磁盘驱动读取系统的分析设计
磁盘驱动调度算法
磁盘驱动调度算法磁盘驱动调度算法是操作系统中的一种重要机制,用于决定磁盘上的数据访问顺序,提高磁盘的读写效率。
在计算机系统中,磁盘是一种主要的存储介质,而磁盘驱动调度算法则是决定计算机系统如何合理地利用磁盘资源的关键。
磁盘驱动调度算法的目标是通过合理地安排磁盘上的数据访问顺序,最大限度地提高磁盘的读写效率。
在实际应用中,磁盘上的数据往往是分散存储的,即不同的文件、目录等数据被存储在不同的磁盘块中。
因此,当系统需要读取或写入某个文件时,需要将磁头移动到相应的磁道上,然后再进行数据的读取或写入操作。
而磁盘驱动调度算法的任务就是决定磁头的移动顺序,从而提高磁盘的访问效率。
常见的磁盘驱动调度算法有先来先服务(FCFS)、最短寻道时间优先(SSTF)、电梯调度算法(SCAN)、循环扫描算法(C-SCAN)等。
下面将逐一介绍这些算法的特点和应用场景。
1. 先来先服务(FCFS)算法:该算法按照磁盘请求的先后顺序进行调度,即先到达磁盘的请求先被服务。
这种算法简单直接,但由于没有考虑磁盘的物理结构和磁头的移动距离等因素,可能会导致磁盘的平均寻道时间较长。
2. 最短寻道时间优先(SSTF)算法:该算法会选择离当前磁道最近的请求进行服务,从而减少磁头的移动距离,提高磁盘的读写效率。
然而,这种算法可能会出现饥饿现象,即某些请求长时间得不到服务。
3. 电梯调度算法(SCAN):该算法模拟了电梯的运行过程,磁头按照一个方向移动,直到到达磁盘的边界,然后改变方向继续移动。
这种算法能够有效地减少磁头的移动次数,提高磁盘的读写效率。
但由于磁头只能按照一个方向移动,可能会导致某些请求长时间得不到服务。
4. 循环扫描算法(C-SCAN):该算法是电梯调度算法的一种改进,磁头按照一个方向移动,直到到达磁盘的边界,然后立即返回到起始位置,继续移动。
这种算法能够有效地减少磁头的移动距离,提高磁盘的读写效率。
不同的磁盘驱动调度算法适用于不同的应用场景。
自动控制原理实验报告

一、结构图简化方法(梅森公式)举例说明用Matlab如何实现例1:书本P653,例C-1 已知多回路反馈系统的结构图如图所示,求闭环系统的传递函数() ()C sR s。
图-1Matlab的M文件为:%%%%%%%%%%%%%%%%G1=tf([1],[1 10]);G2=tf([1],[1 1]);G3=tf([1 0 1],[1 4 4]);numg4=[1 1];deng4=[1 6];G4=tf(numg4,deng4);H1=zpk([-1],[-2],1);numh2=[2];denh2=[1];H3=1;nh2=conv(numh2,deng4);dh2=conv(denh2,numg4);H2=tf(nh2,dh2);sys1=series(G3,G4);sys2=feedback(sys1,H1,+1);sys3=series(G2,sys2);sys4=feedback(sys3,H2);sys5=series(G1,sys4);sys=feedback(sys5,H3)%%%%%%%%%%%%%%%%在Matlab中M文件运行后的执行结果为:Zero/pole/gain:0.083333 (s+1) (s+2) (s^2+ 1)----------------------------------------------------------------------(s+10.12) (s+2.44) (s+2.349) (s^2+ 1.176s + 1.023)二、系统时域分析与设计方法(动态、稳态性能)1) 改变零点与极点位置对系统模态、动态性能、稳态性能的影响。
极点确定系统的运动模态,和稳定性。
零点决定模态在输出中的比例关系。
例2:设系统闭环传递函数为Φ(s)=26s+3)22s ++(ζs ,其中,ζ=0.707。
求二阶系统的单位阶跃响应。
执行M 文件: close all;clear all;num=[6 18];den=[1 2*0.707 2]; H=tf(num,den); sys=tf(num,den); p=roots(den) t=0:0.05:10; figure(1)step(sys,t);gridxlabel('t');ylabel('c(t)');title('单位阶跃响应'); 则,系统的单位阶跃响应为:图-2闭环极点为p= -0.7070+1.2248i -0.7070-1.2248i设具有相同极点但零点不同的传递函数为:Φ1(s)=26s+3)(1)22s s +++(ζs 增加的一个零点为s= - 1求其单位阶跃响应 M 文件为:%%%%%%%%%%%%%%% close all;clear all;clcnum=[6 24 18];den=[1 2*0.707 2]; H=tf(num,den); sys=tf(num,den); p=roots(den) t=0:0.05:10; figure(1)step(sys,t);gridxlabel('t');ylabel('c(t)');title('单位系统阶跃响应'); %%%%%%%%%%%%%%%如下图所示为Φ1(s)的单位阶跃响应:图-3由此可知:①、改变闭环传递函数的零点位置会影响系统的动态性能,当加了零点后,超调量变大,上升时间变短。
应用型人才培养的“自动控制原理”教学改革
应用型人才培养的“自动控制原理”教学改革作者:李占英张明君于晓海梅彦平来源:《中国电力教育》2013年第07期摘要:将实际案例引入教学体系中,每个重要知识点均与实际应用结合起来。
