首届全国大学生智能农业装备创新大赛章程
全国大学生智能农业装备创新大赛章程

全国大学生智能农业装备创新大赛章程(修订稿)第一章总则第一条全国大学生智能农业装备创新大赛(以下简称“大赛”)旨在进一步激发广大同学热爱农业装备、学习农业装备科技、投身农业装备事业的积极性和主动性,大力提升农业装备类学生的工程创新能力和实践应用能力,为我国实现由农业装备大国向农业装备强国迈进提供人才支撑。
第二条大赛由教育部高教司委托教育部农业工程类专业教学指导委员会会同中国农业机械学会、中国农业工程学会以及江苏省现代农业装备与技术协同创新中心主办,相关具有农业工程学科的高校承办,行业企业冠名和支持。
第三条大赛原则上每年举办一次,原则上大赛作品启动时间为上半年,大赛终审决赛时间为下半年。
第二章组织机构及其职责第四条设立大赛指导委员会、大赛委员会、大赛评审委员会、大赛组织委员会以及大赛秘书处。
第五条大赛指导委员会和大赛委员会由中国农业机械学会、中国农业工程学会、教育部农业工程类专业教学指导委员会以及江苏省现代农业装备与技术协同创新中心4家主办单位聘请有关负责人与专家组成。
大赛指导委员会不设立任何职务。
大赛委员会设主任1名,副主任3~5名,下设秘书处(挂靠发起单位江苏大学),人员聘期4年,若有人事变动等原因,可由大赛委员会作调整。
第六条大赛指导委员会工作职责1.对大赛举办提出宏观的建设性意见和建议。
2.对大赛章程和实施方案提出具体的指导意见。
第七条大赛委员会工作职责1.审议大赛章程和大赛实施有关方案;2.审议大赛评审委员会成员、评审规则、获奖比例;3.讨论和确定大赛的承办单位;4.负责涉及大赛组织、评审等其他重大问题。
第八条大赛评审委员会设主任1名,副主任2名,秘书长1名,秘书若干名。
主要工作职责是根据评审规则制定大赛的评审实施细则,对参赛作品进行评审、并确定获奖作品等级,负责处理大赛过程中的有关专业技术问题第九条大赛组织委员会由承办单位有关人员组成。
具体由承办高校自主设置有关机构。
第十条大赛组织委员会工作职责1.负责具体组织实施大赛的宣传发动、项目评审、开幕闭幕、作品展示、大赛文化活动组织等有关大赛的全过程事项。
农业创新大赛项目计划书
农业创新大赛项目计划书一、项目背景随着全球气候变化和人口增长,全球粮食需求正逐年增长。
然而,传统农业模式在面临日益严峻的挑战,包括土地和水资源的枯竭、化肥农药的过度使用、农业劳动力短缺等问题。
因此,农业创新已成为全球农业领域的关注焦点。
为了推动农业技术的创新和发展,我们决定发起一场农业创新大赛,并邀请全球各地的农业专家和创新者共同参与。
二、项目目标本次农业创新大赛的目标是鼓励和支持农业领域的创新,推动农业生产方式的转型升级,提高农业生产效率和质量,促进农村经济发展和农民增收。
具体目标包括:1. 鼓励创新思维和跨界合作,推动农业科技和产业融合发展;2. 探索绿色可持续的农业生产模式,实现农业生产的高效、低耗、环保;3. 提高农产品质量和品牌竞争力,拓展农产品市场;4. 推动农村经济结构调整和产业升级,促进农民增收。
三、项目内容本次农业创新大赛将包含以下内容:1. 农业科技创新赛:重点关注以科技为支撑的农业生产技术和装备的创新,如智能农业、精准农业、设施农业等;2. 农产品营销创新赛:重点关注农产品品牌建设、营销渠道创新、农产品定制化等;3. 农村产业发展创新赛:重点关注农村产业结构调整、农产品加工创新、特色农业产业发展等。
四、项目计划1. 筹备阶段(1-2个月):确定项目组织架构、制定项目计划、筹备项目资金、招募参赛选手、确定评审标准等;2. 报名阶段(1个月):向全球范围内发布参赛通知,面向有关农业领域的科研机构、高校、企业和个人征集参赛作品;3. 评选阶段(2个月):组织专家评审团对参赛作品进行评选,并选拔出优秀作品参加决赛;4. 决赛阶段(1个月):举办农业创新大赛决赛活动,评选出获奖作品,并颁发奖项;5. 推广阶段(长期):对获奖作品进行推广宣传,鼓励更多的农业领域创新者参与农业创新。
五、项目预算本次农业创新大赛的预算为XX万元,其中包括:1. 组织筹备费用:XX万元;2. 奖金及奖品费用:XX万元;3. 推广宣传费用:XX万元。
东方红杯第一届全国大学生智能农业装备创新大赛A类本

“东方红”杯第一届全国大学生智能农业装备创新大赛A类本科生获奖作品名单(特等、一等、二等奖)序号作品编号作品名称高校名称团队成员指导教师名次1 28 面向农情信息采集的小型四足柔性机器人南京农业大学刘成龙、宋勇、王睿、牛鹏帅、张静章永年、史立新特等奖2 69 农村太阳能泵站与无线充电站江苏大学夏华猛、黄忠裕、夏承春、杜育轩、胡方圆赵不贿特等奖3 99 新型龙眼干燥机中国农业大学张阳、乔冠瑾、王凯高振江特等奖4 49 基于GPS、北斗双模定位的智能履带耕作车河南科技大学冀福华、陈凯康、白俊超、高胜标、吕赛赛庞靖特等奖5 30 羊只饲养智能饲料机器人内蒙古农业大学邓庆好、焦彦东、王旭东、郭飞鹰武佩、李海军特等奖6 17 基于体感的三臂多功能农业机器人东北农业大学冯正阳、刘佳伟、李成林权龙哲特等奖7 51 旱地双垄沟全覆膜智能可调节残膜回收机华南农业大学梁嘉业、李德正、邱汉、吴泽松、刘朗钟强一等奖8 87 微型履带式田间信息采集机器人河南科技大学魏硕勋、胡海洋、雍利云、赵振凯、石傲飞金鑫一等奖9 108 禽蛋品质检测流水线系统南京农业大学陈青、丁婧、闫思蒙、水恒琪、肖宏伟卢伟、罗慧一等奖10 101 立体式智能芽菜培育机东北农业大学王启晗、孟晓、邢锡华权龙哲一等奖11 73 自适应智能爬树移动平台机器人山东理工大学杜炳呈、钟浩、陈立新、张满泰、丰重光张彦斐一等奖12 22 三菱PLC在智能温室大棚系统中的应用沈阳农业大学吴登盛、郭睿、任楠、吴红亮、王绪鹏王永刚、张楠楠一等奖13 103 湖泊水藻垃圾遥控收集船沈阳农业大学王芳、祖宏鹏、朱红杰、左伟亮、代丰宁白雪卫一等奖14 27 农田高清图像与信息采集机器人华中农业大学柯学、王丰圆、郑岳智、姚鹏娇、杨锋魁刘浩蓬、徐胜勇一等奖15 59 马铃薯杀秧机仲恺农业工程学院詹旭峰、黄家荣、沈素冰、刘仁杰王毅、熊平原一等奖16 64 云端农用机车调度及其工况检测系统黑龙江八一农垦大学肖跃进、李傲强、席冬旭、王杰、李新宇梁春英一等奖17 11 基于stm32的智能种子存储仓控制系统设计华南农业大学钟方浩、邱汉、袁镇海、黎智韬、莫康华段洁利一等奖18 38 智能仿生韭苔、韭花收获分离一体机山东理工大学于晨曦、张学林、赵勇、王占辉、刘传鑫巴连良一等奖19 117 破损禽蛋分拣装备设计华中农业大学郑岳智、杨锋魁、姚鹏娇、柯学、王丰圆卫佳一等奖20 86 智能烟草中耕除草培土机河南农业大学吴响、苑昭、仝振伟、刘云鹏、黄浩张秀丽一等奖21 66 具有远程视频回传功能的智能型农用四翼飞行器佳木斯大学吴庆越、于宝越、王琪、周华剑、张帅葛宜元、韩乐江一等奖22 1 基于GPS模块的智能电动排种器东北农业大学吴翔、温欣、李贵宾、刘潇、韩腊刘冬梅一等奖23 98 果园自动喷洒机模型云南农业大学冯兆松、蒋大江、付镓榕、蔡晓俊、李世通张永华一等奖24 37 基于PLC的玉米智能脱粒试验台山东理工大学宋元广、曹庆秋、马国义、曹明雷、穆培良王淑君一等奖25 79 农作物智能喷雾装置安徽农业大学俞志伟、余茂鑫、罗磊、荀元武、邓茜刘权一等奖26 34 多自由度谷物清选筛分装置江苏大学何俊增、刘新旺、邢家珲、章浩唐忠二等奖27 15 一种可应用于设施农业的滑动弧放电固氮发生装置中国农业大学杨瑾、李田月仲崇山二等奖28 102 基于密度传感器的马铃薯淀粉含量测定仪东北农业大学张伟、李平安、丁林林、石晓宽刘立意二等奖29 