输入信号端口分配表
单片机-04_端口输入输出
XBR0:端口I/O 交叉开关寄存器0
位2: UART0EN:UART0 I/O 使能位。 0:UART0 I/O 不连到端口引脚。 1:UART0 的TX 连到P0.0,RX 连到P0.1
XBR0:端口I/O 交叉开关寄存器0
位1: SPI0EN:SPI 总线I/O 使能位。 0:SPI0 I/O 不连到端口引脚。 1:SPI0 的SCK、MISO、MOSI 和NSS 连到4 个端口引脚。 位0: SMB0EN:SMBus 总线I/O 使能位 0:SMBus0 I/O 不连到端口引脚。 1:SMBus0 的SDA 和SCL 连到2 个端口引脚。
XBR1:端口I/O 交叉开关寄存器1
位7: SYSCKE:/SYSCLK 输出使能位 0:/SYSCLK 不连到端口引脚。 1:/SYSCLK 连到端口引脚。 位6: T2EXE:T2EX 使能位 0:T2EX 不连到端口引脚。 1:T2EX 连到端口引脚。
XBR1:端口I/O 交叉开关寄存器1
当系统中不同器件的端口引脚有共享连接,即多个输出连接 到同一个物理线时(例如SMBus 连接中的SDA 信号), 使用漏极开路方式可以防止不同器件之间的争用。
端口0-3 引脚的输出方式由PnMDOUT 寄存器中的对应位决 定
P0:端口0 寄存器
位7-0: P0.[7:0]:端口0 输出锁存器位。
第三章
端口输入/输出
C8051F020/1/2/3 MCU 是高集成度的混合信号片上系统, 有按8 位端口组织的64 个数字I/O 引脚(C8051F020/2)或 32 个数字I/O 引脚(C8051F021/3)。 低端口(P0、P1、P2 和P3)既可以按位寻址也可以按字 节寻址。高端口(P4、P5、P6 和P7)只能按字节寻址。 P0:80 P1:90 P2:0A0 P3:0B0 P4:84 P5:85 P6:86 P7:96 所有引脚都耐5V 电压,都可以被配置为漏极开路或推挽输 出方式和弱上拉。端口I/O 单元的输出驱动原理框图示于图 3.1。
电动机正反转io分配表

电动机正反转io分配表
在设计 PLC 控制系统时,为了控制电动机的正反转,需要使用IO 地址分配表来分配 PLC 输入和输出信号。
以下是一个基本的电动机正反转 IO 地址分配表:
| 输入信号 | 输出信号 | IO 地址 |
|------|------------|--------|
| 电机正转 | 电机反转 | 10 |
| 电源接通 | 电源断开 | 11 |
| 限位开关 | 复位开关 | 12 |
| 急停开关 | 启动开关 | 13 |
| 温度传感器 | 温度报警器 | 14 |
| 计数器 | 计数清零 | 15 |
在这个表中,10、11、12、13 和 14 号端口是 PLC 的输入端口,用于监测电机正转、电机反转、电源接通、限位开关和急停开关等信号。
15 号端口是 PLC 的输出端口,用于控制电机的正反转。
此外,还需要绘制电动机正反转的 PLC 控制接线图和梯形图,以便在 PLC 内部传输和处理输入和输出信号。
在接线图中,需要将电动机的电源和控制线路与 PLC 的输入和输出端口进行连接。
在梯形图中,需要绘制 PLC 内部的控制逻辑,例如当输入信号满足特定条件时,如何触发输出信号来控制电机的正反转。
电气控制与PLC控制基础理论-第六章

输入
输出
SB1 X1 SB2 X2
红灯L1
Y0
绿灯L2,L3,L4,L5 Y1
黄灯L6,L7,L8,L9 Y2
表6-2 天塔之光控制系统输入/输出端口分配表
天塔之光控制系统设计
2、基于三菱FX2N系列PLC天塔之光控制系统设计 (2)PLC外部接线图设计 PLC外部接线图设计如图6-10所示。
➢ 要考虑电源的输出功率和极性问题。
编制PLC程序并进行模拟调试
编制PLC程序时要注意以下问题: (1)以输出线圈为核心设计梯形图,并画出该线圈的得电条件、失电条件和自锁条件。 (2)如果不能直接使用输入条件逻辑组合成输出线圈的得电和失电条件,则需要使用辅助继电器 建立输出线圈的得电和失电条件。 (3)如果输出线圈的得电和失电条件中需要定时或计数条件时,要注意定时器或计数器得电和失 电条件。 (4)如果输出线圈的得电和失电条件中需要功能指令的执行结果作为条件时,使用功能指令梯级 建立输出线圈的得电和失电条件。 (5)画出各个输出线圈之间的互锁条件。 (6)画保护条件。 根据以上要求绘制好梯形图后,将程序下载到PLC中,通过观察其输出端发光二极管的变化进行模 拟调试,并根据要求进行修改,直到满足系统要求。
图6-16 PLC外部接线图 图6-17 DC24V直流电源接线图
十字交通灯控制系统设计
2、基于三菱FX2N系列PLC十字交通灯控制系统设计 (4)PLC强电电路图 PLC强电电路图如图6-18所示。
图6-18 PLC强电电路图
十字交通灯控制系统设计
2、基于三菱FX2N系列PLC十字交通灯控制系统设计 (5)PLC梯形图设计 PLC梯形图设计如图6-19所示。 (6)指令程序的传输 使用GX Developer(或FXGP/WIN-C)编程软件绘 制图6-19所示的PLC梯形图,并进行转换和PLC程序传 输。也可使用FX-20P型手持式编程器进行程序传输, 方法不再赘述。
任务1.1-用PLC改造三相异步电动机正反转控制线路

