测量程序集111
汇编语言程序设计习题集111

汇编语言程序设计习题集111《汇编语言程序设计》习题一、选择题1. 机器数为10000000B, 它代表-127D,则它是(C )。
A. 补码B. 原码C. 反码D. 原码或反码2.[x1]原=10111101B, [x2]反=10111101B, [x3]补=10111101B (C )。
A. x1最小B. x2最小C. x3最小D. x2=x1=x33.计算机的内存“溢出”是指其运算结果()。
A .为无穷大B .超出了计算机内存储单元所能存储的数值范围C .超出了该指令所指定的结果单元所能存储的数值范围D .超出了一个字所能表示数的范围4. [x1]原=11001010B, [x2]反=11001010B, [x3]补=11001010B ,那么它们的关系是()。
A. x3>x1>x2B. x2>x3>x1C. x3>x2>x1D. x2>x1>x35. 在计算机中表示地址时使用(A )。
A 无符号数B 原码C 反码D 以上都不对6. 下面说法错误的是(D )。
A 8位二进制无符号数表示的最大十进制数是255B 8位二进制带符号数表示的最大十进制数是127C 计算机中无符号数最常用于表示地址D 计算机中小数点隐含在符号位之后,占一位7. 只有当与非门的输入变量A 、B 的值为()时,其输出才为0。
A 0,0B 0,1C 1,0D 1,18. 只有当或非门的输入变量A 、B 的值为()时,其输出才为1。
A 0,0B 0,1C 1,0D 1,19. 若逻辑运算Y=A+B, 当A=B=1时,Y 为()。
A 0B 1C 10D 210. 若门电路的两个输入量为1、1,输出量为0,不可能完成此功能的是()。
A “异或”门B “与非”门C “或非”门D “与”门11. 下列不正确的是()A A AB A B +=+ B _____AB A B =+C AB B AB A B ++=+D A B A B +=12.已知V AR 为字节变量,下面是关于①MOV BX, OFFSET V AR 和②LEA BX, V AR 指令的说明,正确的是()。
道路测量程序大全(2)
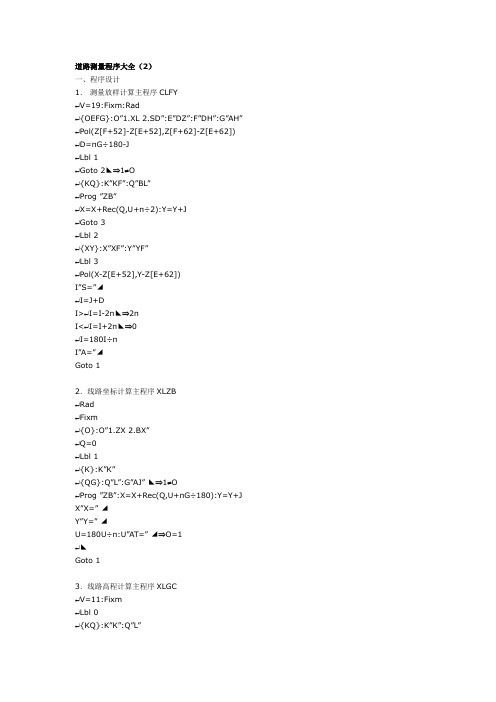
道路测量程序大全(2)一、程序设计1.测量放样计算主程序CLFY↵V=19:Fixm:Rad↵{OEFG}:O”1.XL2.SD”:E”DZ”:F”DH”:G”AH”↵Pol(Z[F+52]-Z[E+52],Z[F+62]-Z[E+62]) ↵D=πG÷180-J↵Lbl 1↵Goto 2◣⇒1≠O↵{KQ}:K”KF”:Q”BL”↵Prog ”ZB”↵X=X+Rec(Q,U+π÷2):Y=Y+J↵Goto 3↵Lbl 2↵{XY}:X”XF”:Y”YF”↵Lbl 3↵Pol(X-Z[E+52],Y-Z[E+62])I”S=”◢↵I=J+DI>↵I=I-2π◣⇒2πI<↵I=I+2π◣⇒0↵I=180I÷πI”A=”◢Goto 12.线路坐标计算主程序XLZB↵Rad↵Fixm↵{O}:O”1.ZX2.BX”↵Q=0↵Lbl 1↵{K}:K”K”↵{QG}:Q”L”:G”AJ”◣⇒1≠O↵Prog ”ZB”:X=X+Rec(Q,U+πG÷180):Y=Y+J X”X=”◢Y”Y=”◢U=180U÷π:U”AT=”◢⇒O=1↵◣Goto 13.线路高程计算主程序XLGC↵V=11:Fixm↵Lbl 0↵{KQ}:K”K”:Q”L”↵Prog ”KD”↵Prog ”GC”C”H=”◢Goto 04.边桩放样计算主程序BZFY↵Fixm↵Rad↵{Z}:Z”1.CJ 2.QZ 3.QS”↵Z[11]=0:Goto 1◣⇒Z=2↵ Goto 1◣⇒Z=3↵{MNGU}:M”DZ”:N”DH”:G”HZ”:U”AH”↵Z[8]=Z[M+52]:Z[9]=Z[M+62]↵C=Z[N+52]:A=Z[N+62]↵Pol(C-Z[8],A-Z[9]):Z[10]=J-πU÷180:Z[11]=G↵Lbl 1↵Goto 2◣⇒Z=2↵{EBFD}:B”AQ”:E”S”:D”HD”:F”HY”↵Rec(E,Z[10]+πB÷180):X=Z[8]+I:Y=Z[9]+J:Goto 3 ↵Lbl 2↵{EBD}:E”N”:B”E”:D”Z”:F=0:X=E:Y=B↵Lbl 3↵Prog “FQ”G=D+Z[11]-F:G”H”◢↵Prog “FY”Goto 15.