Advanced Functions
悉雅特常用Cicode Function总结及其中文注释
Cicode函数目录ActiveX Functions 制造和调用ActiveX 目标。
Alarm Functions 显示和管理报警。
Clipboard Functions 与Windows 剪贴板的数据交换。
Cluster Functions 管理Citect 串。
Colour Functions 颜色处理功能。
Communication Functions 提供通讯端口的访问。
DDE Functions Citec和Windows 应用软件的动态数据交换。
.Device Functions 规定对各种设备(如打印设备、磁盘设备、数据库设备)的访问。
Display Functions 管理图形页的显示和处理。
DLL Functions 执行动态连接库功能。
Error Functions 设计和处理错误信息。
Event Functions 设计和处理异步事件。
File Functions 提供访问标准的ASCII文件功能。
Form Functions 制造和显示数据登录窗口。
Format Functions 将数据转化成格式化字符串。
FTP Functions 管理FTP(文件传输协议)通信和文件。
FuzzyTech Functions 模糊逻辑功能。
Group Functions 操作“组”,象区域、设备、报警类和其他一些可以作为组存取的数据等等。
Graph Functions 同Plot Functions。
I/O Device Functions 控制I/O设备,显示I/O设备的信息,在I/O设备中读写数据。
Keyboard Functions 键盘输入功能。
Mail Functions Citect 用户之间(或任何其他的计算机)的邮件交换(如报表)。
Math/Trig Functions 标准的数学功能。
Miscellaneous Functions 杂项功能。
Page Functions 图形页、标准报警页和趋势页功能。
Tektronix MDO3000 Series 数字多功能作业仪用户指南说明书
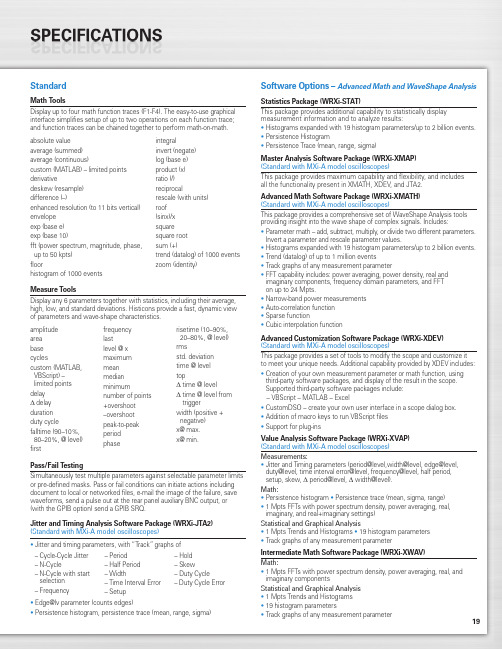
19StandardMath ToolsDisplay up to four math function traces (F1-F4). The easy-to-use graphical interface simplifies setup of up to two operations on each function trace;and function traces can be chained together to perform math-on-math.absolute value integralaverage (summed)invert (negate)average (continuous)log (base e)custom (MATLAB) – limited points product (x)derivativeratio (/)deskew (resample)reciprocaldifference (–)rescale (with units)enhanced resolution (to 11 bits vertical)roof envelope (sinx)/x exp (base e)square exp (base 10)square root fft (power spectrum, magnitude, phase,sum (+)up to 50 kpts) trend (datalog) of 1000 events floorzoom (identity)histogram of 1000 eventsMeasure ToolsDisplay any 6 parameters together with statistics, including their average,high, low, and standard deviations. Histicons provide a fast, dynamic view of parameters and wave-shape characteristics.Pass/Fail TestingSimultaneously test multiple parameters against selectable parameter limits or pre-defined masks. Pass or fail conditions can initiate actions including document to local or networked files, e-mail the image of the failure, save waveforms, send a pulse out at the rear panel auxiliary BNC output, or (with the GPIB option) send a GPIB SRQ.Jitter and Timing Analysis Software Package (WRXi-JTA2)(Standard with MXi-A model oscilloscopes)•Jitter and timing parameters, with “Track”graphs of •Edge@lv parameter (counts edges)• Persistence histogram, persistence trace (mean, range, sigma)Software Options –Advanced Math and WaveShape AnalysisStatistics Package (WRXi-STAT)This package provides additional capability to statistically display measurement information and to analyze results:• Histograms expanded with 19 histogram parameters/up to 2 billion events.• Persistence Histogram• Persistence Trace (mean, range, sigma)Master Analysis Software Package (WRXi-XMAP)(Standard with MXi-A model oscilloscopes)This package provides maximum capability and flexibility, and includes all the functionality present in XMATH, XDEV, and JTA2.Advanced Math Software Package (WRXi-XMATH)(Standard with MXi-A model oscilloscopes)This package provides a comprehensive set of WaveShape Analysis tools providing insight into the wave shape of complex signals. Includes:•Parameter math – add, subtract, multiply, or divide two different parameters.Invert a parameter and rescale parameter values.•Histograms expanded with 19 histogram parameters/up to 2 billion events.•Trend (datalog) of up to 1 million events•Track graphs of any measurement parameter•FFT capability includes: power averaging, power density, real and imaginary components, frequency domain parameters, and FFT on up to 24 Mpts.•Narrow-band power measurements •Auto-correlation function •Sparse function• Cubic interpolation functionAdvanced Customization Software Package (WRXi-XDEV)(Standard with MXi-A model oscilloscopes)This package provides a set of tools to modify the scope and customize it to meet your unique needs. Additional capability provided by XDEV includes:•Creation of your own measurement parameter or math function, using third-party software packages, and display of the result in the scope. Supported third-party software packages include:– VBScript – MATLAB – Excel•CustomDSO – create your own user interface in a scope dialog box.• Addition of macro keys to run VBScript files •Support for plug-insValue Analysis Software Package (WRXi-XVAP)(Standard with MXi-A model oscilloscopes)Measurements:•Jitter and Timing parameters (period@level,width@level, edge@level,duty@level, time interval error@level, frequency@level, half period, setup, skew, Δ period@level, Δ width@level).Math:•Persistence histogram •Persistence trace (mean, sigma, range)•1 Mpts FFTs with power spectrum density, power averaging, real, imaginary, and real+imaginary settings)Statistical and Graphical Analysis•1 Mpts Trends and Histograms •19 histogram parameters •Track graphs of any measurement parameterIntermediate Math Software Package (WRXi-XWAV)Math:•1 Mpts FFTs with power spectrum density, power averaging, real, and imaginary componentsStatistical and Graphical Analysis •1 Mpts Trends and Histograms •19 histogram parameters•Track graphs of any measurement parameteramplitude area base cyclescustom (MATLAB,VBScript) –limited points delay Δdelay duration duty cyclefalltime (90–10%, 80–20%, @ level)firstfrequency lastlevel @ x maximum mean median minimumnumber of points +overshoot –overshoot peak-to-peak period phaserisetime (10–90%, 20–80%, @ level)rmsstd. deviation time @ level topΔ time @ levelΔ time @ level from triggerwidth (positive + negative)x@ max.x@ min.– Cycle-Cycle Jitter – N-Cycle– N-Cycle with start selection – Frequency– Period – Half Period – Width– Time Interval Error – Setup– Hold – Skew– Duty Cycle– Duty Cycle Error20WaveRunner WaveRunner WaveRunner WaveRunner WaveRunner 44Xi-A64Xi-A62Xi-A104Xi-A204Xi-AVertical System44MXi-A64MXi-A104MXi-A204MXi-ANominal Analog Bandwidth 400 MHz600 MHz600 MHz 1 GHz 2 GHz@ 50 Ω, 10 mV–1 V/divRise Time (Typical)875 ps500 ps500 ps300 ps180 psInput Channels44244Bandwidth Limiters20 MHz; 200 MHzInput Impedance 1 MΩ||16 pF or 50 Ω 1 MΩ||20 pF or 50 ΩInput Coupling50 Ω: DC, 1 MΩ: AC, DC, GNDMaximum Input Voltage50 Ω: 5 V rms, 1 MΩ: 400 V max.50 Ω: 5 V rms, 1 MΩ: 250 V max.(DC + Peak AC ≤ 5 kHz)(DC + Peak AC ≤ 10 kHz)Vertical Resolution8 bits; up to 11 with enhanced resolution (ERES)Sensitivity50 Ω: 2 mV/div–1 V/div fully variable; 1 MΩ: 2 mV–10 V/div fully variableDC Gain Accuracy±1.0% of full scale (typical); ±1.5% of full scale, ≥ 10 mV/div (warranted)Offset Range50 Ω: ±1 V @ 2–98 mV/div, ±10 V @ 100 mV/div–1 V/div; 50Ω:±400mV@2–4.95mV/div,±1V@5–99mv/div,1 M Ω: ±1 V @ 2–98 mV/div, ±10 V @ 100 mV/div–1 V/div,±10 V @ 100 mV–1 V/div±**********/div–10V/div 1 M Ω: ±400 mV @ 2–4.95 mV/div, ±1 V @5–99 mV/div, ±10 V @ 100 mV–1 V/div,±*********–10V/divInput Connector ProBus/BNCTimebase SystemTimebases Internal timebase common to all input channels; an external clock may be applied at the auxiliary inputTime/Division Range Real time: 200 ps/div–10 s/div, RIS mode: 200 ps/div to 10 ns/div, Roll mode: up to 1,000 s/divClock Accuracy≤ 5 ppm @ 25 °C (typical) (≤ 10 ppm @ 5–40 °C)Sample Rate and Delay Time Accuracy Equal to Clock AccuracyChannel to Channel Deskew Range±9 x time/div setting, 100 ms max., each channelExternal Sample Clock DC to 600 MHz; (DC to 1 GHz for 104Xi-A/104MXi-A and 204Xi-A/204MXi-A) 50 Ω, (limited BW in 1 MΩ),BNC input, limited to 2 Ch operation (1 Ch in 62Xi-A), (minimum rise time and amplitude requirements applyat low frequencies)Roll Mode User selectable at ≥ 500 ms/div and ≤100 kS/s44Xi-A64Xi-A62Xi-A104Xi-A204Xi-A Acquisition System44MXi-A64MXi-A104MXi-A204MXi-ASingle-Shot Sample Rate/Ch 5 GS/sInterleaved Sample Rate (2 Ch) 5 GS/s10 GS/s10 GS/s10 GS/s10 GS/sRandom Interleaved Sampling (RIS)200 GS/sRIS Mode User selectable from 200 ps/div to 10 ns/div User selectable from 100 ps/div to 10 ns/div Trigger Rate (Maximum) 1,250,000 waveforms/secondSequence Time Stamp Resolution 1 nsMinimum Time Between 800 nsSequential SegmentsAcquisition Memory Options Max. Acquisition Points (4 Ch/2 Ch, 2 Ch/1 Ch in 62Xi-A)Segments (Sequence Mode)Standard12.5M/25M10,00044Xi-A64Xi-A62Xi-A104Xi-A204Xi-A Acquisition Processing44MXi-A64MXi-A104MXi-A204MXi-ATime Resolution (min, Single-shot)200 ps (5 GS/s)100 ps (10 GS/s)100 ps (10 GS/s)100 ps (10 GS/s)100 ps (10 GS/s) Averaging Summed and continuous averaging to 1 million sweepsERES From 8.5 to 11 bits vertical resolutionEnvelope (Extrema)Envelope, floor, or roof for up to 1 million sweepsInterpolation Linear or (Sinx)/xTrigger SystemTrigger Modes Normal, Auto, Single, StopSources Any input channel, External, Ext/10, or Line; slope and level unique to each source, except LineTrigger Coupling DC, AC (typically 7.5 Hz), HF Reject, LF RejectPre-trigger Delay 0–100% of memory size (adjustable in 1% increments, or 100 ns)Post-trigger Delay Up to 10,000 divisions in real time mode, limited at slower time/div settings in roll modeHold-off 1 ns to 20 s or 1 to 1,000,000,000 events21WaveRunner WaveRunner WaveRunner WaveRunner WaveRunner 44Xi-A 64Xi-A 62Xi-A104Xi-A 204Xi-A Trigger System (cont’d)44MXi-A64MXi-A104MXi-A204MXi-AInternal Trigger Level Range ±4.1 div from center (typical)Trigger and Interpolator Jitter≤ 3 ps rms (typical)Trigger Sensitivity with Edge Trigger 2 div @ < 400 MHz 2 div @ < 600 MHz 2 div @ < 600 MHz 2 div @ < 1 GHz 2 div @ < 2 GHz (Ch 1–4 + external, DC, AC, and 1 div @ < 200 MHz 1 div @ < 200 MHz 1 div @ < 200 MHz 1 div @ < 200 MHz 1 div @ < 200 MHz LFrej coupling)Max. Trigger Frequency with400 MHz 600 MHz 600 MHz 1 GHz2 GHzSMART Trigger™ (Ch 1–4 + external)@ ≥ 10 mV@ ≥ 10 mV@ ≥ 10 mV@ ≥ 10 mV@ ≥ 10 mVExternal Trigger RangeEXT/10 ±4 V; EXT ±400 mVBasic TriggersEdgeTriggers when signal meets slope (positive, negative, either, or Window) and level conditionTV-Composite VideoT riggers NTSC or PAL with selectable line and field; HDTV (720p, 1080i, 1080p) with selectable frame rate (50 or 60 Hz)and Line; or CUSTOM with selectable Fields (1–8), Lines (up to 2000), Frame Rates (25, 30, 50, or 60 Hz), Interlacing (1:1, 2:1, 4:1, 8:1), or Synch Pulse Slope (Positive or Negative)SMART TriggersState or Edge Qualified Triggers on any input source only if a defined state or edge occurred on another input source.Delay between sources is selectable by time or eventsQualified First In Sequence acquisition mode, triggers repeatedly on event B only if a defined pattern, state, or edge (event A) is satisfied in the first segment of the acquisition. Delay between sources is selectable by time or events Dropout Triggers if signal drops out for longer than selected time between 1 ns and 20 s.PatternLogic combination (AND, NAND, OR, NOR) of 5 inputs (4 channels and external trigger input – 2 Ch+EXT on WaveRunner 62Xi-A). Each source can be high, low, or don’t care. The High and Low level can be selected independently. Triggers at start or end of the patternSMART Triggers with Exclusion TechnologyGlitch and Pulse Width Triggers on positive or negative glitches with widths selectable from 500 ps to 20 s or on intermittent faults (subject to bandwidth limit of oscilloscope)Signal or Pattern IntervalTriggers on intervals selectable between 1 ns and 20 sTimeout (State/Edge Qualified)Triggers on any source if a given state (or transition edge) has occurred on another source.Delay between sources is 1 ns to 20 s, or 1 to 99,999,999 eventsRuntTrigger on positive or negative runts defined by two voltage limits and two time limits. Select between 1 ns and 20 sSlew RateTrigger on edge rates. Select limits for dV, dt, and slope. Select edge limits between 1 ns and 20 s Exclusion TriggeringTrigger on intermittent faults by specifying the normal width or periodLeCroy WaveStream Fast Viewing ModeIntensity256 Intensity Levels, 1–100% adjustable via front panel control Number of Channels up to 4 simultaneouslyMax Sampling Rate5 GS/s (10 GS/s for WR 62Xi-A, 64Xi-A/64MXi-A,104Xi-A/104MXi-A, 204Xi-A/204MXi-A in interleaved mode)Waveforms/second (continuous)Up to 20,000 waveforms/secondOperationFront panel toggle between normal real-time mode and LeCroy WaveStream Fast Viewing modeAutomatic SetupAuto SetupAutomatically sets timebase, trigger, and sensitivity to display a wide range of repetitive signalsVertical Find ScaleAutomatically sets the vertical sensitivity and offset for the selected channels to display a waveform with maximum dynamic range44Xi-A 64Xi-A 62Xi-A104Xi-A 204Xi-A Probes44MXi-A 64MXi-A104MXi-A 204MXi-AProbesOne Passive probe per channel; Optional passive and active probes available Probe System; ProBus Automatically detects and supports a variety of compatible probes Scale FactorsAutomatically or manually selected, depending on probe usedColor Waveform DisplayTypeColor 10.4" flat-panel TFT-LCD with high resolution touch screenResolutionSVGA; 800 x 600 pixels; maximum external monitor output resolution of 2048 x 1536 