4800计算器计算程序编写
4800计算器程序
4800计算器程序(缓和曲线任意中、边桩)LBI 0:X:Y:{I}:{J}:A:R:U:N:{D}:{O}:Z:W:W=1=>GOTO 1:≠>GOTO 2←LBI 1:B=90L2÷(ΠRA):←C=√(((I-J)-(I-J)5÷(40R2A2))2+((I-J)3÷(6RA))2):Q=U+BN÷3:S=U+BN+Z:T=U+BN+Z+180:GOTO 3:←LBI 2:E=90(I-J)÷(ΠR):C=2R SinE:B=90A÷(ΠR):Q=U+(B+E)N:S=U+(B+2E)+Z:T=U+(B+2E)N+Z-180:GOTO 3: ←LBI 3:F“XA”=X+C CosQ▲G“YA”=Y+C SinQ▲H“XR”=F+D CosS▲H“YR”=G+D SinS▲H“XL”=F+O CosT▲H“YL”=G+O SinT▲GOTO 0←说明:X Y—-起算点坐标(计算缓和曲线部分输ZH点、计算圆曲线部分输HY点);I J---为计算桩号,I为大里程,J为小里程,保证(I-J)始终为正;A—-为缓和曲线长;R—-半径;U—-起始方位角(直缓点);D O—计算边中距;Z—-一般为90度;N—-判别曲线左右偏位,右转输+1、左转输-1;W---当W=1时,程序计算缓和曲线部分,当W=0时,程序计算原曲线部分;F“XA”、 G“YA”---计算桩号的中桩坐标;H“XR”、 H“YR”---计算前进方向(F“XA”、 G“YA”对应)的右边桩坐标,H“XL”、 H“YL”---计算前进方向(F“XA”、G“YA”对应)的左边桩坐标注意:在计算YH至HZ间坐标时,X Y应输入HZ点的坐标值,U为HZ点的方位角-180度,N也相应相反,这时计算的左右边桩与线路前进方向的左右边桩正好相反,计算时要注意取值。
4800计算器程序
CASIO4800坐标计算程序CASIO4800缓和曲线、圆曲线和直线段上的任意中、边桩坐标计算程序1、该程序适用于计算器 CASVO fx-4800P,可计算与线路中心成任意夹角的缓和曲线、圆曲线、直线段中、边桩坐标及切线方位角。
2、A?输入转角:左转为负,右转为正3、R?输入圆曲线半径4、LS?输入缓和曲线长度5、JD?输入交点桩号6、J?输入0程序计算中桩,输入1程序计算边桩7、N? E?输入交点X、Y坐标8、FW 待求点切线方位角9、当计算交角为60°时,则公式改为(U+60),(U-120)1 A:R:C“LS”:D“JD”2 P=C∧2/24/R-C∧4/2688/R∧33 Q=C/2-C∧3/240/R∧24 B=90C/兀/R5 T=(R+P)tan(AbsA/2)+Q◢6 W=(R+P)/cos(A/2)-R◢7 L=((AbsA)-2B)兀R/180+2C◢8 G=D-T◢9 H=G+C◢10 I=G+L/2◢11 K=G+L-C◢12 M=G+L◢13 N:E:F: J14 A<0=>S=-1:≠=>S=1⊿15 U=F+A/2+90S16 V=W+R17 B=N+VcosU18 O=E+VsinU19 Lbl 120 {Z}21 Z≤G=>L=T+G-Z22 V=F+18023 U=F24 Goto 2⊿25 Z≤H=>L=Z-G26 V=L-L∧5/(90R∧2C∧2)27 L=30L∧2S/(兀RC)28 P=F+18029 Q=F+L30 U“FW”=F+3L◢31 Goto 4⊿32 Z≤K=>L=F+A/2+90S+180+180(Z-I)S/R/兀33 U“FW”=L+90S◢34 Goto 5⊿35 Z≤M=>L=M-Z36 V=L-L∧5/(90R∧2C∧2)37 L=30SL∧2/(兀RC)38 P=F+A39 Q=F+A+180-L40 U=F-3L+A◢41 Goto4⊿42 Z>M=>L=Z-M+T43 U=F+A44 V=U45 Goto 246 Lbl 247 X=N+LcosV◢48 Y=E+LsinV◢49 Goto 6⊿50 Lbl 351 {W}52 P“XL”=X+Wcos(U-90) ◢53 Q“YL”=Y+Wsin(U-90) ◢54 P“XR”=X+Wcos(U+90)◢55 Q“YR”=Y+Wsin (U+90) ◢56 Goto 157 Lbl 458 X=N+TcosP+VcosQ◢59 Y=E+TsinP+VsinQ◢60 Goto 661 Lbl 562 X=B+R cosL◢63 Y=O+RsinL◢64 Goto 665 Lbl 666 J=1=> Goto 3⊿67 Goto 1。
卡西欧4800计算器程序

LY、RY:左侧或右侧点Y坐标
I:置镜点至左或右点距离
J:置镜点至左或右点方位角
CONT:输入0计算下一里程;输入1则从本程序第一步开始
QX1计算范围:
DK214+832.674~DK216+053.229
QX2计算范围:
DK215+707.196~DK217+253.771(反算)
LbI 5 ↙
H=1=〉Y= -1×Y△ U=B+X cosT-YsinT:V=C+XsinT+YcosT:↙
X=U▲
Y=V▲
PoL((X-M,Y-N)↙
I ▲
J<0=〉J=J+360△↙
J ▲
{W}:W“NEXT”:W=1=〉Goto 1△↙
LHale Waihona Puke I 6 ↙ {O}:O“O=”:O=1=〉Goto 7△↙
QX3计算范围:
DK216+623.229~DK219+480.262
QX4计算范围:
DK217+923.771~DK222+114.707(反算)
J ▲
F=T ▲
Goto 6 △↙
LbI 3 ↙
L>A=〉Goto 4 △ X=L-L5÷40÷(RA)2:Y=L3÷(6RA)-L7÷336÷(RA)3:Z=60×L2÷(πRA)+tan-1(Y÷X):H=1=〉Z= -1×Z △F=T+Z▲
Goto 5 △↙
LbI 4 ↙
Z=180(Abs(E-D)-A)÷(πR)+90A÷(πR):X=R sinZ+A÷2-A3÷(240R2):Y=R(1-cos Z)+A2÷(24R)-A4÷(2688R3):H=1=〉Z= -1×Z △ F=T+Z▲
CASiO fx-4800计算器程序

