基于51单片机及DS18B20温度传感器的数字温度计程序(详细注释)
基于51单片机的18B20温度计C程序
本程序为本人用单片机80c51与18b20做实验时写的,其中有些是汉语拼音,便于咱们中国同胞们理解.仅供参考#include <reg52.h>#define uint unsigned int#define uchar unsigned charuchar tab[]="0123456789WD:C";sbit ds=P2^6;sbit rs=P3^4;sbit rw=P3^5;sbit en=P3^6;uchar s,g,shu;/***延时2tus***/yanshi(uchar t){while(--t){;}}/***延时tms** */delay(uint t){uchar a,b;for(a=t;a>0;a--)for(b=110;b>0;b--);}/***18B20初始化***/chushi(){ds=0;yanshi(250); //延时500usds=1;yanshi(2);}/***等待应答***/yingda(){while(ds);while(~ds);yanshi(2);}/***写一个字节***/w_dat(uchar dat){uchar i;for(i=0;i<8;i++){dat=dat>>1;ds=0;yanshi(8);ds=CY;yanshi(30);ds=1;}}/***读一个字节***/ uchar du_dat(){uchar i,dat;for(i=0;i<8;i++){ dat=dat>>1;ds=0;yanshi(1);ds=1;if(ds==1){dat=dat|0x80;}yanshi(30);}return dat;}/***启动温度转换***/ zhuanhuan(){chushi();yingda();delay(1);w_dat(0xcc);w_dat(0x44);}/***读取温度***/uchar du_wendu(){uchar a,b,dat;chushi();yingda();delay(1);w_dat(0xcc);w_dat(0xbe);a=du_dat(); //低位字节;b=du_dat(); //高位字节;dat=(b<<4)|(a>>4);return dat;}////////////////////////////// 1602液晶/////////////////////////////w_ml(uchar com){rs=0;P0=com;delay(5);en=1;delay(5);en=0;}chushihua(){rw=0;en=0;w_ml(0x38);w_ml(0x0c);w_ml(0x06);w_ml(0x01); }w_1602(uchar date){rs=1;P0=date;delay(5);en=1;delay(5);en=0;}xianshi(){w_ml(0x80);w_1602(tab[10]);w_1602(tab[11]);w_1602(tab[12]);w_1602(tab[s]);w_1602(tab[g]);w_1602(tab[13]);}/***************//** 主函数**//**************/main(){chushihua();while(1){delay(1);zhuanhuan();delay(10);shu=du_wendu();s=shu/10;g=shu%10;xianshi();}}。
基于51单片机的温度监测系统(DS18B20)
DS18B20读时序
所有的读时隙都由拉低总线,持续至少1us后再释放总线(由于上拉电阻的作用,总线恢复为 高
配置寄存器
8 位 CRC 生成器
DS18B20的时序
DS18B20复位时序
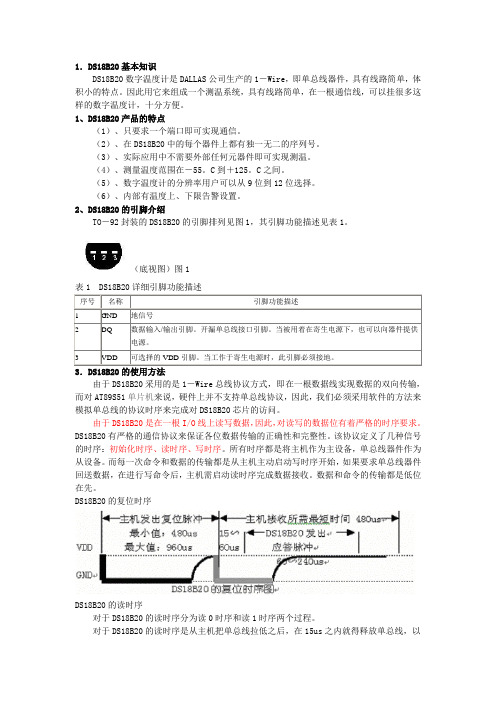
DS18B20的所有通信都由由复位脉冲组成的初始化序列开始。该初始化序列由主 机发出,后跟由DS18B20发出的存在脉冲(presence pulse)。在初始化步骤中,总线 上的主机通过拉低单总线至少480μs来产生复位脉冲。然后总线主机释放总线并进入接收 模式。当总线释放后,5kΩ的上拉电阻把单总线上的电平拉回高电平。当DS18B20检测 到上升沿后等待15到60us,发出存在脉冲,拉低总线60-240us至此,初始化和存在时序 完毕。时序图如下:
1.主控制器电路和测温
电路的设计
主控制器电路由AT89S52 及外围时钟和复位电路构成, 测温电路由DS18B20、报警 电路组成。AT89C52是此硬 件电路设计的核心,通过 AT89S52的管脚P2.7与 DS18B20相连,控制温度的 读出和显示。硬件电路的功 能都是与软件编程相结合而 实现的。具体电路原理图如 右图2所示。
送1,以拉低总线的方式表示发送0.当发送0的时候,DS18B20在读时隙的末期将会释放总线,总线
将会被上拉电阻拉回高电平(也是总线空闲的状态)。DS18B20输出的数据在下降沿(下降沿产 生读时隙)产生后15us后有效。因此,主机释放总线和采样总线等动作要在15μs内完成。
DS18B20数字温度计使用与C51程序
1.DS18B20基本知识DS18B20数字温度计是DALLAS公司生产的1-Wire,即单总线器件,具有线路简单,体积小的特点。
因此用它来组成一个测温系统,具有线路简单,在一根通信线,可以挂很多这样的数字温度计,十分方便。
1、DS18B20产品的特点(1)、只要求一个端口即可实现通信。
(2)、在DS18B20中的每个器件上都有独一无二的序列号。
(3)、实际应用中不需要外部任何元器件即可实现测温。
(4)、测量温度范围在-55。
C到+125。
C之间。
(5)、数字温度计的分辨率用户可以从9位到12位选择。
(6)、内部有温度上、下限告警设置。
2、DS18B20的引脚介绍TO-92封装的DS18B20的引脚排列见图1,其引脚功能描述见表1。
(底视图)图1表1 DS18B20详细引脚功能描述3.DS18B20的使用方法由于DS18B20采用的是1-Wire总线协议方式,即在一根数据线实现数据的双向传输,而对AT89S51单片机来说,硬件上并不支持单总线协议,因此,我们必须采用软件的方法来模拟单总线的协议时序来完成对DS18B20芯片的访问。
由于DS18B20是在一根I/O线上读写数据,因此,对读写的数据位有着严格的时序要求。
DS18B20有严格的通信协议来保证各位数据传输的正确性和完整性。
该协议定义了几种信号的时序:初始化时序、读时序、写时序。
所有时序都是将主机作为主设备,单总线器件作为从设备。
而每一次命令和数据的传输都是从主机主动启动写时序开始,如果要求单总线器件回送数据,在进行写命令后,主机需启动读时序完成数据接收。
数据和命令的传输都是低位在先。
DS18B20的复位时序DS18B20的读时序对于DS18B20的读时序分为读0时序和读1时序两个过程。
对于DS18B20的读时序是从主机把单总线拉低之后,在15us之内就得释放单总线,以让DS18B20把数据传输到单总线上。
DS18B20在完成一个读时序过程,至少需要60us才能完成。
基于51单片机和DS18B20的数字温度计设计

题目:基于89C51和DS18B20的数字温度计设计一、设计要求数字式温度计要求测温范围为-55~125°C,精度误差在0.1°C以内,LED 数码管直读显示。
二、方案论证根据系统的设计要求,选择DS18B20作为本系统的温度传感器,选择单片机AT89C51为测控系统的核心来完成数据采集、处理、显示、报警等功能。
选用数字温度传感器DS18B20,省却了采样/保持电路、运放、数/模转换电路以及进行长距离传输时的串/并转换电路,简化了电路,缩短了系统的工作时间,降低了系统的硬件成本。
该系统的总体设计思路如下:温度传感器DS18B20把所测得的温度发送到AT89C51单片机上,经过51单片机处理,将把温度在显示电路上显示,本系统显示器用4位共阳LED数码管以动态扫描法实现。
检测范围-55摄氏度到125摄氏度。
按照系统设计功能的要求,确定系统由3个模块组成:主控制器、测温电路和显示电路。
数字温度计总体电路结构框图如图1所示。
图1 数字温度计总体电路结构框图三、系统硬件电路的设计温度计电路设计原理图如图2所示,控制器使用单片机AT89C51,温度传感器使用DS18B20,用4位共阳LED数码管实现温度显示。
图2 数字温度计设计电路原理图1、主控制器AT89C51是一种带4K字节闪烁可编程可擦除只读存储器的低电压,高性能CMOS8位微处理器。
该器件采用ATMEL高密度非易失存储器制造技术制造,与工业标准的MCS-51指令集和输出管脚相兼容。
由于将多功能8位CPU和闪烁存储器组合在单个芯片中,ATMEL的AT89C51是一种高效微控制器,为很多嵌入式控制系统提供了一种灵活性高且价廉的方案。
2、显示电路显示电路采用4位共阳LED数码管,从P0口输出段码,列扫描用P3.0~P3.3口来实现,列驱动用8550三极管。
3、温度传感器工作原理DS18B20温度传感器是美国DALLAS半导体公司最新推出的一种改进型智能温度传感器,与传统的热敏电阻等测温元件相比,它能直接读出被测温度,并且可根据实际要求通过简单的编程实现9~12位的数字值读数方式。
51单片机Ds18b20温度传感器程序

* 实验名 : 18B20温度显示试验* 实验说明 : 数码管显示温度值,并且将温度值通过串口发送到电脑上。
* 连接方式 : 见连接图temp.h#ifndef __TEMP_H_#define __TEMP_H_#include<reg51.h>//---重定义关键词---//#ifndef uchar#define uchar unsigned char#endif#ifndef uint#define uint unsigned int#endif//--定义使用的IO口--//sbit DSPORT=P3^7;//--声明全局函数--//void Delay1ms(uint );uchar Ds18b20Init();void Ds18b20WriteByte(uchar com);uchar Ds18b20ReadByte();void Ds18b20ChangTemp();void Ds18b20ReadTempCom();int Ds18b20ReadTemp();#endiftemp.c#include"temp.h"/******************************************************************************** 函数名: Delay1ms* 函数功能: 延时函数* 输入: 无* 输出: 无*******************************************************************************/void Delay1ms(uint y){uint x;for( ; y>0; y--){for(x=110; x>0; x--);}}/******************************************************************************** 函数名: Ds18b20Init* 函数功能: 初始化* 输入: 无* 输出: 初始化成功返回1,失败返回0*******************************************************************************/ uchar Ds18b20Init(){uchar i;DSPORT = 0;//将总线拉低480us~960usi = 70;while(i--);//延时642usDSPORT = 1;//然后拉高总线,如果DS18B20做出反应会将在15us~60us后总线拉低i = 0;while(DSPORT)//等待DS18B20拉低总线{Delay1ms(1);i++;if(i>5)//等待>5MS{return 0;//初始化失败}}return 1;//初始化成功}/******************************************************************************** 函数名: Ds18b20WriteByte* 函数功能: 向18B20写入一个字节* 输入: com* 输出: 无*******************************************************************************/void Ds18b20WriteByte(uchar dat){uint i, j;for(j=0; j<8; j++){DSPORT = 0;//每写入一位数据之前先把总线拉低1usi++;DSPORT = dat & 0x01; //然后写入一个数据,从最低位开始i=6;while(i--); //延时68us,持续时间最少60usDSPORT = 1;//然后释放总线,至少1us给总线恢复时间才能接着写入第二个数值dat >>= 1;}}/******************************************************************************** 函数名: Ds18b20ReadByte* 函数功能: 读取一个字节* 输入: com* 输出: 无*******************************************************************************/ uchar Ds18b20ReadByte(){uchar byte, bi;uint i, j;for(j=8; j>0; j--){DSPORT = 0;//先将总线拉低1usi++;DSPORT = 1;//然后释放总线i++;i++;//延时6us等待数据稳定bi = DSPORT;//读取数据,从最低位开始读取/*将byte左移一位,然后与上右移7位后的bi,注意移动之后移掉那位补0。