pixelsNumber of Traces Display a maximum of 8 traces. Simultaneously display channel, zoom, memory, and math traces Grid StylesAuto, Single, Dual, Quad, Octal, XY , Single + XY , Dual + XY Waveform StylesSample dots joined or dots only in real-time mode22Zoom Expansion TracesDisplay up to 4 Zoom/Math traces with 16 bits/data pointInternal Waveform MemoryM1, M2, M3, M4 Internal Waveform Memory (store full-length waveform with 16 bits/data point) or store to any number of files limited only by data storage mediaSetup StorageFront Panel and Instrument StatusStore to the internal hard drive, over the network, or to a USB-connected peripheral deviceInterfaceRemote ControlVia Windows Automation, or via LeCroy Remote Command Set Network Communication Standard VXI-11 or VICP , LXI Class C Compliant GPIB Port (Accessory)Supports IEEE – 488.2Ethernet Port 10/100/1000Base-T Ethernet interface (RJ-45 connector)USB Ports5 USB 2.0 ports (one on front of instrument) supports Windows-compatible devices External Monitor Port Standard 15-pin D-Type SVGA-compatible DB-15; connect a second monitor to use extended desktop display mode with XGA resolution Serial PortDB-9 RS-232 port (not for remote oscilloscope control)44Xi-A 64Xi-A 62Xi-A104Xi-A 204Xi-A Auxiliary Input44MXi-A 64MXi-A104MXi-A 204MXi-ASignal Types Selected from External Trigger or External Clock input on front panel Coupling50 Ω: DC, 1 M Ω: AC, DC, GND Maximum Input Voltage50 Ω: 5 V rms , 1 M Ω: 400 V max.50 Ω: 5 V rms , 1 M Ω: 250 V max. (DC + Peak AC ≤ 5 kHz)(DC + Peak AC ≤ 10 kHz)Auxiliary OutputSignal TypeTrigger Enabled, Trigger Output. Pass/Fail, or Off Output Level TTL, ≈3.3 VConnector TypeBNC, located on rear panelGeneralAuto Calibration Ensures specified DC and timing accuracy is maintained for 1 year minimumCalibratorOutput available on front panel connector provides a variety of signals for probe calibration and compensationPower Requirements90–264 V rms at 50/60 Hz; 115 V rms (±10%) at 400 Hz, Automatic AC Voltage SelectionInstallation Category: 300 V CAT II; Max. Power Consumption: 340 VA/340 W; 290 VA/290 W for WaveRunner 62Xi-AEnvironmentalTemperature: Operating+5 °C to +40 °C Temperature: Non-Operating -20 °C to +60 °CHumidity: Operating Maximum relative humidity 80% for temperatures up to 31 °C decreasing linearly to 50% relative humidity at 40 °CHumidity: Non-Operating 5% to 95% RH (non-condensing) as tested per MIL-PRF-28800F Altitude: OperatingUp to 3,048 m (10,000 ft.) @ ≤ 25 °C Altitude: Non-OperatingUp to 12,190 m (40,000 ft.)PhysicalDimensions (HWD)260 mm x 340 mm x 152 mm Excluding accessories and projections (10.25" x 13.4" x 6")Net Weight7.26kg. (16.0lbs.)CertificationsCE Compliant, UL and cUL listed; Conforms to EN 61326, EN 61010-1, UL 61010-1 2nd Edition, and CSA C22.2 No. 61010-1-04Warranty and Service3-year warranty; calibration recommended annually. Optional service programs include extended warranty, upgrades, calibration, and customization services23Product DescriptionProduct CodeWaveRunner Xi-A Series Oscilloscopes2 GHz, 4 Ch, 5 GS/s, 12.5 Mpts/ChWaveRunner 204Xi-A(10 GS/s, 25 Mpts/Ch in interleaved mode)with 10.4" Color Touch Screen Display 1 GHz, 4 Ch, 5 GS/s, 12.5 Mpts/ChWaveRunner 104Xi-A(10 GS/s, 25 Mpts/Ch in interleaved mode)with 10.4" Color Touch Screen Display 600 MHz, 4 Ch, 5 GS/s, 12.5 Mpts/Ch WaveRunner 64Xi-A(10 GS/s, 25 Mpts/Ch in interleaved mode)with 10.4" Color Touch Screen Display 600 MHz, 2 Ch, 5 GS/s, 12.5 Mpts/Ch WaveRunner 62Xi-A(10 GS/s, 25 Mpts/Ch in interleaved mode)with 10.4" Color Touch Screen Display 400 MHz, 4 Ch, 5 GS/s, 12.5 Mpts/Ch WaveRunner 44Xi-A(25 Mpts/Ch in interleaved mode)with 10.4" Color Touch Screen DisplayWaveRunner MXi-A Series Oscilloscopes2 GHz, 4 Ch, 5 GS/s, 12.5 Mpts/ChWaveRunner 204MXi-A(10 GS/s, 25 Mpts/Ch in Interleaved Mode)with 10.4" Color Touch Screen Display 1 GHz, 4 Ch, 5 GS/s, 12.5 Mpts/ChWaveRunner 104MXi-A(10 GS/s, 25 Mpts/Ch in Interleaved Mode)with 10.4" Color Touch Screen Display 600 MHz, 4 Ch, 5 GS/s, 12.5 Mpts/Ch WaveRunner 64MXi-A(10 GS/s, 25 Mpts/Ch in Interleaved Mode)with 10.4" Color Touch Screen Display 400 MHz, 4 Ch, 5 GS/s, 12.5 Mpts/Ch WaveRunner 44MXi-A(25 Mpts/Ch in Interleaved Mode)with 10.4" Color Touch Screen DisplayIncluded with Standard Configuration÷10, 500 MHz, 10 M Ω Passive Probe (Total of 1 Per Channel)Standard Ports; 10/100/1000Base-T Ethernet, USB 2.0 (5), SVGA Video out, Audio in/out, RS-232Optical 3-button Wheel Mouse – USB 2.0Protective Front Cover Accessory PouchGetting Started Manual Quick Reference GuideAnti-virus Software (Trial Version)Commercial NIST Traceable Calibration with Certificate 3-year WarrantyGeneral Purpose Software OptionsStatistics Software Package WRXi-STAT Master Analysis Software Package WRXi-XMAP (Standard with MXi-A model oscilloscopes)Advanced Math Software Package WRXi-XMATH (Standard with MXi-A model oscilloscopes)Intermediate Math Software Package WRXi-XWAV (Standard with MXi-A model oscilloscopes)Value Analysis Software Package (Includes XWAV and JTA2) WRXi-XVAP (Standard with MXi-A model oscilloscopes)Advanced Customization Software Package WRXi-XDEV (Standard with MXi-A model oscilloscopes)Spectrum Analyzer and Advanced FFT Option WRXi-SPECTRUM Processing Web Editor Software Package WRXi-XWEBProduct Description Product CodeApplication Specific Software OptionsJitter and Timing Analysis Software Package WRXi-JTA2(Standard with MXi-A model oscilloscopes)Digital Filter Software PackageWRXi-DFP2Disk Drive Measurement Software Package WRXi-DDM2PowerMeasure Analysis Software Package WRXi-PMA2Serial Data Mask Software PackageWRXi-SDM QualiPHY Enabled Ethernet Software Option QPHY-ENET*QualiPHY Enabled USB 2.0 Software Option QPHY-USB †EMC Pulse Parameter Software Package WRXi-EMC Electrical Telecom Mask Test PackageET-PMT* TF-ENET-B required. †TF-USB-B required.Serial Data OptionsI 2C Trigger and Decode Option WRXi-I2Cbus TD SPI Trigger and Decode Option WRXi-SPIbus TD UART and RS-232 Trigger and Decode Option WRXi-UART-RS232bus TD LIN Trigger and Decode Option WRXi-LINbus TD CANbus TD Trigger and Decode Option CANbus TD CANbus TDM Trigger, Decode, and Measure/Graph Option CANbus TDM FlexRay Trigger and Decode Option WRXi-FlexRaybus TD FlexRay Trigger and Decode Physical Layer WRXi-FlexRaybus TDP Test OptionAudiobus Trigger and Decode Option WRXi-Audiobus TDfor I 2S , LJ, RJ, and TDMAudiobus Trigger, Decode, and Graph Option WRXi-Audiobus TDGfor I 2S LJ, RJ, and TDMMIL-STD-1553 Trigger and Decode Option WRXi-1553 TDA variety of Vehicle Bus Analyzers based on the WaveRunner Xi-A platform are available.These units are equipped with a Symbolic CAN trigger and decode.Mixed Signal Oscilloscope Options500 MHz, 18 Ch, 2 GS/s, 50 Mpts/Ch MS-500Mixed Signal Oscilloscope Option 250 MHz, 36 Ch, 1 GS/s, 25 Mpts/ChMS-500-36(500 MHz, 18 Ch, 2 GS/s, 50 Mpts/Ch Interleaved) Mixed Signal Oscilloscope Option 250 MHz, 18 Ch, 1 GS/s, 10 Mpts/Ch MS-250Mixed Signal Oscilloscope OptionProbes and Amplifiers*Set of 4 ZS1500, 1.5 GHz, 0.9 pF , 1 M ΩZS1500-QUADPAK High Impedance Active ProbeSet of 4 ZS1000, 1 GHz, 0.9 pF , 1 M ΩZS1000-QUADPAK High Impedance Active Probe 2.5 GHz, 0.7 pF Active Probe HFP25001 GHz Active Differential Probe (÷1, ÷10, ÷20)AP034500 MHz Active Differential Probe (x10, ÷1, ÷10, ÷100)AP03330 A; 100 MHz Current Probe – AC/DC; 30 A rms ; 50 A rms Pulse CP03130 A; 50 MHz Current Probe – AC/DC; 30 A rms ; 50 A rms Pulse CP03030 A; 50 MHz Current Probe – AC/DC; 30 A rms ; 50 A peak Pulse AP015150 A; 10 MHz Current Probe – AC/DC; 150 A rms ; 500 A peak Pulse CP150500 A; 2 MHz Current Probe – AC/DC; 500 A rms ; 700 A peak Pulse CP5001,400 V, 100 MHz High-Voltage Differential Probe ADP3051,400 V, 20 MHz High-Voltage Differential Probe ADP3001 Ch, 100 MHz Differential Amplifier DA1855A*A wide variety of other passive, active, and differential probes are also available.Consult LeCroy for more information.Product Description Product CodeHardware Accessories*10/100/1000Base-T Compliance Test Fixture TF-ENET-B †USB 2.0 Compliance Test Fixture TF-USB-B External GPIB Interface WS-GPIBSoft Carrying Case WRXi-SOFTCASE Hard Transit CaseWRXi-HARDCASE Mounting Stand – Desktop Clamp Style WRXi-MS-CLAMPRackmount Kit WRXi-RACK Mini KeyboardWRXi-KYBD Removable Hard Drive Package (Includes removeable WRXi-A-RHD hard drive kit and two hard drives)Additional Removable Hard DriveWRXi-A-RHD-02* A variety of local language front panel overlays are also available .† Includes ENET-2CAB-SMA018 and ENET-2ADA-BNCSMA.Customer ServiceLeCroy oscilloscopes and probes are designed, built, and tested to ensure high reliability. In the unlikely event you experience difficulties, our digital oscilloscopes are fully warranted for three years, and our probes are warranted for one year.This warranty includes:• No charge for return shipping • Long-term 7-year support• Upgrade to latest software at no chargeLocal sales offices are located throughout the world. Visit our website to find the most convenient location.© 2010 by LeCroy Corporation. All rights reserved. Specifications, prices, availability, and delivery subject to change without notice. Product or brand names are trademarks or requested trademarks of their respective holders.1-800-5-LeCroy WRXi-ADS-14Apr10PDF。
EFM32和EFR32无线SOC系列1低功耗定时器应用说明书

AN0026.1: EFM32 and EFR32 Wireless SOC Series 1 Low Energy TimerThis application note gives an overview of the Low Energy Timer (LETIMER) and demonstrates how to use it on the EFM32 and EFR32 wireless SOC Series 1 devices. For LETIMER information of EFM32 and EZR32 Wireless MCU Series 0 devices, refer to AN0026.0: EFM32 and EZR32 wireless MCU Series 0 Low Ener-gy Timer .This document discusses initializing the LETIMER, a basic setup for operation, and ways to utilize the added LETIMER functionality in more advanced applications.This application note includes the following:•This PDF document.•Source files (zip).•Example C-code.•Multiple IDE projects.KEY POINTS•16-bit down count timer.•2 Compare match registers.•Compare register 0 can be top timer top value.•Compare registers can be double buffered.•Double buffered 8-bit Repeat Register.•Same clock source as the Real Time Counter.•LETIMER can be triggered (started) by an RTC event or by software.•LETIMER can be started, stopped, and/or cleared by PRS.•2 output pins can optionally be configured to provide different waveforms on timer underflow:•Toggle output pin •Apply a positive pulse (pulse width of one LFACLKLETIMER period)•PWM•Interrupt on:•Compare matches •Timer underflow •Repeat done•Optionally runs during debug •PRS OutputDevice Compatibility 1.Device CompatibilityThis application note supports multiple device families, and some functionality is different depending on the device.MCU series 1 consists of the following:•EFM32 Jade Gecko (EFM32JG1/EFM32JG12)•EFM32 Pearl Gecko (EFM32PG1/EFM32PG12)•EFM32 Giant Gecko (EFM32GG11)•EFM32 Tiny Gecko (EFM32TG11)Wireless SoC series 1 consists of the followsing:•EFR32 Blue Gecko (EFR32BG1/EFR32BG12/EFR32BG13/EFR32BG14)•EFR32 Flex Gecko (EFR32FG1/EFR32FG12/EFR32FG13/EFR32FG14)•EFR32 Mighty Gecko (EFR32MG1/EFR32MG12/EFR32MG13/EFR32MG14)Introduction 2. IntroductionThe unique LETIMERTM, the Low Energy Timer, is a 16-bit timer that is available in energy mode EM2 and EM3 in addition to EM1 and EM0. Because of this, it can be used for timing and output generation when most of the device is powered down, allowing simple tasks to be performed while the power consumption of the system is kept at an absolute minimum. The LETIMER runs from the LFACLK which can be clocked by the LFXO, LFRCO, or ULFRCO.The LETIMER can be used to output a variety of waveforms with minimal software intervention. The waveforms include PWM, pulses with the duration of one LFACLKLETIMER period, and variable frequency waveforms. The LETIMER can also be configured to start counting on compare matches PRS from the RTCC.An overview of the LETIMER module is shown in Figure 2.1 (p. 3). The LETIMER is a 16-bit down-counter with two compare registers, LETIMERn_COMP0 and LETIMERn_COMP1. The LETIMERn_COMP0 register can optionally act as a top value for the counter. The repeat counter LETIMERn_REP0 allows the timer to count a specified number of times before it stops. Both the LETIMERn_COMP0 and LETIMERn_REP0 registers can be double buffered by the LETIMERn_COMP1 and LETIMERn_REP1 registers to allow continu-ous operation. The timer can generate a single pin output, or two linked outputs.Figure 2.1. LETIMER Overview3. LETIMER Features3.1 Compare RegisterThe LETIMER has two compare match registers, LETIMERn_COMP0 and LETIMERn_COMP1. Each of these compare registers are capable of generating an interrupt when the counter value LETIMERn_CNT becomes equal to their value. When LETIMERn_CNT be-comes equal to the value of LETIMERn_COMP0, the interrupt flag COMP0 in LETIMERn_IF is set, and when LETIMERn_CNT be-comes equal to the value of LETIMERn_COMP1, the interrupt flag COMP1 