线路坐标计算子程序ZB↵Prog ”YS”↵X=74445.797↵Y=501515.278↵S=771.296-K↵B=A+C+πS>↵Goto 1◣⇒L↵I=SSS÷6÷R÷L↵J=S-S^5÷(40RRLL)↵U=B-SS÷(2RL)-π:Goto 2↵Lbl 1↵U=(2S-L)÷R÷2↵I=R(1-cos U)+Z[5]:J=Rsin U+Z[6]↵U=B-(S-L÷2)÷R+π↵Lbl 2↵Pol(I,J):J=J+B-π÷2↵X=Rec(I,J)+X↵Y=Y+JU<U=U+2π◣⇒06.曲线要素计算子程序YS↵R=280↵L=84.7↵S=-0.6769479859↵A=-2.415291254↵N=-1↵C=1.738343268↵Z[5]=1.067572917↵Z[6]=42.31770592↵T=374.9146895Z[7]=RC+L7.线路高程计算子程序GC↵W=13↵Lbl 1↵P=Z[W+7]K>↵W=W+1:Goto 1◣⇒Z[W]-P ↵W=14◣⇒W=13↵Goto 2◣⇒V=W-1↵V=W-1↵J=Z[V+4]↵R=(J-Z[V+3])÷(Z[V]-Z[V-1]) ↵S=(Z[V+5]-J)÷(Z[V+1]-Z[V]) ↵T=Z[V+7]↵Lbl 2↵L=K-Z[V]↵H=J+RL:Goto 3◣⇒L≤-T↵H=J+SL:Goto 3◣⇒L≥T↵A=2T÷(S-R)↵X=L+A(R+S)÷2↵H=J+XX÷2÷A-ARS÷2↵Lbl 3↵H=H-Z[1]↵A=Abs Q↵C=0:Goto 6◣⇒A≤Z[4]↵I=-1Q>↵I=1◣⇒0↵Lbl 4↵Y=23↵Lbl 5↵Y=Y+1:Goto 5◣⇒K≥Z[Y]↵O=Z[Y+2]:X=Z[Y+3]:O=IO:X=IX↵O=2◣⇒Z[Y+2]=0↵X=2◣⇒Z[Y+3]=0↵N=(Z[Y]-K)÷(Z[Y]-Z[Y-1])↵M=(X-O)(1-3NN+2NNN)+O↵C=(Z[4]-A)M÷100:Goto 6◣⇒A≤Z[2]↵C=0.04(Z[2]-A)-M(Z[2]-Z[4])÷100M>↵C=(Z[4]-A)M÷100◣⇒4↵Lbl 6C=H+C8.反求线路桩号子程序FQ↵Prog ”YS”↵Z[4]=74445.797↵Z[3]=501515.278↵K=771.296:Q=0:Goto 2◣◣⇒Z[3]=Y⇒Z[4]=X ↵Q=Z[4]:K=Z[3]:G=S+π÷2↵Prog ”ZH”↵G=LL÷6÷R:Q=L-LLL÷40÷R÷R↵Pol(G-H,Q-W):K=J+π÷2+L÷2÷Rcos K<↵Goto 1◣⇒0↵Pol(H-(R+Z[5]),W-Z[6])↵K=771.296-R(π-J)-L÷2↵Q=R-I↵Goto 2↵Lbl 1↵K=1:U=L↵Prog ”HQ”↵K=771.296-O:Q=-Q↵Lbl 2↵M=1000↵K=Intg (MK+0.5)÷M↵Q=Intg (MQ+0.5)÷MZ”KD=”◢Q”WB=”◢9.坐标转换计算子程序ZH↵H=X-Q:W=Y-K↵Pol(H,W)↵G=J-GH=Icos G:W=Isin G10.反求缓曲长度子程序HQ↵A=K÷46080÷R^6÷U^6↵P=H÷3840÷R^5÷U^5↵C=13K÷5760÷R^4÷U^4↵T=KW÷384÷R^4÷U^4↵G=H÷48÷R^3÷U^3↵I=K÷(15RRUU)↵J=KW÷(8RRUU)↵L=H÷(2RU)↵N=KW↵S=W↵Lbl 7M=AS^13+PS^10-CS^9+TS^8-GS^6+IS^5-js↵^4+LSS-KS+NQ=13AS^12+10PS^9-9CS^8+8TS^7-6GS^5+5IS^4-4js↵^3+2LS-K ↵O=S-M÷QAbs (O-S)<↵Goto 8◣⇒1E-5↵S=O↵Goto 7↵Lbl 8↵T=KOOO÷6÷U÷R↵P=O-O^5÷(40RRUU)↵Q=0:Goto 9◣◣⇒P=W⇒T=H↵Pol(H-T,W-P)↵Q=sin (J+KOO÷2÷R÷U-π÷2)↵S=-1Q>↵S=1◣⇒0↵Q=SILbl 911.