在“自动控制原理”课程中,引入“磁盘驱动读取系统”这一实例,并贯穿全书内容,采用循序渐进的方法进行案例教学,激发学生学习兴趣和积极性,理论联系实际,加深对知识的整理理解与分步应用的能力。
关键词:应用型人才;自动控制原理;案例教学;独立学院作者简介:李占英(1979-),女,吉林德惠人,大连理工大学城市学院,副教授;张明君(1966-),女,河北滦县人,大连理工大学城市学院,教授。
(辽宁大连 116600)基金项目:本文系2012-2013年大连理工大学城市学院教学改革与研究项目(项目编号:JXYJ2012004)的部分研究成果。
中图分类号:G642.0 文献标识码:A 文章编号:1007-0079(2013)07-0082-022010年6月,教育部在高校开展了“卓越工程师教育培养计划”后,高等教育也逐步由重视研究型教育向应用型教育转变,特别强调培养现场工程师、设计开发工程师和研究型工程师等多种类型的工程师后备人才,因此校企合作进入了一个新的发展阶段。
随着高校各项教改的进行,各高校针对专业基础课也进行了大力度的教学研究与改革。
由于“自动控制原理”是自动化类专业的核心课程和重要的专业基础课,因此许多高校都大力度投入建设,[1,2]但由于本课程原理性强,一般重点高校都从研究型人才培养入手改革,着重在理论上进行创新。
独立院校针对学情从应用型人才培养入手进行课程改革,如简化数学、案例教学、增加Matlab仿真等设计,但目前一般的教学只是在每个知识点讲解应用时选取独立的工程案例。
由于系统知识广泛,这样学生即吃不透这个案例,也不能对自动控制有整体的理解,教学效果不是很好。
基于这点出发,从实际工程出发,进行课程教学改革,设计能贯穿本课程始终的工程案例,使学生即能掌握每个知识点,又能在每个知识点间建立联系,使学生明确工程设计的具体思想,提高学习兴趣和动手能力。
磁盘驱动调度算法
操作系统课程设计题目:磁盘驱动调度算法模拟班级:姓名:学号:指导教师:成绩:6 月磁盘驱动调度算法模拟菜单显示FCFS算法SCAN算法SSTF算法CSCAN算法沿磁道增加方向沿磁道减小方向沿磁道增加方向沿磁道减小方向一、课程设计目的1.进一步加深对磁盘驱动调度算法的理解。
2.编程实现“先来先服务”、“最短寻道时间优先”、“电梯调度”、“循环扫描”算法。
二、课题内容1.假设一种磁盘含有4 个盘片,每个盘片有100 个磁道,每道有8 个扇区,模拟格式化时对柱面和扇区进行编号的过程。
2.设计若干磁道访问请求,规定顾客输入线性块号,系统能将其转换为对应的磁道号(柱面号),并计算出分别采用“先来先服务”、“最短寻道时间优先”、“电梯调度”、“循环扫描”算法的寻道总长度。
3.提供可视化且简洁清晰的顾客界面,能直观且动态地描述磁头移动。
三、设计思路(一)系统概要设计1.整体模块设计图2.有关知识磁盘调度:当有多个进程都请求访问磁盘时,采用一种合适的驱动调度算法,使各进程对磁盘的平均访问(重要是寻道)时间最小。
现在惯用的磁盘调度算法有:1)先来先服务2)最短寻道时间优先3)扫描算法4)循环扫描算法等3.算法思想介绍(1)先来先服务算法(FCFS)即先来的请求先被响应。
FCFS 方略看起来似乎是相称"公平"的,但是当请求的频率过高的时候FCFS 方略的响应时间就会大大延长。
FCFS 方略为我们建立起一种随机访问机制的模型,但是如果用这个方略重复响应从里到外的请求,那么将会消耗大量的时间。
为了尽量减少寻道时间,看来我们需要对等待着的请求进行合适的排序,而不是简朴的使用FCFS 方略。
这个过程就叫做磁盘调度管理。
有时候FCFS 也被看作是最简朴的磁盘调度算法。
(2)最短寻道时间优先算法(SSTF)最短时间优先算法选择这样的进程。
规定访问的磁道,与现在磁头所在的磁道距离近来,以使每次的寻道时间最短。
(电气)自动控制原理16(复数域分析)

步骤 2
按照G1(s)H1(s)的零、极点去绘制以a为 参变量的根轨迹。
《自动控制原理》
第四章 控制系统的复数域分析
二、正反馈系统的根轨迹
系统的闭环传递函数为:
R(s)
G (s ) H (s )
Y(s)
Y ( s) G( s ) T ( s) = = R( s ) 1 − G( s ) H ( s )
第四章 控制系统的复数域分析
Gc ( s ) = K p + K D s
放大器 E a (s )
40
-
5000 s + 1000
Td (s )
电机
5
-
R (s )
负载 0.05 s(0.05s + 1)
Y (s )
磁头支撑臂和簧片非常轻,且簧片由弹簧钢制成 弹性支架 控制器部分: 放大器(比例控制器) 比例积分控制器
P .O . = 4.3%
Ts ( 2%) = 400ms
系统的单位干扰响应: y d max ( t ) = − 5.2 × 10 −3
表5.9 瞬态响应的性能指标设计要求(P274)
性能指标
超调量 调节时间 对单位阶跃干扰的最大响应值
预 期 值
小于5% 小于250ms 小于5×10-3
不满足要求。
S-Plane
jω
j4 j3.16
s( s + 4)(s2 + 4s + 20) + K = 0
45
s′ =s+2
[(s′)2 - 4][(s′)2 + 16] + K = 0
σ
-6
-4
-2
0
de g
单闭环磁盘驱动读取系统性能分析与参数设计
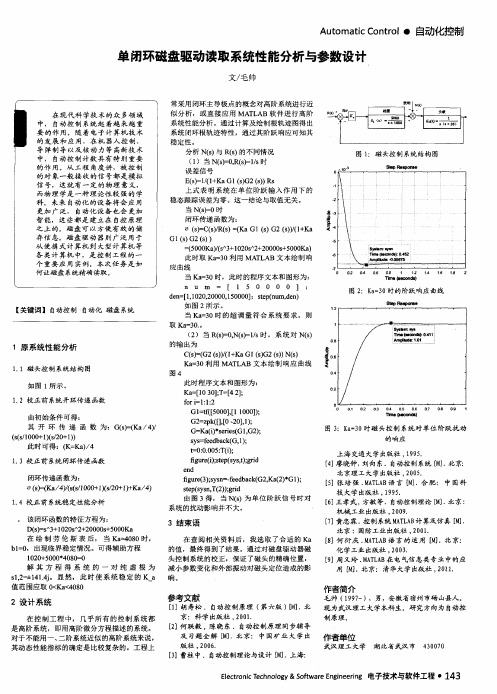
如图 1 所示 。 1 . 2 校 正 前 系统 开环 传 递 函 数
此时程序文本和 图形为 : Ka = [ 1 0 3 0 1 ; T = [ 4 2 1 ;
f o ri =l : 1 : 2
