RTMS微波车检器原理介绍
微波检测器原理
微波检测器原理
微波检测器是一种利用微波信号进行物体探测和测量的设备。
其原理基于微波信号的反射和传播特性。
微波通过天线发射并沿着设定的路径传播,当遇到物体时会发生反射。
检测器将接收到的反射信号与发射信号进行比较,根据信号的变化来判断是否有物体存在。
微波检测器通常采用连续波或脉冲波的发射方式。
连续波微波检测器发送连续的微波信号,通过测量反射信号与发射信号的幅度差异来检测物体的存在。
脉冲波微波检测器发送短暂的脉冲波,通过测量反射信号与发射信号之间的时间差来计算物体与检测器之间的距离。
微波检测器的工作频率通常在几千兆赫到几百千兆赫之间,不同的应用场景会有不同的频率要求。
此外,微波检测器还可以通过调整其敏感度和检测范围来适应不同的应用需求。
微波检测器在许多领域应用广泛,如安防监控、自动门控制、物体计数等。
其原理简单、反应灵敏,被广泛认可为一种可靠的物体检测技术。
远程交通微波雷达检测器(RTMS)的深度解析知识讲解

远程交通微波雷达检测器(R T M S)的深度解析远程交通微波雷达检测器(RTMS)的深度解析一、概述1.1什么是RTMSRTMS(Remote Traffic Microwave Sensor 远程交通微波雷达检测器)是一种用于监测交通状况的再现式雷达装置。
它可以测量微波投影区域内目标的距离,通过距离来实现对多车道的静止车辆和行驶车辆的检测,并且利用雷达线性调频技术原理,对路面发射微波,通过对回波信号进行高速实时的数字化处理分析,检测车流量、速度、车道占有率和车型信息等交通流基本信息的非接触式交通检测设备。
1.2RTMS的应用领域RTMS主要应用于高速公路、城市快速路、普通公路交通流调查站和桥梁的交通参数采集,提供车流量、速度、车道占有率和车型等实时信息,此信息可用隔离接触器连接到控制器或通过串行接口连接到其他系统,为交通控制管理、信息发布等提供数据支持。
1.3RTMS的发展历程1989年加拿大人Dan Manor第一个将雷达技术应用于智能交通行业,发明了微波车辆检测器。
短短十几年间,微波车辆检测器已经经历了几代的变革:从模拟到数字、从单雷达到多雷达、从喇叭天线到平板天线:图错误!文档中没有指定样式的文字。
-1微波车检器发展历程我们从每一次的变革中看到,微波车辆检测器技术的发展和雷达技术、电子技术、计算机技术的发展紧密相关。
从雷达技术的层面上来说,数字阵列雷达技术从上世纪借鉴仿生学开始,在较短的时间内得到不断完善和提高。
进入21世纪后伴随着数字电子技术和计算机处理能力的不断提升,数字阵列雷达的优越性得到了充分的体现:其多功能性、反应速度、分辨率、电子抗干扰能力、多目标追踪/搜索能力等都远优于传统雷达:数字阵列雷达能在极短时间内完成监视空域内的扫瞄,目标更新速率极快;数字阵列雷达分辨率极高,能取得目标精确位置;数字阵列雷达能在恶劣的天气气候条件下正常追踪目标;数字阵列雷达代表着雷达技术发展的必然趋势,它们是近代雷达变革的新技术和新体制的集中体现,是集中了现代电子科学技术各学科成就的高科技系统,所以现代化的精锐武器系统都以阵列的“平板雷达”为标准配备。
车检器原理

车检器原理
车检器是一种用于监测车辆通过情况的设备,其原理主要是通过感应车辆的金属物质来实现。
车检器一般应用于停车场、高速公路、收费站等场所,可以实现车辆的自动识别和计数,提高交通管理效率。
车检器的原理是利用电磁感应原理,当车辆通过车检器时,金属车身会对车检器发出的电磁场产生影响,从而使车检器能够感应到车辆的存在。
车检器主要由线圈和电子设备两部分组成,线圈负责发出电磁场,电子设备则负责接收并处理感应到的信号。
在车辆通过车检器时,线圈会产生一个变化的电磁场,这个变化的电磁场会引起线圈内感应电流的变化。
通过检测感应电流的变化,车检器就能够判断车辆的通过情况。
当车辆通过时,感应电流会发生明显的变化,车检器就会记录下这一次通过的信息。
车检器的工作原理是基于电磁感应的,因此对金属物质的感应比较敏感。
一般情况下,车检器可以感应到金属车身、金属车轮等金属物质,但对于非金属车辆或者非金属物质则无法感应。
因此,在使用车检器时,需要注意车辆的材质,以免影响车检器的正常工作。
除了感应车辆的通过情况外,车检器还可以通过感应到的信号来确定车辆的大小、速度等信息。
这些信息对于交通管理和统计分析都具有重要意义。
通过车检器可以实现对车辆的自动识别和计数,提高了交通管理的效率,也为交通统计提供了便利。
总的来说,车检器是一种通过电磁感应原理来监测车辆通过情况的设备,其原理简单而有效。
通过感应车辆的金属物质,车检器可以实现对车辆的自动识别和计数,提高了交通管理的效率,也为交通统计提供了便利。
在实际应用中,需要注意车辆材质对车检器感应的影响,以确保车检器的正常工作。
RTMS微波车检器原理介绍
知其然,更知其所以然——RTMS微波车检器原理介绍1、前言2008年RTMS微波检测产品纳入百联智达的产品线至今已有4年,到2012年,百联智达仅微波车检器产品销售额已突破两千万。
从国内市场来看,城市ITS 建设项目中微波车检器的需求逐年大幅度增长,高速公路ITS项目上也逐渐开始试点微波车检器的大规模应用。
从微波车检器产品本身来说,国内依旧是以“阵列雷达”与“双雷达”两种技术对抗、以RTMS和SmartSensor两家产品为主流、“国产阵列雷达”和“单雷达”以低价拿小单的特点,形成了目前的主要竞争格局。