基于51单片机的DS18B20数字温度计的设计_电子时钟课程设计

单片机应用课程设计(设计课题: 电子时钟及温度控制器院(系、部): 机械工程系专业: 机械制造及其自动化专业一、单片机电子时钟的设计目录第一章前言 (3)第二章方案论证与比较 (3)2.1数字时钟方案 (3)2.2数码管显示方案 (4)第三章系统设计 (5)3.1总体设计 (5)3.1.1系统说明 (5)3.1.2系统框图..................................................... 错误!未定义书签。
第四章原理图与仿真图. (6)4.1 Protel原理图 (6)4.2 Proteus 仿真图 (7)4.3流程图 (8)4.4源程序清单 (10)4.5设计总结 (18)第五章实验心得体会 (19)第六章参考文献 (20)第一章前言单片机自20世纪70年代问世以来,以其极高的性能价格比,受到人们的重视和关注,应用很广、发展很快。
单片机体积小、重量轻、抗干扰能力强、环境要求不高、价格低廉、可靠性高、灵活性好、开发较为容易。
由于具有上述优点,在我国,单片机已广泛地应用在工业自动化控制、自动检测、智能仪器仪表、家用电器、电力电子、机电一体化设备等各个方面,而51单片机是各单片机中最为典型和最有代表性的一种。
这次毕业设计通过对它的学习、应用,以AT89S51芯片为核心,辅以必要的电路,设计了一个简易的电子时钟,它由4.5V直流电源供电,通过数码管能够准确显示时间,日期,调整时间,日期,从而到达学习、设计、开发软、硬件的能力。
时钟电路在计算机系统中起着非常重要的作用,是保证系统正常工作的基础。
在一个单片机应用系统中,时钟有两方面的含义:一是指为保障系统正常工作的基准振荡定时信号,主要由晶振和外围电路组成,晶振频率的大小决定了单片机系统工作的快慢;二是指系统的标准定时时钟,即定时时间,它通常有两种实现方法:一是用软件实现,即用单片机内部的可编程定时/计数器来实现,但误差很大,主要用在对时间精度要求不高的场合;二是用专门的时钟芯片实现,在对时间精度要求很高的情况下,通常采用这种方法,典型的时钟芯片有:DS1302,DS12887,X1203等都可以满足高精度的要求。
基于51单片机和DS18B20的数字温度计设计说明

基于51单片机和DS18B20的数字温度计设计说明
1.硬件设计:
-51单片机:选择合适的型号,如STC89C52或AT89C52等。
-DS18B20温度传感器:该传感器是一种数字温度传感器,具有单总线接口和高精度测量能力。
-接口电路:将51单片机和DS18B20传感器连接起来,要注意电平转换和信号线的阻抗匹配。
2.软件设计:
-初始化:在主函数中,首先对单片机进行初始化设置,包括时钟设置、串口配置等。
-DS18B20通信协议:使用单总线协议与DS18B20传感器进行通信,包括发送复位信号、读写数据等操作。
-温度测量:通过向DS18B20发送读取温度的命令,从传感器中读取温度值并保存。
-数据传输:将温度值转换为可显示的格式,如摄氏度或华氏度,并通过串口输出或LED显示。
3.程序流程:
-初始化单片机,设置时钟和串口参数。
-进入主循环,循环执行以下操作:
-发送复位信号,启动温度转换。
-等待转换完成,发送读取温度命令。
-读取温度值,并进行数据处理转换。
-输出温度值。
4.其他功能:
-可以添加LCD显示模块,将温度值显示在液晶屏上。
-可以添加按键输入模块,通过按键切换温度单位或进行其他操作。
需要注意的是,该设计只是一个简单的示例,实际应用中可能需要根据具体需求进行扩展和修改。
同时,在程序设计过程中,也要注意低功耗和数据稳定性等方面的考虑。
基于51单片机——Ds18B20温度采集,LCD显示汇编程序(附带proteus仿真图)

TEMP_ZH EQU 24H ;实测温度值存放单元TEMPL EQU 25HTEMPH EQU 26HTEMP_TH EQU 27H ;高温报警值存放单元TEMP_TL EQU 28H ;低温报警值存放单元TEMPHC EQU 29H ;正、负温度值标记TEMPLC EQU 2AHTEMPFC EQU 2BHK1 EQU P1.4 ;查询按键K2 EQU P1.5 ;设置/调整键K3 EQU P1.6 ;调整键K4 EQU P1.7 ;确定键BEEP EQU P3.7 ;蜂鸣器RELAY EQU P1.3 ;指示灯LCD_X EQU 2FH ;LCD 字符显示位置LCD_RS EQU P2.0 ;LCD 寄存器选择信号 LCD_RW EQU P2.1 ;LCD 读写信号LCD_EN EQU P2.2 ;LCD 允许信号FLAG1 EQU 20H.0 ;DS18B20是否存在标志 KEY_UD EQU 20H.1 ;设定按键的增、减标志 DQ EQU P3.3 ;DS18B20数据信号ORG 0000HLJMP MAINORG 0030HMAIN: MOV SP,#60HMOV A,#00HMOV R0,#20H ;将20H~2FH 单元清零MOV R1,#10HCLEAR: MOV @R0,AINC R0DJNZ R1,CLEARLCALL SET_LCDLCALL RE_18B20START: LCALL RST ;调用18B20复位子程序JNB FLAG1,START1 ;DS1820不存在LCALL MENU_OK ;DS1820存在,调用显示正确信息子程序MOV TEMP_TH,#055H ;设置TH初值85度MOV TEMP_TL,#019H ;设置TL初值25度LCALL RE_18B20A ;调用暂存器操作子程序LCALL WRITE_E2 ;写入DS18B20LCALL TEMP_BJ ;显示温度标记JMP START2START1: LCALL MENU_ERROR ;调用显示出错信息子程序 LCALL TEMP_BJ ;显示温度标记SJMP $START2: LCALL RST ;调用DS18B20复位子程序JNB FLAG1,START1 ;DS18B20不存在MOV A,#0CCH ;跳过ROM匹配命令LCALL WRITEMOV A,#44H ;温度转换命令LCALL WRITELCALL RSTMOV A,#0CCH ;跳过ROM匹配LCALL WRITEMOV A,#0BEH ;读温度命令LCALL WRITELCALL READ ;调用DS18B20数据读取操作子程序LCALL CONVTEMP ;调用温度数据BCD 码处理子程序LCALL DISPBCD ;调用温度数据显示子程序LCALL CONV ;调用LCD显示处理子程序LCALL TEMP_COMP ;调用实测温度值与设定温度值比较子程序LCALL PROC_KEY ;调用键扫描子程序SJMP START2 ;循环;*************************** 键扫描子程序*****************************PROC_KEY:JB K1,PROC_K1LCALL BEEP_BLJNB K1,$MOV DPTR,#M_ALAX1MOV A,#1LCALL LCD_PRINTLCALL LOOK_ALARMJB K3,$LCALL BEEP_BLJMP PROC_K2PROC_K1: JB K2,PROC_ENDLCALL BEEP_BLJNB K2,$MOV DPTR,#RST_A1MOV A,#1LCALL LCD_PRINTLCALL SET_ALARMLCALL RE_18B20 ;将设定的TH,TL值写入DS18B20LCALL WRITE_E2PROC_K2: LCALL MENU_OKLCALL TEMP_BJPROC_END:RET;*************************** 设定温度报警值TH、TL ***************************SET_ALARM:LCALL LOOK_ALARMAS0: JB K1,AS00LCALL BEEP_BLJNB K1,$CPL 20H.1 ;UP/DOWN 标记AS00: JB 20H.1,ASZ01 ;20H.1=1,增加JMP ASJ01 ;20H.1=0,减小ASZ01: JB K2,ASZ02 ;TH值调整(增加)LCALL BEEP_BLINC TEMP_THMOV A,TEMP_THCJNE A,#120,ASZ011MOV TEMP_TH,#0ASZ011: LCALL LOOK_ALARMLCALL DELAYJMP ASZ01ASZ02: JB K3,ASZ03 ;TL值调整(增加) LCALL BEEP_BLINC TEMP_TLMOV A,TEMP_TLCJNE A,#99,ASZ021MOV TEMP_TL,#00HASZ021: LCALL LOOK_ALARMMOV R5,#10LCALL DELAYJMP ASZ02ASZ03: JB K4,AS0 ;确定调整LCALL BEEP_BLJNB K4,$RETASJ01: JB K2,ASJ02 ;TH值调整(减少) LCALL BEEP_BLDEC TEMP_THMOV A,TEMP_THCJNE A,#0FFH,ASJ011ASJ011: LCALL LOOK_ALARMMOV R5,#10LCALL DELAYJMP AS0ASJ02: JB K3,ASJ03 ;TL值调整(减少)LCALL BEEP_BLDEC TEMP_TLMOV A,TEMP_TLCJNE A,#0FFH,ASJ021JMP ASJ022ASJ021: LCALL LOOK_ALARM ;MOV R5,#10LCALL DELAYJMP AS0ASJ022: CPL 20H.1JMP ASZ01ASJ03: JMP ASZ03RETRST_A1: DB " SET ALERT CODE " ,0;*********************** 实测温度值与设定温度值比较子程序**********************TEMP_COMP:MOV A,TEMP_THSUBB A,TEMP_ZH ;减数>被减数,则JC CHULI1 ;借位标志位C=1,转 MOV A,TEMPFCCJNE A,#0BH,COMPSJMP CHULI2COMP: MOV A,TEMP_ZHSUBB A,TEMP_TL ;减数>被减数,则JC CHULI2 ;借位标志位C=1,转MOV DPTR,#BJ5LCALL TEMP_BJ3CLR RELAY ;点亮指示灯RETCHULI1: MOV DPTR,#BJ3LCALL TEMP_BJ3SETB RELAY ;熄灭指示灯LCALL BEEP_BL ;蜂鸣器响RETCHULI2: MOV DPTR,#BJ4LCALL TEMP_BJ3SETB RELAY ;熄灭指示灯LCALL BEEP_BL ;蜂鸣器响RET;-----------------------------------------TEMP_BJ3: MOV A,#0CEHLCALL WCOMMOV R1,#0MOV R0,#2BBJJ3: MOV A,R1MOVC A,@A+DPTRLCALL WDATAINC R1DJNZ R0,BBJJ3RETBJ3: DB ">H"BJ4: DB "<L"BJ5: DB " !";;**************************** 显示温度标记子程序***************************TEMP_BJ: MOV A,#0CBHLCALL WCOMMOV DPTR,#BJ1 ;指针指到显示消息MOV R1,#0MOV R0,#2BBJJ1: MOV A,R1MOVC A,@A+DPTRLCALL WDATAINC R1DJNZ R0,BBJJ1RETBJ1: DB 00H,"C";******************************** 显示正确信息子程序***************************MENU_OK: MOV DPTR,#M_OK1 ;指针指到显示消息MOV A,#1 ;显示在第一行LCALL LCD_PRINTMOV DPTR,#M_OK2 ;指针指到显示消息MOV A,#2 ;显示在第一行LCALL