家用智能吸尘器的设计
全自动吸尘器部分结构的设计

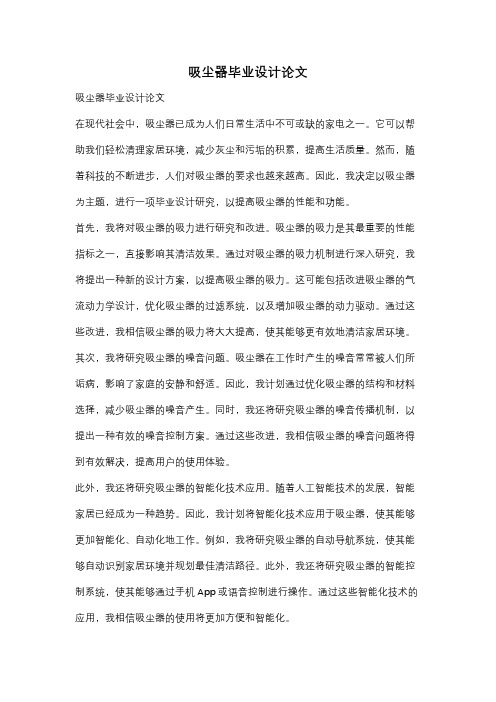
图3 转 向结 构 图 1 功 能 吸 尘 器 的 阻力 计 算 . 多 设 计 多功 能吸 尘器 的质量 在3 gU 车轮 的 阻力 矩 由 K¥后 公 式
T=mg  ̄r xf
圈4 轴 的 装 配 简 图 通 过 中间 的 轴 进 行 定 位 , 择 轴 承 盖 将 轴 承 固 定 , 且 密 选 并 封 。 键 的 选 取 ( 据 《 械 设 计 课 程 设 计 指 导 》 选 定 。 选 取 根 机 ) G 19 — 9 4 6 B 067键 x 。
取标 准 值d lmm, 为 轴 直径 最 小 直 径 。 =O 即 2拟 定 轴 上 零 件 的 装 配方 案 .
N= / U C≈ 1 r n 2/ mi
为 了便 于 联 轴 器 的连 接 ,以及 车 轮 的 安装 。可用 下 述 方 案 , 轴的左侧需要连接联轴器 , 在 以便 于 和 步进 电机 的轴 相 互 连接 , 轴 的 右侧 有 键 主 要 用 来 和 车 轮 连 接 , 右 侧 同时 加 工 在 在 螺纹 , 车 轮 能 够 沿 轴 向 固 定 , 轴 的 中 间 留有 轴 间用 来 固定 使 在 轴 承 , 步 选 定 轴 的 直 径 为 D 1 m 轴 间 D 1rm, 根 据 轴 逐 = 0 m, =2 a 则 的直 径 来 选 择 轴 承 和 联 轴 器 等 , 由于 轴 的直 径 较 小 现 有 的标 准 联 轴 器 很 难 满足 设 计 的要 求 。 因此 需 要 单 独 设 计 联 轴 器 , 选 用 钢 管 加 工满 足要 求 的 孔 而 后 加 工 两 个 径 向螺 纹 孔 。用 螺 钉 将 电 机 轴 与转 轴相 连 接 ,轴 上 面 的 平 台可 以通 过 磨 削 的 方 式 实 现 , 动 轴 承 的 选 取 根 据 《 承 手册 》 用 深 沟 球 轴 承 , 承 滚 轴 选 轴 的 型 号6 8 0 其 基 本 尺 寸 B D d 5 1 × 0 10 , × × = × 9 l.
吸尘器毕业设计论文
吸尘器毕业设计论文吸尘器毕业设计论文在现代社会中,吸尘器已成为人们日常生活中不可或缺的家电之一。
它可以帮助我们轻松清理家居环境,减少灰尘和污垢的积累,提高生活质量。
然而,随着科技的不断进步,人们对吸尘器的要求也越来越高。
因此,我决定以吸尘器为主题,进行一项毕业设计研究,以提高吸尘器的性能和功能。
首先,我将对吸尘器的吸力进行研究和改进。
吸尘器的吸力是其最重要的性能指标之一,直接影响其清洁效果。
通过对吸尘器的吸力机制进行深入研究,我将提出一种新的设计方案,以提高吸尘器的吸力。
这可能包括改进吸尘器的气流动力学设计,优化吸尘器的过滤系统,以及增加吸尘器的动力驱动。
通过这些改进,我相信吸尘器的吸力将大大提高,使其能够更有效地清洁家居环境。
其次,我将研究吸尘器的噪音问题。
吸尘器在工作时产生的噪音常常被人们所诟病,影响了家庭的安静和舒适。
因此,我计划通过优化吸尘器的结构和材料选择,减少吸尘器的噪音产生。
同时,我还将研究吸尘器的噪音传播机制,以提出一种有效的噪音控制方案。
通过这些改进,我相信吸尘器的噪音问题将得到有效解决,提高用户的使用体验。
此外,我还将研究吸尘器的智能化技术应用。
随着人工智能技术的发展,智能家居已经成为一种趋势。
因此,我计划将智能化技术应用于吸尘器,使其能够更加智能化、自动化地工作。
例如,我将研究吸尘器的自动导航系统,使其能够自动识别家居环境并规划最佳清洁路径。
此外,我还将研究吸尘器的智能控制系统,使其能够通过手机App或语音控制进行操作。
通过这些智能化技术的应用,我相信吸尘器的使用将更加方便和智能化。
最后,我还将研究吸尘器的可持续性和环保性。
随着人们对环境保护意识的提高,绿色环保已成为各行各业的重要发展方向。
因此,我计划通过优化吸尘器的能源利用效率,减少其对环境的影响。
同时,我还将研究吸尘器的可回收材料应用,以提高吸尘器的可持续性。
通过这些改进,我相信吸尘器将更加环保,符合人们对绿色生活的追求。
基于全自动吸尘器的设计

基于全自动吸尘器的设计引言全自动吸尘器是一种智能家居设备,能够自动清扫地面上的污垢和灰尘,为用户提供更加便捷的家居清洁解决方案。
本文将详细介绍基于全自动吸尘器的设计,包括其工作原理、功能特点以及相关技术。
工作原理基于全自动吸尘器的设计主要基于以下工作原理:1.避障与导航:全自动吸尘器采用激光、红外线和超声波等传感器来感知周围环境,并根据地图算法进行导航,避免碰撞和坠落。
2.吸尘与清洁:吸尘器设备搭载高效的电机和吸尘装置,能够吸入地面上的灰尘和污垢,并收集到储存盒中。
3.充电与续航:当电池电量低时,全自动吸尘器能够自动返回充电座进行充电,并在充满电后继续工作。
功能特点基于全自动吸尘器的设计具有以下功能特点:1.智能调度:全自动吸尘器能够根据用户设定的时间表进行自动清扫,无需人工干预。
2.远程操控:用户可以通过手机APP或远程控制器对全自动吸尘器进行远程操控,如启动、暂停和设置清洁计划等。
3.高效清洁:全自动吸尘器配备高效的吸尘系统和多种清洁模式,能够全面清洁地面上的灰尘和污垢。
4.自动充电:当电池电量低时,全自动吸尘器能够自动返回充电座进行充电,充满电后继续工作,无需人工干预。
5.智能避障:全自动吸尘器搭载多种传感器,能够感知周围环境,并根据地图算法进行导航,避免碰撞和坠落。
技术实现基于全自动吸尘器的设计主要依赖以下技术实现:1.传感技术:全自动吸尘器采用激光、红外线、超声波等传感器来感知周围环境,以实现避障和导航功能。
2.电池与充电技术:全自动吸尘器搭载高容量锂电池,并具备智能充电功能,能够实现自动充电和续航工作。
3.吸尘技术:全自动吸尘器配备高效的电机和吸尘装置,能够高效吸入地面上的灰尘和污垢,并存放到储存盒中。
4.算法与导航技术:全自动吸尘器采用先进的地图算法和导航技术,能够根据传感器感知到的环境信息进行智能导航和避障。
