基于BTS7960B车门控制模块的电动车窗的设计
电动车窗的设计

汽车电动车窗与电动门锁系统设计第一节汽车电动车窗的组成与类型所谓电动车窗,一般是指其玻璃升降器能自动升、降门窗玻璃,即使在行车过程中也能方便地开、关门窗。
所以电动车窗又叫自动车窗,过去仅装在高级轿车上,而在现代轿车上己被普遍采用。
典型电动门锁电路如图2所示。
电路中有4个电路门锁执行器(控制电机)、两个继电器、左右车门的开锁和上锁开关、电控单元以及熔断器等。
电动门锁执行器一般采用直流电机或电磁铁,门锁控制器根据不同的开关信号,实现对4个门锁电机的控制。
开锁与上锁的动作是靠门锁控制器改变门锁直流电机线圈通电方向实现的。
当上锁按钮开关被按下时,电压信号送到控制器中,通过上锁继电器触点的动作使门锁电机完成锁门动作。
当开锁按钮开关被按下时,电压信号送到控制器中,通过开锁继电器触点的动作使门锁电机完全开锁动作。
遥控门锁现在,在国外大约有三分之一车辆已经将遥控门锁(RKE-Remote Keyless Entry)作为标准配置。
遥控门锁即是在电动门锁的基础上增加遥控装置(遥控器),取代传统的车钥匙,并在车内安装有接收模块,以实现上锁、开锁的远距离控制和行车自动锁门控制。
遥控门锁不使用钥匙就能操纵门锁,避免了在黑暗处寻找锁眼,远距离操控缩短了驾驶员在车外的时间,尤其是在雨雪天气时尤为重要;此外,行车自动锁门控制减少了由于行车时忘记锁门带来的事故。
如图3所示典刑遥控门锁电路包括:遥控ECU、门锁ECU、上锁和开锁开关、门锁执行器(电机)以及门锁状态指示器。
遥控门锁电路中,遥控器是实现遥控动作的核心器件。
遥控器是一手持式无线电发射器,遥控操作时,遥控器将上锁和开锁等信号以微弱电波(法规规定的频率小于322M赫兹、电场强度小于500μV/dB、发射距离在3m以内无需作业许可的电波)的形式发送到汽车门锁电控单元的遥控接收模块(遥控ECU),车内接收模块识别发射代码并驱动门锁执行器。
行李箱的上锁和开锁也可用遥控器实现。
每一辆车的发射器都有各自的密码,密码存储在相关的集成电路模块中,车内接收模块在收到发射代码后,首先要识别密码是否正确,然后才能确定是否驱动执行器动作。
单片机在汽车电动车窗控制器中的应用设计

单片机在汽车电动车窗控制器中的应用设计一、引言随着汽车产业的发展和人们对生活质量的要求提高,汽车窗户电动升降器逐渐成为汽车的必备配件。
而电动车窗控制器作为电动车窗的核心控制装置,起着控制车窗升降、防夹人、防掉落等功能。
单片机是一种集成度高、可编程性强的微电子器件,它拥有控制电机、检测传感器、人机交互等丰富的功能。
为了满足汽车电动车窗控制器的要求,本文将基于单片机设计汽车电动车窗控制器。
二、设计原理汽车电动车窗控制器主要由单片机、电机驱动模块、传感器、人机交互模块等组成。
其中,单片机作为控制核心,接收传感器的反馈信号,控制电机驱动模块实现车窗的升降。
同时,单片机还可以通过人机交互模块提供人机界面。
三、硬件设计1.单片机选型:根据汽车电动车窗控制器的要求,选择适合的单片机。
常见的单片机选型有STM32系列、PIC系列等,可以根据具体需求进行选择。
2.电机驱动模块设计:电机驱动模块通常由电机驱动芯片、电机功率放大器等组成。
通过单片机控制电机驱动芯片的输入信号,控制电机的升降。
3.传感器设计:传感器主要用于检测车窗的位置、防夹人等功能。
常见的传感器有光电传感器、霍尔传感器等。
通过单片机读取传感器的反馈信号,实时监测车窗的状态。
4.人机交互模块设计:人机交互模块可以通过触摸屏、按键等方式与单片机进行交互。
通过单片机控制人机交互模块,实现车窗的开关、升降等操作。
四、软件设计1.主程序设计:主程序负责整个电动车窗控制器的工作流程。
主程序通过单片机的GPIO口控制电机驱动模块,实现车窗的升降。
同时,主程序还需要实时读取传感器的反馈信号,判断车窗的状态。
2.人机交互程序设计:人机交互程序负责与人机交互模块通信,并根据人机交互模块的输入信号控制单片机的输出信号。
人机交互程序可以实现车窗的开关、升降等操作。
3.保护程序设计:保护程序用于监测车窗的异常情况,并采取相应的保护措施。
例如,当车窗升降过程中有阻力或者车窗被阻挡时,保护程序可以立即停止电机的运转,以避免危险事故的发生。
BTS7960B

High Current PN Half Bridge NovalithICTM
BTS 7960B BTS 7960P
Product Summary
The BTS 7960 is a fully integrated high current half
bridge for motor drive applications. It is part of the
9 Revision History . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .25
Data Sheet
1
Rev. 1.1, 2004-12-07
3 Maximum Ratings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6
4 Block Description and Characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .7 4.1 Supply Characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .7 4.2 Power Stages . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .8 4.2.1 Power Stages - Static Characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9 4.2.2 Switching Times . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10 4.2.3 Power Stages - Dynamic Characteristics . . . . . . . . . . . . . . . . . . . . . . . . 11 4.3 Protection Functions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .13 4.3.1 Overvoltage Lock Out . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13 4.3.2 Undervoltage Shut Down . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13 4.3.3 Overtemperature Protection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13 4.3.4 Current Limitation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13 4.3.5 Short Circuit Protection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15 4.3.6 Electrical Characteristics - Protection Functions . . . . . . . . . . . . . . . . . . . 16 4.4 Control and Diagnostics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .17 4.4.1 Input Circuit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17 4.4.2 Dead Time Generation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17 4.4.3 Adjustable Slew Rate . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17 4.4.4 Status Flag Diagnosis With Current Sense Capability . . . . . . . . . . . . . . 17 4.4.5 Truth Table . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19 4.4.6 Electrical Characteristics - Control and Diagnostics . . . . . . . . . . . . . . . . 2t.
BTS7960B电机驱动使用说明