LCD_PRINTRETM_OK1: DB " DS18B20 OK ",0M_OK2: DB " TEMP: ",0;******************************** 显示出错信息子程序***************************MENU_ERROR:MOV DPTR,#M_ERROR1 ;指针指到显示消息MOV A,#1 ;显示在第一行LCALL LCD_PRINTMOV DPTR,#M_ERROR2 ;指针指到显示消息1MOV A,#2 ;显示在第一行LCALL LCD_PRINTRETM_ERROR1: DB " DS18B20 ERROR ",0M_ERROR2: DB " TEMP: ---- ",0;****************************DS18B20复位子程序*****************************RST: SETB DQNOPCLR DQMOV R0,#6BH ;主机发出延时复位低脉冲MOV R1,#04HTSR1: DJNZ R0,$MOV R0,#6BHDJNZ R1,TSR1SETB DQ ;拉高数据线NOPNOPNOPMOV R0,#32HTSR2: JNB DQ,TSR3 ;等待DS18B20回应DJNZ R0,TSR2JMP TSR4 ; 延时TSR3: SETB FLAG1 ; 置1标志位,表示DS1820存在JMP TSR5TSR4: CLR FLAG1 ; 清0标志位,表示DS1820不存在 JMP TSR7TSR5: MOV R0,#06BHTSR6: DJNZ R0,$ ; 时序要求延时一段时间TSR7: SETB DQRET;************************ DS18B20暂存器操作子程序***************************RE_18B20:JB FLAG1,RE_18B20ARETRE_18B20A:LCALL RSTMOV A,#0CCH ;跳过ROM匹配LCALL WRITEWR_SCRAPD:MOV A,#4EH ;写暂器LCALL WRITEMOV A,TEMP_TH ;TH(报警上限)LCALL WRITEMOV A,TEMP_TL ;TL(报警下限)LCALL WRITEMOV A,#7FH ;12位精度LCALL WRITERET;************************ 复制暂存器子程序*******************************WRITE_E2:LCALL RSTMOV A,#0CCH ;跳过ROM匹配LCALL WRITEMOV A,#48H ;把暂存器里的温度报警值拷贝到EEROMLCALL WRITERET;*********************** 重读EEROM子程序********************************READ_E2:LCALL RSTMOV A,#0CCH ;跳过ROM匹配LCALL WRITEMOV A,#0B8H ;把EEROM里的温度报警值拷贝回暂存器LCALL WRITERET;************************ 将自定义字符写入LCD的CGRAM中*********************STORE_DATA:MOV A,#40HLCALL WCOMMOV R2,#08HMOV DPTR,#D_DATAMOV R3,#00HS_DATA: MOV A,R3MOVC A,@A+DPTRLCALL WDATA ;写入数据INC R3DJNZ R2,S_DATARETD_DATA: DB 0CH,12H,12H,0CH,00H,00H,00H,00H;*********************** DS18B20数据写入操作子程序************************WRITE: MOV R2,#8 ;一共8位数据CLR CWR1: CLR DQ ;开始写入DS18B20总线要处于复位(低)状态MOV R3,#07DJNZ R3,$ ;总线复位保持16微妙以上RRC A ;把一个字节DATA 分成8个BIT 环移给CMOV DQ,C ;写入一位MOV R3,#3CHDJNZ R3,$ ;等待100微妙SETB DQ ;重新释放总线NOPDJNZ R2,WR1 ;写入下一位SETB DQRET;********************** DS18B20数据读取操作子程序**************************READ: MOV R4,#4 ;将温度低位、高位、TH、TL从DS18B20中读出MOV R1,#TEMPL ;存入25H、26H、27H、28H单元RE00: MOV R2,#8RE01: CLR CYSETB DQNOPNOPCLR DQ ;读前总线保持为低NOPNOPNOPSETB DQ ;开始读总线释放MOV R3,#09 ;延时18微妙DJNZ R3,$MOV C,DQ ;从DS18B20总线读得一位MOV R3,#3CHDJNZ R3,$ ;等待100微妙RRC A ;把读得的位值环移给ADJNZ R2,RE01 ;读下一位MOV @R1,AINC R1DJNZ R4,RE00RET;************************ 温度值BCD 码处理子程序*************************CONVTEMP: MOV A,TEMPH ;判温度是否零下ANL A,#08HJZ TEMPC1 ;温度零上转CLR CMOV A,TEMPL ;二进制数求补(双字节)CPL A ;取反加1ADD A,#01HMOV TEMPL,AMOV A,TEMPHCPL AADDC A,#00HMOV TEMPH,AMOV TEMPHC,#0BH ;负温度标志MOV TEMPFC,#0BHSJMP TEMPC11TEMPC1: MOV TEMPHC,#0AH ;正温度标志MOV TEMPFC,#0AHTEMPC11: MOV A,TEMPHCSWAP AMOV TEMPHC,AMOV A,TEMPLANL A,#0FH ;乘0.0625MOV DPTR,#TEMPDOTTABMOVC A,@A+DPTRMOV TEMPLC,A ;TEMPLC LOW=小数部分 BCDMOV A,TEMPL ;整数部分ANL A,#0F0H ;取出高四位SWAP AMOV TEMPL,AMOV A,TEMPH ;取出低四位ANL A,#0FHSWAP AORL A,TEMPL ;重新组合MOV TEMP_ZH,ALCALL HEX2BCD1MOV TEMPL,AANL A,#0F0HSWAP AORL A,TEMPHC ;TEMPHC LOW = 十位数BCDMOV TEMPHC,AMOV A,TEMPLANL A,#0FHSWAP A ;TEMPLC HI = 个位数BCDORL A,TEMPLCMOV TEMPLC,AMOV A,R4JZ TEMPC12ANL A,#0FHSWAP AMOV R4,AMOV A,TEMPHC ;TEMPHC HI = 百位数BCDANL A,#0FHORL A,R4MOV TEMPHC,ATEMPC12: RET;************************ 二-十进制转换子程序*****************************HEX2BCD1: MOV B,#064HDIV ABMOV R4,AMOV A,#0AHXCH A,BDIV ABSWAP AORL A,BRETTEMPDOTTAB: DB 00H,00H,01H,01H,02H,03H,03H,04H ; 小数部分码表DB 05H,05H,06H,06H,07H,08H,08H,09H;********************** 查询温度报警值子程序***************************LOOK_ALARM: MOV DPTR,#M_ALAX2 ;指针指到显示信息区MOV A,#2 ;显示在第二行LCALL LCD_PRINTMOV A,#0C6HLCALL TEMP_BJ1MOV A,TEMP_TH ;加载TH数据MOV LCD_X,#3 ;设置显示位置LCALL SHOW_DIG2H ;显示数据MOV A,#0CEHLCALL TEMP_BJ1MOV A,TEMP_TL ;加载TL数据MOV LCD_X,#12 ;设置显示位置LCALL SHOW_DIG2L ;显示数据RETM_ALAX1: DB " LOOK ALERT CODE",0M_ALAX2: DB "TH: TL: ",0TEMP_BJ1: LCALL WCOMMOV DPTR,#BJ2 ;指针指到显示信息区 MOV R1,#0MOV R0,#2BBJJ2: MOV A,R1MOVC A,@A+DPTRLCALL WDATADJNZ R0,BBJJ2RETBJ2: DB 00H,"C";************************** LCD显示子程序**********************************SHOW_DIG2H: MOV B,#100DIV ABADD A,#30HPUSH BMOV B,LCD_XLCALL LCDP2POP BMOV A,#0AHXCH A,BDIV ABADD A,#30HINC LCD_XPUSH BMOV B,LCD_XLCALL LCDP2INC LCD_XMOV A,BMOV B,LCD_XADD A,#30HLCALL LCDP2RETSHOW_DIG2L: MOV B,#100DIV ABMOV A,#0AHXCH A,BDIV ABADD A,#30HPUSH BMOV B,LCD_XLCALL LCDP2POP BINC LCD_XMOV A,BMOV B,LCD_XADD A,#30HLCALL LCDP2RET;************************ 显示区BCD 码温度值刷新子程序**********************DISPBCD: MOV A,TEMPLCANL A,#0FHMOV 70H,A ;小数位MOV A,TEMPLCSWAP AANL A,#0FHMOV 71H,A ;个位MOV A,TEMPHCANL A,#0FHMOV 72H,A ;十位MOV A,TEMPHCSWAP AANL A,#0FHMOV 73H,A ;百位DISPBCD2: RET;*************************** LCD 显示数据处理子程序*************************CONV: MOV A,73H ;加载百位数据MOV LCD_X,#6 ;设置位置CJNE A,#1,CONV1JMP CONV2CONV1: CJNE A,#0BH,CONV11MOV A,#"-" ;"-"号显示JMP CONV111CONV11: MOV A,#" " ;"+"号不显示CONV111: MOV B,LCD_XLCALL LCDP2JMP CONV3CONV2: LCALL SHOW_DIG2 ;显示数据CONV3: INC LCD_XMOV A,72H ;十位LCALL SHOW_DIG2INC LCD_XMOV A,71H ;个位LCALL SHOW_DIG2INC LCD_XMOV A,#'.'MOV B,LCD_XLCALL LCDP2MOV A,70H ;加载小数点位INC LCD_X ;设置显示位置LCALL SHOW_DIG2 ;显示数据RET;*************************** 第二行显示数字子程序*************************SHOW_DIG2:ADD A,#30HMOV B,LCD_XLCALL LCDP2RET;*************************** 第二行显示数字子程序*************************LCDP2: PUSH ACCMOV A,B ;设置显示地址ADD A,#0C0H ;设置LCD的第二行地址LCALL WCOM ;写入命令POP ACC ;由堆栈取出ALCALL WDATA ;写入数据RET;*************************** 对LCD 做初始化设置及测试*************************SET_LCD: CLR LCD_ENLCALL INIT_LCD ;初始化 LCDLCALL STORE_DATA ;将自定义字符存入LCD的CGRAM RET;****************************** LCD初始化***********************************INIT_LCD: MOV A,#38H ;2行显示,字形5*7点阵LCALL WCOMLCALL DELAY1MOV A,#38HLCALL WCOMLCALL DELAY1MOV A,#38HLCALL WCOMLCALL DELAY1MOV A,#0CH ;开显示,显示光标,光标不闪烁 LCALL WCOMLCALL DELAY1MOV A,#01H ;清除 LCD 显示屏LCALL WCOMLCALL DELAY1RET;***************************** 