5.远程控制技术:用户可以通过手机APP或远程控制器对全自动吸尘器进行远程操控和设置清洁计划等功能。
智能吸尘器:家庭清洁的自动化

智能吸尘器:家庭清洁的自动化
在现代家庭生活中,清洁工作往往是一项耗时且重复的任务,但随着科技的进步,智能吸尘器的出现正在改变这一现状。
这些小巧的机器人不仅能够自主完成清洁任务,还能通过智能算法优化其工作路径,确保家庭环境的整洁与卫生。
智能吸尘器的核心优势在于其自动化能力。
它们通常配备有传感器和摄像头,能够识别和避开障碍物,如家具、电线和楼梯。
这些设备能够根据房间的大小和布局自动规划清洁路线,确保覆盖到每一个角落。
一些高级型号甚至能够通过与智能手机应用的连接,让用户远程控制清洁过程,或者设置特定的清洁计划。
除了自动化清洁,智能吸尘器还具备自我维护的能力。
许多型号都配备了自动回充功能,当电量低时,它们会自动返回充电座充电,待电量充足后继续未完成的清洁任务。
这种自我管理的能力大大减少了用户的干预,使得家庭清洁变得更加轻松。
智能吸尘器的另一个吸引人的特点是它们的高效性。
与传统的吸尘器相比,智能吸尘器通常设计得更加紧凑,能够在家具下方和其他难以触及的地方进行清洁。
它们还配备了高效的过滤系统,能够捕捉微小的灰尘和过敏原,改善室内空气质量。
然而,智能吸尘器并非没有缺点。
一些用户可能会对它们的高昂价格感到犹豫,尤其是对于那些预算有限的家庭来说。
此外,虽然智能吸尘器在大多数情况下都能很好地工作,但它们仍然需要定期的维护和清洁,以保持最佳性能。
总的来说,智能吸尘器代表了家庭清洁自动化的未来。
随着技术的不断进步和成本的逐渐降低,我们可以预见,这些智能设备将成为越来越多家庭的清洁帮手,让清洁工作变得更加高效、便捷和愉快。
产品设计设计 毕业论文 吸尘器

本科生毕业设计创作报告题目:手持式无绳吸尘器设计姓名:系别:专业:年级:学号:指导教师:职称:年月日原创性声明兹呈交的学位论文(设计),是本人在导师指导下独立完成的研究成果。
除文中已经明确标明引用或参考的内容外,本论文(设计)不包含任何其他个人或集体已经发表或撰写过的研究成果。
本人依法享有和承担由此论文而产生的权利和责任。
声明人(签名):日期:年月日Scavenger——手持式无绳吸尘器设计【摘要】本文基于对吸尘器的概念、工作原理、功能特性等方面的调研,介绍了研究手持式无绳吸尘器的目的与意义。
根据特定的使用人群和使用场景,建立相应的用户模型,研究女性用户的心理、生理特点及不同的使用场景对吸尘器设计的影响。
通过对国内外吸尘器市场现状的深入研究,了解用户对吸尘器的需求,并考虑未来吸尘器外观、功能、技术等方面的发展趋势。
从适用性出发,以提高人们生活水平、工作质量为目的,设计这一款多功能手持式无绳吸尘器。
【关键词】吸尘器多功能手持式电池更换Scavenger——Design of Handheld Cordless Vacuum Cleaner [Abstrac]Based on the research on the concept, working principle and function of vacuum cleaner, this paper introduces the purpose and significance of studying hand-held cordless vacuum cleaner. According to the specific use of the crowd and the use of the scene, the establishment of the corresponding user model to study the psychological and physiological characteristics of female users and the use of different scenes on the impact of vacuum cleaner design. Through the in-depth study of the status quo of vacuum cleaner market at home and abroad, to understand the needs of users of vacuum cleaners, and consider the future vacuum cleaner appearance, function, technology and other aspects of the development trend. From the applicability, to improve people's living standards, the quality of work for the purpose of the design of a multi-purpose handheld cordless vacuum cleaner.[Keyword]Vacuum cleaner, Multifunction, Handheld, Battery replacement目录第一章课题来源 (1)研究背景 (1)吸尘器的概念及工作原理 (1)吸尘器的发展历史 (1)研究现状 (1)错误!未定义书签。
扫地机器人产品改良设计报告书

• 吸力: 2700pa • 充电时间: 约6H • 充电类型: 自动回充 • 清扫路线: 规划式 • 续航时间: 180分钟 • 机身高度: 9.8CM • 电池节数: 8节
最有设计感——LDS D500
• 适用环境: 瓷砖、地板、 干湿两用
• 充电时间: 约3H • 噪音: 60db • 充电类型: 自动回充 • 清扫路线: 规划式 • 续航时间: 120分钟 • 机身高度: 9.7CM • 电池节数: 2节
环境定位: 使用环境 多是家中,地面材质 多是木地板与瓷砖。
风格定位: 圆形、 明艳活泼、暖色
系。
功能定位 主要功能: 扫地 附加功能: 自动充电、拖地功 能、惯性定位、碰撞保护、手 机APP远程遥控、报警装置。