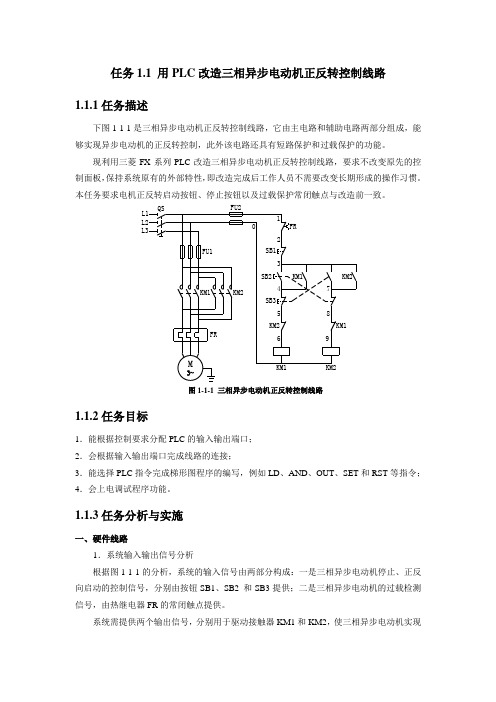
任务1.1 用PLC 改造三相异步电动机正反转控制线路任务描述下图1-1-1是三相异步电动机正反转控制线路,它由主电路和辅助电路两部分组成,能够实现异步电动机的正反转控制,此外该电路还具有短路保护和过载保护的功能。
现利用三菱FX 系列PLC 改造三相异步电动机正反转控制线路,要求不改变原先的控制面板,保持系统原有的外部特性,即改造完成后工作人员不需要改变长期形成的操作习惯。
本任务要求电机正反转启动按钮、停止按钮以与过载保护常闭触点与改造前一致。
图1-1-1三相异步电动机正反转控制线路任务目标1.能根据控制要求分配PLC 的输入输出端口; 2.会根据输入输出端口完成线路的连接;3.能选择PLC 指令完成梯形图程序的编写,例如LD 、AND 、OUT 、SET 和RST 等指令; 4.会上电调试程序功能。
任务分析与实施一、硬件线路1.系统输入输出信号分析根据图1-1-1的分析,系统的输入信号由两部分构成:一是三相异步电动机停止、正反向启动的控制信号,分别由按钮SB1、SB2和SB3提供;二是三相异步电动机的过载检测信号,由热继电器FR 的常闭触点提供。
系统需提供两个输出信号,分别用于驱动接触器KM1和KM2,使三相异步电动机实现M3L1L2L3QSFU1FU2KM1KM2FRKM1KM2KM1KM2SB3SB2SB1KM1KM2FR123456789正反转运行。
根据上述分析,PLC 的I/O 端口分配如表1-1-1所示。
表1-1-1 I/O 端口分配表2.硬件线路的设计硬件线路由主电路和控制回路构成,具体如图1-1-2所示。
图1-1-2三相异步电动机正反转PLC 控制线路说明:(1)为延长PLC 输入点的使用寿命,其输入信号一般采用常开的方式接入,但为更可靠接受保护类信号,其输入信号一般采用常闭的方式接入;(2)与上图中一致,凡是由PLC 实现的正反转控制线路,KM1和KM2必须实行电气联锁,否则在电动机正反转切换的过程中会导致主回路短路;(3)由于三菱FX2N-48MR (继电器输出型)的输出点承受电压最大为AC240V 或DC30V ,故本图中使用的接触器线圈额定电压选为AC220V 。
电气控制与PLC应用第2版习题答案作者张伟林王开仵征王飞课题二练习题参考答案

课题二练习题参考答案任务一PLC基本知识与操作1.答:PLC输入端用来接收外部开关量输入信号。
PLC输入端内部电路采用光电耦合器可以提高PLC的抗干扰能力和安全性能,进行高低电平(24V/5V)转换。
2.答:PLC输出端的作用是控制外部负载,负载串接在外部电源、输出端Y和输出公共端(COM1,COM2……)之间。
输出接口电路有继电器、晶体管和晶闸管三种形式。
继电器输出接口适用于AC250V以下、DC30V以下性质的负载;晶体管输出接口适用于DC 5~30V性质的负载;晶闸管输出接口适用于AC85~242V性质的负载。
3.答:输入、输出继电器中不存在X8、X9、Y8、Y9地址编号,因为它们采用的是八进制编码。
4.答:POWER为电源指示灯;RUN为程序运行指示灯;BATT.V为内部电池电压下降指示灯;PROG.E为程序运行错误指示灯;CPU.E为CPU运行错误指示灯;IN LED为输入指示灯;OUT LED为输出指示灯。
5.解:PLC端口分配表。
输入端口输出端口输入继电器输入元件作用输出继电器输出元件控制对象X10SB点动按钮Y10HL指示灯任务二应用PLC实现电动机自锁控制1.答:AND和ANI都是单个触点串联指令,不同的是AND串联一个常开触点,ANI串联一个常闭触点。
2.答:OR和ORI都是单个触点并联指令,不同的是OR并联一个常开触点,ORI并联一个常闭触点。
3.答:在PLC控制系统中,停止按钮和热继电器要使用其常闭触头的原因是:如果连接停止按钮或热继电器的外部线路因故障原因断开时,程序会自动停止运行,安全性能高。
4.答:在电动机多地控制中,各地启动按钮要并联使用同一个输入端口,各地停止按钮串联后使用另一个输入端口。
5.答:指令表如下:启动触点是X010、X012,停止触点是X011、X013,自锁接点是Y010、Y011,联锁接点是Y010。
任务三应用PLC实现点动与自锁混合控制1.答:相同点:辅助继电器M与输出继电器Y都有线圈和触点。
CameraLink图像采集接口电路1(2)详解
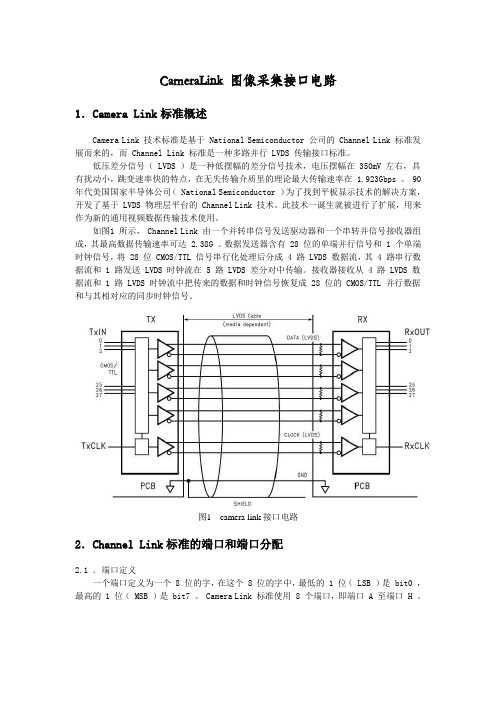
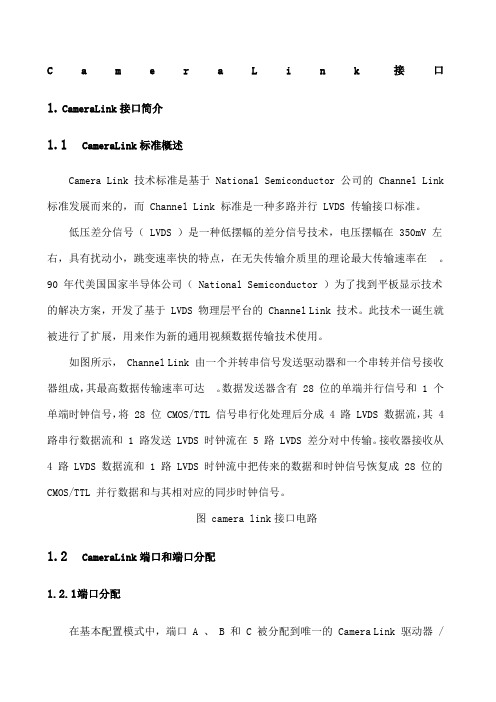
CameraLink 图像采集接口电路1.Camera Link标准概述Camera Link 技术标准是基于 National Semiconductor 公司的 Channel Link 标准发展而来的,而 Channel Link 标准是一种多路并行 LVDS 传输接口标准。
低压差分信号( LVDS )是一种低摆幅的差分信号技术,电压摆幅在 350mV 左右,具有扰动小,跳变速率快的特点,在无失传输介质里的理论最大传输速率在 1.923Gbps 。
90 年代美国国家半导体公司( National Semiconductor )为了找到平板显示技术的解决方案,开发了基于 LVDS 物理层平台的 Channel Link 技术。
此技术一诞生就被进行了扩展,用来作为新的通用视频数据传输技术使用。