in LETIMERn_IF is set.The compare values can be set using LETIMER_CompareSet(LETIMER_TypeDef *letimer, unsigned int comp, uint32_t value) from emlib.3.2 Top ValueIf COMP0TOP in LETIMERn_CTRL is set, the value of LETIMERn_COMP0 acts as the top value of the timer, and LETIMERn_COMP0 is loaded into LETIMERn_CNT on timer underflow. Otherwise the timer wraps around to 0xFFFF. The underflow interrupt flag UF in LETIMERn_IF is set when the timer reaches zero.If BUFTOP in LETIMERn_CTRL is set, the value of LETIMERn_COMP0 is buffered by LETIMERn_COMP1. In this mode, the value of LETIMERn_COMP1 is loaded into LETIMERn_COMP0 every time LETIMERn_REP0 is about to decrement to 0.By default, the timer wraps around to the top value or 0xFFFF on each underflow, and continues counting. The repeat counters can be used to get more control of the operation of the timer, including defining the number of times the counter should wrap around. There are four repeat modes available which are detailed in the table below.Table 3.1. LETIMER Repeat ModesThe interrupt flags REP0 and REP1 in LETIMERn_IF are set whenever LETIMERn_REP0 or LETIMERn_REP1 are decremented to 0 respectively. REP0 is also set when the value of LETIMERn_REP1 is loaded into LETIMERn_REP0 in buffered mode.The function LETIMER_RepeatSet(LETIMER_TypeDef *letimer, unsigned int rep, uint32_t value) from the emlib can be used to set the values of the repeat registers.3.3.1 Free ModeIn the free running mode, the LETIMER acts as a regular timer, and the repeat counter is disabled. The LETIMER can be started by writing the START bit in LETIMERn_CMD and runs until it is stopped using the STOP bit in the same register.3.3.2 One-shot ModeThe one-shot repeat mode is the most basic repeat mode. In this mode, the repeat register LETIMERn_REP0 is decremented every time the timer underflows, and the timer stops when LETIMERn_REP0 goes from 1 to 0. In this mode, the timer counts down LETI-MERn_REP0 times, i.e. the timer underflows LETIMERn_REP0 times. LETIMERn_REP0 can be written while the timer is running to allow the timer to run for longer periods at a time without stopping.The Buffered repeat mode allows buffered timer operation. When started, the timer runs LETIMERn_REP0 number of times. If LETI-MERn_REP1 has been written since the last time it was used and it is nonzero, LETIMERn_REP1 is then loaded into LETI-MERn_REP0, and counting continues the new number of times. The timer keeps going as long as LETIMERn_REP1 is updated with a nonzero value before LETIMERn_REP0 is finished counting down. If the timer is started when both LETIMERn_CNT and LETI-MERn_REP0 are zero but LETIMERn_REP1 is non-zero, LETIMERn_REP1 is loaded into LETIMERn_REP0, and the counter counts the loaded number of times.3.3.4 Double ModeThe Double repeat mode works much like the one-shot repeat mode with the difference that the LETIMER counts as long as either LETIMERn_REP0 or LETIMERn_REP1 is larger than 0.3.4 Clock SourceThe LETIMER clock source and its prescaler value are defined in the Clock Management Unit (CMU). The LFACLKLETIMERn has a frequency given by the equation below where the exponent LETIMERn is a 4 bit value in the CMU_LFAPRESC0 register.f LFACLK_LETIMERn = 32.768/2LETIMERnTo use this module, the LE interface clock must be enabled in CMU_HFBUSCLKEN0, in addition to the module clock. Clock enabling and prescaling is covered in AN0004: Clock Management Unit.3.5 PRS TriggerThe LETIMER can be configured to start on compare match events PRS signal. RTCC compare match event could generate PRS to start the LETIMER.3.6 Underflow Output ActionFor each of the LETIMER outputs an underflow output action can be set. The configured output action is performed every time the counter underflows while the respective repeat register is nonzero. In PWM mode, the output is similarly only changed on COMP1 match if the repeat register is nonzero. The different output actions are shown in the table below.Table 3.2. LETIMER Underflow Output ActionsThe LETIMER outputs must be routed to pins using the LETIMERn_ROUTEPEN and LETIMERn_ROUTELOC0 registers. The selected pins must be enabled as output in the GPIO module. Pin configuration is covered in AN0012: GPIO.3.7 InterruptThere are 5 interrupts available in the LETIMER. One interrupt for when each of the Repeat Counters (REP0 and REP1) reaches zero, one when the LETIMER counter matches the value of each compare register (COMP0 and COMP1), and one when the LETIMER underflows.These interrupts can be enabled, disabled, and cleared using the following functions from the emlib:•LETIMER_IntEnable(LETIMER_TypeDef *letimer, uint32_t flags) enables interrupts•LETIMER_IntDisable(LETIMER_TypeDef *letimer, uint32_t flags) disables interrupts•LETIMER_IntClear(LETIMER_TypeDef *letimer, uint32_t flags) clears interrupts3.8 Register Access and SynchronizationThere are 2 modes to access the low energy peripheral register, they are uses immediate synchronization and immediate synchroniza-tion. For the LETIMER peripheral, the device uses immediate synchronization mode. This doesn’t experience a delay from when a val-ue is written to when it takes effect in the peripheral. The values are updated immediately on the peripheral write access. If such a write is done close to an edge on the clock of the peripheral, the write is delayed to after the clock edge. This will introduce wait-states on the peripheral access.Configuration 4. ConfigurationThe LETIMER can be easily and quickly configured using LETIMER_Init(LETIMER_TypeDef *letimer, const LETIMER_Init_TypeD ef *init) function from emlib. This function allows the configuration of the following parameters:•Start counting when the initialization is complete•Counter running during debug•Use COMP0 register as TOP value•Load COMP1 to COMP0 when REP reaches 0•Idle value for output 0•Idle value for output 1•Underflow output 0 action•Underflow output 1 action•Repeat mode5. Software ExamplesThis software example project in this application note are intended for EFM32 Starter Kits (STK) and the EFR32MG radio board. Each project contains three test modes demonstrating the LETIMER features.The output pins are available in the expansion or breakout headers for different STKs and radio boards in the table below.Table 5.1. Output Pin Map5.1 PWM and pulse OutputIn PWM mode the LETIMER is configured to run in free mode with PWM on output 1 and pulses on output 0. The value of COMP0 is used as TOP value for the counter and is loaded after each underflow. Using underflow interrupts, the value of COMP1 is decremented throughout the program execution resulting in a variable PWM duty-cycle.The PWM frequency and duty-cycle can be obtained using the formulas below.PWM Frequency Equationf PWM = 32768 / TOPPWM Duty-cycle EquationDS PWM = COMP1 / COMP0 x 100The purpose of this example is to demonstrate how the LETIMER can be used to output PWM and/or pulses with little CPU intervention while keeping the energy consumption to a minimum.5.2 RTCC PRS Triggered CounterThe RTCC mode demonstrates how the RTCC PRS can be used to trigger the LETIMER. The LETIMER is configured to start with counting on a PRS signal. RTCC COMP0 match was configured to generate the PRS event. The LETIMER was configured to generate pulses on output 0 and One-shot repeat mode. The figure below illustrates the program flow.Figure 5.1. RTCC TriggerThe RTCC generates a compare match PRS event after 5 seconds (RTC_COMP0 = 5) of program execution which will trigger the LE-TIMER to start counting. The LETIMER will count down while LETIMERn_REP0 != 0 generates a pulse on each underflow. For this project, LETIMER_REP0 has the value of 5 so there will be 5 pulses.Note: The RTCC continues counting after the compare match. If it wraps around the top value and generates a new compare match the LETIMER will not be triggered because LETIMERn_REP0 = 0.5.3 GPIO PRS Start, Stop counterThe GPIO mode demonstrates how the GPIO can be used to start and stop the LETIMER through PRS function. The LETIMER is con-figured to start counting when push button 0 is pushed, with pulses on output and free mode, in the meantime the LETIMER is config-ured to stop counting when push button 1 is pushed.AN0026.1: EFM32 and EFR32 Wireless SOC Series 1 Low Energy TimerRevision History 6. Revision HistoryRevision 1.08February, 2018•Split AN0026 into AN0026.0 and AN0026.1 for MCU/Wireless Series 0 and MCU/Wireless Series 1 respectively.•Added support for EFM32 Series 1 and EFR32 Series 1 devices.•Added more feature projects.•Re-organized the example code structure.Revision 1.07May, 2014•Updated example code to CMSIS 3.20.5•Changed to Silicon Labs license on code examples•Added project files for Simplicity IDE•Removed makefiles for Sourcery CodeBench LiteRevision 1.06September, 2013•New cover layout.Revision 1.05May, 2013•Added software projects for ARM-GCC and Atollic TrueStudio.Revision 1.04November, 2012•Adapted software projects to new kit-driver and bsp structure.•Added projects for Tiny and Giant Gecko STKs.Revision 1.03August, 2012•Added projects for Tiny and Giant Gecko STKs.Revision 1.02April, 2012•Adapted software projects to new peripheral library naming and CMSIS_V3.Revision 1.01October, 2011•Updated IDE project paths with new kits directory.Revision 1.00December, 2010•Initial revision. Silicon Laboratories Inc.400 West Cesar Chavez Austin, TX 78701USASmart. Connected. Energy-Friendly .Products /products Quality /quality Support and Community Disclaimer Silicon Labs intends to provide customers with the latest, accurate, and in-depth documentation of all peripherals and modules available for system and software implementers using or intending to use the Silicon Labs products. Characterization data, available modules and peripherals, memory sizes and memory addresses refer to each specific device, and "Typical" parameters provided can and do vary in different applications. Application examples described herein are for illustrative purposes only. Silicon Labs reserves the right to make changes without further notice and limitation to product information, specifications, and descriptions herein, and does not give warranties as to the accuracy or completeness of the included information. Silicon Labs shall have no liability for the consequences of use of the information supplied herein. This document does not imply or express copyright licenses granted hereunder to design or fabricate any integrated circuits. The products are not designed or authorized to be used within any Life Support System without the specific written consent of Silicon Labs. A "Life Support System" is any product or system intended to support or sustain life and/or health, which, if it fails, can be reasonably expected to result in significant personal injury or death. Silicon Labs products are not designed or authorized for military applications. Silicon Labs products shall under no circumstances be used in weapons of mass destruction including (but not limited to) nuclear, biological or chemical weapons, or missiles capable of delivering such weapons.Trademark Information Silicon Laboratories Inc.® , Silicon Laboratories®, Silicon Labs®, SiLabs® and the Silicon Labs logo®, Bluegiga®, Bluegiga Logo®, Clockbuilder®, CMEMS®, DSPLL®, EFM®, EFM32®, EFR, Ember®, Energy Micro, Energy Micro logo and combinations thereof, "the world’s most energy friendly microcontrollers", Ember®, EZLink®, EZRadio®, EZRadioPRO®, Gecko®, ISOmodem®, Micrium, Precision32®, ProSLIC®, Simplicity Studio®, SiPHY®, Telegesis, the Telegesis Logo®, USBXpress®, Zentri and others are trademarks or registered trademarks of Silicon Labs. ARM, CORTEX, Cortex-M3 and THUMB are trademarks or registered trademarks of ARM Holdings. Keil is a registered trademark of ARM Limited. All other products or brand names mentioned herein are trademarks of their respective holders.。
USB Type-C 规范1.2(中文版)

知识产权声明
THIS SPECIFICATION IS PROVIDED TO YOU “AS IS” WITH NO WARRANTIES WHATSOEVER, INCLUDING ANY WARRANTY OF MERCHANTABILITY, NON-INFRINGEMENT, OR FITNESS FOR ANY PARTICULAR PURPOSE. THE AUTHORS OF THIS SPECIFICATION DISCLAIM ALL LIABILITY, INCLUDING LIABILITY FOR INFRINGEMENT OF ANY PROPRIETARY RIGHTS, RELATING TO USE OR IMPLEMENTATION OF INFORMATION IN THIS SPECIFICATION. THE PROVISION OF THIS SPECIFICATION TO YOU DOES NOT PROVIDE YOU WITH ANY LICENSE, EXPRESS OR IMPLIED, BY ESTOPPEL OR OTHERWISE, TO ANY INTELLECTUAL PROPERTY RIGHTS.
预发行行业审查公司提供反馈
Revision History.......................................................................................................................14
LIMITED COPYRIGHT LICENSE: The USB 3.0 Promoters grant a conditional copyright license under the copyrights embodied in the USB Type-C Cable and Connector Specification to use and reproduce the Specification for the sole purpose of, and solely to the extent necessary for, evaluating whether to implement the Specification in products that would comply with the specification.
