ADS异常处理
第ADS开发环境和ARM汇编语言

AXD可以在Windows 和UNIX下,进行程序的调试。 它为用C,C++,和汇编语言编写的源代码提供了一个全 面的Windows 和UNIX 环境。
无需对armlib和cpplib这两个库路径分开指明,链接器会 自动从用户所指明的库路径中找出这两个子目录。
7
3.1.3GUI开发环境(Code Warrior和AXD)
CodeWarrior for ARM是一套完整的集成开发工具,充分 发挥了ARM RISC 的优势, 使产品开发人员能够很好的应 用尖端的片上系统技术. 该工具是专为基于ARM RISC的 处理器而设计的, 它可加速并简化嵌入式开发过程中的每 一个环节,使得开发人员只需通过一个集成软件开发环境 就能研制出ARM产品,在整个开发周期中,开发人员无需 离开CodeWarrior开发环境, 因此节省了在操做工具上花的 时间,使得开发人员有更多的精力投入到代码编写上来,
助记符
指令功能描述
SWI
软件中断指令
SWP
交换指令
TEQ
相等测试指令
TST
位测试指令
27
ARM微处理器指令的条件域
指令的条件域
当处理器工作在ARM状态时,几乎所有的指令均根据CPSR 中条件码的状态和指令的条件域有条件的执行。当指令的 执行条件满足时,指令被执行,否则指令被忽略。
每一条ARM指令包含4位的条件码,位于指令的最高4位 [31:28]。条件码共有16种,每种条件码可用两个字符表 示,这两个字符可以添加在指令助记符的后面和指令同时 使用。例如,跳转指令B可以加上后缀EQ变为BEQ表示“相 等则跳转”,即当CPSR中的Z标志置位时发生跳转。
2024版ADS设计实验教程微波滤波器的设计制作与调试

•引言•微波滤波器基本原理•ADS 软件在微波滤波器设计中的应用•微波滤波器制作工艺流程•调试技巧与常见问题解决方案•实验案例分析与讨论•总结与展望目录01引言微波滤波器概述微波滤波器是一种用于控制微波频率响应的二端口网络,广泛应用于无线通信、雷达、卫星通信等领域。
微波滤波器的主要功能是允许特定频率范围内的信号通过,同时抑制其他频率范围的信号,从而实现信号的选频和滤波。
微波滤波器的性能指标包括插入损耗、带宽、带内波动、带外抑制等,这些指标直接影响着通信系统的性能。
设计制作与调试重要性设计是微波滤波器制作的首要环节,良好的设计能够确保滤波器的性能指标满足系统要求。
制作是将设计转化为实物的过程,制作精度和质量直接影响着滤波器的最终性能。
调试是对制作完成的滤波器进行性能调整和优化,使其达到最佳工作状态的过程。
本教程旨在介绍微波滤波器的设计、制作与调试过程,帮助读者掌握相关知识和技能。
教程内容包括微波滤波器的基本原理、设计方法、制作流程和调试技巧等。
通过本教程的学习,读者将能够独立完成微波滤波器的设计、制作与调试,为实际工程应用打下基础。
教程目的和内容02微波滤波器基本原理低通滤波器高通滤波器带通滤波器带阻滤波器微波滤波器分类工作原理及性能指标工作原理性能指标常见类型微波滤波器特点集总参数滤波器分布参数滤波器陶瓷滤波器晶体滤波器03ADS软件在微波滤波器设计中的应用ADS软件简介及功能模块ADS(Advanced Design System)是一款领先的电子设计自动化软件,广泛应用于微波、射频和高速数字电路的设计、仿真与优化。
ADS软件包含多个功能模块,如原理图设计、版图设计、电磁仿真、系统级仿真等,可满足不同设计阶段的需求。
ADS软件支持多种微波滤波器类型的设计,如低通、高通、带通、带阻等,具有强大的设计能力和灵活性。
微波滤波器设计流程确定滤波器类型和性能指标根据实际需求选择合适的滤波器类型,并确定滤波器的性能指标,如中心频率、带宽、插入损耗、带外抑制等。
ADS实验调试方法
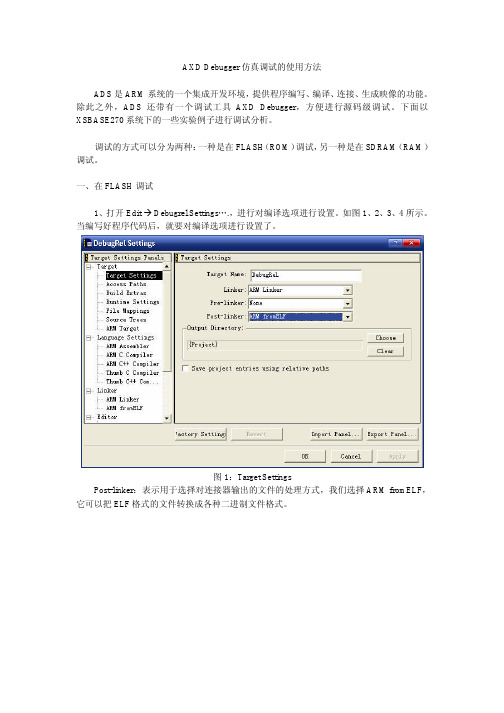
图 25:打开 AXD Debugger
选中 System ViewsCommand Line Interface,输入命令:obey x:\pxa270.ini,X 表示盘 符。这样可以实现对内存的初始化操作。
执行 FileOpen Image,选择要下载的映像文件。如图 26、27 所示:
图 24:修改 RO Base 2、执行 ProjectMake ,也可以直接用快捷键 F7 进行编译、连接生成映像文件。 3、连接好仿真器,如果是 Multi-ICE ARM 仿真器,需要启动 Multi-ICE Server。 4、下载映像到 SDRAM 中,然后进行调试。首先打开 AXD Debugger,如图 25 所示:
图 22:处理器属性 清除掉 Vector cath 和 Semihosting,如图 23 所示:
图 23:清除 Vector cath 和 Semihosting
二、在 SDRAM 调试 SDRAM 调试是先把映像文件下载到 SDRAM 里,然后进行调试。需要注意的地方,产 生中断的实验,如外部中断、定时器中断实验不能在 SDRAM 里面调试,因为当中断发生 时,程序计数器会跳到中断向量表 0x18 处执行中断服务子程序,而系统是从 0xa0000000 开始执行的,所以就会出现未定义指令异常中止退出。 SDRAM 调试基本上与 FLASH 的设置相同,不过操作的方式就有所不同。下面是 SDRAM 调试的步骤: 1、设置编译、连接、生成映像文件的选项,大体与 FLASH 调试相同,只需修改一个 地方,就是 RO Base 的值,如图 24 所示,就是修改为 0xa0000000。
图 3:ARM Link 的 Options 设置 Options 中的 Image entry point 表示映像的入口点 (地址) , boot.o(boot)表示系统从目标
ADS异常处理
0x1C 0x18 0x14 0x10 0x0C 0x08 0x04 0x00
FIQ IRQ (Reserved) Data Abort Prefetch Abort
Software Interrupt Undefined Instruction
这将导致: 这将导致:
函数所有用到的寄存器被保护 如果可能, 任何远程调用所使用的其他寄存器也被保护 函数退出使用正确的返回指令(修正 pc = lr-4 并从 spsr恢复cpsr)
__irq 仅仅可在 armcc中使用 中使用. 中使用
可是被__irq 函数调用的子程序可以用 tcc编译.
