CAN-File-10-10-08-13-约束优化_理论
g2o优化算法原理
g2o优化算法原理一、引言g2o是一种用于非线性优化问题的开源优化算法库,可以高效地求解大规模的非线性优化问题。
其主要应用于计算机视觉和机器人领域,用于求解SLAM(Simultaneous Localization and Mapping)问题、图像配准、3D重建等任务。
本文将介绍g2o优化算法的原理和主要特点。
二、非线性优化问题非线性优化问题指的是目标函数为非线性函数,约束条件也可以是非线性函数的优化问题。
这类问题的求解通常需要迭代的方法,通过不断更新参数值来逼近最优解。
相较于线性优化问题,非线性优化问题更加困难,因为目标函数可能存在多个局部最优解。
三、g2o优化算法原理g2o算法采用了图优化的思想,将优化问题转化为图的形式进行求解。
图由一系列的节点和边构成,节点表示优化变量,边表示优化问题中的约束关系。
g2o算法通过最小化节点和边之间的误差来求解最优的节点变量值。
1. 节点在g2o中,节点表示优化问题中的变量,例如机器人的位姿或地图的点。
每个节点都有一个维度,维度的选择取决于问题的具体情况。
节点的值会随着优化的进行而不断更新,直到达到最优解。
2. 边边表示优化问题中的约束关系,例如两个节点之间的相对位姿关系。
每个边都有一个维度,维度的选择也取决于问题的具体情况。
边的值是通过测量或计算得到的,它将节点之间的关系转化为数值形式。
3. 误差函数误差函数用于衡量节点和边之间的差异,即节点和边之间的约束关系的误差。
g2o算法通过最小化误差函数来求解最优的节点变量值。
常见的误差函数包括平方误差函数和Huber损失函数等。
4. 优化过程g2o算法通过迭代的方式逐步更新节点变量的值,直到达到最优解。
每一次迭代都会更新节点和边的值,并计算新的误差函数。
根据误差函数的大小,算法会调整节点变量的值,使误差函数逐渐减小。
这个过程会重复多次,直到达到收敛条件。
五、g2o优化算法的特点g2o优化算法具有以下几个特点:1. 高效性:g2o算法采用了稀疏矩阵的数据结构,能够高效地处理大规模的优化问题。
优化与防止被优化
注册登录•论坛•搜索•帮助•导航SoC Vista -- IC/FPGA设计家园» 30分钟必答 - 无限制提问专区» 设计未完成阶段进行面积评估如何防止被优化12下一页返回列表回复发帖mentor00超级通吃版主1#打印字体大小: t T发表于 2009-11-8 09:48 | 只看该作者设计未完成阶段进行面积评估如何防止被优化(本文来自anthonyyi的来信。
请大家一起来解答。
)为了对整个设计进行性能和面积的评估在模块尚未全部完成的阶段进入FPGA综合阶段在顶层设计中instance了所有已完成的模块但这些模块中有的由于后续模块没有完成,其输出悬空,即没有load在Synplify下使用Syn_noprune属性发现在compile阶段能保留上述模块,其RTL view显示模块存在在map之后观测Technology view发现上述模块已经被优化掉只剩下输入端口,且无drive故综合报告无实际意义和参考价值想请教在如何不改变顶层模块的输出管脚而使综合保留上述无输出的模块个人想到一种,用syn_probe将输出net probe出来,但这样会有风险因为综合工具似乎只会保留这些与该输出有关的逻辑而优化掉其他的部分而且该步骤没有进行实战确认:(本主题由 admin 于 2009-12-2 07:56 加入精华收藏分享评分回复引用订阅 TOPmentor00超级通吃版主2#发表于 2009-11-8 10:04 | 只看该作者我想可以参考一下下面的转载内容提问:我使用的是synplify pro综合verilog语言,例化了一个BUF,在综合结果里也看到了这个BUF,但是在MAP是这个BUF还是被优化掉了,请问用什么方法将这个BUF保留下来?解答:在这个BUF两端的信号线上加上下面的属性——wire bufin /* synthesis syn_keep=1 xc_props="X" */;wire bufout /* synthesis syn_keep=1 xc_props="X" */;解释下:1、syn_keep=1就是保留这个信号线,是它成为一个instance(synplify的),然后就可以对它添加XILINX的约束属性;2、xc_props=“”是synplify为XILINX保留留的约束属性,可以透传到ISE的实现中去,从而约束实现过程。
CAN-File-10-10-08-13-线性规划_网络流与整数规划解析

目标:
第04章 线性规划: 网络流和整数规划
实用优化方法
数学与系统科学学院
网络流问题-续
约束:
质量守恒(mass conservation) inflow(k) – outflow(k)=demand(k)=-supply(k), 假定II:弧没有容量限制
如果他们全非负,当前树解是最优的;否则,选取弧 (i, j) 使得 ,称之为入弧. Step 4. 确定出弧:入弧和树弧必形成一个圈. 如果圈中的所 有弧和入弧同向,则最优费用是 -∞,终止算法. 否 则,在与入弧反向的树弧中选一个最小的流作为出弧. Step 5. 转轴: 在当前树解中用入弧代替出弧,更新原始流,得 新的树解. 转 Step2.
