PX4_MCU电路图
编码器四倍频细分电路(含波形图)
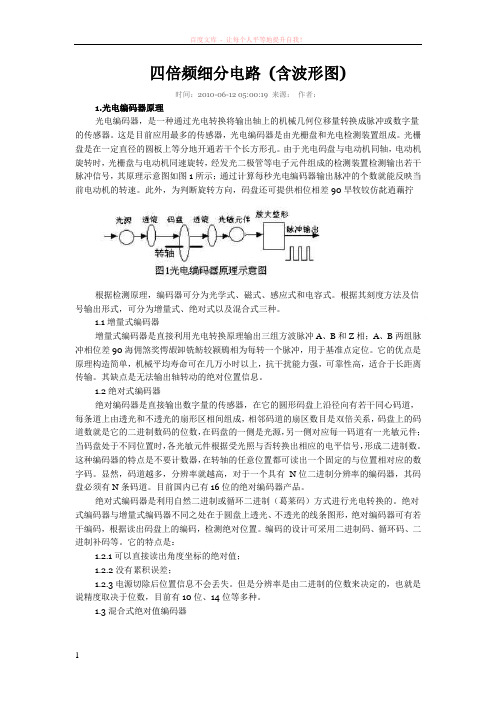
四倍频细分电路(含波形图)时间:2010-06-12 05:00:19 来源:作者:1.光电编码器原理光电编码器,是一种通过光电转换将输出轴上的机械几何位移量转换成脉冲或数字量的传感器。
这是目前应用最多的传感器,光电编码器是由光栅盘和光电检测装置组成。
光栅盘是在一定直径的圆板上等分地开通若干个长方形孔。
由于光电码盘与电动机同轴,电动机旋转时,光栅盘与电动机同速旋转,经发光二极管等电子元件组成的检测装置检测输出若干脉冲信号,其原理示意图如图1所示;通过计算每秒光电编码器输出脉冲的个数就能反映当前电动机的转速。
此外,为判断旋转方向,码盘还可提供相位相差90旱牧铰仿龀逍藕拧根据检测原理,编码器可分为光学式、磁式、感应式和电容式。
根据其刻度方法及信号输出形式,可分为增量式、绝对式以及混合式三种。
1.1增量式编码器增量式编码器是直接利用光电转换原理输出三组方波脉冲A、B和Z相;A、B两组脉冲相位差90海佣煞奖愕嘏卸铣鲂较颍鳽相为每转一个脉冲,用于基准点定位。
它的优点是原理构造简单,机械平均寿命可在几万小时以上,抗干扰能力强,可靠性高,适合于长距离传输。
其缺点是无法输出轴转动的绝对位置信息。
1.2绝对式编码器绝对编码器是直接输出数字量的传感器,在它的圆形码盘上沿径向有若干同心码道,每条道上由透光和不透光的扇形区相间组成,相邻码道的扇区数目是双倍关系,码盘上的码道数就是它的二进制数码的位数,在码盘的一侧是光源,另一侧对应每一码道有一光敏元件;当码盘处于不同位置时,各光敏元件根据受光照与否转换出相应的电平信号,形成二进制数。
这种编码器的特点是不要计数器,在转轴的任意位置都可读出一个固定的与位置相对应的数字码。
显然,码道越多,分辨率就越高,对于一个具有N位二进制分辨率的编码器,其码盘必须有N条码道。
目前国内已有16位的绝对编码器产品。
绝对式编码器是利用自然二进制或循环二进制(葛莱码)方式进行光电转换的。
绝对式编码器与增量式编码器不同之处在于圆盘上透光、不透光的线条图形,绝对编码器可有若干编码,根据读出码盘上的编码,检测绝对位置。
sony_cx4_cs4,__电路原理图2

4 3 2 1 B17 B17 A18 A18 B18 B18 A19 A19 B19 B19 A20 A20 B20 B20 A21 A21 B21 B21 A22 A22 B22 B22 A23 A23 B23 B23 A24 A24 B24 B24 A25 A25 B25 B25 A26 A26 B26 B26 A27 A27 B27 B27 A28 A28 B28 B28 A29 A29 B29 B29 A30 A30 B30 B30 A31 A31 B31 B31 A32 A32 B32 B32 A33 A33 B33 B33 A34 A34
4 3 2 1
CN102 3P WHT :SMD
TEST
32 1 1
S UB + 5 V
COM
31
CN601 (VPL-CX4) 32P FPC :SMD
CN071 3P WHT :SMD CN701 2P RED :SMD
S I RCS - NF GND
2 3
2 3
S I RCS - NF GND
A - GND
A - GND
CN104 70P WHT
A1 A1
A-R
B1 B1 A2 A2 B2 B2 A3 A3 B3 B3 A4 A4 B4 B4 A5 A5 B5 B5 A6 A6 B6 B6 A7 A7 B7 B7 A8 A8 B8 B8 A9 A9 B9 B9 A10 A10 B10 B10 A11 A11 B11 B11 A12 A12 B12 B12 A13 A13 B13 B13 A14 A14 B14 B14 A15 A15 B15 B15 A16 A16 B16 B16 A17 A17