CASiO fx-4800计算器程序1、CE ZHANFix3:Prog"X":U=X:V=Y:Prog"X":X=X:Y=Y:Fixm:Pol(X-U,Y-V:Pause0:W=J:J<0=>J=J+360△IntJ+.01(.6Fr ac 60J+Int(60 FracJ:Fix 4:J"D,F"= Ans2、QU XIANFix3:L"K+"D"B÷2":Fixm:AbsD<3E 3=>Prog"Q":≠>X=L:Y=D △X:Pause0:Y"N,E="◢Pol ( X-U ,Y-V:Pause0: J <0=>J=J+360△IntJ+.01( .6 Frac 60J+Int(60 FracJ:Fix 4:J"D,FWJ"=Ans3、X{NXY}:N=控制点编号=>X=控制点X 坐标:Y=控制点Y 坐标△N=下个控制点编号=>X=下个控制点X 坐标:Y=下个控制点Y 坐标△……X:Pause0:Y4、QProg"SJ":Prog"P":C=L-H:C>.5B=>K=B-C:≠>K=C △K>0=>K≤S=>A=RS:X=K -K 5÷40A 2:Y=K 3÷6A -K 7÷336A 3:≠>A=180(K-S)÷πR+M:Y=R(1-cosA)+W:X=RsinA+Z [1△Pol(X,Y:≠>I=K:J=0△E-F>0=>C<.5B=>X=N+Rec(I,J+F:Y=J+Q:Prog"J":J=Ans+F:≠>J=-J:Prog"K":C=B-C:Prog"J":J=E-Ans:△≠>C<.5B=>J=-J:X=N+Rec(I,J+F:Y=J+Q:Prog"J":J=F- Ans: ≠>Prog"K":C=B-C:Prog"J":J=Ans+E: △△X=X+Rec(D,J+90:Y+J5、KX=P+Rec(I,J+180+E:Y=J+O6、JC≤0=>0: C≤S=>90C 2÷πA: ≠>A △△△7、PE=F-Z:G=H+B:W=S 2÷24R: Z [1]=S-S 3÷40R 2-Rsin(180S÷2πR:M =180S÷2πR :Rec (T,F-180:N=I+X:Q=J+Y: Rec (T,E:P=I:+X:O =Y+J8、SJL ≤缓直点桩号=>B=曲线长度:F=计算方位角:H=直缓点桩号:T=切线长度:X=交点X 坐标:Y=交点Y 坐标: S=缓和曲线长度:R=曲线半径:Z=转角(左转输正,右转输负):≠>L≤下段直缓点桩号=>B=曲线长度:F=计算方位角:H=直缓点桩号:T=切线长度:X=交点X 坐标:Y=交点Y 坐标: S=缓和曲线长度:R=曲线半径:Z=转角值: ≠>L≤下段直缓点桩号……△△△ (注:有多少弯道就加多少个△)。
4800、5800、工程计算器万能程序
48000直曲线计算器程序程序名ZCXP=L2 ÷(24 R)- L4÷(2688 R3)M=L÷2-L3÷(240R2)B=90L÷(πR)T=(R+P)×tan(AbsA ÷2)+MC“ZH”=D-TG“HY”=C+LH“YH”=G+(AbsA÷2-2B)×πR÷180I“HZ”=H+LLbi0:{K}K≤G=→Goto1:≠→Goto2⊿Lbi1:(K-C)≤0→Goto5⊿X=K-C-(K-C)5÷(40R2L2)Y=(K-C)3÷(6LR)-(K-C)7÷(336R3L3)J=√(X2+Y2)O=tan-1(Y÷X)Q=N+Tcos(F+180)+Jcos(AbsAO÷A+F):“X0=”:Q◢S=E+Tsin(F+180)+Jsin(AbsAO÷A+F):“Y0=”:S◢W=F+3AbsAO÷ALbi2:K≥H→Goto3⊿X=Rsin((K-G)×180÷(πR)+B)+MY=R(1-cos((K-G)×180÷(πR)+B))+PJ=√(X2+Y2)O=tan-1(Y÷X)Q=N+Tcos(F+180)+Jcos(AbsAO÷A+F):“X0=”:Q◢S=E+Tsin(F+180)+Jsin(AbsAO÷A+F):“Y0=”:S◢W=F+AbsAB÷A+AbsA(K-G)×180÷(πR)÷AGoto4⊿Lbi3:K≥I→Goto6⊿X=K-I-(K-I)5÷(40R2L2)Y=(I-K)3÷(6LR)-(I-K)7÷(336R3L3)J=√(X2+Y2)O=tan-1(Y÷X)Q=N+Tcos(F+A)+Jcos(F+A+180-AbsAO÷A):“X0=”:Q◢S=N+Tsin(F+A)+Jsin(F+A+180-AbsAO÷A):“Y0=”:S◢W=F+A-3AbsAO÷AGoto4⊿Lbi4:U=Q+Zcos(W-90):“XL=”:U◢V=S+Zsin(W-90):“YL=”:V◢U=Q+Zcos(W+90):“XR=”:U◢V=S+Zsin(W+90):“YL=”:V◢Goto0⊿Lbi5:Q=N+(D-K)cos(F+180):“X0=”:Q◢S=E+(D-K)sin(F+180):“Y0=”:S◢W=FGoto4⊿Lbi6:Q=N+(T+K-I)cos(F+A):“X0=”:Q◢S=E+(T+K-I)sin(F+A):“Y0=”:S◢W=F+AGoto4⊿“END”程序名JDXXXXA=XXXXX R=XXXXX F=XXXXX D=XXXXXL=XXXXX N=XXXXX E=XXXXX Prog“ZCX”◢程序中:K表示里程(変量) Z表示該里程處左右邊樁距中心垂距A表示曲綫轉角(左轉-,右轉+)R曲綫半徑58000直曲线计算器程序程序名ZCXL2 ÷(24 R)- L4÷(2688 R3)→PL÷2-L3÷(240R2) →MB=90L÷(πR)→BT=(R+P)×tan(Abs(A) ÷2)+M→TD-T→C:“ZH=”:C◢C+L→G:“HY=”:G◢G+(AbsA÷2-2B)×πR÷180→H:“YH=”:H◢H+L→I:“HZ=”:I◢Lbi0:?KIfK≤G:ThenGoto1:ElseK>G:Goto2:IfEndLbi1:(K-C)≤0⇒ Goto5K-C-(K-C)5÷(40R2L2)→X(K-C)3÷(6LR)-(K-C)7÷(336R3L3) →Y√(X2+Y2)→Jtan-1(Y÷X)→ON+Tcos(F+180)+Jcos(AbsAO÷A+F)→Q:“X0=”:Q◢E+Tsin(F+180)+Jsin(AbsAO÷A+F)→S:“Y0=”:S◢F+3AbsAO÷A→W◢Lbi2:K≥H≯Goto3Rsin((K-G)×180÷(πR)+B)+M→XR(1-cos((K-G)×180÷(πR)+B))+P→Y√(X2+Y2)→Jtan-1(Y÷X)→OQ=N+Tcos(F+180)+Jcos(AbsAO÷A+F)→Q:“X0=”:Q◢S=E+Tsin(F+180)+Jsin(AbsAO÷A+F)→S:“Y0=”:S◢W=F+AbsAB÷A+AbsA(K-G)×180÷(πR)÷A→WGoto4Lbi3:K≥I⇒+Goto6⊿K-I-(K-I)5÷(40R2L2)→X(I-K)3÷(6LR)-(I-K)7÷(336R3L3) →Y√(X2+Y2)→Jtan-1(Y÷X)→ON+Tcos(F+A)+Jcos(F+A+180-AbsAO÷A)→Q:“X0=”:Q◢N+Tsin(F+A)+Jsin(F+A+180-AbsAO÷A)→S:“Y0=”:S◢F+A-3AbsAO÷A→WGoto4Lbi4:Q+Zcos(W-90)→U:“XL=”:U◢S+Zsin(W-90)→V:“YL=”:V◢Q+Zcos(W+90)→U:“XR=”:U◢S+Zsin(W+90)→V:“YL=”:V◢Goto0Lbi5:N+(D-K)cos(F+180)→Q:“X0=”:Q◢E+(D-K)sin(F+180)→S:“Y0=”:S◢F→W◢Goto4Lbi:6N+(T+K-I)cos(F+A)→Q:“X0=”:Q◢E+(T+K-I)sin(F+A)→S:“Y0=”:S◢F+A→WGoto4⊿“END”程序名JDXXXXXXXXX→ A XXXXX→F XXXXX→R XXXXX→D XXXXX →N XXXXX→L XXXXX→E Prog“ZCX”◢程序中:K表示里程(変量) Z表示該里程處左右邊樁距中心垂距A表示曲綫轉角(左轉-,右轉+)R曲綫半徑L:缓和曲线长F:ZH-JD方位角D交点里程N交点X坐标 E交点Y坐标。
4800计算器程序编辑步骤2改