相信大家对RTMS微波车检器的各项指标已经熟悉,但我们在跟客户做技术交流时,往往会遇到客户问起一些更深层次的问题,比如“你们的阵列雷达,一共有几个雷达?”、“用了你们的雷达,如果车被挡住了,还能检测到吗?”、“你们的雷达能测速吗?”等等,这就需要我们的售前和销售人员在熟知产品指标的基础上,能够对产品的相关原理有一定的了解,在面对用户的各种奇怪问题时,能够从容应对,体现我们的专业性。
在此,借助内刊这个平台,我将自己搜集到的一些RTMS产品的相关资料分享给大家,期望能够起到抛砖引玉的作用,与各位同事共同学习、提高。
2、RTMS的基本介绍RTMS,即“The Remote Traffic Microwave Sensor”,从字面上翻译过来,就是“远程交通微波探测器”。
这个名字体现了RTMS的三个主要特点:远程检测、专用于交通数据采集、工作在微波频段。
“R”远程检测,这个很好理解:RTMS可以检测几米到几十米内的车辆存在,而不需要像线圈、地磁等那样与车辆近距离接触,所以叫远程检测。
至于交通“T”数据采集方面,路侧安装的RTMS可检测断面上的车辆长度、平均车速、占有率、车型分类、车间距等交通参数,并通过串口周期上传至后端服务器;RTMS还支持通过I/O接口直接输出车辆存在信号,给信号机提供原始数据。
“M”即微波,微波是指频率为300MHz-300GHz的电磁波,换算成波长则是在1米(不含1米)到1毫米之间的电磁波,是无线电波中一个有限频带的简称。
微波测速原理
微波测速原理
微波测速原理是利用微波的特性来测量目标物体的速度。
微波是一种电磁波,具有较高的频率和短的波长。
而物体的运动会引起微波的多普勒频移现象,即物体朝向接收器运动时,接收到的微波频率较高;物体远离接收器运动时,接收到的微波频率较低。
微波测速器通常由一个发射器和一个接收器组成。
发射器会发射出固定频率的微波信号,而接收器则会接收到经过多普勒频移的微波信号。
通过测量接收到的微波频率与发射频率之间的差异,就可以计算出物体的速度。
为了提高测速的准确性和稳定性,需要注意以下几点。
首先,要选择合适的发射频率和接收灵敏度,以使测速范围符合实际应用需求。
其次,要注意减少测速器与其他物体的干扰,以防止误差的出现。
另外,要进行周期性的校准和维护,以确保测速器的正常工作。
微波测速器在交通领域中广泛应用。
例如,在高速公路上设置微波测速器可以实时监测车辆的速度,以便提醒驾驶员遵守交通规则。
此外,微波测速器还可以应用在工业领域,用于测量机械设备的运动速度,以实现自动化控制和监测。
总而言之,微波测速原理通过利用微波的多普勒频移现象,实现了对物体速度的准确测量。
车辆检测器工作原理

车辆检测器工作原理车辆检测器是一种用于监测和控制交通流量的设备。
它可以实时检测路上车辆的数量、车辆的速度、车辆类型等信息,并将这些信息传输到控制中心,以便对交通流量进行管理和调控。
车辆检测器的工作原理基于一系列技术,下面将详细介绍它的工作原理。
车辆检测器主要通过以下几种技术来实现车辆的检测。
1. 磁性感应技术:磁性感应技术是车辆检测器中最常用的技术之一。
它通过埋设在地面下的线圈,利用车辆通行时的磁场变化来检测车辆的存在。
当车辆经过线圈时,由于车辆的金属体对磁场的敏感性,线圈中的感应电流发生了变化,从而可以检测到车辆的存在和通过的时间。
2. 微波雷达技术:微波雷达技术是一种利用微波信号来检测车辆的存在的技术。
车辆检测器通过发射微波信号,并接收被车辆反射回来的信号来确定车辆的位置和速度。
微波雷达技术具有高精度和不受天气影响的特点,因此在一些复杂环境下常被广泛应用。
3. 视频图像处理技术:视频图像处理技术是近年来发展起来的一种车辆检测技术。
它通过设置摄像头来获取道路上的图像,并利用图像处理算法来检测和跟踪车辆。
视频图像处理技术可以通过识别车辆的外形和运动轨迹来实现车辆的检测。
4. 压力感应技术:压力感应技术是一种通过检测车辆通行时对路面施加的压力来确定车辆存在的技术。
它通常通过在道路上安装感应器来实现。
当车辆通行时,感应器会检测到路面所受到的压力变化,并将其转化为电信号进行分析和处理,从而实现车辆的检测和统计。
这些技术在车辆检测器中常常结合使用,以提高车辆检测的准确性和可靠性。
通过收集车辆的数量、速度、类型等信息,交通管理者可以及时了解道路上的交通状况,从而采取相应的措施来调度交通流量,提升道路通行效率。
车辆检测器不仅广泛应用于城市道路的交通管理中,也被用于高速公路的车流量监测、停车场的车位管理等场景中。
它的工作原理的不断改进和创新,使得车辆检测器在智能交通系统中的应用越来越广泛且更加精准。
总而言之,车辆检测器通过磁性感应、微波雷达、视频图像处理和压力感应等技术,实现对道路上车辆的检测和统计。
高速公路微波车辆检测器的原理分析与应用
高速公路微波车辆检测器的原理分析与应用作者:韩华党江杰来源:《物联网技术》2012年第09期摘要:在高速公路管理由数字化进入智能化的关键时期,交通参数的采集具有重要作用。
文中介绍了微波车辆检测器的工作原理,并结合高速公路运行管理的需要,对微波车辆检测器的参数设置和使用方法进行了介绍,同时分别从断面、道路及路网管理三个方面对采集获取的交通数据的应用进行了探讨。
