用要点与维修方法
因版权原因,仅展示原文概要,查看原文内容请购买。
往复式切割器参数的数值模拟及优化
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!灵活等特点为太阳能的利用与开发提供了有益的探索。
[参考文献][1]余海.太阳能利用综述及提高其利用率的途径[J].新能源研究与利用,2004(3):34-4.[2]王雪文,王洋,等.太阳能电池板自动跟踪控制系统的设计[J].西北大学学报,2004(4):34.(编辑明涛)作者简介:杜微(1977-),硕士研究生,从事单片机控制方面的研究。
收稿日期:2005-11-26!!!!!!!!!!往复式切割器参数的数值模拟及优化夏萍,陈黎卿,朱德泉,李兵(安徽农业大学工学院,安徽合肥230036)1引言长期以来,联合收割机往复式切割器的设计是建立在图解分析和试验的基础上,很多文献只是对切割图中空白区、重割区进行定性分析,要求空白区、重割区面积愈小愈好。
本文在分析切割工作过程的基础上,提出往复式切割器切割图中空白区面积的大小可以表示切割阻力的大小,重割区面积的大小可以表示功率消耗的大小。
利用Matlab软件强大的数据处理能力,对切割器参数进行数值模拟,对割区面积进行定量计算,建立切割器参数对切割阻力和功率消耗影响的非线性回归模型。
数值模拟方法可以将复杂隐性的数学关系式显现化,减小设计程序的多次调用,将分析与设计集成起来。
模拟结果为联合收割机切割部件的开发提供了可靠依据。
为了对切割器参数进行数值模拟及优化,需对影响切割阻力和功率消耗关键参数进行分析。
影响切割器关键参数有切割器类型、切割器运动参数和结构参数等。
切割器运动参数有割刀转速n、机器前进速度vm。
切割器结构参数有动刀片刃部高度h、宽度a、顶宽e、切割角α和定刀片宽度b、切割角β等。
图1为切割器结构参数示意图。
2模型的建立往复式切割器的切割机理是割刀作往复直线运动,在护刃器的配合下进行有支持切割。
用Matlab软件画切割图,如图2所示。
由图可知:在定刀片轨迹线内的作物被护刃器及定刀片推向两侧,在相邻两定刀片间的作物,由于所处位置的不同,有下述不同的情况:扫过区(Ⅰ区)中的作物,被护刃器及定刀片推向两侧被切割。
玉米茎秆往复切割力学特性试验与分析
玉米茎秆往复切割力学特性试验与分析李耀明;秦同娣;陈进;赵湛【期刊名称】《农业工程学报》【年(卷),期】2011(027)001【摘要】In order to reduce the cutting rome and power consumption and improve the cutting property, a cornstalk cutting test-rig composed of mechanical equipment and measurement system was developed. Then a cantilever weigh sensors, a high frequency digital acquisition card and the software of LabVIEW were applied in the measurement system.Cornstalk experiments were carried out on the test-rig. According to the measuring cutting force, the cutting power consumption were calculated, and the influence of cutting angle, cutting speed, cutting position, the epidermal and node of cornstalk on the cutting force and consumption were analyzed. The better cutting property and the smaller values of cutting force and consumption were obtained with the cutting angle closed to 20°, with the increasing of cutting position and speed, the peak cutting