test
从数据异常( 从数据异常 Data Abort)返回 返回
在特权模式不仅仅更新PC, 在特权模式不仅仅更新 ,而且 拷贝SPSR 到 CPSR 拷贝
test
SUBS pc,lr,#8
之前被压栈的话使用LDM " 如果 LR之前被压栈的话使用 之前被压栈的话使用 ^" "
LDMFD sp!,{pc}^
Output without __irq
STMFD sp!,{r4,lr} MOV r4,#0x80000000 LDR r0,[r4,#0] CMP r0,#1 LEQ int_handler_1 MOV r0,#0 STR r0,[r4,#4] LDMFD sp!,{r4,pc}
Output with __irq test
异常处理
T
H
E
A
R
C
H
I
T
E
ADS交互工作
在一个应用中,速度关键的部分用ARM代码实现是不错的
一些函数只能用 ARM 指令实现, e.g.
存取 CPSR (使能/禁止中断和状态的改变) 操作协处理器
异常处理
异常处理时自动进入 ARM 状态,但统要求主程序用 Thumb 代码实现
独立的 Thumb 程序也需要一个ARM 的汇编程序头来切换,并调用Thumb 程序
Adding AT veneer (12 bytes) for call to '_printf’ from Thumb_to_ARM.o(.text) Adding TA veneer (12 bytes) for call to 'arm_function’ from thumbmain.o(.text)
保存返回地址到寄存器(LR) 跳转到对应的子程序地址
调用实现通常只需要一个指令: 调用实现通常只需要一个指令 BL func2 返回实现通常只需从 LR 恢复 PC: MOV pc,lr
func1 void func1 (void) { : func2(); : }
. . BL . . func2
func2
导出自己的符号, e.g. EXPORT ThumbSub 使用 BX 实现返回
指令调用子程序. 主调程序使用 BL 指令调用子程序.
Note: AREA 将包含: 将包含
AREA Thumb,CODE,READONLY,INTERWORK
如果如此, 将警告: 如果如此, armasm 将警告 INTERWORK area directive is obsolete. Continuing as if -apcs /inter selected.
ARM嵌入式系统开发与应用课后题答案与习题
课后题答案:第一章1.写出下列英文缩写的英文原文及中文含义。
RAM随机存储器 DRAM动态随机存储器 ROM只读存储器PROM可编程只读存储器 EPROM可插除可编程只读存储器 CANCAN总线RTOS实时操作系统 SOPC片上可编程系统 ICE硬件调试器 FI快速终端请求EEPROM电可插除可编程只读存储器 API应用程序接 DMA直接内存存取RISC精简指令集计算机 SPI串行万维指令 MMU存储管理单元UART异步接受发送装置 ARM先进RISC存储器 SWI软件终端指令2、什么是嵌入式系统? P3嵌入式系统是用于检测、控制、辅助、操作机械设备的装置。
以应用为中心,一计算机技术为基础,软硬件可裁剪,适应应用系统对功能、可靠性、成本、体积和功耗等严格要求的专用计算机系统。
3、是比较嵌入式系统与通用PC的区别。
P3(1)嵌入式系统是专用的计算机系统,而PC是通用的计算机系统。
(2)技术要求不同,通用PC追求高速、海量的数据运算;嵌入式要求对象体系的智能化控制。
(3)发展方向不同,PC追求总线速度的不断提升,存储容量不断扩大;嵌入式追求特定对象系统的智能性,嵌入式,专用性。
4、嵌入式体统有哪些部分组成?简单说明各部分的功能与作用(1)硬件层是整个核心控制模块(由嵌入式微处理器、存储系统、通信模块、人机接口、其他I/O 接口以及电源组成),嵌入式系统的硬件层以嵌入式微处理器为核心,在嵌入式微处理器基础上增加电源电路、时钟电路、和存储器电路(RAM和ROM等),这就构成了一个嵌入式核心控制模块,操作系统和应用程序都可以固化在ROM中。
(2)中间层把系统软件与底层硬件部分隔离,使得系统的底层设备驱动程序与硬件无关。
一般包括硬件抽象层(Hardware Abstract Layer,HAL)和板级支持包(Board Support Package,BSP)。
(3)软件层由实时操作系统(Real Time Operating System,RTOS)、文件系统、图形用户接口(Graphical User Interfaces,GUI)、网络组件组成。
嵌入式ADS实验指导书
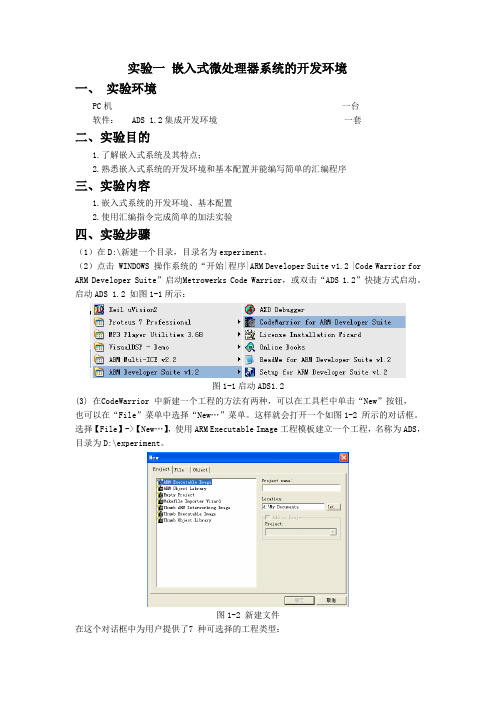
实验一嵌入式微处理器系统的开发环境一、实验环境PC机一台软件: ADS 1.2集成开发环境一套二、实验目的1.了解嵌入式系统及其特点;2.熟悉嵌入式系统的开发环境和基本配置并能编写简单的汇编程序三、实验内容1.嵌入式系统的开发环境、基本配置2.使用汇编指令完成简单的加法实验四、实验步骤(1)在D:\新建一个目录,目录名为experiment。
(2)点击 WINDOWS 操作系统的“开始|程序|ARM Developer Suite v1.2 |Code Warrior for ARM Developer Suite”启动Metrowerks Code Warrior,或双击“ADS 1.2”快捷方式启动。
启动ADS 1.2 如图1-1所示:图1-1启动ADS1.2(3) 在CodeWarrior 中新建一个工程的方法有两种,可以在工具栏中单击“New”按钮,也可以在“File”菜单中选择“New…”菜单。