电机驱动板实物图如下如图所示:J1接电池;J5接电机;J6(黄色接头)提供5V电源;J6(白色接头)分别是1脚PWM口;2、3脚是控制方向和刹车单片机I/O口给01,是电机正转,10是电机反转,11是刹车。
注意:PWM是反逻辑,因为在单片机与电机驱动间加了反向驱动隔离,保护单片机。
所以占空比越小,方向后是越大,速度越快。
注意:PWM频率最大25KHZ,用在智能车上1KHZ就足够了。
I N H 3I N2I S 6V S 7O U T4G N D 1S R5J 3B T S 7960I N H3I N 2I S6V S 7O U T4G N D1S R5J 4B T S 7960R 31K R 4100R 71K R 8100R 101KR 61K 7.2V 7.2VO U T 2O U T 1R 5 1K R 91K C 5100u F C 7100u F C 6104C 810412J 5M O T O RO U T 1O U T 212J 1P O W E RC 40.1u FC 20.1u FC 3100u F /16V C 1100u F /25VV i n 1G N D2+5V 3U 2L M 2940T -5.05VD 1L E D 3R 117.2V E N A B L EE N A B L E I N 1I N 2R T 2R T 1E N A B L E 1B12B 23B 34B45B 56B67B78B8G N D 9C O M 108C 117C126C 135C 144C153C 162C 171C 18U 1U L N 2803A4132J 64P I N I N 1I N 2R 14K 7R 24K 75V R T 1R T 25V#include <hidef.h> /* common defines and macros */#include "derivative.h" /* derivative-specific definitions *//************************************************//*锁相环倍频*//************************************************/void pll_xs(void){SYNR=0x44;REFDV=0x81;//总线频率40Mwhile(!CRGFLG_LOCK);while(CLKSEL_PLLSEL!=1)CLKSEL_PLLSEL=1;}/***********************************************//*PWM初始化!*//************************************************/void PWM_int(void){PWMPOL|=0xaa;//PWM Polarity开始输出高电平,1、3、5、7 positive.PWMCLK|=0xaa;//Clock Select, Sn,B:7632.A:0145PWMPRCLK=0x22;//CLOCKA和CLOCKB是4分频是10MPWMCTL=0xf0;PWMSCLA=5;//1MPWMSCLB=5;//1MPWMCAE=0x00;PWMDTY01=900;PWMPER01=1000;PWME=0xaa; //PWM Enable,1、3、5、7 enable.}/************************************************/void main(void) {pll_xs();//倍频DDRB=0xff;PORTB|=0xff;PORTB&=0xfe;//PB0和PB1用来控制电机转向的EnableInterrupts;PWM_int();for(;;) {_FEED_COP(); /* feeds the dog */} /* loop forever *//* please make sure that you never leave main */}。
基于CAN总线的汽车电动车窗控制系统设计毕业论文

基于CAN总线的汽车电动车窗控制系统设计毕业论文目录摘要................................................ 错误!未定义书签。
ABSTRACT............................................ 错误!未定义书签。
1绪论.. (2)1.1 研究背景 (2)1.2 汽车车载网络技术概述 (3)1.3 电动车窗控制技术的发展概况 (4)1.4 课题的主要内容和意义 (5)1.4.1 课题的主要内容 (5)1.4.2 课题的意义 (5)1.5 本章小结 (5)2 CAN总线 (6)2.1 CAN简介 (6)2.2 按照ISO/OSI参考模型CAN的分层结构 (7)2.3 CAN总线数值的特性 (8)2.4 CAN协议的报文帧结构形式 (9)2.4.1 数据帧 (9)2.4.2 遥控帧 (10)2.4.3 错误帧 (11)2.4.4 过载帧 (11)2.4.5 帧间隔 (11)2.5 报文接收和仲裁 (12)2.6 CAN的数据错误检测 (12)2.6.1 错误处理 (12)2.6.2 错误状态种类 (14)2.6.3 错误检测规则 (14)2.7 位时序 (15)2.8 本章小结 (16)3电动车窗的硬件设计 (17)3.1 主控节点的硬件设计 (17)3.1.1 微控制器介绍 (17)3.1.2 CAN模块 (19)3.2 车窗节点的的设计 (25)3.3 本章小结 (29)4基于CAN的车窗控制系统软件设计 (30)4.1 软件开发的环境 (30)4.2 CAN模块 (31)4.2.1 系统主程序 (31)4.2.2 系统的初始化 (31)4.2.3 CAN报文的发送 (32)4.2.4 CAN报文接收 (33)4.3 驱动模块 (34)4.4 本章小结 (35)5车窗防夹功能模拟测试与分析 (36)6总结与展望 (38)6.1 总结 (38)6.2 展望 (38)参考文献 (39)致谢................................................ 错误!未定义书签。
几种电机驱动的比较
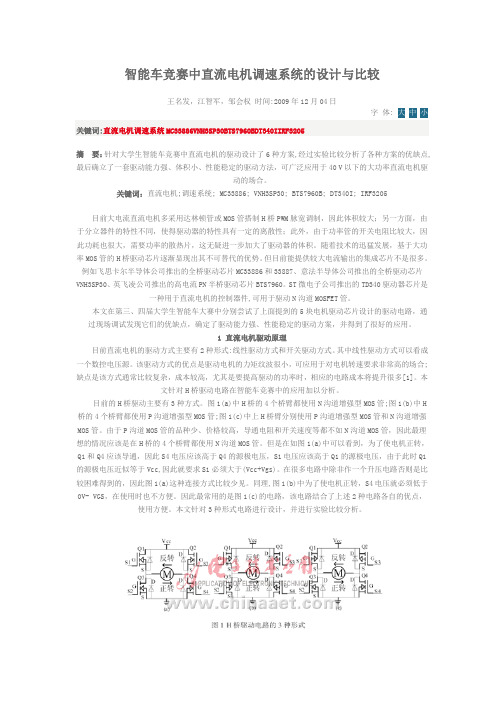
智能车竞赛中直流电机调速系统的设计与比较王名发,江智军,邹会权 时间:2009年12月04日字 体:关键词:直流电机调速系统MC33886VNH3SP30BTS7960BDT340IIRF3205摘 要:针对大学生智能车竞赛中直流电机的驱动设计了6种方案,经过实验比较分析了各种方案的优缺点,最后确立了一套驱动能力强、体积小、性能稳定的驱动方法,可广泛应用于40 V以下的大功率直流电机驱动的场合。
关键词:直流电机;调速系统; MC33886; VNH3SP30; BTS7960B; DT340I; IRF3205目前大电流直流电机多采用达林顿管或MOS管搭制H桥PWM脉宽调制,因此体积较大;另一方面,由于分立器件的特性不同,使得驱动器的特性具有一定的离散性;此外,由于功率管的开关电阻比较大,因此功耗也很大,需要功率的散热片,这无疑进一步加大了驱动器的体积。
随着技术的迅猛发展,基于大功率MOS管的H桥驱动芯片逐渐显现出其不可替代的优势。
但目前能提供较大电流输出的集成芯片不是很多。
例如飞思卡尔半导体公司推出的全桥驱动芯片MC33886和33887、意法半导体公司推出的全桥驱动芯片VNH3SP30、英飞凌公司推出的高电流PN半桥驱动芯片BTS7960。
ST微电子公司推出的TD340驱动器芯片是一种用于直流电机的控制器件,可用于驱动N沟道MOSFET管。
本文在第三、四届大学生智能车大赛中分别尝试了上面提到的5块电机驱动芯片设计的驱动电路,通过现场调试发现它们的优缺点,确定了驱动能力强、性能稳定的驱动方案,并得到了很好的应用。
1 直流电机驱动原理目前直流电机的驱动方式主要有2种形式:线性驱动方式和开关驱动方式。
其中线性驱动方式可以看成一个数控电压源。
该驱动方式的优点是驱动电机的力矩纹波很小,可应用于对电机转速要求非常高的场合;缺点是该方式通常比较复杂,成本较高,尤其是要提高驱动的功率时,相应的电路成本将提升很多[1]。
基于BTS7960B车门控制模块的电动车窗的设计