2 基于可控光湿度智能育秧系统东北农业大学杨茜月、贾海斌、高胜晗、罗泽军、禅一平王奕娇二等奖30 45 智能山地果园运输机华南农业大学卢诗静、沈国威、林晓锋、张祺生、王可欣吴伟斌二等奖31 72 智能手机可视可控多功能油动施药机山东理工大学陈国维、孙崇菲、于殿富杨振宇二等奖32 104 农业液态物料定量分装装置沈阳农业大学王鑫坤、迟博文、王保娟、杨荣晓崔红光、王君玲二等奖33 5 一种基于ZigBee的农作物播种无线监测器沈阳农业大学梁日鹏、胡栢硕、李震、杨荣晓、徐乾云崔红光、任文涛二等奖34 107 新型多模式硬壳类果实、种子分类分装机沈阳农业大学刘兰新、王新彬、吴广、高魏华、王鹏付立思、石敏慧二等奖35 58 一种手持式智能打顶机华南农业大学张亦伦、黄进杰、黄泽雄、唐松泉、卢毛毛贾瑞昌二等奖36 90 基于leapmotion手势的wifi大田监控机器人华中农业大学胡振国、刘金、吴太晖、宫雪、李茂徐胜勇二等奖37 65 可移动式智能田间管理设备东北农业大学曲春明、刁志钿、康野、李博文、史梦婷张影微二等奖38 19 智能温室环境参数调控系统与设备东北农业大学徐智超、吕国生、李云峰、卢国立、赵文娟王奕娇二等奖39 40 四足式柔性田间运输机器人潍坊学院赵艺霖、田玉泰、陈即彪、侯会东、王振宁宋健、解福祥二等奖40 93 多功能田间除虫驱鸟装置三峡大学孟凡答、夏欢、全小鹏、罗凯乐、高毓民孙爱华、常文娟二等奖41 12 智能型家庭植物生长箱仲恺农业工程学院林文松、徐海、林嘉良、杨晓生、方扬侨马稚昱二等奖42 61 多功能去雄喷药机中国农业大学何柳婷、张宝月、毕瑞芳刘平义、魏文军二等奖43 48 全自动大葱收获机山东科技大学汤佳琛、王世伟、由韶泽杨德星、庄兴华二等奖44 42 大棚蔬菜自动装载机潍坊学院田玉泰、赵艺霖、宋良、侯会东、张景禹解福祥、王长春二等奖45 113 多用途智能新鲜菌草烘干机组福建农林大学洪肇晓、李鸿、林星、江道淮、黄金龙郑书河、黄圣惠二等奖46 8 智能大蒜直立播种机山东理工大学王亚豪、崔志超、贾宗福蔡善儒、宋井玲二等奖47 100 基于ZigBee的智能干燥机黑龙江八一农垦大学李海龙、康俊佳、付成奇、白钰、梁琦车刚二等奖48 81 基于物联网技术的新型茶园节水灌溉系统福建农林大学赖国锋、陈锐、邓欣荣、林志忠叶大鹏二等奖49 77 远程控制田间察看机器狗安徽农业大学钱玉芬、许娜、余若雪、张冰辰、张定坤王硕二等奖50 116 谷类农作物不停机称重系统华北水利水电大学豆文杰、张冬辉、李超贤、王其滨刘新宇二等奖51 21 基于μC/OS–II与Zigbee的智能温室控制系统沈阳农业大学刘阳、谢卿豪、王维良、毛晓丽李征明二等奖52 47 带有智能检测的深松机山东理工大学王永刚、谭辰、邓子杭、李培勇、张福印蔡清吉二等奖53 83 全自动航空喷药机河南农业大学鲁科冰、尹会林、郑振潭、刘云鹏何玉静、张红梅二等奖54 6 大蒜定向栽植机沈阳农业大学张博轩、刘永彪、孙大开、徐晓睿、杨灿宋玉秋二等奖55 109 多功能家用智能面食一体机山东理工大学邓凯、杨恩祥、孙达、刘彩虹、林传钦蔡善儒二等奖56 36 用于温室的茄果类蔬菜采摘机械臂系统南京农业大学古炜豪、乔蕴仪、贾蕴发、钟泽宇、王挺邹修国二等奖57 95 基于DGPS的智能果树施肥机华南农业大学彭勇兴、詹健、林世松、罗帆、曾忠强张增学二等奖58 39 草莓采摘机器人潍坊学院侯会东、陈即彪、宋良、赵艺霖、田玉泰王长春、宋健二等奖59 68 水稻中耕施肥机沈阳农业大学高健博、王斌、崔志杰、王杰、马宏志邬立岩二等奖60 110 智能无级调距式鳝类分拣机安徽农业大学高平平、余涛、王玉清、何刘进、张治新周平二等奖61 62 苹果套袋机山西农业大学陈帅、徐金、李聚才、于艺春、刘富玺冯晚平二等奖“东方红”第一届全国大学生智能农业装备创新大赛A类研究生获奖作品名单(特等、一等、二等奖)序号作品编号作品名称高校名称团队成员指导教师名次1 181 磁力轮式塑料大棚棚顶清洗装置西南大学刘宏博、赵进、朱康熹、何家成、汪洋何培祥特等奖2 121 自走式蔬菜穴盘苗全自动移栽机江苏大学徐飞、徐静云、顾俊、张晨迪、杨丽红毛罕平、胡建平特等奖3 205 田间视觉对靶变量喷雾植保装备浙江大学张利君、刘光远、施玮囡、王乐、蒋卓华蒋焕煜特等奖4 162 谷种的自动整列与智能分选设备东北农业大学王洪飞、奚德君、张天宇、杨苏飞权龙哲特等奖5 133 小型圆捆机草捆捆扎与卸捆的自动操纵与报警装置江苏大学吴启斌、陈永河、王新新尹建军特等奖6 211 用于设施农业中的路径识别导航系统华南农业大学庄晓霖、陈辉、郭记磊、杨汶泊、董义奎张铁民一等奖7 167 智能调控宽幅等深播种装置山东理工大学程修沛、夏芝贤、杜冉、黄宗睿智、连德建李其昀、彭丽芳一等奖8 143 基于BLE技术的肉牛健康在线监测系统沈阳农业大学于丰华、周雅婷、姜美曦、余昌乐陈春玲一等奖9 195 iAgri智能喷洒机器人佳木斯大学朱光强、孟庆祥、梅杰、田野、杜锦灿姜永成一等奖10 123 一种农机具耕深实时监测系统吉林大学李杨、郭明卓、余海波、张哲齐江涛一等奖11 176 一种智能化的水稻精量排种装置华南农业大学王宝龙、张明华、邢赫、黄逸春、姚钊泓王在满、可欣荣一等奖12 212 基于FPV的无人驾驶气力式变量施肥机华南农业大学齐兴源、杨程、陈婷婷周志艳一等奖13 135 自动控制码垛机河南农业大学毋高峰、李智广、张子祥、吕凤朝李保谦一等奖14 147 智能化母猪分娩检测系统南京农业大学刘佳磊、许佩全、陈鑫、陶源栋沈明霞、刘龙申一等奖15 178 智能化设施多功能育苗机山东农业大学刘中正、吴彦强、林立恒侯加林、邵园园一等奖16 193 基于单片机的高精度土壤贯穿阻力测试装置东北农业大学李义德、刘镇业、张宝鹏、邵艳龙王德福一等奖17 160 玉米播种机播种单体红外线液压仿形装置黑龙江八一农垦大学张博、刘伟达、廉琦、王海洋、浦兰娟张伟一等奖18 201 面向生物防治的智能投放装置江苏大学童翔、张杰、郝雪枫、蔡彦伦、顾艳辉管贤平一等奖19 154 基于物联网的农产品溯源检测山东理工大学焦艳翠、席志刚、张慧、高磊、刘继国孙霞一等奖20 174 缓坡地预切种式菌草种植机福建农林大学林长山、谢大涛、吴思杰、邓家锦、赖延锋郑书河一等奖21 138 循环风幕式半导体制冷果蔬展示柜华南农业大学赵俊宏、丘广俊、杨径、张震邦、李斌吕恩利、张秀丽二等奖22 217 田间土壤物理性质远程检测装置昆明理工大学李婕、贾维兵、徐曼、徐天宇、伍进波杨启良二等奖23 184 面向通用拖拉机的遥操作驾驶机器人南京农业大学陈浩、张月伟、赵亚玲、梁龙、陈益杉卢伟、王玲二等奖24 188 一种新型遥控电驱动可调地隙农田管理机的研制中国农业大学于斌、朱大友、欧阳熙、黄文思、毕瑞芳赵建柱、张云文二等奖25 130 电动自走清扫式落地红枣收获机塔里木大学鲁兵、牛瑞坤、李大伟、刘鹏、张攀峰胡灿二等奖26 210 基于无线传感器网络(WSN)的荔枝园智能微灌监控系统华南农业大学余国雄、林进彬、黄亮健、陈文达、欧剑港王卫星、谢家兴二等奖27 183 立铣式破冰除雪机设计佳木斯大学庄腾飞、邱新伟、王锐、庞秀岩李亚芹、王俊发二等奖28 189 智能化甘蔗中耕施肥培土机黑龙江八一农垦大学张婷、李海亮、孙海天、严晓丽汪春二等奖29 140 振动式智能挖藕机重庆理工大学陈亚洁、卢腊、余俊伟、陶涛刘妤二等奖30 177 播种机智能排种电力驱动系统昆明理工大学邢金龙、胡子武、马文鹏、张道义、李家诚赖庆辉二等奖31 219 智能移载机器人江苏大学刘晓凯、包盛、靳合琦、周颖鸿、钱陆亦魏新华、胡建平二等奖32 