这样就会打开一个如图1-2 所示的对话框。
选择【File】->【New…】,使用ARM Executable Image工程模板建立一个工程,名称为ADS,目录为D:\experiment。
图1-2 新建文件在这个对话框中为用户提供了7 种可选择的工程类型:1)ARM Executabl Image:用于由ARM 指令的代码生成一个ELF 格式的可执行映像文件;2)ARM Object Library:用于由ARM 指令的代码生成一个armar 格式的目标文件库;3)Empty Project:用于创建一个不包含任何库或源文件的工程;4)Make Wizard:用于将Visual C 的nmake 或GNU make 文件转入到CodeWarrior IDE 工程文件;5)Thumb ARM Executable Image:用于由ARM 指令和Thumb 指令的混和代码生成一个可执行的ELF 格式的映像文件;6)Thumb Executable image:用于由Thumb 指令创建一个可执行的ELF 格式的映像文件;7)Thumb Object Library:用于由Thumb 指令的代码生成一个armar 格式的目标文件库。
理解ARM启动代码(ADS)
理解启动代码(ADS)所谓启动代码,就是处理器在启动的时候执行的一段代码,主要任务是初始化处理器模式,设置堆栈,初始化变量等等.由于以上的操作均与处理器体系结构和系统配置密切相关,所以一般由汇编来编写.具体到S64,启动代码分成两部分,一是与ARM7TDMI内核相关的部分,包括处理器各异常向量的配置,各处理器模式的堆栈设置,如有必要,复制向量到RAM,以便remap之后处理器正确处理异常,初始化数据(包括RW与ZI),最后跳转到Main.二是与处理器外部设备相关的部分,这和厂商的联系比较大.虽然都采用了ARM7TDMI的内核,但是不同的厂家整合了不同的片上外设,需要不同的初始化,其中比较重要的是初始化WDT,初始化各子系统时钟,有必要的话,进行remap.这一部分与一般控制器的初始化类似,因此,本文不作重点描述.在进行分析之前,请确认如下相关概念:S64片上FLASH起始于0x100000,共64kB,片上RAM起始于0x200000,共16kB.S64复位之后,程序会从0开始执行,此时FLASH被映射到0地址,因此,S64可以取得指令并执行.显然,此时还是驻留在0x100000地址.如果使用remap命令,将会把RAM映射到0地址,同样的这时0地址的内容也只是RAM的镜像.S64的FLASH可以保证在最差情况时以30MHz进行单周期访问,而RAM可以保证在最大速度时的单周期访问.OK,以下开始分析启动代码.一,处理器异常S64将异常向量至于0地址开始的几个直接,这些是必需要处理的.由于复位向量位于0,也需要一条跳转指令.具体代码如下:RESETB SYSINIT ; ResetB UDFHANDLER ; UNDEFINEDB SWIHANDLER ; SWIB PABTHANDLER ; PREFETCH ABORTB DABTHANDLER ; DATA ABORTB . ; RESERVEDB VECTORED_IRQ_HANDLERB . ; ADD FIQ CODE HEREUDFHANDLERB .SWIHANDLERB .PABTHANDLERB .DABTHANDLERB .请注意,B指令经汇编后会替换为当前PC值加上一个修正值(+/-),所以这条指令是代码位置无关的,也就是不管这条指令是在0地址还是在0x100000执行,都能跳转到指定的位置,而LDR PC,=???将向PC直接装载一个标号的值,请注意,标号在编译过后将被替换为一个与RO 相对应的值,也就是说,这样的指令无论在哪里执行,都只会跳转到一个指定的位置.下面举一个具体的例子来说明两者的区别:假定有如下程序:RESETB INIT 或者LDR PC,=INIT…INIT…其中RESET为起始时的代码,也就是这条代码的偏移为0,设INIT的偏移量为offset.如果将这段程序按照RO=0x1000000编译, 那么B INIT可理解为ADD PC, PC, #offset,而LDR PC,=INIT可被理解为MOV PC,#(RO+offset) .显然当系统复位时,程序从0开始运行,而0地址有FLASH的副本,执行B INIT将把PC指向位于0地址处的镜像代码位置,也即INIT;如果执行LDR PC,=INIT将会将PC直接指向位于FLASH中的原始代码.因此以上两者都能正确运行.下面将RO设置为0x200000,编译后生成代码,还是得烧写到FLASH中,也就是还是0x100000,系统复位后从0地址执行,还是FLASH的副本,此时执行B INIT,将跳到副本中的INIT位置执行,此处有对应的代码;但是如果执行LDR PC,=INIT,将向PC加载0x200000+offset,这将使得PC跳到RAM中,而此时由于代码没有复制,RAM 中的指定位置并没有代码,程序无法运行.二,处理器模式ARM的处理器可工作于多种模式,不同模式有不同的堆栈,以下设置各模式及其堆栈.