雷达导引头 第1章
雷达原理

4
雷达原理
2.4 固态发射机
• 固态发射机发展概况和特点
– 逐步替代常规微波电子管发射机,优点如下 • 寿命长、可靠性高 • 体积小、重量轻 • 工作频带宽、效率高 • 系统设计和运用灵活、维护方便, 成本较低
– 平均功率大而峰值功率受限,适用于高工作比 雷达,如连续波雷达
– 在 UHF ~ L 波段发展较快
• 雷达的基本概念
– 利用电磁波的二次辐射、转发或目标固有辐射 来探测目标,获取目标空间坐标、速度、特征 等信息的一种无线电技术,相应的设备称为雷 达站或雷达机,简称雷达
– 二次辐射:反射(单基地)、散射(多基地)
– 转发:二次雷达(导航)
– 固有辐射:通信及雷达信号(被动/无源)、随 机热运动电磁辐射(导引头)
雷达原理
1.1 雷达的概念
• 雷达信号处理
– 目标信号总是被淹没于 杂波(+干扰)+ 噪声
的背景中 – 杂波及干扰强度往往超过目标信号的千万倍 – 信号处理作用
• 增强待测目标信噪比,提取目标参数 • 抑制杂波和干扰信号
雷达原理
1.2 雷达探测原理
• 雷达回波中的可用信息
– 斜距 R ( Rmax 可由雷达方程估算)
• 总效率
– 发射机输出功率与其输入总功率之比 – 对主振放大式发射机应改善输出级的效率
雷达原理
2.2 雷达发射机电性能指标
• 信号形式(调制形式)
– 不同信号形式对发射机的要求各异
波形 简单脉冲 脉冲压缩 高工作比多卜勒
调制类型 矩形调幅
线性调频、相位编码 矩形调幅
工作比(占空比)% 0.01 ~ 1 0.1 ~ 10 30 ~ 50
船用雷达详细介绍演示幻灯片
1. 基本原理:
基本雷达 a 天线
方位量化
d PPI /
b 定时
光栅扫描
收发机
转换
c 视频量化 e
扫描信号 光栅雷达信号 发生器
直角坐标 数据内存
a — 原始方位和船首信号;b — 触发脉冲;c — 原始视频;光雷栅达扫描 d — 数字方位信号;e— 数字视频
①将原始视频杂波抑制,然后与天线方位信号、船艏信号量化 ②进行坐标转换,产生光栅扫描信号
防管内打火
老练方法:
1.只加灯丝电压工作半小时以上 2.加较低的高压工作一段时间(时间视具体情况定) 3.如无打火现象,逐渐加高压到正常值
17
第一节 雷达发射机(Transmitter)
四、正常工作标志
通过收发箱内的表头或显示器上的磁控管电流指示判断
有——正常;无——不正常
五、性能检测
1.磁控管工作是否正常
2、二单元雷达: 天线收发机、显示器、中频电源
10
三、雷达传感器与 IBS
现代雷达 IBS的重要组成部分 定位、导航、避碰
主要传感器
雷达 罗经 计程仪 GNSS AIS ECDIS
11
第二章 船用雷达设备
12
第一节 雷达发射机(Transmitter)
一、组成部分及作用
至显示器 至接收机
脉冲调制器
触发脉冲 产生器
予调制器
调制器
发射机
至天线
磁控管
特高压 调制器
磁控管
低压 电源 来自电源
发 射 开 关
延 时 开 关
门 特高压 开 电源 关
雷达发射机
收发 开关
门开关 至接收机
触发脉冲产予调制器 生器
【国家自然科学基金】_雷达导引头_基金支持热词逐年推荐_【万方软件创新助手】_20140801
推荐指数 3 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
2013年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42
2013年 科研热词 雷达扩展目标 雷达工程 雷达导引头 雷达/红外双模导引头 雷达 隔离度寄生回路 隔离度 阻尼力矩 遗传算法 速度矢量估计 适应性 脱靶量 箔条干扰 矩形微带天线 相控阵雷达导引头 电磁干扰环境 波束综合 比例导引 极化雷达 极化检测 极化技术 最小二乘法 散射特性 抗干扰 成像系统 弹簧力矩 引制一体化 平台导引头隔离度 干扰检测 干扰抑制 巡航导弹 导引头 太赫兹 多普勒速度 坐标变换 固态器件 合成孔径 匀速直线运动 制导系统稳定性 共形阵列 全捷联 mimo雷达 推荐指数 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
2014年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20
科研热词 雷达导引头 抗干扰 辐射控制 质心干扰 被动雷达导引头(prs) 被动雷达导引头 缝隙等角螺旋天线 物元模型 热噪声 检测概率 极化 杂波 最晚辐射 斜投影 性能评估 微带线-槽线巴伦 宽带天线 复合导引头 主动通道 k分布
2010年 序号 1 2 3 4 5 6 7 8 9
科研热词 波达方向矩阵法 极化域-空域联合估计 数字高程图 小平面单元 均匀圆阵 反辐射导弹 全弹道仿真 sar导引头 rcs计算
被动雷达导引头的关键技术研究
和 俯仰 两 个偏 角 ,形成 数字 代码 。但这 种 方法测 出
才 能唯 一确 定雷 达信 号 的到达 方 向 ,而且这 种
当:
瞬 时频 率 :
If l z/ 2 m/ r 2 n
f=一 (, / n ) 2 m
() 5
() 6
方 法 的测 向范 围不 能覆 盖全 方位 。在本 方案 中采 用 线 性相 位 多模 圆 阵,用 多个天 线 组成 阵列 ,可实 现 全 方位 内的无模 糊测 向 ,而且 它是 一种 宽带 测 向技 术 , 不 同 的信 号 频 率 只 影 响 模 的 幅 度 而 不 影 响 相
在反 辐射 导弹 ( M )等 被动 雷达 导 引头 中 , AR 导 引头 接收 敌方 雷达 辐射 的电磁 信号 ,从而 测定 目 标 和它 的相 对位 置并 形成 导 引指 令 ,引 导导 弹摧 毁
的基 本 原理
处 理 系 统
Ur= Ue E
F (= ∑ P )
=∑ (Ⅳ ( P l 9 Ⅳ 一] ] ) J
K+ c , w o
: P
= 一
+1- ,
N
=
co s
(2 , 一" 1 o )
. v
式中:
为接 收 到 的复信 号 ,对 式 ( )中 的天 线 8
在式 ( ) , 9 中
宽 带 瞬 时 测 频 接 收 机
及 分 选 系 统
系 统等 组 成 。 宽 带瞬 时 测频 接 收 机 快速 捕 获 目标
的频 率参 数 并进 行高 精度 频率 测量 ,经 过 目标 识 别 及 分选系 统后 ,选 出威胁 等 级最 高 的信 号频 率 ,控 制频 率综 合 系统 ,产 生 宽带 多路测 向系统 需要 的 本 振信 号 ,打 开 多路测 向系统 ,形成 目标雷 达 的位 置 信息 ,数 据 综合 处理 系统 经数 据 融合 形成 目标 的 相 关信 息 ,并进 行 信 息分 配 ,形成 导 引指 令 , 控 制
相控阵雷达导引头总体技术研究
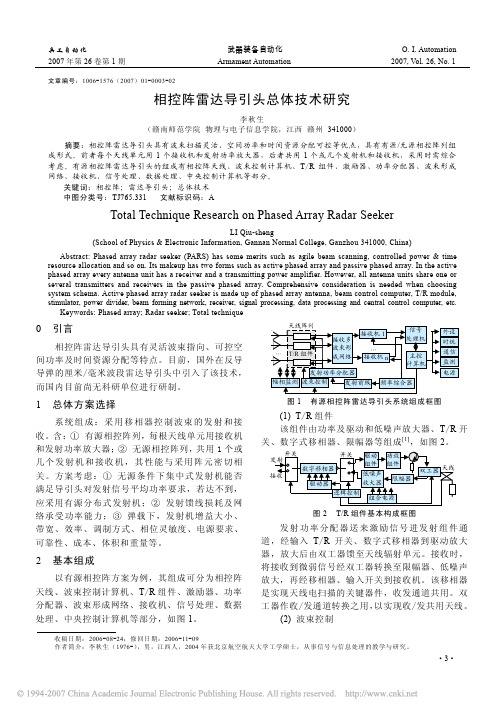
文章编号:1006-1576(2007)01-0003-02相控阵雷达导引头总体技术研究李秋生(赣南师范学院物理与电子信息学院,江西赣州 341000)摘要:相控阵雷达导引头具有波束扫描灵活、空间功率和时间资源分配可控等优点,具有有源/无源相控阵列组成形式。
前者每个天线单元用1个接收机和发射功率放大器,后者共用1个或几个发射机和接收机,采用时需综合考虑。
有源相控阵雷达导引头的组成有相控阵天线、波束控制计算机、T/R组件、激励器、功率分配器、波束形成网络、接收机、信号处理、数据处理、中央控制计算机等部分。
关键词:相控阵;雷达导引头;总体技术中图分类号:TJ765.331 文献标识码:ATotal Technique Research on Phased Array Radar SeekerLI Qiu-sheng(School of Physics & Electronic Information, Gannan Normal College, Ganzhou 341000, China) Abstract: Phased array radar seeker (PARS) has some merits such as agile beam scanning, controlled power & time resource allocation and so on. Its makeup has two forms such as active phased array and passive phased array. In the active phased array every antenna unit has a receiver and a transmitting power amplifier. However, all antenna units share one or several transmitters and receivers in the passive phased array. Comprehensive consideration is needed when choosing system schema. Active phased array radar seeker is made up of phased array antenna, beam control computer, T/R module, stimulator, power divider, beam forming network, receiver, signal processing, data processing and central control computer, etc.Keywords: Phased array; Radar seeker; Total technique0 引言相控阵雷达导引头具有灵活波束指向、可控空间功率及时间资源分配等特点。
第1章 雷达标绘基础知识课件

TIME IN MINUTES
第四节 雷达标绘纸 二、雷达标绘纸使用与注意事项 要注意雷达观测的模式,是北向上还是航向向 上!