202 基于文丘里施肥器的水肥一体化智能灌溉施肥机江苏大学刘思晗、吴家辉、周兴勇、朱嘉炜、庞庆龙蒋小平、高菊玲二等奖33 137 智能山地果园运输机动力主动控制及自动停泊系统华南农业大学陈满波、李志鹏、黄崇霖、游展辉、余耀烽吴伟斌二等奖34 199 基于纸质微流控芯片的便携式自动农药残留检测系统研制江苏大学李振、叶洋滔、项昌华、薛春阳、沈凯杨宁二等奖35 144 夏秋绿茶加工过程在线智能监测系统江苏大学张东亮、张彬、孙翠翠、黄琪评、孙浩陈全胜二等奖36 124 一种用于山区农业耕作的智能一体机江苏大学熊志翔、吴晨、石洋、尹江南、程俊骆寅二等奖37 156 基于超声波检测的苜蓿智能补播机中国农业大学王文辉、程晨、白慧娟张淑敏二等奖38 170 智能小麦旋耕施肥精播复式装备山东农业大学曹瑶瑶、李培建、夏参政、陈耐超、张增辉丁筱玲二等奖39 150 小麦籽粒硬度的高光谱图像无损检测系统华北水利水电大学母建茹、阮朋举、李光普、何刚张红涛二等奖40 159 玉米钵盘育秧播种机黑龙江八一农垦大学刘鑫、候永瑞、樊琦、何冯光、王颖倩张伟二等奖41 196 木耳养菌物联网控制系统佳木斯大学孟庆祥、朱光强、周环、王慧斌、杨阳姜永成二等奖42 142 智能低温真空远红外干燥机黑龙江八一农垦大学王鑫、青苡任、杨彬、刁显琪、唐婧二等奖43 179 果园与温室大棚小型多功能遥控作业机山东农业大学冯海明、太健健、杨庆璐、王永振范国强、张晓辉二等奖44 186 农机CAN数据采集传输系统黑龙江八一农垦大学刘传茂、王少农、吉辉利、于志成、刘洪利王熙二等奖45 216 基于单片机短信模块远程控制系统云南农业大学宋时雨、杨昊霖、薛翔、国攀、杨振杰余杨二等奖46 158 铺膜机自动压膜和割断装置山西农业大学张肖敏、郎璐婷郑德聪二等奖47 191 基于微机电与物联网技术的土壤应力场测试分析系统东北农业大学于友朋、李向阳、马超、丁娃刘立意二等奖48 197 微生物肥菌培养条件优化控制微全分析系统江苏大学左志强、何晓婷、晏盘龙、陶欣怡、张元霞毛罕平、杨宁二等奖49 148 食品重量智能分级装备山东农业大学徐京京、吴玉红、张继前、王一峰、朱慧超赵立新二等奖50 172 便携式智能蔬菜穴盘播种机浙江大学季明东、李冬冬、陆元超、郑小伟李建平二等奖51 153 云南三七主根称重分级装置昆明理工大学宋瑞凯、李淑国、杨青丰、赵建平、陈广张付杰二等奖52 125 一种面向农业耕作设备的新型智能激光再制造跟随装置福建农林大学张宁、徐航煌、陈堂、龚健枫、潘仟仟陈学永二等奖53 213 遥控田间搬运机重庆理工大学李扬、杨鸿、吴珍杨岩二等奖“东方红”第一届全国大学生智能农业装备创新大赛B类获奖作品名单(特等、一等、二等奖)序号作品编号高校名称作品名称团队成员指导教师名次1 16 江苏大学田间行走机器人宋牧春、张宇伟、印汉铭沈跃特等奖2 9 江苏大学田间行走机器人段永辉、何思伟、张礼帅、王腾光、冷亭玉沈跃特等奖3 49 西南大学农业田间行走机器人郭春江、王宇、杜相龙丁珠玉、刘代祥特等奖4 10 江苏大学田间行走机器人胡建冬、张华、柳津川沈跃特等奖5 67 重庆理工大学农业田间行走机器人滕举元、李林峻、毛方东、李扬杨长辉一等奖6 48 西南大学农业田间行走机器人郑远、杨继东、张广林丁珠玉、樊利一等奖7 74 江苏大学田间行走机器人游维德、龙友能、赵渊蕊秦云一等奖8 55 江苏大学田间行走机器人沈峥楠、张龙飞、李文瑶、朱畏畏、李臣旭江浩斌一等奖9 66 西南大学农业田间行走机器人王林凤、邓莹、孙亚平、蒋光兵、冉嘉蒋猛一等奖10 47 西南大学智能田间行走机器人赵蔺、廖小宇、毕继超、蒋瑞、张鉴张建军一等奖11 72 江苏大学田间行走机器人程垲涛、余治国、刘勇峰秦云一等奖12 40 华中农业大学田间行走机器人王丰圆、柯学、郑岳智、姚鹏娇、崔志鹏宗望远、徐胜勇一等奖13 41 华南农业大学征服者林宏亮、欧阳健燊、刘贻海、蔡智力、陈锦富贾瑞昌一等奖14 21 南京农业大学田间行走机器人肖宏伟、梁龙、水恒琪、李波、杨洋卢伟、冯学斌一等奖15 64 华南农业大学铁牛坦克庄晓霖、杨汶泊、李晟华、郭记磊、董义奎张铁民一等奖16 73 江苏大学田间行走机器人叶洋滔、司响、姚甜、顾容榕沈跃二等奖17 45 华南农业大学GA小车温锐坚、邱汉、梁敏健、叶嘉文、李晓燊钟强二等奖18 44 华南农业大学蝙蝠侠倪俊文、张宗浩、赵江东、周巳圣、潘宇捷张永博二等奖19 1 中国农业大学“探测鼠”田间自主导航机器人何泽文、徐雨舟、杨小庆、朱凯谭彧二等奖20 51 东北农业大学智能田间行走机器人范成国、张心翮、李一鑫、李纯锋、房建瓴张喜海二等奖21 4 内蒙古农业大学田间行走机器人赵晓东、张佳明、王海庆、李星贤、郭家兴李海军、崔红梅二等奖22 52 江苏大学Skyfire 苏光灿、杨月星、魏轶凡、罗莉君、王雨轩董晓娅二等奖23 62 福建农林大学农业田间避障行走机器人冯荣华、康伟强、谢艺鑫、王云城、李玲叶大鹏二等奖24 63 福建农林大学农业田间避障行走机器人刘世鹏、陈晓东、严翔、郑少萍、林良煌方兵二等奖25 23 南京农业大学田间行走机器人郭阳鸣、张琳、杜晓月、刘子璇刘龙申、田光兆二等奖26 53 江苏大学田间行走机器人蒋斌、宋俊伟、沈雪金、骆佳明、梅晋银魏新华二等奖27 54 江苏大学行走小车贺坤、杜金财、汲峥、姚香平、王鹏尹建军二等奖28 77 江苏大学田间行走机器人许鸿伟、陶飞、周雨楠、刘阳光、高福强路欣、王红、朱晶璇二等奖29 15 江苏大学行走小车石丽娟、吴玉丹、易蓬凭、孙田田、王雯王新忠二等奖30 27 山东理工大学田间行走机器人张兴鹏、耿丽杰、李超、张昌超、张世凯苏新勇二等奖31 11 江苏大学田间行走机器人纪友州、徐舒其、章少岑秦云二等奖32 68 云南农业大学农业田间行走机器人朱加繁、周桥、陈婷、张骥弟、曾敏赵玉清二等奖33 25 南京农业大学田间行走机器人顾存昕、胡海阳、张佳菲、徐茜吕成绪、李林二等奖34 56 南京林业大学“冲锋号”智能避障小车潘四普、易善南、崔亚飞、束义平、封帆陈青二等奖35 37 浙江大学农业田间行走机器人张伟阳、华诗佳、王艾伦、陆湛、孙明琦俞永华二等奖36 59 浙江大学农业田间行走机器人朱姜蓬、刘光远、张之远、章禾嘉、李佳婷蒋焕煜二等奖37 65 华南农业大学超声波田间行走机器人陈满波、李志鹏、黄崇霖、游展辉、余耀烽吴伟斌二等奖“东方红”第一届全国大学生智能农业装备创新大赛优秀奖名单高校名称作品名称团队成员所属领域作品层次指导教师中国农业大学基于超声波导航的田间行走机器人梁盛好、陈振海、黄锦涛、郭缘 B 本科生谭彧中国农业大学“天猪”田间行走机器人窦文豪、文伟松、王勃蒙 B 本科生谭彧山西农业大学智能避障小车吴振宇、史森文、陈建功、刘亚飞、刘晓峰 B 本科生郝称意、吴锴黑龙江八一农垦大学田间行走机器人纪帅、尚吉星、肖跃进、尹义志、林学志 B 本科生张福军东北农业大学农业田间行走机器人韩宗昌、宋少航、张伟、李平安、孟祥远 B 本科生刘立意沈阳农业大学田间行走机器人王峻、张闰琦、杨楠、杨禹 B 本科生白晓虎江苏大学田间行走机器人王洪涛、张宏、杨挺、范勤晗、季贤 B 本科生路欣江苏大学田间越野车李烨、陈培盛、张铭、庞朝杰 B 本科生杨启志、石强南京农业大学田间行走机器人马鹏、古炜豪、薛荣亮、甘辉、张迁 B 本科生吕成绪、李玉民南京农业大学田间行走机器人丁婧、闫思蒙、陈青、谢华滋、陈益杉 B 本科生张祎、张瑜南京农业大学田间行走机器人李蕊、杨杰、高丙、熊权丰 B 本科生张澄宇、李询南京农业大学田间行走机器人鲁彤、谯佩雯、龚金凤、朱城城、符翔 