第04章 线性规划: 网络流和整数规划 实用优化方法
数学与系统科学学院
(用于无容量限制网络的)网络单纯形法:
Step 1. 从一个可行的树解开始,假设第 n 个节点是根节点. Step 2. 计算对偶向量(单纯形乘子): 从根节点向叶子节点,依次求解方程组
Step 3. 计算对偶松弛向量(相对费用系数/既约费用系数):
连 通
第04章 线性规划: 网络流和整数规划 实用优化方法
不连通
数学与系统科学学院
定义:圈 vs. 非圈(Cyclic vs. Acyclic)
圈
第04章 线性规划: 网络流和整数规划 实用优化方法
非 圈
数学与系统科学学院
定义:树(Trees)
树=连通的+非圈
非 树
第04章 线性规划: 网络流和整数规划
非负性
第04章 线性规划: 网络流和整数规划
实用优化方法
CAN总线的双机冗余系统设计
课程设计(论文)任务及评语院(系):电气工程学院 教研室:自动化 注:成绩:平时20% 论文质量60% 答辩20% 以百分制计算学 号学生姓名 专业班级 课程设计(论文)题目CAN 总线的双机冗余系统设计 课程设计(论文)任务课题完成的功能、设计任务及要求、技术参数 实现功能CAN 总线的双机冗余系统设计,使在出现故障时能自动切换,保证系统安全、稳定运行。
设计硬件包括总线控制器、总线收发器及ATMEL 系列单片机及切换逻辑等。
软件采用汇编语言或C 语言,并调试与分析。
设计任务及要求1、确定设计方案,画出方案框图。
2、冗余系统硬件设计,包括元器件选择。
3、画出硬件原理图。
4、绘出程序流程图,并编写初始化、接收及发送程序。
5、要求认真独立完成所规定的全部内容;所设计的内容要求正确、合理。
6、按学校规定的格式,撰写、打印设计说明书一份;设计说明书应在4000字以上。
技术参数1、符合CAN2.0B 规范;2、40米内最高可达1Mbit/s ;(设计选定传输速率为125K bit/s )3、可扩充110个节点;进度计划1、布置任务,查阅资料,确定系统设计方案(2天)2、系统硬件设计及模块选择(3天)3、系统软件设计及编写功能程序及调试(3天)4、撰写、打印设计说明书(1天)5、验收及答辩。
(1天) 指导教师评语及成绩 平时: 论文质量: 答辩: 总成绩: 指导教师签字: 年 月 日摘要CAN总线的高性能和可靠性已被认同,并被广泛地应用于工业自动化、船舶、医疗设备、工业设备等方面。
现场总线是当今自动化领域技术发展的热点之一,被誉为自动化领域的计算机局域网。
它的出现为分布式控制系统实现各节点之间实时、可靠的数据通信提供了强有力的技术支持。
随着功能强大的单片机在控制领域应用的不断深入,容错控制系统也在不断地发展,在一些特定的场合下,如在航空航天、军事、铁路、石油、化工、电力等重要部门和在恶劣工作环境下工作的计算机控制系统,对系统安全性、可靠性、可用性的要求更高。
can节点层级结构

can节点层级结构1.引言1.1 概述在撰写本文时,我们将关注于节点层级结构。
节点层级结构是一种常见且重要的数据结构,它在各个领域广泛应用,并且在计算机科学中扮演着至关重要的角色。
节点层级结构是由节点组成的层次化结构。
每个节点都可以包含一个父节点和多个子节点,形成一个树状结构。
这种层级的关系使得我们能够快速索引和组织数据,同时也方便了数据的查找和操作。
节点层级结构具有许多特点,其中最重要的一点是它的灵活性。
通过层级结构,我们可以将数据组织成不同的层级和子层级,使得数据之间的关系更加清晰明了。
这种灵活性使得节点层级结构成为了一种理想的数据组织方式,被广泛运用于数据库、文件系统、网站导航等场景。
另外,节点层级结构还具有良好的可扩展性和可维护性。
当我们需要添加、删除或修改数据时,只需对特定的节点进行操作,而无需对整个结构进行调整。
这种特点使得节点层级结构在应对大规模数据和频繁变动的情况下表现出色。
总而言之,节点层级结构是一种强大而灵活的数据结构,它在现代计算机科学中发挥着重要作用。
接下来的篇章中,我们将进一步探讨节点层级结构的定义、特点以及其在不同领域中的应用。
希望通过本文的阐述,能够对节点层级结构有更深入的理解,并为其未来的发展提供一些展望。
文章结构部分的内容如下:1.2 文章结构本文主要围绕"can节点层级结构"展开,结构如下所示:引言部分:介绍本篇文章的背景和意义。
第一段概述can节点层级结构的重要性以及它在实际应用中的广泛应用。
第二段介绍本文的结构,包括节点层级结构的定义、特点,总结节点层级结构的重要性,以及展望节点层级结构的未来发展。
正文部分:详细介绍can节点层级结构的定义和特点。
第一段解释can 节点层级结构的定义,包括其基本概念和组成部分。
第二段探讨can节点层级结构的特点,如灵活性、可扩展性和易于维护等。
结论部分:对can节点层级结构的重要性进行总结,并展望其未来发展。
mpc中的优化算法
mpc中的优化算法MPC中的优化算法: 从理论到应用引言:Model Predictive Control(MPC)是一种广泛应用于工业自动化领域的控制策略。
它通过对系统模型进行预测,并通过优化算法来选择最优控制策略。
本文将介绍MPC中常用的优化算法,并探讨其在实际应用中的一些挑战和解决方案。
一、线性二次规划(Linear Quadratic Programming,LQP)线性二次规划是MPC最常用的优化算法之一。
它通过最小化代价函数来选择最优控制策略,同时满足系统的动态方程和约束条件。
LQP算法具有计算效率高、收敛性好等优点,适用于许多实际控制问题。
二、非线性规划(Nonlinear Programming,NLP)当系统模型具有非线性特性时,MPC需要使用非线性规划算法来求解最优控制策略。
NLP算法通过迭代优化过程,逐步逼近最优解。
然而,由于非线性规划问题的复杂性,NLP算法的计算量较大,需要高效的数值求解方法。
三、多目标优化算法在某些应用中,MPC需要同时优化多个目标函数,如最小化能耗和最大化生产效率。
这时,多目标优化算法可以用来解决这类问题。
常用的多目标优化算法有遗传算法、粒子群算法等。
这些算法通过搜索解空间的不同位置,找到一组最优解,满足不同的目标需求。
四、鲁棒优化算法在实际应用中,系统模型通常存在不确定性和扰动。
鲁棒优化算法可以在系统不确定性较大时,保证控制性能的稳定性和鲁棒性。
这类算法通常使用鲁棒约束和鲁棒代价函数来处理不确定性,以保证控制器在各种不确定情况下都具有良好的性能。
五、混合整数优化算法有些应用中,MPC需要考虑离散控制变量,如开关状态等。