基于BTS7960B车门控制模块的电动车窗的设计以前曾用机械方法控制的车门系统现在逐渐改成电子控制,越来越多的低端汽车也开始采用电子控制的车门控制系统,利用can或者lin总线通信技术实现四个车门之间的通信。
车窗防夹功能是车门控制系统的难点之一。
门控系统具有多种故障诊断能力,能够及时识别出短路、断路、过热、过载等故障。
本文融合汽车车门掌控模块设计的项目课堂教学,重点了解了电动车窗部分的硬件和软件设计。
对智能功率芯片bts7960在正常运转时的启动特性及故障检测特性展开了研究与分析,并得出了试验结果。
车门控制模块的整体设计图1就是门控模块的原理框图,其中微控制器xc164cs用作掌控所有功率器件的控制器动作,同时对系统状态展开定时监控,发送最合适的故障意见反馈信号,并通过车载网络(如can总线)同时实现与中央车身控制器及其他车门控制器的故障信息和按键控制信息的交换,从而及时在用户界面上显示故障内容并对车门进行实时控制,确保了行车安全。
图1门控模块整体原理框图16位微控制器xc164cs基于增强c166sv2结构,结合了risc和cisc处理器的优点,并且通过mac单元的dsp功能实现了强大的计算和控制能力。
xc164cs把功能强劲的cpu内核和一整套强大的外设单元集成于一块芯片上,使得相连接显得非常有效率和便利。
电动车窗采用两个半桥智能功率驱动芯片bts7960b组合成一个h桥驱动,中央门锁、后视镜和加热器的驱动芯片分别采用tle6208-3g、bts7741g和bsp752r,车灯的驱动芯片采用bts724。
这些器件已提供了完善的故障检测及保护功能够,因而防止了使用过多的分立元件,大大增大了模块体积,并提升了模块的emc (电磁兼容)特性。
车门控制模块的电路主要由以下几部分组成:电源电路、电动车窗驱动电路、后视镜驱动电路、加热器驱动电路、中央门锁驱动电路、车灯驱动电路、can总线接口电路及按键接口电路等。
基于CAN总线的智能电动车窗系统设计

Ke y wo r d s:p o we r w i n d o w;CAN b u s ;d i s t i r b u t e d s t r u c t u r e;c u r r e n t c h a r a c t e is r t i c ;a n t i . p i n c h a l g o it r h m
i n t e l l i g e n t wi n d o w l i f t i n g .Co mp a r e d wi t h t h e t r a d i t i o n a l p o i n t . t o . p o i n t c o mmu n i c a t i o n. i t r e d u c e s w i r e h a r n e s s a n d t h e
能 方 案 、软 硬 件 设计 和 防 夹算 法 等 几个 方 面 进 行 研 究 。该 系 统 基 于 集 成 C A N 控制器 的P 8 x C 5 9 1 单 片机 和 电 机 驱 动 芯
片B T S 7 9 6 0 设 计 为 分 布式 结 构 ,采用 监测 电机 电 流无 传 感 器 的 防 夹算 法 ,还具 有 电 机 保 护 和 智 能 升 窗 等 功 能 。与 传 统 点 对 点通 信 相 比 ,该 系 统 减 少线 束 、 降低 成 本 ,具 有 良好 的实 时性 和 可 移 植 性 ,能 实 现 智 能 控 制 ,有 一 定 的实 用 价 值 和 应用 前 景 。 关 键词 :电动 车 窗 ;C A N 总 线 ;分 布式 结 构 ; 电流 特 性 ;防 夹算 法 中 图分 类号 :U 4 6 3 . 8 3 5 文 献标 识 码 :A 文 章 编 号 :1 0 0 3 — 8 6 3 9 ( 2 0 1 4 ) 0 4 — 0 0 2 3 — 0 4
BTS7960大功率直流电机驱动器设计原理图pcb图及例程