4800计算器程序编辑步骤2一、文件名QXFY(曲线放样主程序)W=1:{WQ}:W“LOAD”:W=-1=>A“ZJ”:B“R”:C“L0”:D“ZH KM”:E“JDX”:F“JDY”:G“A0”:H“1 R,-1 L”:⊿←{Q}:Q“OPP NAME”:Q=-1=>U“X0”:V“Y0”:≠>Prog“CON DAT”:U=4.444=>::⊿⊿←Lb1 1:{Z}:Z“DK+M”:Int (Z/1000)>0=>K=Int (Z/1000): ≠>Z=Z+1000K⊿←W≠-1=>Prog “CIR DAT”:A=9=>::⊿⊿←H≠-1=>H≠1=>::⊿⊿←M=Z-D:Prog “CENTER”←{L}:L“OUT L”:L>0=>{R}:R“OUT ANGLE”:X=X+Lcos(P+R):Y=Y+Lsin(P+R) ⊿L<0=>L=AbsL:{R}:R“OUT ANGLE1”:O=P+R:X=X+LcosO:Y=Y+LsinO:{LR}:L“OUT L2”:R“OUT ANGLE2”:L=AbsL:O=O+R +180:X=X+LcosO:Y=Y+LsinO⊿←PoI(X-U,Y-V)←“L=”:I◢( I“L=”◢)J<0=>J=J+360:⊿←“A=”:J→DMS◢(J“A=”◢)O=-1:{O}:O“VIEWXY”:O≠-1=>”X=”:X◢”Y=”:Y◢”P”:P→DMS◢⊿←(X◢Y◢P◢⊿←)Goto 1←二、文件名XY-AL(坐标反算){Q}:Q“OPP NAME” ←Q≠-1=>Prog“CON DAT”:U=4.444=>::⊿A=U:B=V: ≠>A“X0”:B“Y0”: ⊿I=0:J=0←Lb1 1:{Q}:Q“CPP NAME”:Q=-1=>{DC}:C“Xc”:D“Yc”: ≠>Prog“CON DAT”:U=4.444=>::⊿C=U:D=V: ⊿←Po1(C-A,D-B) ←“L=”:I◢(I “L=” ◢)J<0=>J=J+360⊿←“A=”:J→DMS◢(J“A=” ◢)Goto 1←三、文件名CAL XY(导线计算)O=2←Lb1 1:{O}:O“1:X0,Y0-A06个空格2:X0,Y0-XC,YC”:O≠1=>O ≠2=>Goto 1: ⊿⊿←I=0:J=0←{Q}:Q“OPP NAME”:O≠-1 Prog“CON DAT”: U=4.444=>::⊿A=U:B=V: ≠>A“X0”:B“Y0”: ⊿←O=1=>E“A0”: ≠>{Q}:Q“CPP NAME”:Q=-1=> C“Xc”:D“Yc”: ≠>Prog“CON DAT”:U=4.444=>::⊿C=U:D=V: ⊿Po1(C-A,D-B):E=J: ⊿←F=E:X=A:Y=B←Lb1 2:{ML}:M“LEFT ANGLE”:L“DISTANCE”:F=F+M:Rec(L ,F):X=X+I◢Y=Y+J◢F=F-180:Goto 2四、文件名CENTER(曲线放样子程序)S=ABπ/180+C:O=C2/24B:T=(B+O)tan(A/2)+C/2-C^3/240B2:N=-1:M>S-C=>M=S-M:N=1:⊿←M≤0=>X=M:Y=0:P=0: Goto 1: ⊿←M≤C=>X=M-M^5/40B2C2:Y=M^3/6BC-M^7/(336*B^3*C^3):P= 90M2/πBC:Goto 1: ⊿←M≤S-C=>P=180(M-C)/πB+90C/πB:X=BsinP+C/2-C^3/240 B2:Y=B(1-cosP)+O: ⊿Lb1 1:N=1=>P=A-P:I=X:J=Y:X=T+(T-I)cosA-JsinA:Y=(T-I)sinA+JcosA: ⊿←I=X:J=HY:X=E+Tcos(180+G)+IcosG-JsinG:Y=F+Tsin(180+G )+IsinG+JcosG:P=G+HP←五、文件名CIR DAT(曲线要素数据库)A=9:W≠1=> Goto 1⊿←Z≤曲线交点代号=>A=转向角:B=半径:C=缓和曲线长:D=直缓点里程:E=交点X坐标:F=交点Y坐标:G=切线方位角:H=右偏+1,左偏-1:Goto 1⊿←W=编辑顺序同上。
4800全套计算程序(吐血推荐)
4800全套计算程序(吐⾎推荐)整套卡西欧计算器CASIO FX-4800 4500测量程序各位同⾏:我长年从事公路桥梁测绘⼯作,收集整理了⼀整套卡西欧计算器CASIOFX-4800P和卡西欧CASIO FX-4500P测量放线程序,该套程序经过反复修正,具有极⾼的可靠性。
现在免费提供给⼤家.程序⽬录:1.1 测边⼤地四边形的条件平差程序1.2 测边中点多边形的条件平差程序1.3 单⼀导线的严密平差程序1.4 单⼀结点导线的严密平差程序1.5 边、⾓后⽅交会的条件平差程序1.6 测边交汇点的条件平差程序1.7 单⼀⽔准路线的平差程序1.8 单结点的平差程序1.9 多结点⽔准⽹的平差程序1.10 多边形⽔准⽹的平差程序1.11 三⾓⾼程差的计算程序1.12 测距边⽔平距离的计算程序1.13 ⾼斯投影座标正、反解和换带的计算程序1.14 平⾯座标转移的计算程序2.1 单边、⾓后⽅交会的计算程序2.2 双边、⾓后⽅交会的计算程序2.3 碎部点座标的计算程序2.4 内、外分点座标的计算程序2.5 房⾓标的计算程序2.6 多次后⽅测⾓交会点2.7 测边交会点的计算程序2.8 导线三维值的计算程序2.9 圆⼼座标和半径的程序2.10 测站点、照准点归⼼改正的计算程序2.11 单边、双站后⽅交会的计算程序3.1 线路中⼼座标的计算程序3.3 红线交点座标的计算程序3.4 直线与圆曲线交点座标的计算程序3.5 垂⾜座标的计算程序3.6 道路不等宽时曲线要素的计算程序3.7 缓和曲线敷设时的计算程序3.8 圆曲线敷设时的计算程序3.9 极座标放线线的计算程序3.10 交点座标的计算程序3.11 宗地有关项⽬的计算程序3.12 丘地有关项⽬的计算程序4.1 导线X、Y、Z值的近似平差程序4.2 ⽆定向导线的计算程序4.3 测⾓前⽅交会点座标的计算程序4.4 测边交会座标的计算程序4.5 测⾓后⽅交会点座标的计算程序4.6 双边、⾓后⽅交会点座标的计算程序4.7 平⾯座标转移的计算程序4.8 测站点、照准点归⼼改正的计算程序4.9 三⾓⾼程⾼差的计算程序4.10 测距边⽔平距离的计算程序4.11 单⼀导线的严密平差程序4.12 边、⾓后⽅交会点的严密平差程序4.13 测边交会点的严密平差程序5.1 图跟导线点座标的计算程序5.2 碎部点座标的计算程序5.3 内、外分点座标的计算程序5.4 ⾓座标的计算程序5.5 圆⼼座标的和半径的计算程序5.6 交点座标的计算程序5.7 单边、⾓交会点座标的计算程序5.8 宗地有关项⽬的计算程序5.9 单边、双站后⽅交会座标的计算程序6.1 线路边桩座标的计算程序6.3 直线与曲线交点座标的计算程序6.4 道路不等宽时曲线元素的计算程序6.5 垂⾜座标的计算程序6.6 圆曲线敷设的计算程序6.7 缓各曲线敷设的计算程序6.8 极座标放线的计算程序6.9 单⼀⽔准路线的近似平差计算程序6.10 丘地有关项⽬的计算程序公路中、边桩坐标计算及放样程序功能:任意半径曲线中桩、任意交⾓边桩坐标计算放样、中桩切线⽅位⾓、任意点置仪放样、两点间距离计算、两点⽅位⾓计算。
4800计算器程序计算例表
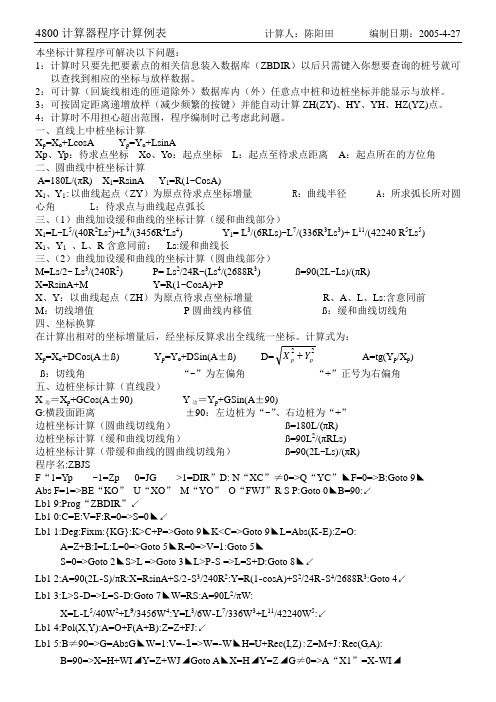