Volvo I-Shift 自动变速箱操作手册说明书

I-Shift drive modes and software functionsThe I-Shift gearboxʼs functions are optimized with specially adapted drive modes, which make the gearbox even more practical and economical by adapting the gearshift functional-ity to the current transport conditionsThe driving mode is selected with a button on the gear se-lector. Fuel saving functions are adjusted according to the se-lected drive mode. I-See (optional) speed limits and strategy are adjusted according to the selected drive mode.Drive modes•Economy: Focus on lowering fuel consumption, some re-duction in power. Using I-See function.•Standard: Reasonable fuel consumption without compro-mising drivability. Using I-See function.•Performance: Full power, with less focus on fuel consump-tion.•Off-road: Agility is prioritised.•Heavy duty: Optimised for drivability and comfort at high loads (Heavy Equipment Transport).Sales variantsDrive modeDRM-E I-Shift drive mode economyDRM-BE I-Shift drive mode balanced economyAMT vocation optionAVO-BAS Basic I-Shift softwareAVO-ENH Enhanced I-Shift software including construc-tion and off-road applicationsAVO-HD Enhanced I-Shift software including heavy du-ty, construction and off-road applicationsTransmission performance modeTPM-AUTR Transmission performance mode auto return TPM-MAN Transmission performance mode manual UTPM Without drive mode performance in DRM-BEAMT manual shift optionsAMSO-BAS Basic I-Shift gear shiftingAMSO-AUT I-Shift manual gear shift available in automatic mode incl kickdown functionAMT PTO functionsAPF-BAS Basic I-Shift PTO functionsAPF-ENH Enhanced I-Shift PTO functions (Auto Neu-tral/ Reverse Inhibit / Split Box Connection)FEATURES AND BENEFITS•Optimized drivability.•Reduce fuel consumption.•Reduce CO2 footprint.•Simplify selection of drive modes.FACT SHEETI-Shift drive modesI-Shift drive modes icons in instrument cluster.I-Shift drive modes and software functions● Standard, ○ Option, — Not available1Note! Choice of UTPM gives no Performance drive mode.DRM-E+AVO-BAS is designed for long haul transport to secure a good fuel economy.DRM-BE+AVO-BAS is the versatile offer for the majority of the transport segments.DRM-BE+AVO-ENH is adapted for construction operations.DRM-BE+AVO-HD is specially tailored for heavier transport operations.FACT SHEETI-Shift drive modesI-Shift software functions● Standard, ○ Option, — Not available2Only AT2612, ATO2612, ATO3112 and ATO3512.3For Volvo FH16 or for a Volvo with driven front axle.FACT SHEETI-Shift drive modesI-Shift Drive Mode Economy (DRM-E)DRM-E is optimized for fleet usage were driver influence is limited. To access I-See functionality, PVT-MAP needs to be added.This drive mode restricts the possibility to alter among the drive modes. The DRM-E will be locked in Economy mode. I-Shift Drive Mode Balanced Economy (DRM-BE)This is the base which giving ideal selection for most all ap-plications. To optimize further toward a particular vocation, DRM-BE is selected with AVO-BAS, AVO-ENH or AVO-HD. For customer usages with frequent start and stop like garbage collection, a potential to save fuel is to remove the possibility to access performance driving mode. That variant exist for DRM-BE and is called UTPM.For DRM-BE with UTPM, the performance drive mode is removed and consequently also the option with TPM-AUTR. Other options in DRM-BE with UTPM are available like AVO-ENH/AMSO-AUT/APF-ENH.Basic Vocational Functions (AVO-BAS)Allows the driver to choose between the Economy, Standard and Performance driving modes.Enhanced Performance – Bad Roads (AVO-ENH)This optional package is specially adapted to the specific con-ditions of the construction and timber transport segments. The Off-road mode includes various functions that adapt gearshifts and gear selection to poor driving surfaces and hilly gradients. It also includes functions that facilitate starting from standstill in poor driving conditions.Off-road mode is designed to minimise the number of gearshifts required. This is useful during off-road driving. It prevents wheels from spinning out when torque is increased after a gearshift, and prevents missed gearshifts, for example if the road gradient changes sharply. High engine power (high revs) is often required when driving uphill.The driver can also influence the maximum number of down shifts. This is very useful when you shift to a lower gear on a very steep uphill gradient and only want to shift once to a gear strong enough to take you all the way up. Economy, Standard, Performance and Off-road driving modes are available. Summary of the functions in the package:•Engine revs are increased as necessary to provide extra torque when starting off from standstill.•Larger margins before upshifts ensure safer driving if the gradient changes.•Gear selection is adapted to minimise the number of gearshifts and run at slightly higher revs.•Functions that make it easier to keep the same gear when the accelerator pedal position and road gradient change.•The package enables multiple downshifts. This facilitates gearshifts when driving up steep slopes.•Includes a function that speeds up clutch release and makes it easier to rock the vehicle out of trouble if it gets stuck on a soft surface.•When moving the gear lever, the driver can choose the gear that provides the highest possible engine speed. Enhanced Performance – Heavy duty (AVO-HD)AVO-HD optimizes I-Shift for heavy duty transport with high gross combination weights (>85 tonnes). Regardless of the gross combination weight, the driver can always optimize dri-vability by selecting or deactivating the Heavy Duty mode, and activating the long haul mode. The functions in the software package also offer benefits for trucks hauling multiple trailers. AVO-HD also includes AVO-ENH functions (Off-road mode)but the functions in Off-road are only active when the Heavy Duty mode is inactive.Change DirectionEnables fast change of driving direction in for instance maneuvering situations by change direction functionality. Change direction is to select reverse gear at lower vehicle speed and use the accelerator pedal to brake the vehicle and start reversing without letting the foot of the accelerator pedal. Vice versa applies, i.e. reversing the vehicle and thenFACT SHEETI-Shift drive modespush the gear selector into A/M and use accelerator pedal to come into forward driving. Pressing the accelerator pedal more makes the event of changing driving direction to occur faster. Change Direction is activated up to 30 km/h.Note! Change Direction requires AVO-ENH or AVO-HD. Terrain BrakeTerrain brake gives improved off-road agility for Volvo FH16 or for a Volvo with driven front axle.With this function, the driver controlling the vehicle better. For instance, rolling off a stone in terrain, is made in a con-trolled manor by the driver activation.Terrain brake means that the brake is applied when the ac-celerator pedal is released and consequently holds the truck in the position inhibiting free rolling. Terrain brake can be en-gaged below 4 km/h, i.e. at low speeds. Applied terrain brake force is controlled by the retarder brake lever position on the steering column.Note! Terrain Brake requires AVO-ENH or AVO-HD. Transmission Performance Mode Auto Return (TPM-AUTR)Transmission performance mode AUTR. Auto return to drive mode Economy.Enable manual switch (TPM-MAN)Transmission performance mode MAN. Enable manual switch between Economy and Performance mode.Basic Gear Selection Adjustment (AMSO-BAS) Allows the driver to adjust gear selection with the gear lever buttons during engine braking in Automatic mode (gear selec-tor position A).Enhanced Gear Selection Adjustment,incl. Kickdown (AMSO-AUT)This function allows both the automatically selected starting gear and the driving gear in Automatic mode to be adjusted by activating the plus/minus button on the gear lever.The kickdown function selects a gear for maximum acceler-ation. When the kickdown switch on the accelerator pedal is engaged, the system changes the gearshift strategy to max-imise vehicle acceleration. When suitable (e.g. depending on engine speed), this leads to a downshift.Basic PTO Functions (APF-BAS)Facilitates power take-off operation. Pre-defined splitter gear positions determine which splitter gear is used when one or two gearbox power take-offs are engaged.Because gear selection is matched to the engine speed lim-it, it is possible to set parameters for the software. The gear selection is then adapted to any engine speed limits imposed by body-builder functions.Enhanced PTO Functions (APF-ENH)Several functions that aid power take-off operation. I-Shiftʼs power take-off functions make it possible to activate the prop-erties listed below by having the software parameters adjust-ed at an authorised workshop.•Auto Neutral: On command, the driveline is disconnected from the bodybuilder control unit, regardless of the gear leverʼs position, when Auto Neutral is activated.•Reverse Inhibit: When the bodybuilder control unit is-sues the Reverse Inhibit command, the reverse gears are blocked by the transmission system.•Connection of splitter box: Allows connection of a splitter box for operation of high-capacity power take-offs. Direct gear is activated when the bodybuilder module is put in splitter box mode. It is also possible to use all high range gears. Please look into the body builder instructions. Performance ShiftGives faster, gentler shifts through intelligent utilisation of the engineʼs compression brake (VEB brakes), the vehicleʼs clutch and a special gearbox brake.Automatic selection of correct starting gear (1st – 6th gear)is included. The choice of starting gear is determined by gross vehicle weight and road gradient.Gearbox Oil Temperature MonitorContinuously shows the gearbox oil temperature in the infor-mation display.Heavy Start EngagementFor start-up with high revs in Performance mode in 1st gear,resulting in higher starting torque. This function raises the revs to facilitate heavy starts. This is useful, for instance, if the truck is stuck in soft ground.I-RollAutomatic activation and deactivation of a freewheel function in order to cut fuel consumption, which can be reduced by up to several percent. I-Roll is used when neither engine power nor engine braking is needed, for instance on flat roads. When driving with cruise control, I-Roll runs at roughly 1–3 km/h be-low the pre-set speed, which saves fuel. The longer the vehi-FACT SHEETI-Shift drive modescle drives using I-Roll, the more fuel is saved.Smart Cruise ControlInteracts with the vehicleʼs Brake Cruise and ensures that the auxiliary brakes are not activated unnecessarily. The auxiliary brakes are deactivated on downhill stretches to save fuel. This allows increased use of the freewheel function, resulting in improved fuel efficiency.Downhill Cruise ControlDownhill Cruise Control sets a maximum speed to control the vehicle speed in a down-hill.Downhill Cruise Control primarily uses the auxiliary brakes such as the Volvo Engine Brake or the retarder to make sure that the selected speed is not exceeded. Only when required, the wheel brakes are applied.The driver can still use the brake pedal to further lower the speed without deactivating the system.Launch ControlOptimizes gear selection and EBS functions when manoeu-vring at low speeds. Manoeuvring is facilitated because the EBS brakes are automatically engaged when the truck changes direction. This also ensures that the Auto Hold func-tion is activated.It is possible to drive the vehicle forward with the idle regu-lator. This saves unnecessary downshifts and makes it easier to adjust the vehicleʼs speed, for instance when driving in traf-fic queues.Enhanced Shift Strategy4By interacting with EBS 5 and ECS 6, both starting and ma-noeuvring are made easier.This brake mode maximises VEB/VEB+/retarder braking effects by automatically selecting the appropriate gear so the engine runs at high revs. This function compensates for the engine brake when changing gears in brake mode.When changing gears during engine braking, the wheel brakes are activated to compensate for braking moment. This raises braking power and provides smoother gearshifts. Interaction with the braking systems increases safety by preventing the truck from accelerating during gearshifts on steep slopes when braking mode is activated.Heavy Duty GCW Control7Optimizes gear selection for high gross combination weights(according to heavy haulage document). This function improves drivability and fuel economy in the heavy duty trans-port segment. Heavy Duty GCW Control gives the driver ac-cess to the HD (Heavy Duty) driving mode.In HD mode, 1st gear is used as the starting gear and gear selection is adapted to heavier gross combination weights. The gearshifts generally occur at higher revs. HD is activat-ed and deactivated by pressing and holding the modes button on the gear selector for about 3 seconds. The chosen driving mode remains selected when the engine is turned off. Among other things, the DRM-BE-AVO-HD function se-lects the starting gear to suit the gross combination weight, thereby saving the clutch. The entire gear range is utilised, and the gears are changed consistently at high revs to maintain torque and driving comfort.When driving with low gross combination weights or with-out a load, it is easy to deactivate the HD driving mode and return to Economy mode. After this, the driver can switch be-tween available drive modes. This ensures comfortable and fuel efficient driving.Heavy ModeHeavy mode function for trucks with I-Shift - having rear axle RTH3815 - regardless of emission class is as follows:•For driving without load all drive modes can be used.•For driving with load all drive modes - except Economy -can be used. When driving downhill with load - the gear-box shifts down, corresponding to retarder lever position 3. The purpose of downshift is to raise the engine speed to provide more engine braking power to the truck.4 Full functionality requires EBS-MED.5 EBS = Disc Brakes with Electronically controlled Brake System (EBS-STD / EBS-MED)6 ECS = Electronically Controlled Suspension (SUSPL-EC).7 Available only with certain engine/gearbox combinations.Volvo Tech ToolI-Shiftʼs software packages can easily be installed and changed with the help of Volvoʼs analysis and programming tool, Volvo Tech Tool. This is done by authorised dealers and workshops,where the software packages can be further cus-tomised with optional functions and customer parameters. Customer parametersI-Shift also has many options for setting customer parame-ters that optimize the vehicleʼs driving properties in specialFACT SHEETI-Shift drive modesapplications and special transport segments. For instance,the starting gear can be optimized according to the transport conditions. Power take-off operation can also be customised.Customised settings and reprogramming of I-Shift are car-ried out at authorised workshops using the Volvo Tech Tool.FACT SHEETI-Shift drive modes。
2.2 The Factor Theorem

Ϫ_21
2
Ϫ
3
Ϫ_21
Ϫ2
ϭ
Ϫ
_1 4
ϩ
_3 4
ϩ
_3 2
Ϫ
2
ϭ0
Since the remainder is zero, 2x ϩ 1 is a factor of P(x).
Method 2: Use a Graphing Calculator
Enter the function y ϭ 2x3 ϩ 3x2 Ϫ 3x Ϫ 2 in Y1.
96 MHR • Advanced Functions • Chapter 2
Consider the polynomial P(x) ϭ x3 ϩ 2x2 Ϫ 5x Ϫ 6.
ϭ 27 Ϫ 9 Ϫ 42 ϩ 24 ϭ0
Since the remainder is zero, P(x) is divisible by x Ϫ 3; that is, x Ϫ 3 divides evenly into P(x), and x Ϫ 3 is a factor of P(x). P(Ϫ2) ϭ (Ϫ2)3 Ϫ (Ϫ2)2 Ϫ 14(Ϫ2) ϩ 24
Investigate How can you determine a factor of a polynomial?
Tools
• calculator with a computer algebra system (optional)
1. a) Use the remainder theorem to determine the remainder when x3 ϩ 2x2 Ϫ x Ϫ 2 is divided
Ice carvers from across Canada and around the world come to Ottawa every year to take part in the ice-carving competition at the Winterlude Festival. Some artists create gigantic ice sculptures from cubic blocks of ice with sides measuring as long as 3.7 m.
Altium designer 仿真具体步骤
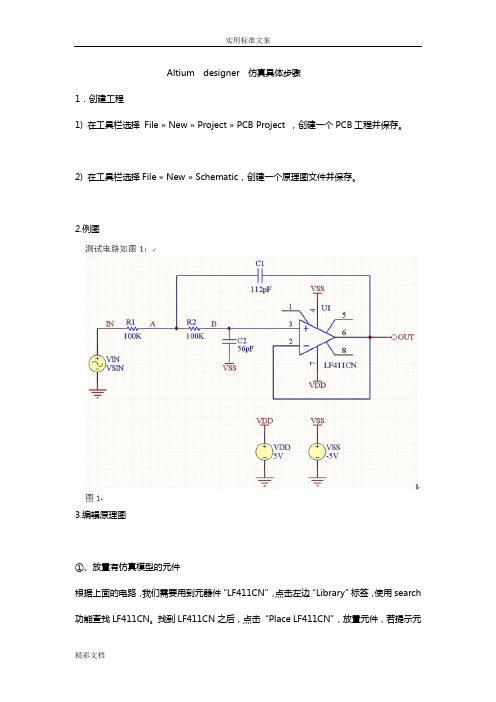
Altium designer 仿真具体步骤1.创建工程1) 在工具栏选择File » New » Project » PCB Project ,创建一个PCB工程并保存。
2) 在工具栏选择File » New » Schematic,创建一个原理图文件并保存。
2.例图3.编辑原理图①、放置有仿真模型的元件根据上面的电路,我们需要用到元器件“LF411CN”,点击左边“Library”标签,使用search 功能查找LF411CN。
找到LF411CN之后,点击“Place LF411CN”,放置元件,若提示元件库未安装,需要安装,则点击“yes”,如图2:在仿真元件之前,我们可以按“TAB”键打开元件属性对话框,在“Designator”处填入U1;接着查看LF411CN的仿真模型:在左下角Models列表选中Simulation,再点击“Edit”,可查看模型的一些信息,如图3。
从上图可以看出,仿真模型的路径设置正确且库成功安装。
点击“Model File”标签,可查看模型文件(若找不到模型文件,这里会有错误信息提示),如图4。
图4点击“Netlist Template”标签,可以查看网表模板,如图5。
图5至此,可以放置此元件。
②、为元件添加SIM Model文件用于电路仿真的Spice模型(.ckt和.mdl文件)位于Library文件夹的集成库中,我们使用时要注意这些文件的后缀。
模型名称是模型连接到SIM模型文件的重要因素,所以要确保模型名称设置正确。
查找Altium 集成库中的模型文件步骤如下:点击Library面板的Search按钮,在提示框中填入:HasModel('SIM','*',False)进行搜索;若想更具体些可填入:HasModel('SIM','*LF411*',False)。
基于虚拟试验场的牵引车动态载荷研究
2024年第1期27doi:10.3969/j.issn.1005-2550.2024.01.005 收稿日期:2023-10-27基于虚拟试验场的牵引车动态载荷研究王庆华1,王丽荣2,陈小华2,李蒙然1,黄刚1(1.国家汽车质量检验检测中心(襄阳),襄阳441004;2. 北京福田戴姆勒汽车有限公司,北京 101400)摘 要:基于Adams软件的虚拟试验场动态载荷分解技术在乘用车耐久性能开发领域广泛应用。
对于重卡车型,由于车辆模型复杂、参数有限且测试难度大,虚拟试验场技术的应用推广受到限制。
搭建某牵引车整车多体动力学模型及虚拟试验场仿真环境,同时采集试验场工况下的实车载荷谱数据并与虚拟试验场动力学仿真分析提取的动态载荷进行对比。
使用相对伪损伤比值、频谱分析等评估比利时、扭曲路、搓板路等典型路面工况下仿真与实测载荷谱数据的差异。
结果表明:基于虚拟试验场的动态载荷提取技术可应用于牵引车车型且可实现较高的精度,是一种获取试验场耐久工况载荷谱的有效方法。
关键词:虚拟试验场;载荷分解;路面模型;牵引车中图分类号:U467 文献标识码:A 文章编号:1005-2550(2024)01-0027-07Research on Dynamic Load of Tractor Based on VPGWANG Qing-hua1, WANG Li-rong2, CHEN Xiao-hua2, LI Meng-ran1, HUANG Gang1(1.National Automobile Quality Inspection and T est Center (Xiangyang), Xiangyang 441004,China; 2. Beijing Foton Daimler Automobile Co., Ltd, Beijing 101400, China)Abstract: The dynamic load decomposition technology of VPG based on Adams is widely applied in the field of passenger car durability performance development. For heavytruck, the application and promotion of VPG are limited due to the complexity of vehiclemodels, limited parameters, and high RLDA testing difficulty. The complete vehicle multi-body dynamics model of a tractor and virtual proving ground simulation environment arebuilt based on Adams. The real vehicle load data acquisition of the proving ground eventswas carried out and compared with the dynamic loads extracted from dynamic simulationanalysis of the virtual proving ground to verify the model accuracy and load accuracy.Relative pseudo damage ratio, RMS value ratio, and spectrum analysis were used to evaluatethe differences between simulated and measured load data under typical road conditionssuch as Belgium, twisted roads, and washboard roads. It is proved that The dynamic loadextraction technology based on virtual proving ground can be applied to tractor models andachieve high accuracy, which is an effective method for obtaining the load data of provingground durability events.Key Words: Virtual Proving Ground; Load Extraction; Road Model; Tractor随着高精度路面扫描和轮胎力学模型建模等技术快速发展,基于虚拟试验场(V i r t u a l Proving Ground)的动态载荷提取技术在车型开发早期阶段即可开展,可有效缩短开发周期和试验成本[1-4]。
DS2208数字扫描器产品参考指南说明书
-05 Rev. A
6/2018
Rev. B Software Updates Added: - New Feedback email address. - Grid Matrix parameters - Febraban parameter - USB HID POS (formerly known as Microsoft UWP USB) - Product ID (PID) Type - Product ID (PID) Value - ECLevel
-06 Rev. A
10/2018 - Added Grid Matrix sample bar code. - Moved 123Scan chapter.