混合整数优化算法可以用来求解这类问题。
它将连续变量和离散变量结合起来,通过搜索整数解空间,找到最优解。
然而,由于整数优化问题的NP难度,混合整数优化算法通常需要进行适当的求解策略和剪枝操作。
六、并行优化算法随着计算机硬件的发展,MPC中的优化算法可以利用并行计算的优势来提高计算效率。
sequential model-based optimization
sequential model-based optimization基于序列模型的优化(Sequential Model-Based Optimization,简称SMBO)是一种优化算法,广泛应用于超参数调优、机器学习模型优化等领域。
本文将深入介绍SMBO的基本原理、工作流程以及在实际问题中的应用,帮助读者更好地理解和运用这一强大的优化方法。
第一:SMBO基本原理1.优化问题定义:SMBO通常用于解决优化问题,这类问题的目标是找到使某个目标函数最大或最小的输入参数组合。
这些输入参数称为超参数。
2.目标函数:优化的核心是目标函数,它是一个将超参数映射到某个性能指标(目标值)的函数。
在超参数空间中寻找最优解即是在目标函数上寻找全局最大或最小值。
3.贝叶斯优化:SMBO的基础是贝叶斯优化,它使用先验模型(通常是高斯过程)来估计目标函数,并在每次迭代中更新模型。
第二:SMBO工作流程1.初始采样:初始阶段,SMBO通过在超参数空间中随机采样一组点来建立初始的训练数据。
这些采样点用于训练初始的先验模型。
2.迭代优化:–模型训练:利用初始采样得到的数据,建立一个先验模型,通常是高斯过程模型。
–采样与评估:通过在先验模型上使用某种采样策略(如期望最大化、随机采样等),得到下一个超参数点,将该点传递给目标函数进行评估,获得对应的目标值。
–更新模型:将新的采样点与其目标值加入训练数据,更新先验模型。
–迭代:重复上述步骤,不断迭代,逐步优化先验模型,直至达到停止条件。
第三:SMBO的关键要素1.先验模型:先验模型是SMBO的核心组成部分,通常选择高斯过程作为先验模型。
该模型不仅提供对目标函数的估计,还提供对不确定性的估计。
2.采样策略:采样策略定义了如何在先验模型上选择下一个采样点。
一些常见的策略包括期望最大化(Expected Improvement)、置信区间最大化等。
3.停止条件:定义SMBO的停止条件非常重要,通常可以基于迭代次数、目标值的收敛程度等因素来确定。
nmpc原理
nmpc原理一、NMPc概述NMPc是非线性模型预测控制(Nonlinear Model Predictive Control)的简称,它是一种基于模型的控制方法,可以用于处理非线性、多变量、时变、约束条件等复杂系统的控制问题。
NMPc通过预测未来一段时间内的系统状态和输出,并在此基础上计算出最优控制输入,从而实现对系统的控制。
二、NMPc原理1. 系统建模NMPc首先需要建立一个数学模型来描述被控制的系统,通常采用微分方程或差分方程进行描述。
这个数学模型可以是线性或非线性,也可以是离散或连续的。
在建立模型时需要考虑到系统的动态特性、输入输出关系以及约束条件等因素。
2. 预测优化在NMPc中,预测优化是核心环节之一。
它通过对未来一段时间内系统状态和输出进行预测,并在此基础上计算出最优控制输入。
这个过程通常包括两个步骤:预测和优化。
(1) 预测预测是指根据当前时刻的状态和输入,利用系统模型对未来一段时间内的状态和输出进行预测。
这个过程通常采用数值方法进行求解,比如欧拉法、龙格-库塔法等。
(2) 优化优化是指利用预测结果计算出最优控制输入,使得系统在未来一段时间内能够满足性能指标和约束条件。
这个过程通常采用数学优化方法进行求解,比如线性规划、二次规划等。
3. 控制实现NMPc的控制实现包括两个部分:控制器设计和控制律计算。
(1) 控制器设计控制器设计是指根据系统模型和预测优化结果,设计一个能够实现最优控制输入的反馈控制器。
这个过程通常采用状态反馈或输出反馈的方式进行设计。
(2) 控制律计算控制律计算是指根据控制器设计的结果,计算出最终的控制律。
这个过程通常采用线性矩阵不等式(LMI)方法进行求解。
三、NMPc应用NMPc可以应用于多种复杂系统的控制问题,比如化工过程、机械系统、电力系统等。
其中,NMPc在化工过程中的应用较为广泛。
例如,在精细化工生产中,NMPc可以通过对反应动力学模型进行建模和优化,实现对反应过程的控制。
cangen 参数

cangen 参数1.引言1.1 概述概述Cangen参数是一种用于评估和优化遗传算法性能的重要指标。
遗传算法是一种模拟自然选择和遗传机制的优化算法,广泛应用于解决复杂的优化问题。
Cangen参数的具体定义和计算方法主要依赖于遗传算法的具体实现方式和应用场景。
在本文中,我们将介绍Cangen参数的基本概念和相关理论,以及在实际应用中的意义和应用案例。
Cangen参数是对遗传算法性能的评估指标,它可以衡量遗传算法在搜索空间中的搜索能力、搜索速度和搜索质量。
通过对Cangen参数的分析和优化,可以提高遗传算法的收敛速度和收敛精度,从而提高算法的整体性能。
Cangen参数在遗传算法领域中具有广泛的应用。
例如,在函数优化问题中,Cangen参数可以用于衡量遗传算法对于不同函数的收敛速度和收敛精度;在组合优化问题中,Cangen参数可以用于衡量遗传算法对于不同解空间的搜索能力和搜索质量。
此外,Cangen参数还可以用于比较不同遗传算法的性能和进行算法参数的选择。
本文将通过对Cangen参数的介绍和分析,探讨Cangen参数在遗传算法中的作用和应用,以及它对算法的改进和优化的价值。
首先,我们将介绍Cangen参数的基本概念和定义,然后通过实例分析Cangen参数在不同领域中的应用情况。
最后,我们将总结Cangen参数的重要性,并对其未来的发展进行展望。
通过本文的阅读,读者可以更加深入地了解和掌握Cangen参数的概念和应用,从而能够在实际问题中灵活运用和优化遗传算法的性能。
同时,本文的研究和结论对于进一步推动遗传算法的发展和应用也具有一定的指导意义。
1.2 文章结构2. 正文2.1 Cangen 参数介绍2.2 Cangen 参数的应用在本篇文章中,我们将围绕着cangen 参数展开讨论。
首先,在本节中,我们将介绍文章的结构,以便读者更好地理解本文的内容。
2.1 文章结构本文将分为三个主要部分进行阐述:引言、正文、结论。
最优化理论在智能决策与控制中应用