本坐标计算程序可解决以下问题:1:计算时只要先把要素点的相关信息装入数据库(ZBDIR )以后只需键入你想要查询的桩号就可以查找到相应的坐标与放样数据。
2:可计算(回旋线相连的匝道除外)数据库内(外)任意点中桩和边桩坐标并能显示与放样。
3:可按固定距离递增放样(减少频繁的按键)并能自动计算ZH(ZY)、HY 、YH 、HZ(YZ)点。
4:计算时不用担心超出范围,程序编制时己考虑此问题。
一、直线上中桩坐标计算X p =X o +LcosA Y p =Y o +LsinAXp 、Yp :待求点坐标 Xo 、Yo :起点坐标 L :起点至待求点距离 A :起点所在的方位角 二、圆曲线中桩坐标计算A=180L/(πR) X 1=RsinA Y 1=R(1-CosA)X 1、Y 1:以曲线起点(ZY )为原点待求点坐标增量 R :曲线半径 A :所求弧长所对圆心角 L :待求点与曲线起点弧长三、(1)曲线加设缓和曲线的坐标计算(缓和曲线部分)X 1=L -L 5/(40R 2Ls 2)+L 9/(3456R 4Ls 4) Y 1= L 3/(6RLs)-L 7/(336R 3Ls 3)+ L 11/(42240 R 5Ls 5) X 1、Y 1 、L 、R 含意同前: Ls:缓和曲线长三、(2)曲线加设缓和曲线的坐标计算(圆曲线部分)M=Ls/2- Ls 3/(240R 2) P= Ls 2/24R -(Ls 4/(2688R 3) ß=90(2L -Ls)/(πR) X=RsinA+M Y=R(1-CosA)+PX 、Y :以曲线起点(ZH )为原点待求点坐标增量 R 、A 、L 、Ls:含意同前 M :切线增值 P 圆曲线内移值 ß:缓和曲线切线角 四、坐标换算在计算出相对的坐标增量后,经坐标反算求出全线统一坐标。
计算式为:X p =X o +DCos(A ±ß) Y p =Y o +DSin(A ±ß) D=22p p Y X A=tg(Y p /X p ) ß:切线角 “-”为左偏角 “+”正号为右偏角 五、边桩坐标计算(直线段)X 边=X p +GCos(A ±90) Y 边=Y p +GSin(A ±90)G:横段面距离 ±90:左边桩为“-”、右边桩为“+” 边桩坐标计算(圆曲线切线角) ß=180L/(πR) 边桩坐标计算(缓和曲线切线角) ß=90L 2/(πRLs) 边桩坐标计算(带缓和曲线的圆曲线切线角) ß=90(2L -Ls)/(πR) 程序名:ZBJSF “1=Yp -1=Zp 0=JG >1=DIR ”D: N “XC ”≠0=>Q “YC ”◣F=0=>B:Goto 9◣ Abs F=1=>BE “KO ” U “XO ” M “YO ” O “FWJ ”R S P:Goto 0◣B=90:↙ Lb1 9:Prog “ZBDIR ”↙Lb1 0:C=E:V=F:R=0=>S=0◣↙Lb1 1:Deg:Fixm:{KG}:K>C+P=>Goto 9◣K<C=>Goto 9◣L=Abs(K -E):Z=O:A=Z+B:I=L:L=0=>Goto 5◣R=0=>V=1:Goto 5◣S=0=>Goto 2◣S>L =>Goto 3◣L>P -S =>L=S+D:Goto 8◣↙Lb1 2:A=90(2L -S)/πR:X=RsinA+S/2-S 3/240R 2:Y=R(1-cosA)+S 2/24R -S 4/2688R 3:Goto 4↙ Lb1 3:L>S -D=>L=S -D:Goto 7◣W=RS:A=90L 2/πW:X=L -L 5/40W 2+L 9/3456W 4:Y=L 3/6W -L 7/336W 3+L 11/42240W 5:↙ Lb1 4:Pol(X,Y):A=O+F(A+B):Z=Z+FJ:↙Lb1 5:B ≠90=>G=AbsG ◣W=1:V=-1=>W=-W ◣H=U+Rec(I,Z):Z=M+J :Rec(G ,A):B=90=>X=H+WI ◢Y=Z+WJ ◢Goto A ◣X=H ◢Y=Z ◢G ≠0=>A “X1”=X -WI ◢ Z “Y1”=Y -WJ ◢H “X2”=X+WI ◢W “Y2”=Y+WJ ◢◣↙Lb1A:N=0=>Goto 6◣Pol(X -N,Y -Q):J<0=>J=J+360◣J “FWJ=”◢I “JL=”◢B=90=>Goto 6◣G=0=>Goto 6◣Pol(A-N,Z-Q):J<0=>J=J+360◣J“FWJ1=”◢I“JL1=”◢Pol(H-N,W-Q):J<0=>J=J+360◣J“FWJ2=”◢I“JL2=”◢↙Lb1 6:D=0=>Goto 1◣L>P-D=>L=P-D◣↙Lb1 7:K≥E=>K=E+L+D:Goto 1◣L=L-D:L≤0=>L=0◣K=E-L:Goto 1↙Lb1 8:A=90(P-S)/πR:W=S/2-S3/240R2+tanA(R+S2/24R):Rec(W,O):O=O+2AF:U=U+I+WcosO:M=M+J+WsinO:F=-F:E=E+P:O=O+180:K<C+S=>L=L-2D:E=C◣Goto 6程序名: ZBDIRLb1 0:{K}:E=E1:K<E1=>K=E1: Goto 0◣↙K≤E2=>U=U1:M=Y1:O=O1:R=R1:S=S1:P=P1:F=±1:Goto 1◣↙K≤E3=>E=E2:U=U2:M=Y2:O=O2:R=R2:S=S2:P=P2:F=±1:Goto 1◣↙K≤E n+1=>E=E n:U=U n:M=Y n:O=O n:R=R n:S=S n:P=P n:F=±1:Goto 1◣↙K=E n+1 :Goto 0↙Lb1 1:注:F=1为右偏曲线F=-1为左偏曲线D:逐桩间距N“XC”Q“YC”测站XY坐标B:构造物与主线交角O:线路方位角R:半径S:缓和曲线长P:直(曲)线线路长度G:横断面距离E“KO”:起点里程U“XO”M“YO”起点XY坐标K:求算点里程XY:求算点XY坐标下标为1时为左侧、下标为2时为右侧FWJ:方位角JL:距离存储器T未使用以下程序代码可计算直线、曲线、螺旋线、匝道中边桩坐标程序名:ZDZBJSDeg:N“XC”≠0=>Q“YC”◣D:Z“0=SD 1=A 2=B 3=C 4=D 5=E ……”:Z≠0=>Z=AbsZ:Goto 0◣E“KO”U“XO”M“YO”O“FWJ”R H“R2”P :Goto 1↙Lb1 0:Prog“ZDDIR”:↙Lb1 1:Fixm:{KG}:X=R:R≠0=>X=2/R◣K<E=>Goto 0◣K>E+P=>Goto 0◣L=Abs(K-E):I=H:H≠0=>I=1/H◣I=L(I-X/2)/P:J=O+90L(I+X)/π:W=O+45L(I/2+X)/π:Y=O+45L(I/8+X)/(4π):S=O+135L(3I/8+X)/(4π):C=O+225L(5I/8+X)/(4π):V=O+315L(7I/8+X)/(4π):A=O+45L(I/4+X)/(2π):I=O+135L(3I/4+X)/(2π):X=U+L(CosO+4(CosY+CosS+CosC+CosV)+2(CosA+CosW+CosI)+CosJ)/24:Y=M+L(SinO+4(SinY+SinS+SinC+SinV)+2(SinA+SinW+SinI)+SinJ)/24:G=0=>X◢Y◢Goto 