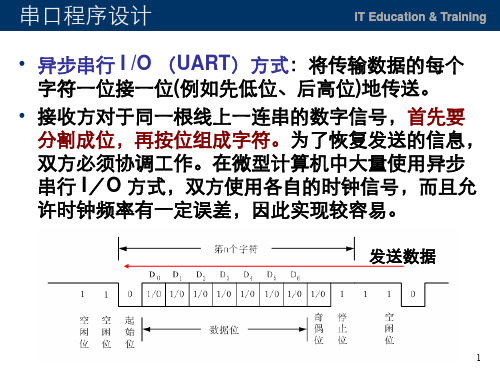
Linux串口应用开发
linux下串口编程简单实例

linux下串口编程简单实例 (2010-04-27 16:58)分类:嵌入式1、 linux中的串口设备文件存放于/dev目录下,其中串口一,串口二对应设备名依次为“/dev/ttyS0”、“/dev/ttyS1”。
在linux下操作串口与操作文件相同。
2、在使用串口之前必须设置相关配置,包括:波特率、数据位、校验位、停止位等。
串口设置由下面结构体实现:该结构中c_cflag最为重要,可设置波特率、数据位、校验位、停止位。
在设置波特率时需在数字前加上‘B’,如B9600、B19200。
使用其需通过“与”“或”操作方式。
常用的串口控制函数:Tcgetattr 取属性(termios结构)Tcsetattr 设置属性(termios结构)cfgetispeed 得到输入速度Cfgetospeed 得到输出速度Cfsetispeed 设置输入速度Cfsetospeed 设置输出速度tcflush 刷清未决输入和/或输出3、串口的配置(1) 保存原先串口配置使用tcgetattr(fd,&oldtio)函数:struct termios newtio,oldtio;tcgetattr(fd,&oldtio);(2) 激活选项有CLOCAL和CREAD,用于本地连接和接收使能。
newtio.c_cflag | = CLOCAL | CREAD;(3) 设置波特率,使用函数cfsetispeed、 cfsetospeedcfsetispeed(&newtio, B115200);cfsetospeed(&newtio, B115200);(4) 设置数据位,需使用掩码设置。
newtio.c_cflag &= ~CSIZE;newtio.c_cflag |= CS8;(5) 设置奇偶校验位,使用c_cflag和c_iflag。
设置奇校验:newtio.c_cflag |= PARENB;newtio.c_cflag |= PARODD;newtio.c_iflag |= (INPCK | ISTRIP);设置偶校验:newtio.c_iflag |= (INPCK | ISTRIP);newtio.c_cflag |= PARENB;newtio.c_cflag &= ~PARODD;(6) 设置停止位,通过激活c_cflag中的CSTOPB实现。
linux_虚拟串口实现方法_概述及解释说明
linux 虚拟串口实现方法概述及解释说明1. 引言1.1 概述本文将介绍Linux下实现虚拟串口的方法,并对每种方法进行解释说明。
虚拟串口指的是一种软件仿真的串口设备,可以模拟物理串口的功能,实现数据的收发和传输。
在Linux系统中,使用虚拟串口可以满足一些特定场景下的需求,如开发、测试和调试等。
1.2 文章结构本文按照以下结构进行组织:- 第一部分为引言,对文章进行概述,并介绍文章的结构和目标;- 第二部分将介绍虚拟串口的背景知识,包括串口通信原理、虚拟串口定义与作用以及Linux中虚拟串口的应用场景;- 第三部分将详细介绍Linux下实现虚拟串口的三种方法:内核模块方式、用户空间模拟方式和设备树(DT)方式;- 第四部分将对每种实现方法进行解释说明,包括其原理、特点和适用情况;- 第五部分为总结与展望,对文章内容进行总结并展望未来发展方向。
1.3 目的本文旨在提供一个全面且清晰的介绍Linux下实现虚拟串口方法的资料,帮助读者理解虚拟串口的概念和原理,并根据实际需求选择合适的实现方法。
通过阅读本文,读者将了解到不同实现方法的优缺点,以及它们在不同场景下的应用情况。
同时,本文也对未来虚拟串口技术的发展进行展望。
2. 虚拟串口的背景:2.1 串口通信的基本原理:串口是一种用于在计算机和外部设备之间进行数据传输的通信接口。
它通过一个物理连接,使用一组控制信号和数据信号来实现双向通信。
串口通信具有简单、可靠、广泛应用等特点,因此在许多领域都得到了广泛应用,如电脑与打印机、调制解调器、路由器等设备之间的连接。
2.2 虚拟串口的定义与作用:虚拟串口是对物理串口进行仿真或模拟的一种技术。
它通过软件方式模拟了一个不存在的串行接口,使得应用程序可以通过虚拟串口与外部设备进行通信。
虚拟串口具有操作灵活、易于扩展等特点,可以提供与物理串口相似或更强大的功能。
2.3 虚拟串口在Linux中的应用场景:在Linux系统中,虚拟串口广泛应用于各种嵌入式系统开发和调试场景。
嵌入式操作系统Linux中的串口应用编程

I
嵌入式操作系统 L x 的审口应用编程 iu 中 n
■ 厦 门 大 学 唐 建 东 卢 贵 主
针 对 嵌 入 式 Linux 操 作 系统 的 特 点 , 分 析 在 该 系统 下 串行 通 信 口编 程 控 制 的 方 法 , 总 结 程 序
摘
要
设 计 的 步 骤 ; 在 嵌 入 式 Linux 系 统 上 , 编 写控 制 程 序 , 成 功 地 实 现 嵌 入 式 系统 与微 机 系 统
4
Te s I s r m e s, U SA .TM ¥3 0C X / X / xa n t u nt 2 l C2
更详 细 的 内容 在 此 不 再 多述 , 本 人将 另 文 介 绍 。■ _
参考 文献
l 彭 启 琮 , 李 玉 柏 ,管 庆 .DS P与 实 时 数 字 信 号 处 理 .成 都 :电 子 科 技 大 学 出版 社 , l 9 5 9 2 戴 明 桢 .数 字 信 号 处理 的 硬 件 实现 . 北 京 :
根 据 不 同 条 件 控 制 不 同 的 设 备 。 基 于 美 国 电 子 工 业 协 会 E A 的 串 口通 信 标 准 一 I RS 3 , 是 目前 广 泛 使 22 用 的 设备 控 制 通 信 接 口 。在 嵌 入 式 系统 中实 现 串 口 通 信 , 可 延 伸 系 统 的 应 用 触 角 , 扩 大 系 统 的 数 据 采
# k od iln m e il tpe u b r um b r m n f e a f ey n m e n l e2
1 嵌 入式 操作 系统 L n x串 口模 块 u i
L n x操 作 系 统 的 主 要 优 点 是 稳 定 、 内 核 可 重 iu 新 编 译 、 提 供 开 放 的 内 核 源 代 码 。 Li u 内 核 采 用 n x
嵌入式linux串口应用程序编写流程

嵌入式linux串口应用程序编写流程嵌入式Linux系统提供了丰富的串口接口,可以通过串口与其他设备进行通信,这为开发嵌入式系统提供了很多可能性。