预定义一些参数:MODUSR EQU 0x10MODSYS EQU 0x1FMODSVC EQU 0x13MODABT EQU 0x17MODUDF EQU 0x1BMODIRQ EQU 0x12MODFIQ EQU 0x11IRQBIT EQU 0x80FIQBIT EQU 0x40RAMEND EQU 0x00204000 ; S64 : 16KB RAMVECTSIZE EQU 0x100 ;UsrStkSz EQU 8 ; size of USR stackSysStkSz EQU 128 ; size of SYS stackSvcStkSz EQU 8 ; size of SVC stack UdfStkSz EQU 8 ; size of UDF stack AbtStkSz EQU 8 ; size of ABT stack IrqStkSz EQU 128 ; size of IRQ stack FiqStkSz EQU 16 ; size of FIQ stack修改这些值即可修改相应模式堆栈的尺寸.以下为各模式代码:SYSINIT;MRS R0,CPSRBIC R0,R0,#0x1FMOV R2,#RAMENDORR R1,R0,#(MODSVC :OR: IRQBIT :OR: FIQBIT)MSR cpsr_cxsf,R1 ; ENTER SVC MODEMOV sp,R2SUB R2,R2,#SvcStkSzORR R1,R0,#(MODFIQ :OR: IRQBIT :OR: FIQBIT)MSR CPSR_cxsf,R1 ; ENTER FIQ MODEMOV sp,R2SUB R2,R2,#FiqStkSzORR R1,R0,#(MODIRQ :OR: IRQBIT :OR: FIQBIT) MSR CPSR_cxsf,R1 ; ENTER IRQ MODE MOV sp,R2SUB R2,R2,#IrqStkSzORR R1,R0,#(MODUDF :OR: IRQBIT :OR: FIQBIT) MSR CPSR_cxsf,R1 ; ENTER UDF MODE MOV sp,R2SUB R2,R2,#UdfStkSzORR R1,R0,#(MODABT :OR: IRQBIT :OR: FIQBIT) MSR CPSR_cxsf,R1 ; ENTER ABT MODE MOV sp,R2SUB R2,R2,#AbtStkSz;ORR R1,R0,#(MODUSR :OR: IRQBIT :OR: FIQBIT) ;MSR CPSR_cxsf,R1 ; ENTER USR MODE;MOV sp,R2;SUB R2,R2,#UsrStkSzORR R1,R0,#(MODSYS :OR: IRQBIT :OR: FIQBIT)MSR CPSR_cxsf,R1 ; ENTER SYS MODEMOV sp,R2 ;三,初始化变量编译完成之后,连接器会生成三个基本的段,分别是RO,RW,ZI,并会在image中顺序摆放.显然,RW,ZI在运行开始时并不位于指定的RW位置,因此必须初始化LDR R0,=|Image$$RO$$Limit|LDR R1,=|Image$$RW$$Base|LDR R2,=|Image$$ZI$$Base|1CMP R1,R2LDRLO R3,[R0],#4STRLO R3,[R1],#4BLO %B1MOV R3,#0LDR R1,=|Image$$ZI$$Limit|2CMP R2,R1STRLO R3,[R2],#4BLO %B2四,复制异常向量由于代码于RAM运行时,有明显的速度优势,而且变量可以动态配置,因此可以通过remap将RAM映射到0,使得出现异常时ARM从RAM中取得向量.IMPORT |Image$$RO$$Base|IMPORT |Image$$RO$$Limit|IMPORT |Image$$RW$$Base|IMPORT |Image$$RW$$Limit|IMPORT |Image$$ZI$$Base|IMPORT |Image$$ZI$$Limit|COPY_VECT_TO_RAMLDR R0,=|Image$$RO$$Base|LDR R1,=SYSINITLDR R2,=0x200000 ; RAM STARTCMP R0,R1LDRLO R3,[R0],#4STRLO R3,[R2],#4BLO %B0这段程序将SYSINIT之前的代码,也就是异常处理函数,全部复制到RAM中, 这就意味着不能将RW设置为0x200000,这样会使得向量被冲掉.四,在RAM中运行如果有必要,且代码足够小,可以将代码置于RAM中运行,由于RAM中本身没有代码,就需要将代码复制到RAM中:COPY_BEGINLDR R0,=0x200000LDR R1,=RESET ; =|Image$$RO$$Base|CMP R1,R0 ;BLO COPY_END ;ADR R0,RESETADR R2,COPY_ENDSUB R0,R2,R0ADD R1,R1,R0LDR R3,=|Image$$RO$$Limit|3CMP R1,R3LDRLO R4,[R2],#4STRLO R4,[R1],#4BLO %B3LDR PC,=COPY_ENDCOPY_END程序首先取得RESET的连接地址,判断程序是否时是在RAM中运行,方法是与RAM起始地址比较,如果小于,那么就跳过代码复制.在复制代码的时候需要注意,在这段程序结束之前的代码没有必要复制,因为这些代码都已经执行过了,所以,先取得COPY_END,作为复制起始地址,然后计算其相对RESET的偏移,然后以RO的值加上这个偏移,就是复制目的地的起始地址,然后开始复制.五,开始主程序以上步骤完成,就可以跳转到main运行IMPORT MainLDR PC,=MainB .六,器件初始化主程序首先要进行器件的初始化,对S64而言,应该先初始化WDT,因为默认情况下,WDT是打开的,然后是各设备的时钟分配,最后应该remap。
