PIC单片机在全回转舵桨控制中的应用
舵机简介及其单片机控制方法

1、概述舵机最早出现在航模运动中。
在航空模型中,飞行机的飞行姿态是通过调节发动机和各个控制舵面来实现的。
举个简单的四通飞机来说,飞机上有以下几个地方需要控制:1.发动机进气量,来控制发动机的拉力(或推力);2.副翼舵面(安装在飞机机翼后缘),用来控制飞机的横滚运动;3.水平尾舵面,用来控制飞机的俯仰角;4.垂直尾舵面,用来控制飞机的偏航角;遥控器有四个通道,分别对应四个舵机,而舵机又通过连杆等传动元件带动舵面的转动,从而改变飞机的运动状态。
舵机因此得名:控制舵面的伺服电机。
不仅在航模飞机中,在其他的模型运动中都可以看到它的应用:船模上用来控制尾舵,车模中用来转向等等。
由此可见,凡是需要操作性动作时都可以用舵机来实现。
2、结构和控制一般来讲,舵机主要由以下几个部分组成,舵盘、减速齿轮组、位置反馈电位计5k、直流电机、控制电路板等。
工作原理:控制电路板接受来自信号线的控制信号(具体信号待会再讲),控制电机转动,电机带动一系列齿轮组,减速后传动至输出舵盘。
舵机的输出轴和位置反馈电位计是相连的,舵盘转动的同时,带动位置反馈电位计,电位计将输出一个电压信号到控制电路板,进行反馈,然后控制电路板根据所在位置决定电机的转动方向和速度,从而达到目标停止。
舵机的基本结构是这样,但实现起来有很多种。
例如电机就有有刷和无刷之分,齿轮有塑料和金属之分,输出轴有滑动和滚动之分,壳体有塑料和铝合金之分,速度有快速和慢速之分,体积有大中小三种之分等等,组合不同,价格也千差万别。
例如,其中小舵机一般称作微舵,同种材料的条件下是中型的一倍多,金属齿轮是塑料齿轮的一倍多。
需要根据需要选用不同类型。
舵机的输入线共有三条,红色中间,是电源线,一边黑色的是地线,这辆根线给舵机提供最基本的能源保证,主要是电机的转动消耗。
电源有两种规格,一是4.8V,一是6.0V,分别对应不同的转矩标准,即输出力矩不同,6.0V对应的要大一些,具体看应用条件;另外一根线是控制信号线,Futaba的一般为白色,JR的一般为桔黄色。
PLC控制器在变桨控制系统中的应用

电动变桨PLC控制器设计PLC控制器在变桨系统中的应用1、引言功率调节是风力发电机组的关键技术之一。
风力发电机组在超过额定风速(一般为12~16m/s)以后,由于机械强度和发电机、电力电子容量等物理性能的限制,必须降低风轮的能量捕获,使功率输出仍保持在额定值附近。
这样也同时限制了叶片承受的负荷和整个风力机受到的冲击,从而保证风力发电机安全不受损害。
功率调节的方式主要有定桨距失速调节、变桨距角调节和混合调节三种方式。
目前兆瓦级风机普遍采用变桨距角调节方式。
而世界上大型风力发电机组变桨距系统的执行机构主要有两种,液压变桨距执行机构和电动变桨距执行机构。
其中电动变桨距系统的桨距控制通过电动机来实现,结构紧凑、控制灵活、可靠,正越来越受到大多数整机厂家的青睐,市场前景十分广阔。
2、电动变桨距系统2.1电动变桨距概述变桨距就是叶片绕其安装轴旋转,改变叶片的桨距角,以改变叶片的风能捕获能力,从而改变风力发电机的气动特型。
《风力发电机组原理与应用》。
电动变桨是用电动机作为变桨动力,图(1)为电动变桨距执行机构原理图伺服驱动器控制电动机带动减速机的输出轴齿轮旋转, 输出轴齿轮与桨叶根部回转支承的内侧的齿轮啮合,带动桨叶进行变桨。
<浅谈风力发电机组的液压和电动变桨系统>图1 电动变桨距执行机构原理图变桨距风力发电机组与定桨距风力发电机组相比,起动与制动性能好,风能利用系数高,在额定功率点以上输出功率平稳。
所以,大型和特大型风力发电机组多采用变桨距形式。
《风力发电机组原理与应用》变桨距角机组启动时可以对转速进行控制,并网后可对功率进行控制,使风力机的启动性能和功率输出特性都有显著改善。
变桨距角调节的风力发电机在阵风时,塔架、叶片、基础受到的冲击,较之失速调节型风力发电机组要小的多,可减少材料,降低整机重量。
它的缺点是需要有一套比较复杂的变桨距调节机构,要求风力机的变桨距角系统对阵风的响应速度足够快,才能减轻由于风的波动引起的功率脉动。
PIC单片机在电机控制系统的综合应用
电 路 相 连 , 须 光 电 耦 合 器 隔 离 , 给 应 用 无 带 来 极 大 方 便 , 另 外 还 可 提 供 2 mA 0 流 , 可 直 接 驱 动 LCD。 的 电
3 2 通 信接 口电路 .