-07 Rev. A
11/2019
Added: - SITA and ARINC parameters. - IBM-485 Specification Version.
No part of this publication may be reproduced or used in any form, or by any electrical or mechanical means, without permission in writing from Zebra. This includes electronic or mechanical means, such as photocopying, recording, or information storage and retrieval systems. The material in this manual is subject to change without notice.
SMC 压力开关说明书

Other SettingsSummary of Product partsSimple Setting ModeTroubleshootingNote: Specifications are subject to change without prior notice and any obligation on the part of the manufacturer.© 2017 SMC Corporation All Rights ReservedAkihabara UDX 15F, 4-14-1, Sotokanda, Chiyoda-ku, Tokyo 101-0021, JAPANPhone: +81 3-5207-8249 Fax: +81 3-5298-5362URL Specifications/Outline with Dimensions (in mm)Refer to the product catalog or SMC website (URL ) for moreinformation about the product specifications and outline dimensions.PS※※-OMU0004 InstallationMountingMount the optional bracket and panel mount adapter to the pressure switch.When the pressure switch is to be mounted in a place where water and dustsplashes occur, insert a tube into the air-relieving port of the pressure switch.(Refer to "Tube attachment")Mounting with bracketMount the bracket to the body with mounting screws (Self tapping screws:Nominal size 3 x 8L (2 pcs)), then set the body to the specified position.∗: Tighten the bracket mounting screws to a torque of 0.5±0.05 Nm.Self tapping screws are used, and should not be re-used several times.∗: The panel mount adaptercan be rotated through 90degrees for mounting.•Bracket A (Part No.: ZS-46-A1)•Bracket B (Part No.: ZS-46-A2)Mounting with panel mount adapterMount part (a) to the front of the body and fix it. Then insert the body with (a) intothe panel until (a) comes into contact with the panel front surface. Next, mountpanel for fixing.•Panel mount adapter(Part No.: ZS-46-B)Panel mount adapter +Front protective cover(Part No.: ZS-46-D)WiringWiring connectionsUse a separate route for the product wiring and any power or high voltage wiring.Otherwise, malfunction may result due to noise.If a commercially available switching power supply is used, be sure to ground theframe ground (FG) terminal. If the switching power supply is connected for use,switching noise will be superimposed and it will not be able to meet the productspecifications. In that case, insert a noise filter such as a line noise filter/ferritebetween the switching power supplies or change the switching power supply tothe series power supply.How to use connectorConnector attachment/detachmentWhen connecting the connector, insert itstraight onto the pins, holding the lever andconnector body, and lock the connector bypushing the lever hook into the concavegroove on the housing.To detach the connector, remove the hookfrom the groove by pressing the leverdownward, and pull the connector straight out.DC(+)OUT1OUT2FUNCDC(-)BrownBlackWhiteGrayBluePipingTightening the connection threadFor connecting to the body (piping specification: -M5)After hand tightening, apply a spanner of the correct size tothe spanner flats of the piping body, and tighten with a 1/6 to1/4 rotation.As a reference, the tightening torque is 1 to 1.5 Nm.(When replacing the piping adapter ZS-46-N∗, tighten it usingthe same method.)Piping specification: -01, -N01After hand tightening, hold the hexagonal spanner flats of thepressure port with a spanner, and tighten with 2 to 3 rotations.As a reference, the tightening torque is 3 to 5 Nm.When tightening, do not hold the pressure switch body with aDefault settingsWhen the pressure exceeds the setvalue, the switch will be turned on.When the pressure falls below theset value by the amount ofhysteresis or more, the switch willbe turned off. The default setting isto turn on the pressure switch whenthe pressure reaches the centre ofthe atmospheric pressure and upper limit of the rated pressure range. If this condition,shown to the right, is acceptable, then keep these settings.Error indication functionThis function is to display error location and content when a problem or error has occurred.above are displayed, please contact SMC.Refer to the SMC website (URL ) for more information abouttroubleshooting.Power is supplied.button between1 and 3 sec.∗:The outputs will continue to operate during setting.∗:If a button operation is not performed for 3 seconds during the setting, the display will flash.(This is to prevent the setting from remaining incomplete if, for instance, an operator were to leave duringsetting.)∗:3 step setting mode, simple setting mode and function selection mode settings are reflected each other.[3 step setting mode (hysteresis mode)]orcan be changed in the same way.button once when the item to beThe set value on the sub display (right) will startflashing.orbutton.buttons are pressed and held simultaneously for 1 second orlonger, the set value is displayed as [- - -], and the set value will be the same as thecurrent pressure value automatically (snap shot function).Afterwards, it is possible to adjust the value by pressing button.button to complete the setting.The pressure switch turns on within a set pressure range (from P1L to P1H) duringwindow comparator mode.Set P1L, the lower limit of the switch operation, and P1H, the upper limit of the switchoperation and WH1 (hysteresis) following the instructions given above.(When reversed output is selected, the sub display (left) shows [n1L] and [n1H].)∗:Set OUT2 in the same way. (ex. P_2, H_2)∗:Setting of the normal/reverse output switching and hysteresis/window comparator mode switchingare performed with the function selection mode [F 1] OUT1 setting and [F 2] OUT2 setting.value[F 0] Units selection functionPeak/bottom value indicationbutton inmeasurement mode.Snap shot functionbuttons for 1 secondor longer simultaneously. Then, the set value of the sub display (right) shows [- - -], andthe values corresponding to the current pressure values are automatically displayed.Zero-clear functionbuttons are pressed for 1 second orlonger simultaneously, the main display shows [- - -], and the reset to zero.The display returns to measurement mode automatically.Key-lock functionTo set each of these functions, refer to the SMC website(URL ) for more detailed information, or contact SMC.button between 1 and 3 seconds in measurementmode. [SEt] is displayed on the main display. When the button is releasedwhile in the [SEt] display, the current pressure value is displayed on themain display, [P_1] or [n_1] is displayed on the sub display (left), and theset value is displayed on the sub display (right) (Flashing).or button to(The snap shot function can be used.)or button to set the(The snap shot function can be used.)or button, the delay time of the switch output can be selected.button for 2 seconds or longer to complete the setting.∗:If the button is pressed for less than 2 seconds, the setting will moves to the OUT2 setting.In the window comparator mode, set P1L, the lower limit of the switch operation, andP1H, the upper limit of the switch operation, WH1 (hysteresis) and dt1 (delay time)following the instructions given above.(When reversed output is selected, the sub display (left) shows [n1L] and [n1H].)∗:Set OUT2 in the same way.Function selection modebuttonbetween 3 and 5 seconds, to display [F 0].Select to display the function to be changed[F button for 2seconds or longer in function selection modeto return to measurement mode.∗:Some products do not have all the functions. If no functionis available or selected due to configuration of otherfunctions, [- - -] is displayed on the sub display (right).Names of individual partsRefer to the product catalog or SMC website (URL ) for moreinformation about panel cut-out and mounting hole dimensions.Pressure Setting3 Step Setting Mode(URL ) for more detailed information, or contact SMC.MaintenanceHow to reset the product after a power cut or forcible de-energizingThe setting of the product will be retained as it was before a power cut or de-energizing.The output condition is also basically recovered to that before a power cut or de-energizing, but may change depending on the operating environment. Therefore, checkthe safety of the whole installation before operating the product. If the installation is usingaccurate control, wait until the product has warmed up (approximately 10 to 15 minutes). Safety InstructionsBefore UseDigital Pressure SwitchZSE20B(F)/ISE20BThank you for purchasing an SMC ZSE20B(F)/ISE20B Series Digital Pressure Switch.Please read this manual carefully before operating the product and make sure youunderstand its capabilities and limitations. Please keep this manual handy for futurereference.Safety InstructionsThese safety instructions are intended to prevent hazardous situations and/orequipment damage.These instructions indicate the level of potential hazard with the labels of "Caution","Warning" or "Danger". They are all important notes for safety and must be followed inaddition to International standards (ISO/IEC) and other safety regulations.OperatorSwitch ONAt normal output Switch OFFSet valueP_1HysteresisH_1TimePressureDefault settingThe default setting is as follows.If no problem is caused by this setting,keep these settings.Connector pin numbers[F 2] Setting of OUT2Same setting as [F 1] OUT1.NOTE•The direct current power supply to be used should be UL approved as follows:Circuit (of Class 2) which is of maximum 30 Vrms (42.4 V peak), with UL1310 Class2 power supply unit or UL1585 Class 2 transformer.•The product is a UL approved product only if it has a mark on the body.Tube attachmentWhen this pressure switch is used in a place wherewater and dust splashes may occur, insert a tube in theair-relieving port, and bring piping of the opposite sideup to the safe position to keep it from water and dust.(See the right figure.)∗: The tube should be inserted to the end of the air-relieving port.∗: SMC TU0425 (polyurethane, O.D ø4, I.D ø2.5) is a suitable tubing.。
National Instruments(NI)电路设计套餐版本10.0 Release Notes
RELEASE NOTESNI Circuit Design SuiteVersion 10.0These release notes contain system requirements for NI Circuit Design Suite 10.0,as well as information about product tiers, new features, documentation resources,and other changes since Multicap 9.0, Multisim 9.0, and Ultiboard 9.0.NI Circuit Design Suite includes the following familiar Electronics Workbenchsoftware products: NI Multisim, NI Ultiboard, and the NI Multisim MCU Module(formerly MultiMCU).ContentsInstalling NI Circuit Design Suite 10.0 (2)Minimum System Requirements (2)Installation Instructions (2)Product Activation (3)What’s New in NI Circuit Design Suite 10.0 (3)Mouse-Click Support for Interactive Components (3)Convergence Assistant (4)Increased Quality and Breadth of the Component Database (4)New Components from Leading Manufacturers (4)Generic Power Simulation Parts (4)Bipolar Sources (4)Graphical LCD (5)Single Symbol Representations of Standard Logic Components (5)Enhancements to Passive Components (5)Extended SPICE Modeling Capabilities (5)Parameterized SPICE models (5)Improved Support of Behavioral Sources (5)Support for BSIM 4 Parameters (6)Enhanced Data Visualization (6)Advanced Functionality of Static Probes (6)Add Traces to Grapher after Running Analyses (6)Display Initial Conditions on the Schematic (6)Current Probe Instrument (6)Enhanced Analysis Capabilities (6)Extended Language Support and File Management in the MCU Module (7)Improvements to Speed and Quality of NI Ultiboard (7)Advanced Options for Exported Data Interpolation (7)Miscellaneous Features (8)Unicode Characters (8)NI Installation and License Management (8)Product Tier Details (8)Documentation (14)Installing NI Circuit Design Suite 10.0This section describes the system requirements and installation procedures forNI Circuit Design Suite.Minimum System RequirementsTo run NI Circuit Design Suite 10.0, National Instruments recommends that yoursystem meet the following requirements:•Windows 2000 Service Pack 3 or later, or Windows XP•Pentium 4 class microprocessor or equivalent (Pentium III class minimum)•512 MB of memory (256 MB minimum)• 1.5 GB of free hard disk space (1 GB minimum)•Open GL® capable 3D graphics card recommended (SVGA resolution videoadapter with 800×600 video resolution minimum, 1024×768 or higherpreferred)•To develop custom LabVIEW based instruments for use in Multisim,LabVIEW 8.0.x or higher is requiredInstallation InstructionsThe NI Circuit Design Suite 10.0 installer installs all products in the suite:Multisim, Ultiboard, and the Multisim MCU Module.National Instruments recommends that you close all open applications before youinstall NI Circuit Design Suite.Unless you specify another location during installation, the NI Circuit DesignSuite installation program copies files to <Program Files>\NationalNI Circuit Design Suite Release Instruments\Circuit Design Suite10.0 after you complete thefollowing steps:1.Insert the NI Circuit Design Suite CD into the CD-ROM drive. If the CDstartup screen is not visible, select Run from the Windows Start menu and runsetup.exe from your CD.2.Follow the instructions in the dialog boxes.Product ActivationWhen you run a product in the NI Circuit Design Suite for the first time, it willprompt you to activate a license for that product.Note: To run the Multisim MCU Module, place a component from the MCUModule group on a Multisim circuit or open a Multisim file that contains acomponent from the MCU Module group.If you do not activate a valid license, the product will run in Evaluation Mode andcontinue to prompt you to activate a license on each subsequent run. EvaluationMode is valid for 30 days following the first run of the product.For information about how to activate your software product, please refer to theActivation Instructions for National Instruments Products Note to Users includedwith your NI Circuit Design Suite 10.0 package.What’s New in NI Circuit Design Suite 10.0This document describes the following new features ofNI Circuit Design Suite 10.0:•Mouse-Click Support for Interactive Parts•Convergence Assistant•Increased Quality and Breadth of the Component Database•Extended SPICE Modeling Capabilities•Enhanced Data Visualization•Extended Analysis Capabilities•Extended Programming and File Management in the MCU Module•Improvements to Speed and Quality of NI Ultiboard•Advanced Options for Exported Data Interpolation•Miscellaneous FeaturesMouse-Click Support for Interactive ComponentsNI Multisim 10.0 lets you use your mouse to control interactive componentsduring simulation. You can click on switches to toggle them, push keypad buttonswith the mouse, and adjust the value of the variable components, such asNational Instruments Corporation3NI Circuit Design Suite Release Notespotentiometers, with a slider bar. You may also continue to use keyboard controlsfor these devices.Convergence AssistantThe Convergence Assistant adjusts simulation settings when a "Time Step TooSmall" error occurs during interactive simulation. The assistant adjusts theminimum number of parameters required in order to allow convergence of thesimulation. The assistant adjusts the following parameters:1.Initial Condition2.TMAX3.RELTOL4.RSHUNT5.ITL16.Integration method7.GMINIncreased Quality and Breadth of the Component DatabaseNI Multisim 10.0 has a number of new additions and improvements to thecomponent database. These include: around 1,000 new components from leadingmanufacturers, generic power simulation parts, new bipolar sources, a GraphicalLCD, single symbol representations of standard logic components, andimprovements to passive components.New Components from Leading ManufacturersNI Multisim 10.0 has approximately 1,000 new components with models fromAnalog Devices, Texas Instruments, and Linear Technologies. These additionsinclude symbols, models, and IPC-standard landpatterns. Components includeoperational-amplifier, comparator, and voltage reference models.Generic Power Simulation PartsNI Multisim 10.0 includes models for all power simulation parts found in the"Switch-Mode Power Supply SPICE Cookbook" by Christophe Basso. Thesecomponents include Buck, Boost, Buck-Boost, and PWM controllers. Theirmodels include voltage and current mode controlled devices, and models foraverage and detailed transient operation.Bipolar SourcesNew bipolar pulse sources include both current and voltage sources.NI Circuit Design Suite Release Graphical LCDA Graphical LCD is available for users who purchase the MCU Module inconjunction with NI Multisim. The command system for the Graphical LCDfollows the Toshiba T6963C. The graphical LCD is a two-color device with 256 x256 pixel display resolution. This device supports three modes of operation:text-only, graphics-only, and mixed text and graphics.Single Symbol Representations of Standard LogicComponentsIn addition to the multi-section component representation of standard logiccomponents such as logic gates and flip-flops, the component database nowincludes single symbol representations of common components. Thesesingle-symbol representations show the power and ground pins of these devices.Enhancements to Passive ComponentsYou can now change the value of any