force and the cutting power consumption were both decreased gradually. The epidermal cutting force accounted for about 63%-83%, and the cutting force for the node increased about 56% compared with that for the intemode. The research can provide theoretical basis for improving the cutting property.%为了研究玉米切割器切割茎秆的切割力与切割功耗,提高切割性能,研制了摆切式茎秆切割试验台.采用悬臂梁称重传感器、高频数据采集卡和LabVIEW软件组成的测试系统进行切割力学性能影响因素试验研究.根据测得的切割力连续变化曲线求得切割功耗,并分析了削切角、切割速度、切割位置、茎秆外皮与节点等因素对切割力及功耗的影响.试验结果表明:峰值切割力和切割功耗随着切割速度的增大和切割位置的增高而逐渐减小,且在削切角为20°左右时较小,切割性能较好;峰值切割力和切割功耗在节点处比节间增加56%,外皮所需切割力占63%~83%.该研究为提高切割器的切割性能提供了理论依据.【总页数】5页(P160-164)【作者】李耀明;秦同娣;陈进;赵湛【作者单位】江苏大学现代农业装备与技术省部共建教育部重点实验室,镇江,212013;江苏大学现代农业装备与技术省部共建教育部重点实验室,镇江,212013;江苏大学机械工程学院,镇江212013;江苏大学现代农业装备与技术省部共建教育部重点实验室,镇江,212013【正文语种】中文【中图分类】S225.3【相关文献】1.圆盘切割器切割玉米茎秆的试验与分析 [J], 倪长安;蔺公振2.圆盘式玉米茎秆切割试验台的设计与切割过程分析 [J], 邓玲黎;李耀明;徐立章;秦同娣;庞靖3.龙须草茎秆往复式切割试验研究 [J], 罗海峰;汤楚宙;邹冬生;李顺春;吴万刚;邹运梅4.田间玉米茎秆往复切割试验台 [J], 蒋韬;侯加林;李天华;邵园园;王震;刘林5.谷子茎秆切割力学特性试验与分析 [J], 张燕青;崔清亮;郭玉明;李红波因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
谷物联合收获机往复式切割器切割过程的研究—基于切割图分析陈振玉,周小青(南通职业大学,江苏南通226007)摘要:为了获得谷物联合收获机的理想工作状态,通过切割图分析,对联合收割机往复式切割器切割过程的一次切割区、重割区以及漏割区面积在不同切割情况下的变化特性进行了理论分析,得出了相应的速度匹配参数。
在割刀切割速度与机器前进速度配比等方面为谷物联合收获机往复式切割器工作性能和作业效果的改善提供了理论依据和工作参数设计参考。
关键词:谷物;联合收获机;往复式切割器;切割图;速度匹配中图分类号:S225.3文献标识码:A文章编号:1003-188X(2012)07-0073-050引言当前,谷物联合收获机已经成为最重要的收获机械,在我国已经得到了广泛的使用。
但是国内谷物联合收获机往复式切割器的切割速度与机器前进速度在不同工作条件下的合理搭配问题一直处于参考国外样机参数或半理论半经验选择状态,很多场合如高速收获状态下还难以达到理想工作状态。
因此,对谷物联合收获机往复式切割器切割过程进行理论研究和分析很有必要。
1切割器及工作参数的选定1.1切割器标Ⅱ型切割器简图如图1所示。
图1标II型切割器1.2工作参数选择范围割刀曲柄转速n/r·min-1:300 1500收稿日期:2011-08-18作者简介:陈振玉(1958-),男,上海人,研究员级高工,(E-mail)chenzynt@126.com。
机器工作速度V/km·h-1:4 8割刀进距H/mm:41.67 111.112切割过程分析往复式切割器工作时,其动刀片往复运动的方程式为X=r(1-cos wt)标Ⅱ型切割器切割图如图2所示。
根据运动方程式可作出割刀相对地面运动的轨迹,即切割图。
切割图是对于实际切割过程的简化表示,通过切割图的分析可以看到切割过程影响要素及其变化规律。
图2标II型切割器切割图在图2中,在定刀片轨迹线内(IV区)的作物被护刃器及定刀片推向两侧。