SHIP
TIME
BEARING
RANGE
180
SPEED IN KNOTS
OWN SHIP
TARGET NO。 CPA TCPA COURS E SPEED ASPECT
DATE
OWN TIME SHIP'S COURSE ALTERATION MANOEUVRES SPEED ALTERATION
第三节
运动模式的选择
3、航向向上图象稳定相对运动模式 ①应用 值班驾驶员在避让、雷达观测和船舶定位时经常 使用。(综合前两种显示的优点)
第三节
运动模式的选择
② 特点 ⅰ、船首线指向荧光屏的上方。 ⅱ、可直接读取真方位(利用电子方位圈)和相对 方位(固定刻度圈)。 ⅲ、本船转向时,船首线转动,物标回波保持稳定。 转向结束后,按“新航向向上”按钮,船首线和图 象快速并同步转动,使船首线指向荧光屏的上方。
Vt
Vr + V。= Vt
V。 M
Vr
第一节 常用术语及一般定义 三、船舶间相对关系 1.船速比(K)及其意义 本船与来船船速比 K=1:两船船速相等 K>1:本船船速比他船船速大 K<1:本船船速比他船船速小 K>1 本船船速快,本船避让效果好。
第一节 常用术语及一般定义 2.相对航向线弦角q 来船相对运动轨迹,称为相对航向线,也称相对 运动线 HL
M Vr
第二节
船舶的真运动与相对运动
②上等式两边同时乘以相同的时间可得 Sr + S0 = St 其中: Sr :相对航程 S0 :本船航程 St :他船航程
《雷达导引头概论》读书笔记思维导图PPT模板下载
5.3 指令形成
0 1
5.1.1 常 规检测
0 2
5.1.2 恒 虚警检测
0 3
5.1.3 预 定检测
0 4
5.1.4 高 分辨检测
0 6
5.1.6 积 累检测
0 5
5.1.5 识 别检测
5.2.1 速度信息 5.2.2 距离信息
5.2.3 角度信息 5.2.4 仿形处理
5.3.2 制导指令
5.3.1 管理指令
06 第6章 主动导引头
目录
07 第7章 半主动导引头
08 第8章 被动导引头
09 第9章 复合导引头
010 第10章 系统设计
011 第11章 分系统技术
012 第12章 试验技术
目录
013 附录A 缩略术语汇总 表
015 参考文献
014
附录B 物理量符号汇 总表
本书介绍雷达导引头的基本体制和相关技术,全书共12章,内容包括概述、目标、环境、信号与噪声、导引 头基本功能、主动导引头、半主动导引头、被动导引头、复合导引头、系统设计、分系统技术和试验技术。本书 可作为从事雷达导引头研制工作的工程技术人员和高等院校相应专业师生的参考书。
11.3.6 信道化 接收机
11.3.5 锁相接 收机
11.3.7数字化接 收机
11.4.1 功能与技 术要求
11.4.2 硬件结构
11.4.3 软件流程
11.4.4 主要子程 序
11.5.1 功能 1
与技术要求
11.5.2 原理 2
框图与主要部 件
3 11.5.3 角预
定回路
4 11.5.4 角稳
10.5.2 可靠 2
性模型
3 10.5.3 可靠
相控阵雷达导引头关键技术初探_李秋生

1 ) 产生波束驻留指令 , 包 括波束的角位置 、发射时间 、频 率 、波形 、脉冲周期 、检测门限 、 波束驻留标志等 ;
2) 对波束控制和信号处理 等实施统一管理 ;
3) 处理目标回波数据 , 包 括检测 、跟踪及相关处理 ;
4) 为控制系统提供所需的 数据 (指令 ) ;
5) 使导引头 、计算机资源 与整个任务负载相匹配 ;
此外 , 具有与弹头共形的曲 面毫米波相控阵雷达导引头国外 也早已在开展技术攻关 , 目前阵 元配置 、波束控制及馈电结构等 方面还存在诸多困难 。
2 总体方案选择 与地面或机载相控阵雷达类
似 , 相控阵导引头的典型组成方 案是用移相器控制波束的发射和 接收 , 共有两种组成形式 : 一种 称为有源相控阵列 , 每个天线单
本文 2006208214收到 , 作者系赣南师范学院硕士研究生
飞航导弹 2007年第 6期
·55·
© 1994-2010 China Academic Journal Electronic Publishing House. All rig, 张明友. 雷达系统. 北 京 : 电子工业出版社 , 2001
[ 2 ] 张光义. 相控阵雷达系统. 北京 : 国防工业出版社 , 1994
[ 3 ] 殷连生. 低副瓣有源相控阵天馈 系统中的一体化设计. 电子与信 息学报 , 2002, 24 (10) : 1412~ 1417
RΔα (m , n) /RA (m , n) , RΔβN (m ,
n) = RΔβ (m , n) /RA (m , n) 。为 解决和差矛盾并简化馈电网络的 设计 , 接收波束的和差形成一般 采用部分独立的方法 , 例如可选 择和差独立点数尽可能少的贝利 斯分布来设计 [ 3 ] 。 3. 3 捷联去耦
雷达导引头技术特点分析
雷达导引头技术特点分析摘要:本文就某功能雷达导引头制导性能进行简要分析与探索,在其目标特性的基础上进行了更加详尽的探索,进一步阐述导引头对信号类型及分辨的功能,尝试设计了导引头在地面及空中的工作内容及形式,并对其工作效果的精密性进行测定,在不断改进过程中使得其工作的精密度更高,探索出导引头制导性能有可能向更精确的方向发展。
关键词:雷达;导引头;制导性能引言:从经济角度来讲,对雷达目标最好的发现方式就是采用精密度较高且耗材较少,成本较低技术去实现。
SAR成像末制导体成本相对较高,且对数据、弹道及其他要求相对更为严苛。
因此,在此类工作当中并不适用。
本文以此为研究角度,首先通过信号分析对导引头进行信号形式的应用设计,而后进行工作内容具体形式的设计,通过仿真分析论证导引头的性能。
一、雷达导引头的信号分析雷达制导分为两类:雷达波束制导和雷达寻的制导。
雷达波束制导雷达波束制导系统由载机上的雷达、工作部上的接收装置和自动驾驶仪等组成。
载机上的圆锥扫描雷达向目标发射无线电波束并跟踪目标。
工作部发射后进入雷达波束,工作部尾部天线接收雷达波束的圆锥扫描射频信号,在工作部上确定工作部相对波束旋转轴(等强线)偏离的方向,形成俯仰和航向的控制信号,通过自动驾驶仪控制工作部沿等强线飞行。
等强线是指向目标的,故工作部飞向目标。
雷达寻的制导又称雷达自动导引,分为主动式雷达导引、半主动式雷达导引和被动式雷达导引三种。
(一)目标特性分析雷达末制导导引头主要在毫米波频段进行工作,其波长相比目标尺寸过于渺小,切在光学区进行工作,雷达信号在承接过程中将形成多个扩散中心,若通过宽带发射信号进行接收,将会使目标的回波距离包可多个反应目标的特性和特征,使得导引头可以更加轻松地对目标进行辨别。
如果在地面上遇到目标体相对较小的情况,雷达很难截获其发射的截面积,且受地形起伏树木及建筑物的影响,会使雷达的分辨系统更难以识别,导致目标的检测信号被淹没在噪声和其他波形当中。
第 1 章 绪论
位为μs, 回波脉冲滞后于发射脉冲为一个微秒时, 所对应的目
标斜距离R为
R2ctr 15m 00.15km
能测量目标距离是雷达的一个突出优点, 测距的精度 和分辨力与发射信号带宽(或处理后的脉冲宽度)有关。脉冲越 窄, 性能越好。精品课件来自第一章 绪 论 发射脉冲
回波
t 噪声
tr
tr
t
图1.3 雷达测距
天线 收发转换开关
发射的电磁波
接收机 信号 处理机
显示器
接收的电磁波 R
目标
图1-2 雷达的原理及其基本组成
精品课件
第一章 绪 论 由雷达发射机产生的电磁能, 经收发开关后传输给天线,
再由天线将此电磁能定向辐射于大气中。电磁能在大气中以光 速(约3×108m/s)传播, 如果目标恰好位于定向天线的波束内, 则它将要截取一部分电磁能。目标将被截取的电磁能向各方向 散射, 其中部分散射的能量朝向雷达接收方向。雷达天线搜集 到这部分散射的电磁波后, 就经传输线和收发开关馈给接收机。 接收机将这微弱信号放大并经信号处理后即可获取所需信息, 并将结果送至终端显示。
一起始方向(正北、 正南或其它参考方向)在水平面上的夹角。
精品课件
第一章 绪 论
O 雷达
P
目标
R
H
D
a
B 正北
图1.1 用极(球)坐标系统表示目标位置
精品课件
第一章 绪 论
(3) 仰角β:斜距R与它在水平面上的投影OB在铅垂
面上的夹角, 有时也称为倾角或高低角。 如需要知道目标的高度和水平距离, 那么利用圆柱坐
其距离和角度随时间变化的规律中得到,并由此建立对目标跟
踪; 雷达的测量如果能在一维或多维上有足够的分辨力, 则可
雷达导引头概论

雷达导引头概论雷达导引头(Radar Seeker Head)是一种用于制导和控制导弹、火箭弹等武器系统的关键部件。
本文将对雷达导引头的基本原理、结构和应用进行概论介绍。
一、导引头的基本原理雷达导引头采用雷达技术来实现目标探测、跟踪和制导。
其基本原理是利用雷达发射出的脉冲电磁波与目标反射回来的信号进行相互作用,通过分析和处理回波信号来获取目标的位置、速度等信息,进而实现导弹对目标的精确定位和跟踪。
二、导引头的结构雷达导引头一般由天线、发射器、接收器、信号处理器和制导计算机等组成。
天线负责发射和接收电磁波,发射器产生高功率的雷达脉冲信号,接收器接收和放大回波信号,信号处理器对接收到的信号进行滤波、放大、脉冲压缩等处理,制导计算机对处理后的信号进行目标跟踪和导引计算。
