K.Pack. Automated false track identication in Proc
LTE信令流程详解
L T E信令流程详解集团标准化工作小组 #Q8QGGQT-GX8G08Q8-GNQGJ8-MHHGN#LTE信令流程目录概述本文通过对重要概念的阐述,为信令流程的解析做铺垫,随后讲解LTE中重要信令流程,让大家熟悉各个物理过程是如何实现的,其次通过异常信令的解读让大家增强对异常信令流程的判断,再次对系统消息的解析,让大家了解系统消息的特点和携带的内容。
最后通过实测信令内容讲解,说明消息的重要信元字段。
第一章协议层与概念1.1控制面与用户面在无线通信系统中,负责传送和处理用户数据流工作的协议称为用户面;负责传送和处理系统协调信令的协议称为控制面。
用户面如同负责搬运的码头工人,控制面就相当于指挥员,当两个层面不分离时,自己既负责搬运又负责指挥,这种情况不利于大货物处理,因此分工独立后,办事效率可成倍提升,在LTE网络中,用户面和控制面已明确分离开。
1.2接口与协议接口是指不同网元之间的信息交互时的节点,每个接口含有不同的协议,同一接口的网元之间使用相互明白的语言进行信息交互,称为接口协议,接口协议的架构称为协议栈。
在LTE中有空中接口和地面接口,相应也有对应的协议和协议栈。
信令流数据流图1 子层、协议栈与流图2 子层运行方式LTE系统的数据处理过程被分解成不同的协议层。
简单分为三层结构:物理层、数据链路层L2和网络层。
图1阐述了LTE系统传输的总体协议架构以及用户面和控制面数据信息的路径和流向。
用户数据流和信令流以IP包的形式进行传送,在空中接口传送之前,IP包将通过多个协议层实体进行处理,到达eNodeB后,经过协议层逆向处理,再通过S1/X2接口分别流向不同的EPS实体,路径中各协议子层特点和功能如下:1.2.1NAS协议(非接入层协议)处理UE和MME之间信息的传输,传输的内容可以是用户信息或控制信息(如业务的建立、释放或者移动性管理信息)。
它与接入信息无关,只是通过接入层的信令交互,在UE和MME之间建立起了信令通路,从而便能进行非接入层信令流程了。
卡巴斯基安全中心事件追踪器集成指南说明书

Integrate Kaspersky Security Center EventTracker v9.0 and aboveAbstractThis guide will facilitate a Kaspersky Security Center user to send logs to EventTracker.ScopeThe configurations detailed in this guide are consistent with EventTracker 9.x or later and Kaspersky Security Center 10.AudienceAdministrators who want to monitor the Kaspersky Security Center using EventTracker.The information contained in this document represents the current view of Netsurion on theissues discussed as of the date of publication. Because Netsurion must respond to changingmarket conditions, it should not be interpreted to be a commitment on the part of Netsurion, andNetsurion cannot guarantee the accuracy of any information presented after the date ofpublication.This document is for informational purposes only. Netsurion MAKES NO WARRANTIES, EXPRESSOR IMPLIED, AS TO THE INFORMATION IN THIS DOCUMENT.Complying with all applicable copyright laws is the responsibility of the user. Without limiting therights under copyright, this paper may be freely distributed without permission from Netsurion, ifits content is unaltered, nothing is added to the content and credit to Netsurion is provided.Netsurion may have patents, patent applications, trademarks, copyrights, or other intellectualproperty rights covering subject matter in this document. Except as expressly provided in anywritten license agreement from Netsurion, the furnishing of this document does not give you anylicense to these patents, trademarks, copyrights, or other intellectual property.The example companies, organizations, products, people and events depicted herein are fictitious.No association with any real company, organization, product, person or event is intended orshould be inferred.© 2019 Netsurion. All rights reserved. The names of actual companies and products mentionedherein may be the trademarks of their respective owners.Table of Contents1.Introduction (3)1.1.Pre-requisites (3)1.2.Enabling Kaspersky Event Logs and Sending logs to EventTracker (3)2.EventTracker Knowledge Pack (6)2.1.Categories (6)2.2.Alerts (7)2.3.Report (7)3.Importing Kaspersky Security Center knowledge pack into EventTracker (9)3.1.Category (9)3.2.Alerts (10)3.3.Flex Reports (11)3.4.Token Templates (12)4.Verifying Kaspersky Security Center knowledge pack in EventTracker (15)4.1.Categories (15)4.2.Alerts (15)4.3.Reports (16)4.4.Token Template (17)5.Sample Dashboards (18)1.I ntroductionKaspersky Lab offers consumer security products, such as anti-virus, anti-malware and firewall applications, in addition to security systems designed for small businesses, corporations and large enterprises. Corporate solutions include protection for workstations, file servers, mail servers, payment gateways, banking servers, mobile devices, and internet gateways managed through a centralized administration kit. These applications are also available in bundled security suites scaled to fit the requirements of organizations of varying sizes. 1.1.Pre-requisites•EventTracker 9.x or later should be installed.•EventTracker Agent to be installed on Kaspersky Security Center administrative server.•Advance licensed Kaspersky is required to forward the syslog.1.2.Enabling Kaspersky Event Logs and Sending logs to EventTracker1.Open Kaspersky Security Center 10 and go to Administration Server.Figure 12.In Admin Administration Server, select Events in the right frame.3.Click on Configure notifications and event export.Figure 24.Select Configure export to the SIEM system.Figure 35.Select the check box Automatically export events to the SIEM system database.Figure 46.Choose the SIEM system. Specify the EventTracker Manager address.7.Click OK.Figure 52.E ventTracker Knowledge PackOnce Kaspersky Security Center events are enabled and Kaspersky Security Center events are received in EventTracker, Alerts, and Reports can be configured in EventTracker.The following Knowledge Packs are available in EventTracker to support the Kaspersky Security Center monitoring.2.1.Categories•Kaspersky Security Center: Report management: This category provides information related to report management when a report is added, deleted or modified on Kaspersky Security Center.•Kaspersky Security Center: Task management: This category provides information related to task management when a task is added, deleted or modified on Kaspersky Security Center.•Kaspersky Security Center: Policy management: This category provides information related to policy management when a policy is added, deleted or modified on Kaspersky Security Center.•Kaspersky Security Center: Group task management: This category provides information related to group task management when a group task is added, deleted or modified on Kaspersky Security Center.•Kaspersky Security Center: Administrative group management: This category provides information related to administrative group management when an administrative group is added, deleted or modified on Kaspersky Security Center.•Kaspersky Security Center: Malicious object scan status: This category provides information related to the malicious object which has been detected and untreated on Kaspersky Security Center.•Kaspersky Security Center: Application privilege management: This category provides information related to applications that have been added to the trusted group on Kaspersky Security Center.•Kaspersky Security Center: Application settings change: This category provides information related to applications where their settings are changed on Kaspersky Security Center.•Kaspersky Security Center: Blocked files: This category provides information related to files which are being blocked by Kaspersky Security Center.•Kaspersky Security Center: Device Control:This category provides information related to devices which have been blocked when inserted into the Kaspersky Security Center system.•Kaspersky Security Center: Malware detected:This category provides information related to malwares which have been detected in the system of Kaspersky Security Center.•Kaspersky Security Center: Object quarantine:This category provides information related to malware objects which are added into the quarantine list in Kaspersky Security Center.•Kaspersky Security Center: Task management:This category provides information related to task management of Kaspersky Security Center.•Kaspersky Security Center: Vulnerability detected: This category provides information related to a vulnerability which has been detected in Kaspersky Security Center.2.2.Alerts•Kaspersky Security Center: Attack Detected: This alert is generated when an Alert is detected in the Kaspersky Security Center.•Kaspersky Security Center: Suspicious Object Found: This alert is generated when a malicious/Suspicious object is detected in Kaspersky Security Center.•Kaspersky Security Center: Virus Found: This Alert is generated when one of the files or web Viruses is detected in the Kaspersky Security Center.2.3.Report•Kaspersky Security Center- Suspicious Object Found: This report provides information related to malware detected in the web for which the user tries to access an unidentified object.Logs consideredJan 14 05:04:28 ccc-app9CEF:0|KasperskyLab|SecurityCenter|10.3.407|GNRL_EV_SUSPICIOUS_OBJECT_FOUND|Probably infected object detected|4|msg=Result: Detected: not-a-virus:WebToolbar.Win32.Asparnet.gen\r\nUser:CCCNTR\\CCC5055$ (Initiator)\r\nObject: C:\\Program Files(x86)\\askpartnernetwork\\toolbar\\updater\\tbnotifier.exe\r\n rt=1547463838 dhost=CCC5055dst=192.168.6.242 cs2=KES cs2Label=ProductName cs3=10.2.4.0 cs3Label=ProductVersionfilePath=C:\Program Files (x86)\AskPartnerNetwork\Toolbar\Updater\TBNotifier.exe cs1=not-a-virus:WebToolbar.Win32.Asparnet.gen cs1Label=VirusName duser=CCCNTR\CCC5055$Sample Report•Kaspersky Security Center-Task Status Updated: This report provides information related to task management where the task is started or stopped.Logs consideredJan 14 05:07:58 ccc-app9CEF:0|KasperskyLab|SecurityCenter|10.3.407|KLPRCI_TaskState|Completed|1|rt=1547464052 dhost=CCC-RD-HOST11 dst=192.168.0.101 cs2=WSEE cs2Label=ProductName cs3=10.0.0.0 cs3Label=ProductVersioncs5=Server Database Update cs5Label=TaskName cs4=204 cs4Label=TaskId cn2=4 cn2Label=TaskNewState cn1=1 cn1Label=TaskOldStateSample Report3.I mporting Kaspersky Security Center knowledge pack into EventTrackerunch the EventTracker Control Panel.2.Double click Export Import Utility, and then click the Import tab.Import Token Templates/Category/Alert/Tokens/ Flex Reports as given below.Note: Importing should be in the same order as mentioned above.Figure 63.1.Category1.Click the Category option, and then click the browse button.Figure 72.Locate All Kaspersky Security Center group of Categories.iscat file, and then click the Open button.3.To import categories, click the Import button.EventTracker displays a success message.Figure 84.Click OK, and then click the Close button.3.2.Alerts1.Click Alerts option, and then click the browse button.Figure 92.Locate All Kaspersky Security Center group of Alerts.isalt file, and then click the Open button.3.To import alerts, click the Import button.EventTracker displays a success message.Figure 104.Click OK, and then click the Close button.3.3.Flex Reports1.Click the Report option, and then click the browse button.Figure 112.Locate All Kaspersky Security Center group of Flex Report.issch file, and then click the Open button.3.To import reports, click the Import button.EventTracker displays a success message.Figure 124.Click OK, and then click the Close button.3.4.Token Templates1.Click the Admin menu, and then click Parsing rule.2.Select the Template tab, and then click on ‘Import’ option.Figure 133.Click on the Browse button.Figure 144.Locate All Kaspersky Security Center group of template.ettd file, and then click the Open button.Figure 155.Now select the check box and then click on ‘Import’ option.EventTracker displays a success message.Figure 166.Click on the OK button.4.V erifying Kaspersky Security Center knowledge pack in EventTracker4.1.Categories1.Logon to EventTracker.2.Click the Admin menu, and then click Categories.3.In Category Tree to view imported categories, scroll down and expand the Kaspersky Security Centergroup folder to view the imported categories.Figure 174.2.Alerts1.Logon to EventTracker.2.Click the Admin menu, and then click Alerts.3.In the Search field, type ‘Kaspersky Security Center', and then click the Go button.Alert Management page will display all the imported Kaspersky Security Center alerts.Figure 184.To activate the imported alerts, select the respective checkbox in the Active column.EventTracker displays a message box.Figure 195.Click OK, and then click the Activate Now button.NOTE:You can select alert notification such as Email, and Message, etc. For this, select the respective checkbox in the Alert management page, and then click the Activate Now button.4.3.Reports1.Logon to EventTracker.2.Click the Reports menu, and then select Configuration.3.In Reports Configuration pane, select the Defined option.EventTracker displays the Defined page.4.In search box enter ‘Kaspersky Security Center’, and then click the Search button.EventTracker displays Flex reports of Kaspersky Security Center.Figure 204.4.Token Template1.Logon to EventTracker.2.Click the Admin menu, and then click Parsing Rules.Figure 215.S ample Dashboards•Kaspersky Security Center- Suspicious object Found by HostFigure 22 •Kaspersky Security Center- Suspicious object Found on IP AddressFigure 23•Kaspersky Security Center- Suspicious object Found by ThreatFigure 24 •Kaspersky Security Center- Suspicious object Found by userFigure 25•Kaspersky Security Center- Suspicious object Found by Task StatusFigure 26 •Kaspersky Security Center- Suspicious object Found by SystemFigure 2720。
Native Instruments MASCHINE MK3 用户手册说明书