下面是编写嵌入式Linux串口应用程序的流程:1. 确定串口设备:首先要确定要使用的串口设备,可以使用命令`ls /dev/tty*`来查看系统中可用的串口设备列表。
根据需要选择合适的串口设备。
2. 打开串口设备:在Linux系统中,使用文件的方式来操作串口设备。
可以使用C语言中的open函数来打开串口设备文件,并返回串口设备的文件描述符。
例如:`int serial_fd = open("/dev/ttyUSB0", O_RDWR | O_NOCTTY | O_NDELAY);`。
其中,`O_RDWR`表示以读写模式打开串口设备,`O_NOCTTY`表示打开设备后不会成为该进程的控制终端,`O_NDELAY`表示非阻塞模式。
3. 配置串口参数:打开串口设备后,需要配置串口参数,包括波特率、数据位、停止位、校验位等。
可以使用C语言中的termios库来进行串口参数的配置。
例如:```cstruct termios serial_config;tcgetattr(serial_fd, &serial_config);cfsetispeed(&serial_config, B115200);cfsetospeed(&serial_config, B115200);serial_config.c_cflag |= CS8;serial_config.c_cflag &= ~PARENB;serial_config.c_cflag &= ~CSTOPB;tcsetattr(serial_fd, TCSANOW, &serial_config);```上述代码将波特率设置为115200,数据位设置为8位,无校验位,一个停止位。
linux 读写 串口 代码

linux 读写串口代码
在Linux中,可以使用/dev/ttyS*或/dev/ttyUSB*等设备文件来访问串口。
以下是一个简单的Python代码示例,演示如何使用pyserial库在Linux中读取和写入串口数据:
python复制代码
import serial
# 打开串口
ser = serial.Serial('/dev/ttyUSB0', 9600,
timeout=1)
# 写入数据
ser.write(b'Hello World!')
# 读取数据
data = ser.read(10) # 读取10个字节的数据
print(data)
# 关闭串口
ser.close()
在上面的代码中,我们首先使用serial.Serial()函数打开了一个名为/dev/ttyUSB0的串口,波特率为9600,超时时间为1秒。
然后,我们使用write()方法向串口写入了一个字符串Hello World!。
接下来,我们使用read()方法从串口读取了10个字节的数据,并将其存储在data变量中。
最后,我们打印出读取到的数据,并使用close()方法关闭了串口。
需要注意的是,在使用串口之前,需要先安装pyserial库。
可以使用以下命令在终端中安装该库:
shell复制代码
pip install pyserial。
linux c语言编写modbus rtu例程 -回复

linux c语言编写modbus rtu例程-回复如何使用C语言在Linux下编写Modbus RTU例程,以实现数据的读取和写入。
Modbus是一种通信协议,用于在工业自动化系统中实现设备之间的数据通信。
RTU是Modbus协议的一种传输格式,其中数据以二进制形式传输。
在Linux系统中,我们可以使用C语言来编写Modbus RTU例程。
下面将一步一步回答如何实现数据的读取和写入。
第一步:设置串口参数在Linux中,我们可以使用串口来与Modbus设备进行通信。
首先,我们需要设置串口的波特率、数据位、停止位和校验位。
这可以通过C语言中的termios库函数来实现。
c#include <termios.h>int set_serial_port(int fd, int baudrate) {struct termios options;tcgetattr(fd, &options);cfsetispeed(&options, baudrate);cfsetospeed(&options, baudrate);options.c_cflag = (CLOCAL CREAD);options.c_cflag &= ~CSIZE;options.c_cflag = CS8;options.c_cflag &= ~PARENB;options.c_cflag &= ~CSTOPB;options.c_cflag &= ~CRTSCTS;tcsetattr(fd, TCSANOW, &options);}以上代码中,`set_serial_port`函数用于设置串口参数。
`fd`参数为串口文件描述符,`baudrate`参数为波特率。
其中,`cfsetispeed`和`cfsetospeed`函数用于设置输入和输出速度,`CLOCAL`和`CREAD`标志用于使串口工作在本地模式和可读模式,`CS8`标志用于设置8位数据位,`PARENB`标志用于禁用奇偶校验,`CSTOPB`标志用于设置停止位为1位,`CRTSCTS`标志用于禁用硬件流控制。
Linux下的串口编程
Linux下的串口编程串口设备一般在/dev/ttyS0-ttyS4。
Linux下一切皆文件,把ttyS0结点当做文件操作,当然,获取描述符后先配置一下,open、read、write、close你肯定会吧,那,串口编程,你也肯定会了。
这代码我之前测试过,很ok,但发上来前,我可没测过哦,不过,看看,有思路也是不错的。
一:串口发送端程序/************************************************************** ***************************************文件:w_uart.c**编写者:huangminqiang**编写日期:2012年10月15号**简要描述:串口发送程序,在PC机上发送。