清除LCD的第一行字符**************************CLR_LINE1:MOV A,#80H ;设置 LCD 的第一行地址LCALL WCOMMOV R0,#24 ;设置计数值C1: MOV A,#' ' ;载入空格符至LCDLCALL WDATA ;输出字符至LCDDJNZ R0,C1 ;计数结束RET;************************* LCD的第一行或第二行显示字符**********************LCD_PRINT:CJNE A,#1,LINE2 ;判断是否为第一行LINE1: MOV A,#80H ;设置 LCD 的第一行地址LCALL WCOM ;写入命令LCALL CLR_LINE ;清除该行字符数据MOV A,#80H ;设置 LCD 的第一行地址LCALL WCOM ;写入命令JMP FILLLINE2: MOV A,#0C0H ;设置 LCD 的第二行地址LCALL WCOM ;写入命令LCALL CLR_LINE ;清除该行字符数据MOV A,#0C0H ;设置 LCD 的第二行地址LCALL WCOMFILL: CLR A ;填入字符MOVC A,@A+DPTR ;由消息区取出字符CJNE A,#0,LC1 ;判断是否为结束码RETLC1: LCALL WDATA ;写入数据INC DPTR ;指针加1JMP FILL ;继续填入字符RET;*************************** 清除1行LCD 的字符****************************CLR_LINE: MOV R0,#24CL1: MOV A,#' 'LCALL WDATADJNZ R0,CL1RETDE: MOV R7,#250DJNZ R7,$RET;**************************** LCD 间接控制方式命令写入*************************WCOM: MOV P0,A ;写入命令CLR LCD_RS ;RS=L,RW=L,D0-D7=指令码,E=高脉冲 CLR LCD_RWSETB LCD_ENLCALL DELAY1CLR LCD_ENRET;**************************** LCD 间接控制方式数据写入*************************WDATA: MOV P0,A ;写入数据SETB LCD_RSCLR LCD_RWSETB LCD_ENLCALL DELCALL DERET;************************** 在LCD的第一行显示字符**************************LCDP1: PUSH ACCMOV A,B ;设置显示地址ADD A,#80H ;设置LCD的第一行地址LCALL WCOM ;写入命令POP ACC ;由堆栈取出ALCALL WDATA ;写入数据RET;****************************** 声光报警子程序*******************************BEEP_BL: MOV R6,#100BL2: LCALL DEX1CPL BEEPCPL RELAYDJNZ R6,BL2MOV R5,#10RETDEX1: MOV R7,#180DE2: NOPDJNZ R7,DE2RET;****************************** 延时子程序*******************************DELAY: MOV R6,#50DL1: MOV R7,#100DJNZ R7,$DJNZ R6,DL1DJNZ R5,DELAYRETDELAY1: MOV R6,#25 ;延时5毫秒DL2: MOV R7,#100DJNZ R7,$DJNZ R6,DL2RETEND。
基于51单片机与DS18B20的数字温度计设计

信息与通信工程学院课程设计项目:基于单片机的DS18B20数字温度计设计指导老师:湛腾西设计人:尹世强彭娇礼班级:电实11-1BF2013 年06 月18 日1 设计要求1.1 基本要求1、测量精度0.5℃2、范围:-50℃-110℃3、可测多点温度,演示两点以上4、LED直读显示5、可任意设计温度报警的上限与下限6、可上传通信(RS232口),也可以相互对通(485口)1.2 扩展功能温度报警,能任意设定温度范围实现声光报警;每隔10分钟记录一次温度数据,至少能查询过去10个时刻的温度情况。
2 元器件清单3 总体方案设计2.1 方案论证 2.1.1 方案一由于本设计是测温电路,可以使用热敏电阻之类的器件,将随被测温度变化的电压或电流采样,进行A/D 转换后就可以用单片机进行数据处理,实现温度显示。
这种设计需要用到A/D 转换电路,增大了电路的复杂性,而且要做到高精度也比较困难。
2.1.2 方案二考虑到在单片机属于数字系统,容易想到数字温度传感器,可选用DS18B20数字温度传感器,此传感器为单总线数字温度传感器,起体积小、构成的系统结构简单,它可直接将温度转化成串行数字信号给单片机处理,即可实现温度显示。
另外DS18B20具有3引脚的小体积封装,测温范围为-55~+125摄氏度,测温分辨率可达0.0625摄氏度,其测量范围与精度都能符合设计要求。
以上两种方案相比较,第二种方案的电路、软件设计更简单,此方案设计的系统在功耗、测量精度、范围等方面都能很好地达到要求,故本设计采用方案二。
图1 系统总体方框图2.2 总体设计框图本方案设计的系统由单片机系统、数字温度传感器、LED显示模块、按键控制模块、温度报警模块组成,其总体架构如图1。
3 硬件设计3.1 单片机系统1.本设计采用STC89C52单片机作为控制器,完成所有功能的控制,包括:●DS18B20数字温度传感器的初始化和读取温度值●LED数码管显示驱动与控制●按键识别和响应控制●温度设置和报警●温度值的存储和读取2.单片机系统电路原理图:图2 单片机系统原理图4.1 数字温度传感器模块4.1.1 DS18B20性能●独特的单线接口仅需一个端口引脚进行通信●简单的多点分布应用●无需外部器件●可通过数据线供电●零待机功耗●测温范围-55~+125℃,以0.5℃递增●可编程的分辨率为9~12位,对应的可分辨温度分别为0.5℃、0.25℃、0.125℃和0.0625℃●温度数字量转换时间200ms,12位分辨率时最多在750ms内把温度转换为数字●应用包括温度控制、工业系统、消费品、温度计和任何热感测系统●负压特性:电源极性接反时,传感器不会因发热而烧毁,但不能正常工作4.1.2 DS18B20外形及引脚说明图3 DS18B20外形及引脚●GND:地●DQ:单线运用的数据输入/输出引脚●VD:可选的电源引脚4.1.3 DS18B20接线原理图单总线通常要求接一个约4.7K左右的上拉电阻,这样,当总线空闲时,其状态为高电平。
基于51单片机DS18B20温度采集器详解
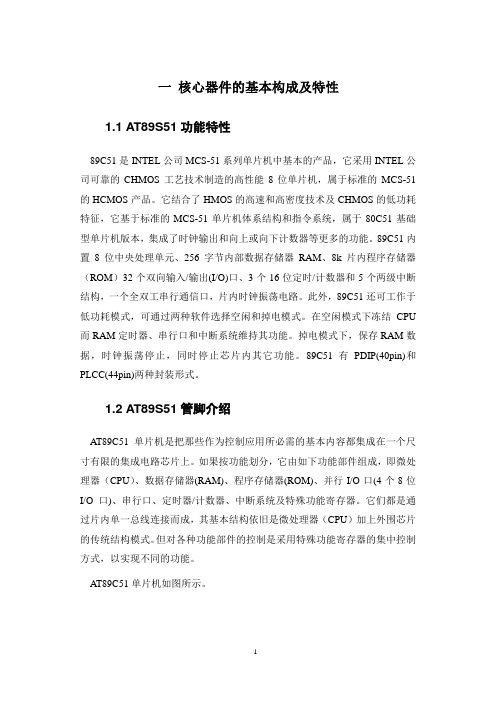
一核心器件的基本构成及特性1.1 AT89S51功能特性89C51是INTEL公司MCS-51系列单片机中基本的产品,它采用INTEL公司可靠的CHMOS工艺技术制造的高性能8位单片机,属于标准的MCS-51的HCMOS产品。
它结合了HMOS的高速和高密度技术及CHMOS的低功耗特征,它基于标准的MCS-51单片机体系结构和指令系统,属于80C51基础型单片机版本,集成了时钟输出和向上或向下计数器等更多的功能。
89C51内置8位中央处理单元、256字节内部数据存储器RAM、8k片内程序存储器(ROM)32个双向输入/输出(I/O)口、3个16位定时/计数器和5个两级中断结构,一个全双工串行通信口,片内时钟振荡电路。
此外,89C51还可工作于低功耗模式,可通过两种软件选择空闲和掉电模式。
在空闲模式下冻结CPU 而RAM定时器、串行口和中断系统维持其功能。
掉电模式下,保存RAM数据,时钟振荡停止,同时停止芯片内其它功能。
89C51有PDIP(40pin)和PLCC(44pin)两种封装形式。
1.2 AT89S51管脚介绍AT89C51单片机是把那些作为控制应用所必需的基本内容都集成在一个尺寸有限的集成电路芯片上。
如果按功能划分,它由如下功能部件组成,即微处理器(CPU)、数据存储器(RAM)、程序存储器(ROM)、并行I/O口(4个8位I/O口)、串行口、定时器/计数器、中断系统及特殊功能寄存器。
它们都是通过片内单一总线连接而成,其基本结构依旧是微处理器(CPU)加上外围芯片的传统结构模式。
但对各种功能部件的控制是采用特殊功能寄存器的集中控制方式,以实现不同的功能。
AT89C51单片机如图所示。
1.1.1引脚功能介绍Vcc(40引脚):接+5V电源。
Vss(20引脚):接地。
XTAL1(19引脚):片内振荡器反相放大器和时钟发生器电路的输入端。
XTAL2(18引脚):片内震荡器反相放大器的输出端。
RST:复位引脚,高电平有效。
基于51单片机和DS18B20的数字温度计设计说明

基于51单片机和DS18B20的数字温度计设计说明题目:基于89C51和DS18B20的数字温度计设计一、设计要求数字式温度计要求测温范围为-55~125°C,精度误差在0.1°C以内,LED数码管直读显示。
二、方案论证根据系统的设计要求,选择DS18B20作为本系统的温度传感器,选择单片机AT89C51为测控系统的核心来完成数据采集、处理、显示、报警等功能。
选用数字温度传感器DS18B20,省却了采样/保持电路、运放、数/模转换电路以及进行长距离传输时的串/并转换电路,简化了电路,缩短了系统的工作时间,降低了系统的硬件成本。
该系统的总体设计思路如下:温度传感器DS18B20把所测得的温度发送到AT89C51单片机上,经过51单片机处理,将把温度在显示电路上显示,本系统显示器用4位共阳LED数码管以动态扫描法实现。
检测范围-55摄氏度到125摄氏度。
按照系统设计功能的要求,确定系统由3个模块组成:主控制器、测温电路和显示电路。
数字温度计总体电路结构框图如图1所示。
图1 数字温度计总体电路结构框图三、系统硬件电路的设计温度计电路设计原理图如图2所示,控制器使用单片机AT89C51,温度传感器使用DS18B20,用4位共阳LED数码管实现温度显示。
图2 数字温度计设计电路原理图1、主控制器AT89C51是一种带4K字节闪烁可编程可擦除只读存储器的低电压,高性能CMOS8位微处理器。
该器件采用ATMEL高密度非易失存储器制造技术制造,与工业标准的MCS-51指令集和输出管脚相兼容。
由于将多功能8位CPU 和闪烁存储器组合在单个芯片中,ATMEL的AT89C51是一种高效微控制器,为很多嵌入式控制系统提供了一种灵活性高且价廉的方案。
2、显示电路显示电路采用4位共阳LED数码管,从P0口输出段码,列扫描用P3.0~P3.3口来实现,列驱动用8550三极管。
3、温度传感器工作原理DS18B20温度传感器是美国DALLAS半导体公司最新推出的一种改进型智能温度传感器,与传统的热敏电阻等测温元件相比,它能直接读出被测温度,并且可根据实际要求通过简单的编程实现9~12位的数字值读数方式。
基于51单片机的DS18B20温度显示

基于51单片机的DS18B20温度显示本讲内容:了解温度传感器DS18B20的使用,并通过一个例程展示温度传感器DS18B20测温过程。
DS18B20简介:DS18B20 是单线数字温度传感器,即“一线器件”,其具有独特的优点:(1)采用单总线的接口方式与微处理器连接时仅需要一条口线即可实现微处理器与 DS18B20 的双向通讯。
单总线具有经济性好,抗干扰能力强,适合于恶劣环境的现场温度测量,使用方便等优点,使用户可轻松地组建传感器网络。
(2)测量温度范围宽,测量精度高。
DS18B20 的测量范围为-55 ℃ ~+ 125 ℃;在 -10~+ 85°C 范围内,精度为± 0.5°C 。
(3)多点组网功能多个 DS18B20 并联在惟一的单线上,实现多点测温。
DS18B20的存储器由一个高速暂存RAM 和一个非易失性、电可擦除(E2)RAM 组成。
配置寄存器:出场设置默认R0、R1为11。
也就是12位分辨率,也就是1位代表0.0625摄氏度。
DS18B20经转换所得的温度值以二字节补码形式存放在高速暂存存储器的第0和第1个字节。
所以当我们只想简单的读取温度值的时候,只用读取暂存器中的第0和第1个字节就可以了。
简单的读取温度值的步骤如下: 1:跳过ROM 操作 2:发送温度转换命令 3:跳过ROM 操作 4:发送读取温度命令 5:读取温度值 DS18B20接口电路图:DS18B20的初始化:主机首先发出一个480-960微秒的低电平脉冲,然后释放总线变为高电平,并在随后的480微秒时间内对总线进行检测,如果有低电平出现说明总线上有器件已做出应答。
若无低电平出现一直都是高电平说明总线上无器件应答。
做为从器件的DS18B20在一上电后就一直在检测总线上是否有480-960微秒的低电平出现,如果有,在总线转为高电平后等待15-60微秒后将总线电平拉低60-240微秒做出响应存在脉冲,告诉主机本器件已做好准备。