The information in this document is subject to change without notice and does not represent a commitment on the part of Native Instruments GmbH. The software described by this docu-ment is subject to a License Agreement and may not be copied to other media. No part of this publication may be copied, reproduced or otherwise transmitted or recorded, for any purpose, without prior written permission by Native Instruments GmbH, hereinafter referred to as Native Instruments.“Native Instruments”, “NI” and associated logos are (registered) trademarks of Native Instru-ments GmbH.ASIO, VST, HALion and Cubase are registered trademarks of Steinberg Media Technologies GmbH.All other product and company names are trademarks™ or registered® trademarks of their re-spective holders. Use of them does not imply any affiliation with or endorsement by them.Document authored by: David Gover and Nico Sidi.Software version: 2.8 (02/2019)Hardware version: MASCHINE MK3Special thanks to the Beta Test Team, who were invaluable not just in tracking down bugs, but in making this a better product.NATIVE INSTRUMENTS GmbH Schlesische Str. 29-30D-10997 Berlin Germanywww.native-instruments.de NATIVE INSTRUMENTS North America, Inc. 6725 Sunset Boulevard5th FloorLos Angeles, CA 90028USANATIVE INSTRUMENTS K.K.YO Building 3FJingumae 6-7-15, Shibuya-ku, Tokyo 150-0001Japanwww.native-instruments.co.jp NATIVE INSTRUMENTS UK Limited 18 Phipp StreetLondon EC2A 4NUUKNATIVE INSTRUMENTS FRANCE SARL 113 Rue Saint-Maur75011 ParisFrance SHENZHEN NATIVE INSTRUMENTS COMPANY Limited 5F, Shenzhen Zimao Center111 Taizi Road, Nanshan District, Shenzhen, GuangdongChina© NATIVE INSTRUMENTS GmbH, 2019. All rights reserved.Table of Contents1Welcome to MASCHINE (25)1.1MASCHINE Documentation (26)1.2Document Conventions (27)1.3New Features in MASCHINE 2.8 (29)1.4New Features in MASCHINE 2.7.10 (31)1.5New Features in MASCHINE 2.7.8 (31)1.6New Features in MASCHINE 2.7.7 (32)1.7New Features in MASCHINE 2.7.4 (33)1.8New Features in MASCHINE 2.7.3 (36)2Quick Reference (38)2.1Using Your Controller (38)2.1.1Controller Modes and Mode Pinning (38)2.1.2Controlling the Software Views from Your Controller (40)2.2MASCHINE Project Overview (43)2.2.1Sound Content (44)2.2.2Arrangement (45)2.3MASCHINE Hardware Overview (48)2.3.1MASCHINE Hardware Overview (48)2.3.1.1Control Section (50)2.3.1.2Edit Section (53)2.3.1.3Performance Section (54)2.3.1.4Group Section (56)2.3.1.5Transport Section (56)2.3.1.6Pad Section (58)2.3.1.7Rear Panel (63)2.4MASCHINE Software Overview (65)2.4.1Header (66)2.4.2Browser (68)2.4.3Arranger (70)2.4.4Control Area (73)2.4.5Pattern Editor (74)3Basic Concepts (76)3.1Important Names and Concepts (76)3.2Adjusting the MASCHINE User Interface (79)3.2.1Adjusting the Size of the Interface (79)3.2.2Switching between Ideas View and Song View (80)3.2.3Showing/Hiding the Browser (81)3.2.4Showing/Hiding the Control Lane (81)3.3Common Operations (82)3.3.1Using the 4-Directional Push Encoder (82)3.3.2Pinning a Mode on the Controller (83)3.3.3Adjusting Volume, Swing, and Tempo (84)3.3.4Undo/Redo (87)3.3.5List Overlay for Selectors (89)3.3.6Zoom and Scroll Overlays (90)3.3.7Focusing on a Group or a Sound (91)3.3.8Switching Between the Master, Group, and Sound Level (96)3.3.9Navigating Channel Properties, Plug-ins, and Parameter Pages in the Control Area.973.3.9.1Extended Navigate Mode on Your Controller (102)3.3.10Navigating the Software Using the Controller (105)3.3.11Using Two or More Hardware Controllers (106)3.3.12Touch Auto-Write Option (108)3.4Native Kontrol Standard (110)3.5Stand-Alone and Plug-in Mode (111)3.5.1Differences between Stand-Alone and Plug-in Mode (112)3.5.2Switching Instances (113)3.5.3Controlling Various Instances with Different Controllers (114)3.6Host Integration (114)3.6.1Setting up Host Integration (115)3.6.1.1Setting up Ableton Live (macOS) (115)3.6.1.2Setting up Ableton Live (Windows) (116)3.6.1.3Setting up Apple Logic Pro X (116)3.6.2Integration with Ableton Live (117)3.6.3Integration with Apple Logic Pro X (119)3.7Preferences (120)3.7.1Preferences – General Page (121)3.7.2Preferences – Audio Page (126)3.7.3Preferences – MIDI Page (130)3.7.4Preferences – Default Page (133)3.7.5Preferences – Library Page (137)3.7.6Preferences – Plug-ins Page (145)3.7.7Preferences – Hardware Page (150)3.7.8Preferences – Colors Page (154)3.8Integrating MASCHINE into a MIDI Setup (156)3.8.1Connecting External MIDI Equipment (156)3.8.2Sync to External MIDI Clock (157)3.8.3Send MIDI Clock (158)3.9Syncing MASCHINE using Ableton Link (159)3.9.1Connecting to a Network (159)3.9.2Joining and Leaving a Link Session (159)3.10Using a Pedal with the MASCHINE Controller (160)3.11File Management on the MASCHINE Controller (161)4Browser (163)4.1Browser Basics (163)4.1.1The MASCHINE Library (163)4.1.2Browsing the Library vs. Browsing Your Hard Disks (164)4.2Searching and Loading Files from the Library (165)4.2.1Overview of the Library Pane (165)4.2.2Selecting or Loading a Product and Selecting a Bank from the Browser (170)4.2.2.1[MK3] Browsing by Product Category Using the Controller (174)4.2.2.2[MK3] Browsing by Product Vendor Using the Controller (174)4.2.3Selecting a Product Category, a Product, a Bank, and a Sub-Bank (175)4.2.3.1Selecting a Product Category, a Product, a Bank, and a Sub-Bank on theController (179)4.2.4Selecting a File Type (180)4.2.5Choosing Between Factory and User Content (181)4.2.6Selecting Type and Character Tags (182)4.2.7List and Tag Overlays in the Browser (186)4.2.8Performing a Text Search (188)4.2.9Loading a File from the Result List (188)4.3Additional Browsing Tools (193)4.3.1Loading the Selected Files Automatically (193)4.3.2Auditioning Instrument Presets (195)4.3.3Auditioning Samples (196)4.3.4Loading Groups with Patterns (197)4.3.5Loading Groups with Routing (198)4.3.6Displaying File Information (198)4.4Using Favorites in the Browser (199)4.5Editing the Files’ Tags and Properties (203)4.5.1Attribute Editor Basics (203)4.5.2The Bank Page (205)4.5.3The Types and Characters Pages (205)4.5.4The Properties Page (208)4.6Loading and Importing Files from Your File System (209)4.6.1Overview of the FILES Pane (209)4.6.2Using Favorites (211)4.6.3Using the Location Bar (212)4.6.4Navigating to Recent Locations (213)4.6.5Using the Result List (214)4.6.6Importing Files to the MASCHINE Library (217)4.7Locating Missing Samples (219)4.8Using Quick Browse (221)5Managing Sounds, Groups, and Your Project (225)5.1Overview of the Sounds, Groups, and Master (225)5.1.1The Sound, Group, and Master Channels (226)5.1.2Similarities and Differences in Handling Sounds and Groups (227)5.1.3Selecting Multiple Sounds or Groups (228)5.2Managing Sounds (233)5.2.1Loading Sounds (235)5.2.2Pre-listening to Sounds (236)5.2.3Renaming Sound Slots (237)5.2.4Changing the Sound’s Color (237)5.2.5Saving Sounds (239)5.2.6Copying and Pasting Sounds (241)5.2.7Moving Sounds (244)5.2.8Resetting Sound Slots (245)5.3Managing Groups (247)5.3.1Creating Groups (248)5.3.2Loading Groups (249)5.3.3Renaming Groups (251)5.3.4Changing the Group’s Color (251)5.3.5Saving Groups (253)5.3.6Copying and Pasting Groups (255)5.3.7Reordering Groups (258)5.3.8Deleting Groups (259)5.4Exporting MASCHINE Objects and Audio (260)5.4.1Saving a Group with its Samples (261)5.4.2Saving a Project with its Samples (262)5.4.3Exporting Audio (264)5.5Importing Third-Party File Formats (270)5.5.1Loading REX Files into Sound Slots (270)5.5.2Importing MPC Programs to Groups (271)6Playing on the Controller (275)6.1Adjusting the Pads (275)6.1.1The Pad View in the Software (275)6.1.2Choosing a Pad Input Mode (277)6.1.3Adjusting the Base Key (280)6.1.4Using Choke Groups (282)6.1.5Using Link Groups (284)6.2Adjusting the Key, Choke, and Link Parameters for Multiple Sounds (286)6.3Playing Tools (287)6.3.1Mute and Solo (288)6.3.2Choke All Notes (292)6.3.3Groove (293)6.3.4Level, Tempo, Tune, and Groove Shortcuts on Your Controller (295)6.3.5Tap Tempo (299)6.4Performance Features (300)6.4.1Overview of the Perform Features (300)6.4.2Selecting a Scale and Creating Chords (303)6.4.3Scale and Chord Parameters (303)6.4.4Creating Arpeggios and Repeated Notes (316)6.4.5Swing on Note Repeat / Arp Output (321)6.5Using Lock Snapshots (322)6.5.1Creating a Lock Snapshot (322)6.5.2Using Extended Lock (323)6.5.3Updating a Lock Snapshot (323)6.5.4Recalling a Lock Snapshot (324)6.5.5Morphing Between Lock Snapshots (324)6.5.6Deleting a Lock Snapshot (325)6.5.7Triggering Lock Snapshots via MIDI (326)6.6Using the Smart Strip (327)6.6.1Pitch Mode (328)6.6.2Modulation Mode (328)6.6.3Perform Mode (328)6.6.4Notes Mode (329)7Working with Plug-ins (330)7.1Plug-in Overview (330)7.1.1Plug-in Basics (330)7.1.2First Plug-in Slot of Sounds: Choosing the Sound’s Role (334)7.1.3Loading, Removing, and Replacing a Plug-in (335)7.1.3.1Browser Plug-in Slot Selection (341)7.1.4Adjusting the Plug-in Parameters (344)7.1.5Bypassing Plug-in Slots (344)7.1.6Using Side-Chain (346)7.1.7Moving Plug-ins (346)7.1.8Alternative: the Plug-in Strip (348)7.1.9Saving and Recalling Plug-in Presets (348)7.1.9.1Saving Plug-in Presets (349)7.1.9.2Recalling Plug-in Presets (350)7.1.9.3Removing a Default Plug-in Preset (351)7.2The Sampler Plug-in (352)7.2.1Page 1: Voice Settings / Engine (354)7.2.2Page 2: Pitch / Envelope (356)7.2.3Page 3: FX / Filter (359)7.2.4Page 4: Modulation (361)7.2.5Page 5: LFO (363)7.2.6Page 6: Velocity / Modwheel (365)7.3Using Native Instruments and External Plug-ins (367)7.3.1Opening/Closing Plug-in Windows (367)7.3.2Using the VST/AU Plug-in Parameters (370)7.3.3Setting Up Your Own Parameter Pages (371)7.3.4Using VST/AU Plug-in Presets (376)7.3.5Multiple-Output Plug-ins and Multitimbral Plug-ins (378)8Using the Audio Plug-in (380)8.1Loading a Loop into the Audio Plug-in (384)8.2Editing Audio in the Audio Plug-in (385)8.3Using Loop Mode (386)8.4Using Gate Mode (388)9Using the Drumsynths (390)9.1Drumsynths – General Handling (391)9.1.1Engines: Many Different Drums per Drumsynth (391)9.1.2Common Parameter Organization (391)9.1.3Shared Parameters (394)9.1.4Various Velocity Responses (394)9.1.5Pitch Range, Tuning, and MIDI Notes (394)9.2The Kicks (395)9.2.1Kick – Sub (397)9.2.2Kick – Tronic (399)9.2.3Kick – Dusty (402)9.2.4Kick – Grit (403)9.2.5Kick – Rasper (406)9.2.6Kick – Snappy (407)9.2.7Kick – Bold (409)9.2.8Kick – Maple (411)9.2.9Kick – Push (412)9.3The Snares (414)9.3.1Snare – Volt (416)9.3.2Snare – Bit (418)9.3.3Snare – Pow (420)9.3.4Snare – Sharp (421)9.3.5Snare – Airy (423)9.3.6Snare – Vintage (425)9.3.7Snare – Chrome (427)9.3.8Snare – Iron (429)9.3.9Snare – Clap (431)9.3.10Snare – Breaker (433)9.4The Hi-hats (435)9.4.1Hi-hat – Silver (436)9.4.2Hi-hat – Circuit (438)9.4.3Hi-hat – Memory (440)9.4.4Hi-hat – Hybrid (442)9.4.5Creating a Pattern with Closed and Open Hi-hats (444)9.5The Toms (445)9.5.1Tom – Tronic (447)9.5.2Tom – Fractal (449)9.5.3Tom – Floor (453)9.5.4Tom – High (455)9.6The Percussions (456)9.6.1Percussion – Fractal (458)9.6.2Percussion – Kettle (461)9.6.3Percussion – Shaker (463)9.7The Cymbals (467)9.7.1Cymbal – Crash (469)9.7.2Cymbal – Ride (471)10Using the Bass Synth (474)10.1Bass Synth – General Handling (475)10.1.1Parameter Organization (475)10.1.2Bass Synth Parameters (477)11Working with Patterns (479)11.1Pattern Basics (479)11.1.1Pattern Editor Overview (480)11.1.2Navigating the Event Area (486)11.1.3Following the Playback Position in the Pattern (488)11.1.4Jumping to Another Playback Position in the Pattern (489)11.1.5Group View and Keyboard View (491)11.1.6Adjusting the Arrange Grid and the Pattern Length (493)11.1.7Adjusting the Step Grid and the Nudge Grid (497)11.2Recording Patterns in Real Time (501)11.2.1Recording Your Patterns Live (501)11.2.2The Record Prepare Mode (504)11.2.3Using the Metronome (505)11.2.4Recording with Count-in (506)11.2.5Quantizing while Recording (508)11.3Recording Patterns with the Step Sequencer (508)11.3.1Step Mode Basics (508)11.3.2Editing Events in Step Mode (511)11.3.3Recording Modulation in Step Mode (513)11.4Editing Events (514)11.4.1Editing Events with the Mouse: an Overview (514)11.4.2Creating Events/Notes (517)11.4.3Selecting Events/Notes (518)11.4.4Editing Selected Events/Notes (526)11.4.5Deleting Events/Notes (532)11.4.6Cut, Copy, and Paste Events/Notes (535)11.4.7Quantizing Events/Notes (538)11.4.8Quantization While Playing (540)11.4.9Doubling a Pattern (541)11.4.10Adding Variation to Patterns (541)11.5Recording and Editing Modulation (546)11.5.1Which Parameters Are Modulatable? (547)11.5.2Recording Modulation (548)11.5.3Creating and Editing Modulation in the Control Lane (550)11.6Creating MIDI Tracks from Scratch in MASCHINE (555)11.7Managing Patterns (557)11.7.1The Pattern Manager and Pattern Mode (558)11.7.2Selecting Patterns and Pattern Banks (560)11.7.3Creating Patterns (563)11.7.4Deleting Patterns (565)11.7.5Creating and Deleting Pattern Banks (566)11.7.6Naming Patterns (568)11.7.7Changing the Pattern’s Color (570)11.7.8Duplicating, Copying, and Pasting Patterns (571)11.7.9Moving Patterns (574)11.7.10Adjusting Pattern Length in Fine Increments (575)11.8Importing/Exporting Audio and MIDI to/from Patterns (576)11.8.1Exporting Audio from Patterns (576)11.8.2Exporting MIDI from Patterns (577)11.8.3Importing MIDI to Patterns (580)12Audio Routing, Remote Control, and Macro Controls (589)12.1Audio Routing in MASCHINE (590)12.1.1Sending External Audio to Sounds (591)12.1.2Configuring the Main Output of Sounds and Groups (596)12.1.3Setting Up Auxiliary Outputs for Sounds and Groups (601)12.1.4Configuring the Master and Cue Outputs of MASCHINE (605)12.1.5Mono Audio Inputs (610)12.1.5.1Configuring External Inputs for Sounds in Mix View (611)12.2Using MIDI Control and Host Automation (614)12.2.1Triggering Sounds via MIDI Notes (615)12.2.2Triggering Scenes via MIDI (622)12.2.3Controlling Parameters via MIDI and Host Automation (623)12.2.4Selecting VST/AU Plug-in Presets via MIDI Program Change (631)12.2.5Sending MIDI from Sounds (632)12.3Creating Custom Sets of Parameters with the Macro Controls (636)12.3.1Macro Control Overview (637)12.3.2Assigning Macro Controls Using the Software (638)12.3.3Assigning Macro Controls Using the Controller (644)13Controlling Your Mix (646)13.1Mix View Basics (646)13.1.1Switching between Arrange View and Mix View (646)13.1.2Mix View Elements (647)13.2The Mixer (649)13.2.1Displaying Groups vs. Displaying Sounds (650)13.2.2Adjusting the Mixer Layout (652)13.2.3Selecting Channel Strips (653)13.2.4Managing Your Channels in the Mixer (654)13.2.5Adjusting Settings in the Channel Strips (656)13.2.6Using the Cue Bus (660)13.3The Plug-in Chain (662)13.4The Plug-in Strip (663)13.4.1The Plug-in Header (665)13.4.2Panels for Drumsynths and Internal Effects (667)13.4.3Panel for the Sampler (668)13.4.4Custom Panels for Native Instruments Plug-ins (671)13.4.5Undocking a Plug-in Panel (Native Instruments and External Plug-ins Only) (675)13.5Controlling Your Mix from the Controller (677)13.5.1Navigating Your Channels in Mix Mode (678)13.5.2Adjusting the Level and Pan in Mix Mode (679)13.5.3Mute and Solo in Mix Mode (680)13.5.4Plug-in Icons in Mix Mode (680)14Using Effects (681)14.1Applying Effects to a Sound, a Group or the Master (681)14.1.1Adding an Effect (681)14.1.2Other Operations on Effects (690)14.1.3Using the Side-Chain Input (692)14.2Applying Effects to External Audio (695)14.2.1Step 1: Configure MASCHINE Audio Inputs (695)14.2.2Step 2: Set up a Sound to Receive the External Input (698)14.2.3Step 3: Load an Effect to Process an Input (700)14.3Creating a Send Effect (701)14.3.1Step 1: Set Up a Sound or Group as Send