**修改者:**修改日期:2012年11月12号**注:*************************************************************** *************************************/#include#include#include#include#include#include#define COM '/dev/ttyS0'typedef enum{NON, //无校验ODD, //偶校验EVEN,//奇校验}cal_t;/****** 设置串口******************************************************************* ********************/static int set_com(int fd, int speed, int bits, cal_t cal, int stop ) {struct termios curtio;memset(&curtio, 0, sizeof(curtio));//取得串口已有的属性if (0 != tcgetattr(fd, &curtio)){perror('Failed to tcgetattr');return -1;}//设置输入输出波特率cfsetispeed(&curtio, speed);cfsetospeed(&curtio, speed);//设置为原始模式curtio.c_lflag &= ~(ECHO | ICANON | IEXTEN | ISIG | ECHOE | ECHOK | ECHONL);curtio.c_iflag &= ~(BRKINT | IUCLC | ICRNL | INLCR | IGNCR);//激活相应选项curtio.c_cflag |= CLOCAL | CREAD;//设置数据位curtio.c_cflag &= ~CSIZE;curtio.c_cflag |= bits;//设置校验位if (ODD == cal){curtio.c_iflag |= (INPCK | ISTRIP); curtio.c_cflag |= PARENB; curtio.c_cflag |= PARODD;}else if(EVEN == cal){curtio.c_iflag |= (INPCK | ISTRIP); curtio.c_cflag |= PARENB; curtio.c_cflag &= ~PARODD;}else{curtio.c_cflag &= ~PARENB;}//设置停止位if (2 == stop){curtio.c_cflag |= CSTOPB;}else{curtio.c_cflag &= ~CSTOPB;}//设置最少字符等待时间curtio.c_cc[VTIME] = 0; curtio.c_cc[VMIN] = 0;//清空缓冲tcflush(fd, TCIOFLUSH);//设置新串口属性if (0 != tcsetattr(fd, TCSANOW, &curtio)){perror('Failed to tcgetattr');return -1;}printf('set done!\n');return 0;}/****** 写入串口信息******************************************************************* ***************/int WriteUartInfo(void){int fd;int cnt = 0;int w_cnt = 0;unsigned char w_buf[128];//打开串口fd = open(COM, O_RDWR);if(0 > fd){perror('uart open err:');return -1;}#if 0//设置串口参数if (0 != set_com(fd, B115200, CS8, NON, 1)){printf('set_com failed!\n');goto _out;}#endif//发送信息while(1){printf('plese input a buffer : '); memset(w_buf, 0, sizeof(w_buf)); fgets(w_buf, sizeof(w_buf), stdin);w_cnt = write(fd, w_buf, sizeof(w_buf)); if(0 > w_cnt){perror('write error : ');goto _out;}printf('sent out ! \n');//结束判断if( !strncmp(w_buf, 'quit', 4) ){break;}}//关闭串口close(fd);return 0;_out:close(fd);return -1;}/****** 主函数******************************************************************* *********************/int main(void){if( WriteUartInfo() ){printf('write uart data failed!\n');return -1;}return 0;}二:串口接收端程序/************************************************************** ***************************************文件:r_uart.c**编写者:huangminqiang**编写日期:2012年10月15号**简要描述:串口接收程序,在板子上运行。
linux c语言 串口读取数据的方法

linux c语言串口读取数据的方法Linux下使用C语言读取串口数据的方法引言:串口是计算机和外部设备进行通信的一种重要的通信接口。
在Linux系统中,要使用C语言读取串口数据,需要通过打开串口设备文件,设置串口参数,并进行读取数据的操作。
本文将介绍如何通过C语言在Linux下读取串口数据的方法。
目录:1. 了解串口的工作原理2. 打开串口设备文件3. 设置串口参数4. 读取串口数据5. 示例程序6. 总结1. 了解串口的工作原理:在开始编写C语言读取串口数据的方法前,首先需要了解串口的工作原理。
串口是通过硬件电路实现两台设备之间的数据传输,属于一种异步串行通信方式。
典型的串口包含发送数据引脚(TX)、接收数据引脚(RX)、数据位、停止位、奇偶校验位等。
2. 打开串口设备文件:在Linux系统中,每个串口设备都被映射到一个设备文件上,例如/dev/ttyS0代表第一个串口设备,/dev/ttyUSB0代表第一个USB串口设备。
要使用C语言读取串口数据,需要首先打开相应的串口设备文件。
在C语言中,使用open()函数打开串口设备文件。