BTS7960大功率直流电机驱动【简要说明】一、尺寸:长76mmX宽65mm X高28mm二、主要芯片:BTS7960、lm2576三、工作电压:控制信号直流3V至12V;驱动电机电压6V至27V四、可驱动直流(6V至27V之间电压的电机)五、最大输出电流43A六、特点:1、具有信号指示和电源指示2、转速可调3、抗干扰能力强输入全光电隔离4、内部具有续流保护5、可单独控制一台直流电机6、PWM脉宽平滑调速(可使用PWM信号对直流电机调速)7、可实现正反转8、此驱动器非常适合控制飞思卡尔智能车,驱动器压降小,电流大,驱动能力强适用场合:单片机学习、电子竞赛、产品开发、毕业设计。
【标注图片】【应用事例】BTS7960直流电机驱动器控制表接线表:控制方式表:【测试程序】/********************************************************************汇诚科技实现功能:BTS7960大功率直流电机驱动_调试程序使用芯片:AT89S52 或者 STC89C52晶振:11.0592MHZ编译环境:Keil作者:zhangxinchun淘宝店:汇诚科技【声明】此程序仅用于学习与参考,引用请注明版权和作者信息!*********************************************************************/ #include<reg52.h>#define uchar unsigned char//宏定义无符号字符型#define uint unsigned int //宏定义无符号整型sbit P2_0=P2^0;//启动sbit P2_1=P2^1;//停止sbit P2_2=P2^2;//正转sbit P2_3=P2^3;//反转sbit P1_0=P1^0;//使能sbit P1_1=P1^1;//IN1sbit P1_2=P1^2;//IN2/********************************************************************延时函数*********************************************************************/ void delay(uchar t)//延时程序{uchar m,n,s;for(m=t;m>0;m--)for(n=20;n>0;n--)for(s=248;s>0;s--);}/********************************************************************主函数*********************************************************************/ main(){while(1){if(P2_0==0){delay(3);if(P2_0==0)//启动{P1_0=0;}}if(P2_1==0){delay(3);if(P2_1==0)//停止{P1_0=1;}}if(P2_2==0){delay(3);if(P2_2==0)//正转{P1_1=1;P1_2=0;}}if(P2_3==0){delay(3);if(P2_3==0)//反转{P1_1=0;P1_2=1;}}}}/********************************************************************结束*********************************************************************/ 【应用原理图】【PCB尺寸图】BTS7960智能功率芯片中文资料BTS7960是NovalithIC家族三个独立的芯片的一部分:一是p型通道的高电位场效应晶体管,二是一个n型通道的低电位场效应晶体管,结合一个驱动晶片,形成一个完全整合的高电流半桥。
多功能护理床开题报告
南阳理工学院
毕业设计(论文)开题报告
机械与汽车工程学院机械设计制造及其自动化专业课题名称:医用多功能护理床设计
学生姓名:杜星宇
学号:1102315026
指导教师:冯庆东
报告日期:2015.01.05
说明:
1. 本报告必须由承担毕业设计(论文)课题任务的学生在接到“毕业设计(论文)任务书”、正式开始做毕业设
计(论文)的第2周或第3周末之前独立撰写完成,并交指导教师审阅。
2. 每个毕业设计(论文)课题撰写本报告一份,作为指导教师、毕业设计(论文)指导小组审查学生能否承担
该毕业设计(论文)课题任务的依据,并接受学校的抽查。
bts7960b原理

bts7960b原理
BTS7960B是一款电机驱动芯片,它的主要工作原理如下:
- 电源供电:BTS7960B需要外部提供适当的电源电压,通常为12V至40V。
- 输入信号控制:BTS7960B接受来自微控制器或其他数字设备的输入信号来控制电机的运行。
它通过两个输入引脚(IN1和IN2)控制一个电机,并通过另外两个输入引脚(IN3和IN4)控制另一个电机。
- PWM调制:为了控制电机的速度,BTS7960B使用脉冲宽度调制(PWM)技术。
通过调整输入信号的PWM占空比,可以控制电机的转速。
- 电流检测:BTS7960B内置了电流检测功能,可以监测电机的输出电流。
这有助于保护电机和驱动器免受过载或短路等故障的影响。
- 保护功能:BTS7960B还具有多种保护功能,包括过热保护、欠压保护和过流保护等。
当检测到异常情况时,它会自动停止输出信号,以防止损坏电机或驱动器。
车门控制模块的电动车窗的设计

图 2 BS 90 T 76 的接 口连接图
B S90 T 7 6 是应 用于 电机驱动 的大 电 在北 方寒冷的 冬天 ,仍能保证车窗 的安 如 图4 所示 ,图 ( ) a 为正常 模式下 I 引 S
硬 件 和 软 件 设 计 。对 智 能 功 率 芯 片 C1 6 结 构 , 合 了RI C和 C S 特性 。 6 S V2 结 S IC B S90 T 7 6 在正常运行时的启动特性 及故 处理器的 优点 ,并且通过 MAC单元的 车门控制模块的 电路 主要 由以下几
障检测特 性进行 了研 究与分析 , 并给 出 DSP功 能 实现 了强大 的计 算和控 制能 部 分组成 :电源 电路 、电动车 窗驱动 电 了试验 结果 。 后视镜驱 动电路 、 热器驱动 电路 、 加 力 。XC14 S把功 能强劲的 C U 内核 路 、 6C P
的 接 口 电路 如 图 2 所 示 。 图 中 的 引 脚
79 60I H l、 79 N 60I l 79 N 、 60I 1 S 、
镜 子 x轴 镜子Y轴
j
L , H 开关 s
BTS7 G 24
76 I 9 0NH2 7 6 I 和 7 6 I2 别连 、 9 0N2 90S 分 接 到 XC1 4 S的 I 0口 P . 、P1 4 6C / 94 L. 、
采 用 过 多 的 分 立 元 件 ,大 大 减 小 了 模 块
本文结 合汽车 车门控制模块设计 的 进行实时控制 ,确保 了行车安 全 。 项 目实践 ,重点介绍 了电动车窗部 分的
并提 高 了模块 的E MC( 电磁兼容 ) 1 6位微控制 器 XC14 CS基于增强 体积 , 6
功 能 。正 常 模 式 下 ,从 I 脚 流 出 的 电 S引
基于CAN总线的汽车电动车窗控制系统设计