如图1 所示, Channel Link 由一个并转串信号发送驱动器和一个串转并信号接收器组成,其最高数据传输速率可达 2.38G 。
数据发送器含有 28 位的单端并行信号和 1 个单端时钟信号,将 28 位 CMOS/TTL 信号串行化处理后分成 4 路 LVDS 数据流,其 4 路串行数据流和 1 路发送 LVDS 时钟流在 5 路 LVDS 差分对中传输。
接收器接收从 4 路 LVDS 数据流和 1 路 LVDS 时钟流中把传来的数据和时钟信号恢复成 28 位的 CMOS/TTL 并行数据和与其相对应的同步时钟信号。
图1 camera link接口电路2.Channel Link标准的端口和端口分配2.1 .端口定义一个端口定义为一个 8 位的字,在这个 8 位的字中,最低的 1 位( LSB )是 bit0 ,最高的 1 位( MSB )是 bit7 。
Camera Link 标准使用 8 个端口,即端口 A 至端口 H 。
2.2 .端口分配在基本配置模式中,端口 A 、 B 和 C 被分配到唯一的 Camera Link 驱动器 / 接收器对上;在中级配置模式中,端口 D 、 E 和 F 被分配到第二个驱动器 / 接收器对上;在完整配置模式中,端口 A 、 B 和 C 被分配到第一个驱动器 / 接收器对上,端口 D 、 E 和 F 被分配到第二个驱动器 / 接收器对上,端口 G 和 H 被分配到第三个驱动器 / 接收器对上(见图2 )。
任务1.1-用PLC改造三相异步电动机正反转控制线路
任务1.1 用PLC 改造三相异步电动机正反转控制线路1.1.1任务描述下图1-1-1是三相异步电动机正反转控制线路,它由主电路和辅助电路两部分组成,能够实现异步电动机的正反转控制,此外该电路还具有短路保护和过载保护的功能。
现利用三菱FX 系列PLC 改造三相异步电动机正反转控制线路,要求不改变原先的控制面板,保持系统原有的外部特性,即改造完成后工作人员不需要改变长期形成的操作习惯。
本任务要求电机正反转启动按钮、停止按钮以及过载保护常闭触点与改造前一致。
图1-1-1 三相异步电动机正反转控制线路1.1.2任务目标1.能根据控制要求分配PLC 的输入输出端口; 2.会根据输入输出端口完成线路的连接;3.能选择PLC 指令完成梯形图程序的编写,例如LD 、AND 、OUT 、SET 和RST 等指令; 4.会上电调试程序功能。
1.1.3任务分析与实施一、硬件线路1.系统输入输出信号分析根据图1-1-1的分析,系统的输入信号由两部分构成:一是三相异步电动机停止、正反向启动的控制信号,分别由按钮SB1、SB2 和SB3提供;二是三相异步电动机的过载检测信号,由热继电器FR 的常闭触点提供。
系统需提供两个输出信号,分别用于驱动接触器KM1和KM2,使三相异步电动机实现M3L1L2L3QSFU1FU2KM1KM2FRKM1KM2KM1KM2SB3SB2SB1KM1KM2FR123456789正反转运行。
根据上述分析,PLC 的I/O 端口分配如表1-1-1所示。
表1-1-1 I/O 端口分配表2.硬件线路的设计硬件线路由主电路和控制回路构成,具体如图1-1-2所示。
图1-1-2 三相异步电动机正反转PLC 控制线路说明:(1)为延长PLC 输入点的使用寿命,其输入信号一般采用常开的方式接入,但为更可靠接受保护类信号,其输入信号一般采用常闭的方式接入;(2)与上图中一致,凡是由PLC 实现的正反转控制线路,KM1和KM2必须实行电气联锁,否则在电动机正反转切换的过程中会导致主回路短路;(3)由于三菱FX2N-48MR (继电器输出型)的输出点承受电压最大为AC240V 或DC30V ,故本图中使用的接触器线圈额定电压选为AC220V 。
2.2 常用ABB标准IO板的说明

CAN信号线low BLUE
8
屏蔽线
9
CAN信号线high WHITE
10
24V
11
GND地址选择公 共端
12
作用 模块ID bit0 模块ID bit1 模块ID bit2 模块ID bit3 模块ID bit4 模块ID bit5
• 在X5接线端中,第6 —1 2口是DSQC651的节点地址设置位,是专门用来 设置 DSQC651 接口板在整个工作站 DeviceNet 现场总线网络 中的节 点地址(图 5),只要把专门插 6~12 口插头中的相应插片剪去,就可 设置 DSQC651 在整个DeviceNet现场总线网络中的节点地址。
使用定义 地址分配
数字输出 1A 数字输出 1B
0
数字输出 2A 数字输出 2B
1
数字输出 3A 数字输出 3B
2
数字输出 4A 数字输出 4B
3
接线端编号 9 10 11 12 13 14 15 16
使用定义 地址分配
数字输出 5A 数字输出 5B
4
数字输出 6A 数字输出 6B
5
数字输出 7A 数字输出 7B
数字输入 7 6
3
数字输入 3 2
8
数字输入 8 7
4
数字输入 4 3
9
0V
5
数字输入 5 4
10-16
未使用
F 数字输入信号指示灯。
2.2.4 ABB标准I/O板DSQC355A
• DSQC355A主要提供四个模拟输入信号和四个模拟输出信号的处理。
DSQC335A I/O接口板
A X8模拟输入端口,详见表2-10。
20
模拟输出_2 ,0V