三、雷达导引头的应用雷达导引头广泛应用于各种导弹系统中,如空空导弹、地空导弹、舰空导弹等。
它通过高精度的目标探测和跟踪能力,提高了导弹的命中精度和战斗效能。
同时,雷达导引头也被用于地面反导系统、防空系统和火控系统等领域,发挥着重要的作用。
四、雷达导引头的发展趋势随着科技的不断进步,雷达导引头也在不断发展和改进。
一方面,导引头的体积不断缩小,重量不断减轻,以适应小型化、轻量化的武器平台需求。
另一方面,导引头的性能不断提高,包括探测距离的增加、目标识别能力的提高、抗干扰性的增强等。
此外,雷达导引头还在融合其他技术,如红外、激光等,以提高对复杂目标的识别和打击能力。
五、雷达导引头的挑战与展望虽然雷达导引头在导弹制导领域取得了显著的成就,但仍面临一些挑战。
首先是目标探测与识别难度的增加,尤其是对于低可探测目标和高速机动目标的处理。
其次是对抗电子干扰和隐身技术的挑战,如敌方使用干扰器、雷达反射涂层等手段。
此外,雷达导引头还需要在复杂的电磁环境中工作,如多雷达系统共存、频谱资源争夺等。
展望未来,雷达导引头仍将继续发展。
随着人工智能和机器学习等技术的发展,导引头的自主决策和智能化能力将不断提升。
雷达导引头目标跟踪波形选择

第45卷第4期2023年8月指挥控制与仿真CommandControl&SimulationVol 45㊀No 4Aug 2023文章编号:1673⁃3819(2023)04⁃0132⁃08雷达导引头目标跟踪波形选择熊芳勇1,2,王建涛2,黄㊀洁2,党同心2(1.中国人民解放军94326部队,山东济南㊀250000;2.信息工程大学,河南郑州㊀450001)摘㊀要:为研究末制导跟踪阶段雷达导引头的波形选择,提出了一种认知雷达导引头制导跟踪过程中的波形选择算法㊂首先,结合导引头制导和观测滤波模型,建立了雷达导引头波形选择的处理流程;其次,使用交互式多模型无迹卡尔曼滤波(IMMUKF)算法来解决非线性跟踪问题;基于最大互信息准则搜索波形参数使得跟踪误差最小㊂仿真结果表明,波形选择算法可以有效提高导引头跟踪精度,并提供更为平稳的制导过载㊂关键词:目标跟踪;认知雷达;导引头;波形选择中图分类号:TJ765 331㊀㊀㊀㊀文献标志码:A㊀㊀㊀㊀DOI:10.3969/j.issn.1673⁃3819.2023.04.020WaveformselectionfortargettrackingofradarseekerXIONGFangyong1,2,WANGJianTao2,HUANGJie2,DANGTongxin2(1 Unit94326ofPLA,Jinan250000;2.UniversityofInformationEngineering,Zhengzhou450001,China)Abstract:Inordertostudythewaveformselectionofradarseekerintheterminalguidanceandtrackingphase,thispaperproposesawaveformselectionalgorithmintheguidanceandtrackingprocessofcognitiveradarseeker.Firstly,weestablishtheprocessingflowofradarseekerwaveformselectionbycombiningtheseekerguidanceandobservationfilteringmodels;Secondly,weusetheinteractivemultiplemodelunscentedKalmanfilter(IMMUKF)algorithmtosolvethenonlineartrack⁃ingproblem.Weminimizetrackingerrorbysearchingforwaveformparametersbasedonthemaximummutualinformationcri⁃terion.Thesimulationresultsshowthatthewaveformselectionalgorithmcaneffectivelyimprovetheseekertrackingaccuracyandprovidestableguidanceoverload.Keywords:targettracking;cognitiveradar;seeker;waveformselection收稿日期:2022⁃09⁃01修回日期:2022⁃11⁃03作者简介:熊芳勇(1987 ),男,硕士研究生,研究方向为目标信息获取与处理㊂王建涛(1984 ),男,讲师㊂㊀㊀雷达导引头是重要的主动导引设备,具有精度高,全天候工作,发射后自动寻的能力㊂然而,战场环境的日益复杂及战场目标的机动性增强,对导弹末制导阶段的目标准确跟踪提出了严峻的挑战㊂一方面因为目标机动带来跟踪滤波模型上的不确定性增大,会大大降低导弹的跟踪精度,另一方面传统雷达导引头使用固定发射波形参数的工作模式在探测跟踪性能上的劣势日益凸显㊂认知雷达[1]是基于仿生学提出的一种先进的雷达体制,认知雷达通过获取环境和目标的信息反馈至雷达发射接收端形成闭环㊂文献[2⁃3]分别讨论了认知雷达技术的新进展和面向任务区分的认知雷达波形设计㊂其中面向跟踪任务的认知雷达波形选择方法能够显著提升雷达系统性能,已在大量的研究中获得验证[4⁃7],相比于采用固定发射波形的雷达系统能够减少跟踪误差,提升跟踪精度㊂Kershaw和Evans提出用波形参数估计的克拉美罗下界(Cramer⁃RaoLowerBound,CRLB)来近似波形的观测协方差,并在高斯模型的线性观测关系下依据Kalman滤波的递推关系,推导了在最大化互信息和最小均方误差准则下的波形参数闭式求解[8]㊂文献[9⁃11]借助于雷达分辨单元概念,考虑了联合检测跟踪任务中的最优检测门限与波形参数的选择㊂NguyenNH等研究了多基地雷达跟踪的波形选择方法[12],采用多传感器的集中式融合方法来预测多基地系统的滤波协方差,并依据最小化滤波协方差的迹为准则选择最优波形㊂以上研究针对固定雷达的跟踪波形选择问题展现出了性能优势,而目前对导引头跟踪的波形选择的研究较少㊂文献[13⁃14]研究了拦截器对一维直线匀速目标的拦截交会过程中的最优控制输入序列与波形选择问题㊂限定在固定的观测次数内拦截目标,通过Kalman滤波器来预测拦截器相对于目标位置和速度,使用CRLB近似波形的观测噪声㊂结合最优线性二次高斯控制器(LinearQuadraticGaussianController,LQG)和波形选择方法,实现了拦截器以最小代价成功拦截目标㊂以上针对拦截问题的跟踪波形选择,研究了以固定的观测次数拦截一维平面内的匀速运动目标,然而在实际的导引头三维制导跟踪场景[15]下,以上方法难以适用㊂因此考虑三维的制导跟踪场景,研究针对目标匀速运动和机动运动状态下的导引头跟踪波形选择具有一定的现实意义㊂考虑导引头制导过程是较为复杂的跟踪与控制复第4期指挥控制与仿真133㊀合问题[16⁃17],为便于讨论波形选择的性能优势,本文在设定导引头采用基于固定系数的比例导引律的前提下提出了一种末制导跟踪的波形选择模型㊂所做的主要工作是:在交互式多模型跟踪框架下提出了基于最大互信息准则的波形选择算法㊂1㊀系统模型1 1㊀导引头及目标模型导引头从空中发射跟踪拦截地面目标,为简化讨论,不考虑地球曲率的影响,导引头及目标均为质点模型,不考虑导引头质心运动的影响,k时刻北天东坐标系下的导引头状态为xm,k=[pxm,k,pym,k,pzm,k,vxm,k,vym,k,vzm,k]T,目标状态xt,k=[pxt,k,pyt,k,pzt,k,vxt,k,vyt,k,vzt,k]T㊂式中:p代表位置坐标值,v是速度值,(㊃)T是转置运算,下标m和t分别代表导引头和目标㊂1 2㊀导引头跟踪波形选择流程本文提出的导引头末制导跟踪波形选择的信息处理流程见图1㊂图1㊀雷达导引头目标跟踪波形选择Fig 1㊀Waveformselectionfortargettrackingofradarseeker㊀㊀首先,在k时刻导引头得到目标状态估计值^xk|k,一方面,根据^xk|k计算弹目视线角度和角速度信息,计算比例导引律约束下的k+1时刻导引头制导需用过载,按照导引头自身运动方程和过载,更新k+1时刻导引头的状态信息;另一方面,通过状态方程预测得到状态估计^xk+1|k和预测协方差Pk+1|k,通过波形选择算法,基于最大互信息准则选择最佳发射波形θoptk,并通过匹配滤波接收由目标反射的回波信号获取目标的时延多普勒参数估计,生成观测数据,经过跟踪数据处理获取下一时刻滤波状态估计^xk+1|k+1,完成整个闭环处理流程㊂1 3㊀观测及滤波模型k时刻的弹目相对状态即为系统跟踪状态xk=xt,k-xm,k=[pxk,pyk,pzk,vxk,vyk,vzk]T,则有状态转移过程:xk+1=f(xk)+wk(1)式中:f(㊃)是状态转移函数,wk是服从高斯分布的白噪声,噪声协方差为Qk,wk