由初始条件 可得 : 其 开 环 传 递 函 数 为:G( s ) = ( Ka / 4 ) / ( s ( s / 1 0 0 0 +1 ) ( s / 2 0 + 1 ) ) 此时可得 :( K = Ka ) / 4 1 . 3校正前 系统 闭环传递 函数 闭环传递 函数为 : 0( s ) = ( Ka / 4 ) / ( s ( s / 1 0 0 0 + 1 ) ( s / 2 0 +1 ) + Ka / 4 ) 1 . 4校 正前 系统稳定性 能分析
e n d
图3 :K a = 3 0 时磁 头控制 系统对单 位 阶跃 扰动
的 响 应
f i g u r e ( 3 ) ; s y s n  ̄f e e d b a c k ( G 2 , Ka ( 2 ) G1 ) ; s t e p ( s y s n , T ( 2 ) ) ; g r i d 由 图 3得 ,当 N( s )为单 位阶 跃信 号时对 系统的扰 动影 响并不大。
.
Gl = t f ( [ 5 0 0 0 ] , [ 1 1 0 0 0 ] ) ; G 2 = z p k ( [ 】 , [ 0- 2 0 1 , 1 ) ; G = Ka ( i ) s e r i e s ( G1 , G 2 ) ; s y s = f e e d b a c k ( G, 1 ) ; t = 0 : 0 . 0 0 5 : T ( i ) ; i f g u r e ( i ) ; s t e p ( s y s , d
lisha 自控 控制系统时域分析实例PPT课件

燃气热水器的水温控制 控制指标:响应快,调整时间短
燃气热水器的水温控制
• 数学模型
燃气热水器的水温控制
• 响应曲线
英吉利海峡海底隧道钻机
• 钻机分别从海峡两端向中间推进,并在海峡的中间对接。为了使对接达到必要的精度,施工时使用了一个 激光导引系统以保证钻机的直线方向。
英吉利海峡海底隧道钻机
• 钻机的数学模型如下:
预期 角度 R(s) E(s)
磁盘驱动器
磁盘驱动器
• 硬盘(hard disk)即硬盘驱动器 • 硬盘是计算机中唯一一个精密机械和电子电路混合的器件
• 大多数都采用温切斯特技术而被称之为“温切斯特硬盘”,简称“温盘”。这种技术是由IBM公司位 于美国加州坎贝尔市温切斯特大街的研究所研制的
磁盘驱动器
• 温切斯特硬盘都有如下的技术特点
1
1.2 1.4 1.6 1.8
2
Time (sec) (sec)
结论:Ka=30时,干扰大;Ka=80时,干扰小
磁盘驱动读取系统 (2)
性能指标 超调量 调节时间 对单位阶跃干扰的最大响应值
电机线圈
G1 ( s)
s
5000 1000
干扰
Td(s)
+
负载
G2 (s)
s(s
1
20)
o (s)
-3
x 10 0
传感器
H(s)=1
Step Response
磁盘管理课程设计

磁盘管理课程设计一、课程目标知识目标:1. 学生能够理解磁盘的基本概念,包括磁盘的种类、结构及工作原理;2. 学生能够掌握磁盘分区的原则和方法,了解不同文件系统的特点;3. 学生能够了解磁盘碎片的概念,掌握磁盘整理和优化的基本方法;4. 学生能够掌握磁盘备份与恢复的原理,了解常见的数据保护方法。
技能目标:1. 学生能够运用磁盘管理工具进行分区、格式化、分配盘符等操作;2. 学生能够独立进行磁盘清理、整理、优化,提高计算机运行效率;3. 学生能够使用备份工具对数据进行备份和恢复,确保数据安全;4. 学生能够分析磁盘管理中遇到的问题,并提出合理的解决方案。
情感态度价值观目标:1. 学生通过学习磁盘管理,培养对计算机硬件和软件的敬畏之心,增强维护计算机安全的意识;2. 学生能够养成定期进行磁盘整理和备份的良好习惯,提高个人信息素养;3. 学生在团队协作中,能够主动分享磁盘管理技巧,培养团结互助的品质;4. 学生在学习过程中,培养解决问题的能力,增强自信心和自主学习的意识。
本课程针对初中年级学生设计,结合学生的年龄特点,注重理论与实践相结合。
课程内容紧密联系课本,确保学生在掌握基本理论知识的同时,能够实际操作,提高实践能力。
通过本课程的学习,使学生能够更好地管理和维护计算机磁盘,提高计算机使用效率,培养良好的信息素养。
二、教学内容1. 磁盘的基本概念- 磁盘的种类与结构- 磁盘的工作原理与性能指标2. 磁盘分区与文件系统- 磁盘分区的原则与方法- 常见文件系统类型及特点- 分区格式化与分配盘符3. 磁盘整理与优化- 磁盘碎片的概念与产生原因- 磁盘整理的操作步骤与方法- 磁盘优化的技巧与策略4. 磁盘备份与恢复- 数据备份的重要性与原则- 常见备份类型与工具- 数据恢复的方法与技巧5. 磁盘管理工具的使用- 磁盘管理工具的介绍与功能- 实际操作演示与练习- 常见问题分析与解决教学内容依据课程目标进行选择和组织,注重科学性和系统性。
磁盘驱动读取系统

磁盘驱动读取系统这个设计实例将在本教材的各章中循序渐进的加以讨论。
按照图1所示的设计流程,各章都将讨论该章所能完成的设计步骤。
例如在第一章中,我们将完成设计步骤1、2、3、4,即:(1)确立控制目标,(2)确定控制变量,(3)初步确定各变量的初始设计指标,(4)初步确定系统结构。
若性能不能满足规范要求,则重新确定系统结构和选择执行机构图1控制系统设计过程磁盘可以方便有效的储存信息。
磁盘驱动器则广泛用于从便携式计算机到大型计算机等各类计算机中。
考察图2所示的磁盘驱动器结构示意图可以发现,磁盘驱动器读取装置的目标是要将磁头准确定位,以便正确读取磁盘磁道上的信息(第一步)。
要精确控制的变量是磁头(安装在一个滑动簧片上)的位置(第2步)。