open()函数的原型如下:cint open(const char *pathname, int flags);其中pathname参数指定要打开的串口设备文件路径,flags参数指定打开方式。
常用的flags参数有O_RDONLY(只读方式打开)、O_WRONLY (只写方式打开)和O_RDWR(读写方式打开)。
例如,要打开第一个串口设备文件,可以调用open()函数如下:cint fd = open("/dev/ttyS0", O_RDWR);if (fd == -1){perror("Error opening serial port");return -1;}当open()函数成功打开串口设备文件时,会返回一个非负整数的文件描述符fd,用于后续的操作。
ARM嵌入式Linux开发——串口设置和开发
ARM嵌入式Linux开发——串口设置和开发1.串口设置及测试串口是常用的通信接口,在Linux操作系统中还是主要的系统调试和操作接口,早期的UNIX 计算机就是通过串口(附加了调制解调器提供远距离传输能力)连接终端与主机实现多用户操作的,因此继承了UNIX特点的Linux操作系统对于串口的支持非常丰富详细。
串口比网络接口的使用更加简单可靠(不需要复杂的驱动和设置,只需要确定波特率、数据位数、停止位数、校验位模式等几个重要参数即可使用),可用于网络环境尚未搭建完善以及网络出现故障情况下对设备的操作控制,通常交换机等缺乏显示和输入的设备均采用串口作为基本操作手段,此外在控制领域串口也是常用的通信形式。
1.1.物理主机中安装Virtual Serial Port Driver为了便于串口程序开发的调试,可以在物理主机上安装虚拟串口模拟软件,在本机模拟串口,实现脱离真实物理设备的串口通信开发调试,提高开发环境的灵活性和开发效率。
本例中采用Virtual Serial Port Driver软件,简称VSPD,安装在物理主机的Windows操作系统中,可通过端口映射提供给虚拟机使用。
安装过程如下:在Manage ports选项页中,点击“Add pair”按钮,添加一对Virtual ports串口对。
设置成交叉对,即两接口的输入和输出交叉互连,实现自闭环通信。
在物理主机中分别启动串口调试助手软件2次,打开2个软件操作窗口,每个软件窗口分别对应一个串口,即一个软件的串口设置为COM1,另一个软件的串口设置为COM2,并将波特率、校验位、数据位、停止位等参数设置为相同的值,互相发送数据,检查串口间的通信情况,确认其连通正常。
1.2.虚拟机中添加虚拟串口为了使虚拟机中Linux操作系统也能使用物理主机上的虚拟串口,需要进行设置。
在VMWare软件的“虚拟机”菜单中选择“设置”,打开“虚拟机设置”对话框,进入“硬件”页面,点击“添加”按钮添加串行端口,选使用宿主机上的物理串行端口,注意不要选“自动检测”,要明确指定COMx,此处x是物理主机Windows操作系统中的串口编号值。
13_1_n62嵌入式Linux串口应用开发共44页PPT资料
2019/12/2 Linux嵌入式操作系统 文全刚
6
4
• int tcgetattr(int fd,*ptr);
• 用来获取终端控制属性,它把串口的默认 设置赋给了termios数据结构。
• fd:待操作的文件描述符 • *ptr:指向termios结构的指针 • 函数返回:成功返回0,失败返回-1
• #include #include #include #include #include #include #include #include
<stdio.h> /*标准输入输出定义*/ <stdlib.h> /*标准函数库定义*/ <unistd.h> /*Unix 标准函数定义*/
<sys/types.h>
15
4
2019/12/2 Linux嵌入式操作系统 文全刚
16
4
• Tcflush(fd,queue_selector)
• 在串口重新设置后,在此之前的数据要重 新处理,处理方法取决于queue_selector:
• TCIFLUSH:刷新收到的数据但是不读
• TCOFLUSH:刷新写入的数据但是不传送
20
4
打开串口
• Linux 下串口文件是位于 /dev 下的 串口一 为 /dev/ttyS0 串口二 为 /dev/ttyS1
• 打开串口是通过使用标准的文件打开函数操作:
• 设置数据位 new_opt.c_cflag &= ~CSIZE; new_opt.c_cflag |= CS8;
2019/12/2 Linux嵌入式操作系统 文全刚
11
4
2019/12/2 Linux嵌入式操作系统 文全刚
Linux串口应用开发
22 振铃指示
RI
DTE←DCE 表示 DCE 与线路接通,出现振铃 3
串口程序设计
IT Education & Training
• S3C2410X内部具有两个独立的UART控制器,每个 控制器都可以工作在Interrupt模式或者DMA模式。 同时,每个UART均具有16字节的FIFO,支持最高 波特率230.4Kbps。
unsigned short c_oflag; /* 输出模式标志 */ unsigned short c_cflag; /* 控制模式标志*/ unsigned short c_lflag; /*区域模式标志 * unsigned char c_line; /*行控制line discipline */ unsigned char c_cc[NCC]; /* 控制特性 */ unsigned short c_iflag; /* 输入模式标志 */ };
DTE←DCE DTE←DCE
功能
DTE(数据终端设备)发送串行数据
DTE 接收串行数据
DTE 请求 DCE(数据通讯设备)将线 路切换到发送方式
DCE 告诉 DTE 线路已接通可以发送数 据
DCE 准备好
7
信号地
8
载波检测
信号公共地 DCD DTE←DCE 表示 DCE 接收到远程载波
20 数据终端准备好 DTR DTE→DCE DTE 准备好
设置数据位大小 首先去掉数据位中的掩码,在重新设置。
例: newtio.c_cflag &=~CSIZE; newtio.c_cflag |=CS8;
9
串口程序设计
IT Education & Training
linux串口编程原理