基于CAN总线的汽车电动车窗控制系统设计基于CAN总线的汽车电动车窗操纵系统设计THE DESIGN OF CONTROL SYSTEM ABOUT AUTOMOBILE POWER WINDOWS BASED ON THE CANBUS学院(部):机械工程学院专业班级:学生姓名:指导教师:2020 年06 月06 日基于CAN总线的汽车电动车窗操纵系统设计摘要随着2009年汽车产销量突破1300万。
我国差不多一跃成为全球最大的汽车市场。
据统计,电子元器件的价值平均占到整车价值的三成左右。
概而观之,我国汽车电子的需求是庞大的。
在这种庞大的需求求的拉动下,我国汽车电子市场也迎来了飞速进展的时代。
当前,汽车电子的一个进展趋势确实是网络化。
由于电子装置和电子元件在汽车内的应用越来越多,使汽车的布线空间越来越小。
在有线的空间内完成各个电子装置的有效连接,关于传统的点对点式的连接方式来说,是不可能完成的任务。
因此,传统的连接方式成为制约汽车电子进展的一个瓶颈。
这种情形下,汽车操纵网络应时而生。
汽车操纵网络是把应用于互联网上专门成熟的局域网技术应用到汽车内,如此,汽车内各个电子器件只要挂接在同一条总线上,就能够实现器件或装置之间的相互通信了。
如此就解决了由于原件连接过多造成的线束臃肿问题,开创了汽车电子器件热插拔的先河,而且方便了汽车的升级和爱护。
本论文对应用于车身网络中的CAN协议进行了研究,基于CAN总线设计了一种电动车窗操纵系统。
关键词: CAN总线,汽车电子,电动车窗THE DESIGN OF CONTROL SYSTEM ABOUT AUTOMOBILE POWER WINDOWS BASED ON THE CANBUSABSTRACTWith China’s automobile production and sales in 2009 breaking 13 million, China has become the world’s largest automobile market. According to statistics, the average value of electronic components can account for the value of the vehicle about three percent. Overview, China’s demand for automotive electro nics is huge. With the huge demand, China’s automotive electronics market ushered in the era of rapid development.Currently, a trend of automotive electronics is networking. As more and more electronic devices and electronic components are used in automotive, the inside space of automotive is becoming smaller and smaller. In such a limited space to complete the connection of various electronic devices, it is impossible for the traditional point to point connection type. Therefore, the traditional connection of electronic devices has become a bottleneck in the development of automotive electronics. In this case, the vehicle control network has emerged to solve this problem. Vehicle control network is to apply a very sophisticated Internet technology to the car, as long as the various electronic devices of the car are articulated in the same bus, the devices can communicate with each other through the bus. This will resolve the problem of connecting too many electronic components as a result of the cumbersome wiring harness, but also created a vehicle electronic devices hot swap of the ground, to facilitate the upgrading and maintenance of the vehicle easily. This thesis will introduce applied CAN protocol and design a control system of power windows based on CAN bus.KEYWORDS: CAN bus,automotive electronic,power windows名目摘要 (I)ABSTRACT (II)1绪论 (1)1.1 研究背景 (1)1.2 汽车车载网络技术概述 (2)1.3 电动车窗操纵技术的进展概况 (2)1.4 课题的要紧内容和意义 (3)1.4.1 课题的要紧内容 (3)1.4.2 课题的意义 (3)1.5 本章小结 (3)2 CAN总线 (5)2.1 CAN简介 (5)2.2 按照ISO/OSI参考模型CAN的分层结构 (6)2.3 CAN总线数值的特性 (6)2.4 CAN协议的报文帧结构形式 (7)2.4.1 数据帧 (7)2.4.2 遥控帧 (9)2.4.3 错误帧 (9)2.4.4 过载帧 (9)2.4.5 帧间隔 (9)2.5 报文接收和仲裁 (10)2.6 CAN的数据错误检测 (10)2.6.1 错误处理 (10)2.6.2 错误状态种类 (12)2.6.3 错误检测规则 (12)2.7 位时序 (13)2.8 本章小结 (14)3电动车窗的硬件设计 (15)3.1 主控节点的硬件设计 (15)3.1.1 微操纵器介绍 (15)3.1.2 CAN模块 (17)3.2 车窗节点的的设计 (23)3.3 本章小结 (27)4基于CAN的车窗操纵系统软件设计 (28)4.1 软件开发的环境 (28)4.2 CAN模块 (29)4.2.1 系统主程序 (29)4.2.2 系统的初始化 (29)4.2.3 CAN报文的发送 (30)4.2.4 CAN报文接收 (31)4.3 驱动模块 (32)4.4 本章小结 (33)5车窗防夹功能模拟测试与分析 (34)6总结与展望 (36)6.1 总结 (36)6.2 展望 (36)参考文献 (37)致谢................................................ 错误!未定义书签。
一种轿车电动车窗防夹控制系统设计

一种轿车电动车窗防夹控制系统设计张昕;李昌刚;胡俊杰;汪永斌【摘要】为解决汽车电动车窗的防夹设计问题,提出一种新的基于霍尔传感器和车窗电机电流检测的汽车车窗防夹系统设计方案.该方案采用霍尔传感器的脉冲信号数检测车窗位置,并设计了一种在车窗上升期间利用电机电流变化来判断车窗是否遇到障碍物及相应操作的控制算法.最后基于英飞凌XC164CS硬件平台和μC/OS-Ⅱ实时操作系统软件平台实现了该设计方案.试验检测数据表明,该系统具有良好的防夹功能.【期刊名称】《现代电子技术》【年(卷),期】2010(033)017【总页数】4页(P169-172)【关键词】电动车窗;防夹;车门控制系统;霍尔传感器【作者】张昕;李昌刚;胡俊杰;汪永斌【作者单位】浙江万里学院,智能控制研究所,浙江,宁波,315100;浙江万里学院,电子信息学院,浙江,宁波,315100;浙江万里学院,电子信息学院,浙江,宁波,315100;浙江万里学院,电子信息学院,浙江,宁波,315100【正文语种】中文【中图分类】TN710-340 引言随着现代汽车电子技术的进步,汽车内传统的零部件及总成也在向机电一体化发展[1]。
汽车中大量应用的电子设备,不仅提高了汽车的舒适性,也对汽车的安全性提出了新的要求。
为了方便驾驶员和乘客,大量汽车采用电动车窗,许多电动车窗都不具有防夹功能,容易造成对乘员尤其是儿童的伤害。
美国交通部颁布了针对电动车窗开关系统的法规FMVSS118,对车窗防夹相关参数做出了明确规定[2],并规定在2008年10月1日之后在北美出售的轿车和小型货车都必须强制执行该规定。
虽然我国还没有就该问题做出法律上的规定,但为安全起见,开发具有防夹功能的车窗控制模块是完全必要的。
参考了文献[3-5]后,本文的防夹设计方案采用将霍尔传感器检测电机转速和检测电机电流变化情况结合起来实现防夹功能,该方案避免了车窗防夹系统易受外界环境影响的缺陷,确保防夹效果可靠,成本较低,可以不必改动传统车门的生产工艺,在改造电动车窗无防夹功能的老车型时,可以不改变现在已成型的汽车车门的机械结构和电路结构,只需替换电动车窗升降控制器, 十分方便。
车门控制模块的电动车窗的设计