关键词:智能高速公路;微波车辆检测器;原理分析;应用中图分类号:U491 文献标识码:A 文章编号:2095-1302(2012)09-0049-03Principle analysis and application of road traffic microwave sensor for highwayHAN Hua1, DANG Jiang-jie2(1.Shaanxi Baohan Expressway Construction Management Co.,Ltd., Baoji 721006, China;2.S chool of Electronic and Control Engineering, Chang’an University, Xi’an 710064, China)Abstract: Highway management has come into the intelligentization era from the digitization. It is very important to collect traffic parameters. The paper describes the working principles of the road traffic microwave sensor (RTMS). Combined with the needs of highway operation and management, parameters setting for RTMS and its usage are introduced. Application of traffic data collection from road section, roads and traffic network management are discussed. It is very important to analyze the traffic data in the actual operation.Keywords: intelligent highway; road traffic microwave sensor; principle analysis; application0 引言随着我国经济的快速发展,高速公路的通车里程不断增加。
RTMS工作原理、功能及应用

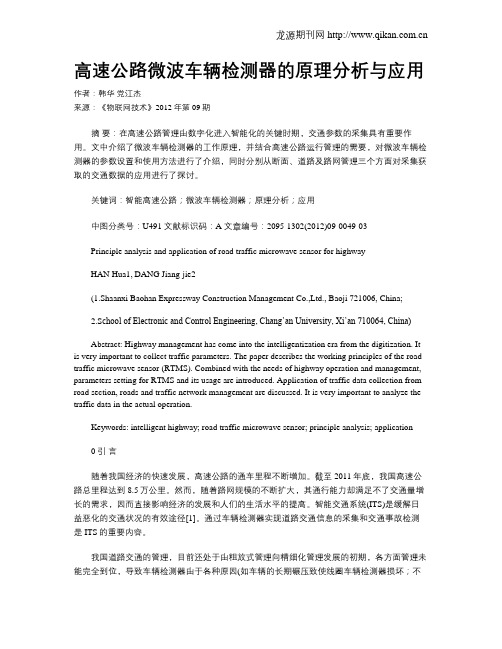
40 Range sliceRTMS工作原理、功能及应用RTMS(Remote Traffic Microwave Sensor 远程交通微波雷达检测器)是一种用于监测交通状况的再现式雷达装置。
它可以测量微波投影区域内目标的距离,通过距离来实现对多车道的静止车辆和行驶车辆的检测。
RTMS在微波束的发射方向上以2米(7英尺)为一层面分层面探测物体,RTMS微波束的发射角为40度,方位角为15度。
安装好以后,它向公路投影形成一个可以分为32个层面的椭圆形波束,这个椭圆的宽度取决于选择的工作方式,并因检测器安装角度和安装距离的不同稍有变化。
RTMS 微波束及其投影RTMS 有两种安装设置和多种工作模式。
侧向安装时, 设备安装在路旁的杆子上, 保持微波的投影与车道正交, 分层面的波束能够提供相互独立的八个探测区域, 可适应于不同道路状况。
被探测车道可以被定义为一个或者多个微波层面。
波束覆盖区的宽度决定了探测道的长度。
正向安装时, 设备安装在龙门架上, 其微波束发射方向与车辆行驶方向一致。
此种设置检测器不能区分车道,因此必须通过调节好瞄准角度来使微波投影对应单一的车道。
RTMS 微波区域内的回波信号1.1车辆检测1.1.1 检测原理RTMS 接收到微波投影区域内各种表面的连续不断的回波, 如人行道, 栅栏, 车辆以及树木等。
在每一个微波层面内的固定物体回波信号将形成背景阈值, 如果回波信号的强度高于该微波层面的背景阈值,则表明有车辆存在。
路侧安装方式 龙门架或者类似位置 正向安装方式 立柱在RTMS 设置时,“背景获取”可在30秒内完成。
在正常使用时也会时常调节。
例如,来自住手车辆的回波信号在30分钟内成为背景,检测将被终止,车道对应的输出开关将被释放。
相反的, 当车辆离开时,背景阈值会很快降至初始状态,新的背景阈值在30秒内形成。
最强的回波信号来自车辆的垂直表面的反射,水平表面(如车顶)将散射微波,回波信号较弱。
RTMS工作原理、功能及应用

RTMS工作原理RTMS(Remote Traffic Microwave Sensor远程交通微波雷达检测器)是一种用于监测交通状况的再现式雷达装置。
它可以测量微波投影区域内目标的距离,通过距离来实现对多车道的静止车辆和行驶车辆的检测。
RTMS在微波束的发射方向上以2米(7英尺)为一层面分层面探测物体,RTMS微波束的发射角为40度,方位角为15度。
安装好以后,它向公路投影形成一个可以分为32个层面的椭圆形波束,这个椭圆的宽度取决于选择的工作方式,并因检测器安装角度和安装距离的不同稍有变化。
RTMS 微波束及其投影RTMS 有两种安装设置和多种工作模式。
侧向安装时, 设备安装在路旁的杆子上, 保持微波的投影与车道正交, 分层面的波束能够提供相互独立的八个探测区域, 可适应于不同道路状况。
被探测车道可以被定义为一个或多个微波层面。
波束覆盖区的宽度决定了探测道的长度。
正向安装时, 设备安装在龙门架上, 其微波束发射方向与车辆行驶方向一致。
此种设置检测器不能区分车道,因此必须通过调节好瞄准角度来使微波投影对应单一的车道。
路侧安装方式RTMS微波区域内的回波信号RTMS接收到微波投影区域内各种表面的连续不断的回波, 如人行道, 栅栏, 车辆以及树木等。
在每一个微波层面内的固定物体回波信号将形成背景阈值, 如果回波信号的强度高于该微波层面的背景阈值,则表明有车辆存在。
RTMS系统工作流程RTMS系统工作流程简要叙述如下:1.流程开始,RTMS、有线或无线Modem和计算机处于正常工作状态(如果采用太阳能电池供电、还要求太阳能电池处于正常工作状态)。
2.车辆通过RTMS检测器的检测区,其车辆长度、车速、占有率、车型分类交通信息及设备状态等技术参数被RTMS检测到。