linux串口编程原理摘要:一、引言二、Linux串口编程基本概念1.串口通信原理2.Linux串口设备命名规则3.串口编程基本流程三、Linux串口编程实战1.打开和关闭串口设备2.串口数据传输1.发送数据2.接收数据3.异步通信与波特率四、Linux串口编程高级话题1.错误检测与处理2.高级I/O操作3.并发控制五、总结与展望正文:一、引言在Linux系统中,串口编程是一项非常实用的技能。
无论是在嵌入式系统,还是在传统的服务器应用中,通过串口进行通信都能解决许多实际问题。
本文将详细介绍Linux串口编程的原理和实践,帮助你更好地掌握这一技能。
二、Linux串口编程基本概念1.串口通信原理串口通信是一种基于串行数据传输的技术,它将数据位逐位地传输,相比于并行通信,具有传输距离远、抗干扰性强等优点。
在Linux系统中,串口通信主要通过设备文件实现。
2.Linux串口设备命名规则Linux中的串口设备命名遵循一定的规则,通常以“/dev/ttySx”或“/dev/ttyUSBx”的形式表示。
其中,x代表设备编号,如ttyS0、ttyUSB0等。
3.串口编程基本流程Linux串口编程的基本流程如下:1) 打开串口设备2) 设置串口参数,如波特率、数据位、停止位等3) 读写数据4) 关闭串口设备三、Linux串口编程实战1.打开和关闭串口设备在Linux中,可以使用`open()`、`close()`函数打开和关闭串口设备。
例如:```cint fd = open("/dev/ttyS0", O_RDWR);if (fd < 0) {perror("Open serial port error");return -1;}close(fd);```2.串口数据传输1) 发送数据可以使用`write()`函数将数据发送到串口设备:```cssize_t len = write(fd, data, strlen(data));if (len < 0) {perror("Write serial port error");return -1;}```2) 接收数据可以使用`read()`函数从串口设备读取数据:```cssize_t len = read(fd, data, BUF_SIZE);if (len < 0) {perror("Read serial port error");return -1;}```3.异步通信与波特率在实际应用中,通常需要处理异步通信,可以使用`tcgetattr()`、`tcsetattr()`函数设置和获取串口设备属性。
linux实现的串口通信服务器的结构
linux实现的串口通信服务器的结构Linux 实现的串口通信服务器的结构1. 引言串口通信在嵌入式系统中非常常见,它可以用于与外部设备进行通信,例如传感器、无线模块、打印机等等。
为了实现串口通信,我们需要一个串口服务器来处理串口数据的接收和发送。
在本文中,我们将详细介绍在Linux 系统上实现串口通信服务器的结构和步骤。
2. 串口通信基础在开始了解串口通信服务器的结构之前,我们需要了解一些串口通信的基础知识。
串口是一种通信接口,它通过串行的方式传输数据,与并行传输相对。
串口通信的一般步骤包括:打开串口、配置串口参数、接收和发送数据,最后关闭串口。
3. Linux 系统的串口设备在Linux 系统中,串口设备通常是通过设备文件来表示的,例如"/dev/ttyS0" 或"/dev/ttyUSB0"。
在访问串口设备之前,我们需要打开该设备文件,这样我们才能读写数据。
打开串口设备可以使用系统调用函数open(),它接受一个设备文件名和一些选项作为参数。
4. 配置串口参数一旦我们打开了串口设备,接下来就需要配置串口的通信参数,例如波特率、数据位、停止位、奇偶校验等。
在Linux 系统中,我们可以使用系统调用函数tcgetattr() 和tcsetattr() 来获取和设置串口的参数。
我们可以使用结构体termios 来表示串口的参数。
5. 接收数据一旦串口设备配置完成,我们就可以开始接收数据了。
在Linux 系统中,我们可以使用系统调用函数read() 来从串口设备中读取数据。
read() 函数需要一个缓冲区和一个长度作为参数,它会尝试从串口设备中读取指定长度的数据,并将读取到的数据存储在缓冲区中。
6. 发送数据除了接收数据,串口通信还涉及到数据的发送。
在Linux 系统中,我们可以使用系统调用函数write() 来向串口设备发送数据。
write() 函数需要一个缓冲区和一个长度作为参数,它会将缓冲区中的数据发送到串口设备中。
linux c语言编写modbus rtu例程

linux c语言编写modbus rtu例程如何在Linux下使用C语言编写Modbus RTU例程。
第一步:了解Modbus RTU协议Modbus RTU是一种用于串行通信的简单且广泛使用的协议,主要用于连接工业自动化设备。
该协议定义了一种在不同设备之间进行数据通信的标准方法。
Modbus RTU协议使用二进制编码来传输数据,其数据格式包括起始位、数据位、停止位和校验位。
第二步:安装C语言开发环境在Linux中使用C语言开发Modbus RTU例程之前,需要安装相应的开发环境。
常见的C语言开发环境包括GCC编译器和Make工具。
可以使用以下命令来检查是否安装了GCC编译器和Make工具:gcc -vmake -v如果显示相应的版本信息,则表示已经安装了开发环境。
如果没有安装,可以使用以下命令来安装:sudo apt-get install build-essential第三步:选择一个Modbus库在开始编写Modbus RTU例程之前,需要选择一个Modbus库来简化开发过程。
在Linux环境下,有许多可用的Modbus库可供选择,如libmodbus和libmodbus-ocaml等。
可以根据自己的需求选择合适的库。
以libmodbus为例,首先需要下载并安装该库。
可以使用以下命令来下载和安装libmodbus:git clonecd libmodbus./autogen.sh./configuremakesudo make install安装完成后,可以使用以下命令来检查是否安装成功:pkg-config cflags libs libmodbus如果显示相应的编译选项和链接选项,则表示安装成功。
第四步:编写Modbus RTU例程在安装好Modbus库之后,可以开始编写Modbus RTU例程。