磁盘旋转速度在1800转/分和7200转/分之间,磁头在磁盘上方不到100nm(第3步);如有可能,我们还要进的地方“飞行”,位置精度指标初步定为1m一步做到使磁头由磁道a移动到磁道b的时间小于50ms。
至此,我们可以给出图3所示的初步的系统结构,该闭环系统利用电机驱动磁头臂到达预期的位置。
磁道图2 磁盘驱动器结构示意图图3 磁盘驱动器磁头的闭环控制系统在上述内容中,我们指出了磁盘驱动系统的基本设计目标:尽可能将磁头准确定位在指定的磁道上,并且使磁头从1个磁道转移到另一个磁道所花的时间不超过10ms 。
现在,我们将完成设计流程(图1)的第4、5步。
首先应选定执行机构、传感器和控制器(第4步),然后建立控制对象和传感器等元部件的模型。
磁盘驱动读取系统采用永磁直流电机驱动读取手臂的转动(见图2)。
磁头安装在一个与手臂相连的簧片上,它读取磁盘上各点处不同的磁通量并将信号提供给放大器,簧片(弹性金属制成)保证磁头以小于100nm 的间隙悬浮于磁盘之上(见图4)。
图5a 中的偏差信号是在磁头读取磁盘上预先录制的索引磁道时产生的。
如图5b 所示,我们假定磁头足够精确,传感器环节的传递函数为()1H s =;作为足够精确的近似,我们用图6给出的电枢控制直流电机模型(0b K =)来对永磁直流电机建模;此外,图中也给出了线性放大器的模型;而且我们还假定簧片是完全刚性的,不会出现明显的弯曲。
Windows 10操作系统实验室项目技术要求

Windows 10操作系统实验室项目技术要求
要求使用私有云提供系统服务和资源上下载,采用手机、计算机终端设备等作为资料浏览与实验终端。
在网络正常的情况下,10000人同时使用时能够保证平台的运行流畅。
3.要求学生使用流程图如下:
3.1 登录私有云;
4. 3.2 下载实验资源;
3.3 正常进行实验讲义要求的步骤与环节。
4.云平台需要至少提供以下功能:
4.1 云实验教学平台要求的功能如下:
学期添加、学期修改、学期删除、课程绑定添加、课程绑定修改、课程绑定删除、课程绑定查询、授课计划添加、授课计划删除、授课计划查询管理、用户组管理、用户组添加、用户组删除、用户添加、用户删除、用户修改、用户批量导入、教师权限设置、教师附件授权权限设置、教师作业收发成绩维护权限设置、教师考试创建成绩维护权限设置、教师课程创建发布权限设置、学生权限设置、学生作业提交权限设置、全局权限设置、全局代私有附件权限设置、全局公共附件权限设置、课程分类添加、课程分类删除、课程分类修改、课程分类排序、课程状态修改、课程添加、课程维护所有者分配、课程删除、课程排序、课程可见范围(所有人可见,教师可见,学生可见,所有人不可见)。
4.2 课程教学系列要求如下:
全部课程列表、学习书签、文档浏览、公共附件、私有附件、在线视频播放;教师授课安排(按学期)、教师创建课程、课程状态调整、课程基础信。
自动控制原理磁盘读取系统

的变量是安装在滑动簧片上的磁头位置。
硬盘驱动读写系统初步控制方案
系统设计要求为:单位阶跃响应超调量 % 5%
单位阶跃响应调节时间 ts 50ms( 2%) 单位阶跃扰动作用下的最大响应 5.2103
二、系统数学模型的建立
1、系统三阶模型的建立 暂时不考虑扰动的影响,假定簧片是完全刚性的,不会出现明显弯
5000
V (s) s(s 20)(s 1000 )
当考虑干扰影响时,系统框图如下:
磁盘驱动读写系统三阶模型框图
2、系统近似二阶模型的建立
三阶模型还可以写为 G(s) Km / fR
s(TLs 1)(Ts 1)
,其中
TL J / f
50ms
T L / R 1ms。由于 T TL ,
(1)电枢回路电压平衡方程:
v(t
)
L
dia (t dt
)
R.ia
(t
)
Ea
(2)电动机轴上的转矩平衡方程: J
dwm (t) dt
f
wm (t) M m (t) M c (t)
(3)电量与机械量联系方程: Ea Ce wm
M m K mia (t)
在空载情况下,并考虑 Ce 0,则有
1、当 Ns ,0 R(s) 1 s 时:
开环传递函数
Wk
(s)
KaG(s)
5Ka s(s 20)
闭环传递函数
(s)
C(s) R(s)
s2
5K a 20s
5K a
输入信号作用下: (1)稳定性分析;
(2) 和 n确定;
, 分 (3)动态性能分析; 析 (4)稳态性能分析。 过 程
干扰信号作用下:(1)动态性能分析。
驱动盘工作原理

驱动盘工作原理驱动盘是计算机硬件设备中的一种,它的作用是连接操作系统与硬件设备之间的桥梁。
在计算机系统中,操作系统通过驱动盘来控制硬件设备的工作。
驱动盘中包含了相应硬件设备的驱动程序,使操作系统能够正确地识别和操作硬件设备。
驱动盘的工作原理是通过驱动程序与操作系统进行通信。
驱动程序是一段软件代码,它包含了与硬件设备通信所需的指令和协议。
当操作系统需要访问硬件设备时,它会发送相应的请求给驱动程序。
驱动程序根据操作系统的请求,向硬件设备发送指令,控制硬件设备的工作。
硬件设备将执行相应的指令,并将结果返回给驱动程序,再由驱动程序传递给操作系统。
驱动盘的工作原理可以简单概括为以下几个步骤:1. 安装驱动盘:在使用硬件设备之前,需要先安装相应的驱动盘。
驱动盘中包含了与硬件设备相匹配的驱动程序。
2. 操作系统识别硬件设备:当计算机系统启动时,操作系统会扫描系统中的硬件设备,并加载相应的驱动程序。
驱动程序与硬件设备的匹配可以通过设备的硬件标识符实现。
3. 发送指令与接收数据:当操作系统需要与硬件设备进行通信时,它会向驱动程序发送相应的请求。
驱动程序会将请求转化为与硬件设备通信的指令,并向硬件设备发送。
硬件设备执行指令,并将结果返回给驱动程序。