可编程控制(PLC)电梯的程序以及梯形图、详细解释

可编程控制(PLC)电梯的程序以及梯形图、详细解释PLC的工作原理是通过输入模块将外部信号转换为数字信号,经过CPU处理后输出至输出模块,控制外部设备的运行。
CPU是PLC的核心部件,负责接收输入信号、处理逻辑运算、控制输出信号等。
PLC还具有存储程序和数据的内存模块,以及供电模块等。
4、电梯控制构成电梯控制系统由电气控制部分和机械部分组成。
电气控制部分包括PLC控制器、输入输出模块、按钮、指示灯等,机械部分包括电机、减速器、曳引轮、钢丝绳等。
电梯控制系统通过PLC控制器控制电机的运行,从而实现电梯的上下运动。
5、输入输出(I/O)端口功能分配表输入输出端口功能分配表是指将输入输出端口与具体的功能进行对应,以便于程序的编写和调试。
在本实验中,输入端口包括楼层请求信号和开关门信号,输出端口包括电机运行信号和指示灯信号。
6、程序执行流程图程序执行流程图是指将程序的执行过程以图形化的形式展示出来,便于程序员进行编写和调试。
在本实验中,程序执行流程图包括电梯上行程序和电梯下行程序,分别对应电梯向上和向下运动的控制。
7、梯形图梯形图是PLC程序编写中常用的图形化编程方法,以梯形图的形式展示程序的执行逻辑。
在本实验中,梯形图包括定时器T0、一楼的控制、二楼的控制、三楼的控制、四楼的控制、确定电梯楼层位置、电梯趋势确定等部分。
8、指令表指令表是指PLC程序编写中常用的指令及其功能的对照表,便于程序员进行编写和调试。
在本实验中,指令表包括常用的输入输出指令、比较指令、逻辑指令、数学指令等。
五、问题与解决方案在实验过程中可能会遇到各种问题,如PLC控制器无法正常运行、输入输出信号异常等。
针对这些问题,可以通过检查电路连接、更换设备、重新编写程序等方法进行解决。
六、实验总结与心得体会通过本次实验,我深入了解了PLC的基本原理和应用,掌握了电梯控制系统的设计方法和实现过程。
同时,也发现了实验中存在的问题和不足之处,为今后的研究和工作提供了宝贵的经验。
314IO表及伺服参数
X12
伺服零速箝位
Y7Байду номын сангаас
A 点传感器 SQ2
X13
内部速度 1
Y14
B 点传感器 SQ3
X14
内部速度 2
Y15
正转点动
Y10
反转点动
Y11
左限位信号输出 Y12
右限位信号输出
考Y13
伺服速度反馈
VIN1
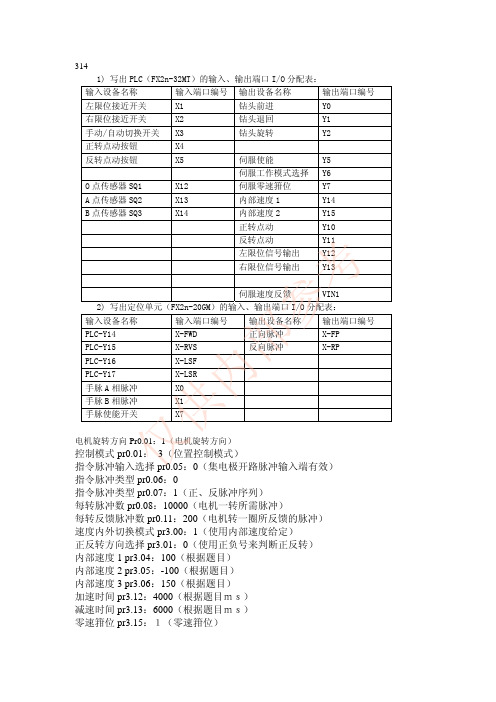
参 2) 写出定位单元(FX2n-20GM)的输入、输出端口 I/O 分配表:
输入设备名称
输入端口编号 输出设备名称 输出端口编号
PLC-Y14 PLC-Y15 PLC-Y16 PLC-Y17 手脉 A 相脉冲 手脉 B 相脉冲 手脉使能开关
X-FWD X-RVS X-LSF
部正向脉冲
反向脉冲
X-FP X-RP
X-LSR X0
内
供 X1
X7
仅 电机旋转方向 Pr0.01:1(电机旋转方向)
控制模式 pr0.01: 3(位置控制模式) 指令脉冲输入选择 pr0.05:0(集电极开路脉冲输入端有效) 指令脉冲类型 pr0.06:0 指令脉冲类型 pr0.07:1(正、反脉冲序列) 每转脉冲数 pr0.08:10000(电机一转所需脉冲) 每转反馈脉冲数 pr0.11:200(电机转一圈所反馈的脉冲) 速度内外切换模式 pr3.00:1(使用内部速度给定) 正反转方向选择 pr3.01:0(使用正负号来判断正反转) 内部速度 1 pr3.04:100(根据题目) 内部速度 2 pr3.05:-100(根据题目) 内部速度 3 pr3.06:150(根据题目) 加速时间 pr3.12:4000(根据题目ms) 减速时间 pr3.13:6000(根据题目ms) 零速箝位 pr3.15:1(零速箝位)
05_端口输入输出讲解

A.读:开“读锁存器门”,得到P0寄存器(8个锁存器)状态。 B.修改:讲A累加器内容和 刚得到的P0寄存器内容按位与。 C.写:将“与”计算结果送到内部总线,给出“写锁存器脉 冲”,运算结果将保存在P0寄存器中。
定型:
P0,P2-P7端口I/O 单元功能框图(不包括P1端口) (A型驱动)
P1端口I/O 单元功能入/输出
C8051F120 有8 个并口—— 64 个数字I/O 引脚,这64个 引脚既可以用作数字输入,也可以用作数字输出(在同一时 刻输入/输出二选一)。 如何输入/输出?通过端口寄存器(SFR) P0-P7 P0:80 P1:90 P2:A0 P3:B0 P4:C8 P5:D8 P6:E8 P7:F8 端口(P0-P7)既可以按位寻址也可以按字节寻址。 低端口:P0、P1、P2 和P3 高端口:P4、P5、P6 和P7 3.1 输出驱动电路 & 输入电路
我们运行的读引脚指令开了“读引脚门”,SFR的某个位 开了“数字门”,因此引脚状态进入内部总线,并被CPU读 取。
④.
由于没有写锁存器脉冲,因此锁存器(端口寄存器的某个位)
输入时为什么端口寄存器和引脚状态之 间有对应关系?对应关系是什么?
对应于“读引脚”指令,还有一类指令叫“读-修改-写” 指令,例如ANL P0,A 运行效果如下:
图3-3 优先权交叉开关译码表
3.1.1 交叉开关引脚分配 当交叉开关配置寄存器XBR0、XBR1 和XBR2 中外设的对 应使能位被设置为逻辑‘1’时,交叉开关将端口引脚分配给 外设,详情如下。