首先,需要包含必要的头文件:c#include <stdio.h>#include <modbus.h>接下来,需要初始化一个Modbus连接:cmodbus_t *ctx;ctx = modbus_new_rtu("/dev/ttyUSB0", 9600, 'N', 8, 1);if (ctx == NULL) {fprintf(stderr, "Unable to create the libmodbus context\n");return -1;}在这个例程中,我们使用/dev/ttyUSB0作为串口设备,并设置波特率为9600,数据位为8,停止位为1,无校验位。
基于linux和Qt的串口通信调试器调的设计及应用

I T 技 术1 Qextserialport 类介绍在Q t类库中并没有特定的串口基础类,现在很多人使用的是第三方写的qexts erialport类,它是一个跨平台的串口类,可以很方便地在Qt中对串口进行读写操作。
本文也使用了该类。
文件下载地址:/projects/qex tserialport/files/下载到的文件名为qextserialport-1.2 win-alpha。
在linux平台中,我们只需用到其中的四个文件:qextserialbase.cpp和qext serialbase.h以及posix_qextserialport.cpp和posix_qextserialport.h。
其中前两个文件定义了一个QextSerialBase 类,它提供了操作串口所必需的一些变量和函数等;后两个文件定义了一个Posix_QextSerialPort 类, Posix_QextSerialPort类添加了Linux平台下操作串口的一些功能。
2 串口的基本设置串口的基本参数在posix_qextserialpor t.cpp文件里的构造函数中进行设置,它的最后一个构造函数:Posix_QextSerialPort::Posix_QextSer ialPort(const QString & name, const Por tSettings&settings, QextSerialBase::Query Mode mode)它共有3个参数,第一个是串口名,第二个是对串口参数的基本设置,第三个是读取串口的方式。
对于第二个参数Por tSettings的类型,在qextserialbase.h文件中有一个结构体:struct PortSettings 这个结构体里定义了串口初始化的各个参数。
而对于BaudRateType等枚举类型,同样在qex tserialbase.h文件中有定义。
浅谈linux下的串口通讯开发
浅谈linux下的串⼝通讯开发串⾏⼝是计算机⼀种常⽤的接⼝,具有连接线少,通讯简单,得到⼴泛的使⽤。
常⽤的串⼝是RS-232-C接⼝(⼜称EIA RS-232-C)它是在1970年由美国电⼦⼯业协会(EIA)联合贝尔系统、调制解调器⼚家及计算机终端⽣产⼚家共同制定的⽤于串⾏通讯的标准。
串⼝通讯指的是计算机依次以位(bit)为单位来传送数据,串⾏通讯使⽤的范围很⼴,在嵌⼊式系统开发过程中串⼝通讯也经常⽤到通讯⽅式之⼀。
Linux对所有设备的访问是通过设备⽂件来进⾏的,串⼝也是这样,为了访问串⼝,只需打开其设备⽂件即可操作串⼝设备。
在linux系统下⾯,每⼀个串⼝设备都有设备⽂件与其关联,设备⽂件位于系统的/dev⽬录下⾯。
如linux下的/ttyS0,/ttyS1分别表⽰的是串⼝1和串⼝2。
下⾯来详细介绍linux下是如何使⽤串⼝的:1. 串⼝操作需要⽤到的头⽂件#include /*标准输⼊输出定义*/#include /*标准函数库定义*/#include /*Unix 标准函数定义*/#include#include#include /*⽂件控制定义*/#include /*POSIX 终端控制定义*/#include /*错误号定义*/#include /*字符串功能函数*/2. 串⼝通讯波特率设置波特率的设置定义在,其包含在头⽂件⾥。
常⽤的波特率常数如下:B0-------à0 B1800-------à1800B50-----à50 B2400------à2400B75-----à75 B4800------à4800B110----à110 B9600------à9600B134----à134.5 B19200-----à19200B200----à200 B38400------à38400B300----à300 B57600------à57600B600----à600 B76800------à76800B1200---à1200 B115200-----à115200假定程序中想要设置通讯的波特率,使⽤cfsetispeed( )和cfsetospeed( )函数来操作,获取波特率信息是通过cfgetispeed()和cfgetospeed()函数来完成的。
linux系统串口编程实例

linux系统串⼝编程实例在嵌⼊式开发中⼀些设备如WiFi、蓝⽛......都会通过串⼝进⾏主机与从机间通信,串⼝⼀般以每次1bit位进⾏传输,效率相对慢。
在linux系统下串⼝的编程有如下⼏个步骤,最主要的是串⼝初始化!1.打开串⼝ open(“/dev/XXXX”, O_NOCTTY|O_RDWR)2.初始化串⼝见下⾯实例。
3.对串⼝读写操作4.关闭串⼝#include <termios.h>/***fd: 串⼝描述符*nbits: 数据位*nvent: 奇偶校验位*nspeed: 波特率*nstop:停⽌位**/bool set_opt(int fd, int nbits, char nevent, int nspeed, int nstop){struct termios newtio, oldtio;//检测是否为终端设备描述符if (!isatty(fd)) {perror("is not a termios device");return false;}//得到此描述符之前的属性if (tcgetattr(fd, &oldtio) != 0) {perror("tcgetattr error");return false;}//CLOCAL:忽略调制解调器状态⾏//CREAD:开启接受装置newtio.c_cflag |= CLOCAL | CREAD;//清空字符长度位newtio.c_cflag &= ~CSIZE;//设置数据位switch(nbits) {case 5:newtio.c_cflag |= CS5;break;case 6:newtio.c_cflag |= CS6;break;case 7:newtio.c_cflag |= CS7;break;case 8:newtio.c_cflag |= CS8;break;}//设置奇偶校验位switch(nevent) {case 