2◣A=J-90:A<0=>A=360+A◣S=AbsG:Rec(S,A):X=X-I S/G◢Y=Y-JS/G◢Lb1 2:N=0=>Goto 3◣Pol(X-N,Y-Q):J<0=>J=J+360◣J“FWJ=”◢I“JL=”◢↙Lb1 3:D=0=>Goto 1◣L>P-D=>L=P-D◣K≥E=>K=E+L+D:Goto 1◣程序名: ZDDIRLb1 0:Z>5=>Goto Z◣Z=1=>Goto A◣Z=2=>Goto B◣Z=3=>Goto C◣Z=4=>Goto D◣Z=5=>Goto E◣Goto ALb1 Z:{ZK }:Z“1=A 2=B 3=C 4=D 5=E ……”:Goto 0Lb1 A:K≤E2=> E=E1:U=U1:M=Y1:O=O1:R=±R1:H=±R2:P=P1:Goto 1◣↙K≤E3=>E=E2:U=U2:M=Y2:O=O2:R=±R1:H=±R2:P=P2:Goto 1◣Goto Z↙Lb1 B:K≤E2=> E=E1:U=U1:M=Y1:O=O1:R=±R1:H=±R2:P=P1:Goto 1◣↙K≤E3=>E=E2:U=U2:M=Y2:O=O2:R=±R1:H=±R2:P=P2:Goto 1◣Goto Z↙Lb1 C:K≤E2=> E=E1:U=U1:M=Y1:O=O1:R=±R1:H=±R2:P=P1:Goto 1◣↙K≤E3=>E=E2:U=U2:M=Y2:O=O2:R=±R1:H=±R2:P=P2:Goto 1◣Goto Z↙Lb1 D:K≤E2=> E=E1:U=U1:M=Y1:O=O1:R=±R1:H=±R2:P=P1:Goto 1◣↙K≤E3=>E=E2:U=U2:M=Y2:O=O2:R=±R1:H=±R2:P=P2:Goto 1◣Goto Z↙Lb1 E:K≤E2=> E=E1:U=U1:M=Y1:O=O1:R=±R1:H=±R2:P=P1:Goto 1◣↙K≤E3=>E=E2:U=U2:M=Y2:O=O2:R=±R1:H=±R2:P=P2:Goto 1◣Goto ZLb1 N:K≤E n+1=> E=E n:U=U n:M=Y n:O=O n:R=±R n:H=±R n1:P=P n:Goto 1◣↙K≤E n+3=>E=E n2:U=U n2:M=Y n2:O=O n2:R=±R n1:H=±R n2:P=P n2:Goto 1◣Goto ZLb1 1:D:逐桩间距N“XC”Q“YC”测站XY坐标O:线路方位角R:起点半径H“R2”:终点半径 2 P:直(曲)线线路长度G:横断面距离(左负右正) E“KO”:起点里程U“XO”M“YO”起点XY坐标K:求算点里程XY:求算点XY坐标FWJ:方位角JL:距离R1?第一半径,直线输入0(如HZ、HZH)、匝道及螺旋线时输入上段曲线半径左偏为负右偏为正。
4800计算程序
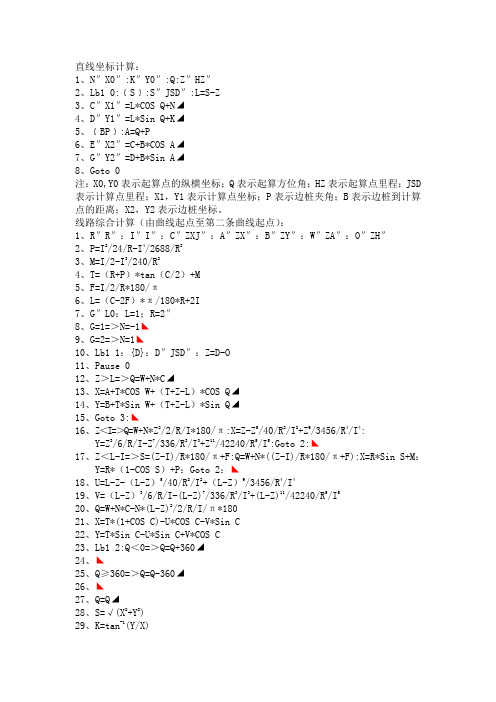
直线坐标计算:1、N″X0″:K″Y0″:Q:Z″HZ″2、Lb1 0:﹛S﹜:S″JSD″:L=S-Z3、C″X1″=L*COS Q+N◢4、D″Y1″=L*Sin Q+K◢5、﹛BP﹜:A=Q+P6、E″X2″=C+B*COS A◢7、G″Y2″=D+B*Sin A◢8、Goto 0注:X0,Y0表示起算点的纵横坐标;Q表示起算方位角;HZ表示起算点里程;JSD 表示计算点里程;X1,Y1表示计算点坐标;P表示边桩夹角;B表示边桩到计算点的距离;X2,Y2表示边桩坐标。
线路综合计算(由曲线起点至第二条曲线起点):1、R″R″:I″I″:C″ZXJ″:A″ZX″:B″ZY″:W″ZA″:O″ZH″2、P=I2/24/R-I4/2688/R33、M=I/2-I3/240/R24、T=(R+P)*tan(C/2)+M5、F=I/2/R*180/π6、L=(C-2F)*π/180*R+2I7、G″L0:L=1;R=2″8、G=1=>N=-1◣9、G=2=>N=1◣10、Lb1 1:{D}:D″JSD″:Z=D-O11、Pause 012、Z>L=>Q=W+N*C◢13、X=A+T*COS W+(T+Z-L)*COS Q◢14、Y=B+T*Sin W+(T+Z-L)*Sin Q◢15、Goto 3:◣16、Z<I=>Q=W+N*Z2/2/R/I*180/π:X=Z-Z5/40/R2/I2+Z9/3456/R4/I4:Y=Z3/6/R/I-Z7/336/R3/I3+Z11/42240/R5/I5:Goto 2:◣17、Z<L-I=>S=(Z-I)/R*180/π+F:Q=W+N*((Z-I)/R*180/π+F):X=R*Sin S+M:Y=R*(1-COS S)+P:Goto 2:◣18、U=L-Z-(L-Z)5/40/R2/I2+(L-Z)9/3456/R4/I419、V=(L-Z)3/6/R/I-(L-Z)7/336/R3/I3+(L-Z)11/42240/R5/I520、Q=W+N*C-N*(L-Z)2/2/R/I/π*18021、X=T*(1+COS C)-U*COS C-V*Sin C22、Y=T*Sin C-U*Sin C+V*COS C23、Lb1 2:Q<0=>Q=Q+360◢24、◣25、Q≥360=>Q=Q-360◢26、◣27、Q=Q◢28、S=√(X2+Y2)29、K=tan-1(Y/X)30、X=A+S*COS(W+N*K)◢31、Y=B+S*Sin(W+N*K)◢32、Goto 3:◣33、Lb1 334、{JE}35、X″EX″=X+E*COS(Q+J)◢36、Y″EY″=Y+E*Sin(Q+J)◢37、Goto 1注:R表示曲线半径;I表示缓和曲线总长;ZXJ表示转向角;ZX、ZY表示直缓点(直圆点)纵横坐标;ZA表示起算方位角;ZH表示直缓(直圆)点里程;L(1)或R(2)表示左转或右转;JSD表示计算点里程;Q表示计算点切线方位角;X、Y表示计算点坐标;E表示边桩到计算点的距离;J表示边桩与线路的夹角;EX、EY表示边桩坐标。
4800(4850)万能曲线计算程序

一:万能曲线4800(4850)分段计算程序Lb1 1:{EG}:A"XA" B"YA" C"CA" 8D"1÷RA" E"1÷RB" F"DKA" G"DKB"Lb1 2:{HOR}:H"DKI" O"DL" R"DR":H-G>0 ⇒Goto3⊿(空心三角) 88P=(E-D)÷Abs(G-F):Q=Abs(H-F):I=P×QJ=C+(I+2D)×Q×90÷π ▲8M=C+(I÷8+2D)×Q×45÷(4π)8N=C+(3I÷8+2D)×Q×135÷(4π)8U=C+(5I÷8+2D)×Q×225÷(4π)8V=C+(7I÷8+2D)×Q×315÷(4π)8K=C+(I÷4+2D)×Q×45÷(2π)8W=C+(I÷2+2D)×Q×45÷π8Z=C+(3I÷4+2D)×Q×135÷(2π)8﹛T﹜X=A+Q÷24×(cosC+4×(cosM+cosN+cosU+cosV)+2×(cosK+cosW+cosZ)+cosJ)▲Y=B+Q÷24×(sinC+4×(sinM+sinN+sinU+sinV)+2×(sinK+sinW+sinZ)+sinJ)▲U“XL”=X+Ocos(J-(180-T))◢▲V“YL”=Y+Osin(J-(180-T)) ◢▲W“XR”=X+Rcos(J+T) ◢▲Z“YR”=Y+Rsin(J+T) ◢▲8Goto 