基于51单片机DS18B20温度传感器的C语言程序和电路

基于51单片机DS18B20温度传感器的C 语言程序和电路DS18B2C 在外形上和三极管很像,有三只脚。
电压范围为 3.0 V 至5.5 V 无需备用电源 测量温度 位 温度转换为 12 位数字格式最大值为 750 毫秒 用户可定义的非易失性温度报警设置 应用范围包 敏感系统。
F 面是DS18B20勺子程序,本人用过完全可行的: #include<reg51.h> #include<intrins.h>#define uchar unsigned char #define uint unsigned int sbit DQ=P2A 0;void reset(); void write_byte(uchar val); uchar read_byte(void); void read_temp(); void work_temp(); uchar data temp_data[2]={0x00,0x00};uchar datadisplay[5]={0x00,0x00,0x00,0x00,0x00}; // 对于温度显示值值 uchar code ditab[16]={0x00,0x01,0x01,0x02,0x03,0x03,0x04,0x04,0x05,0x06,0x06,0x07,0x0 数部分查表 main() {while(1) {自己添加 ;void delay1(uint t) {for(;t>0;t--); }/////// 温度控制子函数 void reset(){uchar presence=1; while(presence){ while(presence){DQ=1;_nop_();_nop_(); DQ=0;delay1(50); DQ=1; delay1(6);presence=DQ;}delay1(45); presence=~DQ; }//DS18B20//DS18B20 写命令函数 //DS18B20 读 1 字节函数// 温度读取函数 // 温度数据处理函数DQ=1;}void write_byte(uchar val){uchar i;for(i=8;i>0;i--){DQ=1;_nop_();_nop_();DQ=0;_nop_();_nop_();_nop_();_nop_();_nop_();DQ=val&0x01;delay1(6);val=val/2;}DQ=1;_nop_();}uchar read_byte(void){uchar i;uchar value=0;for(i=8;i>0;i--){DQ=1;_nop_();_nop_();value>>=1;DQ=0; _nop_();_nop_();_nop_();_nop_(); DQ=1;_nop_();_nop_();_nop_();_nop_();if(DQ)value|=0x80;delay1(6);}DQ=1;return(value);void read_temp(){reset();write_byte(0xcc);write_byte(0xbe);temp_data[0]=read_byte();temp_data[1]=read_byte();reset();write_byte(0xcc);write_byte(0x44);}void work_temp(){if(temp_data[1]>127){ temp_data[1]=(256-temp_data[1]); temp_data[0]=(256-temp_data[0]); n=1; // 需要前面宏定义}display[4]=temp_data[0]&0x0f; // 低位的低4 位display[0]=ditab[display[4]]; // 小数点后的数值display[4]=((temp_data[0]&0xf0) >> 4)|((temp_data[1]&0x0f)<<4); // 小数display[3]=display[4] / 100; display[1]=display[4] % 100;display[2]=display[1] / 10;display[1]=display[1] % 10;}电路:Bi -ij-F16欢迎您的下载,资料仅供参考!致力为企业和个人提供合同协议,策划案计划书,学习课件等等打造全网一站式需求。
基于51单片机的DS18B20温度传感器驱动程序加详解
基于51单片机的DS18B20温度传感器驱动程序加详解//此部分为18B20的驱动程序//本程序验证通过,晶振为12MHz#include <reg52.H>#include <intrins.h>sbit D18B20=P3^7; //DQ接P3^7#define NOP() _nop_()#define _Nop() _nop_()void TempDelay (unsigned char idata us); //延时函数定义void Init18b20 (void); //初始化函数定义void WriteByte (unsigned char idata wr); //单字节写入void read_bytes (unsigned char idata j); //定义多字节数据读取unsigned char CRC (unsigned char j);//定义校验码数组void GemTemp (void); //数据处理void Config18b20 (void); //配置上下限即处理位数(9/10/11) void ReadID (void); //读取器件ID,即ROM中的数据void TemperatuerResult(void); //最终数据输出//bit flag;unsigned int idata Temperature,D[10]; //定义温度数组unsigned char idata temp_buff[9]; //定义RAM数据暂存数组//存储读取的字节,read scratchpad为9字节,read rom ID为8字节unsigned char idata id_buff[8]; //定义ROM数据暂存数组unsigned char idata *p,TIM; //指针变量unsigned char idata crc_data; //CRC计算变量定义unsigned char code CrcTable [256]={0, 94, 188, 226, 97, 63, 221, 131, 194, 156, 126, 32, 163, 253, 31, 65,157, 195, 33, 127, 252, 162, 64, 30, 95, 1, 227, 189, 62 , 96, 130, 220,35, 125, 159, 193, 66, 28, 254, 160, 225, 191, 93, 3, 12 8, 222, 60, 98,190, 224, 2, 92, 223, 129, 99, 61, 124, 34, 192, 158, 29 , 67, 161, 255,70, 24, 250, 164, 39, 121, 155, 197, 132, 218, 56, 102, 229, 187, 89, 7,219, 133, 103, 57, 186, 228, 6, 88, 25, 71, 165, 251, 120, 38, 196, 154, 101, 59, 217, 135, 4, 90, 184, 230, 167, 249, 27, 69, 198, 152, 122, 36,248, 166, 68, 26, 153, 199, 37, 123, 58, 100, 134, 216, 91, 5, 231, 185, 140, 210, 48, 110, 237, 179, 81, 15, 78, 16, 242, 172, 47, 113, 147, 2 05,17, 79, 173, 243, 112, 46, 204, 146, 211, 141, 111, 49, 178, 236, 14, 80,175, 241, 19, 77, 206, 144, 114, 44, 109, 51, 209, 143, 12, 82, 176, 2 38,50, 108, 142, 208, 83, 13, 239, 177, 240, 174, 76, 18, 1 45, 207, 45, 115,202, 148, 118, 40, 171, 245, 23, 73, 8, 86, 180, 234, 105, 55, 213, 139,87, 9, 235, 181, 54, 104, 138, 212, 149, 203, 41, 119, 2 44, 170, 72, 22,233, 183, 85, 11, 136, 214, 52, 106, 43, 117, 151, 201, 74, 20, 246, 168,116, 42, 200, 150, 21, 75, 169, 247, 182, 232, 10, 84, 2 15, 137, 107, 53};//CRC数据表//Function:延时处理void TempDelay (unsigned char idata us){while(us--);}//Function:18B20初始化void Init18b20 (void){D18B20=1; //侦测到下跳沿,初始化_nop_();D18B20=0;TempDelay(160); //delay480 us (480)_nop_();D18B20=1; //释放总线TempDelay(30); //delay 96 us (60-112)_nop_();_nop_();_nop_(); //18B20侦测到此上升沿,会自动应答//发送presence信号//if(D18B20==0)// flag = 1; //detect 1820 success!//else// flag = 0; //detect 1820 fail!TempDelay(30); //delay 96 us(60-240)_nop_(); //发送应答脉冲_nop_();D18B20 = 1; //释放总线}//Function:向18B20写入一个字节void WriteByte (unsigned char idata wr) //单字节写入{unsigned char idata i;for (i=0;i<8;i++){D18B20 = 1;_nop_();D18B20 = 0; //侦测到下跳沿,初始化_nop_();D18B20=wr&0x01; //写数据在(60-120)us内TempDelay(30); //delay 96(60-120)us_nop_();_nop_(); //至少大于1us恢复时间D18B20=1; //释放总线wr >>= 1; //一个字节8位,总共写8次}}//Function:读18B20的一个字节unsigned char ReadByte (void) //读取单字节{unsigned char idata i,u=0;for(i=0;i<8;i++){D18B20 = 1;_nop_();D18B20 = 0; //负跳沿,初始化u >>= 1;D18B20 = 1; //释放总线if(D18B20==1)u |= 0x80;TempDelay (3); //15us内采样_nop_();}return(u);}//Function:读18B20void read_bytes (unsigned char idata j){unsigned char idata i;for(i=0;i<j;i++){*p = ReadByte();p++;}}//Function:CRC校验unsigned char CRC (unsigned char j){unsigned char idata i,crc_data=0;for(i=0;i<j;i++) //查表校验crc_data = CrcTable[crc_data^temp_buff[i]]; return (crc_data);//返回i=8时的crc_data}//若为0,校验正确,即此时的temp_buff[8]=0x00; //Function:读取温度void GemTemp (void){read_bytes (9);if (CRC(9)==0) //校验正确{ //暂存器第0字节低8位,第一字节为高8位。
基于51单片机的数字温度计DS18B20全部注释