在相邻两定刀片间的作物,由于所处位置的不同,有3种不同的情况:①一次切割区(I区)中的作物,在刀刃第1次在该区域运动时即被切割;②重割区(II区)中的作物,在割断后其割茬被另一刃口重复触;③漏割区(III区)中的作物,在刀刃向右运动时未曾触及,在割刀回程运动中被切断。
在某一条件下,重割区和漏割区希望达到最小,这样就要平衡重割区和漏割区的面积,不能只顾其一。
在实际生产中,漏割区影响谷物的切割效果,如谷物的损失情况、割茬的高度差等,重割区则主要影响割刀的切割功率。
即是,随漏割区的增大,谷物的损失会增大,割茬的不平整度增大,严重时禾秆会出现撕裂;随重割区的增大,谷物的损失情况会降低,割茬不平整度会减小,但是功率损耗却在增大。
3由切割图分析速度配比3.1机具前进速度不变、改变割刀曲柄转速图3所示为机具前进速度不变,改变割刀曲柄转速时的切割图组。
其中,切割图下标为机具前进速度和割刀曲柄转速,如“8700”,即是前进速度8km/h、转速700r/min时的切割图(本文中类似图示均如此,不另加说明)。
图3前进速度不变、改变割刀曲柄转速的切割图按照实际生产要求,现在的谷物联合收获机一般前进速度为4 8km/h。
由图3可以很清楚地看到,当机具前进速度不变时,随着割刀曲柄转速的增大,切割图中的重割区在不断增大,同时漏割区在减小,一次切割区的面积也在不断减小。
这种情况下,对于一个行程,切割区面积减小,其中包含的谷物株数减少,割刀的功耗、震动均在减小,切割效果渐佳;而对于整个区域,株数一定,则需增加行程次数,整体功耗增大,不利于节能。
将切割图中的各区域的面积做出一系列各区域面积变化趋势图,如图4所示。
图4一定前进速度下,切割图各区域面积随割刀曲柄转速的变化趋势为使漏割区及重割区面积最小,漏割区要尽量小,且使一次切割区的面积偏小,则由图4可得:当前进速度为8km/h时,割刀曲柄转速为1200 1300r/min比较符合条件,此时漏割区和重割区均比较小,而且漏割区小于重割区保证切割质量;同样可知,7km/h 时取1070 1150r/min,6km/h时取900 1000r/ min,5km/h时取750 850r/min,4km/h时取600 650r/min,这些数据均符合要求。
由于实际联合收获机的切割器有唯一的割刀曲柄转速,应兼顾各种速度下的切割状况,实际中一般要求高效快速。
由此可知:当机具前进速度为4 6km/h时,800 850r/min 比较符合切割要求;6 8km/h时,1100 1200r/min 比较符合条件。
3.2割刀曲柄转速不变、机具前进速度改变割刀曲柄转速不变,机具前进速度改变的切刀图如图5所示。
由图5可知,当割刀曲柄转速不变时、机具前进速度增大,切割进距变大,重割区减小,漏割区增大,一次切割区增大。
对于单个行程,切割区面积增大,即是一次切割的株数增多,切割负荷增大,同时割茬的高度差异增大;对于整个区域,行程减少,有利于节能。
现今我国的收获机械都是割刀曲柄转速一定,因此这种情况的分析有很重要的现实意义。
为了清晰直观,我们做出切割图各区域面积变化图,如图6所示。
图5割刀曲柄转速不变、机具前进速度改变的切割图由图6可以清晰地看出,随着前进速度的增大,切割图中各区域面积的变化趋势以及变化幅度:600r/ min时,符合切割要求的速度低于5km/h;700r/min 时,在4 6km/h的切割效果较好;800r/min时,也是4 6km/h的效果好些;900r/min时,5 7km/h内的切割效果较好;1000r/min时,6 8km/h的切割效果好。
鉴于以上分析,由图6得出,900 1000r/min时,对于机器前进速度变化时(在4 8km/h之间),适应性较好,各个区域的面积也比较符合切割要求。
同时应该看到,图像的变化较大,难以找到一个合适的转速值,使得机具前进速度在4 8km/h一直保持良好的切割效果,因此对于实际情况应分为不同时间段:当机具前进速度为4 6km/h时,割刀曲柄转速700 800r/min可基本满足要求;6 8km/h时,割刀曲柄为1000 1100r/min时,基本满足要求。
对于割刀曲柄转速一定的机器,这些值可以基本满足收获要求。
图6割刀转速一定、切割图各区域面积随前进速度变化趋势3.3模拟实际切割分析切割过程在实际切割过程中,刀片不止一个,以下以相邻两个刀片为例,模拟实际切割过程。
以割刀曲柄转速500r/min为例分析,如图7所示。
第2个刀片会在行程末扫过临刀的切割区域。