车门控制模块的电动车窗的设计
吴海燕;吴志红;朱元;刘宋涛
【期刊名称】《今日电子》
【年(卷),期】2006(000)009
【摘要】以前曾用机械方法控制的车门系统现在逐渐改成电子控制,越来越多的低端汽车也开始采用电子控制的车门控制系统,利用CAN或者LIN总线通信技术实现四个车门之间的通信。
车窗防夹功能是车门控制系统的难点之一。
门控系统具有多种故障诊断能力,能够及时识别出短路、断路、过热、过载等故障。
【总页数】4页(P74-77)
【作者】吴海燕;吴志红;朱元;刘宋涛
【作者单位】同济大学中德学院,英飞凌-同济大学汽车电子实验室;同济大学中德学院,英飞凌-同济大学汽车电子实验室;同济大学中德学院,英飞凌-同济大学汽车电子实验室;同济大学中德学院,英飞凌-同济大学汽车电子实验室
【正文语种】中文
【中图分类】TP3
【相关文献】
1.无传感器电动车窗防夹控制模块的研制 [J], 刘广敏;王知学;马建辉
2.SPI接口在车门控制模块中的应用 [J], 陶金;陈文鑫;王景成
3.威驰轿车右后车门电动车窗无法升降的故障排除 [J], 周沛丽; 李雪永
4.基于电机电流检测的乘用车车门控制模块设计 [J], 刘建松;徐洋;谭伟;江松;熊秋
涵
5.车门集成控制模块系统方案设计 [J], 仰珊珊
因版权原因,仅展示原文概要,查看原文内容请购买。
一种新型智能车电机驱动电路的设计与实现概要

产品设计与开发roduct Design and Development一种新型智能车电机驱动电路的设计与实现 New Design and Realization of the M otor Driver Circuit for the Intelligent Car陈军 , 杨数强 , 王军强 (洛阳师范学院 , 河南洛阳 471022Chen J un,Yang Shu-qiang,Wang J un-qiang (LuoyangNormal University,HenanLuoyang 471022摘要:设计了基于 BTS7960芯片的电机驱动电路, 详细分析了芯片的特点和电路功能。
在驱动电路的输出端加入了短路自动断电保护电路, 分析了电路的工作原理。
对驱动电路进行了 10KHz 、 30%占空比的 PWM 驱动实验, 在占空比从15%变化到 40%的 PWM 信号驱动下, 测量了芯片的温度变化, 结果证明该电路能够实现设计功能并具有较好的温度稳定性。
关键词:智能车; BTS7960; 驱动电路中图分类号:TP213.13文献标识码:A 文章编号:1003-0107(201109-0032-03Abstract:Designed a motor driver circuit based on BTS7960,explained the characteristics of the chip and the theories of circuit partic-ularly.Added a automatic protective circuit which could cut off when the circuit was short out.The circuit was tested by the PWM wave, frequence was 10KHz,duty cycle was 30%.Whilethe circuit was working under the PWM signal of duty cycle from 15%to 40%,thechip temperatures were measured.The results proved that the circuit realized the design function and had better temperature stability.Key w ords:intelligent car;BTS7960;driving circuitCLC num ber:TP213.13Docum ent code:A Article ID:1003-0107(201109-0032-03 1前言智能车是光机电控一体化技术等最新科技成果与汽车技术相结合的产物,目前已经成为智能机器人研究领域的一个重要基础环节。
电动车窗系统教案

电动车窗系统教案电动车窗系统1.了解电动车窗系统的组成2.掌握电动车窗系统的工作原理3.熟悉系统控制电路系统控制电路多媒体别克君威实车卡罗拉实车万用表常用拆装工具电路图电动车窗系统的工作原理电动车窗功能课后题电动车窗系统问题:1.电动车窗是目前乘用车的标准配置,其有何作用?2.电动车窗系统有何功能?3.电动车窗系统由哪些部件构成?4.电动车窗系统有哪些常见故障,如何检修?一、电动车窗系统的概述为了使驾驶员更加集中精力驾车,方便驾驶员及乘客的操作,许多轿车采用了电动车窗。
驾驶员和乘客只需操纵车窗升降开关,就可以使汽车门窗玻璃自动上升或者下降。
1-自动上升2-手动上升3-手动下降4-自动下降手动升降锁止一键升降(防夹)自诊断(带ECU)二、电动车窗系统的组成1电动车窗体系由车窗、车窗升降器、电动机、控制开关等组成。
电动车窗结构图控制开关图5min15min实车演示亲身体验25min实车拆装演示认知各个三、电动车窗系统的工作原理1、主开关的控制原理10min别克君威左前窗开关控制原理图别克君威左前窗开关一键式控制原理图10min别克君威右后窗开关控制原理图当开关打到不同位置时,电源从不同的触点引入,控制电机不同的工作模式。
3、电动机的控制原理由于电动车窗的动作是双向(升降)的,所以改变通过电动机的电流方向,从而控制电动机的转动方向。
4、电动车窗系统的工作原理12V2、分隔关的控制原理左前车窗开关左前车窗开关右前车窗开关右前车窗开关左后车窗开关左后车窗开关右后车窗开关右后车窗开关M左前车窗电机M右前车窗电机M左后车窗电机M右后车窗电机四、电动车窗系统的控制电路1、别克君威25min2、丰田卡罗拉5、故障诊断别克君威与丰田卡罗拉故障1:电动车窗体系不工作故障2:驾驶员侧电动车窗不工作故障3:副驾驶侧电动车窗不工作1讨论设计诊断流程2汇报诊断流程3评价反馈4修改诊断流程5实践操纵6总结汇报15min15min10min5min40min。
机器人课程设计报告