RS-4 5 由 于 使 用 了 差 分 电 平 传 输 信 8 号 ,传 输距 离 比 RS-2 2更长 ,最 多 可 以 3 达 到 3 0 m , 因 此 很 适 合 工 业 环 境 下 的 应 00 用 。 本 设 计 采 用 RS 8 -4 5通 信 方 式 与 PC机 实 现 通 信 ,进而 实 现 远 程控 制 。本 系 统利 用 RC6、RC7口作 为 串行 接 口。 3 3 键 盘及 显 示 电路 . 3 3 1 键 盘设计 .. 根 据 设 计 需 求 ,需 启 /停 、 加 速 、减 速 、设 置 、换 向等 按 键 。可 将 操 作 模 式及 有 关 参 数 存 入 单 片 机 中 。 以 便 下 次 运 用 时 ,直 接调 出该 运 行 模 式 ,减 小 每 次 繁琐
・
应 用技 术 ・
P C单 片机在 电机控制 系统的综合应用 I
王 振 超
( 南 诚 字 电 子 科 技 有 限 公 司 开 发 部 济
山东济南 2 0 2 ) 5 0 2
【 摘 要】 电 机控 制 系统 以内部 资 源丰 富 的 PI 本 C单片 机 为核 心 ,通 过 外部 电 位器 或 外部 电 压模 拟 量 、 内部 电位 器 、外 部脉 冲信 号 、
1引言
随 着 机 器 人 技 术 的 发 展 ,各 种 电 力 拖
动 的 应 用 , 电位 机 信 号 和 电 机 传 感 器 信 号 , 将 取 来 的 信
要 求 , 装 置 设 计 中 采 用 PI F4 2 Cl 8 5 O单 片
全回转舵桨电力推进系统的设计
一
本转速 l , 4 8 7 r p m。电动机运行过程 中,如果两轴承端 或电 机转轴与轴承 间有轴 电流存在 , 将会 缩短 电机轴承使 用寿命 ,
本 文 采 用 自由端 绝 缘 轴 承 ,推 进 电机 与 变 频 柜 之 间 采 用 屏 蔽
电缆 。
并采用 d u / d t 滤波器 , 可降低 电机端子外的 电压上升速 度 ,并且抑制逆变器输 出 电压尖峰 ,这些快速变化 电压和尖 峰会对 电机绝缘造成冲 击。 同时可降低 电机 电缆的容性 漏 电 流、高频辐射和 电机 轴承 电流。
电源 质量 的 影 响 。
吊舱 式 全 回转 电力 推 进 是 在 上世 纪 八 十 年 代 后 期 , 出于 寻 求船 舶 在 破 冰 条 件 下 运 行 时具 有 更 好 的 机 动 性 和 可 靠 性 需 要而研 制的l 1 ≈ 】 。舵 桨 是 一 种 z 型传 动装 置 , 主 要 功 能 是 将 变
控制 。 关 键 词 :全 回转 ;电 力推 进 ;谐 波 抑 制
中图 分 类 号 :U 6 6 4 . 1 4 文 献 标 识 码 :A 文章编号 :1 0 0 6 - 7 9 7 3( 2 0 1 3 )0 3 - 0 1 2 1 — 0 3
前 言
( 1 ) 根本上消除 由推进变频器产生的高次谐波对发 电机
摘
要 :文 中是基于 对船舶 电力推进系统及其变频 调速系统的研究 ,运用 p l c技术设计 的符合实船要 求的全 回转舵
桨 电力推进 系统 。对船舶推进控制子 系统、舵桨控制子系统和 电网谐波 抑制进行研究的基础上 ,详细论述 了系统 的 结构、组成 及控 制功能 。此系统应 用变频传 动、 电机控制 、可编程控制器 、总线通信等技术 ,实现远程控制和就地
基于pic单片机的自动驾驶转向控制系统设计
法进行控制,对控制参数进行了整定。在一定车速和角度范围内,整个转向系统的控制效果比较好。
关键词:PIC单片机;转向系统控制;增量式PID控制算法;步进电机
中图分类号:TP273.5
文献标识码:B 文章编号:1003—7241(2008)03—0062-04
Automated Steering Control for the I ntelligent
Au(k)=“(七)一U(七一1)
下
=K,{【P(.|})一e(k一1)】+·}F(七),
』f
(1)
下
+{争【已(七)一2e(k—1)+e(k一2)】l
』
=K。Ae(k)+K,P(露)+KD【△P(七)一Ae(k一1)1
万方数据
工业控制与应用
ndustry Control and Applications
Ⅸ自动化技术与应用》2008年第27卷第3期
Keyword:PIC;steering control;incremental PID;controUer;stepper motor
1 引言
近年来,对于智能车辆自动驾驶的研究是一个热 点。智能车辆是依靠自身获得的位置信息或根据外部 环境提供的导航信息,沿预定的路径在无人干预的情况 下,安全可靠地运动到期望目的地的车辆。自主导航与 自动驾驶是智能车辆开发的关键技术…1。自动驾驶控制 包括两个方面的内容,一个是方向控制也叫横向控制, 主要是控制智能车辆前进中的形式方向;另一个是纵向 控制也叫巡航控制,主要控制车速和保持车距。国内在 汽车自动驾驶的研究主要集中在图像识别导引方式上。 自动驾驶控制的实现是其中一个研究的重要内容。本 研究中的自动驾驶系统也是基于视觉导航,采用上一下 位机的方式控制。上位机中央处理器处理由摄像头采 集到的图像信息,由驾驶员模型得出控制参数(方向盘转 角或前轮转角)。下位机一PICl6F877A单片机接收来 自上位机的命令,由控制器控制转向执行机构使方向盘 转过一定角度,以使车辆按照预定的轨迹行驶。转向执 行机构是由步进电机带动方向盘完成。步进电机数字
PIC单片机在电机控制系统中的综合应用

1 0 2 ・
科 技论 坛
P I C单片机在 电机控制系统中的综合应用
杨祥文 于云飞 范清伟 ( 内蒙古霍林河露天煤 业股份有限公 司供 电部 )
