基于PC9S12XS128MCU的新型视觉智能车控制系统设计
基于MC9S12XS128单片机的智能小车控制系统设计与实现
基于MC9S12XS128单片机的智能小车控制系统设计与实现鲁小雨【摘要】介绍了一种电子竞赛智能小车的控制系统设计与实现.以MC9S12XS128单片机作为控制系统核心,设计了智能小车的视频处理电路、电机驱动电路以及电源电路等,给出了赛道图像采集算法、抗干扰和抗反光的黑线提取算法、舵机转向和速度调节的PID控制算法、赛道识别和弯道控制算法,制作的智能小车能通过对自身运动速度和方向的实时调整实现沿赛道快速稳定地行驶.%A design and implementation process of a control system for a smart vehicle prepared for undergraduate electronic contests were introduced.Taking aMC9S12XS128 microprocessor as the core,a video processing circuit,a motor driving circuit and a power circuit of the vehicle were designed.Some algorithms for track image collection,anti-interferential and anti-reflective black line extraction,PID control of steering and speed,and track recognition together with turning control weregiven.Finally,through instantaneously adjusting its own speed and direction,the vehicle can run along the route stably at a high speed.【期刊名称】《成都大学学报(自然科学版)》【年(卷),期】2011(030)003【总页数】5页(P264-267,273)【关键词】智能小车;路径识别;PID控制【作者】鲁小雨【作者单位】东南大学自动化学院,江苏南京211102【正文语种】中文【中图分类】TP2730 引言随着汽车电子业的发展,具有自动识别道路功能的智能汽车成为业界研究的重点.本文研究的智能小车的制作设计以CMOS摄像头作为路径识别传感器,以直流电机作为小车的驱动装置,通过舵机来控制小车的转向.本文不仅说明了整个智能小车控制系统的硬件和软件设计与实现,同时讨论了为进一步提高小车的稳定性和行驶速度对小车控制算法的设计要求.设计出的智能小车可以通过实时对自身运动速度和方向的调整来“沿赛道”快速行驶.1 系统总体设计我们设计的智能小车控制系统结构如图1所示.图1 智能车控制系统结构示意图如图1所示,该智能车控制系统以MC9S12XS128单片机作为控制系统的核心[1],通过黑白CMOS摄像头拍摄赛道图像并以PAL制式信号输出到信号处理模块(LM1881)进行视频同步信号分离,所得到图像和同步信号同时输入到单片机控制核心,单片机对信号进行判断处理后,通过改变PWM波脉宽实现对舵机转向的控制.舵机转向采用PD控制,通过光电编码器来检测车速并将速度反馈到单片机控制核心,用PID控制算法处理后得到的控制量去改变电机驱动模块的PWM波占空比,从而控制智能车的行驶速度.此外,控制系统还增加了路径识别的模块,对典型赛道进行决策控制,提高了智能小车的运行速度和稳定性.2 硬件电路设计智能小车控制系统硬件电路的总体设计本着可靠、高效、简洁的原则进行.系统的硬件电路包括控制系统核心电路、电源稳压电路、视频同步分离电路、电机驱动电路等.2.1 控制系统核心电路设计中,我们选取MC9S12XS128单片机作为控制系统核心.该单片机的CPU外部总线频率为8 MHz,内部运算速度可达25 MHz,其内部寄存器组中的寄存器、堆栈指针和变址寄存器均为16位.其为112引脚封装,有2个8路10位精度A/D转换器,脉宽调制模块(PWM)可设置成4路8位或者2路16位.在控制系统核心电路制作时,需要涉及一些普通的I/O口,单片机引脚规划如下:PS4-7,SPI下载; AN00-15,2个8路10位ADC;ANIN,输入视频模拟信号VIDEO;IRQ,输入视频行同步脉冲信号;PH5,输入奇偶场信号O/E;PWM5,舵机角度信号控制输出;PWM1、PWM3,输出电机控制信号.2.2 电源电路设计硬件电路的电源为7.2 V的镍铬电池,除了舵机需要的电压是7.2 V,可以直接输出以外,CMOS摄像头的工作电压为12 V,需要一个升压的电路,而单片机的标准供电电压、LM1881供电电压、光电编码器的供电电压均为5 V,因此还需要一个降压稳压电路.2.2.1 5 V电源降压稳压电路.5 V电源降压稳压电路如图2所示.图2 5 V电源降压稳压电路由于后轮驱动电机工作时电池电压压降较大,电路设计中必须采用低压降串联稳压芯片,以保证系统工作的稳定性,本电路选用2940稳压芯片来实现稳压.2.2.2 12 V电源升压电路.12 V电源升压电路如图3所示.图3 12 V升压电路MC34063芯片是一个单片机双极型线性集成电路,专用于直流—直流变换器控制的部分.MC34063芯片内包含了温度补偿带隙基准源、控制振荡器、驱动器和大电流输出开关,能输出1.5A的开关电流,故选取MC34063设计升压电路,可使用最少的外接元件就能够构成开关式升压变压器.2.3 视频处理电路智能小车视频信号中除了包含拍摄到的图像信号之外,还包括了行同步信号、行消隐信号、场同步信号、场消隐信号以及槽脉冲信号等,因此,必须准确地把握各个信号之间的时序逻辑关系,才能实现对视频信号的采集.LM1881是针对视频信号的同步分离芯片,它可以从0.5~2 V的标准负极性NTSC制、PAL制、SECAM制视频信号中提取复合同步、场同步、奇偶场识别等信号,然后将这些信号送到单片机控制核心,这些信号都是图像数字采集所需要的同步信号.视频同步分离电路设计如图4所示,其中,C32和R24构成一个简单滤波电路,使视频信号更平稳,C31和R26构成了一个复位电路.图4 视频同步分离电路2.4 电机驱动电路电机驱动电路如图5所示.图5 电机驱动电路MC33886是一款专用于电机驱动的高效单片集成芯片,它最高能够处理10 kHz频率的PWM调制脉冲,并且能够向负载电机提供高达5.0 A的电流.在设计中,我们采用两片MC33886芯片并联驱动,这样不仅可以提高电机的输入电流,增大电机的实际功率,使电机在不增加动力源的情况下大大的改善其性能,还能够减少MC33886芯片的功耗.3 软件系统设计由于智能小车采用CMOS摄像头作为传感器,因此图像采集处理和智能小车转向及速度的控制是整个软件的核心.