Effect (702)14.3.2Step 2: Route Audio to the Send Effect (706)14.3.3 A Few Notes on Send Effects (708)14.4Creating Multi-Effects (709)15Effect Reference (712)15.1Dynamics (713)15.1.1Compressor (713)15.1.2Gate (717)15.1.3Transient Master (721)15.1.4Limiter (723)15.1.5Maximizer (727)15.2Filtering Effects (730)15.2.1EQ (730)15.2.2Filter (733)15.2.3Cabinet (737)15.3Modulation Effects (738)15.3.1Chorus (738)15.3.2Flanger (740)15.3.3FM (742)15.3.4Freq Shifter (743)15.3.5Phaser (745)15.4Spatial and Reverb Effects (747)15.4.1Ice (747)15.4.2Metaverb (749)15.4.3Reflex (750)15.4.4Reverb (Legacy) (752)15.4.5Reverb (754)15.4.5.1Reverb Room (754)15.4.5.2Reverb Hall (757)15.4.5.3Plate Reverb (760)15.5Delays (762)15.5.1Beat Delay (762)15.5.2Grain Delay (765)15.5.3Grain Stretch (767)15.5.4Resochord (769)15.6Distortion Effects (771)15.6.1Distortion (771)15.6.2Lofi (774)15.6.3Saturator (775)15.7Perform FX (779)15.7.1Filter (780)15.7.2Flanger (782)15.7.3Burst Echo (785)15.7.4Reso Echo (787)15.7.5Ring (790)15.7.6Stutter (792)15.7.7Tremolo (795)15.7.8Scratcher (798)16Working with the Arranger (801)16.1Arranger Basics (801)16.1.1Navigating Song View (804)16.1.2Following the Playback Position in Your Project (806)16.1.3Performing with Scenes and Sections using the Pads (807)16.2Using Ideas View (811)16.2.1Scene Overview (811)16.2.2Creating Scenes (813)16.2.3Assigning and Removing Patterns (813)16.2.4Selecting Scenes (817)16.2.5Deleting Scenes (818)16.2.6Creating and Deleting Scene Banks (820)16.2.7Clearing Scenes (820)16.2.8Duplicating Scenes (821)16.2.9Reordering Scenes (822)16.2.10Making Scenes Unique (824)16.2.11Appending Scenes to Arrangement (825)16.2.12Naming Scenes (826)16.2.13Changing the Color of a Scene (827)16.3Using Song View (828)16.3.1Section Management Overview (828)16.3.2Creating Sections (833)16.3.3Assigning a Scene to a Section (834)16.3.4Selecting Sections and Section Banks (835)16.3.5Reorganizing Sections (839)16.3.6Adjusting the Length of a Section (840)16.3.6.1Adjusting the Length of a Section Using the Software (841)16.3.6.2Adjusting the Length of a Section Using the Controller (843)16.3.7Clearing a Pattern in Song View (843)16.3.8Duplicating Sections (844)16.3.8.1Making Sections Unique (845)16.3.9Removing Sections (846)16.3.10Renaming Scenes (848)16.3.11Clearing Sections (849)16.3.12Creating and Deleting Section Banks (850)16.3.13Working with Patterns in Song view (850)16.3.13.1Creating a Pattern in Song View (850)16.3.13.2Selecting a Pattern in Song View (850)16.3.13.3Clearing a Pattern in Song View (851)16.3.13.4Renaming a Pattern in Song View (851)16.3.13.5Coloring a Pattern in Song View (851)16.3.13.6Removing a Pattern in Song View (852)16.3.13.7Duplicating a Pattern in Song View (852)16.3.14Enabling Auto Length (852)16.3.15Looping (853)16.3.15.1Setting the Loop Range in the Software (854)16.4Playing with Sections (855)16.4.1Jumping to another Playback Position in Your Project (855)16.5Triggering Sections or Scenes via MIDI (856)16.6The Arrange Grid (858)16.7Quick Grid (860)17Sampling and Sample Mapping (862)17.1Opening the Sample Editor (862)17.2Recording Audio (863)17.2.1Opening the Record Page (863)17.2.2Selecting the Source and the Recording Mode (865)17.2.3Arming, Starting, and Stopping the Recording (868)17.2.5Using the Footswitch for Recording Audio (871)17.2.6Checking Your Recordings (872)17.2.7Location and Name of Your Recorded Samples (876)17.3Editing a Sample (876)17.3.1Using the Edit Page (877)17.3.2Audio Editing Functions (882)17.4Slicing a Sample (890)17.4.1Opening the Slice Page (891)17.4.2Adjusting the Slicing Settings (893)17.4.3Live Slicing (898)17.4.3.1Live Slicing Using the Controller (898)17.4.3.2Delete All Slices (899)17.4.4Manually Adjusting Your Slices (899)17.4.5Applying the Slicing (906)17.5Mapping Samples to Zones (912)17.5.1Opening the Zone Page (912)17.5.2Zone Page Overview (913)17.5.3Selecting and Managing Zones in the Zone List (915)17.5.4Selecting and Editing Zones in the Map View (920)17.5.5Editing Zones in the Sample View (924)17.5.6Adjusting the Zone Settings (927)17.5.7Adding Samples to the Sample Map (934)18Appendix: Tips for Playing Live (937)18.1Preparations (937)18.1.1Focus on the Hardware (937)18.1.2Customize the Pads of the Hardware (937)18.1.3Check Your CPU Power Before Playing (937)18.1.4Name and Color Your Groups, Patterns, Sounds and Scenes (938)18.1.5Consider Using a Limiter on Your Master (938)18.1.6Hook Up Your Other Gear and Sync It with MIDI Clock (938)18.1.7Improvise (938)18.2Basic Techniques (938)18.2.1Use Mute and Solo (938)18.2.2Use Scene Mode and Tweak the Loop Range (939)18.2.3Create Variations of Your Drum Patterns in the Step Sequencer (939)18.2.4Use Note Repeat (939)18.2.5Set Up Your Own Multi-effect Groups and Automate Them (939)18.3Special Tricks (940)18.3.1Changing Pattern Length for Variation (940)18.3.2Using Loops to Cycle Through Samples (940)18.3.3Using Loops to Cycle Through Samples (940)18.3.4Load Long Audio Files and Play with the Start Point (940)19Troubleshooting (941)19.1Knowledge Base (941)19.2Technical Support (941)19.3Registration Support (942)19.4User Forum (942)20Glossary (943)Index (951)1Welcome to MASCHINEThank you for buying MASCHINE!MASCHINE is a groove production studio that implements the familiar working style of classi-cal groove boxes along with the advantages of a computer based system. MASCHINE is ideal for making music live, as well as in the studio. It’s the hands-on aspect of a dedicated instru-ment, the MASCHINE hardware controller, united with the advanced editing features of the MASCHINE software.Creating beats is often not very intuitive with a computer, but using the MASCHINE hardware controller to do it makes it easy and fun. You can tap in freely with the pads or use Note Re-peat to jam along. Alternatively, build your beats using the step sequencer just as in classic drum machines.Patterns can be intuitively combined and rearranged on the fly to form larger ideas. You can try out several different versions of a song without ever having to stop the music.Since you can integrate it into any sequencer that supports VST, AU, or AAX plug-ins, you can reap the benefits in almost any software setup, or use it as a stand-alone application. You can sample your own material, slice loops and rearrange them easily.However, MASCHINE is a lot more than an ordinary groovebox or sampler: it comes with an inspiring 7-gigabyte library, and a sophisticated, yet easy to use tag-based Browser to give you instant access to the sounds you are looking for.What’s more, MASCHINE provides lots of options for manipulating your sounds via internal ef-fects and other sound-shaping possibilities. You can also control external MIDI hardware and 3rd-party software with the MASCHINE hardware controller, while customizing the functions of the pads, knobs and buttons according to your needs utilizing the included Controller Editor application. We hope you enjoy this fantastic instrument as much as we do. Now let’s get go-ing!—The MASCHINE team at Native Instruments.MASCHINE Documentation1.1MASCHINE DocumentationNative Instruments provide many information sources regarding MASCHINE. The main docu-ments should be read in the following sequence:1.MASCHINE Getting Started: This document provides a practical approach to MASCHINE viaa set of tutorials covering easy and more advanced tasks in order to help you familiarizeyourself with MASCHINE.2.MASCHINE Manual (this document): The MASCHINE Manual provides you with a compre-hensive description of all MASCHINE software and hardware features.Additional documentation sources provide you with details on more specific topics:▪Controller Editor Manual: Besides using your MASCHINE hardware controller together withits dedicated MASCHINE software, you can also use it as a powerful and highly versatileMIDI controller to pilot any other MIDI-capable application or device. This is made possibleby the Controller Editor software, an application that allows you to precisely define all MIDIassignments for your MASCHINE controller. The Controller Editor was installed during theMASCHINE installation procedure. For more information on this, please refer to the Con-troller Editor Manual available as a PDF file via the Help menu of Controller Editor.▪Online Support Videos: You can find a number of support videos on The Official Native In-struments Support Channel under the following URL: https:///NIsupport-EN. We recommend that you follow along with these instructions while the respective ap-plication is running on your computer.Other Online Resources:If you are experiencing problems related to your Native Instruments product that the supplied documentation does not cover, there are several ways of getting help:▪Knowledge Base▪User Forum▪Technical Support▪Registration SupportYou will find more information on these subjects in the chapter Troubleshooting.1.2Document ConventionsThis section introduces you to the signage and text highlighting used in this manual. This man-ual uses particular formatting to point out special facts and to warn you of potential issues. The icons introducing these notes let you see what kind of information is to be expected:This document uses particular formatting to point out special facts and to warn you of poten-tial issues. The icons introducing the following notes let you see what kind of information can be expected:Furthermore, the following formatting is used:▪Text appearing in (drop-down) menus (such as Open…, Save as… etc.) in the software and paths to locations on your hard disk or other storage devices is printed in italics.▪Text appearing elsewhere (labels of buttons, controls, text next to checkboxes etc.) in the software is printed in blue. Whenever you see this formatting applied, you will find the same text appearing somewhere on the screen.▪Text appearing on the displays of the controller is printed in light grey. Whenever you see this formatting applied, you will find the same text on a controller display.▪Text appearing on labels of the hardware controller is printed in orange. Whenever you see this formatting applied, you will find the same text on the controller.▪Important names and concepts are printed in bold.▪References to keys on your computer’s keyboard you’ll find put in square brackets (e.g.,“Press [Shift] + [Enter]”).►Single instructions are introduced by this play button type arrow.→Results of actions are introduced by this smaller arrow.Naming ConventionThroughout the documentation we will refer to MASCHINE controller (or just controller) as the hardware controller and MASCHINE software as the software installed on your computer.The term “effect” will sometimes be abbreviated as “FX” when referring to elements in the MA-SCHINE software and hardware. These terms have the same meaning.Button Combinations and Shortcuts on Your ControllerMost instructions will use the “+” sign to indicate buttons (or buttons and pads) that must be pressed simultaneously, starting with the button indicated first. E.g., an instruction such as:“Press SHIFT + PLAY”means:1.Press and hold SHIFT.2.While holding SHIFT, press PLAY and release it.3.Release SHIFT.Unlabeled Buttons on the ControllerThe buttons and knobs above and below the displays on your MASCHINE controller do not have labels.。
射频卡协议ISO4443(中文)
3.16 帧 frame ...................................................................................................................3
3.3
无触点集成电路卡 Contactless integrated circuit(s) card ...................................... 3
3.4
接近式卡 Proximity card(PICC) ........................................................................ 3
3.19 唯一识别符 Unique identifier(UID) .................................................................. 4
3.7
二进制移相键控 Binary phase shift keying ............................................................ 3
3.8
调制指数 Modulation index .................................................................................... 3
3.11 防冲突环 anticollision loop ..................................................................................... 3
惠普彩色激光打印机 Pro M454 和惠普彩色激光多功能一体机 Pro M479 维修手册说明书
Table -1 Revision history Revision number 1
Revision date 6/2019
Revision notes HP LaserJet Pro M454 HP LaserJet Pro MFP M479 Repair manual initial release
Additional service and support for HP internal personnel HP internal personnel, go to one of the following Web-based Interactive Search Engine (WISE) sites: Americas (AMS) – https:///wise/home/ams-enWISE - English – https:///wise/home/ams-esWISE - Spanish – https:///wise/home/ams-ptWISE - Portuguese – https:///wise/home/ams-frWISE - French Asia Pacific / Japan (APJ) ○ https:///wise/home/apj-enWISE - English ○ https:///wise/home/apj-jaWISE - Japanese ○ https:///wise/home/apj-koWISE - Korean ○ https:///wise/home/apj-zh-HansWISE - Chinese (simplified)
Find information about the following topics ● Service manuals ● Service advisories ● Up-to-date control panel message (CPMD) troubleshooting ● Install and configure ● Printer specifications ● Solutions for printer issues and emerging issues ● Remove and replace part instructions and videos ● Warranty and regulatory information
关于如何使用插件规避检测机制的提示

关于如何使用插件规避检测机制的提示插件在软件开发中扮演着重要的角色,它们可以增强软件的功能和性能。
然而,有些软件会对插件进行检测,以确保其安全性和合法性。
本文将介绍一些方法,帮助您规避这些检测机制,以便更好地使用插件。
1. 修改插件标识一种常见的检测插件的方法是通过检查插件的标识来识别其真实身份。
因此,您可以尝试修改插件的标识,以隐藏插件的真实身份。
您可以通过修改插件的配置文件或源代码中的标识信息来实现。
这样,即使软件对插件进行检测,也无法轻易地识别插件的真实身份。
2. 混淆插件代码另一种常见的检测插件的方法是通过分析插件的代码来识别其真实用途。
为了规避这种检测机制,您可以尝试对插件的代码进行混淆。
混淆代码可以使代码变得难以阅读和理解,从而增加检测的难度。
您可以使用一些工具或技术来实现代码混淆,如重命名变量和函数名、删除无用代码、添加噪音代码等。
3. 动态加载插件有些软件会在启动时检查插件的存在和完整性。
为了规避这种检测机制,您可以尝试延迟插件的加载时间,即在软件启动后再加载插件。
通过动态加载插件,可以使软件无法在启动时检测到插件的存在,从而规避检测。
4. 使用反调试技术有些软件会使用调试器来检测插件的运行状态。
为了规避这种检测机制,您可以尝试使用反调试技术。
反调试技术是一种通过检测和干扰调试器的行为来阻止软件进行调试的方法。
您可以在插件的代码中添加反调试代码,以使调试器无法正常运行,从而规避检测。
5. 加密插件代码加密插件代码是一种常用的规避检测机制的方法。
通过加密插件代码,可以使软件无法直接读取和理解插件的代码,增加检测的难度。
您可以使用一些加密算法对插件代码进行加密,如对称加密算法、非对称加密算法等。
同时,您需要在插件中添加解密代码,以使插件在运行时能够解密自身的代码。
总结起来,为了规避检测机制,您可以尝试修改插件标识、混淆插件代码、动态加载插件、使用反调试技术和加密插件代码等方法。
这些方法可以增加检测的难度,使您能够更好地使用插件。
卡巴斯基ksc9.0如何制作跳过检测不兼容的独立安装包
制作跳过检测不兼容程序的独立安装包
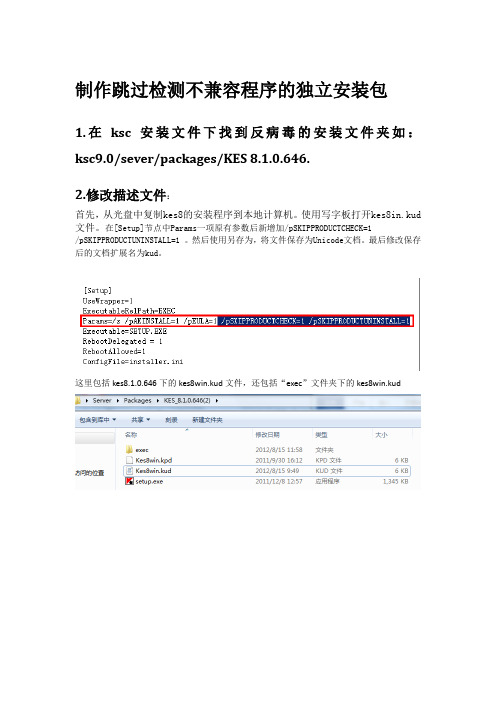
1.在ksc安装文件下找到反病毒的安装文件夹如:ksc9.0/sever/packages/KES 8.1.0.646.
