标准工时——MOD法
标准工时及MOD法培训教材

15cm M3
30cm M4
45cm M5
M O D 法 基 本 图
终
G0
G1
结
动 作 L1 其 他 动 作 R2
2-6Kg
需要注 意力的 动作
P 2 (注意)
G 3 (注意)
P0
不需要 注意力 的动作
E2
(独)
P 5 (注意)
D3
(独)
Yes
A4
(独)
W5
No F3 C 4 (独) B 17 S 30
表示用手指的第3个关节前的部分进行的动作,时间值为1MOD,移动距离
为2.5cm。 把开关拨到on(off)的位置;回转小旋钮;抓住空气传动器的旋钮;用手指
拧螺母;用手指擦密封条。
手指动作M1表示手指的一次动作。对于用手指将开关拨到on(off)或用手 指旋转螺母时,要观察手指进行了几次动作。
第二部分:标准工时设定 ㈠标准工时的计算
标准工时的设定方法大致分为经验估算及科学的时间分析与时间预置 (PTS)等。那么现场观测的时间是如何成为标准工时的呢?总体需要两个 步骤: ⑴对观测时间进行评比求得正常作业时间; ⑵对正常作业时间进行宽放,求得标准时间。
公式如下:
标准工时=正常作业时间×(1+宽放率) =观测时间×(1+评比系数)×(1+宽放率)
第四部分:MOD法应用 ㈡MOD法的时间单位及动作分类
1 MOD = 0.129 sec. 1 MOD = 0.00215 min. 1 MOD = 0.000036 hr. 1 sec. = 7.75 MOD 1 min. = 465 MOD 1 hr. = 27933 MOD 1MOD=0.129s 1MOD=0.1s 1MOD=0.143s 1MOD=0.12s 正常值,能量消耗最小动作 高效值,熟练工人的高水平动作时间值 包括疲劳恢复时间的10.7%在内的动作时间 快速值,比正常值快7%左右
标准工时之模特法(MOD)

1.6.標準工時寬裕率的三個組成部份;
2) 作業主體生理或心理寬裕2%: 基于作業主體生理或心理的要求,除了正規的休息 時間之外,在作業過程上洗手間,喝水,擦汗,放松身 體等動作均可按2%的比率推攤入ST)
1.6.標準工時寬裕率的三個組成部份;
3)作業主體疲勞寬裕2%:
根據人對勞動時間的適應和對勞動強度的承 受能力,作業主
思考
1. 以下哪些因素會導致生產效率下降(
);
A. 生產工具落後; B. 員工不努力; C. 欠品停拉; D. 不良品多.
E. 加班時間不夠;
2. 以下哪些因素不屬于正常ST的計算范畴(
);
A. 閱讀作業指導書. B: 到10米處去拿部品.
C: 送半成品去臨時倉. D: 作業中隨時更換破了手指套
3. 作業過程中動作的三不原則是:
2) 把使用的身体部位用21个记号来分类。 3) 时间单位以MOD表示。
*1 MOD = 0.129秒 = 0.00215分(经济速度时) 4) 记号和时间值是一致的。 5) 使用很容易使用的基本图。 6) 因为是数字式的记号,也可以用汉字来表示。 7) 时间分析时只需要分析用纸。 8) 使用程度高。 9) 易活用于作业改善活动。 10) 和最初时间值同样的数字表示。 11) 动作分析及ST的算出简单。
及日常管理.
1.5.標準工時組成的兩個部份;
ST = 基本作業時間*(1+寬裕率) 注:寬裕率一般企業均定為7%.
1.6.標準工時寬裕率的三個組成部份;
1) 工程(位)寬裕3%
包括治/工具的準備,設備點檢; 治工具損壞時交換,部品治/工具掉落拾起; 手套/指套配戴,交換; 工具清洁,資材補充<限50CM以內>; 作業指導書查閱<悟不出時的對照>; 非檢查工位不良部品發生時的延誤.