假设当割刀扫过谷物是可以完成谷物的切割,则可以看出,切割图中出现了很大面积的重割区(相邻两刀重割区),而且此类重割区刚好扫过临刀第1行程的漏割区,即使得漏割区大幅减少。
此时,相当于一个刀的分析,在满足切割要求的前提下,割刀进距增大。
通过分析和试验,在前进速度4km/h、转速500r/min、H=66.67mm时最为符合要求,此时漏割区及重割区面积都比较小。
图7相邻两刀切割过程图8中的各个不同区域表示切割过程中不同切割状态(假设切割区域的谷物行距10mm,株距10mm,切割器离地面高度为150mm)。
在此切割图中,相邻两刀片的切割会出现重叠区域,从而使切割图发生改变。
切割开始后,切割器经过区域如图8中网格所示,在单个刀片的切割区域有左右两个漏割区。
在推动禾秆的区域,将左部漏割区内的禾秆推至下一行程的切割区。
在一次切割区中的禾秆由动刀扫过切割,在第2行程动刀又扫过一片区域。
其中,会出现重割区,在一个刀片时也会出现漏割区,而相邻动刀片会扫过定刀下的禾秆、右部漏割区以及一部分切割区的禾秆。
如果假设动刀扫过禾秆即能切割,按照以上分析,这种情况下禾秆割茬会很平整。
但是,实际情况中割茬均有一定的不平整,也就是说,动刀扫过时,并不一定就切割,但是当禾秆推到定刀处时,由于定刀片的支撑,完成切割。
在此情况下,以图9中的黑框区域分析计算割茬高度,画出割茬高度分布图。
如图9所示,由于切割器离地高度为150mm,实际割茬应该在150 250mm。
由图9可以看出割茬分布在150 175mm之间,符合实际要求。
图8H=66.67mm的相邻两刀切割图图9割茬高度分布图4结论通过对谷物联合收割机往复式收割器切割图对切割过程的分析,详细研究了切割过程中的具体情况,可知当机具前进速度为4 6km/h时,在800r/min时比较符合切割要求;6 8km/h时,1100r/min比较符合条件。
本课题为往复式切割器工作性能和作业效果的改善提供了理论依据和工作参数设计参考。
但是,随着工作环境的不同,切割效果会有所不同,相关的研究还需进一步深入。
参考文献:[1]宋建农.农业机械与装备[M].北京:中国农业出版社,2006.[2]邓建中,刘之行.计算方法(2版)[M].西安:西安交通大学出版社,2001.[3]夏萍,陈黎卿,朱德泉,等.往复式切割器参数的数值模拟及优化[J].机械工程师,2006(5):82-83.[4]杨树川,何东健,杨术明.往复式切割器割刀磨损对切割图中区域面积的影响[J].农业机械化,2006(1):107-108.[5]GUARNIERI A,MAGLIONI C,MOLARI G.Dynamic analy-sis of reciprocating single-blade cutter bars[J].Transac-tions of the ASABE,2007,50(3):755-764.Study on the Cutting Process of Reciprocating Cutter in Combine HarvesterBased on Cutting-chart AnalysisChen Zhenyu,Zhou Xiaoqing(Nantong Vocational College,Nantong226007,China)Abstract:For achieving the ideal working state of combine harvester,based on cutting-chart,analyze the once-cutting area,re-cutting area and missing-cutting area in the cutting process of combine harvester.Obtain the speed matching parameters.Provide the theory evidence and reference characteristics for reciprocating cutter in combine harvester.Key words:grain;combine harvester;reciprocating cutter;cutting chart;speed match(上接第72页)应规范玉米种子物理几何特性,以满足机械化排种要求,使农机与农艺更好地融合,进而提高机械化作业效率。