解决问题: 价格降低、噪音减 小。
方案二
设计目标: 满足中年人群对于节 省时间打扫的需要,造型与颜 色上选择D字形和较稳重的冷色 系,完善主要功能,优化附加 功能。
形态
1、圆形:有效避免机器本身和家具受到损 坏。
2、方形:更好切入墙角位置,但是转向相 对不灵活。
3.三角形:转向灵活,可以更好切入墙角, 但覆盖率低。
圆形: 市面上主流形状
方形
三角形
色彩 由起初的黑白灰到现在多种丰富的颜色
暗淡
•市 面 上 大 多 以 黑 白 为 主
功能分类
• 1、清洁能力:吸力、主刷类型、 是否有拖地功能。
最新款——N8
最贵款/最有设计感——T8AIVI
• 适用环境: 地板、地毯 • 吸力: 1500pa • 充电时间: 约6H • 噪音: 67db • 充电类型: 自动回充 • 清扫路线: 规划式 • 续航时间: 180分钟 • 机身高度: 9.4CM • 电池节数: 4节
智能吸尘器结构分析改进

智能吸尘器结构分析改进随着科技的不断进步,智能家居已经成为了当今社会的一个热门话题。
其中,智能吸尘器作为现代家庭不可缺少的电器,也在不断改进和升级。
在这篇文章中,我们将介绍智能吸尘器结构分析改进的相关内容。
首先,我们要了解智能吸尘器的原理和结构。
智能吸尘器是一种利用高速旋转的电动机产生负压,从而吸取地面上的垃圾和灰尘的家用电器。
随着科技的不断进步,智能吸尘器的功能也越来越强大,可以实现自动充电、预定清洁时间、遥控操控等功能。
但是在智能吸尘器的使用过程中,我们也会面临一些困难。
例如,传统的吸尘器在吸取垃圾时会较容易堵塞,需要经常清理滤网等部件。
而且,由于吸尘器的结构相对复杂,很难对其进行清洁和维护。
为了解决这些问题,智能吸尘器的结构需要进行改进。
首先,我们可以改进它的吸头结构。
传统的吸头结构只有一个吸口,并且直接面对地面吸尘。
但是这会导致一些大块的垃圾无法被吸到,而是被卡在吸头中间。
因此,我们可以增加吸头的吸风量,使其能够更好地吸取地上的灰尘和垃圾。
同时,还可以增加吸头的宽度和长度,使其更加适合各种不同的清洁场景和环境。
其次,我们还可以改进智能吸尘器的筛网和过滤系统。
当前,很多智能吸尘器的筛网和过滤系统并不够完善,很容易就被堵塞或损坏。
因此,我们可以采用更先进的过滤材料和筛网设计,使其更加耐用、易于清洁和维护。
同时,还可在吸尘器内置一个污物仓或尘袋,用来存储大块的垃圾,以免堵塞整个系统。
最后,我们还可以改进智能吸尘器的电源和充电模块。
在传统的智能吸尘器中,充电模块常常容易失灵或者无法满足长时间使用的需求。
因此,我们可以使用更高品质的电源和更先进的充电技术,以便更好地满足用户的需求。
总之,智能吸尘器结构的分析改进涉及多个方面,包括吸头结构、筛网和过滤系统和充电模块等。
通过我们的努力,我们相信能够打造出更加智能、高效和便捷的智能吸尘器,以满足用户的需求,提升生活品质。
智能全自动吸尘器的功能及工作原理介绍

智能全自动吸尘器的功能及工作原理1.路径规划功能介绍:自动实现科学合理的行走路线,彻底清扫家庭卫生,没有遗漏区域。
功能原理:通过电脑芯片控制机器人的左右轮转速,实现圆弧形清洁路线。
当圆弧的半径拓展到7.5m的时候,芯片程序会控制机器人离开当前路线,在7.5m远处再次执行圆弧清洁路线。
大量的圆弧对地面实行无缝覆盖,从而达到全面清洁地面的目的。
2.自动充电功能介绍:自动打扫完一圈后回到充电座上面自动充电,方便下一次使用功能原理:在机器人电量快要耗完时,机器人顶部的红外线发射头发射出无电信号,当充电基座上的两个红外线接收头接收到此信号时,机器人便与充电基座取得了联系后。
通过两个红外线接收头对机器人的引导,使其慢慢靠拢,最终实现对接。
有些朋友不太清楚应该怎样选购吸尘器,您可以参考《什么样的智能吸尘器好,应该怎样选购?》一文,传送门:/archives/132.html3.防跌落功能介绍:例如在桌面上清扫的时候,走到桌沿后会自动感应到,然后倒退或者转向继续行走。
功能原理:在机器人底部前段,安装了4对红外线感应头,每一对感应头包含一个发射头和一个接收头。
红外线发射头发射的红外经地面发射后,被对应的接收头所接收。
如果机器人底部距离地面的高度超过5mm,电脑芯片便会控制机器人,使其退回或者转向。
4.超薄机身设计超薄的机身一般只有8cm~10cm,可轻松的清扫平时我们难以接触的地方如沙发底部和床底。
并且相对应的是,在床底和沙发底清扫时,使用‘阴暗区清扫’功能,可让机器人彻底清扫完后才出来,更智能更快捷。
5.自动倒垃圾一般的机器人吸尘器灰尘盒容量不够,会造成多次手动倒垃圾的情况。
睿洁机器人拥有0.8 L 灰尘盒,如果家中不是长期没有清洁,一般每次清洁只需更换一次灰尘盒。
0.8 L超大容量灰尘盒, 采用的是磷酸铁锂环保电池电池,每次充电时间只需1小时,并可连续使用1小时。
本文转载自:贺紫菲博客更多家用吸尘器智能吸尘器相关知识您还可以访问。
全自动吸尘器的设计
摘要随着社会的进步和发展,人们的学习、工作越来越繁忙,于是怎样更大程度地将人们从烦琐的日常事物中解脱出来,就成了新一代家电所追求的目标,而自动化正是这一目标的集中体现。
本文介绍的全自动吸尘器初步实现了无人情况下的自主工作方式。
它自带电源,利用了超声波测距的原理,通过向前进方向发射超声波脉冲,并接收相应的返回声波脉冲,对墙壁等进行判断;通过以单片机为核心的控制器实现对超声发射和接收的选通控制,并在处理返回脉冲信号的基础上加以判断,选定相应的控制策略;通过驱动器驱动两步进电机,带动驱动轮,从而实现行走转向等功能;通过红外线热释电传感器对人的活动进行检测,减少人对吸尘器行走的影响。
在吸尘器行走的同时,由其自身携带的小型吸尘部件,对经过的地面进行必要的吸尘清扫。
关键词:步进电机单片机超声波传感器电子罗盘目录摘要 1 Abstract 错误!未定义书签。