标准工时测量-----模特法
整理课件
4
2.动作分析使用的其他符号
(1)延时BD 表示另一只手进行动作时,这一只手 什么动作也没有做,即停止状态。BD不给予时间值。
(2)保持H 表示用手拿着或抓着物体一直不动的 状态。有时为了防止零件倒下,而用固定的工具也 为H。H也不给予时间值。
(3)有效时间UT 指人的动作之外的机械或其他固 有的加工时间。其有效时间要用计时仪表分别确定 其时间值。例如用电板扳手拧摞母、焊锡、铆接铆 钉、涂粘接剂等。
模特法(MOD法)
Modular Arrangement of Predetermined Time Standard
HANGSHENG: WENAO
整理课件
1
第一节 模特法的基本概念
一、模特法的原理
模特法的基本原理基于人机工程学的实验, 归纳如下:
① 所有人力操作时的动作,均包括一些基 本动作。通过大量的试验研究,模特法 把生产实际中操作的动作归纳为21种 。
其动作举例有:把开关拨到on(off)的位置;回 转小旋钮;抓住空气传动器的旋钮;用手指拧螺 母;用手指擦密封条。
用手指动作M1表示手指的一次动作。对于用手指 将开关拨到on(off)或用手指旋转螺母时,要观 察手指进行了几次动作,进行了几次,时间值则 为其几倍。
整理课件
10
(2)手的动作M2 用腕关节以前的部分进行一次 的动作,时间值为2MOD,动作距离为5cm(参)大臂尽量伸直的动作M5 在胳膊自然伸直的基 础上,再尽量伸直的动作。另外,将整个胳膊从自 己的身体正面向相反的侧面伸出的动作也用M5表示。 其时间值为5 MOD,移动距离一般为45 cm(参考 值)。
从劳动生理的角度看,连续做M5的动作是不可取的, 应尽量减少M5的动作。
标准工时MOD法

PPT文档演模板
标准工时MOD法
•2.动作分析使用的其他符号
•(1)延时BD 表示另一只手进行动作时,这一只 手什么动作也没有做,即停止状态。BD不给予时间 值。
•(2)保持H 表示用手拿着或抓着物体一直不动的 状态。有时为了防止零件倒下,而用固定的工具也 为H。H也不给予时间值。
•(3)有效时间UT 指人的动作之外的机械或其他 固有的加工时间。其有效时间要用计时仪表分别确 定其时间值。例如用电板扳手拧摞母、焊锡、铆接 铆钉、涂粘接剂等。
•在M3的移动动作范围内,其可能的作业区域称为正常的作 业范围。
•设计作业区要尽可能地设计得狭窄些。在设计生产设备的 操作部分时,尽量使操作动作用M3的移动动作来完成,如 图11-2所示。
PPT文档演模板
标准工时MOD法
•(4)大臂的动作M4 伴随肘的移动,小臂和大臂 做为一个整体,在自然状态下伸出的动作。其时 间值为4 MOD,移动距离一般为30cm(参考值)。
•当把手臂充分伸展时,伴有身体前倾的辅助动作, 从时间值上来看,仍是M4。
•其动作举例有:把手伸向放在桌子前方的零件; 把左手伸向放在桌子左端的工具;把手伸向放在 略高于操作者头部的工具。
PPT文档演模板
标准工时MOD法
•(5)大臂尽量伸直的动作M5 在胳膊自然伸直的 基础上,再尽量伸直的动作。另外,将整个胳膊从 自己的身体正面向相反的侧面伸出的动作也用M5表 示。其时间值为5 MOD,移动距离一般为45 cm(参 考值)。
•其动作举例有:转动调谐旋钮;将电阻插在印刷 电路板上;转动门轴;翻笔记本。
PPT文档演模板
标准工时MOD法
•(3)小臂的动作M3 将肘关节做为支点,肘以前的小臂 (包括手、手指)的动作。每动作一次定为M3,时间值为3 MOD,移动距离为15cm(参考值)。
标准工时的定义计算MOD法课件

VS
详细描述