工作原理:
交叉开关按优先级顺序将端口0 – 3 的引脚分配给器件上的 数字外设(UART、SMBus、PCA、定时器等)。端口引 脚的分配顺序是从P0.0 开始,可以一直分配到P3.7(P00优 先级最高,P37优先级最低)。 为数字外设分配端口引脚的优先级(见下页)顺序列于图3.3, UART0 具有最高优先权,而CNVSTR 具有最低优先权。
全国技能大赛任务书plc实操样题

2013年全国职业院校现代制造及自动化技术教师大赛“可编程序控制系统设计及应用”实操比赛【样题】(总时间:240分钟)任务书场次:工位号:一、竞赛要求1.正确使用工具,操作安全规范;2.部件安装、电路连接、接头处理正确、可靠,符合要求;3.爱惜赛场的设备和器材,尽量减少耗材的浪费;4.保持工作台及附近区域干净整洁;5.竞赛过程中如有异议,可向现场考评人员反映,不得扰乱赛场秩序;6.遵守赛场纪律,尊重考评人员,服从安排。
二、注意事项1.参赛选手在比赛过程中应该遵守相关的规章制度和安全守则,如有违反,则按照相关规定在考试的总成绩中扣除相应分值;2.参赛选手的比赛任务书用参赛证号、场次、工位号标识,不得写有姓名或与身份有关的信息,否则成绩无效,在比赛任务书的指定附页内完成电气控制原理图的设计,比赛任务书完成后收回;3.参赛选手应将编写的程序资料保存在“工位号”文件夹下;4.由于错误接线等原因引起PLC、步进电机及驱动器、变频器、触摸屏和直流电源损坏,取消竞赛资格;5.参赛选手应在240分钟内完成任务书规定的内容;考试成绩以100分进行计算。
一、设备组成及工作情况描述××综合传送设备是为某生产线传送设备其中二个环节的机电一体化设备,在该设备上可完成两个传送任务,一个是变频传送,另一个是五自由度机械手搬运,设备可通过外部按钮及触摸屏进行操作。
××综合传送设备部件的名称和位置如下图(图1)所示:图1二、需要完成的工作任务请你按要求,在4h(四小时)内,完成××综合传送设备线路连接和调试。
任务一:电路设计(1)请你仔细阅读变频传送单元的控制要求和参数设置说明,然后根据你对设备及其工作过程的理解,在提供指定的绘制专用页图框内绘制变频传送单元电气控制原理图,包括PLC的I/O端子分配、变频器主电路和控制电路,并在绘制专用页密封线上选手编号、场次号及工位号。
CameraLink接口时序控制
C a m e r a L i n k接口1.CameraLink接口简介1.1CameraLink标准概述Camera Link 技术标准是基于 National Semiconductor 公司的 Channel Link 标准发展而来的,而 Channel Link 标准是一种多路并行 LVDS 传输接口标准。
低压差分信号( LVDS )是一种低摆幅的差分信号技术,电压摆幅在 350mV 左右,具有扰动小,跳变速率快的特点,在无失传输介质里的理论最大传输速率在。
90 年代美国国家半导体公司( National Semiconductor )为了找到平板显示技术的解决方案,开发了基于 LVDS 物理层平台的 Channel Link 技术。
此技术一诞生就被进行了扩展,用来作为新的通用视频数据传输技术使用。
如图所示, Channel Link 由一个并转串信号发送驱动器和一个串转并信号接收器组成,其最高数据传输速率可达。
数据发送器含有 28 位的单端并行信号和 1 个单端时钟信号,将 28 位 CMOS/TTL 信号串行化处理后分成 4 路 LVDS 数据流,其 4 路串行数据流和 1 路发送 LVDS 时钟流在 5 路 LVDS 差分对中传输。
接收器接收从4 路 LVDS 数据流和 1 路 LVDS 时钟流中把传来的数据和时钟信号恢复成 28 位的CMOS/TTL 并行数据和与其相对应的同步时钟信号。
图 camera link接口电路1.2CameraLink端口和端口分配1.2.1端口分配在基本配置模式中,端口 A 、 B 和 C 被分配到唯一的 Camera Link 驱动器 /接收器对上;在中级配置模式中,端口 D 、 E 和 F 被分配到第二个驱动器 / 接收器对上;在完整配置模式中,端口 A 、 B 和 C 被分配到第一个驱动器 / 接收器对上,端口 D 、 E 和 F 被分配到第二个驱动器 / 接收器对上,端口 G 和 H 被分配到第三个驱动器 / 接收器对上。
基于PLC六层电梯控制系统的设计

基于PLC六层电梯控制系统的设计Six—layer Elevator Control System Basedon PLC学院:专业班级:学生姓名:学号:指导教师:目录1 绪论 (1)1.1 电梯的发展 (1)1.2 课题的主要内容 (1)1.3 电梯的控制要求 (1)2 电梯控制系统的硬件设计 (2)2。
1 电梯控制系统主电路和控制电路设计 (3)2。
2 I/O端口设计和PLC的选型 (4)2.3 旋转编码器的选型 (8)2。
4 变频器的选型 (8)3 电梯控制系统的软件设计 (9)3。
1 电梯的工作流程图 (9)3.2 梯形图 (10)4 电梯的模拟调试 (27)结论 (32)致谢............................................................................................ 错误!未定义书签。