BA
6-2. Schematic Diagrams and Printed Wiring Boards
PIX飞控笔记-第六章:看看PIXHawk的无奈设计

PXI Hawk飞控笔记第六章:看看PXI Hawk的无奈设计——sw笨笨编写1.介绍PX4出了新版,叫做PIXHawk,目前硬件版本2.3。
官方说法是“All in one”,我觉得这是一次彻彻底底的设计回归,从个性回归实用!但是看了他的硬件,我只能说满眼的无奈,全新的器件,过度电源设计,没有MPU6000……一切的一切距离简单实用的设想偏离越来越远,追求高端才是他们的梦想啊,很多设计连商业自驾都望尘莫及!下面我们就从2.3版硬件入手,看看他都选用了那些器件,做了什么改变。
那些是我们应该学习,那些似乎可以抛弃。
当然,在此之前要先浏览一下PIXHawk 的新特征。
2.新的特点1)特性●核心MCU性能:168 MHz / 252 MIPS Cortex-M4F;●输出能力:14 PWM / 舵机输出(其中8个带有失效保护功能,可人工设定。
6个可用于输入,全部支持高压舵机);●大量外设接口(UART,I2C,CAN);●在飞翼模式中,可以使用飞行中备份系统,可设置。
可存储飞行状态等数据;●多余度供电系统,可实现不间断供电;●外置安全开关;●全色LED智能指示灯;●大音量智能声音指示器;●集成microSD卡控制器,可以进行高速数据记录。
2)MCU●32bit,STM32F427,Cortex M4核心,带有浮点运算器;●168 MHz;●256 KB RAM;● 2 MB Flash;●32 bit,STM32F103失效保护控制器。
3)传感器●ST公司小型L3GD20H 16 bit陀螺芯片;●ST公司小型LSM303D 14 bit加速度/磁场芯片;●MEAS公司MS5611气压芯片。
4)通信●5x UART(串口),1个带有高驱动能力,2个带有流控制功能;●2x CAN ,1个带有内置3.3V转换器,另一个需要外置转换器;●支持Spektrum DSM / DSM2 / DSM-X® 输入;●支持Futaba S.BUS®输入;●支持PPM信号输入;●支持RSSI (PWM信号)输入;●I2C;●SPI;● 3.3 and 6.6V ADC电压信号输入;●内置microUSB接口,并可扩展外部microUSB接口。
PX4飞控开发笔记-第五章:PWM、PPM与S.bus
APM for PX4飞控开发笔记第五章:PWM、PPM与S.bus ——sw笨笨编写1.介绍要进行飞控开发,了解控制信号是基本知识。
用于航模的飞控主要的执行设备就是舵机和电调,那么跟舵机相关的信号都有哪些,他们的作用是什么,硬件协议是什么,软件协议是什么,有什么区别,怎么用?这些就是本文下面要跟大家讨论的问题。
我个人常用的航模中的控制信号主要有PWM、PPM和S.bus。
还有许多其他信号,但是个人接触的少就不在这里卖了。
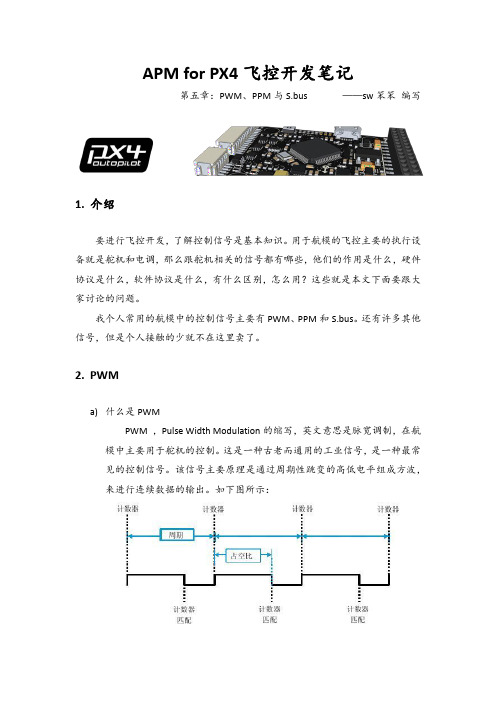
2.PWMa)什么是PWMPWM ,Pulse Width Modulation的缩写,英文意思是脉宽调制,在航模中主要用于舵机的控制。
这是一种古老而通用的工业信号,是一种最常见的控制信号。
该信号主要原理是通过周期性跳变的高低电平组成方波,来进行连续数据的输出。
如下图所示:而航模常用的PWM信号,其实只使用了它的一部分功能,就是只用到高电平的宽度来进行信号的通信,而固定了周期,并且忽略了占空比参数。
PWM的优点很明显:●由于传输过程全部使用满电压传输,非0即1,很像数字信号,所以他拥有了数字信号的抗干扰能力。
●脉宽的调节是连续的,使得它能够传输模拟信号。
●PWM信号的发生和采集都非常简单,现在的数字电路则使用计数的方法产生和采集PWM信号。