4. 数据传递给操作系统:驱动程序接收到硬件设备的结果后,会将数据传递给操作系统。
操作系统根据数据进行相应的处理,完成对硬件设备的控制。
总而言之,驱动盘通过驱动程序与操作系统进行通信,实现对硬件设备的控制与管理。
它起到了连接操作系统与硬件设备之间的桥梁作用,确保计算机系统能够正确地使用和操作硬件设备。
现代控制理论教学中的案例教学法楼

3 实施过分析
3.1 实际案例一:汽车巡行控制
这里以分析“汽车巡行控制”系统的控制器设计和状态
观测器分析为例,介绍案例教学法的实施过程。图 1 所示为
汽车的巡行控制模型。为简单起见,设车轮的转动惯量可以
忽略不计,并假设阻碍汽车运动的阻力和车子的速度成正
比,这样汽车模型可以近似地做些简化,如图 2 的受力分析
在讲解新知识点状态反馈控制器设计时,需要说明设 计过程分四个步骤:
(1)判断能控性:因为该系统状态方程为能控标准型, 所以系统一定能控。当然,也可以通过所学的秩判据来判
断,即建立能控性矩阵 因为 rank(S)=2 满秩,所以系统状态完全能控。
作者简介:楼旭阳(1982—),男,副教授,博士,主要研究方向为复杂系统控制理论与应用。
Case Teaching Method in the Course of Modern Control Theory // Lou Xuyang Abstract Case teaching method is a practical and effective teaching method. On the basis of case teaching method and combined with the problems in the teaching of modern control theory, this paper discusses the application of case teaching method in modern control theory teaching and the effect with two practical cases. Key words case teaching method;modern control;teaching method
单闭环磁盘驱动读取系统性能分析与参数设计
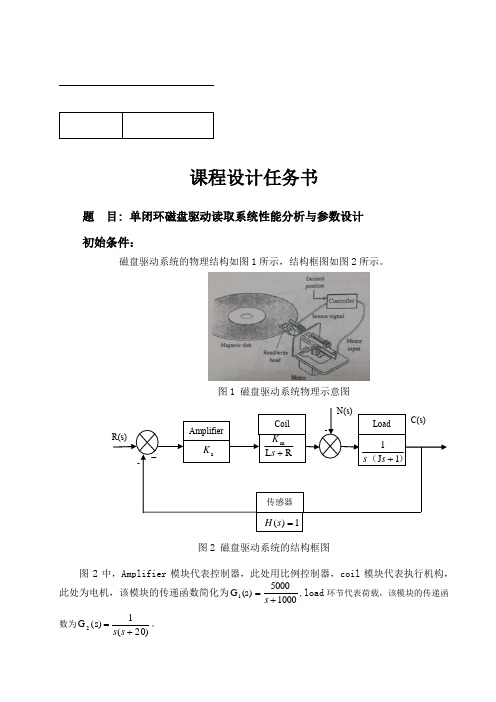
课程设计任务书题 目: 单闭环磁盘驱动读取系统性能分析与参数设计 初始条件:磁盘驱动系统的物理结构如图1所示,结构框图如图2所示。
图1 磁盘驱动系统物理示意图图2 磁盘驱动系统的结构框图图2中,Amplifier 模块代表控制器,此处用比例控制器,coil 模块代表执行机构,此处为电机,该模块的传递函数简化为10005000(s)G 1+=s ,load 环节代表荷载,该模块的传递函数为)20(1(s)G 2+=s s 。
要求完成的主要任务:(包括课程设计工作量及其技术要求,以及说明书撰写等具体要求)(1)求出系统的开环传递函数和闭环传递函数,分析系统的稳定性,如果系统稳定,求系统的稳态误差;(2)分析磁盘驱动系统输出单调上升时,放大环节的放大系数Ka的变化范围,并用Matlab画出其根轨迹;(3)分析Ka变化对系统动态性能指标的影响,并进行计算;(4)设计系统在单位阶跃信号作用下超调小于4.3%时的Ka值,计算对应的其它动态性能指标;分析系统的频域性能指标;(5)分析系统是否能跟踪单位斜坡输入和单位加速度输入;(6)分析干扰信号N(s)为单位阶跃信号时,对系统性能的影响;(7)对上述任务写出完整的课程设计说明书,说明书中必须写清楚分析计算的过程,并包含Matlab源程序或Simulink仿真模型,说明书的格式按照教务处标准书写。
时间安排:指导教师签名:年月日系主任(或责任教师)签名:年月日摘要 (I)单闭环磁盘驱动读取系统性能分析与参数设计 (1)1设计的目的及意义 (1)1.1设计目的 (1)1.2设计意义 (1)2原系统性能分析 (2)2.1磁头控制系统结构图 (2)2.2校正前系统开环传递函数 (2)2.3校正前系统闭环传递函数 (2)2.4校正前系统稳定性能分析 (2)3设计系统 (4)3.1设计系统思路 (4)3.2设计步骤 (4)3.2.1系统动态性能的分析思路 (4)3.2.2分析N(s)与R(s)的不同情况 (4)3.2.3系统的频域性能指标.............................................................. 错误!未定义书签。
磁盘驱动读取系统

的地方“飞行”,位置精度指标初步定为 1 m (第 3 步);如有可能,我们还要进
一步做到使磁头由磁道 a 移动到磁道 b 的时间小于 50ms。至此,我们可以给出 图 3 所示的初步的系统结构,该闭环系统利用电机驱动磁头臂到达预期的位置。
转轴
磁头滑片
臂的转动
支撑臂
磁道 a 磁道 b 图 2 磁盘驱动器结构示意图
1.2 1.4 1.6 1.8
2
Time(sec)
(b) Ka=80 时的阶跃响应曲线
图 11 闭环系统
现在我们来研究调整 K a 时系统的瞬态响应特性。 D( s) 0 时的闭环传递函数为:
T (s)
Y( s) K aG1( s)G2 (s) R( s) 1 K aG1 (s)G2 (s)
5000K a s3 1020 s2 20000 s 5000K a
确定控制目标
确定控制变量
若性能不能 满足规范要
求,则重新 确定系统结 构和选择执
行机构
给定各变量控制要求(设计指标) 确定系统结构,选择执行机构