N(0,Qk)㊂对于匀速运动模型,可以得到状态值和协方差的一步预测:^xk+1|k=Fcv^xk|k(2)Pk+1|k=FcvPk|kFTcv+Qk(3)式中,Fcv是离散化的状态转移矩阵:Fcv=1Δt01éëêêùûúú⊗I3ˑ3(4)Qk=qΔt33Δt22Δt22Δtéëêêêêêùûúúúúú⊗I3ˑ3(5)其中,Δt是时间间隔,q是过程噪声强度㊂导引头的观测值为相对距离㊁距离率㊁方位角及俯仰角,则在k+1时刻的观测zk+1=[r,̇r,ϑ,ψ]T,观测方程为zk+1=h(xk+1)+v(θk)(6)其中,h(㊃)是非线性观测函数,对于各观测值有如下关系:㊀r=pxk+12+pyk+12+pzk+12̇r=(pxk+1vxk+1+pyk+1vyk+1+pzk+1vzk+1)pxk+12+pyk+12+pzk+12ϑ=arctan-pzk+1/pxk+1()ψ=arctanpyk+1/pxk+12+pyk+12()(7)v(θk)是波形参数为θk的观测噪声,波形参数是在k时刻选择并发射k+1时刻接收获得新的观测值,观测噪声服从高斯分布,即v(θk) N(0,R(θk)),对于高斯包络线性调频波形时,对于距离㊁速度的参数估计下界为134㊀熊芳勇,等:雷达导引头目标跟踪波形选择第45卷CRLB=2c2τ2η-4bτ2c2ηfc-4bτ2c2ηfc12π2τ2+8b2τ2æèçöø÷c2ηf2céëêêêêêêùûúúúúúú(8)其中,c是电磁波传播速度,fc是载频,τ是脉冲有效持续时间,b是波形调频带宽,η是信噪比,这里设定为与距离四次方成反比的量,即η=r0ræèçöø÷4,r0是参考距离,r是当前弹目距离㊂对于高斯包络波形脉冲宽度Ts=7 4338τ,调频斜率kt=bTs㊂对于角度的观测噪声与信噪比㊁波束宽度有关[18]:Rϑ=σ2ϑη(9)Rψ=σ2ψη(10)式中,σ2ϑ和σ2ψ是与波束宽度有关的常数,联合距离㊁速度㊁方位角㊁俯仰角的观测协方差为R(θk)=diag([CRLB,Rϑ,Rψ]),diag(㊃)是对角矩阵㊂1 4㊀导引头制导模型导引头运动状态可分解为俯仰面运动状态与水平面运动状态,获取弹目相对状态的估计值^xk+1|k+1后,分别计算两个制导平面需用的过载,更新下一时刻的导引头状态信息㊂k+1时^xk+1|k+1=[^pxk+1,^pyk+1,^pzk+1,^vxk+1,^vyk+1,^vzk+1]T,则计算两制导平面内的弹目运动视线角速度变化率为:̇ϑ=(^pzk+1^vxk+1-^pxk+1^vzk+1)(^pxk+12+^pzk+12)(11)̇ψ=[(^pxk+12+^pzk+12)^vyk+1-^pyk+1(^pxk+1^vxk+1+^pzk+1^vzk+1)](^pxk+12+^pyk+12+^pzk+12)^pxk+12+^pzk+12(12)则两制导平面的需用过载为:ny=ky^pxk+12+^pyk+12+^pzk+12̇ϑg(13)nz=kz^pxk+12+^pyk+12+^pzk+12̇ψg(14)式中,ky和kz分别是两个制导平面的比例导引常系数,g是引力加速度㊂导引头自身的运动俯仰角与偏航角为ϑm和ψm,则在过载ny和nz作用下,导引头俯仰角和偏航角角速度为:̇ϑm=gvm(ny-cosϑm)(15)̇ψm=-gvmcosϑmnz(16)其中,vm是导引头自身速度各分量的模,即vm=vxm,k+12+vym,k+12+vzm,k+12,㊂则在时间间隔Δt后,导引头运动俯仰角㊁偏航角更新为:ϑm=ϑm+̇ϑmΔt(17)ψm=ψm+̇ψmΔt(18)2㊀波形选择算法2 1㊀波形库组成导引头使用高斯包络线性调频波形库,设定波形参数脉冲宽度τ和调频带宽b,Θ={τ=[20ʒ2ʒ40]μs,b=[100ʒ100ʒ1000]KHz},则波形库包含11ˑ10=110种波形参数组合㊂2 2㊀波形选择准则函数考虑观测的非线性,使用无迹卡尔曼滤波(UKF)[19]处理跟踪过程㊂k时刻选择的波形是在k+1时刻被接收并获得观测值用于更新k+1时刻的状态^xk+1|k+1,因此在k时刻的波形选择过程中无法计算状态协方差Pk+1|k+1,波形选择是通过最小化预测的跟踪误差来实现,这里在波形选择阶段使用上一时刻最大概率的模型来进一步状态预测,同时通过预测信噪比,进行观测预测和更新得到预测的状态协方差^Pk+1|k+1,基于信息熵准则[20]的波形参数θoptk选择为θoptk=argminΓ,θɪΘdet(^Pk+1|k+1,θ)(19)其中,Γ是滤波器结构,det(㊃)是行列式㊂2 3㊀波形选择算法使用IMMUKF跟踪弹目相对状态㊂采取波形库搜索的方法,选择使得信息熵最小的波形参数θoptk㊂则综合制导跟踪和波形选择的流程见表1㊂表1㊀波形选择算法Tab 1㊀WaveformselectionalgorithmIMMUKF初始化:for(i,j=1,2)模型状态x(i)0|0,协方差P(i)0|0,模型概率μ(i)0,过程噪声Q(i)k,模型转移概率矩阵Π={pij}㊂第4期指挥控制与仿真135㊀1.由当前状态更新导引头运动信息及过载;2.模型交互输入:交互概率:μ(i)k|k-1=ð2j=1pjiμ(j)k-1,μj|ik-1=pjiμ(j)k-1/μ(i)k|k-1;交互状态: x(i)k|k==ð2j=1x(j)k|kμj|ik;交互协方差: P(i)k|k==ð2j=1μj|ik[P(j)k|k+Δ(i,j)k(Δ(i,j)k)T],式中Δ(i,j)k=x(i)k- x(j)k;3.模型预测:预测状态:x(i)k+1|k==Fcv x(i)k|k,预测协方差:P(i)k+1|k=Fcv P(i)k|kFTcv+Q(i)k4.波形选择:选择最大概率模型的索引:index=findmax[μ(i)k]^xk+1|k=x(index)k+1|k,Pk+1|k=P(index)k+1|kminCost=ɕ,θoptk=0foreveryθɪΘ㊀computePxzPzzR(θ)Pk|k(θ)㊀Cost=det(Pk|k(θ))㊀ifminCost>Cost㊀㊀minCost=Cost,θoptk=θ㊀endend5.波形发射,获得观测,模型状态㊁协方差更新,模型似然函数㊁概率更新,状态融合㊂x(i)k+1|k+1=x(i)k+1|k+Pxz(Pzz+R(θoptk))-1(zk-h(x(i)k+1|k));P(i)k+1|k+1=Pk+1|k-Pxz(Pzz+R(θoptk))-1PTxzΛ(i)k+1=N(zk-h(x(i)k+1|k);0,Pzz+R(θoptk));μ(i)k+1=μ(i)k+1|kΛ(i)k+1/ð2j=1μ(j)k+1|kΛ(j)k+1;xk+1|k+1=ð2j=1μ(j)k+1x(j)k+1|k+1;Pk+1|k+1=ð2j=1μjk+1[P(j)k|k+(x(i)k+1|k+1-xk+1|k+1)(x(i)k+1|k+1-xk+1|k+1)T]6.判断弹目距离是否小于设定值,是结束,否则返回1㊂㊀㊀㊀根据表1算法,首先在k时刻根据当前滤波状态计算导引头自身的运动状态和过载,用于k+1时刻更新;然后进行模型交互,选择最大概率的模型,根据过程更新得到当前的状态预测^xk+1|k和协方差Pk+1|k,计算预测信噪比和波形的预测观测协方差R(θk),再通过无迹变换(UnscentedTransformation,UT)近似计算预测滤波协方差^Pk+1|k+1,θ㊂比例采样产生sigma点集{χ0, ,2n}和对应权重{ω0, ,2n}:χ0=^xk|k-1,ω0=βi+βχi=^xk|k-1+((i+β)Pk|k-1)i,ωi=12(i+β)χn+i=^xk|k-1-((i+β)Pk|k-1)i,ωn+i=12(i+β)ìîíïïïïïïï(20)式中:nx是状态维数,i=0,1,2, ,2nx是sigma点集和权重的索引,β是调节采样点间距离的常数因子㊂通过观测函数传递sigma采样点,得到观测预测集Z={ Zi=h(χi)}i=0,1, ,2n,则状态预测均值和观测预测均值为χ=ð2ni=0ωiχi Z=ð2ni=0ωi Ziìîíïïïï(21)㊀㊀则状态观测互协方差和观测协方差为㊀㊀㊀Pxz=ð2ni=0ωi(χi- χ)( Zi- Z)TPzz=ð2ni=0ωi( Zi- Z)( Zi- Z)Tìîíïïïï(22)则对于参数θk的滤波协方差矩阵预测为^Pk|k,θʈPk|k-1-Pxz(Pzz+R(θk))-1PTxz(23)搜索波形库,得到最佳波形参数,发射波形,在k+1时刻得到真实的观测值,进行多模的状态更新并融合得到k+1时刻滤波的最终状态估计值与协方差估计,根据弹目相对距离是否达到设定的结束条件,完成整个算法过程㊂3㊀仿真验证3 1㊀仿真参数导引头跟踪过程仿真参数设置见表2㊂其中,r0是计算信噪比的参考距离,设定目标距离为50km时信噪比为0dB,Δt为跟踪时间间隔,比例导引系数为常数ky和kz,这里我们考虑用一个高强度的匀速运动模型来模拟未知的相对状态的机动过程,因此,多模型库由两个强度不同的匀速运动模型组成,过程噪声水平分别设置为q1和q2㊂作为对比,对两个固定波形的跟踪情况进行仿真,分别为波形θ1和θ2㊂136㊀熊芳勇,等:雷达导引头目标跟踪波形选择第45卷表2㊀仿真参数Tab 2㊀Simulationparameters㊀导引头跟踪弹目相对状态,这里取相对状态距离㊁速度的估计均方根误差作为主要评估指标㊂跟踪真实状态界定为误差评估的标准值xk,跟踪状态估计值为xk|k,分别对距离和速度求均方根误差:RRMSE(k)=1MðMi=1((px-^px)2+(py-^py)2+(pz-^pz)2)VRMSE(k)=1MðMi=1((vx-^vx)2+(vy-^vy)2+(vz-^vz)2)(24)其中,M是蒙特卡洛仿真次数,同时计算跟踪过程的平均均方跟踪误差为:ARRMSE=1LðLk=1RRMSE(k)AVRMSE=1LðLk=1VRMSE(k)(25)其中,L是观测的总次数㊂3 