摘 要: 内 部 资源丰富的 P I C单片机作 为本 电机控制 系统为核心 , 借 由外部电位 器或者外部 电压模拟量 、 外部脉冲信号、 内部 电位器 、 上位机、 键盘模块及精巧 的电机驱动 电路模 块以及 较为精确的霍 尔传感 器来控制 电机 的启动 / 停 止、 换 向、 加减速及其定位 , 经由L C D 显示模 块作 为电机的运行状 态的指示。经实践证 实, 这个设计方案具有合理性 和可行性 , 并且具有应用场合 多样、 操作 简便 、 成本合算 、 功 能 多元、 功率强劲、 应用灵 活、 高可靠性等诸 多 优 点。正是这些优点使 P I C单片机 可以得到综合利 用。 关键词 : P I C单 片机 ; L C D; 电机控制 运转角度的有关装置 。 传感器产 生的脉冲信号经过 7 4 H C 1 4 两级驱 随着机器人技术 的发展,各种电力拖 动的应用 ,电力 电子 的发 动放大, 送 到单片机 R B 6 、 R B 7 的对应引脚上 , 利 用单 片机 R B口的 展, 电机控制系统也在工业 和人们生活 当中得到广泛的应用, 如 电动 弱上拉功能, 实现单片机对 电机 的实时检测 。 车、 打 印设备 、 机器人 等都用到 电机控制系统, 经 过市场调研发现市 4 系统软件设计 4 . 1主程序。该 系统 的整个 软件设计全部采用模块化程序设计 场上很 多电机控制器, 一些 只有部分功能。 兼 容多种场合应用 、 操作 由系统初始化 、 按键识别 、 显示等模块组成 。 其 中, 系统初始化 、 方便的控制系统 较少 。因此, 研制开发新型 、 综合性 、 多场合兼容 电 思想, 机控制系统有非 常重要意义 。结合生活实际应用 和工作经 验, 设计 按键识别及显示模块在 主程序 中完 成, 而 中断服务完 成 T MR O定 时 s 溢 出中断 、 T M R1 外 部计数 溢 出中断 、 T M R 3的 1 u s 计 数溢 出中 了一款新型直流 电机控制器 。本控制器是以功能强大 、 价格低廉的 1 外部脉冲下 降沿捕获中断及 A / D转换中断等 。 P I C 单 片机 为核 心, 以显示键盘, 电机驱动, 传感器, 上位机 串口控制 , 断、 4 . 2系统初始化模块。主程序 中的系统初始化模块 包括对 P I C 外部信 号控制等 电路模块共 同组成。 单 片机 的 C P U系 统时 钟初始 化 、 P I C单 片 机 的 I / 0方 向初 始化 、 2 系统总体设计方案 P I C单 片机 处理器经过检测按 键 、 外部 电位器和模 拟量 、 外部 T MR O定时 / 计 数器 的初始化 、 T M R1 定时 / 计数器的初始化 、 T MR 3 计数器 的初始化 、 C C P模块 的初 始化 和系统相关变量 的初始 P WM信 号、 上位机信号和 电机传感器信号, 将 取来的信号经过处理 定时 / 后, 送 到电机驱动 电路模块 进而驱动控制 直流 电机相应 动作, 同时, 化过程 。 4 . 3 电机运转控制模块 。电机运转 控制模块包括 电机 的方 向控 为了让电机平稳的运转, 将电机传感器传输 过来 的信 号经过 P t D算 它们 由 Mo t o r D i r e c t i o n和 M o t o r P WMD a t a两个 法和频率同步算法, 计算结果 和检测电机的有关数据送 L C D显示模 制和电机的速度控制, 变量 来控 制 P I C单 片机 的 C C P模 块产 生 不 同 的 P WM信 号 送 到 块显示, 让客户较清楚地了解 电机实时情况, 以便相应 的操作。 7 4 1 . 5 2 5 8 对应 引脚 。 通过 7 4 L S 7 5和两个 I R 2 1 0 4驱 动电机 。Mo t o r P — 3 系统硬件设计 D a t a是 P WM模 块 占空 比的具体 内容, 改变 M o t o r P WMD a t a的值 整个系统由信号处理 电路 、 P I C 1 8 F 单片机系统 、 直流 电机驱动 WM 电路和反馈信号检测处理 电路等几部分组成 。 就可以改变 电机的速度 。 4 . 4 L C D显示模块 。L C D显示驱动单独做成一个源程序文件和 3 . 1单 片机系统 。单 片机 系统 主要有 C P U、程序 存储 器 E — 可方便其他模块调用。在 L C D显示驱动模块 中主要是 L C D P R O M、 数据存储器 S R A M、 通信功能 、 多路 A / D 采样 、 C C P / P WM功 头文件 , 能、 R B弱上拉功能 、 多个定时器 、 外 中断和串行 口通讯等组成 。 为满 初始 化 函数 L C D L N I T 0 、 写 指令 函数 L C D WR C O M0 、 L C D WR D A T A 足多端 口多功能设计 的要 求, 装置设计 中采用 P I C 1 8 F 4 5 2 0单 片机。 0 、 显示字符 函数 L C D D I S P 0 。 4 . 5上位机软件。上位机软件用 V B编写 , 主要用来控制电机的 利用 P I C 1 8 F 4 5 2 0可以减少外围电路, 且其引脚具有 防瞬态能力, 可 换 向、 启动 / 停止 、 定位等功能。还可 以实时监控和记 录电机 直接 与控 制电路相连, 无须光 电耦合 器隔离, 给应 用带来极 大方 便, 转速 、 另外还可提供 2 0 mA 的电流, 可直接驱动 L C D。 的状态, 使用户清楚地了解电机和控制 器的实时状况 。人机界 面转 3 . 2通信接 口电路。R S - - 4 8 5 由于使用 了差分 电平传输信号, 传 速在 1 - 3 0 0 0 R P M可选可写, 正反换 向选 择, 启停 和 0 - 3 6 0度角 度定 则必须事先设定在该模式下, 才可以, 我们 输距 离 比 R S 一 2 3 2更长, 最多可 以达 到 3 0 0 0 m, 因此很适 合工业环 位选写。若选定远程控制, 选择用 R B 3口作为启动远程控制选择端, 低 电平有效。 境下的应用。 本设计采用 R S - - 4 8 5通信方式与 P c 机实现通信, 进而 实现远程控制。本系统利用 R C 6 、 R C 7口作 为串行接 口。 5 结 论 这种系统的设计有很 多的优点 ,可 以适应 多种的应用场合 , 既 3 . 3键盘及显示电路。3 . 3 . 1键盘设计 。根据设计需求,需启 / 它还具有操作简单快捷的 停、 加速 、 减速、 设 置、 换向等按键 。 可将操作模式及有关参数存 入单 可 以现场操作使用又可以实现远程操作 , 片机 中。以便下次运用时, 直接调出该运行模式, 减小每次繁琐操作。 特点 ; 另外 , 这个 系统既可选用外部的信号源也 可以选择 内部 的电 客户具有很大的选择空间 ; 既可以用 L C D显示 3 . 3 . 2显示 电路。 在本设计 中, 显示 的主要是参数( 占空 比, 转速, 方 向) , 位器和 内部的按键 ; 这个控制器集 选用 1 6 " 2的 T S 1 6 2 0 显示屏, 它成本低 , 显示较完整。显示 电路 的设 设备的有关数据也可 以使 用电脑监控使人一 目了然 。 