最优化理论在智能决策与控制中应用智能决策与控制是指利用人工智能和自动化技术,通过对大量数据的分析和处理,为问题的解决提供最佳化方案。
而最优化理论作为一种数学工具,可以有效地应用于智能决策与控制系统中,以提高系统的性能和效率。
本文将从最优控制、最优化算法和智能决策与控制系统中最优化应用三个方面探讨最优化理论在智能决策与控制中的应用。
一、最优控制最优控制是最优化理论在控制系统中的应用。
它通过数学模型和优化算法,寻找给定系统的最优控制策略,以最大程度地满足系统的性能要求。
最优控制的关键是确定目标函数和约束条件,以及选择适当的优化算法。
在智能决策与控制系统中,最优控制可以用来解决各种实际问题。
例如,在供应链管理中,可以利用最优控制模型来确定最佳的物流路线和配送策略,以降低成本和提高效率。
在机器人控制中,可以利用最优控制模型来规划机器人的运动轨迹和操作方式,以实现高效的任务执行。
在交通控制中,可以利用最优控制模型来调控交通信号和车流,以优化交通流量和减少拥堵。
二、最优化算法最优化算法是最优化理论的核心内容,它致力于寻找给定问题的最优解。
常见的最优化算法包括线性规划、非线性规划、整数规划、动态规划等。
在智能决策与控制系统中,最优化算法的应用非常广泛。
例如,在机器学习中,可以利用最优化算法来训练模型的参数,以使模型的预测误差最小化。
在数据挖掘中,可以利用最优化算法来发现大规模数据集中的隐藏模式和规律。
在优化调度中,可以利用最优化算法来分配资源和任务,以提高生产效率和降低成本。
三、智能决策与控制系统中的最优化应用智能决策与控制系统中的最优化应用主要涉及到决策和控制两个方面。
在决策方面,最优化可以帮助系统做出最佳的决策,以满足系统的目标和要求。
在控制方面,最优化可以帮助系统选择最佳的控制策略,以实现系统的稳定性和优化性能。
在智能决策中,最优化可以用来优化决策模型和评估指标。
例如,在股票投资中,可以利用最优化模型来确定最佳的投资组合,以实现最大的收益和最小的风险。
考虑工艺约束的多阶耦合集成调度问题优化
考虑工艺约束的多阶耦合集成调度问题优化在现代制造业中,生产过程常常涉及多个工序和多个机器之间的耦合关系。
优化这种多阶耦合集成调度问题对于提高生产效率、降低成本具有重要意义。
本文将探讨考虑工艺约束的多阶耦合集成调度问题的优化方法。
一、问题描述多阶耦合集成调度问题是指在具有多个工序和多个机器的制造环境中,如何安排任务的调度顺序和机器的分配,以最大化生产效率并满足工艺约束条件。
在这个问题中,每个任务都有一个工序流程,并且需要按照工序的先后顺序进行加工。
每个工序需要使用一台机器,并且每台机器每个时间只能处理一个任务。
二、优化方法为了解决多阶耦合集成调度问题,可以采用以下优化方法:1. 遗传算法(Genetic Algorithm):遗传算法是一种模拟自然选择和遗传机制的优化算法。
可以利用遗传算法对任务的调度顺序和机器的分配进行搜索优化,找到最佳的调度方案。
2. 蚁群算法(Ant Colony Optimization):蚁群算法模拟了蚂蚁在寻找食物过程中的行为。
可以利用蚁群算法对任务的调度顺序和机器的分配进行优化搜索,寻找最优的调度方案。
3. 粒子群算法(Particle Swarm Optimization):粒子群算法模拟了鸟群寻找食物的行为。
可以利用粒子群算法对任务的调度顺序和机器的分配进行搜索优化,找到最佳的调度方案。
三、工艺约束考虑在多阶耦合集成调度问题中,还需要考虑工艺约束条件。
工艺约束是指在任务加工过程中,存在一些严格的限制条件,如任务之间的依赖关系、机器的可用性和资源限制等。
为了满足这些约束条件,可以采用以下策略:1. 先来先服务(First-Come-First-Serve)原则:根据任务的到达顺序,先来的任务先加工。
这种方法简单直观,但可能导致任务的等待时间较长,影响生产效率。
2. 最小松弛度调度(Minimum Slack Scheduling):根据任务的工期和工期的余裕时间来进行调度。
模型预测控制的参数优化
模型预测控制的参数优化模型预测控制(Model Predictive Control,MPC)是一种基于数学模型的高级控制方法,通过预测模型对系统进行模拟预测和优化求解,实现对系统的精确控制。
不同模型预测控制的应用领域广泛,例如工业过程控制、机器人、交通系统等。
为了获得最佳控制效果,参数优化是MPC中非常重要的一环。
MPC的基本原理是通过建立系统模型来预测系统未来的行为,并根据预测结果选择最佳控制信号。
为了实现最佳控制,需要优化一些关键参数,这些参数包括:1.预测模型参数:优化预测模型参数是实施MPC的首要任务。
预测模型可以是线性或非线性的,参数优化的目标是使得预测模型能够最准确地描述系统的行为。
对于线性模型,常用的优化方法是最小二乘法,通过最小化预测误差来优化模型参数。
对于非线性模型,可以使用最优化算法,例如梯度下降法或遗传算法等。
2.控制器权重:MPC中的控制器权重是用来平衡各个控制目标的重要参数。
例如,在工业过程控制中,可能需要同时优化温度、压力和流量等多个目标。
优化权重可以根据不同目标的重要性来分配,以实现最佳控制效果。
权重的优化可以通过试错法或者通过经验法则来获得。
3.控制时域:控制时域是指每次控制操作的时间长度。
控制时域的选择需要考虑到系统的动态响应和计算复杂性。
较短的时域可以提高控制的灵敏度和准确性,但同时也会增加计算负担。
较长的时域可以降低计算负担,但可能导致控制器的响应时间较慢。
因此,控制时域的选择需要进行权衡和优化。
4.约束参数:约束参数是限制系统操作的条件。
在MPC中,常常会对系统状态、输入信号和输出信号等进行约束。
约束参数的优化是为了确保系统操作在安全和合理的范围内,例如保持输入信号在一定范围内、确保状态变量不会超过设定范围等。
约束参数的优化可以通过调整约束边界或者动态更新来实现。
总之,模型预测控制的参数优化是提高MPC控制效果的重要任务。
参数优化的目标是实现系统的最优控制,同时考虑到系统的动态响应、计算复杂性和约束条件等方面的综合因素。
CAN-File-10-03-11-11-1凸集与凸函数
第1讲 凸集与凸函数
凸集
第1讲 凸集与凸函数
优化理论
数学与系统科学学院
第1讲 凸集与凸函数
优化理论
数学与系统科学学院
定义
称 中的集合 C 是凸的(convex),如果对每个 x, y 及每
个
,点
.
几何解释:连接集合中任两点的线段仍含在该集合中
性质
称集合C是锥(cone),如果
蕴含着对所有
有
. 若锥 C 还是凸的,称为凸锥(convex cone).