●信号值与电压无关,这在电压不恒定的条件下非常有用,比如电池电压会随消耗而降低,DCDC都会存在纹波等等,这些因素不会干扰信号的传输。
b)PWM通信协议高电平有效。
高电平电压:常见4.8~6V,也有使用3.3V和更高电压的,要看舵机的承受能力。
信号周期:常见50Hz和300Hz两种,前者被称为模拟舵机,后者被称为数字舵机。
注意纠正一个概念,舵机的模拟和数字之分其实指的是信号采集器,是使用模拟电路还是使用数字电路,跟信号频率无关,当然数字采集器的采集能力较强,所以频率可以高一些。
但是随着技术进步,现在即使买50Hz 的舵机也同样使用数字电路进行信号采集,哪里来的模拟舵机呢?建议大家忘记这两个词汇吧。
51单片机控制四相步进电机电路图9页word文档

51单片机控制四相步进电机接触单片机快两年了,不过只是非常业余的兴趣,实践却不多,到现在还算是个初学者吧。
这几天给自己的任务就是搞定步进电机的单片机控制。
以前曾看过有关步进电机原理和控制的资料,毕竟自己没有做过,对其具体原理还不是很清楚。
今天从淘宝网买了一个EPSON 的UMX-1型步进电机,此步进电机为双极性四相,接线共有六根,外形如下图所示:拿到步进电机,根据以前看书对四相步进电机的了解,我对它进行了初步的测试,就是将5伏电源的正端接上最边上两根褐色的线,然后用5伏电源的地线分别和另外四根线(红、兰、白、橙)依次接触,发现每接触一下,步进电机便转动一个角度,来回五次,电机刚好转一圈,说明此步进电机的步进角度为360/(4×5)=18度。
地线与四线接触的顺序相反,电机的转向也相反。
如果用单片机来控制此步进电机,则只需分别依次给四线一定时间的脉冲电流,电机便可连续转动起来。
通过改变脉冲电流的时间间隔,就可以实现对转速的控制;通过改变给四线脉冲电流的顺序,则可实现对转向的控制。
所以,设计了如下电路图:C51程序代码为:代码一#include <AT89X51.h>static unsigned int count;static unsigned int endcount;void delay();void main(void){count = 0;P1_0 = 0;P1_1 = 0;P1_2 = 0;P1_3 = 0;EA = 1; //允许CPU中断TMOD = 0x11; //设定时器0和1为16位模式1ET0 = 1; //定时器0中断允许TH0 = 0xFC;TL0 = 0x18; //设定时每隔1ms中断一次TR0 = 1; //开始计数startrun:P1_3 = 0;P1_0 = 1;delay();P1_0 = 0;P1_1 = 1;delay();P1_1 = 0;P1_2 = 1;delay();P1_2 = 0;P1_3 = 1;delay();goto startrun;}//定时器0中断处理void timeint(void) interrupt 1{TH0=0xFC;TL0=0x18; //设定时每隔1ms中断一次count++;}void delay(){endcount=2;count=0;do{}while(count<endcount);}将上面的程序编译,用ISP下载线下载至单片机运行,步进电机便转动起来了,初步告捷!不过,上面的程序还只是实现了步进电机的初步控制,速度和方向的控制还不够灵活,另外,由于没有利用步进电机内线圈之间的“中间状态”,步进电机的步进角度为18度。
PX4飞控源码系统框架介绍

PX4飞控源码系统框架介绍⼀、build_px4fmu-v2_default 编译以后⽣成的⽂件:内部主要需要在意的就是topics_temporary_header(所有的任务是要的头⽂件,在创建任务和使⽤数据结构时可以从该处检索);topics_temporary_sources(系统中所有的任务函数)⼆、Cmake 配置⽂件,主要使⽤ nuttx_px4fmu-v2_default.cmake。