I C 1 8 F 4 5 2 0单片机 的内 计采 用单 片机 R D 0 一 R D 7口作 为并行 口与 T S 1 6 2 0的 D B O — D B 7相 成 了市面上 多种 电机控制系统的优势 ,对 P 部资源做 到了充分利用 , 例如 A D模块 , R B上拉多种功 能 , 利 用 了 连接, 将R E 0 一 R E 2口分别与 R s 、 R W、 E N相连 。 3 . 4 A D转换电路模块 。由于 P I C 1 8 F 4 5 2 0 单片机本身带有 A D 多个定时器 , 多个 中断 , 以及 C C P 等功能 。并且巧妙 的利 用巧妙设 转换接 口, 所 以不用外加 A D转换芯片, 这样就减化 了外部 电路 。该 计代替 复杂设计 , 还有 易于修改 的特点 , 这些特性 使得产 品的开发 转换 电路模块 用 P I C单 片机 的 A N O 、 A N 1 和A N 3 三个 A D转换 接 成本得到节约以及很好的保密性 。 1 2 1 分别作为调速电位器 、 延 时坡度电位器和最大 限流电位器接 口。 参考文献 1 1 李学海. P I C单 片机应 用教程( 基础篇) 【 M 】 . 北京: 北京航 空航天 大学 3 . 5 外 部 脉 冲 信 号 模 块 。该 系 统 充 分 利 用 P I C 1 8 F 4 5 2 0的 『
PIc单片机直流电机控制器的设计和应用

三 、基 于 P I C 单 片机 技术 的直 流 电机 控 制器 设 计与 应用 ( 一) P I c 单 片 机 直 流 电 机 控 制 器 系 统 结 构 介绍 在 直流 电机 多速 控 制 器 系 统 中 ,P I c 单 片 机 扮 演 的 是 整 个 系 统 控 制 核 心 的 角 色 ,利 用 键 盘 对 每 一 段 的 运 行 参 数 ,诸 如 键 盘 输 入 电 路 、 电源 电路 、基 准 电压 电路 、D / A 转 换 电路 、 显 示 电 路 等进 行 设 计 ,此 次研 究 中使 用 数字 M R 编码 器 , 型 号 为 L,分 辨 率 为 1 0 2 4。 由于 在 实 际 运行 中 单片机I / o口 的 限 制 , 额 外 增 加 了 外 围 硬 件 确保 对 于 运 行过 程 中 的段 位进 行 显示 , 同时在 设定 时 间 、转速 以及 实 际测 量转 速 上 做 到有 效 的干 预 。该 系 统运 用R S 一 2 3 2 串 行 通 信 ,波 特 率 设 定 在 1 9 2 0 0 0 b p s ,系 统 的 构 成 方 式 为4 * 4 行 列 式 键盘 ,其 中包 括 数 字键 为0 ~9 、设置 键 、确认 键等 等 。 ( 二) 基 于P I C 单 片 机 技 术 的直 流 电机 控 制器 的实 际应 用
…
…
…
…
…
…
…
…
…
…
一
皇 蕉 一 一 -
PI C革 片 讥 直 琉 电 讥 控 { } ; j 器 的 设 计 和 应 用
浙江一舟 电子科技 股份 有限公 司 赵 晓青
【 摘 要 】本 文 旨在 于 通过 对 现 实 应 用 效 果 的分 析 , 向广 大 读 者传 递 出P I C单 片 机 直 流 电 机 控 制 器 不 仅 仅 能 够 满 足 应 能 指 标 的 设 计 要 求 ,更 可 以顺 利 实现 高精 度 多速
船舶全回转舵桨推进系统的工作原理及应用

船舶全回转舵桨推进系统的工作原理及应用作者:陶如豪来源:《中国水运》2021年第11期摘要:船舶全回转舵桨推进系统是用于推进和操纵船舶的主要控制系统。
随着发展这项技术在船舶操纵控制领域运用越来越广泛。
本文根据目前船舶全回转舵桨推进系统的技术发展情况,介绍了全回转舵桨船舶推进系统的工作原理,主要特点以及优缺点。
关键词:船舶;全回转舵桨;工作原理;优缺点中图分类号:U66 文献标识码:A 文章编号:1006—7973(2021)11-0086-02船舶传统推进方式主要是通过主机、齿轮箱、尾轴向螺旋桨输出推进动力,推动船舶航行;通过齿轮箱来实现换向功能;通过舵系来实现控制船舶的航向。
在八十年代出现了一种全新船舶推进系统,这就是船舶全回转舵桨推进系统又称为全回转舵桨推进器或“Z形推进器”它集推进和转舵功能于一体,完全可以替代由船舶主机、齿轮箱和尾轴、螺旋桨等组合的传统船舶推进方式。
从而彻底改变了传统船舶操纵方式。
全回转舵桨推进系统的出现是船舶推进方式的一次革命。
经过二十多年的发展和应用,船舶全回转舵桨推进系统相关技术已经非常成熟了,并且在各种类型的船舶上得了的广泛应用,引起世界各国船舶行业的极大关注。
1 全回转舵桨船舶推进系统的工作原理船舶全回转舵桨推进系统又称“Z形推进器”。
因其吊舱内的轴系布置方式呈Z字形而得名。
全回转舵桨推进器是固定在船体水下,船舶螺旋桨的相关传动系统是布置在吊舱之内,它由电力或机械动力驱动。
该推进器是集船舶推进和船舶操控两种功能于一体。
可以通过吊舱内伞形齿轮装置、蜗轮蜗杆装置传动,使船舶螺旋桨围绕吊舱内竖轴作360°转动,该种推进器可以根据船舶位置变化随意变换推力的方向,可实现向任意方向推进。
也可实现船舶原地掉头,进退灵活自如。
船舶的机动性能和操纵性能都得到极大改善。
可完全实现同时操纵推进船舶的功能。
船舶全回转舵桨推进系统工作原理是船舶通过主机或电动机等输出功率通过吊舱顶部横向一级伞齿轮传动至竖轴,竖轴将输出功率传输至吊舱底部横向二级伞齿轮通过齿轮上的横轴传递给螺旋桨,最终形成一个Z字形传动系统。
pic单片机的原理和应用

pic单片机的原理和应用一、pic单片机的概述PIC(Peripheral Interface Controller)单片机是由美国Microchip Technology公司生产的一种微控制器,广泛应用于嵌入式系统和电子设备中。
它采用哈佛结构,具有高性能、低功耗、易于编程等特点,在各种领域的控制应用中得到了广泛的应用。
二、pic单片机的核心组成部分pic单片机由五个主要部分组成,包括中央处理器(CPU)、存储器、输入/输出(I/O)端口、计时器/计数器和通信接口。
1.中央处理器(CPU):pic单片机通过CPU实现程序的控制和计算操作。
它包含一个ALU(算术逻辑单元)、寄存器和指令集,用于执行程序中的指令。
2.存储器:pic单片机具有多种类型的存储器,包括闪存存储器(用于存储程序代码和数据)、随机存取存储器(RAM)和特殊功能寄存器(SFR)。
这些存储器用于存储程序、变量和配置信息。
3.输入/输出(I/O)端口:pic单片机提供了多个I/O端口,用于与外部设备进行通信。
它们可以用于读取输入数据或控制输出信号,实现与外部世界的连接。
4.计时器/计数器:pic单片机具有多个计时器和计数器,用于执行时间相关的任务。