分离闭凸集 C 和非零向量
.
是空集当且仅当存在
使得
第1讲 凸集与凸函数
优化理论
数学与系统科学学院
推论.
给定 中的向量
.
集合
是空集当且仅当存在 使得
第1讲 凸集与凸函数
优化理论
数学与系统科学学院
凸函数
第1讲 凸集与凸函数
优化理论
数学与系统科学学院
定义
定义
相关定义:严格凸函数、凹函数/严格凹函数 命题. 若fi(x), i=1,…,m,是凸集 K 上的凸函数,则它们的非 负线性组合仍然是K上的凸函数. Jensen不等式:见作业1.10
第1讲 凸集与凸函数
优化理论
数学与系统科学学院
一些重要的凸集
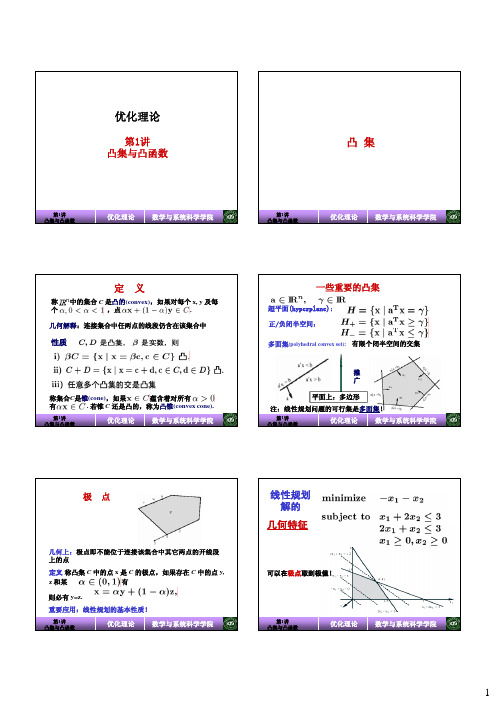
超平面(hyperplane): 正/负闭半空间: 多面集(polyhedral convex set): 有限个闭半空间的交集
推 广
平面上:多边形
注:线性规划问题的可行集是多面集!
第1讲 凸集与凸函数
优化理论
数学与系统科学学院
极点
几何上:极点即不能位于连接该集合中其它两点的开线段 上的点
网联汽车CANFD信号打包优化设计方法研究
在国内,针对CANFD信号打包优化设计的研究起步较 晚,但已经逐渐得到了重视。一些高校和科研机构正在 开展相关研究,并取得了一些初步成果。例如,一些研 究者提出了基于贪婪算法的打包算法,通过优化信号的 传输顺序来降低传输延迟;另外,还有一些研究者提出 了基于动态规划的打包算法,通过优化信号的打包策略 来提高信号可靠性。
研究展望
总结词
研究展望指出了未来研究方向和可能的改进方向,包括 进一步优化数据传输、增强网络安全性和提高系统稳定 性等方面。
详细描述
本研究虽然取得了一定的成果,但仍存在一些不足之处 ,如优化方案仅针对特定场景、未考虑网络拥堵等问题 。未来研究可以针对这些问题进行深入探讨,提出更加 全面和有效的优化方案。同时,随着网联汽车的快速发 展,网络安全和系统稳定性等问题也将变得越来越重要 。因此,未来研究可以加强网联汽车网络安全和系统稳 定性的研究,为网联汽车的广泛应用提供更加可靠的技 术支持。
实时性表现
通过优化设计,该品牌网联汽车的CANFD信号传输速度 得到了显著提升,有效降低了传输延迟,提高了车辆的 实时性能。
可靠性表现
在优化设计中,该品牌还考虑了信号的可靠传输,采用 了多重校验和错误修复机制,确保了信号的稳定性和可 靠性。
应用案例二
跨平台兼容性
该品牌网联汽车在信号打包优化设计时,充分考虑了跨平台兼容 性问题,采用了标准化接口和协议,实现了与其他品牌车辆的互 联互通。
模型优化
根据分析结果,对数学模型进行优化,提出一种基于信 息熵和冗余度的加权函数,以实现更优的信号打包效果 。
CANFD信号打包优化设计的算法实现
算法设计
基于优化后的数学模型,设计CANFD信号 打包优化算法,包括信号分段、压缩编码、 打包传输等步骤。
智能控制技术-第十三课鲁棒优化

生活中的多目标优化问题
例子: 买衣服:希望质量好,价格低
投资理财:希望收益高,风险小
淘宝买商品:同样的商品,在一定的情况下买最便宜的。价格便 宜,购买风险小。
f1为商品质量;f2为商品价格
质量差
质量好 价格便宜
价格贵
多目标优化问题
几乎现实世界中的所有问题都存在多个目标,而这些目标通 常是相互冲突,相互竞争的。一个目标的改善往往同时引起其 他目标性能的降低。也就是说,不存在使各目标函数同时达到 最优的解,而只能对他们进行协调和折衷处理。
m s.ti.n f2f((x x )) g ((fx 1 2 (,x .1 ..),,x fn 2 )(x h )()f1(x1),g(x2,...,xn))
其中,ZDT1函数的Pareto前沿是凸的并且是连续的,其具体如 下式所示:
gf1((xx21,)...,
x1 xn)
19
x n
i2 i
课程结束,谢谢大家!