B 本科生孙玉文、钱燕南京农业大学田间行走机器人黄尔齐、梁芯瑜、李奇生、朱贺详、赵卓然 B 本科生卢伟、孙国祥山东理工大学基于导航数据的田间行走机器人杨腾祥、刘汉斌、万古阳、贾真、刘培伟 B 本科生印祥山东理工大学田间机器人李金浩、林凯、崔志超、路云、孙伟 B 本科生印祥山东理工大学牧马人赵亮、陈超、王景华、杜炳呈 B 本科生宫金良山东农业大学采集监控巡逻车王公成、彭世刚、张同星、成杰、王复涛 B 本科生刘平安徽农业大学智能田间行走机器人余茂鑫、俞志伟、罗磊、荀元武、邓茜 B 本科生孙磊浙江大学农业田间行走机器人吴文华、虞烨凯、赵欣宇、朱璐艺 B 本科生俞永华浙江大学农业田间行走机器人麻志宏、祁晓璐、庞铭杰、柴巧会、吕腾浩 B 本科生俞永华浙江大学农业田间行走机器人陈海、赵志林、洪后阳、赵京城 B 本科生俞永华浙江大学田间行走爱心车项丽蓉、黄恩待、金洛熠、徐潇越 B 本科生叶尊忠浙江大学农业田间行走机器人郭晗、马方丹、何娅妮、张羚玥 B 本科生俞永华河南科技大学农业田间行走机器人陈凯康、冀福华、白俊超、秦旭飞、李婷婷 B 本科生庞靖华中农业大学基于51单片机的超声波避障田间行走机器人上官希坤、甘素亭、岑建何、刘波 B 本科生介邓飞华南农业大学基于51单片机的田间机器人彭章、曹海盛、石颖、苏敬江、陈景豪 B 本科生魏德仙华南农业大学田间行走机器人李嘉晋、雷会深、颜镇城、欧阳全杰、林远平 B 本科生黄世醒华南农业大学二轮自平衡田间行走机器人凌晓斌、林晓锋、沈佳伟、孙艳美、吴健波 B 本科生张增学南京林业大学农业田间行走机器人焦祥、胡汉春、唐雨生、朱正阳、朱鹏 B 研究生张慧春山东农业大学农业田间行走机器人荣楠楠、孟相君、朱洋艳、张建浩、李杰 B 研究生王冉冉福建农林大学农业田间行走机器人练开明、索义弘、赖富鹏、邱荣斌 B 研究生董楸煌华北水利水电大学华水电力团队田间行走机器人宋方略、索宏伟、董杨、王亚龙、魏媛媛 B 研究生楚清河、谭联云南农业大学农业田间行走机器人杨陆强、蒋世雨、彭文、高志超 B 研究生杨彦鑫云南农业大学农业田间行走智能小车肖鹏、王春尧、朱瑜、邢志忠、郭小军 B 研究生张艳诚、张海东云南农业大学农业田间行走机器人肖勇、王强、张国帅、傅延祺 B 研究生施杰河北科技师范学院基于双CAN总线的农用环境参数测控仪的设计陈泽宇、郭伟东 A 本科生马玉泉、刘佳山西农业大学小型割草机屠俊、苗政、杨佳敏、范佳斐、李谦 A 本科生张静山西农业大学手推式绿化带修剪机杨炜华、程兰月、董慧丽、陈欣、刘彦宏 A 本科生张秀全山西农业大学红枣采摘器白世杰、兰昌洲、李俊雄、薛温馨 A 本科生王七斤山西农业大学核桃采收机的设计尚哲敏、杨琦、杨三叶、王晔、马佳豪 A 本科生胡娟黑龙江八一农垦大学远程土壤墒情监测系统张鸿翔、宋国超、张鹏、李海、徐宝聪 A 本科生张福军黑龙江八一农垦大学双腔勺轮式排种器的设计刘猛、于博群、杜宇、李宇飞 A 本科生胡军东北农业大学基于植物工厂化的立体式智能育秧管理机器人的实践研究沈柳杨、彭涛、安思雨、季忠良 A 本科生权龙哲东北农业大学螺旋式智能谷物收集装袋机孙迪迪、王腾、孟令新、杨丹丹、邹杰鑫 A 本科生张影微佳木斯大学基于仿生学原理水下机器鱼设计张治环、苟马龙、陆仕波 A 本科生张金波佳木斯大学具有越障功能智能化水稻秧苗运输机李佳航、苑孟吉、宋彦峰、张英宝 A 本科生张金波佳木斯大学智能型循迹避障田间行走机器人李欣雨、崔磊、马雪建、张亚洲、周海洋 A 本科生葛宜元、杨传华吉林大学复杂农田环境可视化信息采集移动平台牛欢、闫宏伟、金浩、王爽 A 本科生齐江涛沈阳农业大学自动跟踪式太阳能烘干机焦晋康、张海岩、丁海、李旭龙、呼永廷 A 本科生宋玉秋、张本华沈阳农业大学苹果自动分级计数机张超、孙强、李姚、吕游、杨学民 A 本科生冯龙龙、张本华沈阳农业大学农业机械集成演示装置高强、马思旋、郭宗奎、杨洋 A 本科生辛明金沈阳农业大学自动调光温室大棚王家宁、吴锡鹏、陶林、段挺、张国冲 A 本科生张本华、冯龙龙江苏大学田垄数据采集与果实采摘球形机器人胡方圆、宋牧春、杨厚丽、张宇伟、沈泽武 A 本科生沈跃江苏大学基于Android平台的常见农作物病虫害智能检测系统王馨潼、王鹏、汪伟、叶昊、惠开发 A 本科生成科扬山东理工大学高速公路绿化带轨道型智能化管理平台蔡目辉、朱珂栋、陈仁庆、杨腾祥、张世凯 A 本科生韩鑫。
首届杯全国大学生智能农业装备创新大赛智能农业装备田间行走机器人大赛规则【模板】
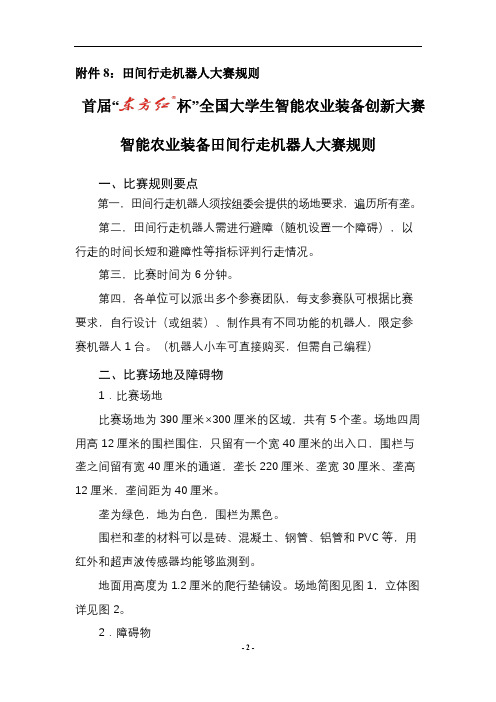
附件8:田间行走机器人大赛规则首届“杯”全国大学生智能农业装备创新大赛智能农业装备田间行走机器人大赛规则一、比赛规则要点第一,田间行走机器人须按组委会提供的场地要求,遍历所有垄。
第二,田间行走机器人需进行避障(随机设置一个障碍),以行走的时间长短和避障性等指标评判行走情况。
第三,比赛时间为6分钟。
第四,各单位可以派出多个参赛团队,每支参赛队可根据比赛要求,自行设计(或组装)、制作具有不同功能的机器人,限定参赛机器人1台。
(机器人小车可直接购买,但需自己编程)二、比赛场地及障碍物1.比赛场地比赛场地为390厘米×300厘米的区域,共有5个垄。
场地四周用高12厘米的围栏围住,只留有一个宽40厘米的出入口,围栏与垄之间留有宽40厘米的通道,垄长220厘米、垄宽30厘米、垄高12厘米,垄间距为40厘米。
垄为绿色,地为白色,围栏为黑色。
围栏和垄的材料可以是砖、混凝土、钢管、铝管和PVC等,用红外和超声波传感器均能够监测到。
地面用高度为1.2厘米的爬行垫铺设。
场地简图见图1,立体图详见图2。
2.障碍物障碍物的高度为12厘米,宽度为30厘米,颜色为黄色,材质为铁块(也可能为砖、混凝土、铝管和PVC)。
机器人启动位置固定。
仅在场地左右两侧通道的垄端位置设定一处障碍,位置不固定,比赛前公布确定位置。
且对所有选手位置都不再改变。
(比赛前,所有赛车放到裁判指定位置集中等待,不再允许修改程序。
)图1比赛场地简图图2 场地立体图三、机器人1.自动机器人每支参赛队参赛机器人仅为1台自动机器人(可以有多台,但只能1台参赛)。
2.能源(1)比赛期间各队应为自己的机器人准备能源;(2)自动机器人的电源电压必须低于24VDC;(3)允许使用压缩空气,但压力不得超过0.8MPa,每台机器人上的气瓶容积不得超过2500ml;(4)不允许使用组委会认为危险和不适当的能源。
3.大小及重量(1)所有机器人不限定大小;(2)所有机器人不限定重量。
乡村振兴战略背景下农业智能装备工程专业人才培养策略
安徽农学通报2023年14期农业教育基金项目2022年度辽宁省普通高等教育本科教学改革研究优质教学资源建设与共享项目(216);2022年度大连海洋大学本科教学改革研究项目;2021年大连海洋大学“课程思政”建设项目“质量管理与标准化工程”。
作者简介慕光宇(1982—),女,博士,副教授,从事农业智能装备教学和科学研究。
收稿日期2023-06-26乡村振兴战略背景下农业智能装备工程专业人才培养策略慕光宇潘澜澜吴鸣宇(大连海洋大学机械与动力工程学院,辽宁大连116023)摘要农业智能装备工程专业是农业工程、农业机械化及自动化与新一代信息技术深度融合的新兴专业。
作为农业现代化服务的工科类专业,致力于培养具有“知农爱农兴农”情怀,且掌握农业工程、机械工程、自动控制科学与工程等交叉学科知识的高素质创新型农业科技人才,为助力乡村振兴和农机行业的可持续发展提供人才保障和智力支撑。