#include<reg52.h>#define uint unsigned int#define uchar unsigned charsbit rs=P2^4;//向液晶控制器器写数据,写命令选择端sbit rw=P2^5;//向液晶器读,写选择端sbit en=P2^6;//使能信号端,lcd1602sbit DQ=P3^3;//温度传输线,一线双向数据传输uchar s;uchar code a[]="Ai dao hua kai";uchar code b[]="Today:";uchar code c[]="0123456789";uchar code d[]=".C";uchar code e[]="error";void delay(uint x)//延时x毫秒,晶振为12MHz{uint i,j;for(i=x;i>0;i--)for(j=120;j>0;j--);}void lcdxie_zhiling(uchar zhiling);//lcd1602写指令void lcdxie_shuju(uchar shuju);//lcd1602写数据void lcdchushihua();//初始化lcd1602void dschushihua();//18B20初始化bit dubit();//读一位数据函数uchar du_zijie();//读一个字节数据函数void xie_zijie(uchar dat);//向18B20写一个字节void fenpin1(uchar t);//分频显示整数温度void fenpin2(uchar t);//分频显示小数温度void hanshuchushihua();//函数初始化void main(){uchar H,L,N,D;hanshuchushihua();//函数初始化while(1){dschushihua();//18B20初始化L=du_zijie();//先读的是温度值低位H=du_zijie();//接着读的是温度值高位N=H*16+L/16;//整数部分,实际温度值=(H*256+L)/16,即:H*16+L/16D=(L%16)*10/16;//小数部分,将余数乘以10再除以16取整,即第一位小数fenpin1(N);//显示温度的整数部分fenpin2(D);//显示温度的小数部分delay(1); //小延时,做缓冲}}void hanshuchushihua()//函数初始化{lcdchushihua();//初始化lcd1602lcdxie_zhiling(0x80+0x01);for(s=0;s<14;s++)//显示"爱到花开"{lcdxie_shuju(a[s]);delay(5);}lcdxie_zhiling(0x80+0x40+0x02);for(s=0;s<6;s++){lcdxie_shuju(b[s]);//显示"今天"delay(5);}lcdxie_zhiling(0x80+0x40+0x0a);lcdxie_shuju(d[0]);//显示"."lcdxie_zhiling(0x80+0x40+0x0c);lcdxie_shuju(d[1]);//显示"C"delay(5);if(du_zijie()==1)//如果du_zijie()返回的值为1,则18B20可能以坏,将进入死循环 {lcdxie_zhiling(0x80+0x04);for(s=0;s<5;s++)//显示"error";{lcdxie_shuju(e[s]);delay(5);}while(1);//进入死循环}delay(10);}void lcdxie_zhiling(uchar zhiling)//lcd1602写指令{rs=0; //选择写命令模式P0=zhiling;//将要写的命令字送到数据总线上delay(5); //稍作延时以待数据稳定en=1; //使能端给一高脉冲,因为初始化函数中已经将lcden置0 delay(5); //稍作延时en=0; //将使能端置0以完成高脉冲}void lcdxie_shuju(uchar shuju)//lcd1602写数据{rs=1; //选择写数据模式P0=shuju;//将要写的数据字送到数据总线上delay(5); //稍作延时以待数据稳定en=1; //使能端给一高脉冲,因为初始化函数中已经将lcden置0 delay(5);//稍作延时en=0; //将使能端置0以完成高脉冲}void lcdchushihua()//初始化lcd1602{rs=0;rw=0;en=0;lcdxie_zhiling(0x38); //设置16*2显示,5*7点阵,八位数据接口//看资料 lcdxie_zhiling(0x0c); //设置开显示,不显示光标lcdxie_zhiling(0x06); //写一个字符后地址指针加1lcdxie_zhiling(0x01); //显示清0,数据指针清0}void dschushihua()//18B20初始化{dubit(); //将DS18B20初始化xie_zijie(0xCC); // 跳过读序号列号的操作xie_zijie(0x44); // 启动温度转换for(s=0;s<100;s++); //温度转换需要一点时间dubit(); //将DS18B20初始化xie_zijie(0xCC); //跳过读序号列号的操作xie_zijie(0xBE); //读取温度寄存器}bit dubit()//读一位数据函数{bit f;//DS18B20是否存在的标志,f=0,表示存在;f=1,表示不存在DQ=1;//将数据线拉高for(s=0;s<2;s++);//延时6微妙DQ=0;//将数据线从高拉低for(s=0;s<200;s++);//延时600微妙DQ=1;//释放数据线for(s=0;s<10;s++);//延时30微妙,等待DS18B20输出存在脉冲f=DQ;//让单片机检测是否输出了存在脉冲(DQ=0表示存在for(s=0;s<200;s++);//延时600微妙,等待脉冲输出完毕return f;//返回检测成功标志}uchar du_zijie()//读一个字节数据函数{uchar i=0,dat;//dat储存读出的一个字节数据for(i=0;i<8;i++){DQ=1;// 先将数据线拉高;;//延时DQ=0;//将数据线从高拉低即启动读时序dat>>=1;;;//延时DQ=1;//将数据线拉高,为单片机检测DS18B20的输出电平作准备for(s=0;s<2;s++);if(DQ==1)//如果读到的数据是1,则将1存入datdat|=0x80;else dat|=0x00;//如果读到的数据是0,则将0存入datfor(s=0;s<8;s++);//}return (dat); //返回读出的十进制数据}void xie_zijie(uchar dat)//向18B20写一个字节{uchar i=0;for(i=0;i<8;i++){DQ=1;// 先将数据线拉高;;//延时DQ=0;//将数据线从高拉低时即启动写时序;;//延时DQ=dat&0x01;//利用与运算取出要写的某位二进制数据,并将其送到数据线上等待DS18B20采样for(s=0;s<10;s++);DQ=1;//释放数据线for(s=0;s<1;s++);dat>>=1;//将dat中的各二进制位数据右移1位}for(s=0;s<4;s++);}void fenpin1(uchar t)//{uchar j,k;j=(t%100)/10; //取十位k=t%10; //取个位lcdxie_zhiling(0x80+0x40+0x08);//写显示地址,将在第2行第8列开始显示 lcdxie_shuju(c[j]);//将十位数字的字符常量写入LCDlcdxie_shuju(c[k]);//将个位数字的字符常量写入LCDdelay(1);}void fenpin2(uchar t)//{lcdxie_zhiling(0x80+0x40+0x0b);lcdxie_shuju(c[t]);//将小数部分的第一位数字字符常量写入LCDdelay(1);}。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于51单片机及DS18B20温度传感器的数字温度计程序(详细注释)电路实物图如下图所示:C语言程序如下所示:/********************************************************************zicreate----------------------------- Copyright (C) --------------------------* 程序名; 基于DS18B20的测温系统* 功能:实时测量温度,超过上下限报警,报警温度可手动调整。
K1是用来* 进入上下限调节模式的,当按一下K1进入上限调节模式,再按一下进入下限* 调节模式。
在正常模式下,按一下K2进入查看上限温度模式,显示1s左右自动* 退出;按一下K3进入查看下限温度模式,显示1s左右自动退出;按一下K4消除* 按键音,再按一下启动按键音。
在调节上下限温度模式下,K2是实现加1功能,* K1是实现减1功能,K3是用来设定上下限温度正负的。
* 编程者:Jason* 编程时间:2009/10/2*********************************************************************/#include<AT89X52.h> //将AT89X52.h头文件包含到主程序#include<intrins.h> //将intrins.h头文件包含到主程序(调用其中的_nop_()空操作函数延时)#define uint unsigned int //变量类型宏定义,用uint表示无符号整形(16位)#define uchar unsigned char //变量类型宏定义,用uchar表示无符号字符型(8位)uchar max=0x00,min=0x00; //max是上限报警温度,min是下限报警温度bit s=0; //s是调整上下限温度时温度闪烁的标志位,s=0不显示200ms,s=1显示1s左右bit s1=0; //s1标志位用于上下限查看时的显示void display1(uint z); //声明display1()函数#include"ds18b20.h" //将ds18b20.h头文件包含到主程序#include"keyscan.h" //将keyscan.h头文件包含到主程序#include"display.h" //将display.h头文件包含到主程序/***********************主函数************************/void main(){beer=1; //关闭蜂鸣器led=1; //关闭LED灯timer1_init(0); //初始化定时器1(未启动定时器1)get_temperature(1); //首次启动DS18B20获取温度(DS18B20上点后自动将EEPROM中的上下限温度复制到TH和TL寄存器)while(1) //主循环{keyscan(); //按键扫面函数get_temperature(0); //获取温度函数keyscan(); //按键扫面函数display(temp,temp_d*0.625);//显示函数alarm(); //报警函数keyscan(); //按键扫面函数}}/********************************************************************* 程序名; __ds18b20_h__* 功能:DS18B20的c51编程头文件* 编程者:ZPZ* 编程时间:2009/10/2* 说明:用到的全局变量是:无符号字符型变量temp(测得的温度整数部分),temp_d* (测得的温度小数部分),标志位f(测量温度的标志位‘0’表示“正温度”‘1’表* 示“负温度”),标志位f_max(上限温度的标志位‘0’表示“正温度”、‘1’表* 示“负温度”),标志位f_min(下限温度的标志位‘0’表示“正温度”、‘1’表* 示“负温度”),标志位w(报警标志位‘1’启动报警‘0’关闭报警)。