边桩放样计算子程序FY↵V=11↵U=Q↵Prog ”KD”↵Q=-0.75-Z[2]:Z[3]=-1U>↵Q=0.75+Z[2]:Z[3]=1◣⇒0↵Prog ”GC”↵X=G-C↵Goto 7◣⇒X≤0↵N=Int ((X-0.1)÷8.9)+1N>↵N=5◣⇒5↵I=1↵Lbl 2↵O=Z[28+I]↵{O}:O”M”↵Z[28+I]=O↵I=I+1I>↵Goto 4◣⇒N+1↵Goto 2↵Lbl 4↵I=0↵W=3.55+Z[2]:H=0.04↵Lbl 5↵I=I+1I>↵Goto 6◣⇒N-1↵W=W+2+9Z[I+28]↵H=H+8.9↵Goto 5↵Lbl 6A=X-H:A”C=”◢W=W-Abs UP=WZ[3]◢⇒A≤1↵◣P=(9Z[I+28]+W+2)Z[3]◢⇒A≥8↵◣↵A=AZ[I+28]+W↵Goto 8↵Lbl 7↵X=-X↵A=1.5X+0.75+Z[2]-Abs U◣⇒X≤8X>↵A=12.75+Z[2]+1.75(X-8)-Abs U◣◣⇒X≤12⇒8 X>↵A=14.75+Z[2]+1.75(X-8.04)-Abs U◣⇒12↵Lbl 8↵A=AZ[3]A”DB=”◢12.路面宽度计算子程序KD↵Z[2]=10.5↵Z[4]=0.5K>K⇒460<↵Z[4]=0◣◣⇒540↵Goto 6◣⇒Abs Q≤Z[4]Q>↵Goto 1◣⇒0K<↵I=50:X=K-370.6255:Goto 2◣⇒370.6255K>↵I=41:X=K-430:Goto 2◣◣⇒K≤467.384⇒430 K>K⇒467.384<↵Goto 3◣◣⇒532.616K⇒K≥532.616<↵I=41:X=570-K:Goto 2◣◣⇒570 K>↵I=35:X=K-686.596:Goto 2◣⇒686.596↵Goto 5◣↵Lbl 1K<↵I=47:X=K-350.4277:Goto 2◣⇒350.4277K>↵I=44:X=K-430:Goto 2◣◣⇒K≤463.545⇒430K>K⇒463.545<↵Goto 4◣◣⇒536.455K⇒K≥536.455<↵I=44:X=570-K:Goto 2◣◣⇒570K>↵I=38:X=K-686.596:Goto 2◣⇒686.596↵Goto 5◣↵Lbl 2↵Z[2]=Z[I]XXX+Z[I+1]XX+Z[I+2]X+10.5:Goto 5↵Lbl 3↵Z[2]=299.104÷sin (1.4543+(K-467.384)÷280)-280:Goto 5 ↵Lbl 4↵Z[2]=280-267.304÷sin (1.4406+(K-463.545)÷280)↵Lbl 5L=Z[2]+0.75:L”LD=”◢Lbl 6。
卡西欧测量程序集

CASIO fx 系列编程计算器测量程序集编写: 王劲松第一部分:CASIO fx-4800P 编程计算器测量程序集一.SHI JU CE TU (视距测图)1. 用途:该程序用于“经纬仪视距法碎部测量”时,计算测站点至碎部点间的平距及碎部点的高程。
2. 程序清单:C “H0”:I :A “UP ”:B “DOWN ”:V “MIDDLE ”:L :E=90-L ↙ D=100Abs (A-B )(cosE )2◢ H=(C+I )+DtanE-V 3. 程序说明:H0——测站点高程;I ——测站仪器高;UP ——塔尺上丝读数;DOWN ——塔尺下丝读数;MIDDLE ——塔尺中丝读数;L ——经纬仪竖盘读数盘左读数;D ——测站点至碎部点间平距;H ——碎部点的高程。
5.该程序若在fx-3950中的程序清单为:?→M :?→A :?→B :?→C :?→D :100(A-B )(cos(90-D))2→X ◢ M+Xtan(90-D)-C →Y说明:M ——将测站高程H0+仪器高I ;A ——上丝读数;B ——下丝读数;C ——中丝读数;D ——竖盘盘左读数L 。
X ——测站点至碎部点的平距;Y ——碎部点的高程。