3.PC机通过有线或无线Modem与RTMS通信,读取交通信息,并进行处理。
同时监测RTMS工作状态。
4.下一个流程开始。
微波探测器工作原理

微波探测器工作原理
微波探测器是一种基于微波辐射的探测设备,用于检测和测量目标物体的性质和特征。
其工作原理主要包括以下几个方面:
发射:微波探测器通过天线发射一定频率的微波信号。
发射的微波信号通过放大器进行增强,然后由天线辐射到空间中。
传播:发射的微波信号在空间中以电磁波的形式传播,通过反射、绕射、散射等现象在目标物体表面产生反射。
接收:探测器天线接收目标物体反射回来的微波信号。
接收到的微波信号经过天线引导到接收器。
信号处理:接收器对接收到的微波信号进行放大、滤波、解调等处理,得到目标物体的相关信息,如目标的位置、形状、尺寸等。
分析与判断:根据信号处理后得到的信息,通过特定的算法和模型进行分析和判断,确定目标物体的性质和特征。
输出:根据分析和判断的结果,微波探测器可以通过显示器、报警器等方式输出结果,供用户进行查看和处理。
需要注意的是,微波探测器的工作原理可以根据具体的型号、技术和应用而有所不同,上述原理仅为一般性描述。
车检器原理

车检器原理
车检器是一种用于监测和控制交通流量的设备,它基于一系列原理来工作。
首先,车检器利用电磁感应原理来检测通过车辆。
它使用一个电磁圈或线圈埋入道路或安装在路面上,当车辆经过时,会改变感应线圈中的电磁场。
车检器会通过检测电磁场的变化来确定车辆的存在及其通过的方向。
其次,车检器还可以使用红外线或激光射束来检测车辆。
它会发射一个红外线或激光束,并使用一个接收器来感知这个束被车辆阻挡的情况。
当车辆通过时,它会导致束被阻挡,从而被检测到。
此外,车检器还可以利用声波来检测车辆。
它会发射一个声波信号,并根据回声时间来确定车辆的存在和距离。
当声波信号碰撞到车辆并反弹回来时,车检器会接收并分析这个信号,从而确定车辆的位置和速度。
综上所述,车检器基于电磁感应、红外线/激光射束或声波等
原理来检测车辆。
通过这些原理,它能够判断车辆的存在、通过的方向、距离和速度等信息。
这些信息可以用来监测交通流量并进行交通信号控制,以提高道路的使用效率和安全性。
微波车辆检测器的工作原理
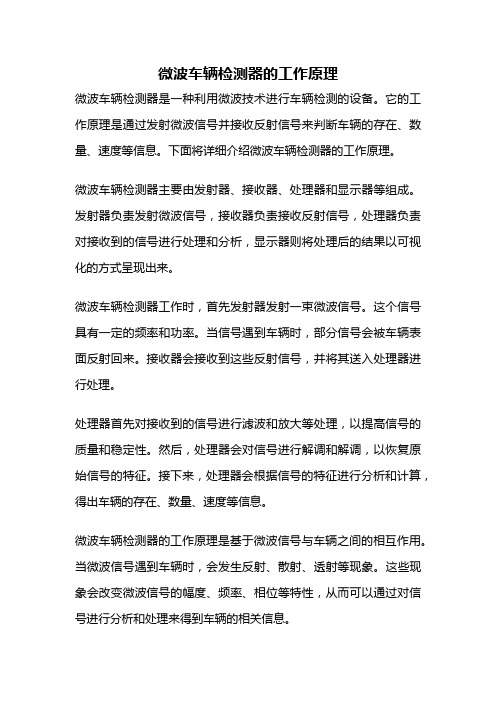
微波车辆检测器的工作原理微波车辆检测器是一种利用微波技术进行车辆检测的设备。
它的工作原理是通过发射微波信号并接收反射信号来判断车辆的存在、数量、速度等信息。
下面将详细介绍微波车辆检测器的工作原理。
微波车辆检测器主要由发射器、接收器、处理器和显示器等组成。
发射器负责发射微波信号,接收器负责接收反射信号,处理器负责对接收到的信号进行处理和分析,显示器则将处理后的结果以可视化的方式呈现出来。
微波车辆检测器工作时,首先发射器发射一束微波信号。
这个信号具有一定的频率和功率。
当信号遇到车辆时,部分信号会被车辆表面反射回来。
接收器会接收到这些反射信号,并将其送入处理器进行处理。
处理器首先对接收到的信号进行滤波和放大等处理,以提高信号的质量和稳定性。
然后,处理器会对信号进行解调和解调,以恢复原始信号的特征。
接下来,处理器会根据信号的特征进行分析和计算,得出车辆的存在、数量、速度等信息。
微波车辆检测器的工作原理是基于微波信号与车辆之间的相互作用。
当微波信号遇到车辆时,会发生反射、散射、透射等现象。
这些现象会改变微波信号的幅度、频率、相位等特性,从而可以通过对信号进行分析和处理来得到车辆的相关信息。
微波车辆检测器的工作原理具有以下几个特点:1. 非接触式检测:微波车辆检测器不需要与车辆直接接触,只需要发射微波信号并接收反射信号即可。
这种非接触式的检测方式不会对车辆造成任何影响,同时也减少了设备的磨损和维护成本。
2. 高精度检测:微波车辆检测器可以实现对车辆的精确检测。
通过对微波信号的分析和处理,可以得到车辆的存在、数量、速度等信息。
这些信息对于交通管理和道路设计等方面具有重要的参考价值。
3. 抗干扰能力强:微波车辆检测器具有较强的抗干扰能力。
由于微波信号的频率较高,相对于其他电磁信号来说,对于环境中的干扰信号具有较好的抑制能力。
因此,在复杂的交通环境中,微波车辆检测器能够准确地检测到车辆的存在。
4. 天气适应性强:微波车辆检测器对天气的适应性较好。
车检器的工作原理
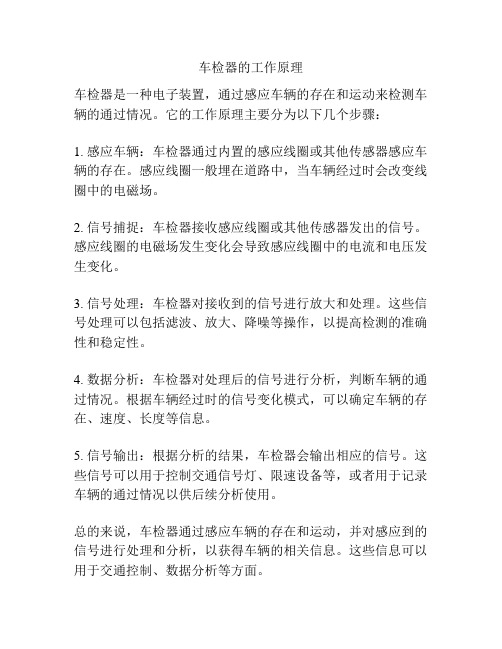
车检器的工作原理
车检器是一种电子装置,通过感应车辆的存在和运动来检测车辆的通过情况。
它的工作原理主要分为以下几个步骤:
1. 感应车辆:车检器通过内置的感应线圈或其他传感器感应车辆的存在。
感应线圈一般埋在道路中,当车辆经过时会改变线圈中的电磁场。
2. 信号捕捉:车检器接收感应线圈或其他传感器发出的信号。
感应线圈的电磁场发生变化会导致感应线圈中的电流和电压发生变化。
3. 信号处理:车检器对接收到的信号进行放大和处理。
这些信号处理可以包括滤波、放大、降噪等操作,以提高检测的准确性和稳定性。
4. 数据分析:车检器对处理后的信号进行分析,判断车辆的通过情况。
根据车辆经过时的信号变化模式,可以确定车辆的存在、速度、长度等信息。
5. 信号输出:根据分析的结果,车检器会输出相应的信号。
这些信号可以用于控制交通信号灯、限速设备等,或者用于记录车辆的通过情况以供后续分析使用。
总的来说,车检器通过感应车辆的存在和运动,并对感应到的信号进行处理和分析,以获得车辆的相关信息。
这些信息可以用于交通控制、数据分析等方面。
微波车辆检测器之原理篇