2.修改描述文件:
首先,从光盘中复制kes8的安装程序到本地计算机。
使用写字板打开kes8in.kud 文件。
在[Setup]节点中Params一项原有参数后新增加/pSKIPPRODUCTCHECK=1
/pSKIPPRODUCTUNINSTALL=1 。
然后使用另存为,将文件保存为Unicode文档。
最后修改保存后的文档扩展名为kud。
这里包括kes8.1.0.646下的kes8win.kud文件,还包括“exec”文件夹下的kes8win.kud
首先用写字板打开kes8win.kud
修改之后另存为:
保存之后,将原文件kes8win.kud删除,在将kes8win.txt改成后缀名kud即kes8win.kud 3.通过管理工具制作新的安装包
通过安装包创建向导创建新的安装包,选择描述文件时选之前修改的描述文件,按照提示完成安装包创建。
3.1在ksc新建安装包
3.2输入新你安装包名称点下一步
3.3为程序选择安装文件,点浏览选择kes8win.kud文件,点击打开
3.4默认,点下一步下一步
4
4.创建独立安装包
选择创建完成的安装吧,右键菜单中选择创建独立安装包,根据向导完成创建。
变色龙嗅探密钥的使用方法
变色龙嗅探密钥的使用方法在信息时代,保护个人隐私和数据安全变得尤为重要。
加密技术作为一种重要的手段,被广泛应用于数据传输和存储过程中。
而密钥作为加密解密的关键,其安全性和保密性就显得尤为重要。
为了确保密钥的安全,变色龙嗅探密钥成为了一种常用的方法。
变色龙嗅探密钥是一种基于嗅探技术的密钥获取方式。
它通过对密钥传输过程中的信号进行嗅探和分析,从中提取出密钥的信息。
下面将详细介绍变色龙嗅探密钥的使用方法。
为了进行变色龙嗅探密钥,我们需要准备相关的设备和软件。
设备方面,我们需要一台嗅探设备,如嗅探器或嗅探网卡。
软件方面,我们需要使用一款专门的嗅探软件,如Wireshark或Cain & Abel。
这些设备和软件可以帮助我们捕获密钥传输过程中的数据包,并进行分析。
接下来,我们需要选择一个目标进行密钥嗅探。
可以是一个无线网络,一个加密通信软件,或者其他需要密钥传输的场景。
对于无线网络,我们可以选择自己的家庭网络或者公共场所的无线网络。
对于加密通信软件,我们可以选择一些常见的即时通讯软件或者电子邮件软件。
当我们确定了目标后,就可以开始进行密钥的嗅探。
首先,我们需要使用嗅探设备监听目标网络的数据包。
对于无线网络,我们可以使用嗅探网卡进行监听。
对于加密通信软件,我们可以使用嗅探软件进行监听。
在监听的过程中,我们可以看到目标网络中的所有数据包,包括密钥传输过程中的数据包。
接下来,我们需要对捕获到的数据包进行分析。
首先,我们可以筛选出与密钥传输相关的数据包。
可以根据传输协议、源地址、目的地址等信息进行筛选。
然后,我们可以进一步分析选定的数据包,提取出其中的密钥信息。
对于使用对称加密算法的密钥,我们可以通过分析数据包中的加密算法和密钥长度来确定密钥的具体数值。
对于使用非对称加密算法的密钥,我们可以通过分析数据包中的公钥和私钥信息来获取密钥的相关信息。
我们需要验证提取出的密钥是否正确。
可以使用提取出的密钥进行解密操作,或者与目标设备进行通信,验证密钥的有效性。
Indradrive 系列 故障代码

Error MessagesF9001 Error internal function call.F9002 Error internal RTOS function callF9003 WatchdogF9004 Hardware trapF8000 Fatal hardware errorF8010 Autom. commutation: Max. motion range when moving back F8011 Commutation offset could not be determinedF8012 Autom. commutation: Max. motion rangeF8013 Automatic commutation: Current too lowF8014 Automatic commutation: OvercurrentF8015 Automatic commutation: TimeoutF8016 Automatic commutation: Iteration without resultF8017 Automatic commutation: Incorrect commutation adjustment F8018 Device overtemperature shutdownF8022 Enc. 1: Enc. signals incorr. (can be cleared in ph. 2) F8023 Error mechanical link of encoder or motor connectionF8025 Overvoltage in power sectionF8027 Safe torque off while drive enabledF8028 Overcurrent in power sectionF8030 Safe stop 1 while drive enabledF8042 Encoder 2 error: Signal amplitude incorrectF8057 Device overload shutdownF8060 Overcurrent in power sectionF8064 Interruption of motor phaseF8067 Synchronization PWM-Timer wrongF8069 +/-15Volt DC errorF8070 +24Volt DC errorF8076 Error in error angle loopF8078 Speed loop error.F8079 Velocity limit value exceededF8091 Power section defectiveF8100 Error when initializing the parameter handlingF8102 Error when initializing power sectionF8118 Invalid power section/firmware combinationF8120 Invalid control section/firmware combinationF8122 Control section defectiveF8129 Incorrect optional module firmwareF8130 Firmware of option 2 of safety technology defectiveF8133 Error when checking interrupting circuitsF8134 SBS: Fatal errorF8135 SMD: Velocity exceededF8140 Fatal CCD error.F8201 Safety command for basic initialization incorrectF8203 Safety technology configuration parameter invalidF8813 Connection error mains chokeF8830 Power section errorF8838 Overcurrent external braking resistorF7010 Safely-limited increment exceededF7011 Safely-monitored position, exceeded in pos. DirectionF7012 Safely-monitored position, exceeded in neg. DirectionF7013 Safely-limited speed exceededF7020 Safe maximum speed exceededF7021 Safely-limited position exceededF7030 Position window Safe stop 2 exceededF7031 Incorrect direction of motionF7040 Validation error parameterized - effective thresholdF7041 Actual position value validation errorF7042 Validation error of safe operation modeF7043 Error of output stage interlockF7050 Time for stopping process exceeded8.3.15 F7051 Safely-monitored deceleration exceeded (159)8.4 Travel Range Errors (F6xxx) (161)8.4.1 Behavior in the Case of Travel Range Errors (161)8.4.2 F6010 PLC Runtime Error (162)8.4.3 F6024 Maximum braking time exceeded (163)8.4.4 F6028 Position limit value exceeded (overflow) (164)8.4.5 F6029 Positive position limit exceeded (164)8.4.6 F6030 Negative position limit exceeded (165)8.4.7 F6034 Emergency-Stop (166)8.4.8 F6042 Both travel range limit switches activated (167)8.4.9 F6043 Positive travel range limit switch activated (167)8.4.10 F6044 Negative travel range limit switch activated (168)8.4.11 F6140 CCD slave error (emergency halt) (169)8.5 Interface Errors (F4xxx) (169)8.5.1 Behavior in the Case of Interface Errors (169)8.5.2 F4001 Sync telegram failure (170)8.5.3 F4002 RTD telegram failure (171)8.5.4 F4003 Invalid communication phase shutdown (172)8.5.5 F4004 Error during phase progression (172)8.5.6 F4005 Error during phase regression (173)8.5.7 F4006 Phase switching without ready signal (173)8.5.8 F4009 Bus failure (173)8.5.9 F4012 Incorrect I/O length (175)8.5.10 F4016 PLC double real-time channel failure (176)8.5.11 F4017 S-III: Incorrect sequence during phase switch (176)8.5.12 F4034 Emergency-Stop (177)8.5.13 F4140 CCD communication error (178)8.6 Non-Fatal Safety Technology Errors (F3xxx) (178)8.6.1 Behavior in the Case of Non-Fatal Safety Technology Errors (178)8.6.2 F3111 Refer. missing when selecting safety related end pos (179)8.6.3 F3112 Safe reference missing (179)8.6.4 F3115 Brake check time interval exceeded (181)Troubleshooting Guide | Rexroth IndraDrive Electric Drivesand ControlsI Bosch Rexroth AG VII/XXIITable of ContentsPage8.6.5 F3116 Nominal load torque of holding system exceeded (182)8.6.6 F3117 Actual position values validation error (182)8.6.7 F3122 SBS: System error (183)8.6.8 F3123 SBS: Brake check missing (184)8.6.9 F3130 Error when checking input signals (185)8.6.10 F3131 Error when checking acknowledgment signal (185)8.6.11 F3132 Error when checking diagnostic output signal (186)8.6.12 F3133 Error when checking interrupting circuits (187)8.6.13 F3134 Dynamization time interval incorrect (188)8.6.14 F3135 Dynamization pulse width incorrect (189)8.6.15 F3140 Safety parameters validation error (192)8.6.16 F3141 Selection validation error (192)8.6.17 F3142 Activation time of enabling control exceeded (193)8.6.18 F3143 Safety command for clearing errors incorrect (194)8.6.19 F3144 Incorrect safety configuration (195)8.6.20 F3145 Error when unlocking the safety door (196)8.6.21 F3146 System error channel 2 (197)8.6.22 F3147 System error channel 1 (198)8.6.23 F3150 Safety command for system start incorrect (199)8.6.24 F3151 Safety command for system halt incorrect (200)8.6.25 F3152 Incorrect backup of safety technology data (201)8.6.26 F3160 Communication error of safe communication (202)8.7 Non-Fatal Errors (F2xxx) (202)8.7.1 Behavior in the Case of Non-Fatal Errors (202)8.7.2 F2002 Encoder assignment not allowed for synchronization (203)8.7.3 F2003 Motion step skipped (203)8.7.4 F2004 Error in MotionProfile (204)8.7.5 F2005 Cam table invalid (205)8.7.6 F2006 MMC was removed (206)8.7.7 F2007 Switching to non-initialized operation mode (206)8.7.8 F2008 RL The motor type has changed (207)8.7.9 F2009 PL Load parameter default values (208)8.7.10 F2010 Error when initializing digital I/O (-> S-0-0423) (209)8.7.11 F2011 PLC - Error no. 1 (210)8.7.12 F2012 PLC - Error no. 2 (210)8.7.13 F2013 PLC - Error no. 3 (211)8.7.14 F2014 PLC - Error no. 4 (211)8.7.15 F2018 Device overtemperature shutdown (211)8.7.16 F2019 Motor overtemperature shutdown (212)8.7.17 F2021 Motor temperature monitor defective (213)8.7.18 F2022 Device temperature monitor defective (214)8.7.19 F2025 Drive not ready for control (214)8.7.20 F2026 Undervoltage in power section (215)8.7.21 F2027 Excessive oscillation in DC bus (216)8.7.22 F2028 Excessive deviation (216)8.7.23 F2031 Encoder 1 error: Signal amplitude incorrect (217)VIII/XXII Bosch Rexroth AG | Electric Drivesand ControlsRexroth IndraDrive | Troubleshooting GuideTable of ContentsPage8.7.24 F2032 Validation error during commutation fine adjustment (217)8.7.25 F2033 External power supply X10 error (218)8.7.26 F2036 Excessive position feedback difference (219)8.7.27 F2037 Excessive position command difference (220)8.7.28 F2039 Maximum acceleration exceeded (220)8.7.29 F2040 Device overtemperature 2 shutdown (221)8.7.30 F2042 Encoder 2: Encoder signals incorrect (222)8.7.31 F2043 Measuring encoder: Encoder signals incorrect (222)8.7.32 F2044 External power supply X15 error (223)8.7.33 F2048 Low battery voltage (224)8.7.34 F2050 Overflow of target position preset memory (225)8.7.35 F2051 No sequential block in target position preset memory (225)8.7.36 F2053 Incr. encoder emulator: Pulse frequency too high (226)8.7.37 F2054 Incr. encoder emulator: Hardware error (226)8.7.38 F2055 External power supply dig. I/O error (227)8.7.39 F2057 Target position out of travel range (227)8.7.40 F2058 Internal overflow by positioning input (228)8.7.41 F2059 Incorrect command value direction when positioning (229)8.7.42 F2063 Internal overflow master axis generator (230)8.7.43 F2064 Incorrect cmd value direction master axis generator (230)8.7.44 F2067 Synchronization to master communication incorrect (231)8.7.45 F2068 Brake error (231)8.7.46 F2069 Error when releasing the motor holding brake (232)8.7.47 F2074 Actual pos. value 1 outside absolute encoder window (232)8.7.48 F2075 Actual pos. value 2 outside absolute encoder window (233)8.7.49 F2076 Actual pos. value 3 outside absolute encoder window (234)8.7.50 F2077 Current measurement trim wrong (235)8.7.51 F2086 Error supply module (236)8.7.52 F2087 Module group communication error (236)8.7.53 F2100 Incorrect access to command value memory (237)8.7.54 F2101 It was impossible to address MMC (237)8.7.55 F2102 It was impossible to address I2C memory (238)8.7.56 F2103 It was impossible to address EnDat memory (238)8.7.57 F2104 Commutation offset invalid (239)8.7.58 F2105 It was impossible to address Hiperface memory (239)8.7.59 F2110 Error in non-cyclical data communic. of power section (240)8.7.60 F2120 MMC: Defective or missing, replace (240)8.7.61 F2121 MMC: Incorrect data or file, create correctly (241)8.7.62 F2122 MMC: Incorrect IBF file, correct it (241)8.7.63 F2123 Retain data backup impossible (242)8.7.64 F2124 MMC: Saving too slowly, replace (243)8.7.65 F2130 Error comfort control panel (243)8.7.66 F2140 CCD slave error (243)8.7.67 F2150 MLD motion function block error (244)8.7.68 F2174 Loss of motor encoder reference (244)8.7.69 F2175 Loss of optional encoder reference (245)Troubleshooting Guide | Rexroth IndraDrive Electric Drivesand Controls| Bosch Rexroth AG IX/XXIITable of ContentsPage8.7.70 F2176 Loss of measuring encoder reference (246)8.7.71 F2177 Modulo limitation error of motor encoder (246)8.7.72 F2178 Modulo limitation error of optional encoder (247)8.7.73 F2179 Modulo limitation error of measuring encoder (247)8.7.74 F2190 Incorrect Ethernet configuration (248)8.7.75 F2260 Command current limit shutoff (249)8.7.76 F2270 Analog input 1 or 2, wire break (249)8.7.77 F2802 PLL is not synchronized (250)8.7.78 F2814 Undervoltage in mains (250)8.7.79 F2815 Overvoltage in mains (251)8.7.80 F2816 Softstart fault power supply unit (251)8.7.81 F2817 Overvoltage in power section (251)8.7.82 F2818 Phase failure (252)8.7.83 F2819 Mains failure (253)8.7.84 F2820 Braking resistor overload (253)8.7.85 F2821 Error in control of braking resistor (254)8.7.86 F2825 Switch-on threshold braking resistor too low (255)8.7.87 F2833 Ground fault in motor line (255)8.7.88 F2834 Contactor control error (256)8.7.89 F2835 Mains contactor wiring error (256)8.7.90 F2836 DC bus balancing monitor error (257)8.7.91 F2837 Contactor monitoring error (257)8.7.92 F2840 Error supply shutdown (257)8.7.93 F2860 Overcurrent in mains-side power section (258)8.7.94 F2890 Invalid device code (259)8.7.95 F2891 Incorrect interrupt timing (259)8.7.96 F2892 Hardware variant not supported (259)8.8 SERCOS Error Codes / Error Messages of Serial Communication (259)9 Warnings (Exxxx) (263)9.1 Fatal Warnings (E8xxx) (263)9.1.1 Behavior in the Case of Fatal Warnings (263)9.1.2 E8025 Overvoltage in power section (263)9.1.3 E8026 Undervoltage in power section (264)9.1.4 E8027 Safe torque off while drive enabled (265)9.1.5 E8028 Overcurrent in power section (265)9.1.6 E8029 Positive position limit exceeded (266)9.1.7 E8030 Negative position limit exceeded (267)9.1.8 E8034 Emergency-Stop (268)9.1.9 E8040 Torque/force actual value limit active (268)9.1.10 E8041 Current limit active (269)9.1.11 E8042 Both travel range limit switches activated (269)9.1.12 E8043 Positive travel range limit switch activated (270)9.1.13 E8044 Negative travel range limit switch activated (271)9.1.14 E8055 Motor overload, current limit active (271)9.1.15 E8057 Device overload, current limit active (272)X/XXII Bosch Rexroth AG | Electric Drivesand ControlsRexroth IndraDrive | Troubleshooting GuideTable of ContentsPage9.1.16 E8058 Drive system not ready for operation (273)9.1.17 E8260 Torque/force command value limit active (273)9.1.18 E8802 PLL is not synchronized (274)9.1.19 E8814 Undervoltage in mains (275)9.1.20 E8815 Overvoltage in mains (275)9.1.21 E8818 Phase failure (276)9.1.22 E8819 Mains failure (276)9.2 Warnings of Category E4xxx (277)9.2.1 E4001 Double MST failure shutdown (277)9.2.2 E4002 Double MDT failure shutdown (278)9.2.3 E4005 No command value input via master communication (279)9.2.4 E4007 SERCOS III: Consumer connection failed (280)9.2.5 E4008 Invalid addressing command value data container A (280)9.2.6 E4009 Invalid addressing actual value data container A (281)9.2.7 E4010 Slave not scanned or address 0 (281)9.2.8 E4012 Maximum number of CCD slaves exceeded (282)9.2.9 E4013 Incorrect CCD addressing (282)9.2.10 E4014 Incorrect phase switch of CCD slaves (283)9.3 Possible Warnings When Operating Safety Technology (E3xxx) (283)9.3.1 Behavior in Case a Safety Technology Warning Occurs (283)9.3.2 E3100 Error when checking input signals (284)9.3.3 E3101 Error when checking acknowledgment signal (284)9.3.4 E3102 Actual position values validation error (285)9.3.5 E3103 Dynamization failed (285)9.3.6 E3104 Safety parameters validation error (286)9.3.7 E3105 Validation error of safe operation mode (286)9.3.8 E3106 System error safety technology (287)9.3.9 E3107 Safe reference missing (287)9.3.10 E3108 Safely-monitored deceleration exceeded (288)9.3.11 E3110 Time interval of forced dynamization exceeded (289)9.3.12 E3115 Prewarning, end of brake check time interval (289)9.3.13 E3116 Nominal load torque of holding system reached (290)9.4 Non-Fatal Warnings (E2xxx) (290)9.4.1 Behavior in Case a Non-Fatal Warning Occurs (290)9.4.2 E2010 Position control with encoder 2 not possible (291)9.4.3 E2011 PLC - Warning no. 1 (291)9.4.4 E2012 PLC - Warning no. 2 (291)9.4.5 E2013 PLC - Warning no. 3 (292)9.4.6 E2014 PLC - Warning no. 4 (292)9.4.7 E2021 Motor temperature outside of measuring range (292)9.4.8 E2026 Undervoltage in power section (293)9.4.9 E2040 Device overtemperature 2 prewarning (294)9.4.10 E2047 Interpolation velocity = 0 (294)9.4.11 E2048 Interpolation acceleration = 0 (295)9.4.12 E2049 Positioning velocity >= limit value (296)9.4.13 E2050 Device overtemp. Prewarning (297)Troubleshooting Guide | Rexroth IndraDrive Electric Drivesand Controls| Bosch Rexroth AG XI/XXIITable of ContentsPage9.4.14 E2051 Motor overtemp. prewarning (298)9.4.15 E2053 Target position out of travel range (298)9.4.16 E2054 Not homed (300)9.4.17 E2055 Feedrate override S-0-0108 = 0 (300)9.4.18 E2056 Torque limit = 0 (301)9.4.19 E2058 Selected positioning block has not been programmed (302)9.4.20 E2059 Velocity command value limit active (302)9.4.21 E2061 Device overload prewarning (303)9.4.22 E2063 Velocity command value > limit value (304)9.4.23 E2064 Target position out of num. range (304)9.4.24 E2069 Holding brake torque too low (305)9.4.25 E2070 Acceleration limit active (306)9.4.26 E2074 Encoder 1: Encoder signals disturbed (306)9.4.27 E2075 Encoder 2: Encoder signals disturbed (307)9.4.28 E2076 Measuring encoder: Encoder signals disturbed (308)9.4.29 E2077 Absolute encoder monitoring, motor encoder (encoder alarm) (308)9.4.30 E2078 Absolute encoder monitoring, opt. encoder (encoder alarm) (309)9.4.31 E2079 Absolute enc. monitoring, measuring encoder (encoder alarm) (309)9.4.32 E2086 Prewarning supply module overload (310)9.4.33 E2092 Internal synchronization defective (310)9.4.34 E2100 Positioning velocity of master axis generator too high (311)9.4.35 E2101 Acceleration of master axis generator is zero (312)9.4.36 E2140 CCD error at node (312)9.4.37 E2270 Analog input 1 or 2, wire break (312)9.4.38 E2802 HW control of braking resistor (313)9.4.39 E2810 Drive system not ready for operation (314)9.4.40 E2814 Undervoltage in mains (314)9.4.41 E2816 Undervoltage in power section (314)9.4.42 E2818 Phase failure (315)9.4.43 E2819 Mains failure (315)9.4.44 E2820 Braking resistor overload prewarning (316)9.4.45 E2829 Not ready for power on (316)。
Glider Flying Handbook说明书