2Lb 83:A=X:B=Y:D=E:F=G:C=J :Goto 1注:A-曲线元起点A的X坐标、B-曲线元起点A的Y坐标、C-曲线元起点A 的切线方位角、F-曲线元起点A的里程、G-曲线元终点B的里程、H-曲线元上待求点I的里程、D-曲线元起点A的曲率、E-曲线元终点B的曲率、XL-左边线点位的X坐标、YL-左边线点位Y的坐标、XR-右边线点位的X坐标、YR-右边线点位的Y坐标、X,Y-中线点位X,Y坐标、O-左边线距中线平距、R-右边线距中线平距第1页该程序需要输入的数据为:(1)曲线元起点A的坐标及切线坐标方位角计算器上用“XA、YA、CA”显示;(2)曲线元起点A和曲线元终点B的曲率,计算器上用1÷RA、1÷RB显示(曲线左偏时取“-”)(3)曲线元起点A和曲线元终点B的里程,计算器上:“DKA,KDB”显示;(4)输入待求点的里程和该点距左右边线的水平距离,计算器上用“DKI、DL、D R”显示;(5)每计算完一个待求点的中线及边线坐标,程序会让输入下一个点的DKI,DL,DR。
4800及4850计算器程序

4800及4850计算器常用程序ZBZS(坐标正算)E“X1=”:F“Y1=”:G“T1=LbI 0:Fixm:{AS}:G>360=>G=G-360 “T2=”:G DMSE=E+ScosG:“X2=”:F=F+SsinG: “Y2=”X1:起算点的X坐标Y1:起算点的Y坐标T1:起算边指向计算前进方向的坐标方位角A:计算前进方向的左角ZBFS(坐标反算)A“X1=”:B“Y1=”:C“X2=”:D“Y2=”:POL(C-A,D-B):Fixm:J>0=>W=J:≠“W(1-2)=”“S(1-2)=”:XLYH(线路优化程序)A“XA=”:B“YA=”:C“TA=”:E“1÷RA,Z-,Y+”:P“KA=LbI1: {FQ}:F“1÷RB,Z-,Y+”:Q“KB=LbI2:{VDZ}:V“K=”:Z“JIA-JIAO=”:D“WAIYI=(Z-,Y+)”: O=V:O<P=>Goto 3: ≠LbI3: “K-SMALL”LbI4: O>Q=>Goto 5: ≠LbI5: “JISUAN:A-TXY”LbI6: T=C+90+3.1415926×(2E+(F-E)(V-P)÷(Q-P))(V-P):Rad:W=A+∫(cos(C0+0.5×(2E+(F-E)(X-P)÷(Q-P))(X-P), P,V,4)+D×cos(T0+ Z0)Y=B+∫(sin(C0+0.5×(2E+(F-E)(X-P)÷(Q-P))(X-P)),P,V,4)+D×sin(T0+ Z0):LbI 7: O≤Q=>Goto 9:≠LbI 9: W“X=Y“Y=”T“T=”XA:起算点的X坐标YA:起算点的Y坐标TA:起算点的切线方位角1÷RA,Z-,Y+:起算点的曲率(1/R),左偏曲线为正,右偏曲线为负KA:起算点的里程1÷RB,Z-,Y+:终算点的曲率(1/R),左偏曲线为正,右偏曲线为负KB:终算点的里程JIA-JIAO:边桩计算时所要输的与线路切向的夹角,计算点与线路正交时输90度,斜交时则输与线路切向右侧所夹的斜交角度WAIYI=(Z-,Y+):边桩计算时所要输的计算点到中线点的直线距离(即边桩的外移距离),计算点位于线路左侧时为负,位于线路右侧时为正程序说明:本程序计算线路坐标时要将线路分段(一般分直线段、第一缓和曲线段、圆曲线段、第二缓和曲线段、直线段以此循环)进行计算,例如:缓和曲线加圆曲线计算时,必须将曲线分三段进行计算,先输(起点要素)ZH点的坐标XA、YA,ZH到JD的方位角(即ZH点的切线方位角)TA,ZH 点的曲率1÷RA、里程KA,再输(终点要素)HY点的曲率1÷RB、里程KB,然后输入ZH到HY间任意点的里程便可计算;当所输计算点里程大于HY点里程时,程序显示“JISUAN:A-TXY”表示所要计算点超过第一缓和曲线计算范围,此时程序自动默认HY点的曲线要素为圆曲线计算段的起点要素,用户只需再输入(终点要素)YH点的曲率1÷RB、里程KB,就可计算圆曲线上任意点;当计算点里程大于YH 点里程时,程序显示“JISUAN:A-TXY”表示所要计算点超过圆曲线计算范围,程序自动默认YH点的曲线要素为第二缓和曲线计算段的起点要素,用户只需再输入(终点要素)HZ点的曲率1÷RB、里程KB,就可计算第二缓和曲线上任意点。
4800计算器编程
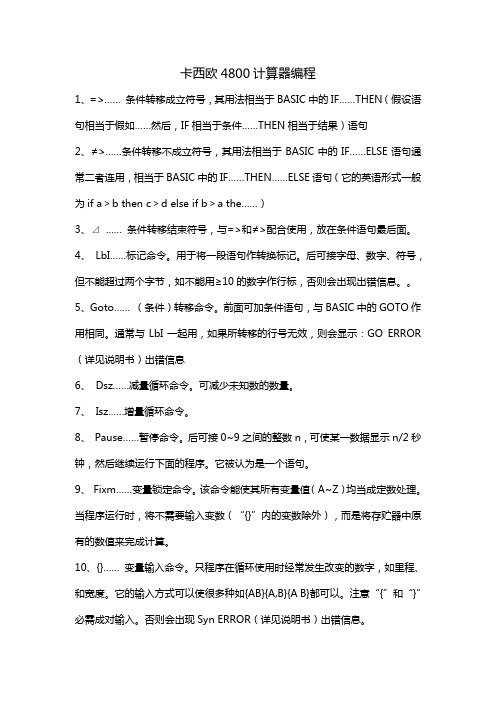
卡西欧4800计算器编程1、=>……条件转移成立符号,其用法相当于BASIC中的IF……THEN(假设语句相当于假如……然后,IF相当于条件……THEN相当于结果)语句2、≠>……条件转移不成立符号,其用法相当于BASIC中的IF……ELSE语句通常二者连用,相当于BASIC中的IF……THEN……ELSE语句(它的英语形式一般为if a>b then c>d else if b>a the……)3、⊿……条件转移结束符号,与=>和≠>配合使用,放在条件语句最后面。
4、 LbI……标记命令。
用于将一段语句作转换标记。
后可接字母、数字、符号,但不能超过两个字节,如不能用≥10的数字作行标,否则会出现出错信息。
5、Goto……(条件)转移命令。
前面可加条件语句,与BASIC中的GOTO作用相同。
通常与LbI一起用,如果所转移的行号无效,则会显示:GO ERROR(详见说明书)出错信息6、 Dsz……减量循环命令。
可减少未知数的数量。
7、 Isz……增量循环命令。
8、 Pause……暂停命令。
后可接0~9之间的整数n,可使某一数据显示n/2秒钟,然后继续运行下面的程序。
它被认为是一个语句。
9、 Fixm……变量锁定命令。
该命令能使其所有变量值(A~Z)均当成定数处理。
当程序运行时,将不需要输入变数(“{}”内的变数除外),而是将存贮器中原有的数值来完成计算。
10、{}……变量输入命令。
只程序在循环使用时经常发生改变的数字,如里程、和宽度。
它的输入方式可以使很多种如{AB}{A,B}{A B}都可以。
注意“{”和“}”必需成对输入。
否则会出现Syn ERROR(详见说明书)出错信息。
11、=、≠、>、<、≤、≥……条件运算关系算子,常与Goto命令构成条件转换语句。
12、Prog……在正常情况是下打开程序的快捷键。
在编程过程中是运行子程序命令,后接子程序名(一定要加引号,且要注意空格,否则会出现Syn ERROR的出错信息。
4800计算器计算程序
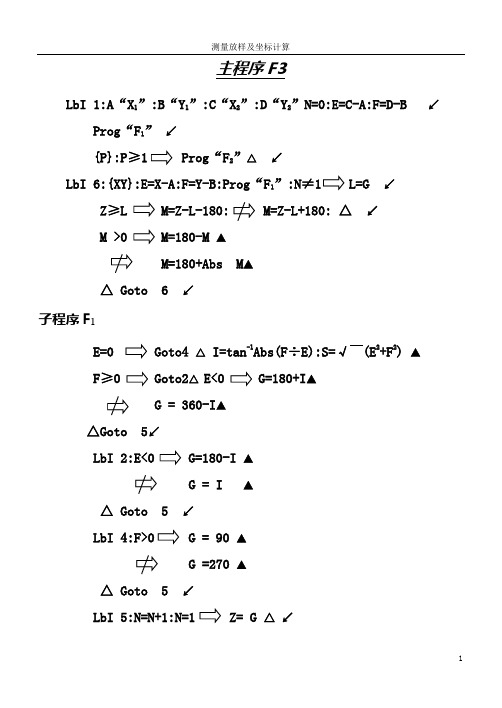