微波车辆检测器之原理篇(一)先来点出场旁白吧☀:一直想静下来写一点微波车辆检测器相关的技术文档,只是不知道从哪开始着手,在这个行业苦行僧一般摸索了这么多年,只能说雷达探测技术这门学科水太深,咱还在入门级里面摸索,还好咱有的是耐心,继续往前摸索吧。
今天不用加班啦,猫在家里先写点微波车辆检测器一些原理知识吧,也算是一个总结了。
(希望2016会更好)。
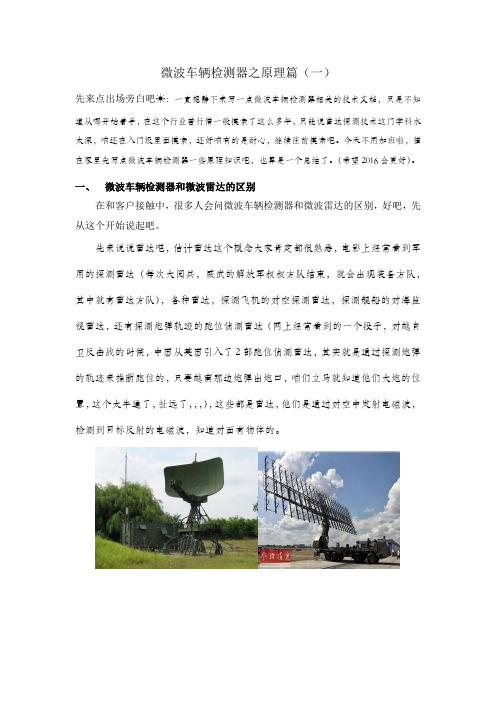
一、微波车辆检测器和微波雷达的区别在和客户接触中,很多人会问微波车辆检测器和微波雷达的区别,好吧,先从这个开始说起吧。
先来说说雷达吧,估计雷达这个概念大家肯定都很熟悉,电影上经常看到军用的探测雷达(每次大阅兵,威武的解放军叔叔方队结束,就会出现装备方队,其中就有雷达方队),各种雷达,探测飞机的对空探测雷达,探测舰船的对海监视雷达,还有探测炮弹轨迹的跑位侦测雷达(网上经常看到的一个段子,对越自卫反击战的时候,中国从英国引入了2部跑位侦测雷达,其实就是通过探测炮弹的轨迹来推断跑位的,只要越南那边炮弹出炮口,咱们立马就知道他们大炮的位置,这个太牛逼了,扯远了,,,),这些都是雷达,他们是通过对空中发射电磁波,检测到目标反射的电磁波,知道对面有物体的。
微波车辆检测器,确切的说是一种工作在微波波段的雷达探测设备;意思是,它首先就是雷达的一种,只不过它工作的频段在微波波段(大部分是24GHZ),只不过它探测的目标是车辆。
于是乎:微波,雷达,车辆,好吧;我们就喊这玩意微波车辆检测器,当然喊他是微波雷达,一点也不冤枉。
二、雷达工作原理雷达就是一种通过发射一定频率的电磁波到空气中,通过检测回波来探测物体的设备(好吧,为了不被骂,还有一种雷达是被动探测的,就不说了)。
是雷达就会发射电磁波,好比手电筒,在黑夜中打出一个光束,人眼睛通过物体反射回来的可见光波段波束,发现目标的。
这就是雷达,通过发射人眼看不到的电磁波来探测目标的,并可以检测目标的特征,比如大小,距离,速度等信息。
远程交通微波雷达检测器(RTMS)深度解析
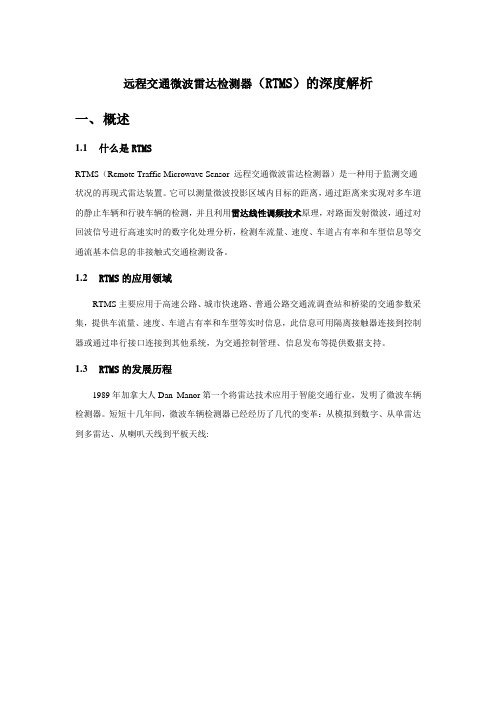
远程交通微波雷达检测器(RTMS)的深度解析一、概述1.1什么是RTMSRTMS(Remote Traffic Microwave Sensor 远程交通微波雷达检测器)是一种用于监测交通状况的再现式雷达装置。
它可以测量微波投影区域内目标的距离,通过距离来实现对多车道的静止车辆和行驶车辆的检测,并且利用雷达线性调频技术原理,对路面发射微波,通过对回波信号进行高速实时的数字化处理分析,检测车流量、速度、车道占有率和车型信息等交通流基本信息的非接触式交通检测设备。
1.2RTMS的应用领域RTMS主要应用于高速公路、城市快速路、普通公路交通流调查站和桥梁的交通参数采集,提供车流量、速度、车道占有率和车型等实时信息,此信息可用隔离接触器连接到控制器或通过串行接口连接到其他系统,为交通控制管理、信息发布等提供数据支持。
1.3RTMS的发展历程1989年加拿大人Dan Manor第一个将雷达技术应用于智能交通行业,发明了微波车辆检测器。
短短十几年间,微波车辆检测器已经经历了几代的变革:从模拟到数字、从单雷达到多雷达、从喇叭天线到平板天线:模拟单雷达车辆检测器(感应式)数字单雷达车辆检测器数字双雷达车辆检测器阵列雷达车辆检测系统阵列雷达视频等技术融合综合车检系统图错误!文档中没有指定样式的文字。
-1微波车检器发展历程我们从每一次的变革中看到,微波车辆检测器技术的发展和雷达技术、电子技术、计算机技术的发展紧密相关。
从雷达技术的层面上来说,数字阵列雷达技术从上世纪借鉴仿生学开始,在较短的时间内得到不断完善和提高。
进入21世纪后伴随着数字电子技术和计算机处理能力的不断提升,数字阵列雷达的优越性得到了充分的体现:其多功能性、反应速度、分辨率、电子抗干扰能力、多目标追踪/搜索能力等都远优于传统雷达:数字阵列雷达能在极短时间内完成监视空域内的扫瞄,目标更新速率极快;数字阵列雷达分辨率极高,能取得目标精确位置;数字阵列雷达能在恶劣的天气气候条件下正常追踪目标;数字阵列雷达代表着雷达技术发展的必然趋势,它们是近代雷达变革的新技术和新体制的集中体现,是集中了现代电子科学技术各学科成就的高科技系统,所以现代化的精锐武器系统都以阵列的“平板雷达”为标准配备。
RTMSG4车检器方案
RTMS ™微波车辆检测方案RTMS ™微波车辆检测设计方案目录前言.................................... 3一、背景分析........................... 41.1.为什么选用RTMS™微波车检器 ...................................................................... 4微波车检器发展简史: ............................................................................................... 61.2.公司简介.......................................................................................................... 7三、设计方案.......................... 103.1总体设计.............................................................................. 错误!未定义书签。