某食品加工企业采用MOD法对生产流程 进行工时估算,实现了安全、健康、环保 的生产管理。通过将食品加工流程细分为 多个操作步骤,并利用MOD法对每个操 作步骤进行工时估算,企业能够更好地控 制生产过程,确保食品安全和健康。同时 ,MOD法的应用也促进了企业的环保管 理,降低了能源消耗和排放。
分配生产资源
根据产品种类、工艺要求 等因素,分配相应的生产 资源,包括设备、材料、 人员等。
分析生产流程
详细分析生产流程
对每个生产环节进行详细分析, 了解各环节的生产工艺、操作流
程、关键控制点等。
确定瓶颈环节
针对分析结果,找出生产流程中的 瓶颈环节,制定相应的改善措施。
优化生产流程
根据分析结果,对生产流程进行优 化,提高生产效率及产品质量。
。
标准工时是评估工作效率的重要 标准,它可以帮助企业了解生产 过程中的瓶颈和问题,提高生产
效率和质量。
标准工时是制定人工成本的重要 参考,它可以帮助企业合理制定 人工成本预算,提高企业的经济
效益。
02 标准工时计算
计算公式及参数设定
01
02
03
计算公式
标准工时 = 正常时间 + 宽放时间
正常时间
进行某项作业一般所需时 间
宽放时间
为补偿各种额外因素所需 要的时间,如疲劳、停工 等
工作研究与时间测量
工作研究
通过细致的观察和分析,确定各 项作业的必要时间和工作量
时间测量
用计时器和秒表等工具记录作业 时间,以此为基础计算标准工时
标准工时计算方法
方法一:秒表法 1. 准备秒表等计时工具
2. 记录每个阶段作业时间
标准工时的特点
标准工时的定义计算MOD法课件

标准工时的作用
01
帮助企业合理安排生产计划,预测生产能力,确保 生产进度。
02
用于评估和比较不同工作岗位的工作效率,优化人 力资源配置。
03
为制定生产标准、作业指导书和工艺流程提供依据 。
标准工时的制定流程
收集数据
收集有关作业时间、操作频率 、停滞时间等数据。
制定标准
根据分析结果,制定标准工时 ,并考虑作业的难易程度、工 作条件等因素。
案例三:某零售企业的标准工时计算
总结词
需考虑门店地理位置、客流量和员工技能水平
详细描述
在计算零售企业的标准工时时,需将门店地理位置、客 流量和员工技能水平等因素纳入考虑范畴。通过对这些 因素的综合分析,制定出符合实际运营情况的标准工时 。此外,还需定期对标准工时进行评估和调整,以确保 其合理性和有效性。
VS
这种方法通常由时间研究专家进行, 他们会实地观察员工执行任务,并使 用计时器记录完成任务所需的时间。 这种方法得出的工时数据比较准确, 但需要投入大量时间和人力。
预定动作时间研究法
定义:预定动作时间研究法是一种基于动作分析,对完成某项任务所需的时间进 行预测的方法。
这种方法首先对任务进行动作分解,然后根据每个动作的预估时间,计算出完成 整个任务所需的总时间。这种方法可以在没有实际观测的情况下得出工时数据, 但需要具备一定的动作分析基础。
确定作业内容
明确作业范围、工作内容和操 作步骤。
分析数据
对收集的数据进行分析,确定 正常作业速率和异常因素。
验证与调整
在实际生产中验证标准工时的 适用性,并根据实际情况进行 调整和完善。
02 标准工时的计算方法
直接时间研究法
定义:直接时间研究法是一种通过观 察和计时,对完成某项任务所需的时 间进行直接测量的方法法的优点包括
MOD法测定标准工时
預置時間標准法( 預置時間標准法(PTS) ----MOD法 ----MOD法 3 、模特法的動作分析: A : 基本動作---------上肢動作
1> 、移動動作 (1)手指的動作M1 (2)手的動作M2 (3)小臂的動作M3 (4)大臂的動作M4 (5)大臂盡量伸直的動作M5 (6)反射動作
10
模特 數 11 4 12 8 11 4 6
表達式