2㊀场景1:目标匀速直线运动导引头初始位置为[0,3000,0],速度为1000m/s,初始俯仰角ϑm及方位角ψm为0rad,重力加速度g=9 8m/s2㊂目标初始位置为[18136,0,9192 8],速度为15m/s,初始俯仰角ϑt为0rad,方位角ψt为π/3rad,目标匀速直线运动㊂目标匀速运动时导引头制导跟踪的轨迹见图2㊂图3是目标在匀速运动时,导引头在各种波形策略下跟踪时的两个制导平面的过载比较,可以发现,目标在匀速运动时,过载变化平稳,这与图2各种波形策略下导引头制导轨迹接近的结果相一致㊂表3是目标匀速时的各种波形策略下的制导跟踪平均均方根误差数据㊂从跟踪结果上看,采取波形选择的跟踪误差相比固定波形性能提升较为明显,距离跟踪精度相比波形1提升22 98%,比波形2提升9 24%,速度跟踪精度分别提升16 72%和2 97%㊂同时也可以发现,较大的时宽带宽参数能够比较小的时图2㊀导引头轨迹(匀速目标)Fig 2㊀Seekertrack(constantvelocitytarget)图3㊀过载(匀速目标)Fig 3㊀Overload(constantvelocitytarget)宽带宽参数波形提供好的分辨力,同时跟踪精度要好㊂表3㊀跟踪误差(匀速目标)Tab 3㊀Trackingerror(constantvelocitytarget)波形1波形2波形选择ARRMSE26 5963m22 5703m20 4837mAVRMSE2 1705m/s1 8631m/s1 8077m/s㊀整个制导跟踪过程的距离均方误差见图4,采取波形选择的导引头跟踪过程的误差收敛较快,随着弹目距离的减小,信噪比改善较大,各种波形策略下最后的跟踪距离误差趋于稳定且比较接近㊂图4㊀距离误差(匀速目标)Fig 4㊀Rangeerror(constantvelocitytarget)图5是速度跟踪误差的曲线,同样在远距离时采取波形选择的导引头速度跟踪优势明显,误差曲线收第4期指挥控制与仿真137㊀敛较快,后段虽然距离接近,但仍旧比固定波形跟踪精度高㊂图5㊀速度误差(匀速目标)Fig 5㊀Velocityerror(constantvelocitytarget)导引头在整个跟踪过程中选择了最大的脉冲宽度,跟踪调频带宽的选择是在最小带宽和最大带宽之间频繁变换,调频斜率不断变化,获取最佳的距离速度跟踪精度,图6是单次蒙特卡洛仿真的波形参数选择结果㊂图6㊀波形选择(匀速目标)Fig 6㊀Waveformselection(constantvelocitytarget)3 3㊀场景2:目标连续转弯机动导引头初始参数设置不变,目标初始位置为[18136,0,9192 8],速度为60m/s,初始俯仰角ϑt为0rad,方位角ψt为π/3rad,目标连续转弯机动时导引头跟踪轨迹见图7㊂当目标连续转弯机动时,导引头与目标的视线角度变化较快,因此,在比例导引律的约束下,导引头两个制导平面内的需用过载变化比较剧烈㊂图8和图9分别是目标机动下的导引头水平过载和纵向过载的变化曲线,可以看出,和目标匀速运动的情况下的过载相比较,随着目标机动水平的提升,导引头需用过载明显变大㊂另外,采取波形选择的导引头制导过程中两个制导平面内的需用过载变化趋势与使用固定波形的过载变化趋势大体相同,但是波形选择的过载变化相对平缓㊂图7㊀导引头轨迹(机动目标)Fig 7㊀Seekertrack(maneuveringtarget)图8㊀水平过载(机动目标)Fig 8㊀Horizontaloverload(maneuveringtarget)图9㊀纵向过载(机动目标)Fig 9㊀Longitudinaloverload(maneuveringtarget)目标机动转弯情况下,导引头跟踪的平均均方根误差数据见表4,波形选择相比于固定波形的跟踪精度提升较大㊂距离精度分别提升20 91%和9 44%,速度跟踪精度分别提升11 41%和9 32%㊂在目标转弯机动的情况下,交互式多模型跟踪误差相比目标匀速跟踪时变化不大,同时波形选择依然有效㊂表4㊀跟踪误差(机动目标)Tab 4㊀Trackingerror(maneuveringtarget)波形1波形2波形选择ARRMSE25 9802m22 6895m20 5475mAVRMSE2 6196m/s2 5592m/s2 3205m/s㊀138㊀熊芳勇,等:雷达导引头目标跟踪波形选择第45卷对整个制导跟踪过程的距离均方误差见图10,距离均方误差见图11,采取波形选择的导引头跟踪过程的误差收敛较快,随着弹目距离的接近,信噪比改善较大,各种波形策略下后段的跟踪距离误差趋于稳定,比较接近,且能够明显看出,在目标机动转弯时,跟踪误差曲线变化趋势较为一致,使用波形选择策略的跟踪误差始终维持在较高的精度㊂图10㊀距离误差(机动目标)Fig 10㊀Rangeerror(maneuveringtarget)图11㊀速度误差(机动目标)Fig 11㊀Velocityerror(maneuveringtarget)图12是机动目标的波形选择,导引头选择了最大的脉冲宽度,相比于匀速跟踪的过程,跟踪调频带宽的选择是在最小带宽和最大带宽之间变化更加频繁,这是因为目标的机动使得跟踪的不确定性增大㊂4㊀结束语从两个不同的目标运动场景的制导跟踪结果看,基于最大互信息准则的波形选择算法能够有效减小跟踪误差,同时在目标机动性较大时,相比于使用固定波形的制导跟踪的需用过载变化也较为平缓㊂这是因为,滤波协方差矩阵的信息熵,代表滤波状态误差的不确定度,信息熵越大,不确定性越大,通过使预测信息熵最小化来选择波形参数,能够获得较好的综合观测性能,并最终减少跟踪误差㊂本文选取的高斯包络线图12㊀波形选择(机动目标)Fig 12㊀Waveformselection(maneuveringtarget)性调频波形,波形测量的误差协方差存在时延和多普勒估计的相关项,尤其是在机动状态下,模型不确定性大,径向距离和径向速度的相关性较强,通过改变时宽脉宽波形参数(相当于调整线性调频的调频斜率),改变时延多普勒估计的相关项,使波形与跟踪状态相匹配,最终使得总体跟踪性能提升㊂两个仿真场景也说明了本文波形选择模型对于机动目标跟踪具有一定的鲁棒性和适应性㊂本文研究了空地导引头机动跟踪的波形选择问题,通过交互式多模型建立了有效的导引头跟踪模型,结合IMMUKF跟踪过程,提出了基于最大化互信息准则的波形选择算法,并在目标不同的运动场景下验证了所提波形选择算法的有效性,能够有效提升跟踪精度,并在目标机动时,使得制导过程的过载变化较为平稳,这说明了较为精确的跟踪结果能够反馈给制导系统更为准确的目标信息,最终影响制导的结果㊂参考文献:[1]㊀HAYKINS.Cognitiveradar:awayofthefuture[J].IEEESignalProcessingMagazine,2006,23(1):30⁃40.[2]㊀李响,杨德贵.认知雷达及其关键技术的研究进展分析[J].现代雷达,2022,44(3):1⁃9.LIX,YANGDG.Analysisofresearchadvanceoncogni⁃tiveradaranditskeytechnology[J].ModernRadar,2022,44(3):1⁃9.[3]㊀余若峰,杨威,付耀文,等.面向不同雷达任务的认知波形优化综述[J].电子学报,2022,50(3):726⁃752.YURF,YANGW,FUYW,etal.Areviewoncognitivewaveformoptimizationfordifferentradarmissions[J].ActaElectronicaSinica,2022,50(3):726⁃752.[4]㊀王鹏峥,李杨,张宁.环境感知信息辅助的认知雷达波形参数智能选择[J].信号处理,2021,37(2):186⁃198.WANGPZ,LIY,ZHANGN.Environmentsensingin⁃第4期指挥控制与仿真139㊀formationaidedwaveformparametersintelligentselectionforcognitiveradar[J].JournalofSignalProcessing,2021,37(2):186⁃198.[5]㊀张浩为,谢军伟,葛佳昂,等.基于波形调度的机动目标跟踪算法[J].电子学报,2019,47(3):560⁃567.ZHANGHW,XIEJW,GEJA,etal.Maneuveringtar⁃gettrackingbasedonwaveformscheduling[J].ActaElec⁃tronicaSinica,2019,47(3):560⁃567.[6]㊀WANGS,BID,LIJ,etal.JointdetectionandtrackingalgorithmforcognitiveradarbasedonparallelstructureofEKFandparticlefilter[J].IETRadar,Sonar&Naviga⁃tion,2019,13(11):1990⁃1997.