此时称p为非支配的,q为被支配的。
l { 1 ,2 , ,r } ,使 f l( p ) f l( q )
支配关系
其中1、2、3、4代表四个可行解,点4表示的解支配点1、2、 3所表示的解,点2、3所表示的解均支配点1表示的解;点2 与点3所表示的解彼此不相关。
Pareto 边界
非劣解又称为Pareto最优解,多目标优化问题有很多个 Pareto最优解,解决多目标优化问题的关键在于获得有这 些Pareto最优解组成的集合。Pareto 最优解集在解空间 中往往会形成一条边界线(超平面),又叫front。
gi (x) 0
x(x1,x2,...,xD)X y(y1,y2,...,yk)Y
S = { x R q |g i( x ) 0 ,i= 1 , 2 , ,m }
约束优化算法的关键技术研究及应用

约束优化算法的关键技术研究及应用约束优化算法是一种解决带有约束条件的优化问题的方法。
在许多实际应用中,我们需要在满足一定约束条件的情况下找到最优的解决方案。
本文将介绍约束优化算法的关键技术研究和应用,并且将详细阐述其中几个重要的算法。
约束优化问题更具有挑战性,因为既要在满足约束条件的范围内解空间,又要找到全局最优解。
以下是约束优化算法的关键技术研究和应用:1.约束处理技术:在约束优化问题中,对约束条件的处理是非常关键的。
一种常用的方法是将约束条件转化为罚函数,将违反约束的解惩罚,而不使其进入空间。
另一种常用的方法是采用预处理技术,通过削减解空间来减少约束条件的考虑。
2.高效的策略:在寻找最优解时,需要采用高效的策略。
常见的策略包括遗传算法、禁忌、蚁群算法等。
这些算法通过引入随机性和启发式信息,能够有效地在解空间中到较优的解。
3.优化算法融合技术:将不同的优化算法进行融合,能够提高求解效率和精度。
例如,遗传算法和模拟退火算法的融合可以在全局和局部之间进行切换,以充分利用两种算法的优点。
4.约束满足技术:约束满足技术是约束优化算法中的重要要素之一、它通过检查每个生成的解是否满足约束条件,从而筛选掉不满足约束的解。
常见的约束满足技术包括约束传播和剪枝等。
5.多目标优化技术:在一些实际问题中,存在多个目标需要优化。
多目标优化技术能够同时考虑多个目标,出一组最优解的集合,形成一个帕累托前沿。
常见的多目标优化技术包括遗传算法和多目标粒子群优化算法等。
1.工程设计:在工程设计中,约束优化算法可以帮助工程师找到满足各种约束条件的最优设计方案。
例如,在飞机设计中,需要同时考虑飞行性能、结构强度和燃料消耗等多个方面。
2.网络优化:在网络优化中,约束优化算法可以帮助优化网络拓扑、资源分配和流量控制等问题。
例如,在无线通信网络中,需要优化传输速率、信号质量和功耗等多个指标。
3.金融风险管理:在金融风险管理中,约束优化算法可以用于优化投资组合、风险控制和资产配置等问题。
最优化控制理论在飞行控制器设计中的应用研究
最优化控制理论在飞行控制器设计中的应用研究近年来,飞机技术的发展日新月异,随着飞机的性能不断提高,飞机的控制也变得越来越复杂。
而飞行控制器即是飞机控制系统中至关重要的一环。
最优化控制理论在飞行控制器设计中的应用研究,一直是研究者们的热点话题。
本文就从理论和实际应用两个方面,探讨最优化控制理论在飞行控制器设计中的应用。
一、最优化控制理论最优化控制理论是一种将数学优化思想应用到控制领域的理论。
其目的是在满足系统的约束条件下,通过优化算法来寻求使某一性能指标达到最优的控制策略。
随着控制理论的发展,越来越多的学者开始将最优化控制理论应用到系统控制中。
最优化控制理论的主要思想是通过数学模型建立系统,然后使用最优化算法,如梯度下降法、牛顿迭代法、遗传算法等,来求解系统控制问题。
这种方法虽然计算时间较长,但能够在满足系统约束条件的前提下,寻找到全局最优解,具有较高的控制精度和稳定性。
二、最优化控制在飞行控制中的应用最优化控制理论在多个领域都有应用,其中在飞行控制器设计中尤为突出。
2.1 飞行器自主控制在飞行器自主控制领域中,最优化控制理论被广泛应用。
例如,在飞机设计中,通过数学建模,可以将系统性能转化为数学优化问题。
然后,通过牛顿迭代法等方法求解优化问题,从而寻找到使得系统控制性能指标最优的控制策略。
2.2 飞行器舵面控制在飞行器舵面控制中,最优化控制理论可以被应用。
例如,在使用舵面时,可以使用最优化控制来寻找使飞机偏差最小的控制策略。
在这种情况下,使用最优化控制可以大大提高控制精度和稳定性。
2.3 飞行路径规划在飞行路径规划中,最优化控制理论也可以被应用。
例如,通过数学建模,可以将路径规划问题转化为数学优化问题。
然后,通过最优化算法求解,可以找到使得系统能量最小的飞行路径。
这种方法在节约燃料、提高航程等方面有显著效果。
三、总结最优化控制理论在飞行控制器设计中的应用,可以大大提高飞机的控制精度和稳定性。
同时,最优化控制理论也是一种非常复杂的理论,建立数学模型和求解方法非常具有挑战性。
速度约束控制障碍函数
速度约束控制障碍函数摘要:一、引言二、速度约束控制简介1.定义与概念2.应用场景三、障碍函数介绍1.定义与性质2.常见障碍函数类型四、速度约束控制中的障碍函数1.速度约束控制与障碍函数的关系2.具体应用方法五、案例分析1.实际应用背景2.解决方案与效果六、总结与展望1.总结2.展望正文:一、引言随着科技的发展,自动控制技术在各领域得到了广泛应用。
速度约束控制作为自动控制的一个重要分支,在实际工程中有着广泛的应用。
本文将对速度约束控制中的障碍函数进行详细介绍。
二、速度约束控制简介1.定义与概念速度约束控制是一种在给定速度约束条件下,对控制输入进行限制的自动控制方法。
其主要目的是在满足系统性能要求的同时,保证系统的稳定性。
2.应用场景速度约束控制广泛应用于航空航天、汽车、机器人等领域的控制系统中。
例如,在汽车自动变速器控制中,需要对油门踏板施加的力进行限制,以保证车辆行驶的安全性和平稳性。
三、障碍函数介绍1.定义与性质障碍函数是一种在给定目标函数和约束条件下,用于描述系统性能与约束之间关系的函数。
其具有单调性、可微性和凸性等性质。
2.常见障碍函数类型常见的障碍函数有:分段线性障碍函数、二次型障碍函数、指数型障碍函数等。
四、速度约束控制中的障碍函数1.速度约束控制与障碍函数的关系在速度约束控制中,障碍函数用于描述系统在满足速度约束条件下的性能与控制之间的关系。
通过优化障碍函数,可以得到满足速度约束条件的最优控制输入。
2.具体应用方法在速度约束控制中,可以采用如下方法求解最优控制输入:(1)将速度约束条件转化为障碍函数的形式;(2)求解障碍函数的最优解,得到满足速度约束条件的最优控制输入。
五、案例分析1.实际应用背景某汽车自动变速器控制系统需要实现以下目标:在满足速度约束条件下,使车辆行驶过程中的油门踏板施加力最小。
2.解决方案与效果采用速度约束控制中的障碍函数方法,将速度约束条件转化为障碍函数的形式,并求解该障碍函数的最优解。
can phy结构