智能机器人课程设计总结报告姓名:组员:指导老师:时间:一、课程设计设计目的了解机器人技术的基本知识以及有关电工电子学、单片机、机械设计、传感器等相关技术。
初步掌握机器人的运动学原理、基于智能机器人的控制理论,并应用于实践。
通过学习,具体掌握智能机器人的控制技术,并使机器人能独立执行一定的任务。
基本要求:要求设计一个能走迷宫(迷宫为立体迷宫)的机器人。
要求设计机器人的行走机构,控制系统、传感器类型的选择及排列布局。
要有走迷宫的策略(软件流程图)。
对于走迷宫小车控制系统设计主要有几个方面:控制电路设计,传感器选择以及安放位置设计,程序设计二、总体方案2.1 机器人的寻路算法选择将迷宫看成一个m*n的网络,机器人通过传感器反馈的信息感知迷宫的形状,并将各个节点的与周围节点的联通性信息存储于存储器中,再根据已经构建好的地图搜索离开迷宫的路径。
这里可选择回溯算法。
对每个网格从左到右,每个网格具有4个方向,分别定义。
并规定机器人行进过程中不停探测前方是否有障碍物,同时探测时按左侧规则,进入新网格后优先探测当前方向的左侧方向。
探测过程中记录每个网格的四个方向上的状态:通路、不通或未知,探测得到不同状态后记记录,同时记录当前网格的四个方向是否已被探测过。
若某网格四个方向全部探测过则利用标志位表示该网格已访问。
为了寻找到从起点到终点的最佳路径,记录当前网格在四个方向上的邻接网格序号,由此最后可在机器人已探测过的网格中利用Dijkstra算法找到最佳路径。
并为计算方便,记录网格所在迷宫中行号、列号。
并机器人探索过程中设置一个回溯网格栈记录机器人经过的迷宫网格序号及方向,此方向是从一个迷宫网格到下一个迷宫网格经过的方向。
设置一个方向队列记录机器人在某网格内探测方向的顺序。
设置一个回溯路径数组记录需要回溯时从回溯起点到回溯终点的迷宫网格序号及方向。
考虑到迷宫比较简单,且主要为纵横方向的直线,可采用让小车在路口始终左转或者始终右转的方法走迷宫,也就是让小车沿迷宫的边沿走。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
以前曾用机械方法控制的车门系统现在逐渐改成电子控制,越来越多的低端汽车也开始采用电子控制的车门控制系统,利用CAN或者LIN总线通信技术实现四个车门之间的通信。
车窗防夹功能是车门控制系统的难点之一。
门控系统具有多种故障诊断能力,能够及时识别出短路、断路、过热、过载等故障。
本文结合汽车车门控制模块设计的项目实践,重点介绍了电动车窗部分的硬件和软件设计。
对智能功率芯片BTS7960在正常运行时的启动特性及故障
检测特性进行了研究与分析,并给出了试验结果。
车门控制模块的整体设计
图1是门控模块的原理框图,其中微控制器XC164CS用于控制所有功率器件的开关动作,同时对系统状态进行定时监控,接收合适的故障反馈信号,并通过车载网络(如CAN总线)实现与中央车身控制器及其他车门控制器的故障信息和按键控制信息的交换,从而及时在用户界面上显示故障内容并对车门进
行实时控制,确保了行车安全。
图1 门控模块整体原理框图
16位微控制器XC164CS基于增强C166S V2结构,结合了RISC和CISC处理器的优点,并且通过MAC单元的DSP功能实现了强大的计算和控制能力。
XC164CS把功能强劲的CPU内核和一整套强大的外设单元集成于一块芯片上,使得连接变得非常有效和方便。
电动车窗采用两个半桥智能功率驱动芯片BTS7960B组合成一个H桥驱动,中央门锁、后视镜和加热器的驱动芯片分别采用TLE6208-3G、BTS7741G 和BSP752R,车灯的驱动芯片采用BTS724。
这些器件已提供了完善的故障检测及保护功能,因而避免了采用过多的分立元件,大大减小了模块体积,并提高
了模块的EMC(电磁兼容)特性。
车门控制模块的电路主要由以下几部分组成:电源电路、电动车窗驱动电路、后视镜驱动电路、加热器驱动电路、中央门锁驱动电路、车灯驱动电路、
CAN总线接口电路及按键接口电路等。
电动车窗的硬件设计
1 电动车窗驱动电路及启动特性
本车窗控制系统通过智能功率芯片BTS7960驱动直流电机转动,BTS7960的接口电路如图2所示。
图中的引脚7960INH1、7960IN1、7960IS1、7960INH2、7960IN2和7960IS2分别连接到XC164CS的I/0口P9.4、P1L.4、P5.6、P9.5、P1L.5和P5.7。
图2 BTS7960接口连线图
BTS7960是应用于电机驱动的大电流半桥高集成芯片,它带有一个P沟道的高边MOSFET、一个N沟道的低边MOSFET和一个驱动IC。
P沟道高边开关省去了电荷泵的需求, 因而减小了EMI。
集成的驱动IC具有逻辑电平输入、电流诊断、斜率调节、死区时间产生和过温、过压、欠压、过流及短路保护的功能。
BTS7960通态电阻典型值为16mΩ,驱动电流可达43A。
因此即使在北方寒冷的冬天,仍能保证车窗的安全启动。
如图3所示,两片BTS7960构成全桥驱动车窗上升或下降。
T1和T4导通时,车窗上升;T2和T3导通时,车窗下降。
系统没有主动制动过程,车窗移好之后,上管触发信号停,通过该桥臂下管反并联二极管续流,直到电流为0A。
续流过程持续250ms,足以满足车窗电机大功率的需求。
为了避免车窗电机启动瞬间出现电流尖峰,通过对下桥臂开关管进行频率为20kHz的PWM信号控制,实现软启动功能。
2 BTS7960故障检测特性
如图3所示,BTS7960的芯片内部为一个半桥。
INH引脚为高电平,使能BTS7960。
IN引脚用于确定哪个MOSFET导通。