*********************************************************************/#ifndef __ds18b20_h__ //定义头文件#define __ds18b20_h__#define uint unsigned int //变量类型宏定义,用uint表示无符号整形(16位)#define uchar unsigned char //变量类型宏定义,用uchar表示无符号字符型(8位)sbit DQ= P2^3; //可位寻址变量定义,用DQ表示P2.3口sbit beer=P1^0; //用beer表示P1.0sbit led=P1^1; //用led表示P1.1uchar temp=0; //测量温度的整数部分uchar temp_d=0; //测量温度的小数部bit f=0; //测量温度的标志位,0’表示“正温度”‘1’表示“负温度”)bit f_max=0; //上限温度的标志位‘0’表示“正温度”‘1’表示“负温度”)bit f_min=0; //下限温度的标志位‘0’表示“正温度”、‘1’表示“负温度”)bit w=0; //报警标志位‘1’启动报警‘0’关闭报警)/*****************************延时子函数******************************/void ds18b20_delayus(uint t) //延时几μs{ while(t--);}void ds18b20_delayms(uint t) //延时1ms左右{ uint i,j; for(i=t;i>0;i--) for(j=120;j>0;j--);}/**************************ds18b20初始化函数*************************/void ds18b20_init() // DS18B20初始化{DQ=1; //拉高数据线DQ=0; //控制器向DS18B20发低电平脉冲ds18b20_delayus(30); //延时480μs左右DQ=1; //控制器拉高总线,while(DQ); //等待DS18B20拉低总线ds18b20_delayus(20); //延时,等待上拉电阻拉高总线DQ=1; //拉高数据线,准备数据传输;}/***************************ds18b20字节读函数************************/uchar ds18b20_read() //DS18B20 字节读取{uchar i; //定义一个局部变量i(局部变量只在本函数中有效)uchar d = 0; //定义一个局部变量dDQ = 1; //准备读;for(i=8;i>0;i--) //一位一位的读,循环8次{d >>= 1; //d左移一位,低位先发;DQ = 0;_nop_();_nop_();_nop_();DQ = 1; //必须写1,否则读出来的将是不预期的数据;if(DQ) //在12us处读取数据,送给d的最高位d |= 0x80;ds18b20_delayus(10);} return d; //返回读取的值}/*************************ds18b20字节写函数**************************/void ds18b20_write(uchar d) // ds18b20字节写{uchar i;for(i=8;i>0;i--) //一位一位的写{ DQ=0;_nop_(); _nop_();_nop_(); DQ=d&0x01; //写数据ds18b20_delayus(5); DQ=1; d >>= 1;}}/***************************获取温度函数****************************/void get_temperature(bit f){uchar a=0,b=0,c=0,d=0;uint i;ds18b20_init(); //DS18B20初始化ds18b20_write(0xcc);//向DS18B20发跳过读ROM命令ds18b20_write(0x44);//写启动DS18B20进行温度转换命令,转换结果存入内部RAMif(f==1){ //首次启动DS18B20进行温度转换需要500ms,若转换时间不够就出错,读出的是85度的错误值。
display1(1); //用开机动画耗时}elseds18b20_delayms(1);ds18b20_init(); //DS18B20初始化ds18b20_write(0xcc); //向DS18B20发跳过读ROM命令ds18b20_write(0xbe); //写读内部RAM中9字节的内容命令a=ds18b20_read(); //读内部RAM (LSB)b=ds18b20_read(); //读内部RAM (MSB)if(f==1) //局部位变量f=1时读上下线报警温度{max=ds18b20_read(); //读内部RAM (TH)min=ds18b20_read(); //读内部RAM (Tl)}if((max&0x80)==0x80) //若读取的上限温度的最高位(符号位)为‘1’表明是负温度{f_max=1;max=(max-0x80);} //将上限温度符号标志位置‘1’表示负温度,将上限温度装换成无符号数。
if((min&0x80)==0x80)//若读取的下限温度的最高位(符号位)为‘1’表明是负温度{f_min=1;min=(min-0x80);}//将下限温度符号标志位置‘1’表示负温度,将下限温度装换成无符号数。
i=b;i>>=4;if (i==0){f=0; //i为0,表示读取的温度是正温度,设立正温度标记temp=((a>>4)|(b<<4)); //整数部分a=(a&0x0f);temp_d=a; //小数部分}else{f=1; //i为1,表示读取的温度是负温度,设立负温度标记a=~a+1; //负数的小数部分取反加1b=~b; //负数的整数部分取反temp=((a>>4)|(b<<4)); //整数部分a=(a&0x0f); //小数部分temp_d=a;}}/*************************存储极限温度函数***************************/void store_t(){if(f_max==1) //若上限温度为负,将上限温度转换成有符号数(最高1是负,0是正)max=max+0x80;if(f_min==1) //若下限温度为负,将上限温度转换成有符号数min=min+0x80;ds18b20_init(); //DS18B20初始化ds18b20_write(0xcc); //向DS18B20发跳过读ROM命令ds18b20_write(0x4e); //向DS18B20发写字节至暂存器2和3(TH和TL)命令ds18b20_write(max); //向暂存器TH(上限温度暂存器)写温度ds18b20_write(min); //向暂存器TL(下限温度暂存器)写温度ds18b20_write(0xff); //向配置寄存器写命令,进行温度值分辨率设置ds18b20_init(); //DS18B20初始化ds18b20_write(0xcc); //向DS18B20发跳过读ROM命令ds18b20_write(0x48); //向DS18B20发将RAM中2、3字节的内容写入EEPROM} //DS18B20上电后会自动将EEPROM中的上下限温度拷贝到TH、TL暂存器/**************************温度超限报警函数*************************/void alarm(){ //若上限值是正值if(f_max==0){if(f_min==0) //若下限值是正值{if(f==0) //若测量值是正值{if((temp+temp_d*0.0625)<=min||(temp+temp_d*0.0625)>=max){w=1;TR1=1;} //当测量值小于最小值或大于最大值时报警if((temp+temp_d*0.0625)<max&&(temp+temp_d*0.0625)>min){w=0;} //当测量值大于最小值且小于最大值时不报警} if(f==1){w=1;TR1=1;} //若测量值是负值时报警}if(f_min==1) //若下限值是负值{ if(f==0) //若测量值是正值{if((temp+temp_d*0.0625)>=max)//当测量值大于最大值时报警{w=1;TR1=1;}if((temp+temp_d*0.0625)<max )//当测量值小于最大值时不报警{w=0;}}if(f==1) //若测量值是负值{ if((temp+temp_d*0.0625)>=min)//当测量值大于最小值时报警{w=1;TR1=1;}if((temp+temp_d*0.0625)<min)//当测量值小于最小值时不报警{w=0;}}}}if(f_max==1) //若下限值是负值{ if(f_min==1) //若下限值是负值{ if(f==1) //若测量值是负值{if((temp+temp_d*0.0625)<=max||(temp+temp_d*0.0625)>=min){w=1;TR1=1;} //当测量值小于最大值或大于最小值时报警if((temp+temp_d*0.0625)<min&&(temp+temp_d*0.0625)>max){w=0;} //当测量值小于最小值且大于最大值时不报警}if(f==0){w=1;TR1=1;} //若测量值是正值时报警}}}#endif/*********************************************************************** 程序名; __keyscan_H__* 功能:ds18b20键盘头文件,通过键盘设定设定上下限报警温度* 编程者:ZPZ* 编程时间:2009/10/2**********************************************************************/#ifndef __keyscan_H__ //定义头文件#define __keyscan_H__sbit key1=P2^2; //可位寻址变量定义,用key1表示P2.2口sbit key2=P2^1; //用key2表示P2.1口sbit key3=P2^0; //用key3表示P2.0口sbit key4=P3^3; //用key4表示P3.3口uchar i=0; //定义全局变量i用于不同功能模式的选择,‘0’正常模式,‘1’上限调节模式,‘2’下限调节模式uchar a=0; //定义全局变量a用于不同模式下数码管显示的选择bit k4=0; //K4按键双功能选择位,k4=0时K4按键选择消按键音的功能,k4=1时K4按键选择正负温度设定功能bit v=0; //K2、K3按键双功能选择位,v=0时选择上下限查看功能,v=1时选择上下限温度加减功能bit v1=0; //v1=1时定时1250ms时间到自动关闭报警上下限查看功能bit v2=0; //消按键音功能调整位,为‘0’时开按键音,为‘1’时关按键音/***************************读键盘延时子函数**************************/void keyscan_delay(uint z) //延时1ms左右{uint i,j;for(i=z;i>0;i--)for(j=120;j>0;j--);}/****************************温度调节函数******************************/int temp_change(int count,bit f) //上下限温度调整{if(key2==0) //判断K2是否按下{ if(v2==0)beer=0; //v2=0开按键音,否则消按键音keyscan_delay(10); //延时10msif(key2==0) //再次判断K2是否按下(实现按按键时消抖){beer=1; //K2按下关按键音if(f==0) //若温度为正{count++; //每按一下K2温度上调1if(a==1){if(count>125) count=125;}//当温度值大于125时不上调if(a==2){if(count>125) count=125;}}if(f!=0) //若温度为负{count++; //每按一下K2温度下调1if(a==1){if(count>55) count=55;}//当温度值小于-55时不再下调if(a==2){if(count>55) count=55;}}}while(key2==0); keyscan_delay(10); //K2松开按键时消抖}if(key3==0){if(v2==0)beer=0; keyscan_delay(10);if(key3==0) //K3按按键时消抖{beer=1;count--; //每按一下K3温度为正时下调1,为负时上调1if(a==1){if(count<0) count=0;}//当温度值达到0时不再调if(a==2){if(count<0) count=0;}}while(key3==0); keyscan_delay(10); //K3松开按键时消抖}return count;}/*****************************读键盘函数******************************/void keyscan(){ if(key1==0){if(v2==0) beer=0; keyscan_delay(10);if(key1==0) //K1按按键时消抖{beer=1;TR1=1;//开定时器1,通过s标志位的变化,实现在上下限温度调整时温度显示时闪烁的功能k4=1;//在上下温度调节功能模式下选择K4的调整上下限温度正负的功能v=1; //在上下温度调节功能模式下选择K2、K3的温度加减功能i++; //K1按一下i加1,i=‘0’进入正常模式,i=‘1’进入调上限模式,i=‘2’进入调下限模式if(i>2) //K1按下三次后退出调节模式{i=0; //进入正常模式TR1=0; //关定时器1k4=0; //在正常模式下选择K4的消按键音功能v=0; //在正常模式下选择K2、K3的查看上下限报警温度功能store_t(); //存储调整后的上下限报警温度}switch(i) //显示选择{case 