can phy结构(实用版)目录1.Can phy 结构概述2.Can phy 结构的组成部分3.Can phy 结构的工作原理4.Can phy 结构的应用领域5.Can phy 结构的优势与局限性正文1.Can phy 结构概述Can phy(控制器物理层)结构是一种在汽车电子系统中广泛应用的通信协议。
它是一种多主控制器的通信架构,主要用于实现汽车电子系统中各种控制器之间的数据传输和通信。
Can phy 结构具有高可靠性、实时性和灵活性等特点,满足了汽车电子系统对于通信协议的高要求。
2.Can phy 结构的组成部分Can phy 结构主要由以下几个部分组成:(1)控制器:控制器是 Can phy 结构的核心部分,负责处理各种传感器和执行器的数据,并通过 Can 总线发送和接收信息。
(2)Can 总线:Can 总线是控制器之间进行通信的物理媒介,主要负责传输数据和控制信息。
(3)Can phy 层:Can phy 层是 Can 总线的底层物理层,负责实现数据在总线上的传输。
它包括了物理层、数据链路层和网络层等层次。
3.Can phy 结构的工作原理Can phy 结构的工作原理主要包括以下几个步骤:(1)控制器通过 Can 总线发送数据和控制信息。
(2)其他控制器接收到数据和控制信息后,根据需要进行相应的处理。
(3)控制器之间通过 Can 总线进行通信,以实现汽车电子系统中各种功能。
4.Can phy 结构的应用领域Can phy 结构在汽车电子系统中有着广泛的应用,主要包括以下几个领域:(1)动力系统:用于实现发动机、变速器等部件之间的通信和控制。
(2)底盘系统:用于实现悬挂系统、刹车系统等部件之间的通信和控制。
(3)车身系统:用于实现门窗、座椅等部件之间的通信和控制。
(4)电子辅助系统:用于实现导航、倒车雷达等辅助驾驶功能。
5.Can phy 结构的优势与局限性Can phy 结构具有以下优势:(1)高可靠性:Can phy 结构具有多主控制器的通信架构,能够实现自动切换和冗余备份,提高了系统的可靠性。
基于时间触发的CAN协议任务调度优化算法

基于时间触发的CAN协议任务调度优化算法
朱智林;刘晓华;韩俊刚
【期刊名称】《计算机科学》
【年(卷),期】2005(032)010
【摘要】在基于时间触发的CAN协议的实时分布系统中,时间触发的CAN协议的任务调度是一个重要的问题.一种多项式时间复杂度的优化算法被提出来构造调度表,其基本周期有4种假定情况,其中在实验中给出了每种算法的渐近性能比,并证明折衷周期算法的性能要优于其它三种算法.
【总页数】3页(P214-215,225)
【作者】朱智林;刘晓华;韩俊刚
【作者单位】西安电子科技大学软件研究所,西安710071;山东工商学院计算机系,烟台264005;西安邮电学院计算机系,西安710061
【正文语种】中文
【中图分类】TP31
【相关文献】
1.基于FTTCAN的时间触发CAN通信协议研究 [J], 杨诚
2.基于LM3S811的时间触发多任务调度器设计 [J], 李繁;曾炼成;严剑
3.基于FPGA的时间触发协议控制器实现 [J], 陈高锋;李长悦;武荣
4.基于IEEE 1588协议的时间触发以太网同步算法 [J], 赵琪;赵怀林;祝波
5.基于LabVIEW的一种时间触发协议设计实现 [J], 刘伟;李小卿;胡车
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
x*
x
* j
*
x*
λ > 0, c = 0
* j * j
λ =c =0
* j
λ*j = 0, c*j > 0
第09章 约束优化: 约束优化:理论
实用优化方法
数学与系统科学学院
或严格) 强 (或严格)积极约束
一般地,需要定义强 或者严格 积极(strongly or 或者严格) 一般地,需要定义强(或者严格)积极 strictly active)约束指标集 约束指标集
第09章 约束优化: 约束优化:理论
实用优化方法
数学与系统科学学院
建立对偶理论的基本思路
希望解决的问题 ◎ 希望解决的问题 定义新问题, 为变量? ⊙ 定义新问题,以 为变量?且解是 ! 新问题的解可给原问题提供一个下界! ⊙ 新问题的解可给原问题提供一个下界! ◎ Lagrange对偶 计算)与Fenche对偶 理论)! 对偶(计算 与 对偶(理论 ! 对偶 计算 对偶 理论 ◎ 建立对偶理论的基本思路 建立对偶理论的基本思路 ⊙ 将约束极小化问题 ⊙ 定义对偶问题是 “min-max”问题 问题 “max-min”问题 问题
第09章 约束优化: 约束优化:理论
实用优化方法
数学与系统科学学院
二阶条件( 二阶条件(续)
问题: 取何值时, 问题:讨论参数 取何值时, x2 x*=0是局部极小点 x*=0是局部极小点
c(x) = 0 for β = 1 / 4 c(x) = 0 for β = 1
1
x1
f
第09章 约束优化: 约束优化:理论
条件, 条件/KKT点 ◎ Karush-Kuhn-Tucker条件 KKT条件 条件 条件 点 为对应的Lagrange乘子 ◎ 称 为对应的 乘子 互补条件/严格互补 ◎ 互补条件 严格互补
第09章 约束优化: 约束优化:理论
实用优化方法
数学与系统科学学院
一阶条件(续)
∇c1
x2
∇c1
∇f
∇f ∇f
实用优化方法
数学与系统科学学院
Lagrange乘子法 Lagrange乘子法
当约束规范成立时,必要条件 约束规范成立时
引入Lagrange函数: 函数: 引入 函数
一阶必要条件即
第09章 约束优化: 约束优化:理论
实用优化方法
数学与系统科学学院
凸规划(convex programming) 凸规划
正则性假设1 正则性假设1
正则性假设1: 正则性假设 : 例 考虑约束条件 x2 subject to 在 x*=(0, 0)的情况 的情况
minimize x1 subject to
第09章 约束优化: 约束优化:理论
实用优化方法
数学与系统科学学院
约束规范
约束规范( 约束规范 constraint quality, CQ): : 常用的约束规范. 引理 常用的约束规范 当 i) ii)
凸规划(convex programming): 凸集 上极小化凸函数 凸规划 凸集K上极小化凸函数
定理. 凸规划的任一KKT点是全局极小点 定理 凸规划的任一 点是全局极小点. 点是全局极小点 凸规划的所有局部解也是全局解 局部解也是全局解。 注1. 凸规划的所有局部解也是全局解。 线性规划是凸规划 二次规划中目标函数的海森矩阵 是凸规划; 注2. 线性规划是凸规划;二次规划中目标函数的海森矩阵 半正定时,也是凸规划. 半正定时,也是凸规划
实用优化方法
数学与系统科学学院
一阶条件
第09章 约束优化: 约束优化:理论
实用优化方法
数学与系统科学学院
一阶条件:KKT条件 一阶条件: 条件
正则性假设1: 正则性假设 : 定理(一阶条件 定理 一阶条件). 若 x* 是局部极小点且在 x* 处正则性假 一阶条件 成立, 设1成立,则存在 成立 则存在Lagrange乘子 使得 乘子 满足
.