软件系统中,图像信号采集算法采用直接边缘提取算法以及图像滤波算法得到黑线的位置,并通过动态阈值以实时适应比赛环境,同时,编写了赛道识别的算法,以实现对典型赛道的决策控制.智能小车舵机和电机的控制算法使用了鲁棒性很好的经典PID控制算法,配合使用实际参数补偿的方法,使小车在行驶的过程中达到了快速稳定的效果.系统软件设计的流程图如图6所示.图6 系统软件设计流程图3.1 图像采集算法设计图像采集算法[2]的流程图如图7所示.考虑到实际赛道只是在白色KT板上布置黑色引导线,因此,可以采用隔行采集的思想来压缩图像的数据.经过实际实验发现,智能小车的图像传感系统在单一方向上只要有40个像素的分辨力就足够用了,其前22行视频为场消隐信号,为均匀采样288行视频信号,可以采样场信号29行、36行……,即每隔7行采集一次即可.3.2 黑线提取算法设计黑线采用直接边缘提取算法[3],识别黑线后,可以通过求平均值计算黑线的中心点.为进一步消除外界因素的影响和十字交叉线的干扰,必须对图像滤波加以矫正,具体步骤为:(1)根据图像模型去噪.赛道的黑色引导线是绝对连续的,不可能出现全白行.当某一行求取的中心线位置与相邻的两行相差较大时,可认为该行错误,需采用中值滤波方法重新获得该行位置.图7 图像采集算法流程图(2)当出现两段黑线情况时,比如,赛道比较密集,或是“十”字交叉道,或是大“S”弯道,可保留最底下的一段,并增加路径识别的算法,给出适当的控制策略.(3)由于摄像头可能相对于赛道存在一定的倾斜角度,因此采集到的图像可能存在一定的梯形失真,可通过添加一个线性修正值来消除,该线性补偿系数通过实验来确定.3.3 舵机转向和速度调节PID控制算法设计智能小车的舵机转向和速度调节采用PID控制算法[4]来控制,它结构简单、稳定性好、工作可靠、调整也十分方便.3.3.1 速度的控制.速度控制采取的基本策略是弯道降速,直道提速.因此,控制中需要根据当前测速和路面弯道情况来决定当前速度,当前速度反馈值与当前设定速度存在的偏差,记为 e (k).那么就可以通过偏差值来调节当前的速度值.在计算机上实现PID算法时,可通过数字PID调节器采用增量型算法来实现,增量式为,其中因此,运用PID控制的关键就变为调整3个系数 q1,q2,q3,即参数整定,在具体PID 参数整定时,我们采取了简化的扩充临界比例度法[4].通过PID算法对速度的调整后,最终将经过图像提取算法处理后的黑线位置和对应的PID参照速度处理成二次曲线的关系,使得小车在直道和弯道相互过渡时加减速比较灵敏.3.3.2 舵机转向的控制.在舵机控制时,采用PD控制可以达到较好的效果,将P项认为是计算得到的黑线的位置和图像中心位置的偏差,而D项认为选定行的黑线位置与上幅图像中的黑线位置的差值.我们在实际测试中发现,增加P项系数可以增强小车的沿线能力,实现小车的转向提前,达到切弯的目的,但是若P系数太大,也会导致大半径弧线切弯过度.加入D项系数后,可以使小车入弯时转向提前,出弯时转向减少,对大S弯切线很有好处.通过适当的调节PD参数可以使小车灵活的运行.3.4 赛道识别和弯道控制算法设计典型赛道如图8所示.赛道主要分为直道、小S弯道、急转弯、十字交叉等几种.对于直道,以及比赛中小于15°的上下坡,配合PID控制算法,具有较好的控制效果.但对于别的赛道可通过路径识别算法判断当前所处的赛道,针对实际情况做出相应的控制处理.赛道识别算法具体步骤如下:图8 典型赛道示意图(1)选取赛道上间隔一定距离的黑点,计算所选n个黑点的位置x相对于视场中心的平均位置x—= x/n.(2)平均位置与视场中心绝对值之差表示了当前赛道的弯曲程度,其值的正负表示了是向左弯曲还是向右弯曲,其值越大表示拐弯半径越小.(3)通过适当的选取黑点的间隔,可以达到比较明显的区分效果,能够顺利的识别出急转弯与直道,而小S弯道可能被识别为直道,这正是设计所希望的,即在小S弯道可以直接加速冲过去而不会偏出赛道.(4)对于起点和十字赛道的识别可通过黑线赛道两旁黑线部分的长度来识别,通过适当的设定其宽度值的大小,可以顺利识别.顺利识别赛道后,还需要对典型赛道做出相应的处理,其处理方法如下:(1)起始线.在定时一段时间后执行判断程序(保证在起始的时候不会停下来),判断读入的包含了起始线的图像的场数大于一个给定值(由于摄像头的前瞻性,在终点之前的一段距离,摄像头就识别到了终点,为了冲过终点)就让电机输出0.(2)急转弯.要求小车在急转弯处能够立刻减速,而PID调节难达到理想效果,可以在识别到急转弯时,让小车电机输出负值,从而使小车的后轮反转,这样可以保证小车速度迅速降下来.4 结语本文详细说明了带CMOS摄像头的智能小车系统中硬件和软件的设计制作过程.图像采集时,采用了压缩图像的方法,通过提取黑线并实现了动态阈值的设定,利用PID 调节使得舵机和电机输出得到了较好的控制,路径识别和决策控制的添加,保证了智能小车在弯道上平稳快速的行驶.参考文献:[1]王威.HCS12微控制器原理及应用[M].北京:北京航空航天大学出版社,2005.[2]蔡波.视频实时图像处理系统研究及设计[J].电视技术, 2005,29(5):23-25.[3]董翠敏.一种有效的图像二值化方法在CCD传感器图像信息处理中的应用[J].成都大学学报(自然科学版), 2009,28(4):1-4.[4]Park K H,Bien Z,Hwang D H.A Study on the Robustness of a PID-type Iterative Learning Controller against Initial State Error [J].International Journal of Systems Science,1999,30(1):102 -135.[5]王勤.计算机控制技术[M].南京:东南大学出版社,2003.[6]邵贝贝.单片机嵌入式应用的在线开发方法[M].北京:清华大学出版社,2004.[7]杨加国.单片机C语言与汇编语言混合编程[J].成都大学学报(自然科学版),2008,27(3):1-4.。
基于MC9S12XS128单片机的循双线智能小车系统设计

户 占用一个 I P地址 ,进而可以与多个用户共享资源数据。
( 2 )基于标准数据通信协议 的 G P R S 业 务 ,可 以实现 I P传 输数据 实现 网络的互通 。全 双工运作 的 G P R S保证 了系统 的接受和传输功能 , 并且计费是按照具体 网络流量来 收取 。
( 3) 核心层采用 I P技 术 的 G P R S 业 务 ,可 以支 持 多种 网络
4 系统 工作 的原 理
P L C通过读取寄存器 I WO的状态 ,并通过 4 8 5总线将
的互通传输 ,进而可 以实现各种终端的远程传输功能。
3 I 2 与 其他 无 线通 讯 方 式 比较
各种数据通过串 口发送 到 G P R S通信模块 ,P L C每定时 2 0 s
将 现场数据 发送 到 D U T,每黄劲.基 @S o c k e t 技 术的煤矿远程监控 系统
U ] . 工矿 自动 化 ,2 0 0 3 , ( 1 ).