'O':newtio.c_cflag |= PARENB;newtio.c_cflag |= PARODD;newtio.c_iflag |= (INPCK | ISTRIP);break;case 'E':newtio.c_cflag |= PARENB;newtio.c_cflag &= ~PARODD;newtio.c_iflag |= (INPCK | ISTRIP);break;case 'N':newtio.c_cflag &= ~PARENB;break;}//设置波特率switch(nspeed) {case 115200:cfsetospeed(&newtio, B115200);cfsetispeed(&newtio, B115200);break;case 9600:cfsetospeed(&newtio, B9600);cfsetispeed(&newtio, B9600);break;case 2400:cfsetospeed(&newtio, B2400);cfsetispeed(&newtio, B2400);break;case 4800:cfsetospeed(&newtio, B4800);cfsetispeed(&newtio, B4800);break;case 460800:cfsetospeed(&newtio, B460800);cfsetispeed(&newtio, B460800);break;default:cfsetispeed(&newtio, B9600);cfsetospeed(&newtio, B9600);break;}//设置停⽌位if (1 == nstop) {newtio.c_cflag &= ~CSTOPB;} else if (2 == nstop) {newtio.c_cflag |= CSTOPB;}//MIN==0, TIME==0 如果有数据可⽤,则read最多返回所要求的字节数, //如果⽆数据可⽤,则read⽴即返回0newtio.c_cc[VTIME] = 0;newtio.c_cc[VMIN] = 0;//冲洗输⼊缓冲区tcflush(fd, TCIFLUSH);//为终端设备设置属性if (tcsetattr(fd, TCSANOW, &newtio) != 0) {perror("comX set error");return false;}return true;}。
嵌入式Linux串口应用开发1(精)

14:08
Linux嵌入式操作系统 文全刚
18/29
串行口功能模块及其工作工程
14:08
Linux嵌入式操作系统 文全刚
19/29
UART的特殊功能寄存器
每个串口通道共有各种寄存器11个,它们分别 是:2 个控制寄 存器(ULCON0,ULCON1;UCON0, UCON1), 一 个 FIF0 控 制 寄 存 器 ( UFCON0, UFCON1), 一 个 串 口 调 制 解 调 控 制 寄 存 器 (UMCON0,UMCON1),一个发送/接受状态寄存器 ( UTRSTA0,UTRSTA1), 一 个 串 口 发 送 错 误 状 态 寄存器 (UERSTA0,UERSTA0),一个FIF0 状态寄 存 器 ( UFSTAT0,UFSTAT1), 一 个 串 口 调 制 解 调 状 态 寄 存 器 ( UMSTAT0,UMSTAT1), 一 个 数 据 发 送 寄 存 器 ( UTXH0,UTXH1), 一 个 数 据 接 收 寄 存 器 ( URXH0,URXH1) 和 一 个 波 特 率 产 生 控 制 寄 存 器(UBRDIV0,UBRDIV1)。
输入
在TxD和RxD上
逻辑1(MARK)=-3V~-15V 逻辑0(SPACE)=+3~+15V
在RTS、CTS、DSR、DTR 和DCD等控制线上
信号有效(接通,ON状态, 正电压)=+3V~+15V
信号无效(断开,OFF状态, 负电压)=-3V~-15V
14:08
Linux嵌入式操作系统 文全刚
7/29
二 RS232串行通信接口
• DB9和DB25的常用信号脚说明 • RS232C串口通信接线方法(三线制) • RS-232串行接口标准简介
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
19
串口程序设计
IT Education & Training
• 串口参数设定和文件操作的几个重要函数
函数名
描述
open
打开串口文件
tcgetattr 保存当前串口设置
tcsetattr 设置串口参数
read 从串口中读数据
tcflush 清除串口缓冲区
write 向串口中写数据
close
关闭串口文件
*/
/*CRTSCTS:硬体流量控制
*/
/*CS8:8n1 (8 位,无校验位,1 个终止位) */
/*CLOCAL:本地连线,没有主机控制功能 */
/*CREAD: 只能接收字元
*/
newtio.c_cflag = BAUDRATE | CRTSCTS | CS8 | CLOCAL | CREAD;
发送数据
2
串口程序设计
• 串口通讯电缆接线方式
IT Education & Training
3
串口程序设计
• 串口的引脚说明
IT Education & Training
序号 信号名称
2
发送数据
3
接收数据
4
请求发送
符号 TXD RXD RTS
5
允许发送
CTS
6
数据设备准备好 DSR
流向 DTE→DCE DTE←DCE DTE→DCE
• newtio.c_iflag |=(INPCK | ISTRIP); • newtio.c_cflag &=~ PARODD; • newtio.c_cflag |= PARENB;
11
串口程序设计
• 6、设置参数的实现示例:
IT Education & Training
设置停止位 下面是设置停止位为1的代码: newtio.c_cflag &= ~CSTOPB;
设置数据位大小 首先去掉数据位中的掩码,在重新设置。
例: newtio.c_cflag &=~CSIZE; newtio.c_cflag |=CS8;
10
串口程序设计
IT Education & Training
• 5、设置参数的实现示例: 设置奇校验位 newtio.c_iflag|=(INPCK | ISTRIP)//INPCK奇偶校 验使能;ISTRIP 除去奇偶校验位 newtio.c_cflag |= PARODD;//奇校验 newtio.c_cflag |= PARENB;//校验位使能 课堂练习一:设置偶校验位