本文在分析了农业智能装备人才培养核心要素的基础上,提出了构建多学科交叉融合式课程体系、建立虚拟实体相结合的农业智能装备创新实践体系、校企合作推动科创竞赛等人才培养策略,为工科涉农类专业人才建设提供一定的思路。
关键词农业智能装备;农业科技人才;培养策略中图分类号G642;S22-4文献标识码A文章编号1007-7731(2023)14-0153-04Research on talent cultivation strategy of agricultural intelligent equipment engineering under the background of rural revitalization strategyMU Guangyu PAN Lanlan WU Mingyu(School of Mechanical and Power Engineering,Dalian Ocean University,Dalian 116023,China )Abstract The specialty of agricultural intelligent equipment engineering is an emerging specialty that deeply integrates agricultural engineering,agricultural mechanization and automation with the new generation of information technology.As an engineering major in agricultural modernization services,it is committed to cultivating high-quality innovative agricultural science and technology talents with the sentiment of "knowing,loving,and prospering agriculture",and mastering interdisciplinary knowledge of agricultural engineering,mechanical engineering,automatic control science,and engineering.This major can provide talent protection and intellectual support for promoting rural revitalization and sustainable development of the agricultural machinery industry.On the basis of analyzing the core elements of cultivating agricultural intelligent equipment talents,this paper proposes talent cultivation strategies such as constructing a multidisciplinary and integrated curriculum system,establishing a virtual entity based agricultural intelligent equipment innovation practice system,and promoting scientific and technological innovation competitions through school-enterprise cooperation,providing certain ideas for the construction of engineering and agricultural related professionals.Keywords agricultural intelligent equipment;agricultural science and technology talents;cultivation strategy发展农业智能装备已经成为实现农业现代化的关键需求,亟需大批高素质的智能农业装备类人才。
首届“东方红”全国大学生智能农业装备创新大赛B类获奖情况汇总

超声波探测智能避障田间行走机器人
蔡志鸿,唐鹏,陈楚明陈小永,林世明
三等奖
田间行走机器人
杨海辉、曾广源、陈卓鸿、黄梓效
优秀奖
智能避障机器人VER1.0
陈东杨、陈秋彬、郭子汉、麦浩锋、罗晓威
优秀奖
基于STM32的农业田间行走机器人
曾英豪、汤超龙、龚敏豪、林志烽、邱汉
优秀奖
二轮自平衡田间行走机器人
凌晓斌、林晓锋、沈佳伟、孙艳美
优秀奖
首届“ 杯”全国大学生智能农业装备创新大赛B类获奖
作品名称
团队成员姓名
获奖等级征ຫໍສະໝຸດ 者林宏亮欧阳健燊刘贻海蔡智力陈锦富
一等奖
田间机器人
彭章,曹海盛,石颖,苏敬江,陈景豪
二等奖
田间行走机器人
李嘉晋雷会深颜镇城欧阳全杰林远平
三等奖
蝙蝠侠
倪俊文,张宗浩,赵江东,周巳圣,潘宇捷
三等奖
GA小车
温锐坚、梁敏健、叶嘉文、李晓燊、邱汉
智慧农业创新创业大赛计划书
智慧农业创新创业大赛计划书某某蔬菜有限责任公司”(简称xx公司)是一家关于农业产品集研发、生产、销售和服务为一体的高新技术企业。
公司拥有无线数据采集系统的核心技术,拼搏进取的创业团队及经验丰富的咨询顾问。
1.2市场描述我国是一个农业大国,人多地少,因此提高单位面积的作物产量是现阶段农业发展急需解决的问题。
而传统农业的模式已远不能适应农业可持续发展的需要,产品质量问题,资源严重不足且普遍浪费,环境污染,产品种类需求多样化等诸多问题使农业的发展陷入恶性循环,而智能农业为现代农业的发展提供了一条光明之路,智能农业与传统农业相比最大的特点是以高新技术和科学管理换取对资源的最大节约。
它是一项综合性很强的系统工程,是农业实现低耗、高效、优质、环保的根本途径,是世界农业发展的新趋势,也是我国农业迈向21世纪的最佳选择。
我国加入WTO对我国农业的影响和挑战逐渐呈现,面临的国际竞争非常激烈。
而且中国是世界第一蔬菜生产大国,随着蔬菜产业的飞速发展和“走出去”战略的实施,蔬菜出口数量急剧增长,出口市场继续扩大,蔬菜产业进口贸易的压力明显加大,出口贸易的壁垒日益增多。
国内而言,中国人口众多,蔬菜需求量自然也水涨船高。
随着蔬菜产业规模的缓慢增长,蔬菜种植技术的日益改善,蔬菜产量越来越大,品种日渐齐全。
已基本满足庞大的中国人口消费。
但蔬菜销售渠道有限,严重限制了蔬菜产业的发展。
1.3投资与财务公司设在某某市,公司成立初期共需资金200万元。
其中吸收客户投资50万元,发起人投资100万元,银行贷款50万元。
股本规模及结构暂定为:公司注册资本400万。
客户投资入股50万(20%);发起人投资100万元(50%);无形资产(技术入股)占(30%)。
第一年估计盈利30万人民。
智慧农业比赛作品创新大赛获奖作品
标题:智慧农业比赛作品创新大赛获奖作品第一部分:概述在当前社会中,农业产业正面临着一系列的挑战和机遇。
为了适应新时代的发展需求,智慧农业技术应运而生。
智慧农业以现代信息技术为支撑,注重生产、管理和服务的智能化,这不仅提高了农业生产效率和质量,还促进了农业产业的可持续发展。
为了更好地推动智慧农业技术的创新与发展,本次智慧农业比赛作品创新大赛迎来了众多优秀的作品,下面就让我们来看看其中的获奖作品吧。