1 0
此外 ,还增加 了功能选择按键 作为智 能车的 作方 式的快
设 计 中,使用 两排 “ 一字型 ”的传感器 ,各带 有四个一对
组网灵活 , 采用专用数据传输通道 , 比较适合于恶劣环境 。
5 结语
本 文设 计 的系统 已在工程得到应用 ,水泵可 以得 到远 程的控 制 , 上位机接受各个参量的数据的能力非常的稳定 ,
缺点是对 于同一频点上 ,同时 只能有 一个设备发送数 据 ,
加上 网络覆 盖面积小 ,容量有 限 ,网络后期的运营成本 相
同时设 置波特率 、数据位 、奇偶校 验位等信息 ,数据通过 4 8 5总线的数据 G P R S网络输出到 G P R S收发软件 ,并再将
基于MC9S12XS128微控制器智能车的软件设计

目录摘要 (III)关键字 (III)Abstract (IV)Key words (IV)第一章绪论 (1)1.1 背景 (1)1.2 现状 (1)1.3 技术路线 (1)1.4 本文结构 (2)第二章MCU (3)2.1 什么是MCU? (3)2.2 MC9S12XS128微控制器 (4)第三章开发环境 (6)3.1 CodeWarrior介绍 (6)3.1.1 新建工程 (7)3.1.2 编写代码 (7)3.1.3 编译和仿真 (7)3.1.4 调试程序 (7)3.2 编程语言 (8)3.3 规范化代码 (8)第四章总体设计 (9)4.1 硬件设计 (9)4.2 软件设计 (10)第五章软件设计 (12)5.1 系统模块初始化 (12)5.1.1 PLL (12)5.1.2 PIT (13)5.1.3 ADC (14)5.1.4 PWM (15)5.2 路面信息采集 (16)5.2.1 数字滤波 (17)5.2.2 黑线识别 (17)5.2.3 起始线、十字线、窄道和坡道 (18)5.2.4 黑线坐标计算 (19)5.3 PID控制算法 (19)5.4 无线传输 (21)5.5调试过程 (23)第六章设计总结 (25)参考文献 (26)附录 (27)附录一 (27)附录二 (27)附录三 (28)附录四 (28)附录五 (29)附录六 (30)附录七 (34)附录八 (35)致谢 (40)基于MC9S12XS128微控制器的智能车软件设计与实现摘要2006年,第一届“飞思卡尔”杯全国大学生智能车竞赛在清华大学举行,随着2009年第四届竞赛的成功举办,该竞赛的影响力越来越大。
竞赛要求在组委会提供的赛车模型上,使用飞思卡尔半导体公司的8位或16位微控制器,通过自行增加传感及驱动电路,和编写相应控制软件,制作一个能自主识别道路的赛车,按照规定路线行驶,以完成时间最短者为胜。
因此,在智能车制作中,控制软件的设计和编写是非常关键和重要的技术。
基于MC9S12XS128单片机的智能车控制系统的设计

文章 编号 : 1 0 0 2— 5 6 3 4 ( 2 0 1 3 ) O 1 — 0 1 0 6—随着 自动 控 制技 术 、 单 片 机
源 由寿命长 、 污染 小 的 7 . 2 V镍 镉充 电 电池 提供 , 由 于各 模块所 需 电压不 一 样 , 采 用稳 压 芯 片 对其 进 行 分压 , 同时采用 多路供 电 , 以减 少各模 块 问的相 互干
和M A T L A B软件对程 序 和参数 进 行调 试 , 使 小车 达
到最佳 行驶 状态 .
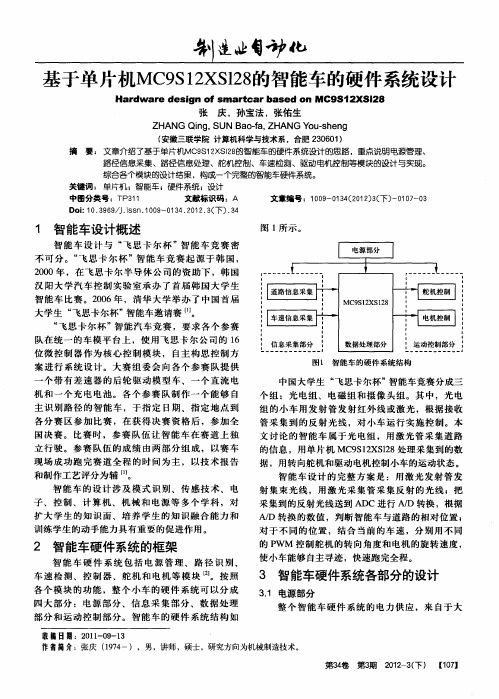
图 1 硬 件 系 统 构 架
1 系统 硬 件 总 体 构架
良好 的 硬件 电路 是 智 能 车平 稳 快 速 前 行 的保 障, 因此设 计过程 中要 充分考 虑其 可靠性 、 简 洁性和 兼容 性. 其 硬件 系统框 架如 图 1 所 示.