它们可以用于测量时间、生成定时器中断、计数输入脉冲等操作。
5.通信接口:pic单片机支持多种通信接口,包括串行通信接口(如SPI和I2C)和通用异步收发器(UART)。
这些接口使pic单片机能够与其他设备进行串行通信,实现数据传输和通信功能。
三、pic单片机的应用领域pic单片机在各种控制和嵌入式系统中得到了广泛的应用。
以下是pic单片机的一些常见应用领域:1.家用电器控制:pic单片机可以用于控制家用电器,如洗衣机、冰箱、空调等。
它们可以通过读取传感器数据并根据程序逻辑来控制电器的运行状态和功能。
2.工业自动化:pic单片机在工业自动化领域中得到了广泛应用。
它们可以用于控制生产线上的设备、监测温度、湿度、压力等参数,并根据需要进行相应的控制和调节。
基于PIC单片机的舵机控制系统设计
O引 言
舵 机作 为 无人 机 制 导 系统 的 主要 组成 部 分 , 是 操 纵机 动飞行 的重要 执行 机构 。舵机 的作 用是 根据 飞行器 制导 控 制 电路 输 出 的一 定 大 小 和 极 性 的信 号, 操纵 无人 机 的舵 面或 副 翼 或 改变 发 动 机 的 推力
机控制系统的设计与实现 , 并给出了调试结果。
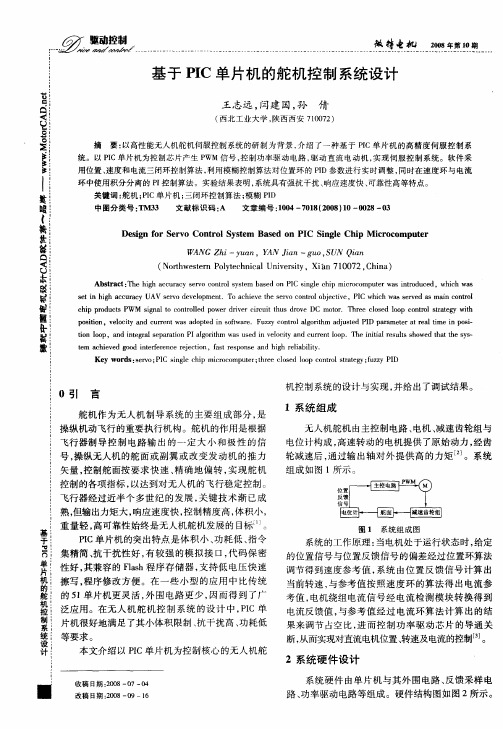
1系统 组 成
无 人机 舵机 由主控 制 电路 、 电机 、 速齿 轮组与 减 电位计 构成 , 高速 转动 的 电机提供 了原始 动力 , 经齿 轮减 速后 , 通过输 出轴 对 外 提供 高 的力矩 。系统 组成 如 图 l 所示 。
矢量 , 控制舵 面按 要 求 快 速 、 确 地 偏 转 , 现 舵 机 精 实
st nhg c ua yU V sn0d v l m n. oa h v e ev o t l be t e PC w i a  ̄e s a o t l e i i a c rc A , e e p e t T c i et roc nr jc v . I hc w s e da i c nr h e o e h s oo i h s m n o
Ab t a t T e hg c u a y s ro c n r l y tm a e n P C s ge c i c o o u e a n rd c d s r c : h ih a c rc e V o t se b s d o I i l h p mir c mp trw si t u e .whc s os n o ih wa
psin vl i n urn w saot f a .F z ot l l rh dutdPDp r ee eli oi oio , e c yadcr t a d p di s t r uz cnr g i m ajs I a m tr t a t i ps t ot e e n ow e y oa ot e a a r me n ・
某平台供应船CPP舵桨装置应用

某平台供应船CPP舵桨装置应用作者:***来源:《广东造船》2024年第02期摘要:CPP舵桨是一种新型的可调螺距螺旋桨的Z型传动装置,螺旋桨的推力方向可在水平面内任意改变,且可实现其推力大小与其方向合理配合,改进了船舶传统推进装置结构形式,大幅提升了船舶的操纵性和灵活性,适用性强,市场应用前景广。
文章以某57m海上平台供应船的轴系布置与设计为例,阐述CPP全回转舵桨推进装置的结构特点、性能,以及其在海上平台的应用,并根据船舶布置要求对轴系布置进行优化设计,满足了海上平台供应船对机动性及操纵性的要求。
关键词:海上平台供应船;CPP全回转舵桨;轴系设计与布置中图分类号:U664 文献标识码:ACPP Rudder Propeller Device Arrangement of a Platform Supply VesselLV Haiyan( Guangzhou Shunhai Shipyards Co., Ltd., Guangzhou 511440 )Abstract: CPP Azimuth rudder propeller is a new Z-type transmission device with controllable pitch propeller (CPP). All thrust of CPP propeller can act in any direction, so as to obtain the best match of propulsion direction and thrust, thus completely changing the traditional ship propulsion mode, greatly improving the maneuverability and mobility of ships, and having stronger applicability and better market. This article presents the shafting layout and design of a 57 m offshore platform supply ship , and structural characteristics & performance of its CPP Azimuth rudder propeller propulsion as well as its application in offshore platforms, and optimizes the shafting layout according to the ship’s requirements, which is satisfied with the requirements of maneuverability and manipulation of this type of ships.Key words: offshore platform supply ship; CPP azimuth rudder propeller; shafting design and layout1 前言海上平台供应船通常用于海上石油平台服务,其往往具有物资供应、海上救助和巡逻、拖带、对其它船进行消防灭火、运送人员等功能。
最新-剖析PIC单片机的应用方法 精品

剖析PIC单片机的应用方法20世纪90年代以来,随着集成电路特征线宽的持续缩小以及芯片密度和工作频率的相应增加,降低功耗已经成为亚微米和深亚微米超大规模集成电路设计中的一个主要考虑因素。