建立对象、执行机构和传感器模型 建立控制器模型,选择关键待调参数
优化系统参数,分析系统性能
若性能满足规范要求,则设计工作结束
图 1 控制系统设计过程
磁盘可以方便有效的储存信息。 磁盘驱动器则广泛用于从便携式计算机到大
1.4
1.2
Ka=60
1
0.8 y(t)
0.6
Ka=30
0.4
0.2
0
0
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
1
Time(sec)
图 15 K a 分别为 30 和 60。系统对单位阶跃输入的响应, r (t) 1 , t 0
磁盘驱动读取系统

图2:磁头安装结构图
精选课件
图3:磁盘驱动读取系统框图模型
精选课件
模型仿真:
将图3具体化得到:
带入典型参数,使用simulink仿真,建立系统如下:
仿真结果与分析:
点击返回
精选课件
精选课件
P176 、4.10:
图4:模型改进框图一
Simulink仿真系统如下:
精选课件
仿真结果及分析:
精选课件
干扰信号对系统的影响:
Simulink仿真 系统框图如右图所示:
结果如下:
精选课件
P232、5.13
精选课件
精选课件
仿真结果分析:
Ka=60时,超调量和调节时间 都不满足要求 Ka=30时,超调量满足,调节 时间不满足要求
Ka=60时,对单位阶跃干扰的 最大响应值满足要求
Ka=30时,对单位阶跃干扰的 最大响应值不满足要求
精选课件
点击返回
P270、6.7:
由于5.13节中超调量、调节时间和对单位阶跃干扰的 最大影响值不能同时兼顾。所以,对系统进行改进, 增加速度传感器。模型图如下:
精选课件
精选课件
结果及分析:
精选课件
循序渐进设计示例: 磁盘驱动读取系统
小组成员: 白益波 程威 李金华 王炬
控 制 系 统 设
点击进入
计 过 程
入点 击 进
入点 击 进
入点 击 进
精选课件
精选课件
P20、1.12:
图一:磁盘驱动器结构示意图 点击返回
P79、2.11:
选定执行机构、传感器和控制 器:采用直流电机驱动读取手 臂的转动,如图2所示。
matlab

课程设计说明本次课程设计主要目的是运用所学的自动控制原理的基本知识,结合具体的控制系统,利用计算机(MATLAB)进行辅助设计,而后通过比较确定一个合理的符合要求的控制系统,最后再通过仿真检验所选参数是否正确。
在本次课程设计中,选定设计磁盘驱动读取系统为设计课题,众所周知,磁盘可以方便有效地储存信息。
磁盘驱动器则广泛用于从便携式计算机到大型计算机各类计算机中.磁盘驱动器读取装置的目标是要将磁头准确定位,以便读取磁盘磁道上的信息(流程第一步)。
要精确控制的变量是磁头的位置(流程第二步)。
磁盘旋转速度在1800r/m和7200r/m之间,磁头位置的各项设计指标在各个设计进程中一一给定。
我们都知道,数学模型是分析和设计自动控制系统的基础。
在实际设计中,我们通常通过机理分析和实验测定来建立对象的数学模型。
在后面的设计过程中,我将会严格按照下面的设计流程图进行。
首先根据给定的时域图通过变形得出传递函数,再由根轨迹图并综合考虑指标要求,折中选择放大增益,而后对其仿真,若其动态及稳态性能均较理想,再对其进行完善即可,若不行还需重新选择参数,重新判断。
各部分设计内容:一、利用实验数据建立对象数学模型二、采用比例控制对原系统进行校正三、采用超前校正对原系统进行校正四、采用超前-滞后校正对原系统进行校正一、 利用实验数据建立对象数学模型(考虑读写头与悬臂刚性连接)1、实验原理图2、实验对象飞升曲线:图(1) 3、下表为有采样曲线得到并加以处理了的数据C (在MATLAB中编程绘制半对数坐标图:t=[ 0.0080 0.0090 0.0100 0.0110 0.0120];y=[ -4.4893 -5.1778 -5.8728 -6.5746 -7.2856];polyfit(t,y,1)ti=0.0070:0.001:0.0131;yi=interp1(t,y,ti,'profit');plot(t,y,'*',ti,yi)可得图为:图(2)由上图可得:斜率k= -698.9400 截距b=1.1094 在MATLAB中编制求系统参数及传递函数的程序如下:k=-698.9400;b=1.1094;ω1= -kα=exp(b)/(exp(b)-1)ω2=a*ω1T1=1/ω1T2=1/ω2num0=[1.5705];den0=[ T1 1];sys0=tf(num0,den0)num1=[1];den1=[ T21 0];sys1=tf(num1,den1)num2=[1];den2=[1/(ω1*ω2) (ω1+ω2)/( ω1*ω2) 1]; sys2=tf(num2,den2)num3=[1.15705];den3=[1/(ω1*ω2) (ω1+ω2)/( ω1*ω2) 1]; sys3=tf(num3,den3)num4=[1.15705];den4=[1/(ω1*ω2) (ω1+ω2)/( ω1*ω2) 1 0]; sys4=tf(num4,den4)从而得相关参数为:ω1 = 698.9400α=1.4920ω2 = 1.0428e+003T1 = 0.0014T2= 9.5894e-004各环节及系统的传递函数分别为:二阶对象传递函数:加静态增益:最终的开环传递函数:二、采用比例控制12、 控制系统的根轨迹图:(1)、原函数的根轨迹图:在MATLAB 中编程如下: Ka=1;num=[ 1.571*Ka];den=[1/(ω1*ω2) (ω1+ω2)/( ω1*ω2) 1 0];g=tf(num,den)rlocus(g),grid原函数的根轨迹图:图(3)(2)、加比例控制后的根轨迹图见步骤3。