二.FAN SUAN (反算)1.用途:该程序是“坐标反算公式”程序,用于根据两点1、2的平面坐标(X1,Y1)、(X2,Y2),计算两点间的距离D12及坐标方位角A12。
2. 程序清单:G “X1”:B “Y1”:C “X2”:H “Y2”:E=C-G :F=H-B ↙ Pol (E ,F ):I “D12”◢ ∆+=⇒<3600J J J J “A12” 3. 程序说明:X1,Y1——点1的平面坐标;X2,Y2——点2的平面坐标; D12——点1至点2间平距;A12——点1至点2坐标方位角。
由于编程时用到了极坐标函数POL (),故在程序运行中,会出现I=?XXX (数字)及J=?XXX (数字)这是函数POL 计算出的两个量,不能改变,直接回车默认即可。
《测量程序设计》
《测量程序设计》课程教学大纲课程编号:035087 学分:2 总学时:34大纲执笔人:姚连璧大纲审核人:陈义一、课程性质与目的《测量程序设计》是测绘工程专业的一门专业技术基础课,通过教学,学生应掌握软件工程的基本概念、程序设计PAD图、水准网平差、平面控制网的平差原理、Schreiber法则、近似坐标的计算、误差方程和法方程的组成与解算、精度评定方法、自由网平差及其结果的相互转换等内容并利用Matlab语言编制一定量的程序。
二、课程基本要求通过学习对软件工程有一个初步的概念和认识,进一步加深了解控制网平差的基本原理和方法,掌握控制网平差的程序设计方法,并有能力利用Matlab语言进行控制网的平差计算的程序设计。
三、课程基本内容第一章(软件工程导论)介绍软件工程的基本概念,包括软件的生存周期并对生存周期中的各个环节进行较详细的介绍,包括可行性研究与需求分析、总体设计与详细设计、PAD 图、编码、软件维护等部分,目的是对软件设计和编程起到指导作用。
第二章(MATLAB程序设计基础)介绍MATLAB程序设计基础、数据文件的输入与输出、二维绘图以及图形用户界面设计。
第三章(平差计算的基本理论)介绍平面控制网间接平差原理、改进的导线网结点平差理论以及自由网平差及其成果的相互转换。
第四章(线性方程组的解)介绍高斯(GAUSS)消去法、非对称方程组求解、对称方程组求解、对称方程组按上三角一维存放、对称方程组按下三角一维存放、列主元消去法消去法求逆矩阵、稀疏线性方程组的形式与解算、改进的平方根法求逆阵;介绍水准网平差的三种方法:一维压缩存储法方程平差程序、上三角存储法方程平差程序、利用MATLAB矩阵运算平差程序以及利用平差结果的相互转换变换基准的程序。
第五章(平面控制网平差计算程序设计)介绍变量的约定、观测数据的组织与输入、误差方程式的组成、平差值计算与精度评定包括平差值与精度评定、坐标改正数以及单位权中误差的计算、点位误差椭圆和相对点位误差椭圆元素的计算、观测值的平差值、改正数及精度评定等。
《测量程序设计》第5章:第5讲5800存储、统计回归计算

独立存贮器(M)
4
答案存贮器(Ans)
答案存贮器可以存储最近一次执行的计算结果。 用好答案存贮器,可以提高我们的计算速度。
例如:231°12′33″+99°58′04″-180=151°10′37″ Sin(Ans)=0.482106 (注:Ans 存放的是上一计算结果 151°10′37″)。
编辑较大阵容程序时,从 A~Z 的 26 个英文字母不 够用,此时可添加额外变量。添加额外变量的句法是:
N→DimZ 句法中,n 是数字,是 根据程序内容需要添加额外 变量数。D imZ,意 外额外变量,按 SHIFT(DimZ)键 输入 DimZ。 额外变量名称由字母“Z”和字母“Z”后的方括号及 方括号括起的数字组成,其形式如下: Z[I] 括号中的 I 可以是 1~n。
最新版
《测量程序设计》 备课课件
第5章:第5讲5800存储、统计回归计算
易俊
1
标准变量存贮器
5800 计算器支持使用从 A 到 Z 命名的 26 个变量。 在普通计算状态,可以按 STO 键把数字存贮到字母变 量中,按 RCL 又可将字母变量中存贮的数字调用出来。
标准变量存贮器
2
额外变量存贮器
SIO
fx-
580
0
计
算
器
的
的
统
计
与
回
归
计
算
CA
单变量统计计算示例
SIO
fx-
580
0
计
算
器
的
的
统
计
与
回
归
计
算
CA
单变量统计计算示例