该点 的一个 邻 域 中各 点 像 素值 的 中值 代替 , 使 其 接
近真 实值 . 如 图 6和 图 7所 示 , 加入 噪点后 的 图像经
1 0 8
华
北
水
利
水 电
学
院
学
报
2 0 1 3年 2月
过 处理后 , 满 足系统 的要求
11 1 1 1 11 1 11 1 11 1 1 11 1 1 11 1 1 1 11 1 1 1 11 工 1 11 1 11 1 1上 土 t 11 1 11 1 1 1土 土 1 1 1 1 1 O 1 1 1 1 - m 1 1 1 1 1 11 1 1 1 11 1 11 1 1 11 土 11 1 1 1 11 1 1 11 1 1 1 l o l 1 l l l l 1 1 l l l l 1 11 1 1 1 11 1 11 1 1 土 1 1 11 1 1 1 11 土 1 1 0 1 1 1 1 1 1 1 1 11 1 1 土 t 1 11 土 1 11 1 1 1 11 11 11 1 11 1 11 土 1 1 111 1 1 11 11 土11 1 1 1 11 1 1 1 1 11 1 土 11 1 1 1 11 1 1 11 11 11 1 11 1 1 11 1土 1 11 1 11 土 1 1 11 1 1 土 1 1土 1 量 11 11 111 1 工 1 11 1 1 1 1 11 1 1 1 1 1 11 11 1工 土 11 1 1 11 1 1 1 11 1 1 11 11 11土 1 1 1 11 1 1 1 1 11 1 1 1 11 1 11 11 1量 1 11 1 1 11 1 1 O O O - m- m- m- m- m 1 土 1 1 土 11王1oo1置1111111111111111 1 11111 1 I O o 1 1 1 1 1 1 1 1 1 11土o000 1土土1土1土1111土土1111土11土o 111- m O11111- I 土 1 1 1 1 1 1 1 0 0 1 1 1 土 1 1 1 1 1 1 1 1 - m OO- m 1 i 1 1 1 1 1 1 1 1 1 0 O 1 1 1 1 1 王 1 1 土 1 1 1 O 0 1 1 1 1 土 1 1 童 1 量 1 土 0 O 1 土 土 1 1 1 土 1 1 1 1 1 1 O 1 1 1 1 1 1 1 土 1 1 1 1 1 O 0 1 1 1 1 1 1 1 1 1 1 1 1 0 O 1 工 1 1 1 1 1 1 1 1 1 O O 1 - m 1 1 1 1 1 1 1 1 土 1 oO 1 - m 1 1 1 1 土 1 1 1 1 O O 1 - m 1 1 1 1 1 1 1 1 1 O O 1 1 1 1 1 1 1 1 1 O O O 1 1 1 1 1 1 1 1 1 1 o O O 1 1 1 1 1 1 1 1 1 1 1 O OO 1 - m 1 土 1 1 1 1 1 1 O 0 0 1 土 1 1 1 1 1 1 O OO O 1 1 1 1重 1 1 1 1 1 O OO 1 1 1 1 1 1 I 1 0 0 O O 1 1 11 1 - m 1 1 1 O O O - m 1 - m 1 1 1 1 1 - m 1
基于MC9S12XS128单片机的智能小车设计系统

基于MC9S12XS128单片机的智能小车设计系统作者:张丹师宁来源:《电子技术与软件工程》2016年第20期摘要本文介绍了以Mc9s12xs128和SYN7318语音识别模块为主要硬件,采用单电路全桥驱动和蓝牙主从一体机结构的智能小车系统。
本系统通过摄像头来检测路面信息,并利用Mc9s12xs128控制算法调节驱动电机的转速和转向以及舵机的角度,实现了智能小车的多功能化,并可以实现语音识别、手机遥控、自动循迹等功能。
通过实际测试该智能小车各项指标均达到预期的设计目标。
【关键词】Mc9s12xs128单片机 SYN7318语音识别模块蓝牙主从一体机无线遥控小车是上个世纪在军事方面提出的一种自动化设备,它在军事侦察、防核化及污染、泥石流地震现场监测等危险与恶劣环境作业中有广阔的应用前景。
本文采用单片机控制来实现对小车的无线遥控、语音识别,自动寻迹、寻光及避障等功能。
我们主要对智能小车的各个模块进行了深入的分析及设计,从系统总体介绍、系统硬件设计、系统软件设计等方面进行研究学习,本车以摄像头为传感器的智能设计方法,通过摄像头检测路面情况,将测量数据传送至Mc9s12xs128单片机进行处理,然后通过Mc9s12xs128单片机对小车实施智能控制,最终实现了小车的自动循迹、语音识别、手机蓝牙遥控等功能。
1 系统总体介绍智能小车系统利用摄像头为传感器,利用Mc9s12xs128单片机对小车实施智能控制,单片机与SYN7318之间建立起UART通信方式,即可发送合成命令来实现文本的合成,单片机不需要理睬SYN7318的回传数据或状态引脚的输出。
但当模块处于语音识别和语音合成以外的其他状态时均需要按照标准流程发送命令。
手机遥控功能主要是利用手机蓝牙与小车蓝牙连接,通过手机发出指令到小车处理器,单片机通过对指令的处理,控制左右电机转向,以发出的命令不同实现小车前进、后退以及转向问题。
2 系统硬件设计Mc9s12xs128单片机是制作智能车的核心,配有无线遥控模块、语音合成模块电机驱动模块构以及循迹模块构成了控制系统的硬件,信息处理与控制算法由运行在单片机中的控制软件完成。
基于xs128的光电平衡智能车系统设计

基于xs128的光电平衡智能车系统设计文章旨在研制一种自平衡同轴双轮循迹小车。
系统以陀螺仪和加速度计来检测车身所处的状态和变化率,通过处理器(16位飞思卡尔单片机MC9S12XS128)计算出适当数据和指令,通过PWM驱动两个电机产生前进或后退的加速度使车达到保持平衡效果,以线性CCD光电传感器来识别黑线检测路径,阐述了自平衡的原理同时对系统用到的PID控制技术做了相应介绍,从理论上分析了变积分的PID控制技术的优势,并在系统的实际测试中获得了良好的效果。
标签:光电平衡;xs128;智能车1 引言随着智能化的发展,汽车的智能化、自动化是社会发展的必然趋势。
通过项目的研究使两轮自平衡小车能够智能的识别道路、加速、转弯、避障等复杂路况,实现智能驾驶。
同时两轮自平衡小车使得车体更加灵活、减少交通拥堵、停车困难等实际生活问题,对于提高人们的生活水平有实际意义,最终设计小车在规定路径上实现自动寻迹、智能壁障等功能。
2 平衡车原理通过对单摆进行受力分析可知,单摆能够稳定在垂直位置的条件有两个:受到与位移(角度)相反的恢复力;受到与运动速度相反的阻尼力。
控制倒立摆底部车轮,使得它作加速运动。
这样站在小车上看倒立摆,它在受到与车轮加速度大小成正比方向相反的惯性力的影响。
普通的单摆受力分析如图1所示。
当物体离开垂直的平衡位置之后,便会受到重力与悬线的作用合力,驱动重物回复平衡位置。
这个力称之为回复力,其大小为F=-mgsin?兹≈-mg?兹,在此回复力F作用下,单摆便进行周期运动。