第1章绪论 1 1.1 家用吸尘器的原理 11.1.1 家用吸尘器的分类 11.2 全自动吸尘器的研究目的与意义 21.3 全自动吸尘器的发展 3 第2章全自动吸尘器控制部分设计 42.1单片机的结构和性能 42.2电子罗盘的性能 62.3超声波传感器的原理及性能 72.4红外线热释电传感器的原理及性能 82.5整个控制系统的组成及工作原理 9 第3章全自动吸尘器结构的设计 113.1全自动吸尘器外壳结构设计错误!未定义书签。
3.2全自动吸尘器吸尘部位结构设计错误!未定义书签。
3.3 全自动吸尘器行走部位结构设计错误!未定义书签。
3.3.1 全自动吸尘器主要参数计算 11第4章电源及驱动电路的设计 134.1供电电源的设计 134.2步进电机的原理及驱动电路 144.2.1 步进电机的原理 144.2.2 步进电机的特性 164.2.3 步进电机的驱动 184.3电动风机的工作原理及驱动 194.3.1 电动风机的工作原理 194.3.2 电动风机的特性及驱动电路 20 第5章全自动吸尘器控制系统的软件编制 235.1全自动吸尘器工作过程分析 235.2步进电机的脉冲信号 235.3发生器的脉冲信号 255.4 系统的总体控制流程 26 第6章全自动吸尘器的技术经济分析 27 结论 28 致谢 35 参考文献 29第1章绪论1.1家用吸尘器的原理吸尘器是现代家庭中受到人们广泛喜爱的清洁用具,传统的用具清扫房间往往不能将家里的微细尘埃清扫干净,尘埃总是从一处转移到另一处,尤其是地毯﹑窗帘等处的灰尘就更难以清除,利用吸尘器来做清洁工作就无此弊。
吸尘器设计方案
吸尘器设计方案吸尘器设计方案一、设计背景吸尘器是现代家庭中常用的清洁工具之一,它可以快速高效地清扫地板、家具、窗帘等各类表面灰尘。
随着科技的不断进步,吸尘器的设计也在不断改进,逐渐向轻巧、便捷和智能化方向发展。
然而,目前市场上的吸尘器产品种类繁多,但存在噪音大、灰尘处理不彻底、使用不方便等问题。
二、设计目标本次设计的吸尘器旨在解决现有产品存在的问题,提供更好的使用体验。
设计目标如下:1. 减少噪音:通过优化吸尘器的结构和材料,降低工作时的噪音,提供更舒适的使用环境。
2. 彻底清洁:采用先进的滤尘技术,确保吸尘器可以高效过滤灰尘,防止二次污染。
3. 方便易用:设计简洁、轻巧,方便携带和存放,操作简单、人性化,减少使用者的劳动强度。
4. 智能化:引入智能控制系统,具备自动充电、预约清洁等功能,提升用户体验。
三、设计方案1. 结构设计:采用分离式设计,将吸尘器主机和储尘装置分离,减少主机的体积和重量,方便用户使用和存放。
2. 噪音控制:在主机和储尘装置之间加入隔音材料,减少运行时的噪音。
同时采用优质的电机和风机,降低振动和摩擦噪音。
3. 过滤系统:采用高效过滤器和HEPA过滤技术,确保吸尘器可以过滤掉99%以上的灰尘和细菌,防止二次污染。
过滤器可拆卸清洗,方便用户维护。
4. 动力系统:采用高性能锂电池,提供稳定的电力供应。
引入智能控制系统,可以根据不同地面的情况自动调整吸力,提高清洁效果。
5. 操作设计:主机设计简洁,按钮和吸头布局合理,用户可以轻松掌握操作方式。
增加LED照明系统,方便用户在暗处清洁。
6. 智能功能:吸尘器配备智能控制系统,可以通过手机APP进行远程控制和调节。
用户可以预约清洁时间,吸尘器会在指定时间自动开启清洁,提升使用便利性。
7. 故障处理:吸尘器内置故障诊断系统,可以自动检测和提醒故障信息。
用户可以通过用户手册或APP获取故障排查方案。
四、总结通过以上设计方案,我们的吸尘器产品将在吸力、噪音、清洁效果、方便使用、智能化等方面有较大的提升,为用户提供更好的使用体验。
科学小实验吸尘器的原理

科学小实验吸尘器的原理科学小实验吸尘器的原理吸尘器是一种常用的家用电器,它能够吸收和过滤空气中的灰尘、污垢和其他微小颗粒物,从而保持我们家居空间干净和卫生。
吸尘器的运行原理是通过利用高速旋转的机械风扇来产生一个强大的气流,将灰尘和杂物吸入吸尘器内部,并通过各种过滤器和收集器进行处理和存储。
在这个科学小实验中,我们将探讨吸尘器的原理,并学习如何使用一个简单的模型实现吸尘器的工作原理。
实验材料:-一个塑料瓶(1升),并在瓶子底部开一个小洞(直径约1厘米)。
-一个塑料袋(透明或不透明都可以)。
-一根吸管(必须长到足够长,能够将瓶子上的吸口与嘴巴连接起来)。
-一些灰尘或碎屑。
实验步骤:1. 将吸管插入刚才开辟的小洞中,并将瓶子倒置。
你可以利用胶带或其他固定物将吸管安装在瓶子底部。
2. 将塑料袋张开,塞入到瓶子里面。
确保袋子封在瓶子口上并没有空气漏出去。
3. 将瓶子放在桌子上,试图用嘴巴将吸管吸起。
注意,吸管必须气密地贴在嘴唇上,以防止空气从侧面泄漏,从而破坏吸尘器的功能。
4. 如果你成功地将吸管吸起,并且能听到吸尘器内部产生的声音,那么恭喜你,你已经完成了这个实验!实验说明:在这个实验中,塑料袋充当“吸尘器袋”,负责过滤和收集灰尘和碎屑。
当你用嘴巴将吸管吸起时,瓶子内部产生了一种低压区域,这种低压区域促使空气流入瓶内,并吸入灰尘和碎屑。
灰尘和碎屑随后被塞在塑料袋里,并且不会再进入瓶内。
这个实验反映了真实吸尘器的工作原理,尽管真实的吸尘器技术更为复杂和先进。
现代吸尘器通常包括一个机械风扇,它旋转产生高速气流;一个电动马达,它为风扇提供动力;一个过滤系统,它拦截和存储灰尘和碎屑;以及一个吸嘴,它聚集和吸入地面上的灰尘和污垢。
总结:本实验简单易行,并且是一种有趣的方式来学习吸尘器的工作原理。
通过使用这个塑料瓶和袋子的模型,我们可以清晰地了解吸尘器是如何工作的,并且也可以更好地理解现代吸尘器技术的复杂性和效率。
智能吸尘器:家庭清洁的自动化

智能吸尘器:家庭清洁自动化哎呀,说起这个智能吸尘器,那简直是家里头的“清洁小能手”,自动化得巴适得很!你晓得不,以前扫地抹地,累得腰酸
背痛,现在好了,一键启动,它自个儿就在屋头转悠,角角落落都不放过,灰尘、头发丝儿,统统一网打尽。
这玩意儿聪明得很,遇到桌腿儿、椅子脚,自动绕道走,不像我们有时候还要搬来搬去,麻烦得很。
而且,它还晓得啥时候该充电,自个儿就摸回“窝”里头去了,不用你操心。
最让我欢喜的是,它工作起来还怪安静的,不像以前那种老式吸尘器,嗡嗡嗡的,吵得人脑壳疼。
这下好了,边看电视边让它干活,两不耽误,安逸!