磁盘驱动读取系统
s3
1
s2
1020
s1
b1
s0
5000Ka
20000 5000Ka
其中
b1
1020
20000 1020
5000Ka
当Ka=4080是,b1=0,出现临界稳定情况。由劳 斯表可得辅助方程
1020s2 5000 4080 0
解其方程得系 统其方程 纯虚根为 s1,2 141 .4 j。
磁盘驱动读取系统(续)
为了使磁头控制系统的性能满足设计指标要求, 我们在系统中增加了速度传感器。
R(s) +
--
放大器
Ka
N(s)
电机线圈
-
Ka(s)
+
1 s 20
1
C(s)
s
位置
速度传感器
s
开关
K1
位置传感器 H(s)=1
令速度传感器开关开启,且令
G2 (s)
s(s
1 20)
则闭环传递函数为
于是的闭环特征方程为
s3 1020 s2 20000 s 5000 Ka K1s 5000 Ka 00+5000K1Ka
s2
1020
5000Ka
s1
b1
s0
5000Ka
其中
b1
1020(20000
5000Ka 1020
K1)
5000Ka
为保证系统的稳定性,在Ka>0的条件下,参数对 (Ka,K1)的取值应使b1>0。当取K1=0.05,Ka=100时, 利用MATLAB文件求得的系统响应如图所示
C(s) KaG1(s)G2 (s)
驱动器的工作原理
驱动器的工作原理
驱动器的工作原理主要涉及到电磁学和机械学的知识。
一般来说,驱动器的工作原理可以分为读取和写入两个过程。
读取数据的过程中,驱动器会发送一个电流信号到读取头(磁头)上。
这个磁头会在磁盘上检测到磁场中的微小变化,并将其转换成电流信号发送给电路板。
电路板会根据信号的强弱和方向来确定磁场中的二进制数据(0和1)。
写入数据的过程中,驱动器会根据要写入的数据转换成电信号,并将其发送到写入头上。
写入头会根据信号的强弱和方向在磁盘中创建一个相应的磁场变化。
通过控制电流信号的方式,可以将特定的二进制数据写入磁盘中的特定位置。
驱动器的读取和写入过程是非常快速的,并且可以在非常短的时间内完成大量的数据传输。
这是因为磁盘上的数据可以同时被多个磁头读取和写入,从而实现并行操作。
此外,驱动器还有磁头定位的机制。
在读取或写入数据之前,磁头需要准确地定位到磁盘上的特定位置。
为了实现磁头的定位,驱动器中通常配备了定位系统,它可以根据电脉冲的指令控制磁头的位置移动。
通过不断地微调磁头的位置,驱动器可以准确地读取和写入数据。
综上所述,驱动器通过利用磁场和电流信号的变化来读取和写入数据。
通过精确的磁头定位和并行操作,驱动器可以高效地进行数据传输。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
磁盘驱动读取系统的分析设计一、闭环系统的性能分析(1)确定使闭环系统稳定的Ka 的取值范围>> G1=tf([5000],[1,1000]);>> G2=tf([1],conv([1,0],[1,20]));>> G=series(G1,G2)Transfer function:5000------------------------s^3 + 1020 s^2 + 20000 sg3=ss s K 2000010205000023++ 一一开环传函 G3=K s s s K 500002000010205000023+++ 一一闭环传函 >> syms K den>> den=[1 1020 20000 5000*K];>> K=den(2)*den(3)/den(1)/5000K =4080有劳斯判据可得k 的范围是0< K< 4080(2)在上述取值范围内取较小和较大的两个Ka 值,仿真闭环系统的阶跃响应,并进行分析K=100时>> g=100*Gg1=feedback(g,1)C=dcgain(g1)Transfer function:500000------------------------s^3 + 1020 s^2 + 20000 sTransfer function:500000---------------------------------s^3 + 1020 s^2 + 20000 s + 500000C =1[c,t]=step(g1);>> [y,k]=max(c);>> percentovershoot=100*(y-C)/Cpercentovershoot =21.6918>>t=setllingtime(g1)t = 0.3697K=1000时>> g=1000*GTransfer function:5e006--------------------------------s^3 + 1020 s^2 + 20000 s>> g2=feedback(g,1)Transfer function:5e006------------------------------------------s^3 + 1020 s^2 + 20000 s + 5e006>> [c,t]=step(g2);>> C=dcgain(g2)C =1>> [y,k]=max(c)y =1.7109k =11>> percentovershoot=100*(y-C)/Cpercentovershoot =71.0891t=setllingtime(g2)t =0.4989超调量 21.6918%%100)()()(%=⨯∞∞-=c c t c p σ调节时间=s t 0.3697(s)调节时间函数K=1000时超调量 71.0891%%100)()()(%=⨯∞∞-=c c t c