该处主要是关于系统使⽤的⽂件的路径配置,在 PX4 系统所有的.CPP 和.C ⽂件都是通过在该处进⾏路径包含的。
在需要⾃⼰创建私有任务或者 sensor 驱动程序时需要添加到该处。
三、mavlink 主要负责和地⾯站QGC通信的协议部分,这部分可以直接调⽤。
分为1.0版本和2.0版本,以后都更新到2.0版本了四、msg uORB manger 的缩写:msg。
该部分主要是 PX4 系统的使⽤的所有的数据结构的集合部分,各种任务和 sensor 驱动中需要获取的 sensor 数据都在此部分,还包含各种运⾏状态的数据结构。
其中需要注意的是该⽂件夹下的 Cmakelists.txt,该⽂档是整个 msg 部分的配置部分,类似第⼆部分的 Cmake 中的配置⽂件⼀样,在开发者创建任务或者 sensor 驱动程序时创建对应的数据结构(***.msg)以后,需要把开发者创建的***.msg 添加到Cmakelists.txt 中,否则编译时识别不到开发者创建的数据结构。
在该部分创建好以后,直接编译可以⾃动⽣成相对应的 C/C++下的标准头⽂件,即在第⼀部分所介绍的 topics_temporary_header,在 PX4 系统的任何⼀个地⽅引⽤所需要的数据结构,都需要把这个头⽂件包含进去。
五、NuttX PX4 所使⽤的操作系统,其类似 UCos,关于 OS 的基本概念以及够不部分不在详述。
六、ROMFS ROM file_system 的简写,内部的 px4fmu_common ⽂件夹中的 init.d 是关于 px4 系统初始上电启动的启动脚本,即⼀系列的启动过程和系统配置。
Px4源生固件学习笔记

Px4源生固件学习笔记(gps驱动部分)By Jone.海龙Time2017.3.15一、前言最近要往PX4上加入差分GPS,特此看了下GPS驱动相关内容。
二、头文件的宏定义Gps数据获取就是使用串口/dev/ttyS3,在Firmware/Src/drivers下的drv_gps.h文件下定义了GPS数据数据的串口为dev/ttys3。
#define GPS_DEFAUTLT_UART_PORT“/dev/ttys3”也定义了一个gps协议驱动模式的枚举类型Typedef enum{GPS_DRIVER_MODE_NONE=0GPS_DRIVER_MODE_UBXGPS_DRIVER_MODE_MTKGPS_DRIVER_MODE_ASHTECH}gps_driver_mode_t其中UBX、MTK、ASHTECH应该是不同GPS的厂家的协议,分别对应不同的驱动程序。
1)UBX码是u-blox公司UBX就是用串口来控制模块的一种协议,钟对于u-blox的系列产品进行的控制精简代码,输出的代码主要是对模块进行软硬件及功能方面的控制,如模块的冷启动,热启动,温启动,启动模式选择,刷新速率,波特率,定位精度,天线检测等等,均可以通过UBX代码来通过MCU使用COM口来对模块来进行控制,UBX代码可以通过U-center软件来进行选择项目获得相应的代码,通过UBX码的控制,增加了机器的后续产品升级灵活性,可以让客户即使在产品通过网络进行销售之后通过远程升级仍然可以获得不间断的简单升级服务.2)MTK串口有自已封装的一套接口函数,详见Uart_dispatch.c。
驱动原文件在Uart.c。
与WIN32不同的是,MTK所有的串口都在drv_comm.c文件中已经打开过了。
所以在使用的时候,不需要再次打开,MTK采用了一种ower的方式,将串口指定给一个模块。
这样在每次收到数据后,串口都会向指定模块发送一条消息,消息号:MSG_ID_UART_READY_TO_READ_IND。
智能车电路图整理,总结.