有时候,娃儿在地上耍玩具,撒了一地,我正愁咋个收拾,结果它一转悠,嘿,玩具都归了位,虽然不完全精准,但也算帮了大忙。
家里人都说,这智能吸尘器买得值,是真正的家庭好帮手。
现在啊,我算是体会到了啥子叫“科技改变生活”。
有了这智能吸尘器,家庭清洁再也不是啥累人活儿了,自动化一搞,家里头天天都干干净净,心情都跟着好起来了。
所以说,时代在进步,咱也得跟上步伐,享受这些高科技带来的便利嘛!。
智能吸尘器的开发及设计

智能吸尘器的开发及设计摘要:介绍一种能在无人情况下自主工作,并具有自动避障等功能的新型智能吸尘器的开发及设计,它自带电源,由单片机控制。
关键词:超声波避障功能MC51单片机步进电机智能吸尘器随着社会的进步和发展,人们的学习、工作越来越繁忙,于是怎样更大程度地将人们从烦琐的日常事物中解脱出来,就成了新一代家电所追求的目标。
而智能化正是这一目标的集中体现。
本文介绍的智能吸尘器初步实现了无人情况下的自主工作方式,很大程度地提高了产品的自动化水平。
1总体原理该智能吸尘器利用了超声波测距的原理,通过向前进方向发射超声波脉冲,并接收相应的返回声波脉冲,对障碍物进行判断;通过以单片机为核心的控制器实现对超声发射和接收的选通控制,并在处理返回脉冲信号的基础上加以判断,选定相应的控制策略;通过驱动器驱动两步进电机,带动驱动轮,从而实现避障功能。
与此同时,由其自身携带的小型吸尘部件,对经过的地面进行必要的吸尘清扫。
2功能实能整个吸尘器原理上可以分为五个主要部分(如图1):传感器部分、控制器部分、驱动部分、吸尘部分和电源部分。
各部分的原理及具体功能实现如下:2.1传感器部分2.1.1超声波测距原理超声波是一种一定频率范围的声波。
它具有在同种媒质中以恒定速率传播的特性,而在不同媒质的界面处,会产生反射现象。
利用这一特性,就可以根据测量发射波与反射波之间的时间间隔,从而达到测量距离的作用。
其具体的计算公式如下:s=v×t/2其中,s为障碍物与吸尘器之间的距离;t为发射到接收经历的时间;v为声波在空气中传播的速度。
由于v的值受温度的影响会波动,因此,在实际的应用中可以用以下公式来加以补偿,其中T表示空气的绝对温度,m/s为速度单位。
在智能吸尘器中,避障功能的实现正是利用了这一超声波测距的原理。
它的传感器部分由三对(每对包括一个发射探头和一个接收探头)共六个超声波传感头组成。
由单独的振荡电路产生频率固定为40kHz,幅值为5V的超声波信号。
吸尘器分析比较 PPT课件

浦桑尼克 JOJO—T1
✓
这款吸尘器属于扫地机器人的
范畴,外观设计以方形为主,黑红色
经典大气,吸尘口加宽设计,提高了
清洁力,也使得接触面积变大了,前
低后高的设计也跟方便沙发底部和座
椅底部运行。方形设计的外观比圆形
✓ 这款吸尘器采用无绳设计,并且取代传统刷条上的刷毛,利用 柔软尼龙丝覆盖整个清洁滚筒,它可以吸附较大残屑,同时防 静电碳纤维毛刷能够吸除微尘。
✓ 无线束缚就靠电池供电,所以在续航上用镍钴锰锂电池技术, 与通常电池有所区别,吸力由始至终保持强劲,超强效模式下 的6分钟清洁,让用户处理难以清除的位置。
✓ 不过这款设计也有不足之处,电池续航时间较短,垃圾舱 存储量较少不便于大面积使用。
飞利浦FC7070/81
✓ 这款吸尘器的外形设计高端酷炫,流线型机身具有科技感, 磨砂金属银色的外壳手感舒适细腻,让人感受到飞利浦的 德国设计感。
✓ 灵活的吸尘口可应对不同角落处打扫,机身重量轻便稳固, 用户一只手就可以轻松操作,遗憾额是这款吸尘机并不是 无绳的,所以并不能肆意推动挪用。
科沃斯CR130
✓ 作为目前最受关注的扫地机器人品牌,科沃斯地宝金刚 CR130智能扫地机器人采用了圆形外观设计,黑色的外观 搭配烤漆设计,整体设计凸显了大气的设计风范。产品采 用IMD膜内贴片工艺,避免了地宝在使用过程中出现的划 伤问题。
✓ 完整的防跌落设计,底部配置了4组下视传感器,可探测 3.5cm高度,遇到台阶时会自动转弯,避免跌落,产品能 够清扫15°斜坡,地毯,地面压条轻松穿越。
莱克VC-B502-3
✓ 这款手持式吸尘器在集合了前两款的功能,他最大的特点 就是超宽吸口,可以处理各种垃圾物体。
全自动吸尘器设计

青岛黄海职业学院毕业设计(论文)设计(论文)题目:全自动吸尘器姓名学号系部专业年级指导教师2013年10月28日摘要全自动吸尘器将移动机器人技术和吸尘器技术有机地融合起来,实现室内环境(地面)的半自动或全自动清洁,替代传统繁重的人工清洁工作,近年来已受到国内外的研究重视。
作为智能移动机器人的一个特殊应用,从技术层面上讲,智能化自主式吸尘器比较具体地体现了移动机器人的多项关键技术,具有较强的代表性。
从市场前景角度讲,自主吸尘器将大大降低劳动强度、提高劳动效率,适用于家庭和公共场馆的室内清洁。
因此开发自主智能吸尘器既具有科研上的挑战性,又具有广阔的市场前景。
利用了超声波测距的原理,通过向前进方向发射超声波脉冲,并接收相应的返回声波脉冲,对墙壁等进行判断;通过以单片机为核心的控制器实现对超声发射和接收的选通控制,并在处理返回脉冲信号的基础上加以判断,选定相应的控制策略;通过驱动器驱动两步进电机,带动驱动轮,从而实现行走转向等功能;通过红外线热释电传感器对人的活动进行检测,减少人对吸尘器行走的影响。
在吸尘器行走的同时,由其自身携带的小型吸尘部件,对经过的地面进行必要的吸尘清扫。
当吸尘器电力不足时,它会自动寻找充电插头上发射的红外线,找到充电后其尾部的松耦合变压器靠近插头实现充电。
当蓄电池的电充满后自动返回未完成的任务。
关键词:单片机超声波传感器电子罗盘红外线热释电传感器松耦合变压器步进电机AbstractAutomatic cleaner mobile robot technology and vacuum technology organically fuses and realize the indoor environment (ground) or automatic, semi-automatic cleaning to replace the traditional manual cleaning work hard at home and abroad in recent years, the research has been seriously. As intelligent mobile robot is a special applications, technically speaking, intelligence autonomous cleaner is concretely embodies the key techniques of the mobile robot, strong representation. From the Angle of market prospect, independent cleaner will greatly reduce the labor intensity, improve work efficiency, suitable for family and public venues indoor cleaning. So the development of independent