0:a=0;break; //a=0选择显示测得的温度case 1:a=1;break; //a=1选择显示上限温度case 2:a=2;break; //a=2选择显示下限温度default:break;}}while(key1==0); //K1松按键时消抖keyscan_delay(10);}if(a==1&&v==1) //a=1选择显示上限温度且v=1时选择上下限温度加功能{led=0;max=temp_change(max,f_max);}//显示上限温度else if(a==2&&v==1) //a=2选择显示下限温度且v=1时选择上下限温度减功能{led=1;min=temp_change(min,f_min);}else;if(k4==1) //k4=1时K4按键选择正负温度设定功能{if(key4==0){if(v2==0)beer=0; keyscan_delay(5);if(key4==0){ beer=1;if(a==1){if(max>55) f_max=0;else f_max=~f_max;}//当温度大于55度时,只能设定为正温度if(a==2){if(min>55) f_max=0;else f_min=~f_min;}//当温度大于55度时,只能设定为正温度}while(key4==0); keyscan_delay(10);}}if(v==0) //v=0时选择上下限查看功能{if(key2==0){if(v2==0)beer=0; keyscan_delay(10);if(key2==0){beer=1;a=1; //选择上限显示TR1=1; //开定时器1开始定时一分钟左右s1=1; //上限显示不闪烁,显示一分钟左右自动退出}while(key2==0); keyscan_delay(10);}if(key3==0){if(v2==0)beer=0; keyscan_delay(10);if(key3==0){beer=1;a=2; //选择下限显示TR1=1; //开定时器1开始定时1ss1=1; //下限显示不闪烁,显示1s自动退出}while(key3==0); keyscan_delay(10);}if(v1==1) //v1=1时定时1s时间到自动关闭报警上下限查看功能{a=0;v1=0;TR1=0;} //a=0显示实测温度,v1清零,关定时器1if(k4==0) //k4=0时K4按键选择消按键音的功能{if(key4==0){if(v2==0)beer=0; keyscan_delay(10);if(key4==0){beer=1; v2=~v2; //为‘0’时开按键音,为‘1’时关按键音}while(key4==0);keyscan_delay(10);}}}}#endif/*********************************************************************** 程序名; __ds18b20_display_H__* 功能:ds18b20数码管动态显示头文件,通过定时器0延时实现数码管动态显示* 编程者:ZPZ* 编程时间:2009/10/2**********************************************************************/#ifndef __ds18b20_display_H__ //定义头文件#define __ds18b20_display_H__#define uint unsigned int //变量类型宏定义,用uint表示无符号整形(16位)#define uchar unsigned char //变量类型宏定义,用uchar表示无符号字符型(8位)sbit wei1=P2^4; //可位寻址变量定义,用wei1表示P2.4口sbit wei2=P2^5; //用wei2表示P2.5口sbit wei3=P2^6; //用wei3表示P2.6口sbit wei4=P2^7; //用wei4表示P2.7口uchar num=0; //定义num为全局无符号字符型变量,赋初值为‘0’uchar code temperature1[]={ 0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f}; //定义显示码表0~9uchar code temperature2[]={ 0xbf,0x86,0xdb,0xcf,0xe6,0xed,0xfd,0x87,0xff,0xef}; //带小数点的0.~9.uchar code temperature3[]={ 0x00,0x80,0x40,0x76,0x38}; //依次是‘不显示’‘.’‘-’‘H’‘L’/*****************************延时子函数******************************/void display_delay(uint t) //延时1ms左右{uint i,j;for(i=t;i>0;i--)for(j=120;j>0;j--);}/**************************定时器1初始化函数***************************/void timer1_init(bit t){TMOD=0x10; //设定定时器1工作在方式1,最大定时65.53ms TH0=0x3c; //定时器赋初值,定时50msTL0=0xb0;EA=1; //开总中断ET1=1; //开定时器1中断TR1=t; // 局部变量t为1启动定时器1,为0关闭定时器1 }/**************************定时器1中断函数*****************************/void timer1() interrupt 3{TH0=0x3c; //重新赋初值,定时50msTL0=0xb0;num++; //每进入一次定时器中断num加1(每50ms加1一次)if(num<5){s=1;if(w==1){beer=1;led=1;}else{beer=1;led=1;}}Else //进入4次中断,定时200ms时若报警标志位w为‘1’则启动报警,不为‘1’不启动//实现间歇性报警功能{s=0;if(w==1){beer=0;led=0;}else{beer=1;led=1;}}if(num>20) //进入20次中断,定时1s{num=0; //num归0,重新定开始定时1ss1=0; //定时1s时间到时自动关闭报警上下限显示功能v1=1; //定时1s时间到时自动关闭报警上下限查看功能}}/*********************调整报警上下限显示选择函数**********************/void selsct_1(uchar f,uchar k) //消除百位的0显示,及正负温度的显示选择{if(f==0) //若为正温度,百位为0则不显示百位,不为0则显示{if(k/100==0) P0=temperature3[0]; else P0=temperature1[k/100];}if(f==1) //若为负温度,若十位为0,百位不显示,否则百位显示‘-’{if(k%100/10==0) P0=temperature3[0]; else P0=temperature3[2];}}void selsct_2(bit f,uchar k) //消除十位的0显示,及正负温度的显示选择{if(f==0) //若为正温度,百位十位均为0则不显示十位,否则显示十位{ if((k/100==0)&&(k%100/10==0)) P0=temperature3[0];else P0=temperature1[k%100/10];}if(f==1) //若为负温度,若十位为0,十位不显示,否则十位显示‘-’{ if(k%100/10==0) P0=temperature3[2];else P0=temperature1[k%100/10];}}/****************************主显示函数********************************/void display(uchar t,uchar t_d) //用于实测温度、上限温度的显示{uchar i;for(i=0;i<4;i++) //依次从左至右选通数码管显示,实现动态显示{switch(i){case 0: //选通第一个数码管if(a==0){selsct_1(f,t);} //若a=0则在第一个数码管上显示测量温度的百位或‘-’if(a==1){P0=temperature3[3]; //若a=1则在第一个数码管上显示‘H’}if(a==2){P0=temperature3[4]; //若a=2则在第一个数码管上显示‘L’}wei2=0; //关第二个数码管wei3=0; //关第三个数码管wei4=0; //关第四个数码管wei1=1; //开第一个数码管break;case 1: //选通第二个数码管if(a==0){selsct_2(f,t);} //若a=0则在第二个数码管上显示测量温度的十位或‘-’if(a==1) //若a=1则在第二个数码管上显示上限报警温度的百位或‘-’{if(s==0) selsct_1(f_max,max);//若s=0则显示第二个数码管,否则不显示else P0=temperature3[0]; //通过s标志位的变化实现调节上下限报警温度时数码管的闪烁if(s1==1) selsct_1(f_max,max);//若s1=1则显示第二个数码管(s1标志位用于上下限查看时的显示)}if(a==2) //若a=2则在第二个数码管上显示下限报警温度的百位或‘-’{if(s==0) selsct_1(f_min,min);else P0=temperature3[0];if(s1==1) selsct_1(f_min,min);}wei1=0; wei3=0; wei4=0; wei2=1; break;case 2: //选通第三个数码管if(a==0){P0=temperature2[t%10];}//若a=0则在第三个数码管上显示测量温度的个位if(a==1) //若a=1则在第三个数码管上显示上限报警温度的十位或‘-’{if(s==0) selsct_2(f_max,max);//若s=0则显示第三个数码管,否则不显示else P0=temperature3[0];if(s1==1) selsct_2(f_max,max);//若s1=1则显示第三个数码管}if(a==2) //若a=2则在第三个数码管上显示下限报警温度的十位或‘-’{if(s==0) selsct_2(f_min,min);else P0=temperature3[0];if(s1==1) selsct_2(f_min,min);}wei1=0; wei2=0; wei4=0; wei3=1; break;case 3: //选通第四个数码管if(a==0){P0=temperature1[t_d];}//若a=0则在第四个数码管上显示测量温度的小数位if(a==1) //若a=1则在第四个数码管上显示上限报警温度的个位{if(s==0) P0=temperature1[max%10];//若s=0则显示第四个数码管,否则不显示else P0=temperature3[0];if(s1==1) P0=temperature1[max%10];//若s1=1则显示第四个数码管}if(a==2) //若a=2则在第四个数码管上显示下限报警温度的个位{if(s==0) P0=temperature1[min%10];else P0=temperature3[0];if(s1==1) P0=temperature1[min%10];}wei1=0; wei2=0; wei3=0; wei4=1; break;}display_delay(3); //每个数码管显示3ms左右}}/****************************开机显示函数******************************/ void display1(uint z) //用于开机动画的显示{uchar i,j;bit f=0;for(i=0;i<z;i++) //‘z’是显示遍数的设定{for(j=0;j<4;j++) //依次从左至右显示‘-’{switch(j){case 0:P0=temperature3[2];//第一个数码管显示wei2=0; wei3=0; wei4=0; wei1=1; break;case 1:P0=temperature3[2];//第二个数码管显示wei1=0; wei3=0; wei4=0; wei2=1; break;case 2:P0=temperature3[2];//第三个数码管显示wei1=0; wei2=0; wei4=0; wei3=1; break;case 3:P0=temperature3[2];//第四个数码管显示wei1=0; wei2=0; wei3=0; wei4=1; break;}display_delay(200); //每个数码管显示200ms左右}}}#endif。