第二部分:获奖作品介绍1. 作品名称:智能农业大棚系统这个作品通过引入大数据和人工智能技术,实现了对农业大棚内环境的实时监测和智能控制。
利用传感器收集环境数据,并将数据传输到云端,使用人工智能算法分析环境数据,并能够根据不同作物需求进行自动调控。
这样不仅提高了农作物的产量和质量,还节约了大量的水和能源资源。
2. 作品名称:农业机器人智能种植系统这个作品研发了一种能够实现智慧农业种植的机器人系统。
该系统能够根据农田的不同情况,自主选择最佳的种植方案,并能够自动完成种植的各项操作,包括翻地、施肥、浇水、除草等。
这一系统不仅减轻了农民的劳动强度,提高了种植效率,还可以减少对化肥和农药的使用,从而更加环保和可持续。
3. 作品名称:智能农业物联网系统这个作品采用了物联网技术,建立了一个涵盖了整个农业生产链的网络系统。
通过部署传感器和执行器,实现了对土壤、气象、作物生长情况等方方面面的监测和控制。
并结合了云端大数据技术,将农业生产实现了全面的智能化、信息化,为农业生产提供了全方位的支持。
第三部分:作品的意义及影响这些获奖作品的研发与应用,不仅提高了农业的生产效率和质量,还为农业生产注入了新的活力。
其在节约资源、增加产量、减少环境污染等方面的优势显而易见。
另外,这些智慧农业技术的应用,也使得农业生产更加科学化、精准化,为农民提供了更多的就业机会和增收途径。
可以说,这些作品的问世,将对农业产业产生深远的影响,推动着农业产业的蓬勃发展。
学科竞赛提升工科类大学生综合素质

工作研究
学科竞赛提升工科类大学生综合素质的实践研究
——以河南农业大学机电工程学院为例
吕志军,丁 力,祝英豪,何 勋,屈 哲,李 赫,王万章 (河南农业大学机电工程学院,河南郑州 450002)
摘要:为全面提升高校工科类大学生的培养质量,激 发学生投身学术科研的热情,营造良好的学术氛围, 培养学生独立解决问题的创新精神和实践能力,开展 学科竞赛是提高学生综合素质能力的有效途径之一, 同时促进更多教师参与本科生的竞赛指导,达到“以 赛促教、以赛促学、以赛促用、以赛促新”的目的。 以河南农业大学机电工程学院为例,梳理笔者指导本 科生参加多项全国大学生创新创业竞赛过程,总结创 新创业学科竞赛科研培养成果与经验,为高校本科教 育建设工作提供一定的借鉴。 关键词:学科竞赛;工科类学生;综合素质;能力培养
能检测缺苗系统分别进行设计与开发,其设计过程 如图1所示。其中本作品的控制部分是采用Arduino
(5)
软件对单片机进行编程,通过光电识别模块检测苗 盘中秧苗的存在情况,将数据传输至单片机,而后 联通至步进电机和直流推杆电机的动力系统,从而
式 中 , r2(i) 为 二 级 传 动 中 间 轮 B 节 曲 线 极 径 (mm);
在多次指导学生参加各项学科竞赛过程中,每一 次团队都有不同突破的原因在于团队合作,正所谓: “一花独放不是春,百花齐放春满园”,团队每年都 会有新鲜血液加入,这就需要一名有经验、有责任感 的学生作为队长,起到一个掌舵和导航的关键作用,
(a)栽植机构
(b)送秧机构 图2 关键部件建模与整机装配
Copyright©博看网. All Rights Reserved.
栽植臂秧针尖点B1的坐标为:
智慧农业校园方案策划活动

智慧农业校园方案策划活动一、背景介绍随着社会的发展和科技的进步,农业也正面临着新的变革和挑战。
智慧农业作为一种创新的农业生产模式,以人工智能、物联网等技术为支撑,将信息化、数字化与农业生产有机结合,为农业生产和农村发展提供了新的方向和动力。
在目前的教育环境中,如何将智慧农业的理念与校园实践相结合,培养学生的创新思维和实践能力,提高学生对农业问题的认知和解决能力,是一个迫切需要解决的问题。
二、目标通过智慧农业校园方案策划活动,旨在培养学生对农业问题的关注和兴趣,提高他们的实践能力和创新思维,推动智慧农业在校园中的实践应用,为农业发展提供新的思路和解决方案。
三、活动内容1. 增设智慧农业实验室和示范基地通过引进先进的农业技术、设备和传感器,建立智慧农业实验室,供师生开展科研和实践活动。
与农业企业合作,共同建设智慧农业示范基地,提供实际的农业生产场地和资源,供学生进行实地考察和实践操作。
2. 开展智慧农业科普讲座和培训班邀请农业专家和科研人员开展智慧农业科普讲座,介绍智慧农业的相关技术和应用案例,增加师生对智慧农业的了解和认知。
同时,组织智慧农业培训班,培养师生对智慧农业技术和操作的掌握能力,提高其在实践中的应用水平。
3. 开展智慧农业创新实践活动组织智慧农业创新实践活动,鼓励师生针对农业问题进行创新性的思考和实践。
可以通过创业比赛、创新项目等形式,鼓励学生团队开展智慧农业相关的研究和实践活动,提高他们的创新意识和实践能力。
4. 开展智慧农业教育推广活动开展智慧农业教育推广活动,以提高全校师生对智慧农业的认识和兴趣。
可以组织智慧农业游学活动,带领师生走进智慧农业企业和农田,亲身体验智慧农业的魅力。
此外,还可以开展智慧农业课程推广活动,推动智慧农业课程的开设和教材的编写,为学校的智慧农业教育奠定基础。
四、实施步骤1. 制定智慧农业校园方案策划活动的具体实施计划,明确活动的目标、内容、时间和责任人。
2. 开展智慧农业实验室和示范基地的建设工作,引进农业技术和设备,进行实验室和基地的改造和建设。
农业智能装备工程专业解析
农业智能装备工程专业解析一、农业智能装备工程专业是啥哎呀,小伙伴们,今天咱来唠唠农业智能装备工程这个专业。
这个专业啊,就像是给农业穿上了一身高科技的铠甲。
它主要就是研究怎么把智能技术用到农业装备上。
你想啊,以前种地那可都是靠人力,现在呢,有了这个专业,就可以让机器更聪明地干活啦。
比如说那些大型的收割机、播种机啥的,在这个专业的加持下,就可以变得超级智能。
它们可以根据土地的情况,自动调整播种的深度,还能根据农作物的生长情况,智能地决定什么时候施肥、浇水。
这可太酷了,就像给这些农业机械装上了大脑一样。
二、这个专业学些啥在这个专业里啊,那要学的东西可不少。
有机械工程方面的知识,像机械制图、机械设计这些。
你得知道怎么把那些机械零件设计得合理又耐用,就像搭积木一样,把各种零件组合成厉害的农业装备。
还有电子技术方面的知识呢。
毕竟是智能装备嘛,电子技术就像它们的神经。
电路原理、电子电路这些课程可都是基础。
要是不懂电子技术,那些智能的功能可就没法实现啦。
另外,计算机技术也是必不可少的。
要学会编程,让机器按照我们的想法去干活。
像编写程序来控制灌溉系统,根据土壤湿度自动浇水,这都得靠编程知识呢。
当然,农业方面的知识也不能少。
你得了解农作物的生长习性,知道不同的农作物需要什么样的环境,这样才能设计出适合它们的智能装备。
三、这个专业的就业前景说到就业前景啊,那可真是一片光明。
现在国家特别重视农业现代化,这个专业的人才那是供不应求。
可以去那些农业机械制造企业,参与设计和制造新型的智能农业装备。
说不定以后你设计的装备就会出现在广阔的农田里,那多有成就感啊。
也可以去一些农业科技公司,搞研发工作。
比如说研究怎么让无人机更精准地给农作物喷洒农药,或者开发新的智能灌溉系统。
还有啊,要是想继续深造,这个专业也有很大的发展空间。
可以读研究生,深入研究农业智能装备的某个方向,将来成为这个领域的专家呢。
四、这个专业的学习难度不过呢,这个专业的学习难度也不小。
大学生创新大赛:智能农业装备大比拼