intelligent cleaner is challenging, and research on the broad market prospect.Using the principle of the ultrasonic ranging, through the forward direction, and receive launch ultrasonic pulse corresponding returns on wall, sonic pulse judgment; etc. Through the controller based on singlechip of ultrasonic transmission and reception for the control and processing in the back pulse signal, selected based on the corresponding control strategy, Through the actuator two stepper motor driving wheel drive, walking, so as to achieve the function such as steering, Pyroelectric infrared sensors through to people's activities, reduce the influence of vacuum cleaner to walk. While walking in the vacuum cleaner, by its own small parts, and carry on the dust of the ground through the necessary dust cleaning. When the vacuum cleaner power shortage, it will be looking for charging plug the ir, find the charging its tail loose coupling transformer near the plug realize charging. When the battery electric full automatic return after the unfinished tasks.Keywords : SCM Ultrasonic sensors Electronic compass Heat-releasing infrared sensors Loose coupling transformer Stepping motor目录第一章绪论 (1)1.1全自动家用吸尘器简介 (1)1.1.1全自动吸尘器的原理 (1)1.1.2 全自动吸尘器的分类 (2)1.1.3全自动吸尘器的发展前景 (2)1.1.4全自动吸尘器的研究目的与意义 (3)第二章全自动吸尘器控制部分设计 (5)2.1单片机的由来 (5)2.2单片机硬件结构和开发过程 (5)2.2.1单片机的引脚功能 (5)2.3超声波传感器的原理及性能 (7)2.4红外线热释电传感器的原理及性能 (9)2.5整个控制系统的组成及工作原理 (10)第三章全自动吸尘器结构的设计 (12)3.1全自动吸尘器外壳结构设计 (12)3.2全自动能吸尘器吸尘部位结构设计 (13)3.3全自动吸尘器行走部位结构设计 (14)3.3.1全自动吸尘器主要参数计算 (14)3.3.2轴的结构设计 (15)3.3.3轴的强度校核 (17)第四章电源及驱动电路的设计 (19)4.1供电电源的设计 (19)4.2移动机器人自动充电技术 (20)4.3非接触感应能量传输系统中松耦合变压器 (26)4.4步进电机的原理及驱动电路 (29)4.4.1步进电机的原理 (29)4.4.2步进电机的特性 (31)4.4.3步进电机的驱动 (32)第五章电动风机的工作原理及驱动 (34)5.1电动风机的工作原理 (34)5.2电动风机的特性及驱动电路 (34)第六章全自动吸尘器控制系统的软件编制 (37)6.1全自动尘器工作过程分析 (37)6.2步进电机的脉冲信号 (37)6.3发声器的脉冲信号 (39)6.4系统的总体控制流程 (40)第七章全自动吸尘器的技术经济分析 (41)结论 (42)致谢 (43)参考文献 (44)第一章绪论1.1 全自动家用吸尘器简介1.1.1全自动吸尘器的原理吸尘器是现代家庭中受到人们广泛喜爱的清洁用具,传统的用具清扫房间往往不能将家里的微细尘埃清扫干净,尘埃总是从一处转移到另一处,尤其是地毯﹑窗帘等处的灰尘就更难以清除,利用吸尘器来做清洁工作就无此弊。
智能吸尘器毕业设计

智能吸尘器毕业设计智能吸尘器毕业设计在现代社会中,科技的快速发展为我们的生活带来了许多便利。
智能家居产品作为其中的一种代表,已经逐渐走进了我们的生活。
而智能吸尘器作为智能家居产品中的一员,正受到越来越多人的关注和青睐。
因此,设计一款智能吸尘器成为了许多学生的毕业设计课题。
智能吸尘器是一种能够自主工作的机器人,可根据用户的需求自动清扫家中的灰尘和杂物。
它具备自主导航、避障、识别和清扫等功能,能够有效地减轻人们的家务负担。
在设计智能吸尘器的过程中,需要考虑到多个方面的因素。
首先,智能吸尘器需要具备良好的导航系统。
通过搭载激光雷达等传感器,智能吸尘器可以实时感知周围环境,并制定清扫路径。
同时,导航系统还需要具备较高的定位精度,以确保智能吸尘器能够准确地清扫每一个角落。
其次,智能吸尘器需要具备强大的避障能力。
在清扫过程中,智能吸尘器可能会遇到各种障碍物,如家具、地毯等。
因此,设计师需要通过算法和传感器的配合,使智能吸尘器能够智能地绕过这些障碍物,避免碰撞和损坏。
另外,智能吸尘器还需要具备识别功能。
通过搭载图像识别技术,智能吸尘器可以识别出家中的不同区域,并根据不同区域的特点进行清扫。
例如,对于厨房和卫生间等易脏区域,智能吸尘器可以加强清扫力度,以确保彻底清洁。
此外,智能吸尘器还可以通过连接互联网,实现远程操控和智能化管理。
用户可以通过手机APP或者智能音箱等设备,随时随地对智能吸尘器进行控制和监控。
这样,即使不在家中,用户也能够随时了解智能吸尘器的工作情况,并进行相应的操作。
在智能吸尘器的毕业设计中,还可以考虑一些创新的功能。
例如,可以添加除菌功能,使智能吸尘器不仅能够清扫灰尘,还能够杀灭细菌,提高家居环境的卫生程度。
另外,可以设计智能吸尘器的外观,使其更加美观大方,融入家居装饰,提升用户的使用体验。
总之,设计一款智能吸尘器是一项有挑战性的毕业设计课题。
在设计过程中,需要考虑到导航系统、避障能力、识别功能、远程操控和创新功能等多个方面。
吸尘器的设计范文
吸尘器的设计范文吸尘器是现代生活中常见的清洁工具,它的设计与功能直接影响着清洁效果和用户体验。
以下是关于吸尘器设计的一些思考,共计1200字以上。
首先,我们需要考虑吸尘器的外观设计。
外观是用户对产品的第一印象,一个吸引人的外观设计可以提高产品的吸引力。
吸尘器外观设计可以从几个方面考虑,包括整体形状、颜色搭配、材料选择等。
整体形状应该符合人体工程学原理,使用户使用起来更加方便舒适。