是空集当且仅当存在
第09章 约束优化: 约束优化:理论
使得
实用优化方法
数学与系统科学学院
Farkas引理 引理. 引理 给定 集合 中的向量 .
是空集当且仅当存在 使得
第09章 约束优化: 约束优化:理论
实用优化方法
数学与系统科学学院
一阶必要条件
f 在x’的下降方向集 的下降方向集 考虑可行序列 其中 称 且 , ,则 是长度固定的向量. 是长度固定的向量
第09章 约束优化: 约束优化:理论
实用优化方法
数学与系统科学学院
一阶条件 的 理论证明
第09章 约束优化: 约束优化:理论
实用优化方法
数学与系统科学学院
点与闭凸集的分离定理及应用
给定 令 分离定理. 分离定理 存在超平面 Farkas引理 引理. 引理 集合 中的向量
分离闭凸集 C 和非零向量
数学与系统科学学院
一阶必要条件:KKT条件 一阶必要条件: 条件
正则性假设1: 正则性假设 : 定理(一阶条件 定理 一阶条件). 若 x* 是局部极小点且在 x* 处正则性假 一阶条件 成立, 设1成立,则存在 成立 则存在Lagrange乘子 使得 乘子 满足
条件, 条件/KKT点 ◎ Karush-Kuhn-Tucker条件 KKT条件 条件 条件 点 为对应的Lagrange乘子 ◎ 称 为对应的 乘子 互补条件/严格互补 ◎ 互补条件 严格互补 第09章 数学与系统科学学院 实用优化方法 约束优化: 约束优化:理论
数学与系统科学学院
Lagrange 对偶
第09章 约束优化: 约束优化:理论
实用优化方法
数学与系统科学学院
线性规划的对偶理论
对偶问题 线性规划的对偶理论: 原问题←→对偶问题 线性规划的对偶理论: 原问题 • 原问题-minimize,对偶问题-maximize 原问题- ,对偶问题- • 原问题最优解所对应的单纯形乘子是对偶问题的解 • 弱对偶性 • 强对偶性 之一有解,则另一个必有解,且最优值相等 对偶性(之一有解 则另一个必有解,且最优值相等) 之一有解,
第09章 约束优化: 约束优化:理论
实用优化方法
数学与系统科学学院
两个重要概念
可行解 处的积极约束、积极 处的积极约束、积极(active)集 积极约束 集 积极的不等式约束指标集 积极(约束指标 集 积极 约束指标)集 约束指标 例2.2.2
x2
x*
x1
Lagrange函数: 函数: 函数
第09章 约束优化: 约束优化:理论
第09章 约束优化: 约束优化:理论
实用优化方法
数学与系统科学学院
乘子的解释- 乘子的解释-灵敏度
对约束进行扰动 对约束进行扰动
记扰动问题的解和乘子分别为
,则
Lagrange乘子的解释:-(最优值关于约束的 灵敏度 乘子的解释:- 最优值关于约束的 乘子的解释:- 最优值关于约束的)灵敏度 约束函数变化时,对应的最优值的变化率! 约束函数变化时,对应的最优值的变化率!
min-max问题 问题←→原问题 原 问题
第09章 约束优化: 约束优化:理论
max-min问题 问题←→对偶问题 对偶问题 问题 对偶 数学与系统科学学院
实用优化方法
Lagrange对偶 对偶
min-max问题是研究对偶问题的基础!各种对偶的区别: 问题是研究对偶问题的基础!各种对偶的区别: 问题是研究对偶问题的基础 的定义方式不同! 的定义方式不同! 不同 原问题(primal) 原问题
x1
∇f
x*
∇c1
第09章 约束优化: 约束优化:理论
实用优化方法
数学与系统科学学院
一阶条件( 一阶条件(续)
∇f
p
∇c1
∇f
p
第09章 约束优化: 约束优化:理论
实用优化方法
数学与系统科学学院
一阶条件( 一阶条件(续)
{2}
∇c 2
∇f ∇c1
∇c2
∇c1
∇f
第09章 约束优化: 约束优化:理论
第09章 约束优化: 约束优化:理论
实用优化方法
数学与系统科学学院
等式约束问题--二阶条件 等式约束问题--二阶条件 -是问题的局部极小点, 设 x* 是问题的局部极小点,且满足 KKT 条件 二阶必要条件:对任一序列可行方向 , 二阶必要条件:对任一序列可行方向p,有 条件 约束规范(CQ): : 约束规范 二阶必要条件:如果 是极小点 是极小点, 成立, 二阶必要条件:如果x*是极小点,且CQ成立,则 条件 成立 二阶充分条件: 二阶充分条件:如果事实 条件 成立, 必是严格局部极小点. 成立,则x*必是严格局部极小点 必是严格局部极小点
定理(二阶充分条件 如果在x* 处存在Lagrange乘子 定理 二阶充分条件). 如果在 处存在 二阶充分条件 乘子 使得KKT条件成立,且对该乘子 条件成立, 使得 条件成立 ,满足 是约束问题的严格局部极小点. 则 x* 是约束问题的严格局部极小点
第09章 约束优化: 约束优化:理论
实用优化方法
(LCQ),或者 ,
线性无关时(LICQ),有 , 线性无关时
定理 设 x* 是约束问题的局部极小点,且在 x* 处LCQ或者 是约束问题的局部极小点, 或者 LICQ成立 则 x* 满足 成立, 满足KKT条件 条件. 成立 条件
第09章 约束优化: 约束优化:理论
实用优化方法
数学与系统科学学院
二阶条件
第09章:约束优化:理论 09章 约束优化:
Theory of Constrained Optimization
第09章 约束优化: 约束优化:理论
实用优化方法
数学与系统科学学院
约束优化