在空气中运动的单摆,由于受到空气的阻尼力,单摆最终会停止在垂直平衡位置。
空气的阻尼力与单摆运行速度成正比,方向相反。
阻尼力越大,单摆越会尽快在垂直位置稳定下来。
这样倒立摆所受到的回复力为:式中,假设偏角θ与控制车轮加速度成正比,比例为k1。
如果k1>g那回复力与位移的方向相反。
另外,增加阻尼力能让倒立摆尽快回到原位置,阻尼力与偏角的速度成正比,方向相反。
基于MC9S12XS128单片机智能赛车的设计

基于MC9S12XS128单片机智能赛车的设计【摘要】本文是实现基于MC9S12XS128单片机智能赛车的设计,它是一种以规定的汽车模型为载体,采用16位微控制器XS128为核心控制模块,通过自主设计电源电路,电机驱动电路、道路光电传感器电路,硬件部分合理布局,同时编写配套程序,使其能够自主识别路径的模型赛车。
【关键词】智能车;MC9S12XS128;传感器;PID控制;直流伺服控制;PWM技术1.绪论MC9S12XS128单片机智能赛车的设计,它是以规定的汽车模型为载体,采用16位微控制器XS128为核心控制模块,通过自主设计电源电路,电机驱动电路、道路光电传感器电路,硬件部分合理布局,同时编写配套程序,使其能够自主识别路径的模型车。
它能在规定赛道上,以最短时间跑完全程,该设计主要包括机械设计,电路设计,软件设计三大部分。
1.1 国外智能车的发展历史伴随内燃机的诞生,在公路上行驶的汽车,经过一百多年持续发展,汽车技术已经有了很大的提高,人们在享受汽车的便利和舒适的同时,也发现汽车给社会的进步带来了许多麻烦,甚至危及到了人们的生命及财产安全。
同时,交通拥挤和环境污染问题也给城市的发展带来了严重后果。
因此,迫使我们不断采用高、新技术装备汽车,以提高车辆的安全性、可靠性并迅速解决公路交通的公害问题。
未来汽车概念将发生根本性的变化。
“汽车”将转变为带有一些辅助机械的机电一体化装置,汽车不再是个机械装置,它正向大众消费类电子产品转移。
智能汽车也就是人们常说的无人驾驶汽车,它的研制最早目的是为了前线战争和后方刑事需要,使它能够在危害场合代替人执行任务,从而减少人员伤亡以及财产损失。
现在这项智能技术主要有两方面的应用,首先是应用在民用汽车上,使计算机代替人成为汽车司机,将人们从大量的驾车时间中解放出来,并向新能源汽车以及更智能的方向发展,比如在主动安全、驾驶安全和行人安全方面等。
其次应用还是在军事方面,通过使用无人或遥控智能的武器平台来完成抢险救灾、排爆等工作,甚至还包括一些更危险的军事环境。
基于MC9S12XS128单片机智能寻迹小车的设计
基于MC9S12XS128单片机智能寻迹小车的设计摘要:本文给出了智能小车寻迹系统的软硬件方案设计和开发流程。
采用飞思卡尔mc9s12xs128单片机作为智能小车控制芯片,设计了电源、电机驱动、激光传感器以及测速等模块,小车的速度、转向控制采用pid控制方法,测试结果表明,小车能够平稳实现寻迹功能。
关键词:智能寻迹电机驱动激光传感器 pid控制中图分类号:u26 文献标识码:a 文章编号:1674-098x(2013)05(b)-0080-02该文以飞思卡尔杯智能车大赛为研究背景,研究了智能寻迹小车的软硬件方案设计和开发流程。
硬件电路方面采用飞思卡尔mc9s12xs128作为核心处理器,通过对比不同设计方案的性能,给出了智能小车电源、电机驱动、光电传感器以及测速等模块的设计方案并加以实现。
通过大量的实验调试完成了智能车的组装与机械部分调整,使得智能车结构更为合理。
在软件方面,主要设计了主程序、光电信号采集程序、pid控制程序、电机和舵机驱动程序等相关程序。
实验及实际比赛结果表明,软硬件配合良好,整个车辆稳定运行[1][2]。
1 系统总体方案智能车总体上分为单片机系统、传感器模块,电机驱动模块和显示模块。
首先,单片机通过激光传感器实现对路面黑色中心位置信息的实时检测,同时对反馈回来的偏移中心轨道的大小的信息进行算法处理后发出方向控制命令,输出相应的驱动信号至电机驱动模块,同时编码器测速装置也在实时获取小车速度,利用pid控制方法控制舵机和直流电机,提高小车的稳定性。
通过lcd显示器方便进行人机交互。
系统总体框图如图1所示。
2 硬件电路设计2.1 主控制器小车控制芯片采用freescale的mc9s12xs128单片机。
mc9s12xs128是一款增强型16位单片机,在mc9s12xe系列基础上去掉xgate协处理器,采用cpu12x的v2内核,可运行在40mhz总线频率上,它不仅在汽车电子、工业控制、中高档机电产品等应用领域具有广泛的用途,而且在flash存储控制及加密方面也有很强的功能。
基于单片机MC9S12XS128的智能车的硬件系统设计
智 能 车 的 设 计 涉 及 模 式 识 别 、 传 感 技 术 、 电
子 、控 制 、计 算 机 、 机 械 和 电源 等 多个 学 科 ,对
扩 大 学 生 的知 识 面 、培 养 学 生 的 知 识 融 合 能 力 和
训 练 学生 的动 手能 力具 有重 要 的促 进作 用 。
2 智 能车硬 件系统的框 架
文章编号 :1 0 - 1 4 2 1 ) ( ) 0 7 0 9 0 ( 0 2 3下 - 1 - 3 0 3 0
关键 词 : 单片机 ;智 能车 ;硬件系 统 ; 设计 中图分类号 :T 3 P 1 1 文献标识码 :A
D i1 .9 9 Jis .0 9 1 4 2 1 .( ) 3 o : 3 6/ . n 1 0 -0 3 .0 3 下 .4 0 s 2
一
图 1 智 能 车 的 硬 件 系 统 结 构
个 带 有 差 速 器 的 后 轮 驱 动 模 型 车 、 一 个 直 流 电
中国大 学生 “ 思卡 尔 杯”智能 车竞 赛 分成三 飞
个 组 :光 电 组 、 电磁 组 和摄 像 头 组 。其 中 ,光 电
机 和 一 个 充 电 电 池 。 各个 参 赛 队制 作 一 个 能够 自
和制作 工 艺评 分为 辅 u。
组 的 小 车 用 发 射 管 发 射 红 外 线 或激 光 ,根 据 接 收 管 采 集 到 的 反 射 光 线 ,对 小 车 运 行 实 施 控 制 。本 文 讨论 的 智 能 车 属 于 光 电组 ,用 激 光 管 采 集道 路
智能小车系统设计毕业设计论文
摘要随着科学的发展和科技的进步,人们在完成一件事情的时候不单单只关注结果而且也越来越多的考虑过程的影响,比如说对环境的影响还有方便程度等,而且对智能化的要求也越来越高。
两轮智能车不仅节省了空间而且节省了能源,为人们未来的生活带来了不少好处。
本系统以MC9S12XS128MAA单片机为核心,其中还包括倾角检测模块、速度检测模块、电源模块、电机驱动模块、路径检测模块、拨码盘组成。
电源模块把7.2V电压转换为5V、3.3V电压,速度检测模块检测电机的速度,倾角检测模块检测智能车的倾角从而为控制智能车的直立提供信息,拨码盘可对电机的速度进行直接设定。
本系统有两个电机驱动,一个电机驱动一个轮子,通过电机转速的不同实现方向控制和直立控制。
本智能车可以沿着特殊的路径进行智力的行走。