参考文献. (34)1 绪论1.1 电梯的发展现代电梯的发展要从1889年美国奥梯斯公司以电动机作为动力而设计制造出了一个实实在在的升降电梯开始。
其中第一台自动扶梯出现在1900年。
而到了1949年,群控电梯开始出现并得到应用。
到了1955年出现了开始出现了小型计算机(真空管)控制电梯.1967年可控硅应用于电梯,使电梯的性能得到很大的提高,使得电梯的拖动系统得到很大的简化。
从1976年开始微处理机开始用于电梯的控制,使电梯的电气控制更加方便更加能满足人们不断变化的需求.电梯从此进入了一个新的发展时期。
由于早期的电梯在进行电气控制时存在故障率较高、可靠性差、接线复杂、以及程序不易更改等缺点,这就要求我们能够开发出一款安全、高效的控制系统。
由于可编程控制器(PLC)不但操作简单且易懂,并且可靠性高、控制精度高、控制程序也易于改变,在维修和保养方面也比较方便。
1。
2 课题的主要内容PLC以其性能的优势在电梯业得到广泛运用。
电气控制与PLC应用 第3章 PLC基本指令的应用
1.点动控制线路 电动机的点动控制要求是:按下按钮SB,电动机运转;松开按 钮SB,电动机停机。
图3.16 点动控制线路PLC接线图和程序梯形图
2.运行三菱PLC编程软件SWOPC-FXGP/WIN-C
图3.17 初始启动画面
图3.18 选 择PLC的类 型
图3.19 程序编辑的主界面
图3.20 指令输入对话框
3.将PLC中存储的原用户程序清除
(1)按【RD/WR】键两次。 (2)按【NOP/0】键。 (3)按【MC/A】键。 (4)按【GO】键。手持编程器屏幕上显示如下: ALL CLEAR ? OK → [GO] …清除所有程序吗? …是→按【GO】键 …否→按【CLEAR】键
NO → [CLEAR]
3.4 脉冲指令与正反转控制程序 3.4.1 脉冲上升沿、下降沿“取”指令LDP、LDF
W 0 LD 2 END X 006 …取X6状态 …输出到Y0 …程序结束 1 OUT Y 000
3 NOP
…空指令
5.运行程序
将方式开关【RUN/STOP】开关拨向【RUN】位置,PLC置于程序 运行状态,程序运行指令灯(RUN)亮。
6.操作
(1)按下按钮SB,PLC输入/输出LED指示灯X6/Y0亮,灯HL通电亮。 (2)松开按钮SB,PLC输入/输出LED指示灯X6/Y0灭,灯HL断电灭。 运行的结果符合控制要求。 从这个控制例子可以看出,一个完整的PLC控制系统是由硬件和 软件(用户程序)两部分组成。输入不同的用户程序,PLC便具有不同的 控制功能。
2.FX2N系列基本单元I/O端子的排列
图3.8 FX2N-16MR 的I/O端子排列
图3.9 FX2N-32MR 的I/O端子排列
啤酒自动灌装生产流水线
·本科毕业设计(论文)题目啤酒自动灌装生产流水线控制系统的设计学生姓名崔译丹学号201433070001教学院系电气信息学院专业年级电气工程及其自动化2014级(双)指导教师方玮职称讲师单位西南石油大学辅导教师职称单位完成日期2016年05月19日Southwest Petroleum University Graduation ThesisThe Design of Automatic Beer Filling Production LineControl SystemGrade:2014Name:Cui yidanSpeciality:Electrical Engineering and AutomationInstructor:Fang weiSchool of Electrical Engineering and Information2016-5摘要本文主要介绍的是基于三菱FX2N-64MR PLC的啤酒自动灌装生产流水线的设计。
该系统的设计包括硬件设计和软件设计,其中硬件设计包括三菱FX2N-64MR PLC 外部电路的设计;软件部分包括程序的设计与调试。
在本设计中,包括自动控制和手动控制,选择适当的清洗机,灌装机,封盖机,包装机以及光电传感器实现了清洗、灌装、封盖、包装、检测等功能。
形成快速一体的自动灌装系统。
本设计中使用了计数器分别对合格品与不合格品进行检测,并设置了红灯绿灯便于操作者观察,另外,为了保证系统在出现意外故障时,能够得到很好的解决,系统还配置了急停开关等。
对于检查出的不合格产品采用推出装置将其移走。
并运用组态王软件实现了对整个自动灌装系统的实时监控,可以更好的了解和调整生产工艺及控制程序。
关键词:啤酒灌装;三菱FX2N-64MR PLC;组态王;AbstractThis article introduce The design of automatic beer filling production line control system that based on Mitsubishi FX2N-64MR PLC(Programmable Logic Controller Programmable Logic Controller). In my design, it include two parts about hardware and software. The hardware parts include the design of the external circuit of Mitsubishi FX2N-64MR PLC. The software