[7]㊀WANGS,BID,RUANH,etal.Cognitivestructurea⁃daptiveparticlefilterforradarmanoeuvringtargettracking[J].IETRadar,Sonar&Navigation,2019,13(1):23⁃30.[8]㊀KERSHAWDJ,EVANSRJ.Optimalwaveformselectionfortrackingsystems[J].IEEETransactionsonInformationTheory,1994,40(5):1536⁃1550.[9]㊀SIRASP,LIY,PAPANDREOU⁃SUPPAPPOLAA,etal.Waveform⁃agilesensingfortracking[J].IEEESignalProcessingMagazine,2009,26(1):53⁃64.[10]王建涛.面向参数估计的认知雷达自适应发射波形优化技术研究[D].长沙:国防科学技术大学,2014.WANGJT.Adaptivewaveformoptimizationforcognitiveradarparameterestimation[D].Changsha:NationalUni⁃versityofDefenseTechnology,2014.[11]WANGJT,QINYL,WANGHQ,etal.Dynamicwave⁃formselectionformanoeuveringtargettrackinginclutter[J].IETRadar,SonarandNavigation,2013,7(7):815⁃825.[12]N.NH,K.D,L.MD.Adaptivewaveformselectionformultistatictargettracking[J].IEEETransactionsonAero⁃spaceandElectronicSystems,2015,51(1):688⁃701.[13]BALLERIA,FARINAA,BENAVOLIA.Coordinationofoptimalguidancelawandadaptiveradiatedwaveformforinterceptionandrendezvousproblems[J].IETRadar,So⁃nar&Navigation,2017,11(7):1132⁃1139.[14]BENAVOLIA,BALLERIA,FARINAA.JointWaveformandGuidanceControlOptimizationforTargetRendezvous[J].IEEETransactionsonSignalProcessing,2019,67(16):4357⁃4369.[15]吕梅柏,赵小锋,刘广哲.空中大机动目标跟踪算法研究[J].现代防御技术,2018,46(2):45⁃50,172.LYUMB,ZHAOXF,LIUGZ.Aerialhighmaneuveringtargettrackingalgorithm[J].ModernDefenseTechnology,2018,46(2):45⁃50,172.[16]董志荣.求目标运动参数的新原理[J].舰船科学技术,1984,5(1):60⁃67.DONGZR.Anewprincipleforcalculatingtargetmotionparameters[J].ShipScienceandTechnology,1984,5(1):60⁃67.[17]董志荣.论指挥控制系统的发展⁃过去㊁现在和未来[J].舰船科学技术,1995,16(2):3⁃10.DONGZR.Developmentofcommandandcontrolsystem:past,presentandfuture[J].ShipScienceandTechnology,1995,16(2):3⁃10.[18]SKOLNIKMI.Radar[J].ReferenceDataforEngineers(NinthEdition),2002:31⁃36.[19]WANE,MERWER,NELSONAT.Dualestimationandtheunscentedtransformation[J].AdvancesinNeuralIn⁃formationProcessingSystems,2000(12):666⁃672.[20]王树亮.认知雷达跟踪理论及关键技术研究[D].长沙:国防科技大学,2019.WANGSL.Researchontheoryandkeytechnologiesofcognitiveradartracking[D].Changsha:NationalUniversityofDefenseTechnology,2019.[21]SiraSP.Waveform⁃agilesensingfortargettrackinganddetectioninclutter.[D].Phoenix:ArizonaStateUniversi⁃ty,2007.(责任编辑:李楠)。
雷达导引头 第1章
图1-5 半主动寻的制导示意图
1.2 寻的制导体制
3.被动寻的制导 被动寻的制导系统是利用目标的辐射信号工作的。导弹上的接 收装置接收目标的辐射信号,从中提取角度信息,并由弹上计算机形 成控制信号,操纵导弹飞向目标。 图1-6是被动寻的制导示意图。
图1-6 被动寻的制导示意图
1.2 寻的制导体制
导引头分类
图1-10 被动/主动复合导引头的简化框图
1.3
弹上制导计算机装定被动模式探测 天线的指向,其宽波束足以在远距 离上覆盖被攻击目标,信号分选系 统借助目标雷达信号的先验信息( 如载频、重复频率、脉冲宽度等) 和制导系统提供的目标分布域的张 角信息,从进入被动天线的众多信 号中选择并锁定目标雷达信号,提 取目标的角度信息,实施角跟踪。 在被动模式角跟踪过程中,联动主 动天线使其指向目标,当目标进入 主动模式的探测距离范围时,主动 模式检测识别目标,并进行距离、 速度和视线角速度测量,获取精确 制导信息。
1.1 寻的制导原理
寻的制导系统的跟踪原理可由导弹-目标运动方程组和 制约导弹运动的导引方程来描述。为了简化分析,设 导弹与目标在同一铅垂面 内运动,其相 对位置和运 动关系通常用 极坐标系表示, 如图1-2所示。
拨开迷雾的双手——雷达引导投弹回顾

( i t at snA B)附近的投弹练习 Wr h —P t ro F g e
轰炸 。 这些场站对于
手能清楚地看到这 口泡菜桶的位置. 而且还 不能有敌人防空火力的干扰 这些要求对 于
石油以及火箭制造基地而采取太规模的轰炸 时 .传 统的投弹瞄准方j 击不仅使轰炸效率 低, 而且还损失 了大量的轰炸机。战后统计 资料显示 . 在历时 5 年的对德 轰炸 中.为了 达到战略战役 目的 英美共联 合进 行了4 4 4
_
漤 女 ・ L8 L 1TR 6o R . H V MI 1
维普资讯
口胡 琪 张学辉 刘光耀 , 文
虽然有人在平时的训练中能够借助性能 优越的 “ 诺登 瞄准具把炸弹从高空准确地 投入一 口泡菜桶 . 但在瞬息万变的战场上难
标 , 且 附带 毁 伤 也翅 而 残 酷 依 然 带 给 人 类 无, I
和 泰国部署 6 个被称作 。 天空侦察点 (k Sy so)的雷达 引导站 ,装备 MS 一7 pt Q 7型雷
达 。 些 引 导 站 的 工 作 覆 盖 范 围 包 括 越 南 南 这
方 、柬埔寨东部 、老 挝 南部 和 越 南 北 方
说 ,B一 5 S还 是 猴 子 和 2 牙 签 制 造 商 的终 结 者 。 B
一
巧、隐形 , 而其携带的 以 自动识 别 、 位 目标 定 统。目前美 国空军的 B
世 界 一 流 产 品 ,可 就 2。 灵 式 隐形 轰炸 精 美军 又 已经在 莱 特 一巾 f 计 下 一 代 隐 形 轰炸 机 I
免会受到云雾、 季风和敌方防空火力的干扰
雷达导引头处理流程