功耗的增加会带来一系列问题,例如电路参数漂移、可靠性下降、芯片封装成本增加等。
因此,系统的功耗在整个系统设计中,尤其是在采用电池供电的系统中显得十分重要。
公司系列的单片机为设计高性能、低功耗的单片机系统提供了很好的解决方案。
下面从低功耗设计方法及具体例子来介绍单片机低功耗应用。
1低功耗设计方法为使系统工作在低功耗状态,必须正确设置单片机的配置及工作方式。
下面结合最常用的12、16等单片机介绍低功耗系统的设计方法。
11基本设计方法有许多技术可以降低系统的功耗,最常用的是模式。
程序执行一条指令,便进入了休眠模式。
要模式下,晶振停止振荡,而此时单片机在3电源条件下,只有1μ的电流。
系统工作时,单片机可以采用看门狗或外部事件周期性地唤醒单片机,利用电子开关为系统提供电源,以减少系统待机功耗,延长电池使用时间。
单片机的工作频率和功耗的关系也很大,频率越高,功耗越大。
在采用32晶振、3工作电压时,12、16等系列单片机的典型工作电流只有15μ;而采用4晶振、5工作电压时,单片机的典型工作电流达到几。
在许多低功耗的场合,采用低速晶振实现低功耗非常有效。
如果单片机采用振荡,还可以通过口的操作改变振荡电阻,从而改变单片机工作频率,达到节能的目的。
如图1所示,1个引脚可以在等待状态下将并联电阻1去掉,降低单片机工作频率。
当单片机需要工作时,可将引脚设置为输出并输出高电平,从而提高振荡频率。
12振荡电路设计在单片机系统设计中,振荡电路的设计是十分重要的一个环节。
系列单片机的典型振荡电路如图2所示。
一般情况下,设计人员按照厂家给出的参数表进行选择。
如果系统能够正常工作,也就不再进行改进了。
其实,这是不合适的。
因为的单片机根据型号和版本的不同,工作电压在直流25~55的范围内,汽车级温度可以在-40~-125℃范围内,而参数表中只给出了有限的几种情况,实际环境参数会对振荡电路的性能产生很大的影响。
PLC在风力发电机变桨上的应用
PLC在风力发电机变桨上的应用发表时间:2018-08-16T10:08:59.373Z 来源:《电力设备》2018年第15期作者:毛兵[导读] 摘要:在我国快速发展的过程中,我国的科技在不断的进步,一种风力发电机组变桨控制系统。
(上海昱章电气成套设备有限公司上海 201612)摘要:在我国快速发展的过程中,我国的科技在不断的进步,一种风力发电机组变桨控制系统。
系统采用可编程逻辑控制器(PLC)为主控制器,控制3个桨叶同步变换桨距角。
变桨系统的驱动部分由驱动器和驱动电动机组成,驱动器接收PLC提供的控制量,驱动步进电动机按照控制要求转动,带动桨叶完成规定的桨距角的旋转,达到控制风力发电机桨叶角度变化的目的。
关键词:风力发电;桨距角;PLC;变桨系统引言全球工业化进程的加快使得能源消耗大幅增长、全球排放有害物的工业废弃物数量日益增加,进而造成了气候异常变化、自然灾害频发和恶性疾病患病人数增多等现象,因此环境和能源问题成为当今世界人民面临的重要问题。
能源危机和日益变化的环境问题,让我们认识到开发清洁的可再生能源是客观需要。
风能就是一种新型的清洁能源,广泛存在于自然界中,其与物质燃料煤、天然气、石油不同,它不会减少且一直存在,而且无处不在,可以说是一种用之不竭、取之不尽的能量。
而物质燃料在地球上的储量有限且正在日趋减少,这也是风力发电正受到世界人民关注的原因。
1变桨系统结构风机根部的叶片通过变桨轴承与轮毂进行连接,每一片叶片都有自己独立但同步的变桨驱动系统,变桨驱动系统通过啮合联动来旋转叶片。
变桨系统控制结构,如图1所示。
在正常运行期间,风速在额定风速时,即风速在12~25m/s之外时,控制桨角度限定在0°~30°,通过控制叶片与风向的角度使风机的转速保持恒定。
因其他情况引起的停机都会使叶片顺桨到90°位置。
每个变桨驱动系统都配有一个绝对值编码器安装在叶片根部与变桨轴承的内齿旁,通过小齿轮与变桨轴承的内齿进行啮合联动并记录变桨角度。
用Pic单片机控制8路MG995舵机
用Pic单片机控制8路MG995舵机(servo motor)的实现方法一个PIC16F877A单片机有1个16位定时器TIMER1,我们用来控制8个舵机(即顺序脉冲输出),这样一个单片机就可以控制8个舵机。
用8个IO口来控制舵机,舵机控制的信号周期为20mS,而正脉冲最大只有2.5mS,这样有17.5mS是空的。
可以采用这种方法:在RD0口输出一个0.5~2.5mS的脉冲,控制一号舵机。
完成后,用端口RD1口输出另外一个脉冲,控制2号舵机,就这样下去.....在一号舵机需要第二个脉冲之前,可以输出 20/2.5=8个脉冲,可以用来控制8个舵机,当然,需要用8个IO口。
但是一般来说不可能正好有8个2.5mS的脉冲来填满20mS,这样就需要对输出脉冲的总宽度进行累加补偿,然后再用低电平填满20mS中剩下的时间。
一个周期让timer1工作8~9次,前8次每次根据不同舵机的脉宽要求进行定时,每次都对不同的IO口输出脉冲.第九个定时是用来填满20mS的剩余时间的. 每个口在输完脉冲后,置0 ,然后单片机就不用管他,可以进行下一个IO口的脉冲输出了. 这样一个单片机顺序对8个IO口进行脉冲输出. 虽然每个舵机的脉冲时间有一点延迟,但是不超过20mS,这对于舵机这种低速运行器件来说是完全感觉不出来的。
仿真如下图:下面就用这种方法进行编程。
#include <htc.h>unsigned char servo_angle_H[8];unsigned char servo_angle_L[8];unsigned char compensate_TL;unsigned char compensate_TH;unsigned char p;void set_servo (unsigned char angle0,unsigned char angle1,unsigned char angle2,unsigned char angle3,unsigned char angle4,unsigned char angle5,unsigned char angle6,unsigned char angle7){unsigned int temp,temp0,value[8];unsigned char i;for(i=0;i<8;i++){servo_angle_H[i]=64468/256;servo_angle_L[i]=64468%256;}compensate_TL=50268%256;compensate_TH=50268/256;temp = angle0+angle1+angle2+angle3+angle4+angle5+angle6+angle7;value[0]=65068-(100*angle0)/9;value[1]=65068-(100*angle1)/9;value[2]=65068-(100*angle2)/9;value[3]=65068-(100*angle3)/9;value[4]=65068-(100*angle4)/9;value[5]=65068-(100*angle5)/9;value[6]=65068-(100*angle6)/9;value[7]=65068-(100*angle7)/9;for(i=0;i<8;i++){servo_angle_H[i]=value[i]/256;servo_angle_L[i]=value[i]%256;}temp0=46068+(100*temp)/9;compensate_TL=temp0%256;compensate_TH=temp0/256;}//主程序***********************************************************************void main(void){unsigned int a;unsigned int b;INTCON=0;GIE=1;// ;打开总中断PEIE=1;// ;打开外部中断使能位TMR1IE=1;// ;打开TMR1中断TRISD=0X00;PORTD= 0X00;//脉冲波形起始状态T1CON=0x01;//设置TMR1的控制字TMR1IF=0;unsigned char i;set_servo (13,34,56,87,80,123,156,13);while(1){; }}//中断服务程序*************************************************************void interrupt timer1(void){TMR1IF=~TMR1IF;switch(p){case 0: TMR1L=servo_angle_L[p];TMR1H=servo_angle_H[p];PORTD=0X01; break;case 1: TMR1L=servo_angle_L[p];TMR1H=servo_angle_H[p];PORTD=0B00000010; break;case 2: TMR1L=servo_angle_L[p];TMR1H=servo_angle_H[p];PORTD=0B00000100; break;case 3: TMR1L=servo_angle_L[p];TMR1H=servo_angle_H[p];PORTD=0B00001000; break;case 4: TMR1L=servo_angle_L[p];TMR1H=servo_angle_H[p];PORTD=0B00010000; break;case 5: TMR1L=servo_angle_L[p];TMR1H=servo_angle_H[p];PORTD=0B00100000; break;case 6: TMR1L=servo_angle_L[p];TMR1H=servo_angle_H[p];PORTD=0B01000000; break;case 7: TMR1L=servo_angle_L[p];TMR1H=servo_angle_H[p];PORTD=0B10000000; break;default:TMR1L=compensate_TL;TMR1H=compensate_TH;PORTD=0B00000000;p=0; break;}p++;}。
PIC单片机原理及应用(第十一章)

比较功能
CCP 模块第 2 个功能是比较方式输出,用于 从引脚上输出不同宽度的矩形脉冲信号、不同 的周期频率脉冲以及非周期频率信号等。 根据预置的特定值(CCPR1)与TMR1计数器 的计数值进行比较,当两者数值一致时给出比 配信号,触发 CCP 中断标志位置位。由 RC2 引脚 可以输出3种逻辑状态。
第11章
CCP捕捉/比较/脉宽调制
配置了 2 个捕捉/比较/脉宽调制模块 CCP1 、 CCP2(Capture/Compare/PWM)。 它们各自都有独立的16位寄存器CCPR1和CCPR2, 两个模块结构、功能、操作方法基本一样,它 们的区别仅在于各自有独立的外部引脚,以及 各自的特殊事件触发器。 它们的功能实现,往往与定时器TMR1、TMR2复 合使用。
TMR2控制寄存器:T2CON
CCP控制寄存器CCP1CON
Bit3-Bit0/CCP1M3-CCP1M0 :脉宽调制功能设置, 主动参数。
11XX:脉宽调制方式,低2位不起作用。
Bit5~Bit4/CCP1X~CCP1Y:CCP1脉宽寄存器的低2 位,高8位在CCPR1L中,数据参数。
PWM操作设置
Bit5-Bit4/CCP1X-CCP1Y: PWM工作循环周期的最低2位,数据参数。作为其输出信号 脉宽的低2位,高8位在CCPR1L中。 捕捉方式:未用。 比较方式: 单片机的输入捕捉功能,就是对外部 从引脚 CCP 上输入的脉冲上升沿或下降沿进行 实时捕捉检测。 容易实现对信号周期及脉冲占空比的检测。
CCP1控制寄存器 :CCP1CON
Bit7 Bit6 Bit5 CCP1X Bit4 CCP1Y Bit3 Bit2 Bit1 Bit0
CCP1M3 CCP1M2 CCP1M1 CCP1M0
基于PIC单片机的仿生机器鱼的舵机控制
基于PIC单片机的仿生机器鱼的舵机控制
仿生机器鱼实验平台属于教育部和北京邮电大学共同出资支持的一项“国
家级大学生创新性实验计划”项目,是一个集光、机、电、流体、智能于一体
的实验平台,研究内容包括:仿生机器鱼机械结构的研究,推荐效率的研究以
及控制性能的研究。
1 仿生机器鱼平台简介:设计制作的机器鱼模仿科鱼类的外形,头部采用刚性结构的塑料材料。
其形状采用流线型,模仿真鱼鱼头的
形状和大小比例。
在鱼头的内部空间里安装电源及控制电路,并在鱼头两侧鱼
眼处及在头前部的偏下侧安装了3 个红外传感器,构成了一个探测左、前、右三个方向的传感器网络,让鱼具有自助避障的功能。
使用铝合金制作的鱼骨架把三个舵机串联起来,鱼骨架支撑起套于舵机外面的橡胶鱼皮,便构成了了
机器鱼的鱼身这个三关节的驱动系统。
使用铝合金制作的连接件将鱼身通过螺
纹连接的方式固定在在刚性鱼头上,鱼身的橡胶鱼皮使用热熔胶粘在鱼头上,