3.2车流量数据采集 ............................................................................................ 103.3RTMS™系统工作流程.................................................................................. 113.4RTMS™G4检测器主要技术参数.................................................................. 123.5系统优势....................................................................................................... 133.6数据转发器 ................................................................................................... 153.7售后服务....................................................................................................... 153.8培训.............................................................................................................. 163.9资料.............................................................................................................. 16前言随着我国智能交通系统概念的日益普及和应用的迅速发展,基础交通信息的采集和交通事故检测作为智能交通系统的重中之重来优先发展。
微波车辆检测器技术方案
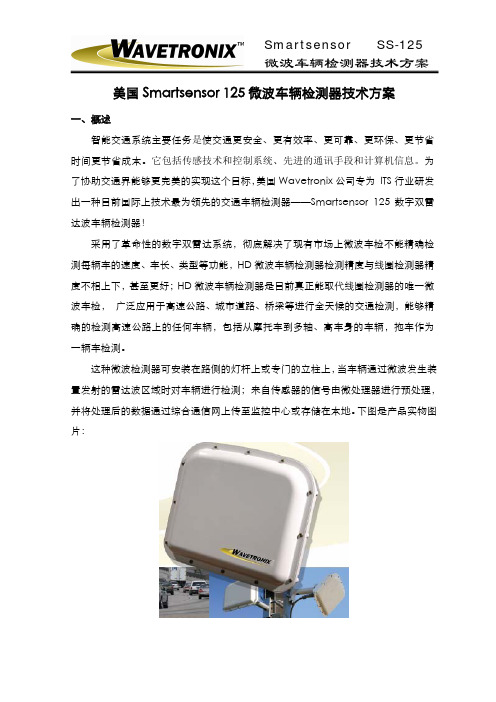
美国Smartsensor 125微波车辆检测器技术方案一、概述智能交通系统主要任务是使交通更安全、更有效率、更可靠、更环保、更节省时间更节省成本。
它包括传感技术和控制系统、先进的通讯手段和计算机信息。
为了协助交通界能够更完美的实现这个目标,美国Wavetronix公司专为 ITS行业研发出一种目前国际上技术最为领先的交通车辆检测器——Smartsensor 125数字双雷达波车辆检测器!采用了革命性的数字双雷达系统,彻底解决了现有市场上微波车检不能精确检测每辆车的速度、车长、类型等功能,HD微波车辆检测器检测精度与线圈检测器精度不相上下,甚至更好;HD微波车辆检测器是目前真正能取代线圈检测器的唯一微波车检, 广泛应用于高速公路、城市道路、桥梁等进行全天候的交通检测,能够精确的检测高速公路上的任何车辆,包括从摩托车到多轴、高车身的车辆,拖车作为一辆车检测。
这种微波检测器可安装在路侧的灯杆上或专门的立柱上,当车辆通过微波发生装置发射的雷达波区域时对车辆进行检测;来自传感器的信号由微处理器进行预处理,并将处理后的数据通过综合通信网上传至监控中心或存储在本地。
下图是产品实物图片:二、产品技术优势:1、享有专利权的数字双雷达波检测技术,与模拟波不同,它每1s发射100万次雷达波可以精确定位车辆,同时可以跨越中央隔离带的防眩板、树丛及隔离护栏等障碍检测到部分被遮挡的车辆,从而大大降低了隔离带对检测精度的影响!2、在一些高速公路或桥梁上,有的路段无法提供3米以上的侧移量,Smartsensor 125则可以解决这一问题,因为它只需要1.8的侧移量,就可以检测所要检测的数据。
3、Smartsensor 125微波车辆检测器可以检测双向10个车道的交通数据,包括车流量、单车速度、平均速度、车型分类、车道占有率等交通数据。
它内部设有两个数字雷达,在检测路面上投映两个微波带,每当车辆经过时,它会根据车辆通过两个雷达的时间精确地计算出每辆车的速度及其它所检测到的交通数据,还可以在管理软件中看到实时的数据。
远程交通微波雷达检测器(RTMS)深度解析
远程交通微波雷达检测器(RTMS)的深度解析一、概述1.1什么是RTMSRTMS(Remote Traffic Microwave Sensor 远程交通微波雷达检测器)是一种用于监测交通状况的再现式雷达装置。
它可以测量微波投影区域内目标的距离,通过距离来实现对多车道的静止车辆和行驶车辆的检测,并且利用雷达线性调频技术原理,对路面发射微波,通过对回波信号进行高速实时的数字化处理分析,检测车流量、速度、车道占有率和车型信息等交通流基本信息的非接触式交通检测设备。
1.2RTMS的应用领域RTMS主要应用于高速公路、城市快速路、普通公路交通流调查站和桥梁的交通参数采集,提供车流量、速度、车道占有率和车型等实时信息,此信息可用隔离接触器连接到控制器或通过串行接口连接到其他系统,为交通控制管理、信息发布等提供数据支持。
1.3RTMS的发展历程1989年加拿大人Dan Manor第一个将雷达技术应用于智能交通行业,发明了微波车辆检测器。
短短十几年间,微波车辆检测器已经经历了几代的变革:从模拟到数字、从单雷达到多雷达、从喇叭天线到平板天线:模拟单雷达车辆检测器(感应式)数字单雷达车辆检测器数字双雷达车辆检测器阵列雷达车辆检测系统阵列雷达视频等技术融合综合车检系统图错误!文档中没有指定样式的文字。