雷达导引头处理流程英文回答:Radar Seeker Processing Flow.The radar seeker is a critical component of a radar-guided missile, responsible for receiving and processing radar signals to guide the missile towards its target. The processing flow of a radar seeker typically involves the following steps:1. Signal Reception: The seeker antenna receives radar signals emitted by the target. These signals are typically in the microwave frequency range and carry information about the target's position, velocity, and other characteristics.2. Signal Amplification: The received signals are often weak and need to be amplified to a level where they can be processed effectively. This is done using a low-noiseamplifier (LNA).3. Filtering: The amplified signals may contain noise and unwanted signals from other sources. Filtering is used to remove these unwanted signals and enhance the target signal. This is typically done using a bank of filters tuned to specific frequencies or frequency bands.4. Down-Conversion: The filtered signals are down-converted to a lower intermediate frequency (IF) using a mixer. This process shifts the signals to a frequency range that is more suitable for further processing.5. Pulse Compression: Pulse compression techniques are used to increase the signal-to-noise ratio (SNR) and improve the range resolution of the seeker. This is done by transmitting a series of short, high-energy pulses and then correlating the received pulses to recover the original signal.6. Target Detection: The processed signals are analyzed to detect the presence of a target. This is done using avariety of signal processing techniques, including matched filtering, constant false alarm rate (CFAR) detection, and moving target indication (MTI).7. Target Tracking: Once a target is detected, the seeker continues to track its position and velocity over time. This is done using Kalman filtering or other tracking algorithms.8. Guidance Law Computation: Based on the target's position and velocity, the seeker computes the required guidance commands to steer the missile towards the target. These commands are sent to the missile's control surfaces or thrusters.9. Missile Control: The guidance commands from the seeker are used to control the missile's flight path and maneuver it towards the target. This is done through the missile's autopilot or other control systems.The radar seeker processing flow is a complex and highly sophisticated process that enables radar-guidedmissiles to accurately and effectively engage their targets.中文回答:雷达导引头处理流程。
共形相控阵雷达导引头技术研究_丁武伟
檻檻檻檻檻殤
檻檻檻檻檻殤
檻檻檻檻檻檻檻檻檻檻檻檻檻檻檻檻檻檻檻檻檻檻檻檻檻檻檻檻檻檻檻檻檻檻檻檻檻檻檻檻檻檻殤
共形相控阵雷达导引头技术研究
檻檻檻檻檻檻檻檻檻檻檻檻檻檻檻檻檻檻檻檻檻檻檻檻檻檻檻檻檻檻檻檻檻檻檻檻檻檻檻檻檻檻殤
丁武伟 穆仕博 谢光辉
摘 要 介绍了国外相控阵雷 达导引头技术的发展现状,探讨了共 形相控阵雷达导引头的工作原理和系 统方案,指出了实现共形相控阵雷达 导引头的关键技术与实现途径。
典型 的 有 源 相 控 阵,一 个 T / R 组件对应一个辐射单元,对 于一般的系统而言,辐射单元数 都在成百上千个左右,这样庞大 的数量只有在地面、舰载或机载 等空间较大的平台上才能解决体 积、结构、安装以及散热等工程 问题。微波集成电路技术、特别 是多层 立 体 电 路 技 术 ( 如 LTCC 技术) 、多芯片模块 MCM 技术的 发展,是实现小型化相控阵系统 在空空导弹弹载条件下应用的技 术途径之一。图 7 是集成了移相 器、放大器、开关和增益控制电 路的多功能单芯片收发组件和采 用 SiGe 技术的低成本移相器[4]。 3. 4 波束形成网络
2 共形相控阵雷达导引头 2. 1 功能
共形相控阵雷达导引头采用 先进的雷达波形设计技术,实现 快速精确的测速、测距、测角以 及目标识别,可与导弹飞行控制 组件一起实现对目标在速度、距 离和角度上的搜索、探测、截获 和跟踪,并连续测量目标视线角 运动参数及相对速度参数,传给 飞行控制组件,完成导弹的末段 制导。容易实现制导引信一体化 功能,为引信提供方位、距离和 速度等弹目交会信息,以完成引 信的最佳起爆。共形相控阵雷达 导引头的的另一优点是天线波束 的快速扫描和天线波束形状的快 速变化能力; 可进行空间定向和 滤波; 可完成空间功率合成,大 大提高了探测与跟踪能力。满足 未来 空 战 对 攻 击 高 速、大 机 动 ( 典型值在 20 g 以上) 目标和超 声速巡航导弹的要求。 2. 2 系统方案
雷达导引头概论

雷达导引头概论雷达导引头是一种用于导航和制导系统中的重要装置,它通过接收和处理回波信号来确定目标的位置和运动状态,并根据预先设定的算法来指导导弹或其他飞行器对目标进行打击或追踪。
本文将从雷达导引头的原理、应用领域、发展历程以及未来展望等方面进行介绍,以便读者能够全面了解雷达导引头的概论。
一、雷达导引头的原理雷达导引头主要依靠雷达技术来实现目标探测和跟踪。
雷达系统通过发射一束电磁波并接收目标回波来获取目标的位置和速度信息。
雷达导引头通过接收回波信号并进行信号处理,可以确定目标的位置、速度和加速度等关键参数。
同时,根据导弹或飞行器的运动状态和预设的飞行轨迹,雷达导引头可以计算出导弹需要调整的航向和俯仰角等参数,从而实现对目标的精确打击或追踪。
二、雷达导引头的应用领域雷达导引头广泛应用于军事导弹、反导系统、火箭弹、导弹防御系统等领域。
在军事领域,雷达导引头是制导武器的核心技术之一,能够提供高精度的目标跟踪和打击能力,有效提高了武器系统的作战效能。
此外,雷达导引头还被应用于民用领域,如航天、航空、船舶等领域,用于导航、探测和遥感等方面。
三、雷达导引头的发展历程雷达导引头的发展可以追溯到二战时期。
当时的雷达导引头主要是机械扫描雷达,其工作原理是通过旋转天线来扫描目标,并将回波信号传输给导弹进行处理。
随着电子技术的发展,雷达导引头逐渐采用电子扫描技术,提高了目标探测和跟踪的精度和速度。
近年来,随着微波技术和信号处理技术的进步,雷达导引头的性能得到了进一步提升,能够应对更加复杂的作战环境和目标干扰。
四、雷达导引头的未来展望随着人工智能和机器学习等技术的发展,雷达导引头有望实现更加智能化和自主化。
传统的雷达导引头主要依靠预设的算法来进行目标跟踪和打击,但在复杂的电磁环境和目标干扰下,往往会出现误判或失效的情况。
未来的雷达导引头可以通过学习和适应能力来提高自身的性能,能够根据实时的环境和目标条件来进行决策和调整,从而提高导弹的打击精度和生存能力。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1.2 寻的制导体制
4.复合寻的制导 除了单一体制的主动、半主动和被动寻的制导外,还可以将它 们组合成复合寻的制导系统,如被动/主动复合制导系统和半主动/ 主动复合制导系统等。
1.3
导引头分类
依据信息载体的不同形式,导引头可分为雷达导引头、红外导 引头、激光导 引头等类型。 在雷达导引头中,目标信息以无线电波为载体。 相应于寻的制导体制, 雷达导引头可分为主动导引头、半主动 导引头、被动导引头和复合导引头。
1.3