resistor, capacitor, or inductor placed on theschematic without replacing it. You can also assign a landpattern to any passivecomponent. You can assign information about the type of component, for instancemetal-oxide, and this information propagates to the Bill of Materials. Thetolerance of the components is automatically available for Monte-Carlo and WorstCase analyses, and you can edit the tolerances in the spreadsheet.An advanced non-linear inductor model lets you define the inductor characteristicsbased on datasheet values.Extended SPICE Modeling CapabilitiesNI Multisim 10.0 introduces enhancements to its SPICE modeling capabilities,including parameters in SPICE subcircuit models, improved support of behavioralsources, and support for BSIM 4 parameters.Parameterized SPICE modelsYou may now define parameters in the .subcircuit line of SPICE macro-models inNI Multisim. The definition of parameters is as follows..subckt<subckt_name><node_list>PARAMS:param_name=value,...You may then use the parameter name in place of a value in the macro-model. Thevalue of the parameter is editable in the component dialog on the schematic.Improved Support of Behavioral SourcesBehavioral sources now support nested instances of IF statements.National Instruments Corporation5NI Circuit Design Suite Release NotesSupport for BSIM 4 ParametersNI Multisim 10.0 supports the standard BSIM 4 parameters for MOSFET models.BSIM 4 supports up to 400 parameters. More information about BSIM 4 isavailable at /~bsim3/bsim4.html.Enhanced Data VisualizationNI Multisim 10.0 includes a number of improvements to the way you configureand view results. These include: advanced functionality of the static probes, theability to add traces to the Grapher after running a simulation, the ability to displaythe initial conditions of components on the schematic, a current probe instrument,and improvements to the memory and register displays of MCUs.Advanced Functionality of Static ProbesPlaced (static) probes now include a reference designator, which allows you toselect another probe as a reference net. In previous versions of NI Multisim, allprobes referenced ground. You can also use probe reference designators to selectwhich traces to view in analyses.Add Traces to Grapher after Running AnalysesYou can add traces to the Grapher view after running an analysis, and select whattype of data you want NI Multisim to store.Display Initial Conditions on the SchematicYou can choose to display the initial conditions of capacitors and inductors on theschematic.Current Probe InstrumentThe current probe instrument is a virtual representation of a real current probe thatconnects to an oscilloscope. You connect one end of the probe to a net on theschematic and the other to the input to an oscilloscope. You can set the ratio ofamps to volts displayed on the instrument. Note that the units remain in volts onthe oscilloscope.Enhanced Analysis CapabilitiesNI Multisim 10.0 now allows you to evaluate more expressions before and afterrunning analyses. The definitions of the expressions are:1.avg(X) — Running average of the vector X2.avg(X, d) — Running average of the vector X over dNI Circuit Design Suite Release 3.envmax(X, n) — Upper envelope of the vector X where n is the number ofpoints on either side of a peak that must be less than the value for a peak to beidentified4.envmin(X, n) — Lower envelope of the vector X where n is the number ofpoints on either side of a peak that must be less than the value for a peak to beidentified5.grpdelay(X) — Group delay of X with results in seconds6.rms(X) — Running RMS average of vector X7.integral(X) — Running integral of vector X8.sgn(X) — The sign or signum of a real number. It is -1 for a negative number,0 for the number zero, and 1 for a positive number.Extended Language Support and File Management in the MCU ModuleThe MCU Module, formerly MultiMCU, supports C-code in addition to Assemblylanguage. It has a code manager that lets you use multiple files to define theoperation of the microcontrollers in the design. You can have header files and uselibraries. You can also load in externally assembled binary files and view them indisassembled format.Improvements to Speed and Quality of NI UltiboardNI Ultiboard 10.0 contains enhancements to the quality of the product that includeimprovements to the speed of trace-placment and the ability to select whether ornot to plate through-holes. Exported Gerber files do not contain mosaics in thepolygons. Quality improvements in the landpatterns include: pin mappings fromsymbols to IC pin-outs and landpattern shapes and sizes in the database. All newlandpatterns follow IPC standards.Advanced Options for Exported Data InterpolationWhen exporting simulation data from NI Multisim to other NI data formats suchas LVM or TDM files, you can choose the interpolation technique that best suitsthe signal. You can also control the interpolation method used when sendingsimulation data to NI LabVIEW based instruments running inside of NI Multisim.The interpolation methods include:•Coerce•Linear Interpolation•Spline InterpolationNational Instruments Corporation7NI Circuit Design Suite Release NotesMiscellaneous FeaturesSome of the other features added to the new suite include Unicode charactersupport and NI installation and license management.Unicode CharactersAll products in NI Circuit Design Suite 10.0 support Unicode characters. Thisfeature allows you to use Cyrillic and Asian fonts inside the products.NI Installation and License ManagementAll products in NI Circuit Design Suite adhere to the standard method used toinstall and activate National Instruments software. You can activate the softwareautomatically via the internet, or manually via a web browser, phone call, oremail.Product Tier DetailsThe following lists the schematic capture functionality available in MultisimStudent and Education editions:Functionality Student EducationCustomizable GUI X XScreen-capture utility X XComments on schematic X XCircuit annotations X XModeless part placement and wiring X XFast retrieval parts bins X XAuto and manual wiring X XVirtual wiring by node name X XRubber banding on part move X XFast auto-connect passives X XSubcircuits X X3-dimensional breadboarding X XVirtual NI ELVIS X XEmbedded questions - view and respond X XNI Circuit Design Suite Release Functionality Student EducationForward/Back annotation with Ultiboard X XCross-probing with Ultiboard X XBus-vector connect XSpreadsheet view XDesign constraints for layout XAdvanced search XZoom to selected part XCorporate database XUser defined fields XXSave components to database fromworkspaceMultiple circuits open XEmbedded questions - create and edit XElectrical rules check XGraphically mark no-connect pins XHierarchical designs XMultisheet designs XProject manager XReports - including bill of materials XPin and gate swap XExport to Mentor PADS layout XDevice library Partial CompleteMaximum components in design50UnlimitedNational Instruments Corporation9NI Circuit Design Suite Release NotesThe following lists the simulation functionality available in Multisim Student andEducation editions:Functionality Student EducationInteractive simulation X XFully mixed-mode A/D simulation X XStandard SPICE 3X5/XSPICE X XEnhanced model support X XPSPICE model simulation* X XSpeed/Accuracy tradeoffs X XSimulation advisor X XConvergence assistant X XVirtual, interactive, animated parts X XMouse click support for interactive parts X XRated components X XInsert faults into components X XMeasurement Probes X XComponent Wizard X XNI measurement data file sources X XNI measurement data file export X XX XNI LabVIEW VIs as instruments andsourcesMicrophone & speaker X XCircuit restrictions X XGrapher & Postprocessor X XRF design kit X XCircuit wizards XC-Code modeling XDescription box synced with simulation XLadder diagrams/components XModel makers XNI Circuit Design Suite Release Load and save simulation profiles XVirtual Instruments 2222Analyses1018Co-simulation of MCUs Add On Add On* Does not support all PSpice syntaxThe following lists the layout functionality available in Ultiboard Student andEducation editions:Functionality Student EducationPush and Shove trace placement X XReal-time & from copper ratsnest X XReal-time polygon update with voiding X XForward/Backward annotation X XCross-probing with Multisim X XReal-time DRC X X64 layers and 1 nanometer resolution X XComprehensive Footprint Wizard X XEnhanced 3D visualization with print X XUser annotations X XFull screen mode XGerber, DXF, IPC-D-356A, SVG output XDimensions on PCB and Landpatterns XDimensions in Database Manager XNet bridges X3D visualization inside circuit board XTurn off ratsnest for selected nets XGridless follow-me placement XLoad and save technology files XPolar Grids XNational Instruments Corporation11NI Circuit Design Suite Release NotesCustomizable layer viewing XSplit power-planes XKeep-in/Keep-out areas XPlace components in array XUnplace all components XRuler bar alignments and measurements XAuto-alignment XSave PCB Design as a component XPermanent grouping XPin & gate swapping XMultiple clearances XJump to Error XEquispace trace support XDifferential Impedance Calculator XTransmission Line Calculator XMicrovias XTest point insertion XAutomatic tear-dropping XPin necked trace support XAutomatic jumper insertion XCopy Route & Replica Place functions XIn-place footprint editor XMechanical CAD XExport 3D info in 3D IGES, DXF formats XCopper amount report XTest point report XCustomization of report generation XMultiple open documents XNI Circuit Design Suite Release National Instruments Corporation 13NI Circuit Design Suite Release NotesThe following lists the autorouting functionality available in Ultiboard Student and Education editions:Number of pins supported 3501,000Spreadsheet viewLimitedCompleteFunctionalityStudentEducationFully customizable cost factors X X Progressive Routing X X Interactive autorouting X X Constraint driven routingX X Manual pre-placement: components, vias, tracesX X Auto Block Capacitor recognition X X SMD mirroring X X Trace rubberbandingX X Follows keep-in/keep-out criteria X X Pin number limit3501,000Maximum number of layers24DocumentationNI Circuit Design Suite 10.0 includes a complete documentation set featuringprinted and electronic resources for your reference.The following printed and electronic resource is available:•Getting Started with NI Circuit Design Suite GuideThe following electronic resources are available in PDF files:•Multisim User Guide•Multisim Component Reference Guide•Multisim for Educators Guide•Multisim MCU Module User Guide•Ultiboard User GuideTo access the User Guides, select Start > All Programs > National Instruments >Circuit Design Suite 10.0 > Documentation and then select the file of interest.The following online help files are available from the installed software Helpmenu and from the Start Menu:•Multisim Education Edition Help File•Ultiboard Help FileTo access the Help Files, select Start > All Programs > National Instruments >Circuit Design Suite 10.0 > Documentation and then select the file of interest.The following online help files are available from the installed software Helpmenu:•Component Reference Education Edition Help File•Multisim Symbol Editor Help File•Multisim Title Block Editor Help FileNI Circuit Design Suite Release National Instruments, NI, , and LabVIEW are trademarks of National Instruments Corporation.Refer to the Terms of Use section on /legal for more information about National Instrumentstrademarks. Ultiboard is a registered trademark and Multisim and Electronics Workbench aretrademarks of Electronics Workbench. Other product and company names mentioned herein aretrademarks or trade names of their respective companies.374480A-01 Jan07© 2007 National Instruments Corp. All rights reserved.。
Concave and Quasiconcave Functions
f (λx + (1 − λ)y ) ≥ (≤) λ f (x ) + (1 − λ) f (y ). Proof First, suppose that f is concave, i.e., hy p f is convex. Let x and y be two arbitrary points in X . Then, (x , f (x )) ∈ hy p f and (y , f (y )) ∈ hy p f . Since hy p f is convex, we have, for any λ ∈ [0, 1], (λx + (1 − λ)y , λ f (x ) + (1 − λ) f (y )) ∈ hy p f . By definition of hy p f , a point (w , z ) is in hy p f only if f (w ) ≥ z , and hence f (λx + (1 − λ)y ) ≥ λ f (x ) + (1 − λ) f (y ). Now suppose that for all x , y ∈ X and for all λ ∈ [0, 1], it is the case that f (λx + (1 − λ)y ) ≥ λ f (x ) + (1 − λ) f (y ). 1 (1)
Intuitively, the hypograph of a function is the area lying below the graph of the function, while the epigraph is the area lying above the graph. Definition 2 (Concave and convex functions) A function f : X −→ (e p i f ) is convex. is concave (convex) on X if hy p f
微软软件开发人员级别评定标准(英文)

微软软件开发人员级别评定标准(英文)微软软件开发人员级别评定标准(英文)SDE Level Summaries In counseling developers on career progression, I’ve found that the CSP descriptions,though rich in detail, are sometimes too complex for developers to internalize the oneor two things they should focus on. Here, I try to summarize my take on developercareer progression at Microsoft.-Philip SuMain ReferencesThe following are key references which are the definitive sources describing devprogression. My opinions do not supplant these documents.Career Stage Profiles (CSPs) for developers. This describes all the SDEcareer stages.A summary of career stage progression for developers. This is the officialdoc that attempts to summarize progression.Engineering Competencies. People often forget that career progressionis about demonstrating the skills of a career stage and also about havingthe necessary competencies. The competencies are just as important.OverviewsCareer stages are meant to describe someone who is consistently performing at acertain scope. It takes time for a person to consistentlydemonstrate a skill, sopromotions happen after a person has shown repeated success in the required areas.Overviews of the stages are given below, followed by concrete examples of each stage.“He” is used throughout as a gender-neutral designation.SDEAn SDE is learning to consistently contribute as an experienced Microsoft developer. Heshows ownership of individual features. Though he needs closer direction earlier in thisstage, he functions independently later in the stage.SDE IIThis is the first stage at which a developer consistently and independently demonstratesstrong competencies across the key developer responsibilities: designing, scheduling,implementing, debugging, and shipping. An SDE II owns complex components orfeature areas end-to-end.Senior SDEA Senior SDE is a leader within his feature team, regardless of whether he managesothers. He independently introduces and drives initiatives that improve the featureteam. He exemplifies the best of core developer skills when designing, scheduling,implementing, debugging, and shipping. His scope spans the entire feature team.Principal SDEA Principal SDE is a leader across a product team, regardless of whether he managesothers. He independently introduces and drives initiatives that improve both theproduct team and other functions (PM/Test). His decisions reflect an understanding ofthe division’s strategy and a vision that spans multiple versions of the product. Heparticipates in defining the team’s strategy versus competition.Concrete ExamplesBelow are given some concrete examples of what each level should be doing at anAchieved rating. Skills should be demonstrated consistently and repeatedly, and sorecognition via a promotion usually trails the initial development of the necessary skillsby a good bit. Promotions require not only that the skills be present, but that therehave been enough opportunities for those skills to be consistently demonstrated. Inthat sense, p romotions aren’t meant to reflect talent or potential; instead, they reflectwhat’s been demonstrated repeatedly.Averages for time in level are listed below. They are taken from SteveSi’s combined org(Windows Live & Search) from 2006.L59-62: 21 months in each levelL63-65: 31 months in each levelNote that promotions are never based on the amount of time that someone has been ina level. Promotions are assessed purely based on repeatedly demonstrated skills andcompetencies. The progression into increasingly more senior levels usually takes longerwith each level.Level designations are only valid for the US. International locations may have a differentmapping from level to CSP.L59Summary: Learning to develop at Microsoft.Scope: Portions of individual featuresIndependence: Requires close guidance, multiple times a weekCore developer skillsoDesign: Learning how to design features well.oScheduling: Plans and delivers ~1-2 weeks’ work on time in high quality.ooCoding: Learning to produce Microsoft-quality code. Code reviews feature feedback about syntax, naming, clarity,structuring, and factoring.oDebugging: Able to debug his own features.oShipping: Fixes assigned bugs.?Common blockers to the next level: Very rare unless SDE is not the rightfit.CSP: At Achieved, is doing a majority of SDE’s “Full” expectationsL60Summary: Feature contributor, gaining depth in core skills.Scope: Individual featuresIndependence: Requires regular guidance, up to multiple times a week?Core deve