M4G1M4P2 BD M3G1M3
M3P5UT=1.25
M3G0M3P5 UT=1.25 BD M2G1M3P0
抓電批對准上 螺絲
等待 取成品于皮拉上
56*0.129+2.5=9.72s
總有效時間
1.25*2= 正常作業時間 2.5s
預置時間標准法( 預置時間標准法(PTS) ----MOD法 ----MOD法
預置時間標准法( 預置時間標准法(PTS) ----MOD法 ----MOD法 1 、表MODAPTS与其它方法比較 表MODAPTS与其它方法比較
項目
基本動作及附 加因素种類 不同的時間 值數字個數
5
MOD
MTM(MethodsMTM Time Measurement)
WF(Work WF Factor)
預置時間標准法( 預置時間標准法(PTS) ----MOD法 ----MOD法
2 >、終結動作: (1)触及動作G0 (2)抓的動作G1 (3)抓的動作G3(需要注意力) (4)放置、放下的動作P0 (5)放置動作P2(需要注意力) (6)放置動作P5(需要注意力) 3 > 、移動動作与終結動作的結合: 伸手拿螺絲釘的動作為:M3G1
MOD法 預置時間標准法(PTS) -MOD法 時間標准法(
MOD法分析标准时间
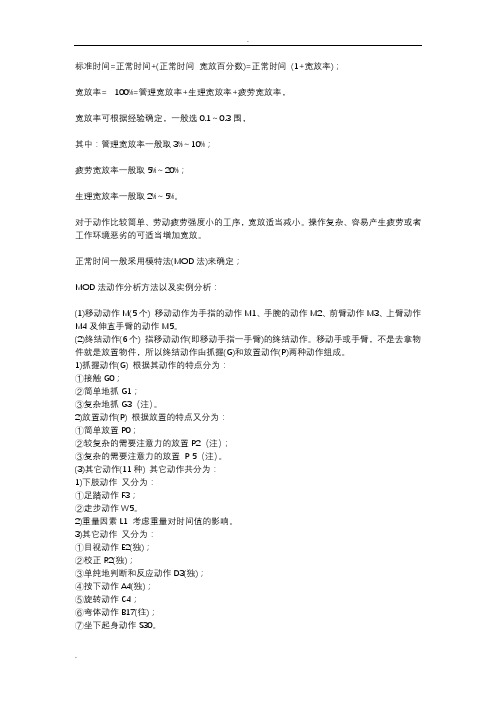
标准时间=正常时间+(正常时间×宽放百分数)=正常时间×(1+宽放率);宽放率= ×100%=管理宽放率+生理宽放率+疲劳宽放率,宽放率可根据经验确定,一般选0.1~0.3围,其中:管理宽放率一般取3%~10%;疲劳宽放率一般取5%~20%;生理宽放率一般取2%~5%。
对于动作比较简单、劳动疲劳强度小的工序,宽放适当减小。
操作复杂、容易产生疲劳或者工作环境恶劣的可适当增加宽放。
正常时间一般采用模特法(MOD法)来确定;MOD法动作分析方法以及实例分析:(1)移动动作M(5个) 移动动作为手指的动作M1、手腕的动作M2、前臂动作M3、上臂动作M4及伸直手臂的动作M5。
(2)终结动作(6个) 指移动动作(即移动手指一手臂)的终结动作。
移动手或手臂,不是去拿物件就是放置物件,所以终结动作由抓握(G)和放置动作(P)两种动作组成。
1)抓握动作(G) 根据其动作的特点分为:①接触G0;②简单地抓G1;③复杂地抓G3(注)。
2)放置动作(P) 根据放置的特点又分为:①简单放置P0;②较复杂的需要注意力的放置P2(注);③复杂的需要注意力的放置P 5(注)。
(3)其它动作(11种) 其它动作共分为:1)下肢动作又分为:①足踏动作F3;②走步动作W5。
2)重量因素L1 考虑重量对时间值的影响。
3)其它动作又分为:①目视动作E2(独);②校正R2(独);③单纯地判断和反应动作D3(独);④按下动作A4(独);⑤旋转动作C4;⑥弯体动作B17(往);⑦坐下起身动作S30。
4.模特法的动作分析(1)基本动作——上肢动作1)移动动作(M) 移动动作包括5种,分别以手指、手和手臂进行作业来区分。
①手指动作M1 表示用手指的第三个关节前的部分进行的动作,每动作一次时间值为1MOD,相当于手指移动了2.5cm的距离。
②手的动作M2 用腕关节以前的部分进行的动作,当然也包括了手指的动作,每进行一次为2MOD,相当于动作距离为5cm左右。
标准工时MOD法ppt课件

作业时间的确定
P3
善
知
识
培 如果能够给出要素动作相对应的基准时间值,
训 系
那么,要确定一种作业的时间,则可按下列程
列 教
序进行:
材 应确定进行本作业的固定方法;
要将一方法分解成基本要素动作;
应把预先确定的时间标准应用到各要素动作上,
联 想
再求出时间值;
移
动 制
1.