旨在推进我国智能农业装备产业发展的首届“东方红杯”全国大学生智能农业装备创新大赛,12月22日在江苏大学举办。来自全国31所高校的500多名大学生参赛,一批智农业装备科研生产企业与大学生开展创新成果对接活动。 围绕“现代农装,创新科技”为主题,在为期两天的比赛中,参赛大学生分为科技发明制作类和田间行走自动机器人类两组开展角逐。科技发明制作类决赛由PPT汇报、作品现场展示及回答问题环节组成,重点考察参赛作品的可行性、创新性、科学性、先进性。田间行走自动机器人类作品则是每个团队有三次现场竞技机会,以最佳成绩作为最后结果。 据了解,承办此次会议的江苏大学农机特色鲜明,发挥“工中有农、以工支农”学科优势,打造以两个国家重点学科为引领,以农业机械、节水灌溉、农用动力、农业电气化、农业生物环境、农机先进材料、农机先进制造、农业生态环境为核心,以国家水泵及系统工程技术研究中心、国家级新农村发展研究院、现代农业装备与技术教育部重点实验室以及一批省部级重点实验室和工程中心为支撑的大农业工程学科群。近年来,江苏大学相继恢复了农业电气化与自动化本科专业以及农业机械化工程方向本科招生,先后成立了农业工程研究院、农产品加工工程研究院、生物质能源研究所等一批专职科研机构,并组建成立了农业装备工程学院,构建了较为完备的农业工程创新人才培养的组织构架。
东方红宣讲会——比赛规则讲解

往第届二大届(赛201(6):B果类园自)动对靶机器人
第一届:田间行走机器人
左右仅有一个不固定的障碍物
障碍物
从起点发车,遍历每 个垄道,走出即算成 功。挑战点在于图中 的障碍块,障碍块在 十个点随机取一个, 小车算法上要能识别 绕过障碍块,且不漏 掉垄道。
第二届:果园自动对靶机器人
关于华农校内选拔赛
1.在这两周内会将赛场布置好,赛场地点在工程北楼2楼 2.毛毯与播种板会与大赛组委会进一步联系之后布置,时 间暂定 3.校内选拔赛前十名可有国赛资格 4.第一轮比赛与国赛相同。晋级方式视具体情况而定。校 内最重要的仍是完成基础部分。 5.比赛时间在开学后第一个周末,建议暑假留校制作,赛 场不收
比赛场地
土棕色毛毯:随 机放置多处,放 置条数随机,以 模拟松软路面, 软毛长度
1.2cm~1.6cm
播种板
围栏高 12CM
一些Tips
单个播种结构 or两个?
注意车子的结构不能 超过围栏边界,会扣时间
一些Tips
国赛规则 第一轮比赛稳定性很重要
重要性由高到低 “走过的通道数”、“能否驶出场地”和“比赛用时”
第二、三轮比赛——有毛毯与播种板
要争取一等奖,特等
奖,播种机构要下功
重要性由高到低
夫
“播种得分数”、“能否驶出场地”和“比赛用时”
总结
整体上来讲 第一年,注重程序算法。 第二年,注重喷水的机构设计,同时车身底盘的负载能力 要比第一年的好(需要放水),还要考虑防水。 第三年,注重播种机构的设计,机构的设计需要发散思维, 难点也在播种结构,单个or双个播种结构,怎样播种?车 子可以不像第二年,携带很重的东西,但要注意软毛毯对 车子行走的影响。同时,算法也非常重要,小车经过播种 板时要平稳,避免种子掉落在播种范围之外。
大赛资格及形式审查实施细则
附件6:大赛资格及形式审查实施细则第二届全国大学生智能农业装备创新大赛资格及形式审查实施细则本实施细则依据《全国大学生智能农业装备创新大赛章程》,大赛组委会对参赛作品进行资格及形式审查时须参照本细则执行。
大赛组委会依据本细则判定被质疑和投诉作品的资格是否有效。
一、关于资格审查1.凡在举办大赛终审决赛的当年9月以前(含9月)正式注册的全日制非成人教育的各类高等院校(含社会力量举办的高等院校)的在校中国籍本科生和硕博研究生(均不含在职研究生)都可申报作品参赛。
2.参赛作品以团队形式申报。
团队作品除填写团队作品名称外,对于A类作品(自由选题,科技发明制作类)还要注明一位学历最高的作者为团队项目的代表,团队作者必须均为学生,均按学历最高的作者划分本科生作品、研究生作品。
B类(指定题目,果园自动对靶施药机器人竞技)作品允许本科生和研究生交叉组队,队长允许本科生担任。
C类(企业类题目)作品允许本科生和研究生交叉组队,队长允许本科生担任。
3.各高校选送参加大赛的A类作品总数不超过20件,B类作品不超过10件(承办高校可增加5件),C类作品不超过10件。
A、B、C类作品每位参赛学生各类限报1件。
- 1 -二、关于形式审查1.A类作品第一,作品均为科技发明制作类,参赛者自由选题,要求科技含量较高、对生产技术或社会生活带来便利的智能农业装备领域的发明、制作。
第二,发明、制作的展示形式为实物模型、产品、图片、录像、样机、软件等,对于尺寸和规格另行要求。
第三,大赛作品应为近2年(2014年10月~2016年10月)完成的成果,禁止直接运用导师成果、往年有关竞赛成果等直接参赛。
第四,对有关违背大赛成果要求、弄虚作假者的作品,一经核实,大赛委员会将参赛高校、参赛学院、指导教师以及参赛学生名单在大赛官方网站或大赛会议范围内予以通报,同时取消获奖作品资格、优秀指导教师资格和高校“优胜杯”资格;情节严重的将追究有关责任。
2.B类作品B类作品为果园自动对靶施药机器人竞技。
全国大学生人工智能与机器人创新作品(农业组)竞赛评审规则

附件1全国大学生人工智能与机器人创新作品(农业组)竞赛评审规则一、作品竞赛评审委员会组构成1.评审专家组成员由竞赛组委会聘请高校、企业、院所等相关领域的具有高级职称的若干自然科学领域的专家组成。
2.评审专家组设组长1名,成员6名,秘书1名。
3.评审专家组负责对参赛作品进行评审、设奖等系列工作。
4.评审专家组成员名单在终审完毕之前实行保密,在终审结束后可以公布。
5.评审专家组向评审领导小组报告终审结果后解散。
二、评审工作的基本原则1.评审过程中综合考虑作品的可行性、创新性、科学性及先进性等方面因素。
2.评审工作分初赛评审、半决赛评审、决赛评审三阶段进行。
(1)初赛评审阶段,针对A类、B类作品在形式和规范性审查无误后,评审出一定比例的作品进入半决赛评审。
(2)半决赛评审中,要求参赛者到现场答辩,分别评选出进入决赛的队伍;(3)在决赛评审中评出特、一、二、三等奖,各等次的获奖比例待定。
3.涉及需由有关部门出具证明材料的参赛作品,须按章程有关规定严格把关。
4.半决赛评审、决赛评审实行现场公开答辩并演示,师生可以亲临监督。
三、评审程序1.各高校要按照《关于举办2018全国大学生人工智能与机器人创新作品竟赛的通知》的规定,对报送的作品进行资格和形式审查。
2.竞赛组委会对各高校选送的参赛作品进行资格及形式审查,不合格的作品取消参赛资格。
3.竞赛评审专家组对参赛作品方案进行打分,分数的计算方法:在专家组成员打出的分数中去掉一个最高分和一个最低分,然后将其余分数进行平均。
最终由竞赛评审专家组根据各队分数就该队是否进入半决赛和决赛或者奖励等级拟出初步意见。
四、评分标准1.作品评分标准(初赛)竞赛评审专家组按照“公平、公正、公开、科学、规范”的原则进行评审。
评审内容包括资料审阅、现场答辩环节,对参赛作品的可行性、创新性、科学性与先进性等进行评分,满分100分。
可行性(30分,每项10分)①考虑该作品本身是否可行;②考虑该作品中技术操作的可行性分析是否到位;③考虑该作品在国内外较已有同类作品是否具有优势。
三创比赛项目介绍

三创比赛项目介绍项目背景近年来,创新创业活动在高校中越来越受到重视,大量的优秀创意和创业项目涌现出来。
为了促进创新和创业的发展,很多高校都举办三创比赛,为学生提供展示才华、交流经验和寻找合作伙伴的机会。
项目简介本文将介绍一项参加三创比赛的项目,以展示其创新性和商业潜力。
该项目名为“智慧农场管理系统”,旨在帮助农民实现农业生产的数字化管理和智能化决策。