主程序F3LbI 1:A“X1”:B“Y1”:C“X2”:D“Y2”N=0:E=C-A:F=D-B ↙ Prog“F1”↙{P}:P≥1 Prog“F2”△↙LbI 6:{XY}:E=X-A:F=Y-B:Prog“F1”:N≠1 L=G ↙Z≥L M=Z-L-180: M=Z-L+180: △↙M >0 M=180-M ▲M=180+Abs M▲△ Goto 6 ↙子程序F1E=0 Goto4 △ I=tan-1Abs(F÷E):S=√ (E2+F2) ▲F≥0 Goto2△E<0 G=180+I▲G = 360-I▲△Goto 5↙LbI 2:E<0 G=180-I ▲G = I ▲△ Goto 5 ↙LbI 4:F>0 G = 90 ▲G =270 ▲△ Goto 5 ↙LbI 5:N=N+1:N=1 Z= G △↙子程序F2LbI 9:{SI}:P=G+180-I:X=A+Scosp▲Y=B+SsinP ▲{o}:o≤0 Goto 9 △ o≤1 A=X:B=Y:G=P+180:G>360 G = G-360:Goto 9 △↙说明:1、主程序F3,已知座标放线;2、P<1主程序进入座标放样计算,P≥1时主程序进入座标计算;3、F3中的S是站点至待放点的距离,M是后视点至待放点的左角。
4、F2中的O表示站点,O>1迁站重新输入(X1,Y1)(X2,Y2)计算座标。
输入转角I时;转角左转I取“+”,右转I取“—”。
5、F2中的S,是表示站点至待求座标点的距离,用测距仪测定。
主程序:PQXLbI O:A“K0”:B“X0”:C“Y0”:D“L0”:E“A0”:F“B0”:G“K1”:N :R:T:Z:L=K-A:S=K-A-D:I=G-K ↙{K} ↙N<1 Prog “P1”:Goto O △↙N=1 Prog “P2”:Goto O △↙Prog “P3”↙Goto O ↙子程序:P1Z≤1 X=B+[L-L5÷(40R2D2)]CosE+[L3cos(E+90)]÷(6RD)▲Y=C+[L-L5÷(40R2D2)]sinE+[ L3sin(E+90)] ÷(6RD) ▲Y=C+[L-L5÷(40R2D2)]sinE+[ L3sin(E-90)] ÷(6RD)▲子程序:P2Z≤1 X=B+[D- D3÷(40R2)]cosE+[(D2÷(6R))]cos(E+90)+[S-S3÷(6 R2 )+ S5 /(120R4 )]Cos[E+(90D) ÷(πR )]+[ S2÷(2R)-S4÷(24R3)+S6÷(720R5)]cos[E+(90D)÷(πR)+90] ▲ Y=C+[D- D3÷(40R2)]sinE+[(D2÷(6R))]sin(E+90)+[S-S3÷(6R2)+S5÷(120R4)]sin[E+(90D)÷(πR)]+[S2÷(2R)-S4÷(24R3)+S6÷(720R5)]sin[E+(90D)÷(πR)+90] ▲X=B+[D-D3÷(40R2)]cosE+[(D2÷(6R)]cos(E-90)+[S-S3÷(6R2) +S5÷(120R4)]cos[E-(90D)÷(πR)]+[S2÷(2R)-S4÷(24R3)+S6÷(720R5)]cos[E-(90D)÷(πR)-90] ▲Y=C+[D-D3÷(40R2)]sinE+[(D2÷(6R)]sin(E-90)+[S-S3÷(6R2) +S5÷(120R4)]sin[E-(90D)÷(πR)]+[S2÷(2R)-S4÷(24R3)+S6÷(720R5)]sin[E-(90D)÷(πR)-90] ▲子程序:P3Z≤1 X=B+TcosE+Tcos(E+F)+[I-I5÷(40R2D2)]cos(E+F+180) +[I3÷(6RD)]cos(E+F+180-90)▲Y=C+TsinE+Tsin(E+F)+[I-I5÷(40R2D2)]sin(E+F+180) +[I3÷(6RD)]sin(E+F+180-90)▲X=B+TcosE+Tcos(E-F)+[I-I5÷(40R2D2)]cos(E-F+180) +[I3÷(6RD)]cos(E-F+180+90)▲Y=C+TsinE+Tsin(E-F)+[I-I5÷(40R2D2)]sin(E-F+180)+[I3÷(6RD)]sin(E-F+180+90)▲说明:1.K0为ZH点桩号;(X0,Y0)为ZH点座标;L0为缓和曲线段长度,A0为直线方位角;B0为转角;K1为HZ点桩号;N为条件参数;R为半径;T为切线长;Z为条件参数;K为待求点桩号。
工程测量员-4800计算器坐标正算、反算编程
1.主程序(TYQX js)"1.SZ => XY":"2.XY => SZ":N:U"X0":V"Y0":O"S0":G"F0":H"LS":P"R0":R"RN":Q:C=1P:D=(P-R)(2HPR):E=180π:N=1=>Goto 1:≠>Go to 2Δ←┘Lbl 1:{SZ}:SZ:W=Abs(S-O):Prog "SUB1":X"XS"=X◢Y"YS"=Y◢Goto 1←┘Lbl 2:{XY}:XY:I=X:J=Y:Prog "SUB2":S"S"=O+W◢Z"Z"=Z◢Goto 22. 正算子程序(SUB1)A=0.1739274226:B=0.3260725774:K=0.0694318442:L=0.3300094782:F=1-L:M=1-K:X=U+W(Acos(G+QEKW(C+KWD))+Bcos(G+QELW(C+LWD))+Bcos(G+QEFW(C+F WD))+Acos(G+QEMW(C+MWD))):Y=V+W(Asin(G+QEKW(C+KWD))+Bsin(G+QELW(C+LWD))+Bsin(G+QEFW(C+FW D))+Asin(G+QEMW(C+MWD))):F=G+QEW(C+WD)+90:X=X+ZcosF:Y=Y+ZsinF3. 反算子程序(SUB2)T=G-90:W=Abs((Y-V)cosT-(X-U)sinT):Z=0:Lbl 0:Prog "SUB1":L=T+QEW(C+WD):Z=(J-Y)cosL-(I-X)sinL:AbsZ<1E-6=>Goto1:≠>W=W+Z:Goto 0Δ←┘Lbl 1:Z=0:Prog "SUB1":Z=(J-Y)sinF二、使用说明1、规定(1) 以道路中线的前进方向(即里程增大的方向)区分左右;当线元往左偏时,Q=-1;当线元往右偏时,Q=1;当线元为直线时,Q=0。
4800计算器路线座标计算程序
座标计算程序ADefm8XYD″X1″:E″Y1″∶F″X2″∶G″Y2″∶H″X3″∶V″Y3″RL″Ls″W″ZH″I=D-F∶J=E-G∶Prog″C″∶O=J∶I=H-F∶J=V-G∶Prog″C″∶U=JM=O-J∶M<0=>M=M+360◣M<180=>M=180-M∶C=1∶≠>M=M-180∶C= -1◣P=L2/(24R)∶Q=L/2-L3/(240R2)∶T=(P+R)×tg(M/2)+Q Fix 3∶S=RMπ/180+L∶S◢Norm∶Prog″B″BLbI 0∶Z∶Fixm∶{ KB}∶I=K-W∶J=Z∶BI< S-L=> I≤0=>M=I+BCosZ∶N=BSinZ∶Goto2◣C=1=>J=180-Z ◣I≤L=>Prog″D″∶≠>Prog″F″◣LbI 2∶J=O∶Prog″G″∶Goto 0◣I=S-II≤0=>M=I-BCosZ∶N= -BSinZ∶≠>C≠1=>J=180-Z◣Prog″D″∶N= -N◣J=U∶Prog″G″∶Goto 0CPol(I,J)∶J<0=>J=J+360◣EA=A-J:M=M-CBCosA∶N=CN-BsinAFA=90/(Rπ)×(2I-L)∶M=RsinA+Q∶N=R×(1-CosA)+P∶Prog″E″GA=CosJ∶J=SinJ∶I=F+TA-MA+NJ∶J=G+TJ-MJ-NA∶M=I∶N=J