把这些时间值进行汇总。
造
部
工
程
小臂的动作 M3
P17
善
知
识
培
将肘关节做为支点,肘以前的小臂(包括手、
训 系
手指)的动作。每动作一次定为M3,时间值
列 教
是3MOD,移动距离为15cm。
材
由于手和小臂动作的方向关系,肘关节多少
要前后移动。肘关节的前后移动看作是主动
作M3的辅助动作。
联 想
M3的移动动作范围内,将可能的作业区域叫
(M1/2,M1,M2,M3) G0 接触后抓
终结动作
边看边抓 的动作
联 想 移 动 制
现
场
的
动
腿的动作
作
造
部
工
程
结合动作
处
放的动作
IE 组
G1 抓在手里 G3 难抓的动作 P0 容易放的动作 P2 边看放1次 P5 边看放2次 F3 踩Pedal
W5 步行
L1 重量要素
E2 眼
R2 改抓 D3 判断 A4 压力(按) C4 回转 B17 弯曲 起来
处
IE
组
IE 改
为深入学习习近平新时代中国特色社 会主义 思想和 党的十 九大精 神,贯彻 全国教 育大会 精神,充 分发挥 中小学 图书室 育人功 能
标准工时的定义计算_MOD法详解
七.总结
标准工时是工厂管理中最公正客观的计量化基准.如能善用,对管理工作将 有相当精确有效的帮助.相反地,如果标准工时不准确,将使得计划管制与 分析工作陷入困扰争执.但既使标准工时不准确.我们也不能持逃避的心态 故意不去用它,而是要深刻认识它,并加以修订使它达到准确至少是可用的 水平.生产现场有时由于时,空,人,物的变化,难免与原标准有出入.为了及时 修订标准,我们必须建立一套回馈与差异分析的机制,以统计手段找出实际 与标准差异的状况.分析影响生产效率的原因,并加以改善. 只有制订出完 整的标准工时,才可以反映出当天产线的实际生产状况.因为IE所订的标准 工时只有客观正确的反映出正常的作业时间.它不包括任何生产异常.如果 达不到就说明产线管理不当或出现生产异常.如果不按标准产线此类问题 就会一直存在.也没人去注意与改善.
2. 基础IE标准人均产能计算的方法:
标准人均产能=工作时间/全部工位加总时间
按新的方法算能的好处:
可以迫使IE到生产现场参与改善.
可以迫使生产线想方设法达到标准产能.
从源头上避免生产线虚报加班费 但是,标准产能高于实际产能应该有个合理的范围.不超过10%,是合理 的.
标准工时的计算与分析
一.标准工时的定义 二.标准工时的计算公式 三.标准工时观测的要求 四.标准人均产能的计算方法 五.标准工时之应用 六.MOD法简介 七.总结
Prepared by:WANG 2007-08-01
2018/11/22
一. 标准工时的定义.
由合格且受过良好训练的作业员,在一定标准条件下,以一定的 作业方法,以正常的速度,完成某项作业所需的时间. 标准工时五要素.
不良品处理,特殊的工作环境等 2%
可避免 的宽放
管理宽放
MOD法分析标准时间

标准时间= 正常时间+( 正常时间×宽放百分数)= 正常时间×(1+ 宽放率);宽放率= ×100%= 管理宽放率+生理宽放率+ 疲劳宽放率,宽放率可根据经验确定,一般选0.1~0.3 范围内,其中:管理宽放率一般取3%~10%;疲劳宽放率一般取5%~20%;生理宽放率一般取2%~5%。
对于动作比较简单、劳动疲劳强度小的工序,宽放适当减小。
操作复杂、容易产生疲劳或者工作环境恶劣的可适当增加宽放。
正常时间一般采用模特法(MOD 法)来确定;MOD 法动作分析方法以及实例分析:(1) 移动动作M(5 个) 移动动作为手指的动作M1、手腕的动作M2、前臂动作M3、上臂动作M4 及伸直手臂的动作M5。
(2) 终结动作(6 个) 指移动动作(即移动手指一手臂)的终结动作。