Glider Flying Handbook2013U.S. Department of TransportationFEDERAL AVIATION ADMINISTRATIONFlight Standards Servicei iPrefaceThe Glider Flying Handbook is designed as a technical manual for applicants who are preparing for glider category rating and for currently certificated glider pilots who wish to improve their knowledge. Certificated flight instructors will find this handbook a valuable training aid, since detailed coverage of aeronautical decision-making, components and systems, aerodynamics, flight instruments, performance limitations, ground operations, flight maneuvers, traffic patterns, emergencies, soaring weather, soaring techniques, and cross-country flight is included. Topics such as radio navigation and communication, use of flight information publications, and regulations are available in other Federal Aviation Administration (FAA) publications.The discussion and explanations reflect the most commonly used practices and principles. Occasionally, the word “must” or similar language is used where the desired action is deemed critical. The use of such language is not intended to add to, interpret, or relieve a duty imposed by Title 14 of the Code of Federal Regulations (14 CFR). Persons working towards a glider rating are advised to review the references from the applicable practical test standards (FAA-G-8082-4, Sport Pilot and Flight Instructor with a Sport Pilot Rating Knowledge Test Guide, FAA-G-8082-5, Commercial Pilot Knowledge Test Guide, and FAA-G-8082-17, Recreational Pilot and Private Pilot Knowledge Test Guide). Resources for study include FAA-H-8083-25, Pilot’s Handbook of Aeronautical Knowledge, FAA-H-8083-2, Risk Management Handbook, and Advisory Circular (AC) 00-6, Aviation Weather For Pilots and Flight Operations Personnel, AC 00-45, Aviation Weather Services, as these documents contain basic material not duplicated herein. All beginning applicants should refer to FAA-H-8083-25, Pilot’s Handbook of Aeronautical Knowledge, for study and basic library reference.It is essential for persons using this handbook to become familiar with and apply the pertinent parts of 14 CFR and the Aeronautical Information Manual (AIM). The AIM is available online at . The current Flight Standards Service airman training and testing material and learning statements for all airman certificates and ratings can be obtained from .This handbook supersedes FAA-H-8083-13, Glider Flying Handbook, dated 2003. Always select the latest edition of any publication and check the website for errata pages and listing of changes to FAA educational publications developed by the FAA’s Airman Testing Standards Branch, AFS-630.This handbook is available for download, in PDF format, from .This handbook is published by the United States Department of Transportation, Federal Aviation Administration, Airman Testing Standards Branch, AFS-630, P.O. Box 25082, Oklahoma City, OK 73125.Comments regarding this publication should be sent, in email form, to the following address:********************************************John M. AllenDirector, Flight Standards Serviceiiii vAcknowledgmentsThe Glider Flying Handbook was produced by the Federal Aviation Administration (FAA) with the assistance of Safety Research Corporation of America (SRCA). The FAA wishes to acknowledge the following contributors: Sue Telford of Telford Fishing & Hunting Services for images used in Chapter 1JerryZieba () for images used in Chapter 2Tim Mara () for images used in Chapters 2 and 12Uli Kremer of Alexander Schleicher GmbH & Co for images used in Chapter 2Richard Lancaster () for images and content used in Chapter 3Dave Nadler of Nadler & Associates for images used in Chapter 6Dave McConeghey for images used in Chapter 6John Brandon (www.raa.asn.au) for images and content used in Chapter 7Patrick Panzera () for images used in Chapter 8Jeff Haby (www.theweatherprediction) for images used in Chapter 8National Soaring Museum () for content used in Chapter 9Bill Elliot () for images used in Chapter 12.Tiffany Fidler for images used in Chapter 12.Additional appreciation is extended to the Soaring Society of America, Inc. (), the Soaring Safety Foundation, and Mr. Brad Temeyer and Mr. Bill Martin from the National Oceanic and Atmospheric Administration (NOAA) for their technical support and input.vv iPreface (iii)Acknowledgments (v)Table of Contents (vii)Chapter 1Gliders and Sailplanes ........................................1-1 Introduction....................................................................1-1 Gliders—The Early Years ..............................................1-2 Glider or Sailplane? .......................................................1-3 Glider Pilot Schools ......................................................1-4 14 CFR Part 141 Pilot Schools ...................................1-5 14 CFR Part 61 Instruction ........................................1-5 Glider Certificate Eligibility Requirements ...................1-5 Common Glider Concepts ..............................................1-6 Terminology...............................................................1-6 Converting Metric Distance to Feet ...........................1-6 Chapter 2Components and Systems .................................2-1 Introduction....................................................................2-1 Glider Design .................................................................2-2 The Fuselage ..................................................................2-4 Wings and Components .............................................2-4 Lift/Drag Devices ...........................................................2-5 Empennage .....................................................................2-6 Towhook Devices .......................................................2-7 Powerplant .....................................................................2-7 Self-Launching Gliders .............................................2-7 Sustainer Engines .......................................................2-8 Landing Gear .................................................................2-8 Wheel Brakes .............................................................2-8 Chapter 3Aerodynamics of Flight .......................................3-1 Introduction....................................................................3-1 Forces of Flight..............................................................3-2 Newton’s Third Law of Motion .................................3-2 Lift ..............................................................................3-2The Effects of Drag on a Glider .....................................3-3 Parasite Drag ..............................................................3-3 Form Drag ...............................................................3-3 Skin Friction Drag ..................................................3-3 Interference Drag ....................................................3-5 Total Drag...................................................................3-6 Wing Planform ...........................................................3-6 Elliptical Wing ........................................................3-6 Rectangular Wing ...................................................3-7 Tapered Wing .........................................................3-7 Swept-Forward Wing ..............................................3-7 Washout ..................................................................3-7 Glide Ratio .................................................................3-8 Aspect Ratio ............................................................3-9 Weight ........................................................................3-9 Thrust .........................................................................3-9 Three Axes of Rotation ..................................................3-9 Stability ........................................................................3-10 Flutter .......................................................................3-11 Lateral Stability ........................................................3-12 Turning Flight ..............................................................3-13 Load Factors .................................................................3-13 Radius of Turn ..........................................................3-14 Turn Coordination ....................................................3-15 Slips ..........................................................................3-15 Forward Slip .........................................................3-16 Sideslip .................................................................3-17 Spins .........................................................................3-17 Ground Effect ...............................................................3-19 Chapter 4Flight Instruments ...............................................4-1 Introduction....................................................................4-1 Pitot-Static Instruments ..................................................4-2 Impact and Static Pressure Lines................................4-2 Airspeed Indicator ......................................................4-2 The Effects of Altitude on the AirspeedIndicator..................................................................4-3 Types of Airspeed ...................................................4-3Table of ContentsviiAirspeed Indicator Markings ......................................4-5 Other Airspeed Limitations ........................................4-6 Altimeter .....................................................................4-6 Principles of Operation ...........................................4-6 Effect of Nonstandard Pressure andTemperature............................................................4-7 Setting the Altimeter (Kollsman Window) .............4-9 Types of Altitude ......................................................4-10 Variometer................................................................4-11 Total Energy System .............................................4-14 Netto .....................................................................4-14 Electronic Flight Computers ....................................4-15 Magnetic Compass .......................................................4-16 Yaw String ................................................................4-16 Inclinometer..............................................................4-16 Gyroscopic Instruments ...............................................4-17 G-Meter ........................................................................4-17 FLARM Collision Avoidance System .........................4-18 Chapter 5Glider Performance .............................................5-1 Introduction....................................................................5-1 Factors Affecting Performance ......................................5-2 High and Low Density Altitude Conditions ...........5-2 Atmospheric Pressure .............................................5-2 Altitude ...................................................................5-3 Temperature............................................................5-3 Wind ...........................................................................5-3 Weight ........................................................................5-5 Rate of Climb .................................................................5-7 Flight Manuals and Placards ..........................................5-8 Placards ......................................................................5-8 Performance Information ...........................................5-8 Glider Polars ...............................................................5-8 Weight and Balance Information .............................5-10 Limitations ...............................................................5-10 Weight and Balance .....................................................5-12 Center of Gravity ......................................................5-12 Problems Associated With CG Forward ofForward Limit .......................................................5-12 Problems Associated With CG Aft of Aft Limit ..5-13 Sample Weight and Balance Problems ....................5-13 Ballast ..........................................................................5-14 Chapter 6Preflight and Ground Operations .......................6-1 Introduction....................................................................6-1 Assembly and Storage Techniques ................................6-2 Trailering....................................................................6-3 Tiedown and Securing ................................................6-4Water Ballast ..............................................................6-4 Ground Handling........................................................6-4 Launch Equipment Inspection ....................................6-5 Glider Preflight Inspection .........................................6-6 Prelaunch Checklist ....................................................6-7 Glider Care .....................................................................6-7 Preventive Maintenance .............................................6-8 Chapter 7Launch and Recovery Procedures and Flight Maneuvers ............................................................7-1 Introduction....................................................................7-1 Aerotow Takeoff Procedures .........................................7-2 Signals ........................................................................7-2 Prelaunch Signals ....................................................7-2 Inflight Signals ........................................................7-3 Takeoff Procedures and Techniques ..........................7-3 Normal Assisted Takeoff............................................7-4 Unassisted Takeoff.....................................................7-5 Crosswind Takeoff .....................................................7-5 Assisted ...................................................................7-5 Unassisted...............................................................7-6 Aerotow Climb-Out ....................................................7-6 Aerotow Release.........................................................7-8 Slack Line ...................................................................7-9 Boxing the Wake ......................................................7-10 Ground Launch Takeoff Procedures ............................7-11 CG Hooks .................................................................7-11 Signals ......................................................................7-11 Prelaunch Signals (Winch/Automobile) ...............7-11 Inflight Signals ......................................................7-12 Tow Speeds ..............................................................7-12 Automobile Launch ..................................................7-14 Crosswind Takeoff and Climb .................................7-14 Normal Into-the-Wind Launch .................................7-15 Climb-Out and Release Procedures ..........................7-16 Self-Launch Takeoff Procedures ..............................7-17 Preparation and Engine Start ....................................7-17 Taxiing .....................................................................7-18 Pretakeoff Check ......................................................7-18 Normal Takeoff ........................................................7-19 Crosswind Takeoff ...................................................7-19 Climb-Out and Shutdown Procedures ......................7-19 Landing .....................................................................7-21 Gliderport/Airport Traffic Patterns and Operations .....7-22 Normal Approach and Landing ................................7-22 Crosswind Landing ..................................................7-25 Slips ..........................................................................7-25 Downwind Landing ..................................................7-27 After Landing and Securing .....................................7-27viiiPerformance Maneuvers ..............................................7-27 Straight Glides ..........................................................7-27 Turns.........................................................................7-28 Roll-In ...................................................................7-29 Roll-Out ................................................................7-30 Steep Turns ...........................................................7-31 Maneuvering at Minimum Controllable Airspeed ...7-31 Stall Recognition and Recovery ...............................7-32 Secondary Stalls ....................................................7-34 Accelerated Stalls .................................................7-34 Crossed-Control Stalls ..........................................7-35 Operating Airspeeds .....................................................7-36 Minimum Sink Airspeed ..........................................7-36 Best Glide Airspeed..................................................7-37 Speed to Fly ..............................................................7-37 Chapter 8Abnormal and Emergency Procedures .............8-1 Introduction....................................................................8-1 Porpoising ......................................................................8-2 Pilot-Induced Oscillations (PIOs) ..............................8-2 PIOs During Launch ...................................................8-2 Factors Influencing PIOs ........................................8-2 Improper Elevator Trim Setting ..............................8-3 Improper Wing Flaps Setting ..................................8-3 Pilot-Induced Roll Oscillations During Launch .........8-3 Pilot-Induced Yaw Oscillations During Launch ........8-4 Gust-Induced Oscillations ..............................................8-5 Vertical Gusts During High-Speed Cruise .................8-5 Pilot-Induced Pitch Oscillations During Landing ......8-6 Glider-Induced Oscillations ...........................................8-6 Pitch Influence of the Glider Towhook Position ........8-6 Self-Launching Glider Oscillations During Powered Flight ...........................................................8-7 Nosewheel Glider Oscillations During Launchesand Landings ..............................................................8-7 Tailwheel/Tailskid Equipped Glider Oscillations During Launches and Landings ..................................8-8 Aerotow Abnormal and Emergency Procedures ............8-8 Abnormal Procedures .................................................8-8 Towing Failures........................................................8-10 Tow Failure With Runway To Land and Stop ......8-11 Tow Failure Without Runway To Land BelowReturning Altitude ................................................8-11 Tow Failure Above Return to Runway Altitude ...8-11 Tow Failure Above 800' AGL ..............................8-12 Tow Failure Above Traffic Pattern Altitude .........8-13 Slack Line .................................................................8-13 Ground Launch Abnormal and Emergency Procedures ....................................................................8-14 Abnormal Procedures ...............................................8-14 Emergency Procedures .............................................8-14 Self-Launch Takeoff Emergency Procedures ..............8-15 Emergency Procedures .............................................8-15 Spiral Dives ..................................................................8-15 Spins .............................................................................8-15 Entry Phase ...............................................................8-17 Incipient Phase .........................................................8-17 Developed Phase ......................................................8-17 Recovery Phase ........................................................8-17 Off-Field Landing Procedures .....................................8-18 Afterlanding Off Field .............................................8-20 Off-Field Landing Without Injury ........................8-20 Off-Field Landing With Injury .............................8-20 System and Equipment Malfunctions ..........................8-20 Flight Instrument Malfunctions ................................8-20 Airspeed Indicator Malfunctions ..........................8-21 Altimeter Malfunctions .........................................8-21 Variometer Malfunctions ......................................8-21 Compass Malfunctions .........................................8-21 Glider Canopy Malfunctions ....................................8-21 