I=I-X∶J=J-Y∶Prog″C″∶Fix3∶J◢I◢NOrm∶Prog″8″8Fix3∶Z[1]=X+ICosJ∶Z[1]◢Z[2]=Y+IsinJ: Z[2] ◢NormDA=RL:M=I-I5/(40A2):N=I3/(6A)-I7/(336A3):A=90 I2/(Aπ)∶Prog″E″高程计算程序(不适应单向横坡)1F1 L1J″JD″D″HJ″TRO″H1″E″K1″P″H2″G″K2″L2 S=(D-O) /(J-E):U=(P-D)/(G-J):M=J-T:N=J+T:W=S-U:W<0=>C=1:≠>C=-1◣L3 Prog22F2 L1 LbI 0:Z:Fixm:{ KBI}:KBFI:K=K+BcosZ:B=BsinZL2 K<N=>K≤M=>H=D+S(K-J)-0.01I(AbsB-F) :≠>H=D+S(K-J)+C(K-J+T)2/(2R) -0.01I (AbsB-F)◣≠> H=D+U(K-J)- 0.01I (AbsB-F)◣L3 Fix3:H◢NormL4 Goto 0J″JD″:竖曲线交点桩号D″HJ″:竖曲线交点高程T :竖曲线切线长R :竖曲线半径O″H1″:前一交点高程E″K1″:前一交点桩号P″H2″:后一交点高程G″K2″:后一交点桩号Z :交角(与路线前进方向的右夹角)K :竖曲半径B :边桩距离,左负右正F :设计标高偏离设计中心线的距离I :路拱横坡,例如:2%只输入I=2即可。
卡西欧4800 4850计算器程序

卡西欧4800\4850计算器计算程序及说明一:坐标反算:(ZBFS)1 程序步骤:C”X1”:D”Y1”:E”X2”:F”Y2”:Fixm:Pol(E-C,F-D:I”S1-2=”▲J≤O=>J=J+360△J”A1-2=”2 操作过程:ZBFS→EXE→输入X1值→EXE→输入Y1值→EXE→输入X2值→EXE→输入Y2值→EXE→EXE→EXE注:①:S1-2:计算得出的距离。
②:A1-2:计算得出的角度。
(按shift°′″转换为60进制的角度)③:此程序可循环计算。
3 案例:已知:D1坐标(7811.23,606.136),D2坐标(7805.915,431.910)求解: a D1-D2(A1-2)=268°15′09.56 ″S D1-D2(S1-2)=174.3071二:坐标正算:(ZBZS)1 程序步骤:C”X1”:D”Y1”:S”S1-2”:R”A1-2”:Fixm:X”X2”=C+Rec(S,R) ▲Y”Y2”=D+J2 操作过程:ZBZS→EXE→输入X1值→EXE→输入Y1值→EXE→输入S1-2距离值→EXE→输入A1-2角度(例268°15′09.56 ″)值→EXE→EXE注:①:X2计算得出坐标,Y2计算得出坐标。
②:此程序可循环计算。
3 案例:已知:D1坐标(7811.23,606.136),两点距离:S D1-D2(S1-2)=174.3071方位角:a D1-D2(A1-2)=268°15′09.56 ″ 求解:D2坐标(7805.915,431.910三:线路曲线计算程序:(XLQXJS)(万能公式)1 程序步骤:1.Lbl 0:{E G}:A“XA”:B“YA”:C“CA”:D“1/RA”:E“1/RB”:F“DKA”: G“DKA”2.Lbl 1:{H O R}:H“DKI”:O“DL”:R“DR”:H>G=﹥Goto 3⊿3.P=(E-D)/Abs(G-F):Q=Abs(H-F):I=P×Q:T=D+I4.J=C+(I+2D)×Q×90/π ▲5.M=C+(I/4+2D)Q×45/(2π):N=C+(3I/4+2D)Q×135/(2π):6.K=C+(I/2+2D)Q×45/π7.X=A+Q(cosC+4(cosM+cosN)+2cosK+cosJ)/12 ▲8.Y=B+Q(sinC+4(sinM+sinN)+2sinK+sinJ)/12 ▲9.U“XL”=X+Ocos(J-90) ▲10.V“YL”=Y+Osin(J-90) ▲11.W“XR”=X+Rcos(J+90) ▲12.Z“YR”=Y+ Rsin(J+90) ▲13. A=X:B=Y:C=J:D=T:F=H:Goto 1Lbl 3: A=X:B=Y:D=E:F=G:C=J:Goto 0程序说明:A- 曲线元起点A的坐标;B- 曲线元起点B的坐标;C- 曲线元起点A的切线坐标方位角;F- 曲线元起点A的里程;G- 曲线元起点B的里程;H- 曲线上待求点i的里程;D- 曲线元起点A的曲率;E- 曲线元终点B的曲率;XL-左边线点位X坐标;YL-左边线点位Y坐标;XR-右边线点位X坐标;YR-右边线点位Y坐标;X- 中线点位纵坐标;Y- 中线点位横坐标;DL-左边线距中线平距;DR-右边线距中线平距;该程序需要输入的数据为:(1).曲线元起点A的坐标及切线坐标方位角,计算器上用“XA”,“YA”,“CA”显示;(2).曲线元起点A和B的曲率,计算器上用I÷RA,I÷RB 显示(曲线左偏时取“-”);(3).曲线元起点A和终点B的里程,计算器上用“DKA”,“DKB”显示;(4).输入待求点里程和该点距左右的水平距离,计算器上用“DKI”,“DL”,“DR”显示;每算完一个待求点的中线及边线坐标,程序又让输入下一点的“DKI”,“DL”,“DR”当输入的“DKI”大于“DKB”时程序中显示“1÷RB”和“DKB”,此时输入下一个曲线元起点的曲率和里程,然后重复步骤(4),即可计算下一个曲线中线及边线点位坐标。
卡西欧4800系列 计算器程序
十一.BI DAO XIAN(闭导线)1.用途:该程序是“闭合导线平差”的计算程序。
2.程序数学模型:3.程序清单:Defm 40:X“X0”:Y“Y0”:F“A0”:N“UNKNOWN POINT”:N=N+1↙I=0:E=0:C=0:Lbl 0 ↙I=I+1:{L,D}:Z[2I-1]=L:Z[2I]=D:E=E+L:C=C+D:I<NGoto 0 Δ B“FW”=E-180(N-2)◢R:A“FR”=RN◢B=-B÷N:I=1:Z[2N+1]=F:Lbl 1 ↙I+I+1◢F=F+Z[2I-1]:F180F=F+180:F=F-180 Δ F360F+F-360 ΔZ[2N+2I-1]“A”=F+(I-1)B◢I<NGoto 1Δ I=0:G=0:H=0:Lbl 2 ↙I+I+1:Z[2I-1]=Z[2I]cosZ[2N+2I-1]:G=G+Z[2I-1]:Z[2N+2I]=Z[2I]sin Z[2N+2I-1]:H=H+Z[2N+2I]:I<N Goto 2 Δ G“FX”◢H“FY”◢I“F”=(G2+H2)◢K=I÷C◢U=-G÷C:V=-H÷C↙I=0:Lbl 3 ↙I+I+1◢Z[2I-1]=Z[2I-1]+U Z[2I]:Z[2N+2I]=Z[2N+2I]+V Z[2I]:X=X+ Z[2I-1]◢Y=Y+ Z[2N+2I]◢I<N-1Goto 3:“END”4.程序说明:X0,Y0,A0——已知的起始点的纵、横坐标及起始边的坐标方位角。
UNKNOWN POINT——待求未知点的个数。
L,D——观测的导线各左转角及平距。
FW,R,FR——导线角度闭合差、角度闭合差的允许误差的系数及允许误差值。
I,A——各条导线边序号及其坐标方位角。
FX,FY——坐标增量ΔX、ΔY的闭合差。
F,K——导线全长闭合差、导线全长相对闭合差。