本系统显示了高度的智能化,可以为无人驾驶汽车的后续研究提供经验,方便人们的生活和工作。
关键词:MC9S12XS128MAA单片机、传感器、PID算法AbstractWith the development of science, When finish one thing people don't just f ocus on results, but also more and more considering the influence of the proce ss .For example the influence of environment and the convenience of life. And people have high requirement of intelligent. Two rounds of smart car n ot only saves space and save the energy. Make people’s life more and more c onvenience and comfortable.This system with MC9S12XS128MAA single-chip microcomputer as the co re.This system aslo contains Angle detection module、Speed detection 、module power module driver module of electric motor 、Path detection module. Dial th e encoder. The angle can offer information to make the smart car upright. Pow er supply module convert voltage of 7.2 V to 5 V, 3.3 V voltage. Speed detec tion module to detect the speed of the motor. Dial the encoder can be set spe ed of the motor .This system has two motor ,one motor drive one wheel Thro ugh the speed of the motor can make the smart car upright. The smart car c an walk along a path of special intelligence.This system shows the highly intelligent.Make people’s life more conveni ence.At he same time can save a lot of time to do other things.Keyword: MC9S12XS128MAA、sensor、PID arithmetic第一章引言1.1两轮自平衡小车研究的意义两轮自平衡小车的研究是在移动机器人研究的基础上发展起来的。
一种基于MC9S12XS128单片机的多功能智能小车设计

一种基于MC9S12XS128单片机的多功能智能小车设计
摘要:利用嵌入式技术和智能汽车是智能系统与汽车工业相结合的产物,它是一个集计算机、传感器、自动控制、人工智能等多种高新技术于一体的综合系统。
它在保证行驶安全、提高驾驶体验、节能环保等方面发挥着越来越重要的作用。
作为未来汽车行业的发展方向,它的发展势必促进其他行业的发展,并在一定程度上代表了一个国家在智能控制方面的水平。
智能小车系统在环境感知、数据处理、控制策略及系统搭建上与智能汽车系统有很多相似之处,可以为科考、抢险救灾提供安全路径,未来也可以用在军事探测、运动目标跟踪预警等方面。
智能小车系统的研究可以推动智能汽车行业更快更好地发展。
文中对智能小车的各个模块进行了深入的分析,从系统总体概述、硬件设计、软件设计等方面介绍了以摄像头为传感器的智能小车的设计方法:在现有车模的基础上,通过加装摄像头、殖度检测器,比较器,实现对小车速度、位置、运行状况的实时测量,并将测量数据传送至单片机进行处理,然后通过单片机对小车实施智能控制,最终实现了小车的自主行进功能。
1 系统的总体概述
智能车系统的总体工作模式为:利用CMOS
2 系统的硬件设计
智能车以MC9S12XS128 处理器为核心,通过CMOS 模拟摄像头
OV5116 获取行进路径,对道路信息进行提取,根据小车的姿态与道路之间的
偏差产生控制量,控制舵机进行转向,编码器实时反馈电机转速,使速度控制更精确,实现对小车更好的控制。
本系统的硬件设计主要包括以下4 个模块。
2.1 摄像头有CCD 和CMOS 两种:CCD 摄像头具有对比度高的优点,。
基于MC9S12XS128单片机的路径图像识别智能小车

第 1 3期
甘 肃科 技
Ga n s u S c i e n c e a n d T e c h n o l o g y
l f . 2 9 N o . 1 3
2 0 1 3年 7月
】 m. 2 0 1 3
基 于 MC 9 S 1 2 X S 1 2 8单片 机 的路径 图像 识别 智 能小 车
策 略进行 综合 控制 。 系统 结构 如 图 l 所示。
智 能 车 控 制 系 统 电 路 由 3 部 分 组 成:
MC 9 S 1 2 X S 1 2 8为 核心 的最小 系统 板 、 主板 。最 小 系
统板可以插在主板上 , 组成了信号采集、 信号处理、
电机控制 、 舵机 控 制单 元 。 为 了减 小 电机 驱 动 电路
取、 二值化算法、 求重心、 算左右偏差、 求斜率、 判断
直道 长度 、 边缘干 扰 的处 理 。 2 . 2 电路 设计方 案
舵机采用 P D控制 ; 驱动 电机采用 P I D控制 , 通过 P WM控制驱动电路调整电机的功率 ; 而车速的目标 值由默认值 、 运行安全 方案和基于图像处理 的优化
算法控制舵机 , 位置式 P I D算法控制 电机 , 实现对智 能车运动方 向和运动速度 的闭环控 制。整个系统 涉及 车模机械
结构调整 、 传感器 电路设 计及信号处理 、 控制算法和策略优化等多个方 面。实验结果表明 , 设计方案确实可行。
关键词 : 智 能车 ; MC 9 S 1 2 X S 1 2 8 ; 图像二值化 ; 图像处 理 ; P I D控制 中图分类号 : T U 9 9 1 . 8
随着 科技 的不 断 发 展 与进 步 , 智 能 控制 的应 用 越来越 广泛 , 智能 车技 术依 托 于智 能控制 , 有着极 为
基于MC9S12XS128单片机的智能小车设计与实现
路 采 用脉 宽调 制式 变 换 器 , 宽调 速 也 可通 过 单 片 脉 机控 制继 电 器的 闭合 来 实 现 , 实现 了小 车 正 向和 逆
向行 驶 。 2 2 光 电检 测模块 .