SIO
fx-
测量程序设计 pdf

测量程序设计
测量程序设计是指根据测量任务和要求,制定测量方案,设计测量程序,以确保测量结果的准确性和可靠性。
以下是一些常见的测量程序设计步骤:
1.明确测量任务和要求:首先需要明确测量任务和要求,包括需要测量的物理量、测量精度、测量范围、测量方式等。
2.选择合适的测量仪器和传感器:根据测量任务和要求,选择合适的测量仪器和传感器,并确保其精度和可靠性符合要求。
3.设计测量方案:根据测量任务和要求,设计合理的测量方案,包括测量步骤、测量环境、测量参数等。
4.编写测量程序:根据测量方案,编写相应的测量程序,包括数据采集、数据处理、结果输出等。
5.测试和验证:在实际应用中,需要对测量程序进行测试和验证,以确保其准确性和可靠性。
6.优化和改进:根据测试和验证结果,对测量程序进行优化和改进,以提高其性能和效率。
总之,测量程序设计需要综合考虑测量任务和要求、测量仪器和传感器、测量方案、编程语言和工具等多种因素,以确保测量结果的准确性和可靠性。
测量程序集
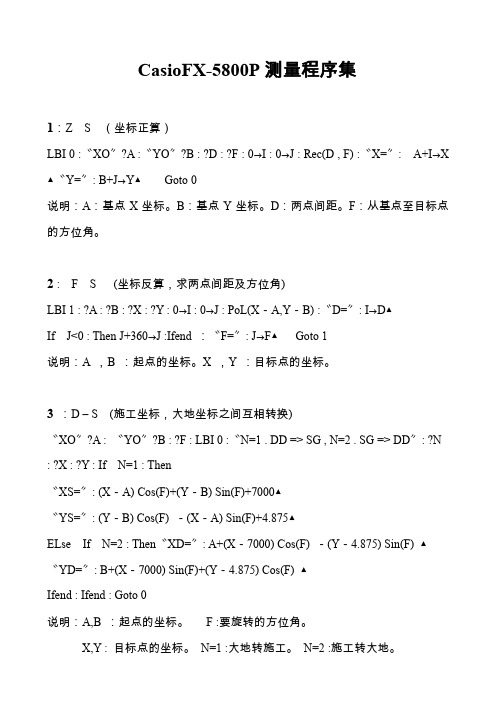
CasioFX-5800P测量程序集1:Z S (坐标正算)LBI 0 :〝XO〞?A :〝YO〞?B : ?D : ?F : 0→I : 0→J : Rec(D , F) :〝X=〞: A+I→X ▲〝Y=〞: B+J→Y▲Goto 0说明:A:基点X坐标。
B:基点Y坐标。
D:两点间距。
F:从基点至目标点的方位角。
2 : F S (坐标反算,求两点间距及方位角)LBI 1 : ?A : ?B : ?X : ?Y : 0→I : 0→J : PoL(X-A,Y-B) :〝D=〞: I→D▲If J<0 : Then J+360→J :Ifend :〝F=〞: J→F▲Goto 1说明:A ,B :起点的坐标。
X ,Y :目标点的坐标。
3:D – S (施工坐标,大地坐标之间互相转换)〝XO〞?A : 〝YO〞?B : ?F : LBI 0 :〝N=1 . DD => SG , N=2 . SG => DD〞: ?N : ?X : ?Y : If N=1 : Then〝XS=〞: (X-A) Cos(F)+(Y-B) Sin(F)+7000▲〝YS=〞: (Y-B) Cos(F) -(X-A) Sin(F)+4.875▲ELse If N=2 : Then〝XD=〞: A+(X-7000) Cos(F) -(Y-4.875) Sin(F) ▲〝YD=〞: B+(X-7000) Sin(F)+(Y-4.875) Cos(F) ▲Ifend : Ifend : Goto 0说明:A,B :起点的坐标。
F :要旋转的方位角。
4 : DMCX-MD ( 隧道断面程序)LBI 0 : ?X : ?Y : ?H : Prog〝GC〞: If H≥G+1.533 :Then Goto 1 : ELse If H≥G+0.13 And H < G+1.533 :Then Goto 2 : ELse If H≥G-0.64 And H < G+0.13 :Then Goto 3 : ELse If H < G-0.64 : Then Goto 4 : Ifend : Ifend :Ifend : IfendLBI 1 :〝YUAN 1〞: POL(H-G-1.533 , Y) -6.3▲Goto 0LBI 2 :〝YUAN 2〞: POL(H-G-1.533 , Y+2.5) -8.82▲G-H▲Goto 0LBI 3 :〝YUAN 3〞: POL(H-G-0.302 , Y-4.594) -1.62▲Goto 0LBI 4 :〝YANG GONG〞: POL(H-G-13.527 , Y) -15.62▲Goto 0说明:X , Y , H : 为掌子面上任意点坐标。
测量常用程序的编写
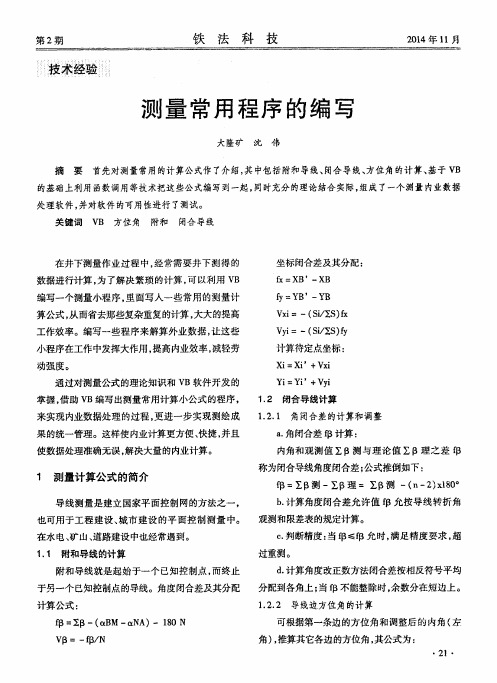
线, 与向量 2 , 1 所夹之角度。其 中 ‘ p 2 , 1 是‘ p 1 , 2的 后视方位角 , 亦称为反方位角 , 两者相差 1 8 0 .
‘ p 2, 1= ( P 1, 2+1 8 0.