4.Hive中的ODS、DWD、DWS、ADS数仓分层
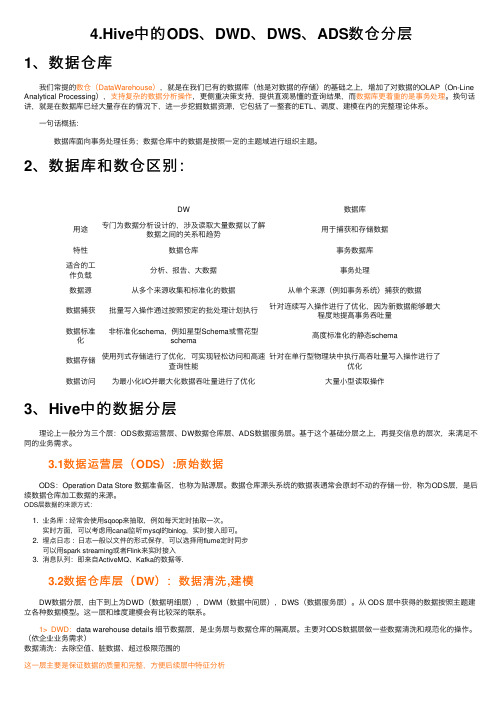
4.Hive中的ODS、DWD、DWS、ADS数仓分层1、数据仓库 我们常提的数仓(DataWarehouse),就是在我们已有的数据库(他是对数据的存储)的基础之上,增加了对数据的OLAP(On-Line Analytical Processing),⽀持复杂的数据分析操作,更侧重决策⽀持,提供直观易懂的查询结果,⽽数据库更着重的是事务处理。
换句话讲,就是在数据库已经⼤量存在的情况下,进⼀步挖掘数据资源,它包括了⼀整套的ETL、调度、建模在内的完整理论体系。
⼀句话概括: 数据库⾯向事务处理任务;数据仓库中的数据是按照⼀定的主题域进⾏组织主题。
2、数据库和数仓区别:DW数据库⽤途专门为数据分析设计的,涉及读取⼤量数据以了解数据之间的关系和趋势⽤于捕获和存储数据特性数据仓库事务数据库适合的⼯作负载分析、报告、⼤数据事务处理数据源从多个来源收集和标准化的数据从单个来源(例如事务系统)捕获的数据数据捕获批量写⼊操作通过按照预定的批处理计划执⾏针对连续写⼊操作进⾏了优化,因为新数据能够最⼤程度地提⾼事务吞吐量数据标准化⾮标准化schema,例如星型Schema或雪花型schema⾼度标准化的静态schema数据存储使⽤列式存储进⾏了优化,可实现轻松访问和⾼速查询性能针对在单⾏型物理块中执⾏⾼吞吐量写⼊操作进⾏了优化数据访问为最⼩化I/O并最⼤化数据吞吐量进⾏了优化⼤量⼩型读取操作3、Hive中的数据分层 理论上⼀般分为三个层:ODS数据运营层、DW数据仓库层、ADS数据服务层。
基于这个基础分层之上,再提交信息的层次,来满⾜不同的业务需求。
3.1数据运营层(ODS):原始数据 ODS:Operation Data Store 数据准备区,也称为贴源层。
数据仓库源头系统的数据表通常会原封不动的存储⼀份,称为ODS层,是后续数据仓库加⼯数据的来源。
ODS层数据的来源⽅式:1. 业务库 : 经常会使⽤sqoop来抽取,例如每天定时抽取⼀次。
IDS和IPS的比较

IDS和IPS的比较标签:IDS IPS 网络安全IDS和IPS的比较一、引言由于现在有了因特网,网络安保已经成了工业企业最关注的话题。
入侵检测系统(IDS)用于检测那些不需要对工业自动化控制系统(IACS)访问和操作,特别是通过网络。
它是一种专用工具,知道如何分析和解释网络流量和主机活动。
IDS的主要目标是对IACS网络检测入侵和入侵企图,让网络管理员采取适当的缓解和补救措施。
IDS不会阻止这些攻击,但会让用户知道什么时候发生了攻击。
此外,IDS把已知的攻击特征和相关的活动、流量、行为模式存储到数据库,当监测数据发现存储的特征与当前的特征或者行为非常接近时,通过比对就可以识别出来。
这时,IDS能发出警报或警示,并搜集这些破坏活动的证据。
入侵检测提供了一种识别的方法,因此可以对系统的攻击进行反应。
检测到攻击是一回事,阻止攻击则是另一回事。
这时,最高等级的IT安保行动是防止攻击和可能的灾害;而IDS往往只能带来一点点这样的功能。
因此,对入侵检测系统功能的扩展,就产生了入侵防御系统(IPS)。
在当前防御能力不足的情况下,驱动了这一新的安全产品诞生,被称为入侵防御系统。
入侵防御系统是一种网络安全设备,监控网络和系统的活动,对恶意或有害的行为可以进行实时反应,以阻止或防止这些活动带来的破坏。
IPS是基于应用内容来决定是否能对IACS进行访问,而不是像传统的防火墙,用IP地址或端口做决定。
这种系统采用的是积极的防御机制,在正常的网络信息流中检测恶意数据包并阻止其入侵,看在任何损害发生之前自动阻断恶意流量,而不是简单地提出警报,或者在恶意的有效载荷已交付之后再动作。
二、入侵检测系统IDS对网络信息进行分析,发现恶意活动时就立即报警。
在攻击开始后他们一般都能够发出特殊报文复位TCP连接,有些甚至可以与防火墙系统连接,马上重写防火墙的规则集。
IDS有两种基本类型,即特征型和启发型。
运行在工作站上的IDS被称为主机入侵检测系统(HIDS),而那些独立在网络上运行的设备被称为网络入侵检测系统(NIDS)。
品质异常分析与预防(超完善)

No
-
8
提出报告
ቤተ መጻሕፍቲ ባይዱ
改善进行/ 改善证据
FACA Report (Normal) 8D Report
9
结果确认
改善报告
-
10
报告整合
11
回复客户
12
结案
讨论: a) 怎么对策“客户抱怨”? b) 怎样处理“客户退货”? c) 怎样应对“客户验厂”? d) 怎样调查“客户满意”?
FACA Report (Normal) 8D Report 客诉登记表
Y
在 ERP 进行过账处理
Kunshan Myzy Technology Co., Ltd
四、品质异常相关处理流程
Dept Step 制造
产线正常生产
品保
工程
SQE
仓库
Key Point
Form
制程发现异常
*制程异常,QC开立异常处理单 *保留不良品,记录不良数据 不良品
异常处理单
良品
异常判定
*依客户由ENG/QE要求进行判定 *电子方面由EE进行判定
NMRB
品保
不合格品处理 联络单 NMRB IQC 报表
整理与记录
特采
退货
重工/挑选
Y
仓库
进料验收单
入库
IQC 报表 讨论: 进料检验报告 a) 所有物料都检验吗? 依“文件数据与记录管制 不合格品处理 程序”执行 b) 急料可以免验吗? 联络单 NMRB 外箱粘贴检验标签 c) IQC检验不合格时,是否一定 IQC 报表 退货? 粘贴检验标签 进料验收单 d) 进行不合格的责任一定是供应 商的吗?