本 设计 中将 4个红 外 对 管分 别 装在 小 车两 侧 , 小 车通 过两 侧光 电检 测 来 寻 迹并 按 照 轨迹 运 动 的 , 以及通 过光 电检 测来对 黑线 技术 而共 同控制小 车 的 运 动 。小车 的一个 红 外 对 管 检测 黑 线 , 另一 个 检 而
行 ( ) 1。
4 智 能小 车 控 制 系统 软 件 设 计
通 过 对智 能小 车 的 程序设 计 实 现其 平 稳 控 制 、
可靠检 测 、 确超 车的功能 。计算 两 车准确 的距离 , 准
从 而确定 两 车的相对 位置 。 () 1 主程 序
主 程 序 流 程 图 如 图 6所 示 。
过程。 () 色互换 3角
完成 整 车硬 件调 试工 作 。各项 硬件 测试 指标 达到 预 期设 计要 求 。智 能小 车硬 件实 物 图如 图 5 。
当检 测到 起始 线 时标 记 清零 , 并通 过 无线 通 讯
进行 两 车 通 信 , 乙两 车 实 现 角 色 互 换 , 新 执 甲 重
!墨 墨
Q: !
长春工程学院学报 ( 自然 科 学 版 )2 1 年 第 l 卷 第 4期 01 2
J Ch n c u n t Te h ( t S i Ed . 。 0 1 Vo . 2, . . a g h n I s. c . Na . c . i ) 2 1 , 1 1 No 4
根据 题 目的基 本要 求 , 计 任务 主 要 完成 电动 设
基于MC9S12XS128的双轮平衡车控制系统设计毕业设计
基于MC9S12XS128的双轮平衡车控制系统设计[摘要]本文主要介绍了双轮平衡车的控制系统设计方案。
采用MC9S12XS128作为核心控制器,在此基础上增加了各种接口电路板组成整个硬件系统,包括单片机最小系统,直流驱动电机控制模块,电源管理模块,测速编码模块,人机交互等模块。
软件调试部分依次对应硬件各模块进行程序设计,包括A/D模块,PWM模块,ECT模块,PID控制算法,人机交互控制等。
完成车模的制作和软件设计后对整个控制系统进行调试,先阐述了调试的策略,再分别就现有调试工具条件下的软件和硬件调试进行了分析,对相应的调试方法做了基本的介绍。
最后根据调试情况对整个系统做了修改,基本达到设计要求。
[关键词]双轮平衡车;MC9S12XS128;模块设计;调试策略Based On MC9S12XS128 of the Two-wheeled BalancingVehicle Control System DesignElectrical Engineering and Automation Specialty CHEN MingAbstract: This article mainly introduces the balance of the Two-wheeled balancing vehicle control system design scheme. The MC9S12XS128 as core controller, on the basis of interface circuit board of increasing the hardware system, including single chip minimize system, dc motor control module, power management module, code modules speed, man-machine interaction module. Software debugging session in the corresponding module design program, including A/D module, PWM module, ECT module, PID control algorithm, the man-machine interactive control, etc. Accomplish the production and the software design draw after the whole control system for debugging, first expounds the commissioning of the strategy, second,different debugging tools under the conditions of existing software and hardware debugging are analyzed, the corresponding debugging method basic introduction. According to the situation of the whole system debugging have modified, basic to meet the design requirements.Key words: the Two-wheeled balancing vehicle; MC9S12XS128; MODULAR DESIGN ; Debugging strategy目录1 引言 (1)1.1 双轮自平衡小车的研究意义 (1)1.2 双轮自平衡小车的发展历程和现状 (1)1.2.1国外的研究成果 (2)1.2.2国内的研究成果 (2)1.3 本课题的研究内容和关键问题 (2)2 双轮平衡小车系统的总体概述 (3)2.1 系统组成 (3)2.2 系统各模块的主要功能 (3)2.3 系统的主要特点 (4)3 双轮平衡小车硬件电路设计 (4)3.1 整体电路设计 (4)3.2 单片机最小系统 (5)3.3 直流驱动电机控制电路 (6)3.4 电源模块电路设计 (6)3.5 测速编码电路设计 (7)3.5.1 陀螺仪电路 (8)3.5.2 编码器电路 (8)3.6 人机交互接口电路设计 (9)3.6.1CAN总线与LIN总线设计 (9)3.6.2通信接口设计 (10)3.6.3人机交互电路设计 (10)4 双轮平衡小车软件设计 (11)4.1 软件模块功能与框架 (11)4.1 A/D模块 (12)4.1.1A/D转换原理 (12)4.1.2A/D转换模块功能结构 (12)4.1.3A/D转换模块的编程步骤 (13)4.2 PWM模块 (13)4.2.1PWM的主要特点 (13)4.2.2PWM应用及初始化 (14)4.3 ECT模块 (14)4.4 PID控制算法 (15)4.4.1PID控制原理 (15)4.4.2 PID参数的整定 (16)4.5 人机交互 (16)4.5.1 LCD液晶显示 (16)4.5.2 矩阵键盘按键识别 (17)4.5.3 串口与上位机的通讯 (17)5 双轮平衡小车的系统调试 (18)5.1 调试策略 (18)5.1.1硬件调试 (18)5.1.2软件调试 (18)5.1.3综合调试 (18)5.2 串口调试 (18)5.2 监控调试 (20)5.3 无线调试 (21)5.3.1无限遥控开关 (21)5.3.2无线通信模块 (21)6 结论 (23)参考文献 (24)附录1:单片机最小系统原理图 (25)附录2:单片机最小系统电路图 (26)附录3:单片机最小系统PCB图 (26)致谢 (27)1 引言本章简要的介绍了两轮自平衡小车的起源与发展、研究意义以及国内外的研究现状,并依此提出了本论文研究的主要内容。
基于MC9S12XS128的智能小车超车控制系统
基于MC9S12XS128的智能小车超车控制系统孙继元;苑广军【期刊名称】《微计算机信息》【年(卷),期】2012(000)009【摘要】针对2011年全国大学生电子竞赛C题-智能小车的设计要求,本系统采用飞思卡尔公司MC9S12XS128单片机为主、STC89C52单片机为辅作为智能小车的检测和控制核心。