loper skillsoDesign: Designs isolated features well.oScheduling: Plans and delivers ~2-4 weeks’ work on time in high quality.oCoding: Regularly produces Microsoft-quality code. Code reviews may occasionally feature feedback on clarity, structuring, and factoring.oDebugging: Able to debug most features in his feature area.oShipping: Fixes assigned bugs and gives input to triage.?Common blockers to the next level: Not adapting to feedback on core dev skills, not effectively learning from past mistakes quickly.CSP: At Achieved, is doing almost all of SDE’s “Full” expectationsL61Summary: Consistent, experienced, independent Microsoft contributor?Scope: Owner of a feature areaIndependence: Makes most feature decisions independently, but may need guidance on prioritization.Core developer skillsoDesign: Designs feature areas and components well.oScheduling: Plans and delivers 4+ weeks’ work independentlywith no necessary adjustments to the schedule.oCoding: Consistently produces Microsoft-quality code. Codereviews should rarely feature feedback on structuring andfactoring, and never on naming, syntax, and clarity.oDebugging: Able to debug entire feature area. Appliesadvanceddebugging tools when appropriate.oShipping: Gives significant input to triage, may participate in key ship decisions.Common blockers to the next level: Not advancing one’s expertise through learning new tools, researching established or emergingengineering practices, and continually improv ing one’s productivi ty. Notinvesting deeply enough in understanding a technology area. Not owningresponsibilities end-to-end.CSP: At Achieved, is doing a majority of SDE II’s “Full” expectationsL62Summary: Expert developer, notably higher productivity than morejunior developers.Scope: Owner of a feature area, considered an expert developer andacentral part of the feature team.Independence: Makes component decisions independently. Suggestseffective improvements to the feature team.Core developer skillsoDesign: Expertly designs components using appropriate patterns.oScheduling: Plans and delivers ~8 weeks’ work independentlywith no necessary adjustments to the schedule. Experienced andeffective in checking others’ schedules.oCoding: Consistently produces Microsoft-quality code. Is notably more productive than more junior developers because he knowsand applies the right tools and strategies, anticipates and avoids roadblocks, and keeps quality consistently high throughoutdevelopment.oDebugging: Expertly debugs entire component, able to effectively debug other components. Bug fixing throughput is notably higher than more junior developers. Discovers and evangelizes betterdebugging tools.oShipping: Makes solid triage recommendations that balancecustomer need, business need, and component risk. Participatesin key ship decisions.Common blockers to the next level: Many developers do not get past this level because they don’t transition from “doing” to “leading.”Blockers may include lack of independent initiative, lack of business- andcustomer-grounded perspective, and lack of interpersonal leadership skills.CSP: At Achieved, is doing almost all of SDE II’s “Full” expectationsL63Summary: Feature area leader, exemplary developerScop e: Owner of a complex component or multiple feature areas.Impacts the work of multiple developers regardless of whether he manages them.Independence: Makes component decisions independently and guides others to as well. Initiates and drives improvements to the feature team.Independently establishes effective relationships with other teams.Core developer skillsoDesign: Expertly designs complex components and overseesothers’ designs.oScheduling: Plans and delivers the work of multiple developers on time and in high quality.ooCoding: Produces exemplary code that consistently sets the bar for expert developers. Coaches others to produce high qualitycode.oDebugging: Not significantly different from L62oShipping: Key decision maker in component and feature areatriage.Common blockers to the next level: Not moving from in-disciplineleadership to leading all team members regardless of discipline. Not consistently influencing others beyond the feature team. Notestablishing and driving relationships with other teams/divisionsthatresult in clear business impact.CSP: At Achieved, is doing a majority of Senior SDE’s “Full” expectationsL64Summary: Team-wide leaderScope: Owns complex components or a small product. Impacts the work of multiple developers regardless of whether he manages them, andaccountable for the effective functioning of the entire feature team.Recognized as a strong contributor by other teams in the division.Independence: Makes feature team decisions independe ntly. Coaches and guides the other functions. Initiates and drives improvements to theproduct team. Independently establishes effective relationships with other teams.Core developer skills: Above L63, expectations of the coredeveloperskills don’t change much. Continued growth is dependent primarilyonscope growth and leadership ability.oDesign: Not significantly different from L63. Expected toregularly oversee the design of others.oScheduling: Not significantly different from L63.oCoding: Not significantly different from L63.oDebugging: Not significantly different from L63.oShipping: Key decision maker in product triage. Coaches othersin making ship decisions.Common blockers to the next level: Not becoming a clear leader acrossthe division that consistently delivers significant business valueby drivingand influencing the work of many employees. Lacking a key soft skill orability to work collaboratively with others. Not consistently initiating anddriving improvements to the entire product team. Not contributin g regularly to the product team’s business and technology strategy.CSP: At Achieved, is doing almost all of Senior SDE’s “Full” expectationsL65Summary: T eam-wide leader with regular division-wide impactScope: Owns a large subsystem or a major product. Impacts the work ofthe entire engineering team regardless of whether he manages people, and accountable for the effective functioning of the entire team.Recognized as a leader by other teams in the division.Inde pendence: Makes product team decisions independently. Coaches and guides other functions. Initiates anddrives improvements to the product team. Independently establishes effective relationships with other teams or divisions.Core developer skills: Exp ectations of the core developer skills don’tchange much from L64. Continued growth is dependent primarily on scope growth and leadership ability.CSP: At Achieved, is doing a majority of Principal SDE’s “Full”expectations。
SANWA SGS-02说明书
Thank you for purchasing SANWA SGS-02.This operation manual is to explain how to use SGS-02 for safety uses. Please read carefully and keep the operation manual after reading.■The SGS-02 is designed specifically for use with SANWA transmitter.■The products is not waterproof. Please do not use in raining as excessive moisture. ■After driving RC car, please keep it to take off the battery.SGS-02 is for the automatically motion control for opposite lock (counter-steering). It use any categories as F1 and Drift and adjust setting values for various categories.Main Features High quality competition grade gyro system New system “QUICK” function can make ideal motion Compatible with SXR (SANWA Extreme Response) mode (will be the best smooth motion) The setting can be set by SANWA transmitter (AUX-ADJ, CODE10) Aluminum case is installed and compact gyroTo change each setting values is in the below methods.●Change SGS-02 Setting Methods1. Changing setting values by PROGRAM MODE2. Changing setting values by MULTI-SETTING GEAR●Change SGS-02 Setting Methods by the SANWA transmitter (Wireless settng from transmitter)3. Changing setting values by AUX 4. Changing setting values by CODE102. and 4. methods are needed to prepare devices.2. method needs MULTI-SETTING GEAR. 4. method needs receivers and transmitter are compatible with CODE10 (CODE5 is not compatible).*In case of using MULTI-SETTING GEAR, please update firmware for SGS-02. Please check SANWA HP for firmware (Firmware ver is same as PGS-HR).*Please also check devices are compatible with CODE10 and SSL function on SANWA HP.●Caution before tuning on the carPlease turn on the transmitter first. With the car sitting on a stable flat surface, and turn on the receiver. Please do not turn right or left steering on the transmitter when turning on the receiver. *It will cause on inappropriate neutral position.●In case of using SANWA PGS servo series, hunting will be happened by PGS setting. Please check PGS setting recommendation in last page of the manual.SGS-02 can be set each function values in the below.Function is for reducing servo hunting.In case of nonprogrammable servos, hunting might be happened. Hunting will be less by increasing the value.●AVE-FL(Average Filter)Function is for gyro movement reverse.In case of gyro movement is opposite in default setting, it will be set reverse.●REVERSEFunction can be gyro out put will be SXR (SANWA Extreme Response) mode. Even if device is incompatible with SXR mode, gyro out put will be SXR mode. (*The function is required to use servo is compatible with SXR mode.)●SXR-OUTFunction is setting content change by AUX.SGS-02 can change AUX setting content by AUX-ADJ function.AUX-ADJ function can choose one content from GAIN, QUICK, SPD-FW/SPD-RT, GY-LIM, and AVE-FL.●AUX-ADJ( AUX Adjust)Function is for changing gain rate.In case of changing gain rate, SGS-02 will fit to any categories as F1 and Drift.Basically, F1 set 0.5 and Drift set 1.●GAIN-LV(Gain Level)Function for limited the gyro movement.Mainly, the function will be used for F1. In case gyro worked too much, the gyro movement will be limited by increasing value.●GY-LIM(Gyro Limiter)Function is for reduce gyro movement speed.F(Gyro movement speed when initial cornering), R(Gyro movement when servo will be back to the neutral position)In case of reducing gyro movement speed, the car will be smooth and the car movement will be as real car.●SPD-FW/SPD-RT(Speed-Forward/Return)Function is for setting gain.In case of increasing gain setting, the car will be stable.●GAINFunction is for quick car movement.In case car will be difficult to turn due to high gain, car will be easy to turn by increasing QUICK values.●QUICK670A02599A* Steering will work opposite side by moving car*Tire directionPlease set the below contents before install the SGS-02 to car.1. Car steering is same way with transmitter steering. (If steering is opposite way please set by REV on the transmitter)2. Please set neutral steering setting. (If neutral is not correct, please set by SUB TRIM on the transmitter)Please check transmitter manual when setting the above contents.1. SGS-02 ConnectionPlease connect servo to the and connect to receiver CH1* Please do not use at initial setting. AUX / SSL input connector Steering Data input connector Steering Data output connector2. How to Install SGS-02Please install the SGS-02 as right figure by double side tape. *SGS-02 cannot correctly work with wrong installation.3. Initial Setting (Limit Mode) 1. Turn on the transmitter 2. Press with holding SGS-02 SW and turn on car power. (LED Status: Red Lighting / Blue and Green is flashing) 3. Turn right on transmitter steering until end. Then, press SW. (LED Status: Green flashing change to Green lighting after press SW)4. Turn left on transmitter steering until end. Then, press SW. (LED Status: Blue flashing change to Blue lightning after press SW)5. Finish default setting (LED Status: Green, Red, and Blue lightning. After 2 seconds, the lights will be blinking. Then, Blue lightning.) *In case of setting REVERSE, green and blue light will work opposite.4. Gyro Operation Direction Checking Please move car as the right figure. In case steering will work opposite side, the initial setting is finished. Please turn off the car.setting by PROGRAM MODE or MULTI SETTING GEAR.Please check how to change the setting in PROGRAM MODE contents.OKChassis Surface Operation Manual*Car moving direction① Setting by PROGRAM MODE● In case of setting by program mode1. Please connect gyro as the below picture. LED light will be turned on blue after turning on the transmitter and car.2. Press SW with holding for 2 second. LED will be flashing green and blue light and will be in program mode.3. In the program mode, press SW to move setting contents: ①→②→③4. Please press SW with holding for 2 seconds on the setting contents. Mode will be in setup mode and can set select setting content.5. In setup mode, red and green light will be flashing. Press SW to set values: #1→#2→#3.6. Press SW with holding for 2 seconds and setting value will be changed.7. When finished setting value, mode will be returned on program mode.8. Press SW to change setting content after ⑩, the program mode will be finished and save setting value to SGS-02.●SGS-02 is different to set up by using device function. In case of setting GAIN, QUICK, SPD-FW, SPD-RT, GY-LIM, and AVE-FIL, Please refer in the below. *Please also check devices are compatible with CODE10 and SSL function on SANWA HP. ●In Program Mode IndicationBlue Light flashing Times: Setting contents Green Light Flashing Times: Setting valuesSW *In case of connecting AUX/SSL input connector to receiver SSL port, Program Mode can be set only ①~④*In case of not connecting SXR compatible servo, please DO NOT turn on SXR-OUT function.*In case of turning on the SXR-OUT function, please restart the car. The setting will not apply until restart.Program Mode Contents List(Example)REVERSE Setting Change③Setting by AUX Function●In case of setting by AUX function(*required more than 3ch transmitter and receiver), setting will be available by transmitter.Connect AUX/SSL port to receiver CH3 or CH4.When turning on the car, SGS-02 light will be turned on blue and red. Default setting is GAIN setting.Connecting to receiver CH3 can be set by AUX1. Connecting to receiver CH4 can be set by AUX2. AUX setting depends on transmitters. Please check transmitter’s manual. ■To change AUX-ADJ setting by PROGRAM MODE or MULTI-SETTING GEAR, AUX can change to set for QUICK, SPD-FW, SPD-RT, GY-LIM, or AVE-FL.*AUX response mode is only available with NOR or SHR.④Setting by CODE10●In case of setting by CODE10(*required transmitter and receiver are compatible with CODE10), Setting will be available by transmitter CODE10 function. 1. Connect SGS-02 AUX/SSL input connector to receiver SSL port. 2. Transmitter AUX2 set CODE10. 3. Check SGS-02 Light is turned on green and blue. 4. Set each setting value by AUX2 CODE 1 - 6.■How to save setting by CODE10Setting data by CODE10 can be saved in SGS-02.After setting value by CODE10, enter in program mode. Then finished program mode will be saved CODE10 setting in the SGS-02. In case of using saved data, please take off SSL/AUX connector from receiver SSL port, then restart car. Please check green light will be off when restarted.*CODE5 is not compatible with SGS-02*SXR response mode is not available to use CODE10.*SSL-CH set “5” as default setting. Basically, the SSL-CH is not needed to change. Please keep SSL-CH setting is “5”.②Setting by MULTI-SETTING GEAR●In case of setting by MULTI-SETTING GEAR(Optional),setting will be available to connect setting data input connector to MULTI-SETTING GEAR.(Default●Setting availability is different to use Program Mode,MULTI-SETTING GEAR, AUX, and CODE10. ②Setting by Multi-Setting Gear ③Setting by AUX function ■Available to set contents by AUX-ADJ ④Setting by CODE10*1 GAIN/QUICK/SPD-FW/SPD-RT/GY-LIM/AVE-FL●Please check light for current SGS-02 condition.*Setting REVERSE on transmitter will beswitched green and blue light in LIMIT MODE.〇→On△→Flashing☆→Blinking-→OffSettingSteps●Servo does not work.In case of flashing blue and green light, SGS-02 works in PROGRAM MODE and servo will not work.Please finish Program Mode or restart car.In case of using servo is incompatible with SXR responses mode and turn on SXR-OUT setting, Servo does not work.Please turn off SXR-OUT function by Program Mode or MULTI-SETTING GEAR.●Servo cannot point neutral position.In case of setting gyro limit and QUICK setting value is above 1, neutral disposition might be happened.Please set QUICK value is “0” when setting gyro limit.●Gyro does not work.SGS-02 GYRO-GAIN might set “0”. Please check GYRO-GAIN setting by Program Mode or MULTI-SETTING GEAR.Also, please check CODE1 setting is not “0” in case of using CODE10 by transmitter.●Servo huntingIn case Boost and Stretcher values in Programmable servo (PGS servos) set high values, hunting will be happened.Please use the servo to decrease Boost and Stretcher values.In another case is gyro works by car vibration.SGS-02 is structured to avoid effect by car vibration. If the SGS-02 worked by the vibration, please usethick double side tape or place the SGS-02 apart from car motor.●Please refer SGS-02 Setting in the below.●Please refer in the below PGS servo setting for drift.*Please start to try default setting except the above setting.LED(Default)Limit ModeMODEOperationModeProgramModeBlue Red Green☆☆☆☆☆☆△△〇〇〇〇〇〇〇〇------〇〇〇〇〇〇△△△△CONDITIONNo signal from transmitterStart Limit ModeComplete a side steering settingComplete an another side steering settingFinish Limit Mode SettingOperate by internal settingOperate by internal setting + AUXOperate by CODE10Program ModeSet Up ModeFinish Set Up Mode△PGS-LH/LH2PGS-CL/CL2STRECTContentsMV-FRQMV-HLD5 - 1010010 - 20100PGS Servo Recommendation for DriftBRAKE50 (Default)30 - 40。