part includes the design and debugging of the program.In this design, including automatic control and the manual control, I select the appropriate cleaning machine, filling machine, capping machine, packaging machine and photoelectric sensor realized washing, filling, sealing, packaging, testing and other functions. They form an automatic filling system with rapid integration. This design using the counter respectively for qualified products and unqualified products were detected, and set up a red light green light is convenient for the operator to observe. In addition, in order to ensure the system in the unexpected failure, can get very good solution, the system is also equipped with emergency stop switch. To check out the unqualified products using the launch device to move away. And the use of configuration software to realize the real-time monitoring of the automatic filling system, can better understand and modify the production process and control program.Keywords:Beer Filling;Mitsubishi FX2N-64MR PLC;Kingview目录1 绪论 (1)1.1 设计目的与意义 (1)1. 2 国内发展趋势 (1)1. 3本设计的主要任务 (1)2 总体设计方案 (3)2.1 啤酒灌装生产流水线的基本结构 (3)2.2 啤酒灌装生产流水线的工作原理 (4)3 系统硬件设计 (5)3.1 选择电气元件 (5)3.1.1 电动机的选择 (5)3.1.2清洗灌装封盖打包设备的选择 (5)3.1.3传感器的选择 (7)3.1.4 热继电器的选择 (8)3.1.5 接触器的选择 (9)3.1.6 低压断路器和熔断器的选择 (9)3.1.7 信号电器的选择 ........................................................................................... (9)3.2 选择PLC ................................................................................................................ ..103.2.1 PLC的I/O分配表 ....................................................................................... ..113.2.2 PLC端口接线图........................................................................................... ..123.3主电路的设计 ........................................................................................................ ..124 系统程序的设计 (14)4.1系统流程图 (14)4.2 梯形图 (14)4.2.1 手动灌装流水线程序 (16)4.2.2 自动灌装流水线程序 (20)西南石油大学本科毕业设计(论文)5 系统组态设计 (25)5.1制作过程 (25)5.1.1 创建新工程 (25)5.1.2 构建数据词典 (26)5.1.3 组态画面和动画连接 (27)5.2组态设计运行和调试 (29)6 总结 (33)谢辞 (34)参考文献 (35)附录A 主电路接线图 (36)附录B PLC外部电路接线图 (37)附录C 梯形图 (38)啤酒自动灌装生产流水线控制系统的设计1 绪论1.1设计目的与意义传统的啤酒灌装生产线的电气设备控制系统是传统的继电器——接触器控制方式,在使用的过程中,生产工效低,人机对话靠指示灯+按钮+讯响器的工作方式,响应慢,故障率高,可靠性差,系统的工作状态、故障处理、设备监控与维护只能凭经验被动的去查找故障点。
PLC和NC的关系