Broken Glider Canopy ..........................................8-22 Frosted Glider Canopy ..........................................8-22 Water Ballast Malfunctions ......................................8-22 Retractable Landing Gear Malfunctions ..................8-22 Primary Flight Control Systems ...............................8-22 Elevator Malfunctions ..........................................8-22 Aileron Malfunctions ............................................8-23 Rudder Malfunctions ............................................8-24 Secondary Flight Controls Systems .........................8-24 Elevator Trim Malfunctions .................................8-24 Spoiler/Dive Brake Malfunctions .........................8-24 Miscellaneous Flight System Malfunctions .................8-25 Towhook Malfunctions ............................................8-25 Oxygen System Malfunctions ..................................8-25 Drogue Chute Malfunctions .....................................8-25 Self-Launching Gliders ................................................8-26 Self-Launching/Sustainer Glider Engine Failure During Takeoff or Climb ..........................................8-26 Inability to Restart a Self-Launching/SustainerGlider Engine While Airborne .................................8-27 Self-Launching Glider Propeller Malfunctions ........8-27 Self-Launching Glider Electrical System Malfunctions .............................................................8-27 In-flight Fire .............................................................8-28 Emergency Equipment and Survival Gear ...................8-28 Survival Gear Checklists ..........................................8-28 Food and Water ........................................................8-28ixClothing ....................................................................8-28 Communication ........................................................8-29 Navigation Equipment ..............................................8-29 Medical Equipment ..................................................8-29 Stowage ....................................................................8-30 Parachute ..................................................................8-30 Oxygen System Malfunctions ..................................8-30 Accident Prevention .....................................................8-30 Chapter 9Soaring Weather ..................................................9-1 Introduction....................................................................9-1 The Atmosphere .............................................................9-2 Composition ...............................................................9-2 Properties ....................................................................9-2 Temperature............................................................9-2 Density ....................................................................9-2 Pressure ...................................................................9-2 Standard Atmosphere .................................................9-3 Layers of the Atmosphere ..........................................9-4 Scale of Weather Events ................................................9-4 Thermal Soaring Weather ..............................................9-6 Thermal Shape and Structure .....................................9-6 Atmospheric Stability .................................................9-7 Air Masses Conducive to Thermal Soaring ...................9-9 Cloud Streets ..............................................................9-9 Thermal Waves...........................................................9-9 Thunderstorms..........................................................9-10 Lifted Index ..........................................................9-12 K-Index .................................................................9-12 Weather for Slope Soaring .......................................9-14 Mechanism for Wave Formation ..............................9-16 Lift Due to Convergence ..........................................9-19 Obtaining Weather Information ...................................9-21 Preflight Weather Briefing........................................9-21 Weather-ReIated Information ..................................9-21 Interpreting Weather Charts, Reports, andForecasts ......................................................................9-23 Graphic Weather Charts ...........................................9-23 Winds and Temperatures Aloft Forecast ..............9-23 Composite Moisture Stability Chart .....................9-24 Chapter 10Soaring Techniques ..........................................10-1 Introduction..................................................................10-1 Thermal Soaring ...........................................................10-2 Locating Thermals ....................................................10-2 Cumulus Clouds ...................................................10-2 Other Indicators of Thermals ................................10-3 Wind .....................................................................10-4 The Big Picture .....................................................10-5Entering a Thermal ..............................................10-5 Inside a Thermal.......................................................10-6 Bank Angle ...........................................................10-6 Speed .....................................................................10-6 Centering ...............................................................10-7 Collision Avoidance ................................................10-9 Exiting a Thermal .....................................................10-9 Atypical Thermals ..................................................10-10 Ridge/Slope Soaring ..................................................10-10 Traps ......................................................................10-10 Procedures for Safe Flying .....................................10-12 Bowls and Spurs .....................................................10-13 Slope Lift ................................................................10-13 Obstructions ...........................................................10-14 Tips and Techniques ...............................................10-15 Wave Soaring .............................................................10-16 Preflight Preparation ...............................................10-17 Getting Into the Wave ............................................10-18 Flying in the Wave .................................................10-20 Soaring Convergence Zones ...................................10-23 Combined Sources of Updrafts ..............................10-24 Chapter 11Cross-Country Soaring .....................................11-1 Introduction..................................................................11-1 Flight Preparation and Planning ...................................11-2 Personal and Special Equipment ..................................11-3 Navigation ....................................................................11-5 Using the Plotter .......................................................11-5 A Sample Cross-Country Flight ...............................11-5 Navigation Using GPS .............................................11-8 Cross-Country Techniques ...........................................11-9 Soaring Faster and Farther .........................................11-11 Height Bands ..........................................................11-11 Tips and Techniques ...............................................11-12 Special Situations .......................................................11-14 Course Deviations ..................................................11-14 Lost Procedures ......................................................11-14 Cross-Country Flight in a Self-Launching Glider .....11-15 High-Performance Glider Operations and Considerations ............................................................11-16 Glider Complexity ..................................................11-16 Water Ballast ..........................................................11-17 Cross-Country Flight Using Other Lift Sources ........11-17 Chapter 12Towing ................................................................12-1 Introduction..................................................................12-1 Equipment Inspections and Operational Checks .........12-2 Tow Hook ................................................................12-2 Schweizer Tow Hook ...........................................12-2x。
宝藏猎人3模组悬赏台bug

宝藏猎人3模组悬赏台bug摘要:1.宝藏猎人3 模组背景介绍2.悬赏台bug 的具体表现3.bug 对游戏体验的影响4.玩家对悬赏台bug 的反应5.开发者的回应及解决方案6.bug 对游戏口碑的影响正文:宝藏猎人3 是一款深受玩家喜爱的游戏,然而近期有玩家发现了一个模组悬赏台的bug,影响了游戏体验。
下面将详细介绍这个bug 的情况。
宝藏猎人3 模组是一款丰富游戏内容的模组,通过增加新的任务、道具和挑战,为玩家带来更多的乐趣。
然而,近期有玩家在完成悬赏台任务时发现了一个bug,使得任务无法正常完成。
具体表现为,当玩家点击悬赏台任务栏时,游戏会出现错误提示并自动退出。
这个bug 的出现给玩家带来了很大的困扰,因为悬赏台任务是游戏中的重要组成部分,完成这些任务可以获得丰厚的奖励。
由于bug 的存在,玩家无法正常完成任务,影响了他们的游戏体验。
玩家们对悬赏台bug 表达了强烈的不满,他们在游戏论坛和社交平台上发布了自己的遭遇,希望开发者能够尽快解决这个问题。
同时,一些热心的玩家还尝试自己寻找解决方案,但目前尚未找到根本原因。
面对玩家的质疑,宝藏猎人3 的开发团队也做出了回应。
他们表示已经注意到了这个问题,并在积极寻找解决方案。
为了确保bug 得到修复,开发者建议遇到问题的玩家提供详细的错误报告,以便于他们更快地定位问题。
悬赏台bug 对宝藏猎人3 的口碑产生了一定的影响。
尽管游戏整体品质较高,但这个bug 的出现让一些玩家对游戏的可玩性产生了质疑。
为了维护游戏的良好口碑,开发者需要尽快解决这个问题,确保玩家的游戏体验不受影响。
总之,宝藏猎人3 模组悬赏台bug 是一个影响玩家游戏体验的问题。
名侦探柯南英语作文

Detective Conan,known in Japanese as Meitantei Conan,is a popular manga and anime series created by Gosho Aoyama.The story revolves around a high school detective named Shinichi Kudo who is accidentally exposed to a mysterious poison that transforms him into a child.To hide his true identity,he adopts the name Conan Edogawa, inspired by the famous detective authors Arthur Conan Doyle and Ranpo Edogawa.In the series,Conan lives with his childhood friend,Ran Mori,and her father,Kogoro Mori,who is a private detective.Conan uses his exceptional detective skills to solve various cases,often disguising his voice to give Kogoro the credit.Despite his youthful appearance,Conans intelligence and deductive reasoning are unmatched,and he is always one step ahead of the criminals.The English version of Detective Conan,also known as Case Closed,has garnered a significant international following.The series is known for its intricate plots,suspenseful storytelling,and the development of its characters.Conans interactions with other characters,such as his friends,the police,and the mysterious Black Organization,add depth and complexity to the narrative.One of the most appealing aspects of Detective Conan is its blend of mystery and humor. The series often incorporates lighthearted moments and comedic relief,which provide a refreshing contrast to the intense and suspenseful investigations.This balance between seriousness and levity makes the series enjoyable for a wide range of audiences.The English adaptation of Detective Conan has been praised for its faithful translation and preservation of the original Japanese content.The voice actors have done an excellent job of capturing the personalities and emotions of the characters,making the English version just as engaging as the original.In conclusion,Detective Conan is a captivating series that combines elements of mystery, suspense,and humor.The English version,known as Case Closed,has successfully brought this beloved Japanese series to an international audience,allowing fans around the world to enjoy the adventures of the brilliant and resourceful Conan Edogawa.。
Evolis Zenius 芯片卡打印机用户指南说明书

SETTING NEW STANDARDS IN CARD PRINTINGWith Zenius , Evolis unveils its new conception of plastic card personalization, with a clear focus on the user and unmatched printing quality. Zenius, the fi rst eco-designed printer, stands out with its optimized features and a compact and sleek design.Zenius benefi ts from the newEvolis High Trust ® consumables and the Evolis Premium Suite ® software to provide ease of use and performance levels that set the new benchmark in the market.The Evolis Premium Suite ® software, at the core of all new Evolis printers. This software architecture supplies the Print Center, a printing and confi guration system that monitors allcommunications between the printer and the user. The printer’s operation can be managed entirely right from the user’s interface and through pop-up notifi cations on the printing status, ribbon availability and maintenance tasks. This Printer Manager also offers direct access to the Evolis Web-based Support Center, available on a 24/7 basis.The Evolis High Trust ® range of consumables is specifi cally designed to deliver premium graphic performances and ease of use. Installing the ribbon cassette is a simple one-step process, and with its integrated chip, Zenius instantly identifi es the ribbon type and confi gures all settings accordingly.ZENIUS: WHEN INNOVATION MEETS EFFICIENCYZenius comes with two major innovations:Zenius is the one-stop solution to print high-quality single-sided cards, in monochrome or color, and encode technology cards, in single or small runs, for a variety of applications: employee badges, access control badges, payment cards, transportation passes, and more.EASY-TO-USEZenius makes it easy for you every step of the way! Discover a wealth of advanced features loaded in a contemporary yet compact design.SCALABLEEquipped with state-of-the-art printingtechnologies, the Expert version of Zenius can be upgraded onsite with multiple encoders. These fl exible features ensure that you will always be in line with your current and future requirements in plastic card printing.COMPACT, LIGHTWEIGHT AND SILENTWith a sound level of just 46 dB (A) and its amazingly small size, Zenius can be accommodated in virtually any environment, be it a welcome desk, a sales counter, or an offi ce desk. Zenius weighs 3.3 kg (7.3 lbs) and is the lightest printer in its category.ECO-DESIGNEDZenius has earned the coveted ENERGY STAR certifi cation and complies with the reduced energy consumption guidelines from the ErP European Directive.SIMPLEC ard feeder and output tray located at the front of the printer M anual feeder C ontrol panel with LEDsnsite integration of specifi c modules*agnetic and smart card encoders can be combined within the same printer**Expert version and aboveFLEXIBLED irect access to portsO nsite integration of sp M agnetic and smart ca within the same printerr d P r i n t e r. A l l r i g h t s r e s e r v e d . A c t u a l p r o d u c t (s ) m a y d i f f e r f r o m i n f o r m a t i o n c o n t a i n e d i n t h i s d o c u m e n t . A l l i n f o r m a t i o n , s p e c i fi c a t i o n s o r g r a p h i c s a r e s u b j e c t t o c h a n g e w i t h o u t p r i o r n o t i c e . A l l t r a d e m a r k s m e n t i o n e d h e r e i n b e l o n g t o t h e i r r e s p e c t i v e o w n e r s . P i c t u r e s : O l i v i e r C a l v e z . 06/2011. K B -Z E N 1-65U S -A1 Under specifi c conditions /2 Depending on your Windows version /3 Requires .net 4.0 client profi le /4 For versions prior to Windows XP-SP2, please contact Evolis Services5 Available from November 2011 and for the “Expert” version or above /6 Expected by September 2011SPECIFICATIONSSingle-sided printing module, edge-to-edge printing Color-dye sublimation and monochrome thermal transfer 300 dpi print head (11.8 dots/mm) 16 MB of RAMPRINTING PERFORMANCESColor: from 120 to 150 cards per hour Monochrome: from 400 to 500 cards per hourCARD MANAGEMENT AND SPECIFICATIONSChoice of automated or manual feeding Feeder capacity: 50 cards (0.76 mm - 30 mil) Output tray capacity: 20 cards (0.76 mm - 30 mil)C ard thickness: 0.25 to 0.76 mm (10 to 30 mil), calibration via the gaugeT ypes of cards: all PVC, Composite PVC, PET, ABS and special varnish cardsC ard format: ISO CR-80 - ISO 7810 (53.98 mm x 85.60 mm - 3.375” x 2.125”)EVOLIS HIGH TRUST ® RIBBONSMaximize the quality and durability of printed cards, the lifespan ofyour print head and the overall reliability of your printer! A utomatic detection and setupR ibbon embedded in a cassette for ease of use R ibbon saver feature for monochrome printing R ibbon capacity:• YMCKO: 100 cards/roll • KO: 300 cards/roll• Monochrome ribbon: up to 1,000 cards per roll • Hologram ribbon: 400 cards/rollINTERFACESUSB 1.1 (compatible with 2.0)Ethernet available as an optionDISPLAYLEDsG raphic notifi cations from the printer : empty feeder, cleaning, “approaching end-of-ribbon” and “end-of-ribbon” warningsSOFTWARES upplied with the Evolis Premium Suite for Windows: • Printer driver• Evolis Print Center for printer management and setup • Evolis Printer Manager for two-way notifi cations • Supports Windows XP SP2 or later; Vista 32/64, W7 32/64 S upplied with the eMedia CS Card Designer (30-day free trial to be downloaded from Mediasoft’s website) O ther OS:• Mac and Linux: upon requestWARRANTY2 years (printer and print head)SIZE AND WEIGHTS ize: Height 195 mm (7.68”) x length 205 mm (8.07”) x width 310 mm (12.2”) W eight: 3.3 kg (7.3 lbs)SOUND (EVALUATED ACCORDING TO THE ISO 7779 STANDARD)Sound pressure level, LpAm, bystander position (YMCKO color mode)W hen operating: 46 dB (A) I n sleep mode: background noise onlySAFETYS upport for Kensington lock D ata encryption for magnetic encoding PACKAGING CONTENTP rinter C D-ROM with the printer driver and user manual C leaning kit U SB cable P ower supply and cordsOPTIONS & ACCESSORIESA vailable colors: Fire Red or Grey Brown E thernet TCP-IP E ncoding options , than can be combined. Upgrade can be carried out onsite, by adding new modules: • M agnetic stripe encoder, smart card contact station, smartcard encoder and contactless smart card encoder • Other encoders available upon requestECO-FRIENDLY DESIGN, CERTIFICATIONS AND STATEMENT OF COMPLIANCES leep mode and reduced energy consumption C E, FCC, IEC, VCCI, CCC , KCC E rP 2009/125/CE, ENERGY STAR, RoHSPOWERP ower supply: 100-240 V AC, 50-60 Hz, 1.8 AP rinter: 24 V DC, 3 AENVIRONMENTM in/max operating temperature: 15° / 30° C (59° / 86° F) H umidity: 20% to 65% non-condensing M in/max storage temperature: -5° / +70° C (23° / 158° F) S torage humidity: 20 to 70% non-condensing O perating ventilation: Open airRESIDENT FONTSA rial 100, Arial Bold 100B ar code: Code 39, code 128, EAN 13, Interleaved 2 of 5ECO-DESIGNEDS tandby and Sleep modesE NERGY STAR certifi cation C ompliance with the ErP European Directive N oise reduced to 46 dB (A) only。
Adobe Acrobat SDK 开发者指南说明书

This guide is governed by the Adobe Acrobat SDK License Agreement and may be used or copied only in accordance with the terms of this agreement. Except as permitted by any such agreement, no part of this guide may be reproduced, stored in a retrieval system, or transmitted, in any form or by any means, electronic, mechanical, recording, or otherwise, without the prior written permission of Adobe. Please note that the content in this guide is protected under copyright law.