ROHM Solution Simulator 用户指南.pdf_1705892277.949866
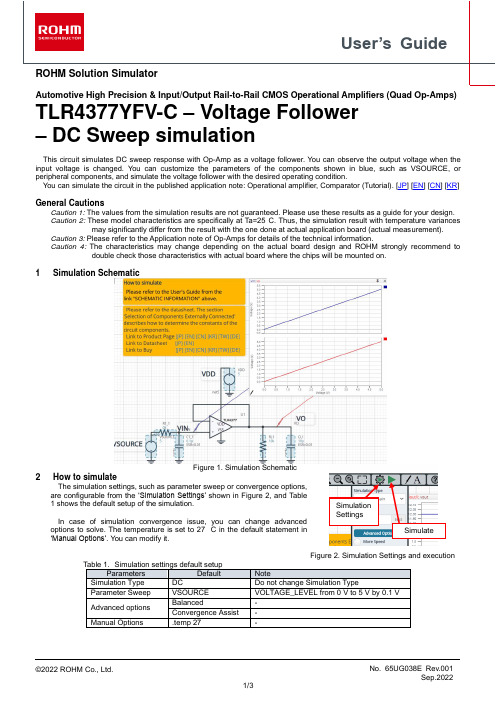
User’s Guide ROHM Solution SimulatorAutomotive High Precision & Input/Output Rail-to-Rail CMOS Operational Amplifiers (Quad Op-Amps) TLR4377YFV-C – Voltage Follower– DC Sweep simulationThis circuit simulates DC sweep response with Op-Amp as a voltage follower. You can observe the output voltage when the input voltage is changed. You can customize the parameters of the components shown in blue, such as VSOURCE, or peripheral components, and simulate the voltage follower with the desired operating condition.You can simulate the circuit in the published application note: Operational amplifier, Comparator (Tutorial). [JP] [EN] [CN] [KR] General CautionsCaution 1: The values from the simulation results are not guaranteed. Please use these results as a guide for your design.Caution 2: These model characteristics are specifically at Ta=25°C. Thus, the simulation result with temperature variances may significantly differ from the result with the one done at actual application board (actual measurement).Caution 3: Please refer to the Application note of Op-Amps for details of the technical information.Caution 4: The characteristics may change depending on the actual board design and ROHM strongly recommend to double check those characteristics with actual board where the chips will be mounted on.1 Simulation SchematicFigure 1. Simulation Schematic2 How to simulateThe simulation settings, such as parameter sweep or convergence options,are configurable from the ‘Simulation Settings’ shown in Figure 2, and Table1 shows the default setup of the simulation.In case of simulation convergence issue, you can change advancedoptions to solve. The temperature is set to 27 °C in the default statement in‘Manual Options’. You can modify it.Figure 2. Simulation Settings and execution Table 1.Simulation settings default setupParameters Default NoteSimulation Type DC Do not change Simulation TypeParameter Sweep VSOURCE VOLTAGE_LEVEL from 0 V to 5 V by 0.1 VAdvanced options Balanced - Convergence Assist -Manual Options .temp 27 - SimulationSettingsSimulate3 Simulation Conditions4 Op-Amp modelTable 3 shows the model pin function implemented. Note that the Op-Amp model is the behavior model for its input/output characteristics, and no protection circuits or the functions not related to the purpose are not implemented.5 Peripheral Components5.1 Bill of MaterialTable 4 shows the list of components used in the simulation schematic. Each of the capacitors has the parameters of equivalent circuit shown below. The default values of equivalent components are set to zero except for the ESR ofC. You can modify the values of each component.Table 4. List of capacitors used in the simulation circuitType Instance Name Default Value Variable RangeUnits Min MaxResistor R1_1 0 0 10 kΩRL1 10k 1k 1M, NC ΩCapacitor C1_1 0.1 0.1 22 pF CL1 10 free, NC pF5.2 Capacitor Equivalent Circuits(a) Property editor (b) Equivalent circuitFigure 3. Capacitor property editor and equivalent circuitThe default value of ESR is 0.01 Ω.(Note 2) These parameters can take any positive value or zero in simulation but it does not guarantee the operation of the IC in any condition. Refer to the datasheet to determine adequate value of parameters.6 Recommended Products6.1 Op-AmpTLR4377YFV-C : Automotive High Precision & Input/Output Rail-to-Rail CMOS Operational Amplifier (QuadOp-Amp). [JP] [EN] [CN] [KR] [TW] [DE]TLR2377YFVM-C : Automotive High Precision & Input/Output Rail-to-Rail CMOS Operational Amplifier (DualOp-Amp). [JP] [EN] [CN] [KR] [TW] [DE]TLR377YG-C : Automotive High Precision & Input/Output Rail-to-Rail CMOS Operational Amplifier. [JP] [EN] [CN] [KR] [TW] [DE]LMR1802G-LB : Low Noise, Low Input Offset Voltage CMOS Operational Amplifier. [JP] [EN] [CN] [KR] [TW] [DE] Technical Articles and Tools can be found in the Design Resources on the product web page.NoticeROHM Customer Support System/contact/Thank you for your accessing to ROHM product informations.More detail product informations and catalogs are available, please contact us.N o t e sThe information contained herein is subject to change without notice.Before you use our Products, please contact our sales representative and verify the latest specifica-tions :Although ROHM is continuously working to improve product reliability and quality, semicon-ductors can break down and malfunction due to various factors.Therefore, in order to prevent personal injury or fire arising from failure, please take safety measures such as complying with the derating characteristics, implementing redundant and fire prevention designs, and utilizing backups and fail-safe procedures. ROHM shall have no responsibility for any damages arising out of the use of our Poducts beyond the rating specified by ROHM.Examples of application circuits, circuit constants and any other information contained herein areprovided only to illustrate the standard usage and operations of the Products. The peripheral conditions must be taken into account when designing circuits for mass production.The technical information specified herein is intended only to show the typical functions of andexamples of application circuits for the Products. ROHM does not grant you, explicitly or implicitly, any license to use or exercise intellectual property or other rights held by ROHM or any other parties. ROHM shall have no responsibility whatsoever for any dispute arising out of the use of such technical information.The Products specified in this document are not designed to be radiation tolerant.For use of our Products in applications requiring a high degree of reliability (as exemplifiedbelow), please contact and consult with a ROHM representative : transportation equipment (i.e. cars, ships, trains), primary communication equipment, traffic lights, fire/crime prevention, safety equipment, medical systems, servers, solar cells, and power transmission systems.Do not use our Products in applications requiring extremely high reliability, such as aerospaceequipment, nuclear power control systems, and submarine repeaters.ROHM shall have no responsibility for any damages or injury arising from non-compliance withthe recommended usage conditions and specifications contained herein.ROHM has used reasonable care to ensur e the accuracy of the information contained in thisdocument. However, ROHM does not warrants that such information is error-free, and ROHM shall have no responsibility for any damages arising from any inaccuracy or misprint of such information.Please use the Products in accordance with any applicable environmental laws and regulations,such as the RoHS Directive. For more details, including RoHS compatibility, please contact a ROHM sales office. ROHM shall have no responsibility for any damages or losses resulting non-compliance with any applicable laws or regulations.W hen providing our Products and technologies contained in this document to other countries,you must abide by the procedures and provisions stipulated in all applicable export laws and regulations, including without limitation the US Export Administration Regulations and the Foreign Exchange and Foreign Trade Act.This document, in part or in whole, may not be reprinted or reproduced without prior consent ofROHM.1) 2)3)4)5)6)7)8)9)10)11)12)13)。
matlab的evaluatefeatures函数 -回复
matlab的evaluatefeatures函数-回复关于matlab的evaluatefeatures函数,我们将逐步回答以下问题:1. 什么是evaluatefeatures函数?2. 如何使用evaluatefeatures函数?3. evaluatefeatures函数中的参数有哪些?4. evaluatefeatures函数的输出是什么?5. 如何解释evaluatefeatures函数输出的结果?6. evaluatefeatures函数的优缺点是什么?7. 有什么实际应用场景可以使用evaluatefeatures函数?8. 如何优化evaluatefeatures函数的性能?9. 其他替代evaluatefeatures函数的方法是什么?10. 总结。
1. 什么是evaluatefeatures函数?evaluatefeatures函数是MATLAB中用于评估图像特征的函数。
该函数基于图像输入和特征提取算子,计算并返回一组特定特征的结果。
这些特征可以用于图像分类、识别和检测等任务。
2. 如何使用evaluatefeatures函数?要使用evaluatefeatures函数,首先需要加载图像数据,并选择合适的特征提取算子。
接下来,将图像数据和特征提取算子作为参数传递给evaluatefeatures函数。
函数将返回一个包含特征结果的矩阵。
下面是使用evaluatefeatures函数的示例代码:matlab加载图像数据img = imread('image.jpg');选择特征提取算子(例如,SURF)featureExtractor = vision.SURFPoints;提取特征features = evaluatefeatures(img, featureExtractor);3. evaluatefeatures函数中的参数有哪些?evaluatefeatures函数的主要参数是图像数据和特征提取算子。
COSMOSMotion中文教程

Planar平面副
方向
轴2
连接点
轴1
原点
约束1个旋转,3个移动自由度
约束2个旋转, 1个移动自由度
Slide 15
常用的运动副类型
Fixed固定副 Screw螺旋副
移动和旋转轴
螺距
原点
约束3个旋转,3个移动自由度
约束1个自由度
2个构件可以不平行于移动和旋转轴,但2个构件的Z轴 应该平行且方向一致。
e 5
机构运动分析用户界面一览
Motion 力
Slide 6
机构运动分析用户界面一览
Slide 7
机构运动分析下拉菜单
Slide 8
选项对话框 - World
设置力和时间的单位
指定重力加速度,或者点击地 球图标重新设置重力加速度
在整体坐标系中快速指定重力 的方向
Slide 9
选项对话框 – 显示
Slide 2
机构运动分析 用户界面
下拉菜单 Motion 工具条
Motion 浏览器
Slide 3
机构运动分析用户界面一览
Motion 零件
指定可动的和固定的零件,并从零件中 定义主运动物体。
不考虑质量属性,定义零件初始的状态。
Slide 4
机构运动分析用户界面一览
Motion Joints
COSMOS/Motion 机构运动分析用户培训
目
COSMOS/Motion 用户界面............................................... 3 COSMOS/Motion 下拉菜单............................................... 8 选项对话框......................................................................... 9 基本连接类型 ................................................................... 13 Constraint Mapping ....................................................... 14 IntelliMotion Builder - Four bar Exercise .......................... 17 IntelliMotion Browser - Four bar Exercise ........................ 25 Joint Definition............................................................... 30 Piston Model for manual joint definition Exercise ............ 34 Joint Definition – Motion............................................... 42 Plotting Results in SolidWorks..................................... 47 Scissors Lift Exercise....................................................... 49 Linear Springs................................................................ 54 Linear Dampers.............................................................. 55 Torsional Springs .......................................................... 56 Torsional Dampers ........................................................ 57 Door Exercise .................................................................. 58 Governor Exercise ........................................................... 66 Applied Force................................................................. 71 Applied Moment............................................................. 72 Action/Reaction Force................................................... 73 Action/Reaction Moment............................................... 74 Impact Force .................................................................. 75 Electromechanical Switch Exercise ................................. 79 Punch Exercise................................................................ 86
Class_3研究生论文写作___functions_and_moves

•
Terms
–
what
do
these
Smo Iewaannt?to
How it tell you
started about my
research.
I
– genre – function
got interested in this topic because of my experiences as a teacher. Then in my first year of my MA program I chatted with my
– If useful, read ppt on How to improve your reading
Continue the analysis
• For each sentence: 6-9, 13, 15, 16
– find the move(s) – find the words or phrases indicating the move
New Abstract – Paragraph 1
– the sub-moves “are not a prescriptive list that you must use” (p.4)
– willingness to communicate (WTC)
Imitation in writing
• Have you used “frames” for writing an essay?
Swales and Feak: Introduction to
purposes and organization
• P. 8-10 shows how a writer thinks
• In groups, discuss your answers to tasks 3, 4, and 5 (7-8 min)
谈自制力

谈自制力篇一:李阳——自制力“只要能够自我约束就尽情释放自己!”~麦克贾格尔It'sallrightlettingyourselfgo,aslongasyoucangetyourselfback.mickJagger新近研究表明利用抽象推理有助于自制力提升。
newresearchsuggestsself-control canbeimprovedusingabstractreasoning.诱惑万千,强烈、本能得让人无法抵抗。
暴饮暴食,奢侈挥霍,恣意妄为。
在脑海深处回荡的瞬间信息试图指引着我们的行为。
TempTATIoncomesInmanyforms,oftensopotent,soanimal,thatitseemsimpo ssibletoresist.eatingtoomuch,drinkingtoomuch,spendingtoomuchorlettingtheheartrulethehead. wegetinstantmessagesfromdeepinthegutthatresonatethroughthemind,tryin gtodictateourbehaviour.能够运用更高层次的认知功能——诱惑是人类最为有用的技能之一,没有这种能力进步文明便不会存在。
心理学家发现自制力与成功紧密相关,成功的因素包括高度的自尊、出色的人际沟通能力,恰当的情绪反应,以及也许让人惊讶的鲜有缺陷的高层自制力(Tangneyetal.,20XX)。
oneofhumanity'smostusefulskills,withoutwhichadvancedcivilisationswoul dnotexist,isbeingabletoengageourhighercognitivefunctions,ourself-control ,toresistthesetemptations.psychologistshavefoundthatself-controlisstrongl yassociatedwithwhatwelabelsuccess:higherself-esteem,betterinterpersonal skills,betteremotionalresponsesand,perhapssurprisingly,fewdrawbacksate venveryhighlevelsofself-control.人们,仅仅是人类,常常要与其强烈的基本需求和自制做着持续斗争。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Exercise 3
•
The sum of geometric series is given by:
•
1+r+r2+r3+r4+…+rn
•
write a function called “geomser" that will receive a value for r and calculate and return the sum of the geometric series. If a second argument is passed to the function, it is the value of n; otherwise, the function generates a random integer for n ( in the range from 5 to 30). Write you code in the most efficient way.
•
Example
function area = areafori(varargin) % areafori returns the area of a circle in feet % a=areafori(radius); calculates the area in foot square % a=areafori(radius,'i'); calculates the area in inch square n=nargin; radius=varargin{1}; if n==2 unit=varargin{2}; if unit == 'i' radius = radius *12; %convert radius from feet to inches else fprintf('input is not identified\n'); end end area = pi*radius.^2;
Anonymous Functions
•
Similar to Macros anonymous functions are used to create a quick access to a lengthy statement without having to create a “.m” file for a proper function definition. Syntax:
•
• •
Function of Function Using Handlers
•
Syntax:
function [outputvars]= function_name(var1,var2,…,funHandler)
•
Syntax Example:
•
Calling Example:
function sumx= plotfun(x,funh) y=funh(x); plot(x,y); sumx=sum(x(:));
Advanced Functions
Dr. Utayba Mohammad University of Detroit Mercy This Material is adopted from: “Matlab: a practical introduction to programming and problem solving”, Stormy Attaway, 2013
•
•
Variable Output Arguments
•
Similar to variable input argument it uses to builtin variables:
• •
cell array varargout scalar nargout returns the number of variables in the output list at call time.
•
load File_name.mat e.g.: >>load ano
•
In order to make code more general and adaptable to different inputs “handles” are used by Matlab. Function handles are “function pointers”
function_handler_variable = @ (arguments) function_body;
•
•
•
function_handler_variable: the name of the function
Anonymous Functions Example
•
Create the anonymous function: >> cirarea = @ (radius) pi*radius.^2;
•
call the anonymous function: >> area = cirarea(6)
•
Get the anonymous function description: >> cirarea
Exercise I
•
create anonymous function “cylVol” that calculates the volume of a cylinder.
>>x=0:0.001:2*pi; >>s=plotfun(x,@sin);
Exercise 2
•
for the plotting function in the previous example, we’d like to plot the relation between circuit radius and area. use the anonymous function “cirarea” as an input to “plotfun”.
•
•
E.g. given a data set, you want to plot the data and its corresponding fitted model to compare the two. you can pass in the fitting function handler as an input to your plotting function. Syntax: >> handler_var = @function_name; e.g: >> fh = @sin;
Variable Number of Input Arguments
•
input variables information can be passed in to a function through
•
cell array called varargin (variable argument input) scalar nargin (number of input argument)
• • • • •
y=calcStat(x); %returns x sorted in ascending order and stores it in y. [y,max]=calcStat(x); [y,max,min]=calcStat(x); [y,max,min,median]=calcStat(x); y=calcStat(x,’descend’);%returns x sorted in descending order and stores it in y. This should work with all output formats as described above y=calcStat(x,’descend’,’First’,k);%returns the first K sorted elements of x in y y=calcStat(x,’First’,k);%returns the first K sorted elements of x in y y=calcStat(x,’descend’,’last’,k);%returns the last K sorted elements of x in y
Saving and importing Anonymous Functions
•
you can save anonymous functions in “.mat” file using:
• •
save File_name.mat anonymous_function_name e.g.: >>save anonfns cirarea
•
Variable Input/output Argument Functions
•
From Matlab help:
>>help find find Find indices of nonzero elements. I = find(X) returns the linear indices corresponding to the nonzero entries of the array X. X may be a logical expression. Use IND2SUB(SIZE(X),I) to calculate multiple subscripts from the linear indices I. I = find(X,K) returns at most the first K indices corresponding to the nonzero entries of the array X. K must be a positive integer, but can be of any numeric type. I = find(X,K,'first') is the same as I = find(X,K). I = find(X,K,'last') returns at most the last K indices corresponding to the nonzero entries of the array X. [I,J] = find(X,...) returns the row and column indices instead of with sparse matrices. ….