How 方法
5W2H
Who 何人
ADS 使用例程 说明书

ADS使用例程前言:ADS是一个开发ARM很好的环境,同样周立功单片机()推出的EasyARM2104实验套件也是学习ARM相当超值的入门工具。
由于配套实验书上对于如何做第一个实验方面给出的指导具体步骤不够清晰,新手一般都要摸索一阵子,所以本人写了如下一个ADS的使用例程,演示一个最简单的程序的运行范例。
另外,ADS是一个功能很强大的ARM开发软件,本人的水平也依然停留在初学的层次上,很多深层次的使用问题,设置参数问题需要大家一起仔细阅读英文的pdf使用说明,这里只是希望这篇文档能起到抛砖引玉的作用,把大家领进门。
花了3天时间写出的本文,肯定存在不少错误,加上本人也是新手,所以如果发现文中有错误希望大家指出。
我的e-mail:masashinakayama@注意:本例程要用程序控制周立功EasyARM2104上的LED1,完成该LED1亮暗闪烁。
首先我们假设ADS已经安装完毕(因为涉及版权问题,周公的配套光盘不含ADS软件。
请初学者各显神通,获得该软件)。
本例程使用的是ADS1.2 。
EesyJTAG驱动已经安装。
没安装的请仔细阅读周公配套光盘easyarm_drive\readme.txt安装过程。
EasyARM实验板上JP8 LED1跳线已经短接。
其余跳线设置正确。
(1)建立一个新的项目运行ADS的CodeWarrior IDE,点击File->New,弹出New对话框(如图1)图1 ADS新建工程对话框选择要建立的项目模板,初学者建议选择ARM Executable Image,建立一个ARM指令的项目。
ARM Executable Image 由ARM指令代码生成ELF格式的映像文件Thumb ARM Interworking Image 由ARM指令和Thumb指令混合代码生成ELF格式的映像文件Thumb Execuable Image 由Thumb指令代码生成的ELF格式的映像文件其余选项请参考ADS使用手册在Location项中设置项目的存放目录,并在Project name 项中输入新建项目的名称(本例取名ex_led),然后确定。
ADS-B紧急告警信号在空管自动化系统中的处理研究
ADS-B紧急告警信号在空管自动化系统中的处理研究摘要:紧急告警作为空中交通管制员判别空中紧急情况的重要依据,在日常管制过程中具有非常重要且核心的作用。
错误的告警和不及时的告警对空中交通带来严重威胁。
ADS-B信号的加入,使得紧急告警的种类更加丰富,告警数据来源更加广泛。
但是,ADS-B信号存在的不可靠性和各家空管自动化系统厂家对ADS-B信号的不同处理方式,可能会出现错误告警的情况,带来了比较严重的安全后果;本文提出一种基于双验证的自动化紧急告警处理机制:当ADS-B与雷达信号中均出现告警字符时,系统才给出告警提示。
提高告警准确性,提升管制应急处置效率,保障空管运行安全。
关键词:ADS-B信号;自动化系统;双验证;紧急告警1引言1.1紧急告警应答机代号是一组4位8进制数字,通过分配应答机代号,航空管制员可以对飞行器进行区分。
应答机代号取值从0000到7777,共4096个,其中一些组合带有特定的意思,比如:7500:非法行为(比如劫机)、7600:通讯故障、7700:紧急状况。
空中紧急情况是威胁民航安全的主要因素,对于紧急情况的处置在民航安全中占有很重要的位置。
在紧急情况下,管制员是否能够实施正确、合理的处置手段,以给予飞行员最大的协助,是处置紧急情况的关键。
紧急告警信息的准确及时发现,对正常应急处置具有非常重要的意义。
1.2告警案例2023年1月7日,民航湖南空管分局管制部门报二所空管自动化系统(主用)航迹目标频繁出现HIJ、RCF、EMG等紧急告警,两三秒后告警自动消失,莱斯空管自动化系统(备用)未告警。
经过管制员与飞行员的反复确认飞机处于正常情况后,初步判断为二所空管自动化系统处理问题导致的虚警。
2案例分析值班人员到现场检查二所自动化系统信号处理正常,其SDD为ADS-B融合信号。
继续检查莱斯自动化系统SMP监控显示正常,但其SDD界面并无ADS-B信号。
此现象表明莱斯自动化系统ADS-B信号接收正常,值班人员初步判断莱斯自动化系统对ADS-B信号的处理异常,后续经过查询莱斯自动化系统信号处理日志证实了此判断。
航班受GPS干扰导致ADS-B地面站输出位置异常现象研究

航班受GPS干扰导致ADS-B地面站输出位置异常现象研究作者:***来源:《现代信息科技》2021年第13期摘要:ADS-B系統因其具有建设和维护成本低,定位精度高,数据更新率高等优点而在民航监视领域中大放异彩,其安全运行已经成为影响中国民航活动正常开展的重要因素。
但ADS-B地面站设备和机载设备易受电磁干扰,且自从ADS-B信号正式接入自动化系统提供监视服务后,ADS-B设备受到干扰事件屡见不鲜。
文章通过研究航班受GPS干扰导致ADS-B地面站输出位置异常现象,总结了相应类似异常事件的处理经验。
关键词:ADS-B;GPS干扰;自动化系统;偏航中图分类号:TN929.5;V355.1 文献标识码:A文章编号:2096-4706(2021)13-0045-06Study on the Phenomenon of Abnormal Output Position of ADS-B Ground Station Because of the Flight is Being Disturbed by GPSYI Zhenning(Guilin Air Traffic Management Station of Civil Aviation of China, Guilin 541106,China)Abstract: ADS-B system shines brightly in the field of civil aviation monitoring because of its advantages of low construction and maintenance cost, high positioning accuracy and high data update rate. Its safety operation has become an important factor affecting the normal development of civil aviation activities in China. However, ADS-B ground station equipments and airborne equipments are vulnerable to electromagnetic interference. Since ADS-B signal is officially connected to automation system to provide monitoring service, ADS-B equipment is frequently disturbed. Bystudying the phenomenon of abnormal output position of ADS-B ground station because of the flight is being disturbed by GPS, this paper summarizes the handling experience of corresponding similar abnormal events.Keywords: ADS-B; GPS interference; automation system; yawing0 引言广播式自动相关监视(Automatic Dependent Surveillance Broadcast, ADS-B)系统由于其建设成本低(地面站成本约为传统二次雷达的九分之一),维护成本低,使用寿命长,定位精度高(可达10 m量级),数据更新周期快(1秒1次)等优点,已经逐渐在民航监视领域中占据重要地位。
ADS-A 系列变频器 说明书

第一章概述1.1前言感谢您选用ADS-A系列变频器,本手册包括有变频器使用时的操作说明和注意事项,不正确的使用可能会发生意想不到的事故,故使用变频器前,请仔细阅读本手册,正确地使用变频器并将此手册交给最终用户。