IN=1且INH=1时,高边MOSFET导通,OUT引脚输出高电平;IN=0且INH=1时,低边MOSFET导通,OUT引脚输出低电平。
SR引脚外接电阻的大小,可以调节MOS管导通和
关断的时间,具有防电磁干扰的功能。
IS引脚是电流检测输出引脚。
图3 全桥驱动电路示意图
BTS7960的引脚IS具有电流检测功能。
正常模式下,从IS引脚流出的电流与流经高边MOS管的电流成正比,若RIS=1kΩ,则V IS=I load/8.5;在故障条件下,从IS引脚流出的电流等于I IS(lim) (约4.5mA),最后的效果是IS为高电平。
如图4所示,图(a)为正常模式下IS引脚电流输出,图(b)为故障条
件下IS引脚上的电流输出。
BTS7960短路故障实验的实验条件如下:+12.45V电池电压,+5V电源供电,2.0m短路导线(R=0.2Ω),横截面积为0.75 mm,连接1kΩ电阻和一个发光二极管。
V S与电池正极间导线长1.5m(R=0.15Ω)。
如图5所示,其中V IS是IS引脚对地的电压、V L是OUT引脚对地电压,I L为发生对地短
路故障时,流过BTS7960的短路电流。
(a)(b)
图4 BTS7960电流检测引脚IS的工作原理图
无论是先上电后短路还是先短路后上电,BTS7960都呈现出相同的保护特性,所以下文将只就其一进行讲述。
图5 BTS7960的对地短路实验电路图
图6和图7分别为BTS7960先短路后上电短路实验波形图的前半部分和后半部分。
短路瞬间输出端电流迅速上升,在80μs的时间内,电流上升到峰值,可达62A左右。
此时,BTS7960检测出短路故障,关断MOS管,输出电流下降直至0A, 紫色箭头所指部分有明显的关断,图中虚线所夹部分为MOS管的关断及维持关断的过程,整个过程持续时间约为80μs。
短路导通瞬间,OUT引脚输出电压为5V左右,这是短路导线与电池和地之间的总电阻的分压值;MOS管关断期间,OUT引脚输出电压为0V。
在电流急剧下降的瞬间,短路导线上感应出微弱的反向电动势,所以OUT引脚输出电压会呈现出短时间负电压。
状态检测引脚IS在5V左右上下波动,其具有随短路电流上下波动的特点。
整个短路过程中,BTS7960周期性的关断MOS管,防止短路电流使芯片持续升温,
导致芯片过热烧毁,从而有效地保护了芯片。
最后,BTS7960完全关断MOS管,短路电流缓降为0A,IS管脚在MOS管完全关断后约500μs由自身的冷却
恢复至正常电平。
图2 BTS7960短路实验波形图前半部分
图7 BTS7960短路实验波形后半部分
电动车窗的软件设计
1 驱动芯片BTS7960的软件设计
电动车窗部分,在硬件上通过BTS7960驱动直流电机转动,使窗上升或下降。
采用两片BTS7960B构成全桥工作。
BTS7960与微控制器的接口信号包括IN1、IN2、INH1和INH2;IS1和IS2是电流检测信号。
车窗上升:IN1=1,IN2=0,INH1/2=1;车窗下降:IN1=0,IN2=1,INH1/2=1。
整个驱动过程可分为软启动、满PWM输出、续流和停止四个阶段。
车窗升降过程通过对下桥臂开关管进行PWM控制实现软启动功能,PWM频率为20kHz,软启动持续200ms,在这一过程中,占空比逐渐增大,从0%增加到100%,分成10段,每段持续时间为20ms。
PWM信号是施加在下管所在桥臂的INH引脚上,该桥臂关断(INH=0)时电流通过上管的反并二极管续流。
经PWM信号实现软启动后,电动车窗启动时的电流波形如图8所示。
从图中可以看
出,电流尖峰被有效抑制。
本系统没有主动制动过程,车窗移好之后,开关管还会工作大约250ms,这是续流过程,这期间,上管触发信号停,通过该桥臂下管反并联二极管续流(这时需继续给原来另一桥臂的下管触发信号,如正续流时:IN1=1,INH1=0,IN2=0,INH2=1),直到电流为0。
但是如果出现过热,这种续流过程就不
需要了。
电机堵转是不允许的,因为这样会出现过流。
BTS7960自身可以检测开关管的电流,通过2.2kΩ的采样电阻电流进行电流/电压转换,采样电压经过简单的RC滤波网络,经过一个保护电阻(未加入)送到AN0/AN1进行模数转换。
当检测到电流大于15A时,就可以判断出电机正处于堵转状态,此时微控
制器停止触发电机(仍需续流),用户可以重新启动车窗。
车窗部分要检测的故障有上桥臂的两个开关管过热和负载开路。
检测方法一是通过BTS7960内置的温度检测功能来检测上管的过热,发生过热时器件自动关断所有输出电路,且IS引脚输出电平为高;二是需要辅助晶体管检测开路,通过检测IS引脚电流值可以实现,需要微控制器提供CTRLWIN信号。
图8 电动车窗软启动电流波形
2 电动车窗主程序的软件设计
本电动车窗控制系统的软件控制是基于状态的转换。
通过比较系统状态与控制命令做出判断,确定出目前系统应该执行的动作。
程序中将电动车窗的运行状态做了如下划分:WINDOW_OFF、WINDOW_UP_PWM、WINDOW_UP、WINDOW_UP_FREE、WINDOW_UP_STOP、WINDOW_DOWN_PWM、WINDOW_DOWN、WINDOW_DOWN_FREE和WINDOW_DOWN_STOP。
当电动车窗处于OFF状态,接收到上升或下降的命令,程序会使车窗先进入PWM 渐增的状态,实现软启动。
当达到PWM满占空比时,车窗才转入UP或DOWN的状态。
若在PWM渐增状态或PWM满占空比运行时接收到要让电动车窗停下或要反方向转的命令,程序会让车窗进入续流状态。
续流完成,车窗进入STOP状态。
在任何状态下如果检测到开路或过压等故障,车窗会进入OFF状态。