(1)驱动电路:以下是BTS 7960全桥的接线电路,同样适用于BTS(BTN)7960 7970等。
BTN比BTS性能更强。
A车用两片做驱动就够了,不需要像下图那样用四片,四片B车模才需要。
BTS7960芯片引脚简绍1脚(GND);2脚(IN)PWM输入-0.3~5.3V;3脚(INH)使能1有效0进入睡眠模式;4脚(OUT)半桥驱动功率输出;5脚(SR)Slew Rate转换速率,通过在SR和GND之间接入一个电阻可以调整转换速率,电阻越大,上升下降越慢;6脚(IS)输出脚电流传感器和故障诊断输出;7脚(VS)VCC供电-0.3~45V。
这是工作原理,可以不看。
BTS7960的芯片内部为一个半桥。
INH引脚为高电平,使能BTS7960。
IN引脚用于确定哪个MOSFET导通。
IN=1且INH=1时,高边MOSFET导通,OUT引脚输出高电平;IN=0且INH=1时,低边MOSFET导通,OUT引脚输出低电平。
SR引脚外接电阻的大小,可以调节MOS管导通和关断的时间,具有防电磁干扰的功能。
IS引脚是电流检测输出引脚。
BTS7960的引脚IS具有电流检测功能。
正常模式下,从IS引脚流出的电流与流经高边MOS管的电流成正比,若RIS=1kΩ,则V=I load/8.5;在故障条件下,从IS引脚流出的电流等于I IS(lim) (约IS4.5mA),最后的效果是IS为高电平。
如图4所示,图(a)为正常模式下IS引脚电流输出,图(b)为故障条件下IS引脚上的电流输出。
BTS7960短路故障实验的实验条件如下:+12.45V电池电压,+5V 电源供电,2.0m短路导线(R=0.2Ω),横截面积为0.75 mm,连接1kΩ电阻和一个发光二极管。
V S与电池正极间导线长1.5m (R=0.15Ω)。
如图5所示,其中V IS是IS引脚对地的电压、V L 是OUT引脚对地电压,I L为发生对地短路故障时,流过BTS7960的短路电流。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
FMU CAN
ALA RM
BOOT
SAFETY
3 - GND 2 - SIGNAL 1 - VCC_5V
1 - VCC_3V3 2 - LED3 3 - SAFETY
3 - GND 2 - RX 1 - TX
1 - POSITIVE 1 - NEGATIVE
Mates 3 pos Hirose DF13 housings Part # DF13-3S-1.25C Crimp terminals Part # DF13-2630SCF (for AWG 26-30 wire)
VDD_5V GND CAN2_TX USART1_TX I2C3_SCL ADC_123_IN10 UART6_TX UART5_TX I2C2_SCL USART2_CTS USART2_TX PPM_INPUT GPIO_EXT2 GND ADC123_IN12
Mates 2 mm header: 3M ''9532230-2000-AR-PR''
BAT
RL1 RL2 AC1 AC2
FMU PRES
SPKT IN
USART2 UART5 USART2
IO
FMU
FMU
5 - GND 4 - CTS 3 - RX 2 - TX 1 - VCC_5V
5 - GND 4 - NC 3 - RX 2 - TX 1 - VCC_5V
5 - GND 4 - CTS 3 - RX 2 - TX 1 - VCC_5V
3 - GND 2 - VCC_5V 1 - PPM / S.BUS IN
3 - GND 2 - VCC_5V 1 – S.BUS OUT
Mates 3-pos servo cable. Solder cables into the holes and connect RC receiver with it. Fits 0.1“ header (both straight and right-angle)
4 - GND 3 - CANL 2 - CANH 1 - VCC_5V
Mates 4 pos Hirose DF13 housings Part # DF13-4S-1.25C Crimp terminals Part # DF13-2630SCF (for AWG 26-30 wire)
FMU I2C3
PX4IO – Input / Output and Servo Module
QUICK START – HARDWARE VERSION 1.3
Description
PX4IO is a power supply and expansion module for the PX4FMU fight management unit. It provides servo outputs, receiver inputs, two solid state relays, two switched and current-limited 5V power outputs and a wide range of additional I/O connectors.