吸尘器应该有一个舒适的手柄设计,使用户能够轻松地握持和操控。
另外,吸尘器的主体部分应该有一个合适的高度和角度,以便用户在清洁过程中不需要过分弯腰或者伸长手臂。
颜色搭配是另一个需要考虑的方面。
吸尘器通常在居家使用,因此宜选择一些温暖和谐的颜色,如浅灰色、浅蓝色等,以增加用户的舒适感。
此外,颜色应该具有一定的抗污性,以免吸尘器容易脏乱不堪。
材料选择也非常重要。
尤其是需要选择耐用、易清洁的材料,以便吸尘器长期使用不易损坏和生锈。
主要材料可以选择塑料或者金属,其中塑料相对轻便且不易生锈,而金属则更加耐用。
当然,材料的可持续性和环保性也需要考虑,应尽量选择可回收和可循环利用的材料。
其次,吸尘器内部结构的设计也很重要。
吸尘器主要由电机、过滤器、储尘盒等组成,各部件之间的结构设计直接影响吸尘器的性能和清洁效果。
电机是吸尘器的核心部件,它的设计应注重功率与能耗的平衡。
一方面,电机需要具备足够的功率,以保证吸力强劲,能够有效地清理地面灰尘和碎屑。
另一方面,电机的能耗应该尽量降低,以节省能源和减少对环境的影响。
过滤器的设计也很重要。
过滤器的主要作用是将空气中的尘埃和细菌过滤掉,以保持室内空气的清洁。
吸尘器的过滤器可以选择高效的HEPA 过滤器或者其他有效的过滤器。
此外,过滤器的设计还应简便易拆卸和清洗,以方便用户进行维护和清理。
储尘盒是吸尘器中储存灰尘和杂物的地方,因此它的设计也很关键。
首先,储尘盒应该具备足够的容量,以便用户能够连续清理一段时间的灰尘而不需要频繁清理。
全自动吸尘器部分结构的设计

全自动吸尘器部分结构的设计摘要:在不久的将来,吸尘机器会从自主式向人工智能化的方向发展,因此,对于移动机器人的控制技术和运动规划必须要建立在自主的适应控制、控制预测、逻辑模糊、网络神经等的基础之上。
而设计的关键点就是防碰撞功能的控制器和智能运动的规划以及传感器融合的算法。
本文主要对吸尘器部分结构的设计通过三方面来介绍。
关键词:吸尘机器;吸尘器外壳;行走部分;结构设计前言全自动的吸尘器是一种融合了吸尘器的技术和移动机器人的技术来对室内的环境进行的半自动或全自动清洁的吸尘器。
这种设计一旦成功将为人类的生活带来了巨大的便利性。
因此,自主智能吸尘器的开发虽然在科研上具有挑战性,但是具有巨大的市场。
本文主要探究全自动吸尘器的部分结构设计方面的内容。
1.全自动吸尘器外壳结构设计吸尘器的外壳朐起到有效保护内部的结构的作用,同时在安全方面也有着较好的保证效果。
多功能的吸尘器是自动行走于地面上的,所以在结构上必须保证平稳的行走,在机体的设计上必须选择卧式吸尘器的结构。
在材料上壳、后壳、上盖等部分可以采用塑料材料。
前壳的头部是吸入口,在后壳内进行吸尘部件的安装,里面安装的主要是电动机-风机及一些功能性的机构;而车轮要安装在两侧,排风口安装在后壳处主要是便于风机的工作。
家用吸尘器的外壳不但要具备足够的强度,同时还要有美观的造型、重量轻、外表颜色光泽,以及成本低廉等条件,除此以外,造型设计也必须适应内部的结构需要。
一般来说,外壳应用最多的是利用金属材料冲制,或者应用工程塑料,金属材料有较高的强度,由于重量、绝缘材料性能查、制造工艺复杂成本高。
因此,除了老式的吸尘器及工业吸尘器外,现代家用吸尘器很少采用。
由于以上因素的影响,多功能吸尘器的外壳主要应用工程塑料为主,可以利用注塑成型,除了电动风机以外,其他零件一般均可由工程塑料代替金属材料,这不仅适合于大量生产,易于降低成本,而且重量可以减少到金属外壳的1/3—1/4,绝缘性能也大为提高,还可以做成各种款式。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
毕业设计(论文)设计(论文)题目:家用智能吸尘器的设计姓名:李玉红班级:09数控班指导老师:胡蓉完成日期:2012年5月14日摘要随着社会的进步和发展,人们的学习、工作越来越繁忙,于是怎样更大程度地将人们从烦琐的日常事物中解脱出来,就成了新一代家电所追求的目标,而自动化正是这一目标的集中体现。
本文介绍的全自动吸尘器初步实现了无人情况下的自主工作方式。
它自带电源,利用了超声波测距的原理,通过向前进方向发射超声波脉冲,并接收相应的返回声波脉冲,对墙壁等进行判断;通过以单片机为核心的控制器实现对超声发射和接收的选通控制,并在处理返回脉冲信号的基础上加以判断,选定相应的控制策略;通过驱动器驱动两步进电机,带动驱动轮,从而实现行走转向等功能;通过红外线热释电传感器对人的活动进行检测,减少人对吸尘器行走的影响。
在吸尘器行走的同时,由其自身携带的小型吸尘部件,对经过的地面进行必要的吸尘清扫。
关键词:步进电机单片机超声波传感器电子罗盘目录摘要 2 Abstract 错误!未定义书签。
第1章绪论 1 1.1 家用吸尘器的原理 11.1.1 家用吸尘器的分类 11.2 全自动吸尘器的研究目的与意义 21.3 全自动吸尘器的发展 3 第2章全自动吸尘器控制部分设计 42.1单片机的结构和性能 42.2电子罗盘的性能 62. 3灰尘传感器的原理及性能 (7)2. 4电量传感器的原理及性能 (8)2. 5障碍传感器的探测方法 (8)2.6超声波传感器的原理及性能 102.7红外线热释电传感器的原理及性能 112.8整个控制系统的组成及工作原理 12 第3章全自动吸尘器结构的设计 133.1全自动吸尘器外壳结构设计错误!未定义书签。
3.2全自动吸尘器吸尘部位结构设计错误!未定义书签。
3.3 全自动吸尘器行走部位结构设计错误!未定义书签。
3.3.1 全自动吸尘器主要参数计算 13 第4章全自动吸尘器的技术经济分析 15 结论 16 致谢 17 参考文献 18第1章绪论1.1家用吸尘器的原理吸尘器是现代家庭中受到人们广泛喜爱的清洁用具,传统的用具清扫房间往往不能将家里的微细尘埃清扫干净,尘埃总是从一处转移到另一处,尤其是地毯﹑窗帘等处的灰尘就更难以清除,利用吸尘器来做清洁工作就无此弊。
吸尘器不但可以清洁地面,也可以用来清洁一般的器具难以清洁的地方,如沙发,墙壁等。
吸尘器在工作时要经过起尘、吸尘和滤尘三个阶段。
吸尘器一般包括吸尘器电机和风机(电机多为串激整流子电动机、风机是离心式风机)、机身、吸尘管(手持式吸尘器的机身和吸尘管常联为一体)控制电路、滤尘器(袋)和吸尘附件。
一般吸尘器的电机工作功率为400-1000W,体积大一些的吸尘器的功率更高一些,而便携式吸尘器的功率则一般为250W 以下,吸尘器工作时靠电动机高速驱动风机叶轮旋转,使空气高速排出,而风机前端吸尘部分的空气不断地补充风机中的空气,使吸尘器内部产生瞬时真空,和外界大气压形成负压差;在此压差的作用下,吸尘器吸入含灰尘的空气,并经滤尘器过滤,排出清净的空气。
负压差越大风量越大,则吸力也越大,而这时的电机工作功率也就越高。
所以吸尘器也叫真空吸尘器。
真空吸尘器由于应用广泛,特别是为了可以用于不同的场地和场所,需要配置不同规格的吸头,这样可分别用来清除地毯、衣物、沙发、各种物品及电子仪器上的尘屑,使用十分方便。
当然,也有一些是专门设计或专用型吸尘器。
1.1.1家用吸尘器的分类1.按形状大小分类(1)立式:呈圆桶形或方形居多,分上、下两部分,上部装有电机,是动力部分,下部为集尘箱。
(2)卧式:长方形或车型状,有前后两部分,前部为集尘箱,后部为电机部分。