华为IPS模块商品介绍说明书

IPS moduleHUAWEI IPS ModuleOverviewHuawei IPS module is a new generation of dedicated intrusion detection and prevention products. It is designed to resolve network security issues in the Web2.0 and cloud age. In the IPv4 and IPv6 network environment, the IPS module supports virtual patching, web application protection, client protection, malicious-software control, network application control, and network-layer and application-layer DoS attack defense.With the carrier-class high availability design, the IPS module can be inserted on switches, such as the S12700, S9700, and S7700, providing plug and play and scalability features. It can be deployed flexibly in multiple network environments. This module supports zero-configuration deployment and does not require complicated signature adjustment and manual setting of network parameters and threshold baselines to block service threats. Functioning with basic network devices, the IPS module comprehensively protects network infrastructures, network bandwidth performance, servers, and clients for large and medium-sized enterprise, industry, and carriers.Product FeaturesFlexible Deployment and Easy to Use•Uses software to adjust the networking, which simplifies the installation and deployment and frees the administrators from adjusting the complex cables. •Integrates networks with security using products from the same vendor, which facilitates unified management and simplifies the management. •Supports zero-configuration deployment and plug and play, and doesnot require complicated signature adjustment and manual setting of network parameters.•Provides diversified policy templates to simplify configurations in various scenarios and facilitate security policy customization.Accurate Detection and Efficient Threat Prevention•Detects attacks accurately without false positives with the advanced vulnerability feature detection technology.•Automatically learns the traffic baselines to prevent incorrect threshold configurations.•Automatically blocks major and severe threats without signature modification.Comprehensive Protection from System Service to Application Software•Provides traditional intrusion protection system (IPS) functions, such as vulnerability-based attack defense, web application protection, malware control, application management and control, and network-layer DoS attack defense.•Provides comprehensive protection for client systems exposed to the prevalent attacks that target web browsers, media files, and other document file formats.•Provides industry-leading defense against application-layer DoS attacks that spread through HTTP , DNS, or SIP .•Detects attacks and upgrades signatures in a timely manner with the global vulnerability trace capability.Application Awareness for Accurate Control of User Behaviors•Identifies more than 6000 network applications. With precise bandwidth allocation policies, the IPS module restricts the bandwidth used by unauthorized applications and reserves sufficient bandwidths for office applications, such as OA and ERP .•Monitors and manages various network behaviors, such as instant messaging (IM), online games, online video, and online stock trading. This enables enterprises to identify and prevent unauthorized network behaviors and better implement security policies.Specifications。
关于Gorgo蛇发女妖勒索病毒的安全预警及防范措施

关于Gorgo蛇发女妖勒索病毒的安全预警及防范措施一、威胁等级:★★★★Gorgo勒索病毒使用.net开发,运行之后使用AES算法加密受害者文件,使用RSA算法加密密钥,没有攻击者的RSA私钥无法解密文件。
Gorgo 勒索病毒与FilesLocker勒索代码非常相似,疑似FilesLocker招募到合作伙伴,据报道国内已经有部分企业感染此病毒。
二、背景介绍近日捕获到Gorgo勒索病毒,此病毒使用.net开发,运行之后使用AES 算法加密受害者文件,使用RSA算法加密密钥,没有攻击者的RSA私钥无法解密文件。
之前我们曾预警,FilesLocker勒索病毒作者在国内广泛招募合作伙伴,主要招募拥有大量肉鸡的攻击者和病毒传播技术的攻击者,如果一旦得逞,会有各种各样的犯罪分子,通过各种方法传播勒索病毒,未来可能会有很多精心编造的钓鱼邮件,各种吸引眼球的标题,诱导受害者下载运行勒索病毒。
果不其然,几个月后Gorgo勒索病毒出现,与FilesLocker勒索代码非常相似,疑似FilesLocker招募到合作伙伴。
据报道国内已经有部分企业感染此病毒,此病毒加密体系成熟,被加密后通常无法恢复,因此需要提高防范,防止被植入病毒。
三、技术分析拿到样本后,我们看到此病毒代码进行了一定的混淆图:经过混淆的病毒去混淆后发现和 FilesLocker 的代码非常相似图:去混淆后的Gorgo勒索原版的FilesLocker勒索代码结构图:原版的FilesLocker勒索Gorgo勒索代码核心代码图:Gorgo勒索代码FilesLocker勒索核心代码图:FilesLocker勒索代码病毒运行后首先以最快速度加密受害者用户目录,用户目录包括桌面、文档等,通常存放重要文件的目录图:首先加密用户目录文件然后再遍历全盘加密文件图:遍历全盘文件遍历文件时会选择指定后缀图:遍历文件类型图:加密的文件类型病毒加密的文件类型,完整列表如下".gif", ".apk", ".groups", ".hdd", ".hpp", ".log", ".m 2ts", ".m4p", ".mkv",".mpeg", ".epub", ".yuv", ".ndf", ".nvram", ".ogg", ". ost", ".pab", ".pdb",".pif", ".png", ".qed", ".qcow", ".otp", ".s3db", ".qc ow2", ".rvt", ".st7",".stm", ".vbox", ".vdi", ".vhd", ".vhdx", ".vmdk", ".v msd", ".psafe3", ".vmx",".vmxf", ".3fr", ".3pr", ".ab4", ".accde", ".accdr", " .accdt", ".ach", ".acr",".sd0", ".sxw", ".adb", ".advertisements", ".agdl", ".a it", ".apj", ".asm",".awg", ".back", ".backup", ".sti", ".oil", ".backupdb" , ".bay", ".bdb",".bgt", ".bik", ".bpw", ".cdr3", ".cdr4", ".cdr5", ".c dr6", ".ycbcra",".cdrw", ".ce1", ".ce2", ".cib", ".craw", ".crw", ".cs h", ".csl",".db_journal", ".dc2", ".pptm", ".dcs", ".ddoc", ".ddrw ", ".der", ".des",".dgc", ".djvu", ".dng", ".drf", ".eml", ".ppt", ".erb sql", ".erf", ".exf",".ffd", ".fh", ".fhd", ".flp", ".gray", ".grey", ".gry ", ".hbk", ".ibd",".7z", ".ibz", ".iiq", ".incpas", ".jpe", ".kc2", ".kd bx", ".kdc", ".kpdx",".ldf", ".lua", ".mdc", ".mdf", ".mef", ".config", ".m fw", ".mmw", ".mny",".mrw", ".myd", ".ndd", ".nef", ".nk2", ".nop", ".vb", ".vip", ".vbs", ".sln",".dxg", ".bat", ".cmd", ".jar", ".c4d", ".ape", ".nrw" , ".ns2", ".ns3", ".ldf",".ns4", ".nwb", ".nx2", ".nxl", ".nyf", ".odb", ".odf" , ".odg", ".odm", ".orf",".otg", ".oth", ".py", ".ots", ".ott", ".p12", ".p7b", ".p7c", ".pdd", ".pem",".plus_muhd", ".plc", ".pot", ".pptx", ".py", ".qba", ".qbr", ".qbw", ".qbx",".qby", ".raf", ".rat", ".raw", ".rdb", ".rwl", ".rwz" , ".conf ", ".sda", ".sdf",".sqlite", ".sqlite3", ".sqlitedb", ".sr2", ".srf", ".s rw", ".st5", ".st8",".std", ".stx", ".sxd", ".sxg", ".sxi", ".sxm", ".tex" , ".wallet", ".wb2",".wpd", ".x11", ".x3f", ".xis", ".ARC", ".contact", ". dbx", ".doc", ".docx",".jnt", ".jpg", ".msg", ".oab", ".ods", ".pdf", ".pps" , ".ppsm", ".prf", ".pst",".rar", ".rtf", ".txt", ".wab", ".xls", ".xlsx", ".xml ", ".zip", ".1cd", ".3ds",".3g2", ".7zip", ".accdb", ".aoi", ".asf", ".asp", ".a spx", ".asx", ".avi",".bak", ".cer", ".cfg", ".class", ".cs ", ".css", ".c sv", ".db", ".dds", ".dwg",".dxf", ".flf", ".flv", ".html", ".idx", ".js", ".key" , ".kwm", ".laccdb", ".lit",".m3u", ".mbx", ".md", ".mdf", ".mid", ".mlb", ".mov", ".mp3", ".mp4", ".mpg",".obj", ".odt", ".pages", ".php", ".psd", ".pwm", ".rm ", ".safe", ".sav", ".save",".sql", ".srt", ".swf", ".thm", ".vob", ".wav", ".wma" , ".wmv", ".xlsb", ".3dm",".aac", ".ai", ".arw", ".c", ".cdr", ".cls", ".cpi", ".cpp", ".cs", ".db3", ".docm",".dot", ".dotm", ".dotx", ".drw", ".dxb", ".eps", ".fl a", ".flac", ".fxg", ".java",".jtp", ".m", ".m4v", ".max", ".mdb", ".pcd", ".pct", ".pl", ".potm", ".potx",".ppam", ".ppsm", ".ppsx", ".pptm", ".ps", ".r3d", ".r w2", ".sldm", ".sldx", ".svg",".tga", ".wps", ".xla", ".xlam", ".xlm", ".xlr", ".xls m", ".xlt", ".xltm", ".xltx",".xlw", ".act", ".adp", ".al", ".dip", ".docb", ".frm" , ".gpg", ".jsp", ".lay",".lay6", ".m4u", ".mml", ".myi", ".onetoc2", ".PAQ", " .ps1", ".sch", ".slk", ".snt",".suo", ".tgz", ".tif", ".tiff", ".txt", ".uop", ".uot ", ".vcd", ".wk1", ".wks", ".xlc"使用AES算法ECB模式加密文件,使用RSA算法加密AES密钥图:加密算法读文件,调用加密函数加密后写入原始文件并重命,追加上勒索后缀“.[*******************]”图:加密文件,修改后缀被加密文件后缀图:被加密文件后缀文件被加密后,内容无法查看图:被加密的文件内容删除系统自带的备份图:删除系统自带备份弹出勒索窗口,使用中英韩三国语言图:弹出勒索窗口弹出的勒索窗口界面图:勒索窗口同时在桌面释放,中英韩三国语言的勒索文本图:勒索文本四、防范措施1、攻击者可以通过各种方式投递病毒,因此需要进行全面的防御,才可以最大限度的防止被病毒攻击2、对于以假乱真的钓鱼邮件,要提高警惕。
3GPP 5G基站(BS)R16版本一致性测试英文原版(3GPP TS 38.141-1)
4.2.2
BS type 1-H.................................................................................................................................................. 26
4.3
Base station classes............................................................................................................................................27
1 Scope.......................................................................................................................................................13
All rights reserved. UMTS™ is a Trade Mark of ETSI registered for the benefit of its members 3GPP™ is a Trade Mark of ETSI registered for the benefit of its Members and of the 3GPP Organizational Partners LTE™ is a Trade Mark of ETSI registered for the benefit of its Members and of the 3GPP Organizational Partners GSM® and the GSM logo are registered and owned by the GSM Association
IBM Cognos Transformer V11.0 用户指南说明书
Kaspersky KIPS产品说明书

An effective way of building cybersecurity awareness among top managers and decision makersLearn more on/awarenessKaspersky Interactive Protection SimulationKaspersky Interactive Protection SimulationWhat is KIPS?Kaspersky Interactive Protection Simulation (KIPS) is a part of Security Awareness portfolio that offers a range of highly engaging and effective training solutions that boost the cybersecurity awareness of your staff so that they all play their part in the overall cybersafety of your organization.While nowadays more and more executives recognize the importance of cybersecurity it's still a challenge for those tasked with education to involve them in training and turn into real supporters of cybersecurity initiatives.KIPS is a strategic business simulation, a team game that demonstrates the connection between business efficiency and cybersecurity. Game-based learning helps to engage decision-makers in cybersecurity and motivate them to take further steps in building a cybersafe corporate environment.KIPS is an exercise that places business decision makers as members of IT security teams into a simulated business environment facing a series of unexpected cyberthreats where their main goal is to keep company working and get revenue.The idea is to build a cyber defense strategy by making choices from amongst the best pro-active and re-active controls available. Every reaction made by the teams to the unfolding events changes the way the scenario plays out, and ultimately how much profit the company makes or fails to make.Balancing engineering, business, and security priorities against the cost of a realistic cyberattack, the teams analyze data and make strategic decisions based on uncertain information and limited resources. If that sounds realistic, it should do, because each of the scenarios is based on real-life events.Why KIPS is an effective exercise?KIPS training is targeted at business system experts, IT people and line managers, and should increase their awareness of the risks and security problems of running modern computerized systems.Each of the competing teams of 4–6 people is tasked with running a business consists of some production facilities and computers controlling it. During the rounds of the game, production facilities generate revenues / public welfare / business results. However, the teams also have to face cyberattacks potentially impacting enterprise performance.In order to defend their enterprise, each team has to take strategic, managerial and technical decisions while taking operational constraints into account and maintaining a high level of revenue.KIPS game is a dynamic awareness program based on “learning by doing”:• Fun, engaging and fast (2 hours).• Team-work builds cooperation.• Competition fosters initiative & analysis skills.•Gameplay develops understanding of cybersecurity measures.After the KIPS Game, players come to the important and actionable conclusions for their everyday job:• Cyberattacks hurt revenues, and need to be addressed from top-management level.• Cooperation between IT and Business people is essential for cybersecurity success.• Effective security budget is much smaller than revenue you risk losing, and does not require millions.• People get used to particular security controls and its importance (audit training, anti-virus, etc).The “people problem”One of the biggest security challenges is that different senior management roles view cybersecurity from dfferent perspectives, and have different priorities. This can result in a sort of decision-making “Security Bermuda Triangle”:• Business see security measures as a contradiction to their business goals (cheaper/faster/better).• IT Security Managers may feel that cybersecurity as an infrastructure andinvestment issue moves outside their remit.• Managers tasked with cost control may not see how cybersecurity spending relates to revenues and saves rather than generates cost.Mutual understanding and partnership between these 3 are crucial to successful cybersecurity. However, traditional awareness formats, like lectures and red/blue exercises, are flawed: lengthy, overtechnical, and unsuited to busy managers, and they fail to build “common language” at the common sense level.Engagement/ motivationStarting pointLearningReinforcementContinuous learning cycleransomware, APTs, automation security flaws.from high-level emerging APTs, like Tyukpin, Carbanak.from website deface to a highly actual ransomware and a sophisticated APT.from attacks and exploits.Power stationWater plantProtecting industrial control systems and critical infrastructure from Stuxnet- style cyberattack.Protecting IT infrastructure of water purification plant insuaring stable work of 2 production line.Petroleum holdingMaintaining cybersecurity to protect the revenue of the global Oil&Energy company, having offices all over the world new branch of a large petrochemical holding, focusing on ethylene production.AirportHeartbleed, APT, B2B Ransomware, Insider.Ensuring the safety of passengers and timely delivery of goods at the airport, protecting its assets from numerous cyberattacks and threats.KIPS training shows to participants:• A real role of the cybersecurityin business continuity and profitability.• Highlights the emerging challenges and threats that are coming in nowadays.• What are the typical mistakescompanies are doing when building the cybersecurity.• What kind of cooperation between business and security teams can help to maintain the stable operations of the enterprise and sustainability to the cyberthreats.As the enterprise experiences acyberattack, the players experiencethe impact on production and revenues, and learn to adopt different business and IT strategies and solutions in order to minimize the impact of the attack and to earn more money.Each of the scenarios focuses on the respectful thereat vectors, allows discovering and analyzing the typical mistakes in building the cybersecurity and incident response procedures in the corresponding industry.In 2019 was developed new scenario with a particular focus on protecting personal data for Local Public Administrations (LPA). Along with series of exercises and training units, KIPS LPA enables public administration employees not onlyto understand cybersecurity challenges, but also to transform that understanding into positive behavior models. The training also stresses how important teamwork and appropriate responsibility sharing can be and how they can help LPAs make better decisions for the security and safety of their citizens.Over the past couple of years we'veadded 3 more highly requested scenarios: Airport, Petrochemical industry and Petroleum holding.According to the scenarios each team is responsible for IT security of thecompany occupied in the respective area. The task of the teams is to ensure normal functioning, safe stable work of thecompany maintaining good relationships with customers and suppliers, finding and neutralizing cyberthreats.Enterprise KIPS scenarios for all vertical sectorsReferences and case studiesKIPS Game was played by industrial security professionals from 50+ countries.• KIPS has been translated to English, Russian, German, French, Japanese, Spanish EU, Spanish LA, Portuguese, Turkish, Italian.• KIPS was used by government agencies such as CyberSecurity• Malaysia, Czech’s NSA, Netherlands Cyber Security Centrum, to boost the awareness in the Critical Infrastructures, training hundreds of experts from national critical infrastructure companies.• KIPS is used in enterprises like BASF (world top chemical manufacturer),CERN (Large Hadron Collider), Mitsubishi, Yokogawa, RusHydro, Panasonic, ISA (International Society of Automation), to train their own engineers, developers, customer-facing personal to note and take care about cybersecurity in the industrial automation environments.• KIPS is licensed by leading education authorities like SANS Institute, used in the cybersecurity training programs delivered to SANS students worldwide.• KIPS has been licensed by Security service providers and vendors, includingMitsubishi-Hitachi Power Systems, to be used as the training course for the end-customers from the Critical Infrastructure sectors.Two forms of KIPS trainingKIPS liveMore limitations, but stronger engagement due to on-site presence and face-to-face competition. Plays as a team-building event as well. • Up to 80 trainees in the same room.• The same language for all participants.• A trainer and an assistant on site.•Printed materials are essential.KIPS onlinePerfect for global organizations or public activities. Can be combined with KIPS Live to add some remote teams to the on-site event.• Up to 300 teams (= 1000 trainees) simultaneously, from any location.• Different teams can choose a game interface in different languages. • A trainer leads a session via WebEx.Train-the-trainer availableFor the cases when the customer want to use KIPS to train a wider number of employees, managers and experts from multiple departments or sites, it may be useful to purchase the license to KIPS training, educate internal trainers and run KIPS sessions at the customer own pace and convenience.Such license is available from Kaspersky and includes:• The right to use the KIPS training program internally.• The set of training materials and the right to use/reproduce it.• Login/password for the KIPS software server.•Trainer’s guide, education and training for program leaders o/n how to run KIPS training.• Maintenance and support (updates and support for KIPS software and training content).• Optional customization of the KIPS Scenario (extra fee applies).Quotes and references on KIPS gameThe Kaspersky Industrial Protection Simulation was a real eye-opener and should be made mandatory for all security professionals.Warwick Ashford, Computer WeeklyWe at CERN have a huge number of IT and engineering systems, with thousands of people working on them. Thus, from a cybersecurity perspective, increasing awareness and engaging people to take care about cybersecurity is as crucial as the technical controls. Kaspersky trainingproved to be engaging, bright and efficient.Stefan Luders,CERN CISOIt was truly eye-opening and a number of the participants asked about using this game at their companies.Joe Weiss PE,CISM, CRISC, ISA FellowWe have to build a network of people based on affiliation and cooperation and the KIPS is a perfect way how to kick it off.Daniel P. Bagge,Národní centrum kybernetické bezpeč nosti, Chezh RepublicRecommendations on how to prepare for KIPS sessionSchedule: Plan KIPS as separate event, or session inside existing event/ conference/seminar (in this case the optimum time for KIPS is the evening of the first day).Group: 20–100 people, split into teams of 3–4 people, ideally each team is a mix of people from Management, Engineers, CISO/IT Security:• it is better to have at least 1 member from each role/function,• teams may consist of people from different or the same company/ department,• people may know each other, or may not.Setup: The game takes 1,5 – 2 hours, but the room must be available to Kasperskyfacilitator team for 2 hours prior to the game for preparation and setup.Room: Plan ~3m2/person, no columns,regular form AV Equipment: Projector (6–8 lumens), Screen, Sound system (speakers, remote control, microphones).Wi-Fi with internet access (for KIPS game server access), from 4Mbps iPad per each team (4 persons) with Wi-Fi support or other tablet.Furniture: Tables of participants for 4 people (rectangular size not less than 75x180 cm, or round with no more than 1.5 m diameter), Participants should sit in groups of 4 at the tables. Tables for co-host, Chairs on the number of participants at the tables.Kaspersky Security Awareness – a new approach to mastering IT security skillsKaspersky Security Awareness offers a range of highly engaging and effective training solutions that boost the cybersecurity awareness of your staff so that they all play their part in the overall cybersafety of your organization. Because sustainable changes in behavior take time, our approach involves building a continuous learning cycle that includes multiple components.Engagement/ motivation Starting point Learning Reinforcement –Why do I need this?–Cognition–Am I aware? –What do I know and where are the gaps?–Micro learning –Continuous learning –Adaptivity–Did I get it right? –Do I remember this? –Do I act accordingly?Continuous learning cyclel a t f o rmDifferent training formatsfor different organizational levelsKey p rogram differentiatorsSubstantial cybersecurity expertise20+ years’ experience in cybersecurity transformed into a cybersafety skillsetthat lies at the heart of our productsTraining that change employees’ behavior at every level of your organizationOur gamified training providesengagement and motivation throughedutainment, while the learning platforms help to internalize the cybersecurity skillset to ensure that learnt skills don’t get lost along the way.© 2021 A O K A S P E R S K Y L A B . R E G I S T E R E D T R A D E M A R K S A N D S E R V I C E M A R K S A R E T H E P R O P E R T Y O F T H E I R R E S P E C T I V E O W N E R S .Enterprise Cybersecurity: /enterpriseKaspersky Security Awareness: /awareness。