4. 复合导引头 如前所述,单一体制的主 动、半主动和被动导引头 可以组合成复合导引头。 被动/主动复合导引头和半 主动/主动复合导引头是两 种常用的复合导引头。 1)被动/主动复合导引头 图1-10为被动/主动复 合导引头的简化框图,它 由被动寻的模式与主动寻 的模式复合而成,共用一 个伺服系统。
θ M为导弹速 线的夹角;
度矢量与基准线的夹角; 为目标速度矢量与基
θ 准线的夹角。 T
,φ
q 、θ M 、 θT 三个角度均以基准线为参照,逆时针旋转为正值。另外
M
置角。
、φT 分别为导弹速度矢量、目标速度矢量与视线的夹角,称为前
1.1 寻的制导原理
由图1-2可以列出导弹-目标运动方程:
dRMT ( t ) = −vM ( t ) cos φM ( t ) + vT ( t ) cos φT ( t ) dt R t dq ( t ) = −vM ( t ) sin φM ( t ) + vT ( t ) sin φT ( t ) MT ( ) dt θM (t ) − q (t ) φ= M (t ) θT ( t ) − q ( t ) T (t ) φ=
图1-8 半主动导引头的简化框图
1.3
导引头分类
图1-8 半主动导引头的简化框图 直波天线和直波接收机接收并处理来自照射器的直波信号,从中提取 相参基准。回波天线和回波接收机接收并处理目标散射的回波信号。相参 处理器对基准信号和回波信号做相参处理,获取多普勒信息。信息处理机 在进行频域跟踪的基础上,通过伺服系统对目标实施角跟踪,提取目标的 角信息。由于导引头中不包含发射设备,导引头不具备自主探测能力,故 称其为半主动导引头。 连续波半主动导引头、间断连续波半主动导引头是两种常见的半主动 导引头。无直波半主动导引头和逆单脉冲半主动导引头是开发中的两种新 型半主动导引头。
dq ( t ) uk ( t ) = ku N vr ( t ) dt
(1-6)
式中: ku 为电压转换系数。
1.1 寻的制导原理
导弹驾驶仪中的加速度计测得导弹的横向加速度,相应的电压值为 u aM ( t ) = k u a M ( t ) (1-7) 式中的 ku系数应与式(1-6)中的电压转换系数相同。 比例导引系统的基本 结构如图1-3所示,该系统 中的雷达导引头包含了指 令形成功能,也可以将此 功能纳入制导计算机。 制导过程中,自动驾驶仪提 取的误差信号为 u= uk ( t ) − uaM ( t ) (1-8) e (t ) 由误差信号控制驾驶仪的 图1-3 比例导引系统的基本结构 执行机构,操纵导弹飞向目标。
1.2 寻的制导体制
1.主动寻的制导 在主动寻的制导系统中,弹载探测设备装有发射和接收装置,发射装置朝 目标方向发射信号,接收装置接收目标的反射信号,从中获取目标信息, 并由弹上计算机形成控制信号,操纵导弹飞向目标。图1-4是主动寻的制 导示意图。
图1-4 主动寻的制导示意图 主动寻的制导不需要导弹以外的其他设备参与制导,具有发射后不管 或交班后不管的自主制导能力。然而,正因为主动探测设备必须自行发射 信号,使导弹处于有源工作状态,易被敌方反辐射武器侦察和攻击。
(1-1)
1.1 寻的制导原理
导弹的运动参数 、 由导引方程约束,采用不同的 约束方程,可获得不同的导引规律。比如采用比例导引 规律时,导弹的速度矢量的转动速率 dθ M ( t ) / dt 比例于 视线角速率 dq ( t ) / dt ,即
dθ M ( t ) dq ( t ) = kg dt dt
图1-5 半主动寻的制导示意图
1.2 寻的制导体制
3.被动寻的制导 被动寻的制导系统是利用目标的辐射信号工作的。导弹上的接 收装置接收目标的辐射信号,从中提取角度信息,并由弹上计算机形 成控制信号,操纵导弹飞向目标。 图1-6是被动寻的制导示意图。
图1-6 被动寻的制导示意图
1.2 寻的制导体制
雷达导引头
沈阳航空航天大学 刘昕
第1章 概述
1.1 寻的制导原理
1.2 寻的制导体制
1.3 导引头分类
概述
雷达导引头又称无线电寻的器,它是一种安装在导 弹头部的探测装置,是无线电寻的制导系统的关键设备。 所谓制导就是控制导弹以一定的规律接近并摧毁目 标。不同于指令制导、驾束制导、惯性制导和导航制导, 寻的制导是利用弹上探测装置发现目标,测量目标相对 于导弹的位置参数和运动参数,形成控制指令,操纵导 弹飞向目标的一种制导方式。 本章介绍寻的导弹的制导原理、制导体制和导引头 分类。
为了改善弹道特性,通常采用修正比例导引。为了使弹道具 有单值性,比例导引系数应为 (1-4) 式中: N 为有效导航比;vr ( t ) 为径向速度,又称接近速度。 将式(1-3)和式(1-4)代入式(1-2),可得修正比例导 引方程:
dq ( t ) aM ( t ) = N vr ( t ) dt
1.2 寻的制导体制
2.半主动寻的制导 半主动寻的制导系统的照射器安装在地面、舰艇或飞行器上。制导过 程中,照射器朝目标方向发射信号,导弹上的接收装置接收目标的散 射信号,提取目标信息,并由弹上计算机形成控制信号,操纵导弹飞 向目标。图1-5是半主动寻的制导示意图。 就武器系统而言,半主动寻的制 导系统仍然是一个自主制导系统,只 是将发射与接收设备分离配置而己。 但是导弹上的接收装置却处于非自主 工作状态,必须依赖照射器对目标的 照射,才能获取目标回波,得到目标 信息,故称其为半主动探测装置。 半 主动制导过程中,照射器必须持续不 断地朝目标方向发射信号。显然,照 射器易受反辐射武器的攻击。
kg = N vM ( t ) vr ( t )
(1-5)
1.1 寻的制导原理
(1-5) 为了实现修正比例导引,除了实时测量dq ( t ) / dt 和 vM ( t ) 值 外,还需提取 信息。尽管修正比例导引一般不需要距 离信息,但是为了进一步改善制导性能,应在不同的导弹目标距离上,适当调整有效导航比。在这种情况下,提取距 离信息仍然是必要的。制导信息 、 vr ( t ) 和 RMT ( t ) 由 导引头测量,并由指令形成电路给出指令电压
被动寻的制导系统中,导弹本身不发射信号,处于隐蔽工作状 态。文献[2]列出了被动寻的体制的三种模式:反辐射寻的(ARH)模 式、基于干扰的寻的(HOJ)模式和辐射计测量寻的模式。 (1)反辐射寻的模式可用于空地导弹、空空导弹或地空导弹, 攻击 敌方雷达。 (2)基于干扰的寻的模式是弹载主动探测设备或半主动探测设备兼 备的探测瞄准式自卫干扰源的寻的方式。 (3)辐射计测量寻的模式是利用目标固有的热辐射探测目标,可作 为攻击地面目标的亳米波导引头的一种末端探测模式。 本书阐述的被动寻的制导系统是反辐射寻的模式,它依赖于目 标的辐射信号,一旦目标停止辐射,反辐射寻的制导系统将失去制 导能力。
导引头分类
图1-7 主动导引头的简化框图
脉冲主动导引头、准连续波主动 导引头和脉沖多普勒主动导引头 是三种常见的主动导引头。相控 阵导引头和合成孔径导引头是两 种尚在开发中的主动导引头。
1.3
导引头分类
2.半主动导引头 半主动寻的制导系统中,载体信号来自制导站的照射器,导引 头接收机的接收信号为目标对照射信号的散射波。 半主动导引头由直波天线、直波接收机、回波天线、回波接收 机、相参处理器、信息处理机和伺服系统组成,图1-8是其简化框图 。
1.2 寻的制导体制
在寻的制导系统中,弹载探测设备是一个时空信号处 理器,它的任务是检测目标、跟踪滤波和提取目标信息。 弹载探测设备的首要任务是从复杂的杂波和干扰背景中检 测目标散射或辐射的信号,从中提取目标相对于导弹的位 置参数和运动参数,获取制导信息。根据弹体信号的不同 来源,寻的制导系统可分为主动寻的制导、半主动寻的制 导、被动寻的制导和复合寻的制导。
导引头分类
图1-10 被动/主动复合导引头的简化框图
1.3
弹上制导计算机装定被动模式探测 天线的指向,其宽波束足以在远距 离上覆盖被攻击目标,信号分选系 统借助目标雷达信号的先验信息( 如载频、重复频率、脉冲宽度等) 和制导系统提供的目标分布域的张 角信息,从进入被动天线的众多信 号中选择并锁定目标雷达信号,提 取目标的角度信息,实施角跟踪。 在被动模式角跟踪过程中,联动主 动天线使其指向目标,当目标进入 主动模式的探测距离范围时,主动 模式检测识别目标,并进行距离、 速度和视线角速度测量,获取精确 制导系统的弹上设备由导引头(探测装置)、自动驾驶 仪(控制设备)与弹体(控制对象)组成。如图1-1所示。
图1-1 寻的制导系统的弹上设备
在寻的制导阶段,导引头发现并跟踪目标,提取目标相 对于导弹的位置和运动信息,弹上计算机利用目标信息形成 控制信号控制自动驾驶仪,改变导弹的飞行姿态。飞行过程 中,导引头实时更新目标信息,弹上计算机不断产生新的控 制信号控制导弹飞行,直至接近并摧毁目标。
1.3
1.主动导引头 主动导引头是一部弹载雷达装 置。 主动导引头由天线、发射 机、接收机、信息处理机和伺 服系统组成,图1-7是其简化 框图。发射机产生载体信号照 射目标,接收机接收目标反射 的回波信号,信息处理机提取 目标信息,伺服系统控制天线 实现角预定、角稳定和角跟踪 。主动导引头收发兼备,是一 部完整的弹载雷达。
(1-2)
式中, k g为比例导引系数。通常, dq ( t ) / dt 由导引头提 取,而 测量,即 由导弹自动驾驶仪中的加速度计间接