(3)便携式,它一般有五种形式1) 肩式:体积较小,使用时背在肩上,小功率输出。
2) 杆式:形状似杆,上端为把手,下端为吸嘴,小功率输出。
3) 手提式:体积更小,可直接握在手中使用,小功率输出通常用干或蓄电池做电源。
4) 微型式:多用电池供电,体积更小,多用于清洁衣物、仪器等,微功率。
5) 无绳式: 吸尘器拖着长长的电线, 极易纠缠不清。
倘若是无绳式的吸尘器,则可以避免上述情况的发生。
2.按功能分类按功能大致有以下种:干式﹑干湿两用式﹑地毯式及打蜡吸尘式。
干式吸尘器就是上面介绍的几种吸尘器。
干湿两用式吸尘器具有与干式吸尘器相同的性能和用途,此外还能吸取肥皂之类的液体或多水性泡沫污物。
地毯式主要用于地毯的清洁。
打蜡式吸力较差,主要以打蜡为主。
3.按电器安全分类(1)Ⅰ类吸尘器,额定电压超过42伏,只有基本绝缘。
(2)Ⅱ类吸尘器,额定电压超过42伏,全部为双重绝缘,当基本绝缘破坏时,还有一层补充绝缘作用。
(3)Ⅲ类吸尘器,额定电压低于42伏,避免了触电危险。
1.2 全自动吸尘器的研究目的与意义今年来,随着中国工业的快速发展,吸尘器的产销量也大幅增加,在我国市场具有旺盛的生命力。
随着设会的进步和发展,人们的物质和精神生活质量的提高,迫切需要从繁重的清洁工作中解脱出来由此诞生了一种家用服务型吸尘机器人,它将移动机器人技术和吸尘技术有机地融合起来,实现家庭、宾馆、写字楼等室内环境的半自动或全自动清洁,因此具有广阔的市场前景。
目前在欧美日等发达国家,吸尘机器人开发较早,应用范围也较广,近两年来,已经开发出多种面向市场的智能吸尘机器人。
澳大利亚某公司研制出可自动行驶并打扫房间的V4型机器人这种全自动吸尘器表面光滑,体积很小,呈圆形,内置搜索雷达,可以搜索各种房间里的每一处,不会碰撞家具或其它障碍物。
微处理小电脑使它具备在拐至屋角处能探测方向、选择前进路线的能力。
只要将全自动吸尘器放在地面上,它便可自动开始工作。
其搜索雷达会探测出距离最近的墙壁,先顺着墙壁把地板四周的灰尘及异物吸尽;然后再不规则地来回移动于房间的其它位置,并且能在接近障碍物之前迅速转向。
该吸尘机器人由于在主机的周围360°配备了障碍物传感器,因此可以在检测墙壁及障碍物的同时打扫地面;当打扫完可以行驶的场所后,机器人就自动关闭电源。
不管房间的外形及面积的大小、ARNA导航算法引导机器人在任何房间的所有无遮掩区域四处运动来进行清洁工作,因为机器人导航沿房间的周围,所以它要创建自己的空间参考图,机器人不需要任何编程“教它应该去哪里”。
该机器人操作简单,仅有3个按钮:开始、结束以及暂停,人们只要简单地将它放置在需要清扫的区域或房间中,按下开始按钮即可。
国内目前也已开始有关的研究开发工作,特别是在移动机器人的运动规划与控制方面取得了一定的成就,为研究开发吸尘机器人奠定了技术基础。
吸尘机器人作为服务机器人领域中的一个新产品,将使人们能在无人看守情况下轻松地完成室内环境的吸尘等清洁工作。
因此,该吸尘机器人如能大批量生产使成本降低,以低价格进入市场,将会具有巨大的市场前景,有关资料也预测吸尘机器人是未来几年需求量最大的是服务机器人。
1.3 全自动吸尘器的发展前景尽管目前国内外在吸尘机器人研究开发方面已取得一定的成果,但成本过高和许多关键技术问题急待解决。
目前,价格过高是严重影响吸尘机器人打入家电市场的主要因素,为了大幅度降低其成本,必须开发智能传感器、专用运动控制的数字处理芯片;其次,应该看到蓝牙技术在家电行业的应用前景,通过采用蓝牙技术将过高的数字处理成本转移到用户的个人电脑上,则有望在短期内将吸尘机器人的成本降低在千元左右。
未来的吸尘机器人将向自主式和人工智能化发展,因此必须结合现有的基于自适应控制、预测控制、模糊逻辑、神经网络等移动机器人运动规划和控制技术,研究对环境障碍物具有安全可靠的防碰撞功能的智能运动规划与控制器及高效的传感器融合算法,是在现实环境中实现具有良好的自适应性和鲁棒性行为的机器人的关键。
电源技术是吸尘机器人研究工作的核心问题之一,除了为机器人运动、吸尘及控制电路提供能量外,还需优化自动充电方案,保证机器人能及时进行充电,能够自动完成对指定环境的吸尘任务。
在研究提高化学电池使用寿命、缩小体积的同时,一种新兴的质子交换膜燃料电池具有功率大、能量高、寿命长和体积小等优点,为移动电源提供了一种合适的电源,目前,上海某大学燃料电池研究所在这方面进行着有益的尝试。
随着吸尘机器人关键技术和性能价格比的不断提高或改进,相信在现有的软硬件条件的基础上,未来几年内就会推出价格适中的全自动吸尘机器人产品,进而使吸尘机器人能像普通家电产品一样走进千家万户,为这一高新技术产品带来可观的市场和经济效益。
第2章全自动吸尘器控制部分设计2.1单片机的结构和性能全自动吸尘器的控制部分主要由单片机来完成,根据需要选用MC-51系列单片机中的8051作为控制器对整个全自动吸尘器进行控制,8051是ROM型单片机,内含4K字节的ROM。
1.主要特性:8051单片机是由CPU、存储器、I/O接口等组成的微型计算机,它可以寻址64K字节的程序存储器和64K字节的外部数据存储器8051单片机是一种功能很强的8位微型机。
如图2-1是8051单片机的外型。
特征如下:.面向控制的8位CPU 和指令系统.128*8位内部RAM.32可编程I/O线.两个16位定时器/计数器.5个中断源,两个中断优先级.可编程串行通道.低功耗的闲置和掉电模式.一个片内振荡器和时钟电路2.管脚说明:VCC:供电电压。
VSS:接地。
P0口:P0口为一个8位开路双向I/O口,每脚可吸收8TTL门电流。
当P1口的管脚第一次写1时,被定义为高阻输入。
P0能够用于外部程序数据存储器,它可以被定义为数据/地址的第八位。
P1口:P1口是一个内部提供上拉电阻的8位双向I/O口,P1口缓冲器能接收输出4TTL 门电流。
P1口管脚写入1后,被内部上拉为高,可用作输入,P1口被外部下拉为低电平时,将输出电流,这是由于内部上拉的缘故。
在FLASH编程和校验时,P1口作为第八位地址接收。
(图2-1 8051单片机)P2口:P2口为一个内部上拉电阻的8位双向I/O口,P2口缓冲器可接收,输出4个TTL门电流,当P2口被写“1”时,其管脚被内部上拉电阻拉高,且作为输入。
并因此作为输入时,P2口的管脚被外部拉低,将输出电流。
这是由于内部上拉的缘故。
P2口当用于外部程序存储器或16位地址外部数据存储器进行存取时,P2口输出地址的高八位。
在给出地址“1”时,它利用内部上拉优势,当对外部八位地址数据存储器进行读写时,P2口输出其特殊功能寄存器的内容。
P3口:P3口管脚是8个内部上拉电阻的双向I/O口,可接收输出4个TTL门电流。
当P3口写入“1”后,它们被内部上拉为高电平,并用作输入。
作为输入,由于外部下拉为低电平,P3口将输出电流(ILL)这是由于上拉的缘故。
P3口也可作为一些特殊功能口,如下所示:P3.0 RXD(串行输入口)P3.1 TXD(串行输出口)P3.2 /INT0(外部中断0)P3.3 /INT1(外部中断1)P3.4 T0(记时器0外部输入)P3.5 T1(记时器1外部输入)P3.6 /WR(外部数据存储器写选通)P3.7 /RD(外部数据存储器读选通)RST:复位输入。