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Automated False Track IdentificationKenneth PackScience Applications International Corporation 400 Virginia Avenue SW, Suite 800Washington DC 20024Abstract1Suboptimized real-time surveillance systems trade off reporting all targets in the surveillance volume against minimizing the number of false tracks. Analysis of archived data can identify false tracks. By automating the analysis, system optimization can be done sooner. Automated analysis identifies candidate false tracks using track characteristics over the life of the track. These characteristics depend on the sensor data and operational environment. This paper discusses automated false track identification of ASDE-X (Airport Surface Detection Equipment Model X ) tracks collected at multiple airports. These tracks are supported by radar and multilateration sensor data.IntroductionMany real-time systems, including ASDE-X, fuse multiple detections from one or more sensors to form target tracks. Sometimes, ASDE-X displays a non-existent, or false target. When a vehicle or aircraft transmits a Mode-A or ICAO2 identifier, ASDE-X uses the identifier to tag the target. For this paper, the false track definition is extended to include tracks having a wrong position3, and tagged tracks having a wrong identifier.The ASDE-X system1 has one or more surface movement radars (SMR) and a multilateration subsystem. At airports where an ASDE-3 radar is available, ASDE-X uses the ASDE-3 radar instead of installing a new SMR radar. ASDE-X integrates data from the airport surveillance radar (ASR) with its own sensor data to detect, identify 1 This work was partially supported by the Federal Aviation Administration under FAA Contract DTFA01-01-0-0021.2 ICAO: International Civil Aviation Organization. Mode-S transponders transmit ICAO identifiers.3 For example, a plane with its transponder on might generate a multipath track on a taxiway.and track aircraft and ground vehicles in the surveillance volume. The multilateration subsystem uses signals from aircraft Mode-A and Mode-S transponders to identify and locate aircraft and transponder equipped vehicles. The multilateration subsystem locates the transponders, using the time difference of arrival of the transponder's signal received at multiple sensors. The ASDE-X surveillance volume includes the airport taxiways, runways, and approach corridors.In ASDE-X, target tracks can be either displayed or not displayed. The system is configured to not display targets in the gate area. For false track analysis, the gate area is considered outside the surveillance volume. Undisplayed tracks and sensor position estimates, called plots, are available for analysis throughout the surveillance volume and the gate area. All displayed tracks are updated once a second. If there are no new supporting plots, the track's position is updated based on its previous location, course, and speed.During system optimization, analysts adjust configuration parameters to minimize the number of false targets without losing real targets. The optimization process uses archived data collected 24 hours a day, seven days a week for several months. With archived data, the entire track history of each target can be reviewed multiple times by several analysts. Details of track initiation, movement, track features, and track death are kept in the archives. Since truth about the real targets present is not available, differentiating between real and false targets can be a time consuming process. Rule Development for Identifying False TracksFor targets of opportunity, false track identification is based on events or features that deviate significantly from those of a typical real target. Fortunately, at airports, airplane and ground1vehicle tracks have predictable events and identifiable features. These targets enter and leave the surveillance volume along its edge. Tracks of real targets tend to be contiguous. During their track life, aircraft typically travel on a runway. On the runway, they either decelerate or accelerate to a relatively high speed. Landing and departing aircraft have surface radar, ASR radar, and multilateration support during their track life. Ground vehicles travel along the taxiways, runways and access roads in the airport movement area. Parked vehicles in the movement area eventually move when maintenance personnel have finished their work.At a mid-sized airport, during the busiest hours of a day, the average number of aircraft arriving can be 10 to 20 per hour. At a large busy airport, the average number of aircraft arriving can be more than one per minute for over 10 hours. On average, the same number of aircraft leave as arrive. In addition to aircraft, maintenance vehicles travel throughout the movement area.Because it takes time to identify false tracks, analysts developed rules to improve their productivity. These rules evolved over time. The relative usefulness of the rules changed as ASDE-X changed. For example, searching for tracks that existed a long time without sensor support was once a good rule for finding false tracks. However, the default configuration now terminates unsupported tracks more quickly.When a new rule is coded into either a MATLAB script or a compiled program, it is evaluated using a binary hypothesis test. The two possible outcomes are:(1)The rule identifies a track as false whenthere is a consensus among analysts thetrack is false.(2)The rule identifies a track as false whenthere is a consensus among analysts thetrack is real.Since a false track can theoretically be missed, a set of tracks is sometimes manually searched for false tracks missed by all the coded rules.Often a false track identification rule classifies a track as false when it is real. Some rules have fewer misclassifications than others. Todifferentiate between rules with better prediction rates than those more likely to misclassify a real target, the program assigns a low or high confidence to each false track prediction. When an analyst has time, all the predicted false tracks can be evaluated; otherwise, only the high confidence predictions are evaluated.The features used by the false track identification algorithm can be categorized into:(1)track life,(2)track proximity,(3)sensor specific features, and(4)track dynamics.Track life features include how long the track existed, how long the track was displayed, and the time between when the track was initiated and when it was first displayed.Track proximity features include the number of tracks that were close to the track of interest, and whether the track initiated or terminated close to another track. Track proximity features for pairs of tracks that were once close to each include the number of times the two tracks were near each other. Rules based on track proximity find radar splits and duals. A radar split occurs when an aircraft is detected by the surface radar as two or more plots, and ASDE-X creates a track for each plot. A dual occurs when two sensors, such as multilateration and a radar each detect the same target, but ASDE-X creates a separate track for each sensor.Sensor-specific features include identifying which sensors supported a track, and when each sensor first supported that track. The ASR and multilateration systems associate a Mode-A code with the tracks they report. These codes tend to be unique, so two tracks should not simultaneously have the same code4. The multilateration system associates ICAO codes with Mode-S equipped targets. These codes are unique. The surface radar provides target extent. The larger a target is in range and azimuth, the less likely it is to be a multipath false track.4 There are cases where multiple transponders are either assigned a non-discrete code or the pilot has entered the wrong Mode-A code in the transponder.2Track dynamic features include the distance the track traveled over its lifetime, where the track started, where it ended, whether it was ever in a near runway region, whether it was ever on a runway, and whether it ever traveled fast. If the track was on a runway, the speed at which the track entered and exited the runway are included in the dynamic feature set.As with the rules, the features were identified by analysts searching for clues as to why a track should or should not be classified as false. In general, the more relevant features identified, the more likely a track is correctly classified by the automated false track identification program.During rule development, analysts identified rules that are more relevant in one region of the airport than in another. Currently, the rules use three regions: called runway, near runway, and nuisance. Each region is made up of one or more polygons. The polygons do not have to be connected. For example, the runway region covers each runway. The near runway region typically covers each runway and extends 500 feet from the runway edges. This region can be modified to adjust the sensitivity of the rules that depend on it. For example, many rules expect real targets, while in a near runway region, to have tracks that are updated each cycle with supporting plots. The third region is the nuisance region. This region is used to identify construction zones, where barricades and construction equipment make it difficult to identify false tracks.It is possible the automated false track program will miss one or more false tracks. The analyst must choose between reviewing every detail of the archived data for a limited time period, or to examine as much data as the analyst's schedule permits. It takes time for all combinations favorable to false track formation to manifest themselves at an airport. False tracks formation depends on the relative geometry of aircraft, vehicles, fixed structures, radar, and multilateration sensor units. The traffic flow in one direction sets up false track conditions different from those in the opposite direction. Multipath conditions can depend on large aircraft parking at a particular gate. Whereas weak transponders are difficult to detect, powerful ones at the same location can generate multilateration false plots. Some aircraft have only a bottom mountedantenna connected to their transponder. Multipath MLAT tracks tend to form more often on signals from these aircraft than with aircraft having top mounted antennas or dual antennas. Some transponders possibly do not meet their specifications2. False track formation also depends on rain, snow, and sometimes, grass that needs to be mowed.RulesAs previously mentioned, candidates identified by some rules are more likely to be false tracks than those predicted by other rules. The purpose of false track analysis is to improve ASDE-X's performance. False track analysis was automated so more data could be analyzed, reducing the time to optimize each new installation and evaluate upgrades at existing sites.The composite rule set is designed to find as many false tracks as possible while minimizing the number of real targets incorrectly tagged false. Due to the interaction between analysis and development, lessons learned from false track analysis generate ASDE-X software and adaptation changes. It is expected that many of the current high confidence rules used in the automated false track identification software will be modified or replaced in the future. Historically, the most likely modification is to add more tests to each rule.The prediction rules are listed below. Each rule is summarized by the type of false track it is designed to identify.(1) Static SMR MPThis rule is designed to identify false tracks due to static multipath. Multipath can be either static or dynamic. When the multipath track remains stationary, it is static. If the multipath track moves, it is dynamic. Static multipath can be due to fixed structures or parked aircraft in the gate area. This problem is worse when an airport terminal is between the SMR radar and the airport movement area, than for other geometries. The rule also finds false tracks due to snow banks, pooled rain water on the movement area, and other non-vehicle reflectors. In the spring and summer, it has found false tracks from tall grass growing along a taxiway.3A track is predicted to be static SMR MP if:•it has SMR support,•it is a small target,•it ends near where it starts, and•its average speed is less than a slow speed threshold.If the track has SMR support, ends near where it starts, and its average speed is below the slow mover threshold, but it is not a small target, then the rule predicts the track is false, but assigns a low confidence to the prediction.Alternatively, if three or more tracks "pass through" a track, the program predicts the passed through track is a multipath false track. The pass through criteria is that the tracks come within 80 feet of each other.(2) Dynamic SMR MPThis rule is designed to identify false tracks created by dynamic SMR multipath. Dynamic multipath occurs when at least one of the reflectors moves. Dynamic multipath tracks often occur when either the primary reflector is in a region masked out by the radar processor or the system has underestimated the extent of the primary reflector. The primary reflector is a reflector between the radar and the false track. In either case, the operational system fails to identify the false track as multipath.A track is predicted to be dynamic SMR MP if:•it has SMR support•it is a small target•it is unsupported for multiple consecutive track updates,•at least one of the unsupported updates is ina near runway region, and•it is either unsupported for most of its life or its life is short.This rule illustrates that not all false tracks are treated the same. Those closer to or on a runway are more serious than those far from a runway. This rule misses dynamic SMR multipath tracks occurring outside the near runway region. Depending on time constraints, the analyst can expand or contract the near runway region to coverall taxiways or concentrate on the movement area closer to the runways.(3) MLAT MP CriteriaThis rule is designed to identify false tracks created when the position estimate is corrupted by multipath signals at one or more of the multilateration receivers.A track is predicted to be MLAT multipath if:•it has had MLAT support,•it does not have a long period withconsecutive MLAT supported updates, •after the first MLAT supported update, less than a third of the track updates haveMLAT support, and•for much of its life, the track is unsupported by any sensor.(4) Duplicate IDThis rule identifies when two tracks have the same aircraft identifier (ACID). Duplicate identifiers occur when one track steals the ACID of another.The rule is invoked when either:•two tracks have the same ACID at the same time, or•one track ends within a couple seconds of the second track's start, and•both tracks have the same ACID.(5) Multiple ACIDThis rule identifies when a track has more than one ACID during its lifetime. Multiple ACIDs occur when a track misassociates with the multilateration or ASR support for another target.(6) Arriver DualThis rule is designed to identify handoff failures between the ASR and surface radar for an arriving aircraft.This rule has three parts:•Unsupported Arriver,•Track Initiated on Runway, and•Pairing4A track is tagged an unsupported arriver if either•it enters a runway region,•it has multiple ASR supported updates,•it travels over 10,000 feet,•it is tracked for at least a minute,•its last support is from an ASR, and•its last update is unsupported by anysensors,or•it has multiple ASR supported updates,•it travels over 10,000 feet,•it is tracked for at least a minute, and•its average speed is above a high speed threshold.A second track is tagged as initiated on a runway if•its initial report is on a runway,•it lives long enough, and• a sufficient percentage of its updates have sensor support.For this rule, the minimum time an initiated on runway track needs to live is 45 seconds. The longer a target lives, the more unsupported updates it may have and still be used in the pairing rule.The second track is identified as a dual and paired with the first if•both tracks are ever in a near runwayregion,•the second track starts within 30 seconds after the first track enters a near runwayregion, and•the first track, when it entered the nearrunway region, is near where the secondtrack starts.(7) Coasted DepartureThough this rule sometimes finds duals formed on departure, it more often finds aircraft departing without their transponder on and small aircraft that bank too sharply for the tracker to associate new reports with the existing target track.A track is flagged as having a coasted departure if•it travels a long distance in its lifetime,•it lives over a minute,•it has few or no plots with ASR support,•it dies without sensor support, that is itcoasted,•it leaves a runway at a high speed, and•it has multiple updates when it is travelling above a high speed threshold.(8) ASR DualThis rule is designed to detect an ASR/MLAT dual when an airplane is flying.Two tracks are flagged as duals when at least one of the tracks has 25 or more updates where •both tracks are travelling at a high speed,•neither track has an invalid Mode-A code or ICAO code,•neither track has SMR support, and•the tracks are near each other.(9) ASR MisassociationThis rule is designed to detect when an ASR plot associates with the wrong track.A track is predicted to be false if•it initiates with non-ASR sensor support,•it has multiple updates before getting any ASR supported updates,•it has only a few ASR supported updates,•most of its updates are unsupported.(10) ASR MultipathThis rule is designed to detect when ASR multipath plots form a track.A track is predicted to be false if•it initiates with ASR support•it has only a few ASR supported updates, and•most of its updates are unsupported.(11) MLAT DualThis rule is designed to detect SMR/MLAT duals. This rule first searches for pairs of tracks that were close to each other. If the pair were close to5each for a significant number of updates, then the pair is flagged as potential split track pair.The pair is flagged as a dual if•one of the tracks has multiple unsupported updates and its last update is unsupported, •one of the tracks starts within 300 feet of where the two tracks were first close toeach other, and•after the tracks have been within 100 feet of each other for at least 20 updates, they aremore often within 100 feet of each otherthan apart by more than 100 feet,•one of the tracks has multilaterationsupport, and•the first MLAT supported update occurs within five seconds of the first time thetracks are close to each other.(12) Radar SplitThis rule is designed to detect false targets due to the radar reporting multiple plots for an aircraft. The rule first searches pairs of tracks. If either track has many updates close to the other, the pair becomes a potential split track pair.The pair is flagged as a split if•one of the tracks has multiple unsupported updates and its last update is unsupported, •one of the tracks starts within 300 feet of where the two tracks were first close toeach other, and•after the tracks have been within 100 feet of each other for at least 20 updates, they aremore often within 100 feet of each otherthan apart by more than 100 feet, and •neither track has MLAT support.(13) MisassociationThis rule identifies when a sensor plot from one target associates with the track of another target and causes the second track's position to be wrong.The rule first searches pairs of tracks. If either track has many updates close to the other, the pair becomes a potential split track pair.The rule then checks each potential split using the following three tests. If the pair meets all thecriteria of any one test, the pair is flagged as a misassociation.(1) The pair is flagged as a misassociation if•one of the tracks has multiple unsupported updates and its last update is unsupported, •one of the tracks starts within 300 feet of where the two tracks were first close toeach other, and•after the tracks have been within 100 feet of each other for at least 20 updates, they aremore often within 100 feet of each otherthan apart by more than 100 feet.(2) The pair is flagged as a misassociation if•one of the tracks has multiple unsupported updates and its last update is unsupported,and•the two tracks are close to each other forover a hundred updates.(3) The pair is flagged as a misassociation if•either track is a landing or departingaircraft.(14) ClutterIf a track is in multiple potential split track pairs, it is categorized as clutter.(15) No SMR SupportThis rule predicts tracks that never had SMR support are false.(16) Initiated on RunwayThis rule is designed to detect tracks having non-normal behavior and not categorized by other rules. This rule predicts a track is false if it initiates on a runway. Sometimes tracks tagged via this rule are matched with arrivers having no support; together the pair form a dual.(17) Late DisplayThis rule is designed to detect tracks having non-normal behavior and not categorized by other rules. This rule predicts a track is false if the track is on a runway shortly after it started. The6effectiveness of this rule depends on how close the runways are to the terminal area, and the minimum time threshold that determines whether or not the track reached the runway too quickly.(18) Dropped TrackThis rule is designed to detect tracks having non-normal behavior and not categorized by other rules. These tracks are sometimes created by a misassociation, but were not caught by the misassociation logic.A track is predicted to be false if•it did not travel at a high speed•it lived over a minute•it traveled more than a minimum distance•it ended in a near runway region. SummaryThis paper presents an approach used to find false tracks in ASDE-X data collected during site optimization. The data consists of targets of opportunity and false tracks. Rules, used in an automated false track identification program, are provided. These rules were developed based on a profile of normal aircraft and vehicle tracks. The candidate tracks output by the program are reviewed by an analyst to verify whether or not they are false.AcknowledgementIt is a pleasure to acknowledge the hard work done by Hong Kaing building the software and regression testing the algorithms. I am also grateful to insights provided by George Go, cataloging the different types of radar false tracks and characteristics useful for identifying them. I wish to thank Karim Belamqaddam, Matias Palavecino, and Mark Scheufler for their evaluations of the tracks identified by the false track identification software.2007 ICNS Conference1-3 May 20071 National Airspace System (NAS) SubsystemLevel Specification for Airport Surface DetectionEquipment Model X (ASDE-X), FAA-E-2942Department of Transportation, Federal Aviation Administration, Version 1.1, August 13, 20012 Talotta, Nicholas J., et al, "A Field Study of Transponder Performance in General Aviation Aircraft",U.S. Department of Transportation, Federal Aviation Administration, DOT/FAA/CT-97, December 5, 19977。