这样便构成了机器鱼的整体结果。
具体如图1 所示。
实验证明,这种方法简单易行,且方便拆卸和组装。
机器鱼技术指标:巡游速度:1.2~1.5m./s;全电量巡游距离:4.5~5.5 千米;转弯半径:15~20cm。
2.系统组成及工作原理:
从功能上看,整个鱼体的系统可以分成三大块,分别是:感知区,决策区,
行为区。
感知区对应着多红外传感器网络和无限传输模块,而决策区指的是主
控芯片(MCU),动作区对应着舵机串联组成的三关节驱动系统。
具体如图2 所示。
本系统的最重要的工作集中在对多舵机的协调控制,因此主要围绕舵机的控制
工作进行细致详尽的介绍。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
出指 示信 号 。
图2
图 3
2电位 器 的选 用
选用精密导电薄膜旋转电位 器作 为控制和反馈传感器 , 由于全 回转舵桨 3 0 死区连续 回转 , 6匠 而一般的旋转 电位器 都有死 区 , 因此选用双联 同轴电位器 , 上下联错开精确 的 角 度, 互相覆 盖死区 , 上下联 的输 入信 号通 过软件计算 为连续
型 负 载
轮上 目前应用的 PC单片机实现全回转舵桨随动控制 系统 。 I
P C 单 片 机 的特 Байду номын сангаас I
PC单 片机是美 国 Mirc i 司推 出的 8位高性能嵌 I co hp公 八式微 控制器 , 它具 有高速度 、 工作 电压 、 低 低功 耗 、 大驱 强
随动控 制系统 的组成
的角度 , 实现无死区的控制。 3隔离驱动电路 由于 电磁 阀属于 电感性负载 , 为避 免其干扰 , 实际控 在
本 文介绍 的采用单 片机 PCl F 7 A实现 的全 回转 舵 l 6 83 桨 随动 控制 系统 , 其单片机功能强大 。 使得 电路设计简单 、 成 本低 。从 O 4年 、5年新建造出厂的二艘渡轮营运实践来看 , O 其抗 干扰能力强 、 控制 更加可靠 , 也值 得在老全 回转舵桨 的
维普资讯
在回舵控中应 全转桨制的用
摘 要 : 分 析单 片机 的 特 点开 始 , 从 介绍 目前应 用 的一 种抗 干扰
能力强、 控制更加可靠的全回转舵桨随动控制系统。 关键字 : 随动控制 全 回转舵桨 舵角 单片机
郭 顺华
全 回转舵桨装置是一种新型的船舶推进装 置 , 它以桨舵 合 一的方式代替传统 的桨舵推进方式 , 推进螺旋桨 随舵桨 本 体可 以在 3 0度的范围内任意回转 , 6 通过控制推进 螺旋桨 的 各个 回转角度 , 以提 供全方位 的推力 , 可 使船舶 操纵更加 灵 活; 因此对全 回转舵桨最主要的控制就是 回转 角度—— 舵角 的控 制 , 船舶 驾驶人 员要对舵 角实现随心所 欲的 控制 , 控 该 制系统简称为随动控 制系统 。 早期的全 回转舵桨 随动 控制 系统一般 都是通 过 自整角 机 来实现的 , 属于模拟 控制方式。近年来 , 随着 电子技术的飞
构驱动舵桨回转。
现象, 旋转电位器在最 大输 出电压进 入死 区时, 由于 电压 突 变, 会输出干扰信号 , 必须采用软件滤波技术 , 防止 出现误动
作。 在 实际使 用 中, 舵桨 的控 制采用 走近 路 的方式 , 反馈 电
位器 的角度 W2总是 以最近 的方式接近控 制电位器 W1( 即
系 统 原理 框 图 如 图 1 :
图 1
动能 力、 低价 格和 O T技 术等 , P 抗干扰 能 力强 , 有极 高的 具
性价 比, 它代表 了单片机工业的新趋势。 PC系列单 片机分 基本级 、 I 中级 、 高级 三个级别 , 本控制
该系统是带有反馈 装置 的闭环控 制系统 , 制电位 器安 控
跃 发展 ,采用微控 制器 的数 字化控 制技术被越 来越广 泛应 用, 逐渐取代 了原来的模拟 控制方式 。在本文 中介 绍~种渡
系统 中, 在满足舵 角控制精度 的前提 下 , 采用具有 1 4位地址 宽度 的中档型 PC1 F 7 A单片机。 I 683 PC1 F 7 A单 片机 具 有 强大 的 功能 ,内部 有 1 I 683 O位 AD 1 位 F s I 、4 l h程序存储器、 位 E P OM数据存储器、 a 8 2R 捕
控制上进行改造应用。
制中采用光耦和大 功率 固态继电器进 行隔离放大驱动。在 图 2中, 转舵控制信 号由单片机 的 R C6和 R C7口输出 , 经光 电 耦合器 U 4和 U 5隔离后 , 送入固态继 电器 K 1和 K , 2 由固态
继电器直接驱动电磁 阀。
软 件 设 计
系统软件可在 C语言环境下完成 , 程序 中最关键 的是对 双联电位器实现 3 0 死区的数据计算 , 6匠 使用中必须对其上 下联锚开精确的角度 ,否则会出现有一联舵角计算不准确 , 使控制 角度 出现偏差 , 并且在 上下联衔 接点有可 能出现震荡
电位 器数 据采 集
L 1S s.
’
!
计算合成角度 l控制W ,反馈w I 2
一
, 、
,
、
、
L
" - -
、
rj j
/
/
 ̄
◇I Y
— —
i
垄 些I 堑
』
I
。i
I
垄 l 丝 堡些 童堑
I
AD转换 。比较 出电位器 W1 W2的角度偏差 ,由单片机 I 和
捉输入、 比较输 出 、WM 输 出 、 P 内置 WD 、 步串行 通信 、 T异
L D驱动等 , 以大大减少外围器件 , 电路设计更加简单 、 C 可 使 可靠 , 又节省 电路空间和使用成本 。该单 片机具 有强 大的驱 动能力 , 引脚可吸入或提供电流高达 2 m , 以直接驱动小 5 A可
小 于 侣 O度 ) 。
软件流程设计如 图 3 :
控 制 与 驱 动 电路 设 计
1PC1 F 7 A控制电路 .I 6 8 3 图 2所示是 PC1 F 7 A 的控制与 驱动 电路 。 电位 器 I 683 的输 出信 号 电压 S ~S 1 4经 过低通 滤波后 ,送入单 片机 的 R O A 、R 2 A A 、R 1 A 、R 5口 ,在单 片机 内进 行 数 据 采样 ,
5 CW T 2 0 . 6 0 6 6
维普资讯
装在 由驾驶人员操纵的手柄上 , 角反 馈电位器 安装在全 回 舵
转舵桨上 , 与舵桨本体 同步 回转 。控制 电压 和反馈电压经滤 波处理后送入单 片机 .在单 片机 内进 行 AD转换和 角度运 / 算, 然后由单 片机输 出左转或右转 ( 即左舵和右舵 ) 的控制信 号, 经过 隔离驱动 电路 , 控制液压 电磁 阀, 最终 由液压 执行机