项目目标该项目旨在提高农场管理的效率和农产品的品质,通过技术手段解决农业生产中的难题,并推动农业产业的可持续发展。
项目特点该项目具有以下几个特点:•数字化管理:通过使用传感器和物联网技术,该系统可以实时监测农田土壤和空气的温度、湿度,作物的生长情况等数据,为农民提供清晰的农场管理信息。
•智能化决策:基于大数据和人工智能算法,该系统可以分析历史数据和当前农场情况,并提供智能化决策的建议,如何合理安排灌溉、施肥等农业操作。
•用户友好界面:该系统具有直观、简洁的用户界面,农民可以方便地查看和管理农场信息,接收系统的报警和提醒,并与其他农民分享经验和建议。
项目应用该项目可以应用于各种规模的农场,无论是小型的家庭农场还是大型的农业企业,都可以通过使用该系统提高农业生产的效率和质量。
项目优势提升农业效益传统的农业管理方式依赖农民的经验和感觉,存在许多不确定性和浪费。
而智慧农场管理系统通过实时监测和智能化决策,可以帮助农民减少资源浪费、提高农产品的产量和品质,从而提升农业效益。
降低人力成本农业生产通常需要大量的人力投入,而使用智慧农场管理系统可以自动化和智能化许多繁琐的农业操作,减少对人工的依赖,从而降低人力成本。
促进可持续农业智慧农场管理系统可以通过合理管理资源和环境因素,促进可持续农业的发展。
通过精确控制水肥等农业要素的使用,可以减少对环境的污染,实现农业的可持续发展。
打造农业智能化形象农业智能化是当前农业发展的大趋势,使用智慧农场管理系统可以使农民的农业经营更加现代化、科技化,提升农业的形象和可持续发展的能力。
江苏大学农业装备工程学院

江苏大学农业装备工程学院
佚名
【期刊名称】《农业机械学报》
【年(卷),期】2016(47)3
【总页数】2页(PF0002-F0002)
【正文语种】中文
【中图分类】S
【相关文献】
1.广东现代农业装备创一流——访华南农业大学工程学院罗锡文教授 [J], 程杰
2.东风农机与江苏大学、沃得公司共建江苏省农业装备与智能化高技术研究重点实验室 [J], 王卫东;许国明
3.生而灿烂莫负年华——记江苏大学农业装备工程学院农业信息化研究所所长刘继展 [J], 刘玉杰[1];范佳乐[1]
4.江苏大学农业装备工程学院农业信息化研究所所长刘继展 [J],
5.“东方红”杯首届全国大学生智能农业装备创新大赛决赛在江苏大学隆重举行[J],
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
首届全国大学生智能农业装备创新大赛章程
第一章总则
第一条大学生智能农业装备创新大赛(以下简称大赛)举办目的在于通过大赛进一步激发广大同学热爱农业装备、学习农业装备科技、投身农业装备事业的积极性和主动性,大力提升大学生的工程创新能力和实践应用能力,为我国实现由农业装备大国向农业装备强国迈进提供人才支撑。
第二条大赛由中国农业机械学会、中国农业工程学会、教育部农业工程类专业教学指导委员会以及江苏省现代农业装备与技术协同创新中心主办,相关具有农业工程学科的高校承办,行业企业冠名支持。
第三条大赛原则上每两年举办1次,原则上申报时间为11月份,大赛终审决赛时间为12月份。
第二章组织机构及其职责
第四条大赛设立大赛名誉指导委员会、指导委员会、评审委员会和组织委员会。
第五条大赛名誉指导委员会和大赛指导委员会由中国农业机械学会、中国农业工程学会、教育部农业工程类专业教学指导委员会以及江苏省现代农业装备与技术协同创新中心四家主办单位聘请部分高校有关负责人与专家教授组成。
大赛名誉指导委员会不设立任何职务和架构。
大赛指导委员会设主任1名,副主任3~5名,秘书1名,聘期4年。
第六条大赛名誉指导委员会工作职责
1.对大赛举办提出宏观的建设性意见和建议。
2.对大赛章程和实施方案提出具体的指导意见。
第七条大赛指导委员会工作职责
1.审议大赛章程和大赛实施有关方案;
2.审议大赛评审委员会成员、评审规则、获奖比例;
3.讨论和确定大赛的承办单位;
4.负责涉及大赛组织、评审等其他重大问题。
第八条大赛评审委员会设主任1名,副主任2名,秘书长1名,秘书若干名。
主要工作职责是根据评审规则制定大赛的评审实施细则,对参赛作品进行评审、并确定获奖作品等级,负责处理大赛过程中的有关专业技术问题
第九条大赛组织委员会由承办单位有关人员组成。
设主任1名,副主任3~5名,下设若干工作组,设组长1名、副组长1~3名、成员若干名等。
具体组织形式由承办单位自定。
第十条大赛组织委员会工作职责
1.负责具体组织实施大赛的宣传发动、项目评审、开幕闭幕、作品展示、大赛文化活动组织等有关大赛的全过程事项。
2.负责大赛所需的经费。
经费的筹集、管理和使用必须符合国家相关的法律、法规及学校的相关财务制度。
第三章参赛资格和作品申报
第十一条参赛学校为教育部认可的普通高等院校。
参赛队员应为在大赛报名起始日前正式注册的全日制非成人教育的高等院校在校中国籍本科生和硕博研究生(不含在职研究生)。
第十二条以团队(3~5人)形式参加大赛。
竞赛分为A类(自由选题,科技发明制作)和B类(指定题目,田间行走机器人)两类。
A类分为本科生作品和研究生作品。
B类不限制学历层次。
第四章作品展示、出版和学术交流
第十三条参赛作品在现场展览或演示,供专家委员会评审和其它人员观摩。
第十四条大赛组委会在大赛期间,可以组织多种形式的学术交流活动,如:报告会、论坛、讲座、专家点评等,邀请有关新闻媒体前来观摩采访,加强对大赛活动的宣传。
第十五条大赛指导委员会拥有参赛作品实物模型、结集出版大赛获奖作品介绍及评委评语的使用权。
参赛作品可由作者自行取回,不取回者不退还。
第五章奖励
第十六条大赛设立学生比赛等级奖、优秀指导教师奖及优秀组织奖等奖项。
第十七条学生比赛等级奖励设特等奖、一等奖、二等奖、三等奖,各等次奖占进入终审决赛各类作品总数的比例待定。
第十八条单项奖由大赛评审委员会提出设立,报大赛指导委员会批准。
第十九条竞赛设若干优秀组织奖,由大赛组委会对大赛组织中表现突出的单位进行表彰。
第二十条高校优秀组织奖。
大赛组委会还将按照各单位累计分数,评审出终审决赛入围高校一定比例的高校为优秀组织奖。
按照特等奖记100分、一等奖记70分、二等奖记40分、三等奖记20分、入围奖记10分。
以各高校总分从高到低进行评判,如遇到总分相同,以特等奖的个数评判,以此类推。
第二十一条优秀指导教师奖。
对于获特等奖和一等奖作品的指导教师,颁发优秀指导教师奖。
第六章申诉
第二十二条通过复赛的作品,设置七天公示期。
若收到投诉或异议,由大赛组委会组织调查,并上报大赛指导委员会讨论。
经调查确认有违规行为的,则取消该作品参赛资格,并予以通报。
第三十三条通过终审决赛的获奖作品,保留十五天的质疑投诉期。
若收到投诉,由大赛组委会组织调查。
经调查,如确认该作品资格不符者,取消该作品获得的奖励,重新计算作者所在学校团体总分及名次,若该作品指导教师获得优秀指导教师或该作品推送学校获得优秀组织奖的,同时取消已获得的优秀指导教师和(或)优秀组织奖;并视情节轻重,给予所在学校取消承办权或参赛资格等处罚。
大赛组委会保护投诉人的合法权益。
第七章附则
第二十四条大赛承办单位寻求赞助和冠名,经大赛指导委员会审核后,方可实施。
第二十五条为了补充大赛所需经费,参加全国大赛作品的作者所在学校应交纳一定数额的参赛费(首届大赛免收会务费、食宿交通等费用自理)。
第二十六条大赛要提倡节约,体现节能减排精神。
第二十七条本章程未尽事宜,由大赛组委会负责解释。
第二十八条本章程自大赛指导委员会审议通过之日起生效,解释权归大赛指导委员会所有。