/PX4/Hardware
Features
● 24 Mhz Cortex-M3 I/O multiplexer ● 6.3-18V wide supply in, 5V / 2 A output ● Reverse polarity protection on all power inputs ● 8 high-speed servo outputs (up to 400 Hz) ● PPM, Spektrum and Futaba S.Bus compatible receiver inputs ● 2x 0-40 V, 1 A solid-state relays (MOSFET) ● 2x 5 V, 500mA current-limited, switched 5V power outputs ● Analog port with dividers (differential pressure sensors) ● PX4 Expansion bus ● 50x36x14 mm (1.38x1.97x0.55“), 20g, 30x30 mm M3 mounting
FMU SPI
SPEKTRUM IN
JTAG PADS BOOT
43
FMU CAN
TOP SIDE
RST
DC-DC POWER MODULE
IO USART2
1
5
1
ALARM
2
50 mm
3 1 1
7 4
1
1
1 21 21 21 2 1
RL1 RL2 AC1 AC2
FMU I2C3
10.5 mm
PRES
2 - NO 1-C
2 - NO 1-C
2 - GND 1 - VCC_5V
2 - GND 1 - VCC_5V
Mates 2 pos Hirose DF13 housings Part # DF13-2S-1.25C Crimp terminals Part # DF13-2630SCF (for AWG 26-30 wire)
PX4IO is designed as a failsafe board with a stable codebase. Building custom frmware is only recommended for very advanced users. To develop custom code, follow the PX4FMU/PX4IO toolchain guide at: https://pixhawk.ethz.ch/px4/dev/start
Mates 5 pos Hirose DF13 housings Part # DF13-5S-1.25C Crimp terminals Part # DF13-2630SCF (for AWG 26-30 wire)
1 - VCC_3V3 2 – SPEKTRUM 3 – GND
Mates Spektrum RC receiver cables: JST Part # ZHR-3(P) Crimp terminals Part # SZH-003T-P0.5 (for AWG 28-32 wire)
RC Receiver PPM sum input or S.Bus input
42
High-speed Servo Outputs
7-18V, 2A Power in S.Bus out
BAT SERVOS 1-8
1
SIGNAL +5V GND
8
PPM
VCC GND
SBUS 9.n Hardware License
PX4IO is an open hardware design, following the OSHW 1.1 defnition licensed under the Creative Commons Attribution-ShareAlike 3.0 Unported (CC BY-SA 3.0) license. PX4IO uses the NuttX RTOS as software stack (). UNLESS OTHERWISE MUTUALLY AGREED TO BY THE PARTIES IN WRITING, LICENSOR OFFERS THE WORK AS-IS AND MAKES NO REPRESENTATIONS OR WARRANTIES OF ANY KIND CONCERNING THE WORK, EXPRESS, IMPLIED, STATUTORY OR OTHERWISE, INCLUDING, WITHOUT LIMITATION, WARRANTIES OF TITLE, MERCHANTIBILITY, FITNESS FOR A PARTICULAR PURPOSE, NONINFRINGEMENT, OR THE ABSENCE OF LATENT OR OTHER DEFECTS, ACCURACY, OR THE PRESENCE OF ABSENCE OF ERRORS, WHETHER OR NOT DISCOVERABLE. SOME JURISDICTIONS DO NOT ALLOW THE EXCLUSION OF IMPLIED WARRANTIES, SO SUCH EXCLUSION MAY NOT APPLY TO YOU.
7 - GND 6 - NC 5 - SPI2_NSS 4 - SPI2 MOSI 3 - SPI2_MISO 2 - SPI2_SCK 1 - VCC_5V
Mates 7 pos Hirose DF13 housings Part # DF13-7S-1.25C Crimp terminals Part # DF13-2630SCF (for AWG 26-30 wire)
UART5
USART2
3
1
5
15
1
3.0 mm
FMU
FMU
FMU
31
36 mm
RL1&2: Solid state relay AC1&2: 5V switched supply
Ø 3.1 mm (M3)
Pinout and Absolute Maximum Ratings
● Input: 6.3-18 V (BAT connector), max current: 2.5 A ● Accessory outputs: 5 V, each 500mA current limited ● Peripherals output: 5 V, 0.5 A current limited ● Servo Output: 5V, 1.0 A current limited ● NOT compatible per default with high-voltage servo systems providing more than 5V on the servo rail (remove L1 for high voltage systems and supply 6.5V on J16)