式 中 B左 为改正后 的左角。当采用上式算得
的 值超 过 3 6 0 。 时, 应减 去 3 6 0 。 。 由最后 一边 的方 位角 推算 而得第 一 边 的方 位 角 , 其 值 应 等于 它 的起
Ⅲ
一 一
一 +
‘ p l , 2 =1 8 0 。 +0 ‘ p l , 2 =3 6 0 。 一0
d . 导线相对闭合差
Ⅳ
K=f / ∑D:1 /∑D / f =1 / N
e . 计算坐标增量改正值
B x i =一( f x / ∑D) D i B y i = 一( / ∑D ) D i
始值, 如不等表明计算有错误 。
1 . 2 . 3 坐标增量计算及坐标增量 闭合差的调整 a .坐标增量的计算 : 按坐标正算公式计算各边 的坐标增量 , 计算位数取到 c m 。其公式如下 :
A x i=D i c o s a i ( i +1 ) ,
图 l 正、 反方 位角
A y i = D i s i n e d ( i + 1 )( 其 中, i : 1 、 2 、 …n )
表 1 象 限角位
象限
I Ⅱ
式 中: & ——纵坐标增量闭合差 ; f y ——横坐标增量闭合差 c 。 导线全长闭合差的计算 :
f = 、 / ( f x 2+ f y 2 )
△ 】 【
+ +
△ y
+ 一
方
长度计量的一般测量程序

长度计量的一般测量程序下载提示:该文档是本店铺精心编制而成的,希望大家下载后,能够帮助大家解决实际问题。
文档下载后可定制修改,请根据实际需要进行调整和使用,谢谢!本店铺为大家提供各种类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by this editor. I hope that after you download it, it can help you solve practical problems. The document can be customized and modified after downloading, please adjust and use it according to actual needs, thank you! In addition, this shop provides you with various types of practical materials, such as educational essays, diary appreciation, sentence excerpts, ancient poems, classic articles, topic composition, work summary, word parsing, copy excerpts, other materials and so on, want to know different data formats and writing methods, please pay attention!长度是物体在某一方向上的距离,是一个物体或物理空间的基本属性。
测量系统分析程序

测量系统分析程序随着科技的发展,测量技术和仪器的应用越来越广泛。
在各种工业、制造业甚至是医疗设备和生活领域中,测量都起着很重要的作用。
为了能够准确地进行测量并得到有效的数据,分析测量系统的性能和精度就显得尤为重要。
因此,测量系统分析程序的开发和运用对于提高产品质量和生产效率都具有极大的意义。
测量系统分析程序是指用于评估测量系统性能的软件工具。
它能够帮助部门进行统计分析、精度评估、系统校准等工作。
对于企业来说,测量系统分析程序不但能检验产品的质量,而且还能节省时间和成本,提升工作效率。
现在市面上的测量系统分析程序众多,但其基本原理都是类似的。
它们主要基于因素分析模型或方差分析模型,对测量数据进行统计分析,得出各个因素对系统误差的影响程度。
这些因素包括仪器本身、环境因素、操作人员等。
再通过数学计算方法,确定这些因素对系统误差的贡献度,以确定改进措施并提高系统测量精度。
测量系统分析程序涉及的技术领域非常广泛。
其中包括:一、数据统计分析:通常采用因素分析或正交旋转因子分析等数据分析方法,以从大量数据中揭示变数间的内在关联,洞察测量模型中影响测量结果的主要因素和机制。
二、可靠度分析:对系统进行可靠度分析,考虑测量设备的多个方面,如可用性、维护性、生命周期成本等方面,以确定其性能和寿命,并提供改进建议。
三、质量分析:考虑测量设备的准确性、可重复性、灵敏度等质量问题,以确定设备的有效性和精度,并提供数据质量改进建议。
四、校准系统:对测量设备进行定期校准以确保其准确度,这是保障数据质量和有效性的一项重要措施。
以上技术领域是测量系统分析程序的关键部分。
除此之外,还有一些其他的技术领域,如数据预处理、机器学习、人工智能等。
这些新兴技术领域的应用将会不断优化测量系统分析程序的性能,更好地实现对系统误差的控制和分析。
在企业使用测量系统分析程序时,为了保证分析结果的准确性,还需要注意以下几点:一、采集数据的准确性:在测量时要规范操作流程,保证数据的准确性和完整性。
测量程序精度计算公式

测量程序精度计算公式在工程和科学领域中,测量是非常重要的一环。
无论是进行实验研究还是进行工程设计,都需要对各种物理量进行测量。
然而,任何测量都会存在一定的误差,因此需要对测量结果的精度进行评估。
本文将介绍测量程序精度的计算公式,帮助读者更好地理解测量精度的概念。
测量程序精度是指测量结果与真实值之间的偏差程度。
通常情况下,我们无法得知真实值,因此需要通过一系列的测量来对结果的精度进行评估。
测量程序精度的计算公式可以帮助我们对测量结果进行定量分析,从而更好地了解测量的可靠性和准确性。
测量程序精度的计算公式通常包括几个关键的参数,包括测量值的平均值、标准偏差、置信区间等。
下面将详细介绍这些参数及其计算方法。
首先是测量值的平均值。
测量值的平均值是所有测量结果的总和除以测量次数。
其计算公式如下:\[\bar{x} = \frac{1}{n}\sum_{i=1}^{n}x_i\]其中,\(\bar{x}\)表示测量值的平均值,\(n\)表示测量的次数,\(x_i\)表示第\(i\)次的测量结果。
其次是标准偏差。
标准偏差是衡量测量结果分散程度的指标,可以用来评估测量数据的离散程度。
其计算公式如下:\[s = \sqrt{\frac{1}{n-1}\sum_{i=1}^{n}(x_i-\bar{x})^2}\]其中,\(s\)表示标准偏差,\(n\)表示测量的次数,\(x_i\)表示第\(i\)次的测量结果,\(\bar{x}\)表示测量值的平均值。
最后是置信区间。