移动手或手臂,不是去拿物件就是放置物件,所以终结动作由抓握(G)和放置动作(P)两种动作组成。
1) 抓握动作(G) 根据其动作的特点分为:①接触G0;②简单地抓G1 ;③复杂地抓G3 (注)。
2) 放置动作(P) 根据放置的特点又分为:①简单放置P0;②较复杂的需要注意力的放置P2(注);③复杂的需要注意力的放置P 5(注)。
(3)其它动作(11 种) 其它动作共分为:1) 下肢动作又分为:①足踏动作F3 ;②走步动作W5 。
2) 重量因素L1 考虑重量对时间值的影响。
3) 其它动作又分为:①目视动作E2( 独);②校正R2(独);③单纯地判断和反应动作D3( 独);④按下动作A4( 独);⑤旋转动作C4;⑥弯体动作B17(往);⑦坐下起身动作S30。
4.模特法的动作分析(1) 基本动作——上肢动作1) 移动动作(M) 移动动作包括 5 种,分别以手指、手和手臂进行作业来区分。
①手指动作M1 表示用手指的第三个关节前的部分进行的动作,每动作一次时间值为1MOD ,相当于手指移动了 2.5cm 的距离。
②手的动作M2 用腕关节以前的部分进行的动作,当然也包括了手指的动作,每进行一次为2MOD ,相当于动作距离为5cm 左右。
标准工时——MOD法ppt课件
时间值,从而对操作进行合理的改进;
➢ 可以不用秒表,在工作前就决定标准时间,并
联 想
制定操作规程;
移
动 制
➢ 当作业方法变更时,必须修订作业的标准时间,
造 但所依据的预定动作时间标准不变;
部
工 程
➢ 用PTS法平整流水线是最佳的方法。
处
IE
组
IE 改
模特法MODAPTS
P Modular Arrangement of Predetermined Time
动 制
8) 使用程度高。
造 9) 易活用于作业改善活动。
部 工
10)和最初时间值同样的数字表示。
程 处
11) 动作分析及ST的算出简单。
IE
组
IE 改
MODAPTS基础
P12
善
知
识
培
1 MOD = .129 sec.
训 系
1 MOD = .00215 min.
列
1 MOD = .000036 hr.
S30 坐 起来
IE 改
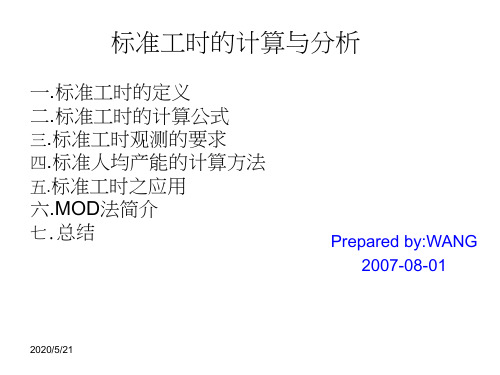
MODAPTS基本图
P14
善
知
识 培
移 动 动
训作
系
5cm 2.5cm
M1
M2
15cm M3
30cm M4
45cm M5
1 MOD = 0.129 Sec = 0.00215分
1 Sec = 7.75 MOD 1 min = 465 MOD
列
教
G0
G1
材终
需要注 意力的
G 3 (注意)
结
动作
动
作 联
想
移
动
制 造
mod法标准作业时间计算.xls

b.需要注意力的放置动作P2 放置物体时,需要用眼睛看,以决定物件的大致位置,时间值为2MOD。
c.需要有注意力的复杂的放置的动作P5 将物体正确地放在所规定的位置,或进行配合的动作。是比P2更复杂的动作,从始至 终需用眼看其精确的位置,时间值为5MOD。
基本动作注意点: "11种基本动作中, M1、M2、M3、M4、M5、G0、G1、P0是不需要注意力的动作,而G3、 P2、P5是需要注意力的。 "移动动作和终结动作总是成对出现的。例如伸手取螺丝,其时间值记为M3G1=4MOD。又如伸手去拿放在工作台上的尖嘴钳的动 作,则表示为:M3G1=4MOD。
a.触摸动作G0 用手、手指去接触目的物的动作,它没有去抓取目的物的意图,只是触及而已,所以为0MOD。