系统采用TCRT5000红外识别技术和超声波探测技术,将检测到的数据传送给单片机,对数据进行相应处理,LCD液晶显示及语音播报。
实验证明,系统方案合理,性能良好,能够实现竞赛题目的各项要求。
%Meeting to the design requirement of the C topic,Electric Vehicle,of the 2011 National Undergraduate Electronic Design Contest,STC89C52 andMC9S12XS128,product of free-scale,were adopted in the system as speed of detection and control,and the time and status of electric vehicle was displayed by LCD.The voice module was adopted into man-machine communication.The TCRT5000 module and the Ultrasonic detection technology were also adopted to transmit data for Single chip Microcontroller.The experiment shows that the proposed project is reasonable,and the performance of the system is good,and all requirements of the contest topic were realized completely.【总页数】2页(P154-155)【作者】孙继元;苑广军【作者单位】吉林北华大学;吉林北华大学【正文语种】中文【中图分类】TP29【相关文献】1.基于MC9S12XS128单片机的智能小车控制系统设计与实现 [J], 鲁小雨2.基于MC9S12XS128单片机的多功能智能小车系统设计 [J], 张德宇;侯立刚;张晓勇;常龙昆3.基于MC9S12XS128的智能小车硬件系统设计 [J], 成郑4.基于MC9S12XS128单片机的智能小车设计系统 [J], 张丹;师宁;5.基于MC9S12XS128的电磁智能小车的硬件设计 [J], 高海沙;丁晓慧因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
有错误代 码纠正功能 ; 带有 E C的 4 B 8 B a Fah C K 至 K Dt l , a s 用 于实现数据或程序 的存储 ; 可配置 8l 、2 A C 可实 、 l位 D , 0
【 参考文献 ]
字木 交 i 赢
理缝 , 研发 , 计 , 设 翻造
基于P 91 S2 MC 新型视觉 CS2 1 U的 X 8 智能车控制系 统设计
孙 敏 , 李 学 慧 , 韩 以伦 , 庄 立 富
( 山东 科 技 大 学 机 械 电子 工 程学 院 ,山 东 青 岛 2 6 1 ) 6 5 0
u i t e e i l .w ih c n b r e t o lw t e l e o a e . h i o t ls s m n l d n tr g h c a e f o f l h i ft v 1 T e man c n r y t i c u i g moo e o n r o e d i e mo ue,e v r d v mo u e t e p t d n i c t n mo u e p we d l r d l s re r e v i d l , h a h i e t ai d l , o r mo u e,e c. r u h c mp rn a ey o i f o t. h T o g o a g a v r t f i i
Ke r s o t 】 y t m; n e l e tv h ce a tma i r i g y wo d :c n r s se I tl g n e i l ; n o t d i n o i c v
本文以 l 6位 P 9 1X l8 片 机 为 控 制 核 心 , C S2 S2 单 路
Ab t a t n t i p p r C9 XS 8 MC r d c d b r e c l e c n u tr C . t S u e s te c r o to sr c :l h s a e ,P Sl 2 l 2 U p o u e y F e s a e S mio d co o ,L d i s d a h o e c n r l
( ca i l lc o i adE gneigIsi t.S ad n nvr t o cec n eh o g , nd o26 1 C ia Meh nc et nc n nier ntue hn ogU i s y f i eadT c nl y Qiga 6 50,hn ) aE r n t e i S n o
GROCHE P,VON BREI TENBACH G,J OCKEL M ,e 1 ta.Ne w
宽X 为 2 0 高 7 mmx 6 mmx O 10 8 mm的模 型 车作 为 实验 装 置 , 通过 软硬 件设 计 及程 序 改进 ,完 全 达到智 能 车 自主循 线 行驶 的 目的 , 为新 型视 觉智 能车 的应用 奠 定 了基础 。 1 F e saeMCU简 介 re c l
h r wa e c n r lp o r m ,h e tp o r m sa p i d t o t l h a d lS s e d a d dr c i n x e i n a e u t a d r o t r g a t e b s r g a i p l o c n r e c rmo e ’ p e n ie t .E p r o e o t o me t lr s l s s o h t h n el e t e i l e i n d c n a t ma i d v n t e p t fh ma l n a c r tl . h w t a e i t l g n h ce d s e a no t r e o h a h o u n p a c u ae y t i v g c i
2 硬件 电路 设计
智 能车 硬件 系统 自主循 线行 驶 的可 靠 保 证 ,智能 车 控制 系
统 的硬 件部 分 主要 包 括 6个 模 块 的 设 计 ,
如图 l 所示 。
智 能车 控 制 系统 的 核 心单 元 为 清 华 Fesa C / 的设 计 是实 现 智能 车 recl M U e D P应 用 开 发 研 究 中心 设 计 的 名 为 9 1X 18的 系 列 S S2 S2 单 片机之 一 , 主要 特点 有 :
De i n o s a nt l g n h c e Co t o y t m s d o sg fViu l I e l e tVe i l n r lS s e Ba e n PC9 1 XS 2 CU i S 2 1 8M
SUN i LIXu - u . HAN — u ZHUA M n。 eh i Yi l n, NG — h Li f
现3s 的转换时间; 支持 C N LNS I A 、I 、 协议; ) P ( 带有 1 位 6 6
路、 晶体振荡 电路及 时钟电路 串行接 口 R 2 2 S 3 的驱动 电路 ,
+ V电源插座 。 5
径识别功能由 s 8 t 8反 射 式 红 外 传 感 器 实 现 ,采用 长 X 计 数器 、 1 8通道定时器 ;板上 有构成最小 系统必 要的复位 电