-1微波车检器发展历程我们从每一次的变革中看到,微波车辆检测器技术的发展和雷达技术、电子技术、计算机技术的发展紧密相关。
从雷达技术的层面上来说,数字阵列雷达技术从上世纪借鉴仿生学开始,在较短的时间内得到不断完善和提高。
进入21世纪后伴随着数字电子技术和计算机处理能力的不断提升,数字阵列雷达的优越性得到了充分的体现:其多功能性、反应速度、分辨率、电子抗干扰能力、多目标追踪/搜索能力等都远优于传统雷达:数字阵列雷达能在极短时间内完成监视空域内的扫瞄,目标更新速率极快;数字阵列雷达分辨率极高,能取得目标精确位置;数字阵列雷达能在恶劣的天气气候条件下正常追踪目标;数字阵列雷达代表着雷达技术发展的必然趋势,它们是近代雷达变革的新技术和新体制的集中体现,是集中了现代电子科学技术各学科成就的高科技系统,所以现代化的精锐武器系统都以阵列的“平板雷达”为标准配备。
遥感微波检测器(RTMS)简介
遥感微波检测器(RTMS)简介
罗晓辉;王忠仁
【期刊名称】《公路交通科技》
【年(卷),期】1997(14)4
【摘要】遥感微波检测器(RTMS)简介罗晓辉王忠仁(北京建筑工程学院北京100044)(交通部公路科学研究所北京100088)1简介RTMS(RemoteTraficMicrowaveSensor)是国外近几年开发出的具有智能、大范围的存在型检测器。
它可通...
【总页数】3页(P62-64)
【关键词】交通管理;智能交通系统;遥感微波检测器
【作者】罗晓辉;王忠仁
【作者单位】北京建筑工程学院;交通部公路科学研究所
【正文语种】中文
【中图分类】U491.116
【相关文献】
1.微波遥感技术的兴起与雷达图像的应用——“成像雷达微波遥感知识”介绍之一[J], 赵立平
2.智能交通雷达检测器:远程交通微波传感器(RTMS) [J], 衣加望;侯慧林
3.中国科学院微波遥感技术重点实验室简介 [J],
4.深圳国涛:RTMS微波车辆检测器全天候、免维修,为用户消除使用中的顾虑
[J],
5.城市高速道路微波检测器RTMS的检测精度分析 [J], 陈德望;高海军;陈龙;章长彪;侯慧林
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
知其然,更知其所以然
——RTMS微波车检器原理介绍1、前言
2008年RTMS微波检测产品纳入百联智达的产品线至今已有4年,到2012年,百联智达仅微波车检器产品销售额已突破两千万。
从国内市场来看,城市ITS 建设项目中微波车检器的需求逐年大幅度增长,高速公路ITS项目上也逐渐开始试点微波车检器的大规模应用。
从微波车检器产品本身来说,国内依旧是以“阵列雷达”与“双雷达”两种技术对抗、以RTMS和SmartSensor两家产品为主流、“国产阵列雷达”和“单雷达”以低价拿小单的特点,形成了目前的主要竞争格局。
相信大家对RTMS微波车检器的各项指标已经熟悉,但我们在跟客户做技术交流时,往往会遇到客户问起一些更深层次的问题,比如“你们的阵列雷达,一共有几个雷达?”、“用了你们的雷达,如果车被挡住了,还能检测到吗?”、“你们的雷达能测速吗?”等等,这就需要我们的售前和销售人员在熟知产品指标的基础上,能够对产品的相关原理有一定的了解,在面对用户的各种奇怪问题时,能够从容应对,体现我们的专业性。
在此,借助内刊这个平台,我将自己搜集到的一些RTMS产品的相关资料分享给大家,期望能够起到抛砖引玉的作用,与各位同事共同学习、提高。
2、RTMS的基本介绍
RTMS,即“The Remote Traffic Microwave Sensor”,从字面上翻译过来,就是“远程交通微波探测器”。
这个名字体现了RTMS的三个主要特点:远程检测、专用于交通数据采集、工作在微波频段。
“R”远程检测,这个很好理解:RTMS可以检测几米到几十米内的车辆存在,而不需要像线圈、地磁等那样与车辆近距离接触,所以叫远程检测。
至于交通“T”数据采集方面,路侧安装的RTMS可检测断面上的车辆长度、平均车速、占有率、车型分类、车间距等交通参数,并通过串口周期上传至后端
服务器;RTMS还支持通过I/O接口直接输出车辆存在信号,给信号机提供原始数据。
“M”即微波,微波是指频率为300MHz-300GHz的电磁波,换算成波长则是在1米(不含1米)到1毫米之间的电磁波,是无线电波中一个有限频带的简称。
微波频率比一般的无线电波频率高,但低于可见光,通常也称为“超高频电磁波”。
RTMS的X3的发射波中心频率在10.525GHz,G4的发射波中心频率在24.125GHz,都处于微波频段,因此被称为微波车检器。
类似的设备还有声波车检器、超声波车检器,分别工作在声波(20Hz至20000Hz)频段和超声波(大于20000Hz)频段。
电磁波谱图
微波作为一种电磁波也具有波粒二象性。
微波的基本性质通常呈现为穿透、反射、吸收三个特性:对于玻璃、塑料和瓷器等非金属物体,微波几乎是穿越而不被吸收;对于水和食物等就会吸收微波而使自身发热(例如微波炉的应用);而对车辆外壳等金属类东西,则会反射微波。
衍射
另外,所有波的另一特性是“衍射”,也叫绕射,即波遇到障碍物或小孔后通过散射继续传播的现象,一般来说,孔隙越小,波长越大,这种现象就越显著。
微波车检器的波长一般在1cm-2cm,由于货车的体积一般比较大,当微波的波束在经过货车边沿时,同样会产生衍射现象,如下图。
凭借高灵敏度接收天线,RTMS 能够接收到二次衍射之后的被遮挡车辆的反射波,因此,RTMS微波车检器安装在路侧做交通数据采集时,能够解决一部分的大车遮挡问题,这是RTMS微波车检器的独特优势。