p σ调节时间=s t 0.4989 (s)(3)考察扰动信号为单位阶跃时,上述两个Ka取值情况下,系统的抗干扰能力,并进行分析>> g2=tf([1],conv([1 0],[1 20]))Transfer function:1----------s^2 + 20 s>> g1=tf([5000],[1 1000])Transfer function:5000-----------s + 1000>> syms k>> g3=feedback(g2,g1,1)Transfer function:s + 1000-------------------------------s^3 + 1020 s^2 + 20000 s - 5000>> g3=feedback(g2,-g1,1)Transfer function:s + 1000-------------------------------s^3 + 1020 s^2 + 20000 s + 5000>> g4=-g3Transfer function:-s - 1000-------------------------------s^3 + 1020 s^2 + 20000 s + 5000()()()aK s s s s s Y s D 5000200001020100023+++-= --------------------扰动输入的传递函数 当K=100时>> g=tf([-1 -1000],[1 1020 20000 500000])Transfer function:-s - 1000---------------------------------s^3 + 1020 s^2 + 20000 s + 500000>> [c,t]=step(g);>> [y,k]=min(c)y =-0.0024k =15c (t )= 2.4*10-3(s )当K=1000时>> g=tf([-1 -1000],[1 1020 20000 5000000])Transfer function:-s - 1000--------------------------------s^3 + 1020 s^2 + 20000 s + 5e006>> [c,t]=step(g);>> [y,k]=min(c)y =-3.4308e-004k =11c(t)= 0.34*10-3(s)(4)针对如下的性能指标要求,折中选取一个合适的Ka值取Ka=100二、速度反馈系统的性能分析(1)运用第3章中所学的劳斯判据,确定要使闭环系统稳定,Ka和K1应如何选取?Ka=100,K1=0.03(2)针对你选取的Ka和K1,仿真闭环系统的阶跃响应,并计算超调量、调节时间和对单位阶跃扰动的最大响应值。
>> g1=tf([5000],[1 1000])Transfer function:5000--------s + 1000>> g2=tf([1],[1 20])Transfer function:1------s + 20>> g3=tf([1],[1 20])Transfer function:1------s + 20>> g0=feedback(g3*feedback(100*g1*g2,0.03,-1),1)Transfer function:500000--------------------------------------------s^3 + 1020 s^2 + 35000 s + 500000>> t=setllingtime(g0)t =0.2300>> [c,t]=step(g0);>> C=dcgain(g0)C =1>> [y,k]=max(c)y =1.0206k =38>> percentovershoot=100*(y-C)/Cpercentovershoot =2.0650超调量 2.0650%%100)()()(%=⨯∞∞-=c c t c p σ调节时间=s t 0.2300 (s)PD 控制器传感器实际磁头位置预期磁头位置+-误差+-()R s ()Y s ()V s m K R Ls +线圈载荷1()s Js b +()1H s =()D s 干扰G c (s)=K 1+K 3s>> g10=-feedback(g2*g3,-g1*100*(0.03*1/g3+1),1)Transfer function:-s - 1000------------------------------------------- ---------------------扰动输入传递函数s^3 + 1020 s^2 + 35000 s + 500000>> step(g10)>> [c,t]=step(g10);>> [y,k]=max(c)y =k =1>> [y,k]=min(c)y =-0.0020k =38对单位阶跃扰动的最大响应值:c (t )= 2.0*10-3(s )。
三、PD 控制器的性能分析——根轨迹法利用根轨迹图,分析K 3的变化对系统性能指标的影响,选取能够满足下列指标要求的K 3值 >> G3=series(G,tf([1 1],1)) Transfer function: 5000 s + 5000------------------------ s^3 + 1020 s^2 + 20000 sK3=14时GK3=feedback(G3*58,1); step(GK3,0.5)调节时间216ms超调量0………………………………………………最新资料推荐……………………………………… 11 / 11 对单位阶跃扰动的最大响应值31045.3-⨯。