置信区间是用来估计测量值的真实范围的区间,可以帮助我们对测量结果的可靠性进行评估。
其计算公式如下:\[CI = \bar{x} \pm t\frac{s}{\sqrt{n}}\]其中,\(CI\)表示置信区间,\(\bar{x}\)表示测量值的平均值,\(t\)表示t分布的临界值,\(s\)表示标准偏差,\(n\)表示测量的次数。
通过以上的计算公式,我们可以对测量结果的精度进行评估。
测量常用程序

测量常用程序PROGRAM 1(坐标正算)L1 A:BL2 Lb1 1L3 {S,U}L4 X=A+Rec(S,U)◢Y=B+W◢L5 Goto 1PROGRAM 2(坐标反算)L1 A:BL2 Lbl 2L3 {X,Y}L4 S=Pol(A-X,B-Y)◢U=W+180◢L5 Goto 2PROGRAM 3(坐标系转化一)L1 C:D:UL2 Lb1 3L3 {A,B}L4 X=(A-C)CosU+(B-D)SinU◢Y= (A-C)SinU+(B-D)CosU◢L5 Goto3注:C,D为原点在旧坐标系中的坐标值,U为X轴在旧坐标系中的方位角。
PROGRAM 4(坐标系转化二)L1 C:D:UL2 Lbl 4L3 {X,Y}L4 A=C+X CosU-Y SinU◢B=D+X SinU+Y CosU◢L5 Goto 4注:同PROGRAM3, 为PROGRAM3的反算程序。
PROGRAM 5(圆曲线放样公式之一)L1 A:B:U:R:KL2 Lbl 5L3 {X,Y}L4 Pol(A-X,B-Y)L5 L=πR* Abs(W+180-U)/180+K◢ P=R-V◢L6 N=0 =>Goto 5L7 ≠>C=X+Rec(s,w+90+s*90/(πR)) ◢D=Y+w◢L8 Goto 5注:1.A,B为圆心坐标,U为圆心与切点连线的方位角,R为半径,K为切点的桩号。
2.U值一定要在0——360度之间。
3.L为计算所得的圆曲线上的前进桩号,P为左右桩号。
PROGRAM 6(圆曲线放线公式之二)L1 A:B:U:R:KL2 Lbl 6L3 {L,P}L4 Rec(R-P,U+(L-K) x 180/(πx R))L5 X=A+V◢Y=B+W◢L6 Goto 6注:同PROGRAM5,为PROGRAM5的反算程序。
PROGRAM 7(缓和曲线计算)L1 C:D:U:R:KL2 Lbl 6L3 {L}L4 A=L-L5/(40R2K2)B=±(L3/6RK-L7/336R3K3)L5 X=C+A CosU-B SinU◢Y=D+A SinU-B CosU◢L6 Goto 6注:C,D为切点坐标,U为切线方位角,R为圆曲线半径,K为一边缓和曲线总长。
测量程序设计(2009级)

课时安排
第一章:VB概述(4学时) 第二章:VB 程序设计基础(4学时) 第三章:VB程序设计(4学时) 第四章:VB常用控件(4学时) 第五章:界面设计(8学时) 第六章:图形操作(4学时) 第七章:数据库应用(4学时)
总学时32,上课16学时,上机16学时
第一章 VB概述
1.1 Visual Basic 6.0简介
2.0, 3.0, 4.0, 5.0, 6.0, (7.0)版本
5.0 ,6.0包含三种版本(学习版、专业版和企业版)
第一章 VB概述
二、Visual Basic的特点 (红绿灯)
具有基于对象的可视化设计工具 事件驱动的编程机制
传统的程序设计是由一个主程序和若干个过程及函数 组成,程序运行总是从主程序开始,由主程序调用子过 程和函数。 VB是通过“事件”(键盘或鼠标操作、系 统 消息、程序触发)来执行对象的操作。而不是由事先编 好的程序流程所控制。事件的发生顺序是由程序的使用 者灵活控制。
3.工具栏
• 可以迅速访问常用的菜单命令。主菜单下面 是标准工具栏,其他工具栏可以通过“视图
”菜单中的“工具栏”命令打开。 • 工具栏右边是数字显示区,包含两个部分:
左数字区显示的是对象的坐标位置,右数字
区显示的是对象的大小。
图标
名称与功能 添加标准EXE工程——用来添加新的工程到工程组中。单击其右边的箭头将弹出一个下拉 菜单,可从中选择需要添加的工程类型 添加窗体——用来添加新的窗体到工程中,单击其右边的箭头,将弹出一个下拉菜单,可 从中选择需要添加的窗体类型 菜单编辑器——显示菜单编辑器对话框
例2.1 在窗体Form1的单击事件中写入如下代码:
Private Sub Form_Click() a = 10: b = 3.14: c = 100 Print Print Print Print "a="; a; "b="; b "a="; a, "b="; b Tab(18); "a="; a, "b="; b Spc(18); "a="; a, "b="; b
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
-4707.998 -1168.426 <1/15000 日期: 合格
f=(fx +fy ) = 0.0717 T=f/ΣS= 1/70533
起点坐标 终点坐标 -4707.941 -1168.470 fx=ΣΔX-(X终-X始)= 0.057 fy=ΣΔY-(Y终-Y始)= -0.044 负责人: -0.057 0.044
2 2 0.5
4246777.250 4242069.252
473471.464 472303.038
473471.464,4246777.25 472303.038,4242069.252
LM19 G09
207 148
10 18
41.5 56.5
207.178194 148.315694
207°10′41″ 148°18′56″
0.7″ 0.7″
207°10′42″ 211°53′03″ 148°18′57″ 180°12′00″ 163.767
测站数n 打印时 隐藏 Σ 辅助 计算 2645 2652 2652 7 5
228°06′22″ 180°12′00″ 5055.890 fx=ΣΔX-(X终-X始)= fy=ΣΔY-(Y终-Y始)=
fβ=Σβ+α始-α终-n×180=
计算:
路
合同号:LM10 编 号:05-04