在仔细阅读本使用手册及附属数据并能正确使用前,请不要安装,操作,维护或检查变频器。
在熟悉机器的知识,安全信息以及全部有关注意事项以后使用。
在本手册中,将安全等级分为“危险”和“注意”。
不正确的操作造成的危险情况将导致死亡或重伤的发生。
不正确的操作造成的危险情况将导致一般或轻微的伤害或造成物体的硬件损坏注意:根据情况的不同,“注意”等级的事项也可能造成严重后果。
请遵循两个等级的注事项,因为它们对于个人安全都是重要的。
1.2相关说明1.2.1铭牌说明1.2.2型号说明1.3开箱检本变频器在出厂前经过了严格的质量检验和各项功能测试,并做防振动和防撞击等包装处理,但在运输途中有可能发生意外,致使产品受损。
因此,在您收到产品后,请立即开箱检查。
若以下所列出的任何一项有误,请及时与经销商或本公司联系。
1.3.1检查变频器在运输途中是否造成损坏或螺丝松动;1.3.2箱内变频器一台附使用说明书一本(内附保修单一份)、合格证一张;1.3.3检查变频器的铭牌是否与您所订购产品一致;1.3.4检查有无异物在变频器内。
第二章注意事项2.1安全注意事项2.1.2防止火灾2.1.1防止触电1)当通电或正在运行时,请不要打开盖板,否则会发生触电。
2)在盖板拆下时请不要运行变频器,否则可能会接触到高电压端子和充电部分而造成触电事故。
3)即使电源处于断开时,除布线,定期检查外,请不要拆下盖板。
否则,由于接触变频器充电回路可能造成触电事故。
4)布线或检查,请在断开电源10分钟以后,用万用表等检查剩余电压消失以后进行。
5)变频器请进行接地处理。
(如不接地可能有30-150V 感应电)6)包括操作或检查在内的工作都应由专业技术人员进行。
基于SVDD的ADS-B异常数据检测

基于SVDD的ADS-B异常数据检测王振昊;王布宏【摘要】自动相关监视广播(ADS-B)与空管二次监视雷达(SSR)是空中交通管制的2种重要监视手段,其中ADS-B是目前正在推出的通信协议,在下一代空管监视系统中将会发挥重要作用.然而,ADS-B协议中安全措施缺乏,容易遭受虚假数据注入的攻击.为了识别ADS-B中的异常数据,利用与其同步的SSR数据及通过Kalman滤波得出的的协方差矩阵,得到一组具有多维属性特征的样本数据,使用支持向量数据域描述的方法(SVDD)训练样本数据,可以得到用于检测异常的分类器.利用此分类器检测之后收到的ADS-B数据,从而识别出异常数据.通过仿真实验表明,该方法对于ADS-B异常数据具有80%以上的正确识别率,其中对于固定偏差注入的检测虚警率为5%,漏警率为0,对于随机偏差注入的检测虚警率为5%,漏警率为12.5%,验证了该方法的可行性.【期刊名称】《河北大学学报(自然科学版)》【年(卷),期】2019(039)003【总页数】7页(P323-329)【关键词】自动相关监视广播;空管二次监视雷达;支持向量数据域描述;虚假数据注入;异常检测【作者】王振昊;王布宏【作者单位】空军工程大学信息与导航学院,陕西西安 710077;空军工程大学信息与导航学院,陕西西安 710077【正文语种】中文【中图分类】TP391.9为了保证飞行安全有序,一般利用通信、导航、监视等手段,管理和控制飞机飞行活动,这称为空中交通管制(ATC,air traffic control).传统上的空管监视系统中的一个重要组成部分就是雷达监视系统,包括2个独立的子系统:一次监视雷达(PSR,primary surveillance radar)和二次监视雷达(SSR,secondary surveillance radar),这2个系统能够测量飞机与雷达站的距离和其相对于雷达站的方位角,从而确定飞机位置.然而,雷达监视系统的定位精度不高,并且测量误差会随着飞机与雷达站的距离增加而增加,随着空域飞行流量增长,未来的空中交通密度将会大幅增加[1],ATC对监视技术的精度要求也越来越高,仅用二次雷达将无法满足监视需求.正在被大范围推广的ADS-B是许多国家下一代航空运输系统的一部分,将会成为现代空中交通管制的核心.然而,由于ADS-B的广播特性和协议的开放性,ADS-B容易受到不同的欺骗攻击.而一旦ADS-B遭受攻击,监视数据不再准确,被监视的空中飞行器的安全也将受到极大的威胁.2013年,Campbell等[2]在中研究了基于自动相关监视(ADS-B)的下一代空中交通监控技术的安全性,系统评估了现实的ADS-B攻击,并得出结论:没有适当的对策,关键空中交通管理决策过程不应该仅依赖于ADS-B数据.同时,ADS-B的位置信息来源于GPS,其中也有一些技术上的安全漏洞待评估和解决[3-4].在文献[5]中,Kacem等枚举了各种ADS-B可能受到的攻击并将其分类,这些情况都阻碍了ADS-B的快速设计,部署和使用.为了减少这些攻击造成的影响,过去十几年来,许多学者针对ADS-B的安全性已经做了大量工作.然而,这些解决方案通常需要修改当前协议架构(例如添加加密或认证机制).采用异常数据检测的方式筛选出可能受到攻击的数据并将其剔除是一种有效的防护手段.Kacem等[5]在加密的基础上通过确认收发端消息的完整性以及位置校对进行入侵检测,具有较好的性能指标和开销,但是其依赖于自身建立的ADS-B系统,不易大范围应用.Habler利用LSTM编解码算法通过分析正常ADS-B消息的序列来构建神经网络[6],以此评估所接收的新的ADS-B消息并识别其是否异常。
ADS环境程序启动分析
EQU EQU EQU EQU EQU EQU EQU EQU
(_ISR_STARTADDRESS+0x0) (_ISR_STARTADDRESS+0x4) (_ISR_STARTADDRESS+0x8) (_ISR_STARTADDRESS+0xc) (_ISR_STARTADDRESS+0x10) (_ISR_STARTADDRESS+0x14) (_ISR_STARTADDRESS+0x18) (_ISR_STARTADDRESS+0x1c)
2009-4-9
8
2410启动代码分析
DW8 EQU (0x0) DW16 EQU (0x1) DW32 EQU (0x2) WAIT EQU (0x1<<2) UBLB EQU (0x1<<3) 这几句代码主要用来设置2410内的存储控制积存器BWSCON 大家应该知道2410的存储控制积存器有以下特性: 1 支持大端、小端模式。 2 每个BANK地址空间128M 3 可编程的总线位宽。 4 总共有8个BANK 5 BANK0-BANK6的起始地址是固定的。 6 BANK7的起始地址是可以编程控制的。 7 每个BANK的访问周期可以编程控制的。 下面回顾一下2410的地址映射图:
2009-4-9
11
2410启动代码分析
ASSERT :DEF:BUSWIDTH [ BUSWIDTH=16 B1_BWSCON EQU (DW16) B2_BWSCON EQU (DW16) B3_BWSCON EQU (DW16) B4_BWSCON EQU (DW16) B5_BWSCON EQU (DW16) B6_BWSCON EQU (DW16) B7_BWSCON EQU (DW16) | ;BUSWIDTH=32 B1_BWSCON EQU (DW32) B2_BWSCON EQU (DW16) B3_BWSCON EQU (DW16) B4_BWSCON EQU (DW16) B5_BWSCON EQU (DW16) B6_BWSCON EQU (DW32) B7_BWSCON EQU (DW32) ]
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
T
H
E
A
R
C
H
I
T
E
C
T
U
R
E
F
O
R
T TM
H
E
D
I
G
I
T
A
L
W
O
R1 L
D
Agenda
序言 中断处理 软中断(SWI)处理 其它异常处理
test
63v07 Exception Handling
TM
2
2
异常
Privileged modes OS
软件中断 (SWI) 未定义指令 SMI (TrustZone 仅有)
TM
14
14
Agenda
序言
中断处理 软中断(SWI)处理 其它异常处理
test
63v07 Exception Handling
TM
15
15
中断处理
ARM 有两级外部中断 FIQ,IRQ. 可是大多数的基于ARM 的系统有 >2个的中断源!