串口程序设计
IT Education & Training
• 串口概述
用户常见的数据通信的基本方式可分为
(1)并行通信:用多条数据线将各位同时传送
特点:传送速度快,适用于短距离、速度要求高的场合。
(2)串行通信:用一条数据线一位位的顺序传送
特点:成本低,适用于远距离、速度慢的场合。
串行口是计算机一种常用接口。常用串口是 RS-232-C 接口 (又称 EIA RS-232-C),是在 1970 年由美国电子工业协会 (EIA)联合贝尔系统、 调制解调器厂家及计算机终端生产 厂家共同制定的用于串行通讯的标准。
设置波特率
输入波特率设置:cfsetispeed 输出波特率设置:cfsetospeed
例: cfsetispeed(&newtio,B19200); /*设置为 19200Bps*/ cfsetospeed(&newtio,B19200);
9
串口程序设计
• 4、设置参数的实现示例:
IT Education & Training
6
串口程序设计
• 1、设置参数的实现示例:
IT Education & Training
tcgetattr(fd,&oldtio),该函数得到与fd指向对象 的相关参数,并将他们保存于oldtio引用的结构中。
保存原先配置 if(tcgetattr(fd,&oldtio)!=0) { Perror(“error ”); Return -1; }
DTE←DCE DTE←DCE
功能
DTE(数据终端设备)发送串行数据
DTE 接收串行数据
DTE 请求 DCE(数据通讯设备)将线
路切换到发送方式 DCE 告诉 DTE 线路已接通可以发送数
据 DCE 准备好
7
信号地
8
载波检测
信号公共地 DCD DTE←DCE 表示 DCE 接收到远程载波
20 数据终端准备好 DTR DTE→DCE DTE 准备好
读取串口数据 char buff[1024]; int Len; int readByte; readByte = read( fd , buff, Len);
IT Education & Training
18
串口程序设计
• 关闭串口
关闭串口就是关闭文件 close(fd);
IT Education & Training
/*不使用分割字元组的计时器*/
tcflush(fd, TCIFLUSH);
/*清除串口缓冲区*/
tcsetattr(fd,TCSANOW,&newtio); /*设置串口新参数*/
17
串口程序设计
• 读写串口
发送数据 char buffer[1024]; int Length; int nByte; nByte = write (fd , buffer ,Length)
举例 open("/dev/ttyS0",O_RDWR)
tcgetattr(fd,&oldtio) tcsetattr(fd,TCSANOW,&newtio)
read(fd, buff, Len) tcflush(fd, TCIFLUSH); write(fd, buffer ,Length)
close(fd);
TCSAFLUSH:改变的配置在所有写入fd引用对象的输 出都被结束后生效,所有已接受但未读入的输入都在改 变发生前丢弃
例如:想使改变立即生效
tcsetattr(fd,TCSANOW,&newtio);
14
串口程序设计
IT Education & Training
• 串口操作需要的头文件
#include <stdio.h> /*标准输入输出定义*/ #include <stdlib.h> /*标准函数库定义*/ #include <unistd.h> /*Unix 标准函数定义*/ #include <sys/types.h> /*定义系统类型 */ #include <sys/stat.h> /*定义文件信息*/ #include <fcntl.h> /*文件控制定义*/ #include <termios.h> /*终端控制定义*/ #include <errno.h> /*错误号定义*/
}
• 设置串口
串口的设置主要是设置 struct termios 结构体的各成员值 。
16
串口程序设计
IT Education & Training
• 设置参数的实现示例:
tcgetattr(fd,&oldtio); /*储存当前串口设定
*/
/*控制标志设定,含义如下:
*/
/*BAUDRATE:设定 bps 的速度
newtio.c_iflag = IGNPAR;
/*忽略奇偶校验位*/
newtio.c_oflag = 0;
/* Raw 模式输出*/
newtio.c_lflag = 0;
/*非标准型输入,不回应*/
newtio.c_cc[VMIN]=1;
/*在读取到 1 个字元前先停止*/
newtio.c_cc[VTIME]=0;
设置最少字符和等待时间 newtio.c_cc[VTIME] =0; newtio.c_cc[VMIN]=0;
12
串口程序设计
IT Education & Training
• 7、设置参数的实现示例: 处理要写入的引用对象
tcflush(fd,queue_selector); queue_selector取值如下: TCIFLUSH:刷新收到的数据但不读取 TCOFLUSH:刷新写入的数据但是不传送 TCIOFLUSH:同时刷新收到的数据但是不读,并且 刷新写入的数据但是不传送 例如采用第三种方法:
完整实例
20
Thank you
谢谢
IT Education & Training
21
tcflush(fd,TCIOFLIT Education & Training
• 8、设置参数的实现示例: 激活配置
tcsetattr(fd,OPTION,&newtio); OPTION的选项如下: TCSANOW:改变的配置立即生效 TCSADRAIN:改变的配置在所有写入fd的输出结束后 生效
22 振铃指示
RI
DTE←DCE 表示 DCE 与线路接通,出现振铃 4
串口程序设计
IT Education & Training
• S3C2410X内部具有两个独立的UART控制器,每个 控制器都可以工作在Interrupt模式或者DMA模式。 同时,每个UART均具有16字节的FIFO,支持最高 波特率230.4Kbps。
15
串口程序设计
• 打开串口
在 Linux 下串口文件位于 /dev 下 串口一 为 /dev/ttyS0 串口二 为 /dev/ttyS1