坐标增量计算值 Δx Δy 坐标增量改正值 Δx Δy 改正后的增量 Δx Δy X 平差后的坐标 Y 点号 J25 4246777.250 -414.971 -307.032 -409.171 -420.230 -22.269 -395.480 -313.033 -499.906 -542.253 -377.011 -426.523 -217.073 -223.931 -201.591 -14.665 -124.096 -207.615 136.206 -117.138 -54.539 -174.395 -115.021 -141.296 -58.594 9.209 -18.433 -0.0052 -0.0034 -0.0048 -0.0052 -0.0015 -0.0046 -0.0036 -0.0059 -0.0062 -0.0045 -0.0048 -0.0024 -0.0025 0.0040 0.0027 0.0037 0.0041 0.0012 0.0036 0.0028 0.0046 0.0048 0.0035 0.0037 0.0019 0.0020 -414.976 -307.035 -409.175 -420.236 -22.271 -395.485 -313.037 -499.912 -542.259 -377.016 -426.528 -217.075 -223.933 -201.587 4246362.274 -14.662 4246055.238 -124.092 4245646.063 -207.611 4245225.827 136.208 4245203.556 -117.134 4244808.071 -54.536 4244495.034 -174.390 4243995.123 -115.017 4243452.863 -141.293 4243075.848 -58.591 4242649.320 9.211 4242432.245 -18.431 4242208.311 472389.539 LM19 472407.970 LM18 472398.759 LM17 472457.349 LM16 472598.642 LM15 472713.659 LM14 472888.049 BO1 472942.585 J29 473059.719 J28 472923.512 LM13 473131.122 C10 473255.215 J26 473269.877 LM12 473471.464 A249
打印时隐藏 41பைடு நூலகம் 447.5 7 27.5 2652.09097
15 起点方位角 2652°05′27″ 2652°05′28″ 10″ 终点方位角 2652°05′38″ -10″ ±39″ 复核: fβ容=±10n =
0.5
228 180
6 11
22.21 59.96
228.106169 180.199989
大广公路固安(京冀界)至深州段高速公路
导线测量平差计算表
方向角 方向角 α 22.21 228.106169 228°06′22″ 205°54′37″
承包单位:中交第二航务工程局有限公司 监理单位:河北通达工程监理咨询有限公司
点号 J25 A249 LM12 J26 C10 LM13 J28 J29 BO1 LM14 LM15 LM16 LM17 LM18 LM19 157 156 194 189 72 277 173 189 172 188 167 169 187 207 48 49 8 25 59 12 23 20 44 34 16 44 8 10 14.0 27.0 13.5 10.5 37.5 47.0 3.5 53.0 39.0 8.0 37.0 54.0 5.5 41.5 157.803889 156.824167 194.137083 189.419583 72.99375 277.213056 173.384306 189.348056 172.744167 188.568889 167.276944 169.748333 187.134861 207.178194 157°48′14″ 156°49′27″ 194°08′13″ 189°25′10″ 72°59′38″ 277°12′47″ 173°23′03″ 189°20′53″ 172°44′39″ 188°34′08″ 167°16′37″ 169°44′54″ 187°08′06″ 207°10′41″ 0.7″ 0.7″ 0.7″ 0.7″ 0.7″ 0.7″ 0.7″ 0.7″ 0.7″ 0.7″ 0.7″ 0.7″ 0.7″ 0.7″ 157°48′15″ 461.346 307.382 427.575 468.719 138.015 412.463 317.749 529.452 554.318 402.619 430.529 217.268 224.688 156°49′28″ 打印时隐藏 194°08′14″ 196°52′19″ 189°25′11″ 206°17′30″ 72°59′38″ 99°17′08″ 277°12′48″ 196°29′56″ 173°23′04″ 189°53′00″ 189°20′54″ 199°13′54″ 172°44′40″ 191°58′33″ 188°34′09″ 200°32′42″ 167°16′38″ 187°49′20″ 169°44′55″ 177°34′14″ 187°08′06″ 184°42′21″ 207°10′42″ 182°44′05″ 观测值 (左角) ° ′ ″ 观测值 转角值(左角) 改正值 改正后值 228 6 边长(m) s α
4242208.311 -139.058 -86.502 -0.0018 0.0014 -139.059 -86.501 4242069.252
472389.539 472303.038
LM19 G09
472389.53875966,4242208.31138195 472303.038,4242069.252
473471.464,4246777.25 473269.87703318,4246362.27350609 473255.214595864,4246055.23810076 473131.122145321,4245646.06279001 472923.511574991,4245225.82706499 473059.719273445,4245203.55602324 472942.58507792,4244808.07136472 472888.048610902,4244495.03442664 472713.658583182,4243995.12258161 472598.641977136,4243452.86319642 472457.349111107,4243075.84755899 472398.758504178,4242649.31968159 472407.969759744,4242432.24451771 472389.53875966,4242208.31138195