大车遮挡情况下检测
正是基于微波的上述特性,RTMS能够可靠的探测到检测区域内的金属物体存在,而不受大型车辆、非金属物体、行人的干扰。
3、关于雷达
在向客户介绍我们的微波车检器时,我们总是说“阵列雷达”、“单雷达”,
我们的竞争对手有“双雷达”,有时候更是直接以“雷达”来代替。
但实际上“雷达”只代表了RTMS的一种工作方式,而“阵列”、“单”、“双”则说明了雷达天线的形式。
“雷达”是英文radar的音译,
为Radio Detection And Ranging的缩
写,意思是一种无线电检测和测距
的电子设备,其原理是雷达设备的
发射机通过天线把电磁波能量射向
空间某一方向,处在此方向上的物
体反射碰到的电磁波;雷达天线接
收此反射波,送至接收设备进行处
理,提取有关该物体的某些信息(目标物体至雷达的距离,距离变化率或径向速度、方位、高度等)。
●测量距离实际是测量发射脉冲与回波脉冲之间的时间差,因电磁波以光
速传播,据此就能换算成目标的精确距离。
●测量目标方位是利用天线的尖锐方位波束测量。
测量仰角靠窄的仰角波
束测量。
根据仰角和距离就能计算出目标高度。
●测量速度是雷达根据自身和目标之间有相对运动产生的频率多普勒效
应原理。
雷达接收到的目标回波频率与雷达发射频率不同,两者的差值
称为多普勒频率。
从多普勒频率中可提取的主要信息之一是雷达与目标
之间的距离变化率。
当目标与干扰杂波同时存在于雷达的同一空间分辨
单元内时,雷达利用它们之间多普勒频率的不同能从干扰杂波中检测和
跟踪目标。
从工作方式上来讲,RTMS微波车检器属于FM-CW Radar(调频连续波雷达),即通过对连续波进行频率调制来获得距离与速度信息的雷达体制,其特点是具有高距离分辨率、低发射功率、高接收灵敏度、结构简单等优点,不存在距离盲区,具有比脉冲雷达更好的反隐身、抗背景杂波及抗干扰能力的特点,且特别适用于近距离应用。
“雷达”系统自始至终都是首先服务于军事应用的,20世纪初雷达的概念开始兴起,几十年间经历了模拟雷达-数字雷达-相控阵雷达多个主要的技术发展阶段,其产品种类繁多,分类的方法也非常复杂。
从1989年加拿大人Dan Manor 第一个将雷达技术应用于智能交通行业,发明了微波车辆检测器。
短短十几年间,微波车辆检测器伴随着军用雷达技术的民用化,已经经历了几代的变革:
从模拟到数字、从单雷达到多雷达、从喇叭天线到平板天线:我们从每一次的变革中看到,微波车辆检测器技术的发展和雷达技术、电子技术、计算机技术的发展紧密相关。
从雷达技术的层面上来说,数字阵列雷达技术从上世纪借鉴仿生学开始,在较短的时间内得到不断完善和提高。
进入21世纪后伴随着数字电子技术和计算机处理能力的不断提升,数字阵列雷达的优越性得到了充分的体现:其多功能性、反应速度、分辨率、电子抗干扰能力、多目标追踪/搜索能力等都远优于传统雷达:
●数字阵列雷达能在极短时间内完成监视空域内的扫瞄,目标更新速率极
快;
●数字阵列雷达分辨率极高,能取得目标精确位置;
●数字阵列雷达能在恶劣的天气气候条件下正常追踪目标;
数字阵列雷达代表着雷达技术发展的必然趋势,它们是近代雷达变革的新技术和新体制的集中体现,是集中了现代电子科学技术各学科成就的高科技系统,所以现代化的精锐武器系统都以阵列的“平板雷达”为标准配备。
RTMS借鉴了高科技阵列雷达科技的精髓,创新性地将阵列天线技术应用于微波车辆检测器中,研发出了RTMS第四代产品-G4阵列雷达微波车辆检测器。
G4采用8×8阵列天线,64个阵列天线轮询工作,每个天线均可完成微波信号发射与接收功能。
发射/接收天线
接收天线
发射天线RTMS G4阵列天线“双雷达”的天线
4、RTMS的工作流程
上文介绍了RTMS微波车检器的基本情况,接下来我们再说说RTMS是如何工作的。
1.微波波束、层面与微层面
RTMS G4在微波束的发射方向上以0.38米为一层面分层面探测物体,RTMS G4微波束的发射角为50度,方位角为12度。
安装好以后,它向公路投影形成一个可以分为254个层面的椭圆形波束。
它可以测量微波投影区域内目标的距离,通过距离来实现对多个车道静止车辆和行驶车辆的检测。
系统不但可以自动识别并划分微层面来定义检测区域,而且用户可以手动调整微层面,以使得检测区域能够在一个精细的范围内进行调整: 使检测区域和车道、或车行线路非常契合;
有效屏蔽中央隔离带、防眩光板、交通设施带来的影响;
2.RTMS的工作过程
首先,RTMS在通电开机后自动进行背景学习,接收天线检测到路面的回波信号后,会根据回波信号的强弱自动生成背景阈值。
当有车辆经过检测断面时,由于车辆近侧面回波信号强度高于背景阈值,则判断该车辆所在车道有目标存在。
目标车辆驶离检测区域,车检器接收的回波信号恢复到背景阈值以下,等待下一次检测,同时将车流量、时间占用数据记录到检测器内部的缓存中,待记录周期结束后输出结果。
RTMS的工作状态就是以一个较高的频率重复上述的工作过程:X3在高速公路/快速路应用中采样频率是5次/秒,在城市路口应用中的采样频率是1次/秒;而采用阵列雷达天线技术的G4的采样周期则高达800次/秒。
RTMS工作示意图如下。
车辆经过检测区域时,RTMS会采集到车辆的车头、车身、车尾的多个数据。
得
益于超高的探测频率,以及
0.38米的雷达分辨率,RTMS
能够适应5-250Km/h的车速
范围,在车辆缓行甚至交通
拥堵的情况下,RTMS依旧
可以正常工作。
以上就是关于RTMS微波车检器原理的基本介绍,在此分享给大家,希望能够对大家的工作提供帮助,也希望各位同仁能够结合自己在实际工作中遇到的问题,对此加以补充完善,进而使本文能够起到抛砖引玉的作用。