一、PLC和NC的关系PLC用于通用设备的自动控制,称为可编程控制器。
PLC用于数控机床的外围辅助电气的控制,称为可编程序机床控制器。
因此,在很多数控系统中将其称之为PMC。
数控系统有两大部分,一是NC、二是PLC,这两者在数控机床所起的作用范围是不相同的。
可以这样来划分NC和PLC的作用范围:1、实现刀具相对于工件各坐标轴几何运动规律的数字控制。
这个任务是由NC来完成;2、机床辅助设备的控制是由PLC来完成。
它是在数控机床运行过程中,根据CNC内部标志以及机床的各控制开关、检测元件、运行部件的状态,按照程序设定的控制逻辑对诸如刀库运动、换刀机构、冷却液等的运行进行控制。
在数控机床中这两种控制任务,是密不可分的,它们按照上面的原则进行了分工,同时也按照一定的方式进行连接。
NC和PLC的接口方式遵循国际标准“ISSO 4336-1981(E)机床数字控制-数控装置和数控机床电气设备之间的接口规范”的规定,接口分为四种类型:1、与驱动命令有关的连接电路;2、数控装置与测量系统和测量传感器间的连接电路;3、电源及保护电路;4、通断信号及代码信号连接电路;从接口分类的标准来看,第一类、第二类连接电路传送的是数控装置与伺服单元、伺服电机、位置检测以及数据检测装置之间控制信息。
第三类是由数控机床强电电路中的电源控制控制电路构成。
通常由电源变压器、控制变压器、各种断路器、保护开关、继电器、接触器等等构成。
为其他电机、电磁阀、电磁铁等执行元件供电。
这些相对于数控系统来讲,属于强电回路。
这些强电回路是不能够和控制系统的弱电回路,直接相连接的,只能够通过中间继电器等电子元器件转换成直流低压下工作的开关信号,才能够成为PLC或继电器逻辑控制电路的可接受的电信号。
反之,PLC或继电器逻辑控制来的控制信号,也必须经过中间继电器或转换电路变成能连接到强电线路的信号,再由强电回路驱动执行元件工作。
第四类信号是数控装置向外部传送的输入输出控制信号。
YL-335B实训教材单站篇
放置预留与之相配的螺母,因此在对该部分的铝合金型材进行连接时,如果相应位置没有
放置足够的螺母,将造成无法安装或安装不可靠。
表 3-1-1 各种组件的装配过程
组件名称及外观
组件装配过程
料 仓 底 座 及 出 料 台
推 料 机 构 组 件
铝 合 金 型 材 支 撑 架 组 件
5
2、各组件装配好后,用螺栓把它们连接为总体,再用橡皮锤把装料管敲入料仓底座。 然后将连接好供料站机械部分以及电磁阀组和接线端口固定在底板上,最后把机械机构固 定在底板上完成供料站的安装,过程见图 3-1-5。
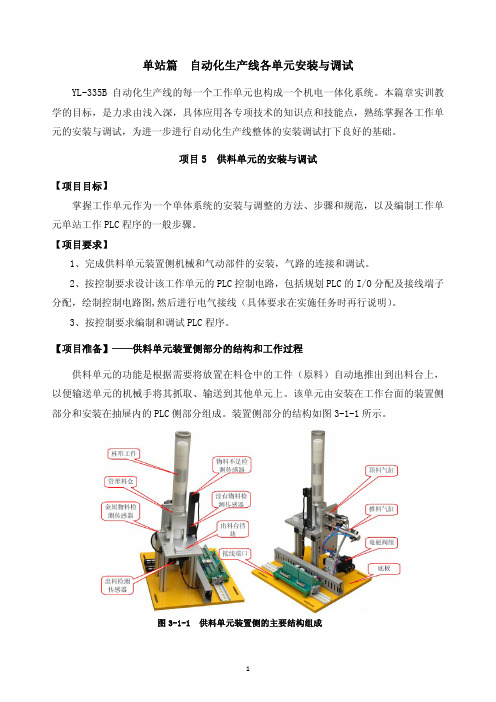
单站篇 自动化生产线各单元安装与调试
YL-335B 自动化生产线的每一个工作单元也构成一个机电一体化系统。本篇章实训教 学的目标,是力求由浅入深,具体应用各专项技术的知识点和技能点,熟练掌握各工作单 元的安装与调试,为进一步进行自动化生产线整体的安装调试打下良好的基础。
项目 5 供料单元的安装与调试 【项目目标】
图 3-1-5 供料机械和气动部件的总装
注意:机械机构固定在底板上的时候,需要将底板移动到工作台的边缘,螺栓从底板 的反面拧入,将底板和机械机构部分的支撑型材连接起来。
3、机械部件装配完成后,装上欠缺料检测、金属检测和出料台物料检测等传感器。安 装时请注意它们的安装位置、方向等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
SQ5-1
主轴箱松开行程开关
I2.6
SQ5-2
主轴箱夹紧行程开关
I2.7
SB10
主轴箱右移
I1.4
SQ4-2
主轴箱右行程开关
输出信号端口分配表
地址号
符号名称
用途
Q0.0
KM1
主轴旋转接触器
Q0.1
KM2
摇臂上升接触器
Q0.2
KM3
摇臂下降接触器
Q0.3
KM4
液压泵正转
Q0.4
KM5
液压泵反转
输入信号端口分配表
地址号
符号名称
用途
I0.0
SB1
主电机停止按钮
I0.1
SB2
主电机启动按钮
I0.2
SB3
摇臂上升启动按钮
I0.3
SB4
摇臂下降启动按钮
I0.4
SB5
主轴箱、立柱、摇臂松开按钮
I0.5
SB6
主轴箱、立柱、摇臂夹紧按钮
I0.6
SQ1-1
摇臂上升行程开关
I0.7
SQ1-2
摇臂下降行程开关
I1.0
SQ2-1
摇臂放松行程开关
I1.1
SQ2-2
摇臂夹紧行程开关
I1.3
FR1
主轴电机过载保护热继电器
I1.5
SA
系统总开关
I1.7
SB7
主轴顺时针转动
I2.0
SQ3-1
主轴松开行程开关
I2.1
SQ3-2
主轴夹紧行程开关
I2.2
SB8
主轴逆时针转动I2.3SB9Fra bibliotek主轴箱左移
I2.4
SQ4-1
主轴箱左移行程开关
Q0.5
YA1
摇臂电磁阀
Q0.6
EL
电源工作指示灯
Q0.7
HL1
摇臂松开指示灯
Q1.0
HL2
摇臂夹紧指示灯
Q1.1
HL3
主轴电机旋转指示灯
Q1.2
KM6
立柱顺时针转接触器
Q1.3
YA2
立柱电磁阀
Q1.4
HL4
立柱松开指示灯
Q1.5
HL5
立柱夹紧指示灯
Q1.6
KM7
立柱逆时针转接触器
Q1.7
KM8
主轴箱左行接触器
Q2.0
YA3
主轴箱电磁阀
Q2.1
KM9
主轴箱右移接触器
Q2.2
HL6
主轴箱松开指示灯
Q2.3
HL7
主轴箱夹紧指示灯