因此需要一个中断控制器(通常是地址映射的)来控制中断是怎样传递给ARM的。 在许多系统中,一些中断的优先级比其它中断的优先级高,他们要抢先任何正在处 理的低优先级中断。
复位 中断: FIQ, IRQ 异常中止: Prefetch, Data
test
User mode
应用程序
ARMxyz
63v07 Exception Handling
TM
3
3
ARM 寄存器
Visible Registers Current 当前可见寄存器
Abort Mode Undef SVC Mode IRQ FIQ User Mode Mode
63v07 Exception Handling
TM
7
7
异常返回指令
异常返回:
从SWI 和 Undef异常返回 MOVS pc,lr
使用一数据处理指令:
相应的指令取决于什么样的异常
设置CPSR, “ S”bit PC做为目的寄存器
从FIQ, IRQ 和 预取异常(Prefect Abort)返回 SUBS pc,lr,#4
r0 r1 r2 r3 r4 r5 r6 r7 r8 r9 r10 r11 r12 r13 (sp) r14 (lr) r15 (pc) cpsr spsr
Banked out Registers 备用寄存器
User
r8 r9 r10 r11 r12 r13 (sp) r14 (lr)
FIQ
r8 r9 r10 r11 r12 r13 (sp) r14 (lr)
test
返回时, 异常处理需要:
Reset
Vector Table
Vector table can be at 0xFFFF0000 on ARM720T and on ARM9/10 family devices
63v07 Exception Handling
TM
6
6
异常, 模式 & 地址
Note: 通常中断处理程序总是应该包含清除中断源的代码。
test
Multiple Peripheral interrupt sources nIRQ 地址映射 中断控制器 nFIQ ARM
ARM读控制器寄存器并找 到IRQ/FIQ中断源
ARM写外设寄存器清相 应中断源
63v07 Exception Handling
63v07 Exception Handling
TM
8
8
异常返回地址
ARM 状态:
在异常产生的时候内核设置 LR_mode = PC - 4. 处理程序需要调整 LR_mode (取决于是哪一个异常发生了),以便返回到正确的 地址
Thumb 状态:
处理器根据发生的异常自动修改存在 LR_mode 中的地址 test 不论异常产生时的状态如何,处理器确保处理程序的ARM 返回指令能返回到正 确的地址(和正确的状态)
0x1C 0x18 0x14 0x10 0x0C 0x08 0x04 0x00
FIQ IRQ (Reserved) Data Abort Prefetch Abort
Software Interrupt Undefined Instruction
保存返回地址(PC-4)到 LR_<mode> 设置 PC 位相应的异常向量 从 SPSR_<mode>恢复CPSR 从LR_<mode>恢复PC Note:这些操作只能在 ARM 态执行.
0x30000000 > 32
SWI Handler
Mbytes
0x2000000
IRQ Handler
0x1000
< 4 Kbytes
0xFFC
0x30008000
0x1C 0x18
FIQ Handler B IRQ_handler
0x8 0x4 0x0
MOV PC, #0x30000000 LDR PC, [PC, #+0xFF0]
Exception Type Reset Undefined Instruction Software Interrupt (SWI) Prefetch Abort (Instructions) Data Abort IRQ (Interrupt) FIQ (Fast Interrupt) Mode Supervisor Undefined Supervisor Abort Abort IRQ FIQ Vector Address 0x00000000 0x00000004 0x00000008 0x0000000C 0x00000010 0x00000018 0x0000001C High Vector Address 0xFFFF0000 0xFFFF0004 0xFFFF0008 0xFFFF000C test 0xFFFF0010 0xFFFF0018 0xFFFF001C
因此返回指令为: SUBS pc,lr,#4
test
Note : 表示异常返回后将执行的那条指令
63v07 Exception Handling
TM
18
18
IRQ一览
进入模式 LR(R14) SPSR 禁止 向量地址 返回指令 IRQ PC - 4 CPSR IRQ Base + 018
test
IRQ
SVC
Undef
Abort
test
r13 (sp) r14 (lr) r13 (sp) r14 (lr) r13 (sp) r14 (lr) r13 (sp) r14 (lr)
spsr
spsr
spsr
spsr
spsr
63v07 Exception Handling
TM
4
4
异常事件与起因
异常在当前指令执行完成后才被响应.因此内核在计算 LR 时的 PC 值已被更新.
ARM www xxx yyy zzz pc - 12 pc - 8 pc - 4 pc Thumb pc - 6 pc - 4 pc - 2 pc ARM lr = next instruction Thumb lr = two instructions ahead Interrupt occurred during execution
TM
test
最高
最低
10
10
63v07 Exception Handling
Vector Table & Exception Handlers
reset_handler
FIQ 0x1C IRQ 0x18 0x14
fiq_handler
B irq_handler (Reserved)
test
Data Abort 0x10 B data_abort_handler Prefetch Abort 0x0C B prefetch_abort_handler SWI 0x08 Undef 0x04 Reset 0x00 B SWI_handler
异常可以由内部或外部事件引起 外部异常源
Reset FIQ IRQ Abort
复位输入 –nRESET, HRESETn nFIQ 输入 nIRQ 输入 Abort 输入, AHB 错误响应, MMU/MPU 保护故障
内部异常源
执行未定义指令 执行协处理器指令,但
test
TM
16
16
FIQ vs IRQ
FIQ 和 IRQ 提供了非常基本的优先级级别。
在下边两种情况下,FIQs有高于IRQs的优先级:
当多个中断产生时,FIQ高于IRQ. 处理 FIQ时禁止 IRQs.
IRQs 将不会被响应直到 FIQ处理完成.
FIQs 的设计使中断处理尽可能的快.
test
FIQ 向量位于中断向量表的最末.
为了使中断处理程序可从中断向量处连续执行 中断处理必须保护其使用的非私有寄存器
FIQ 模式有5个额外的私有寄存器 (r8-r12)
可以有多个FIQ中断源,但是考虑到系统性能应避免嵌套。
63v07 Exception Handling
TM
17
17
从FIQs和IRQs返回
63v07 Exception Handling