b.简单地抓Gl 在自然放松的状态下用手或手指抓取物件的动作,在被抓物件的附近没有障阻物,是比较简单地抓,时间值为 1MOD c.复杂的抓取动作G3 需要注意力的动作,是G1所不能实现的。在抓取目的物时有迟疑现象,或是目的物周围有障碍物;或是 目的物比较小,不容易一抓就得,或是目的物易变形、易碎,时间值为3MOD。
桌子上放着零件箱, A箱装螺钉, B箱装垫圈。两手同时伸出(M3),左手抓螺钉(G3),右手抓垫圈(G3),然后同时拿到身前安 装。
①同时动作的条件两手不是在任何情况下都能同时进行动作的,以下两种情况下可以同时动作。
a、当两只手的终结动作都是不需要注意力的时候。 b.当一只手的终结动作是需要注意力的,而另一只手的终结动作是不需注意力的时候。 对于两只手都需要注意力的动作,不可能同时进行。因为此时两只手的终结动作都需要注意力。
如果在B17中遇到搬运重量的动作,则必须加上重量因素。
B17中是单膝触地,不是双膝,因为如果是双膝触地,则不能一站即起复原位,必须按实际情况测定。 4)站起来再坐下的动作S30 坐在工作椅上站起来,再坐下的往复动作,一个周期为 30MOD。这个动作包括了站起来向后推椅子及坐下时拉椅子的动作。
标准工时之MOD法
标准工时之MOD法标准时间=正常时间+(正常时间×宽放百分数)=正常时间×(1+宽放率);宽放率= ×100%=管理宽放率+生理宽放率+疲劳宽放率,宽放率可根据经验确定,一般选0.1~0.3范围内,其中:管理宽放率一般取3%~10%;疲劳宽放率一般取5%~20%;生理宽放率一般取2%~5%。
对于动作比较简单、劳动疲劳强度小的工序,宽放适当减小。
操作复杂、容易产生疲劳或者工作环境恶劣的可适当增加宽放。
正常时间一般采用模特法(MOD法)来确定;MOD法动作分析方法以及实例分析:(1)移动动作M(5个) 移动动作为手指的动作M1、手腕的动作M2、前臂动作M3、上臂动作M4及伸直手臂的动作M5。
(2)终结动作(6个) 指移动动作(即移动手指一手臂)的终结动作。
移动手或手臂,不是去拿物件就是放置物件,所以终结动作由抓握(G)和放置动作(P)两种动作组成。
1)抓握动作(G) 根据其动作的特点分为:①接触G0;②简单地抓G1;③复杂地抓G3(注)。
2)放置动作(P) 根据放置的特点又分为:①简单放置P0;②较复杂的需要注意力的放置P2(注);③复杂的需要注意力的放置P 5(注)。
(3)其它动作(11种) 其它动作共分为:1)下肢动作又分为:①足踏动作F3;②走步动作W5。
2)重量因素L1 考虑重量对时间值的影响。
3)其它动作又分为:①目视动作E2(独);②校正R2(独);③单纯地判断和反应动作D3(独);④按下动作A4(独);⑤旋转动作C4;⑥弯体动作B17(往);⑦坐下起身动作S30。
4.模特法的动作分析(1)基本动作——上肢动作1)移动动作(M) 移动动作包括5种,分别以手指、手和手臂进行作业来区分。
①手指动作M1 表示用手指的第三个关节前的部分进行的动作,每动作一次时间值为1MO D,相当于手指移动了2.5cm的距离。
②手的动作M2 用腕关节以前的部分进行的动作,当然也包括了手指的动作,每进行一次为2MOD,相当于动作距离为5cm左右。
DIP(插件)标准工时-MOD
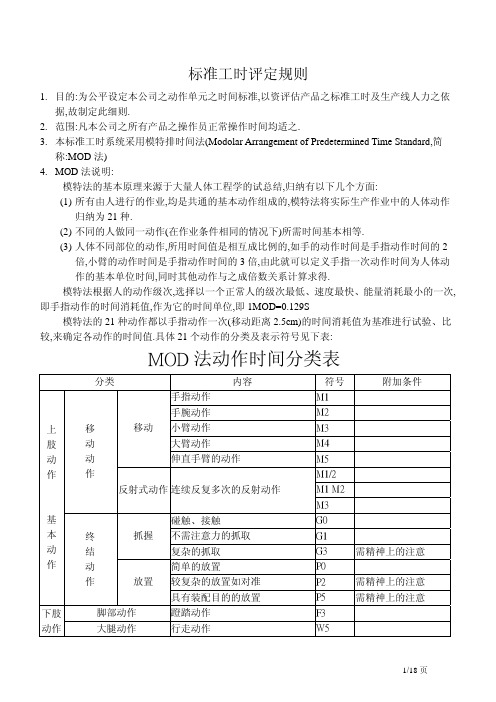
标准工时评定规则1.目的:为公平设定本公司之动作单元之时间标准,以资评估产品之标准工时及生产线人力之依据,故制定此细则.2.范围:凡本公司之所有产品之操作员正常操作时间均适之.3.本标准工时系统采用模特排时间法(Modolar Arrangement of Predetermined Time Standard,简称:MOD法)4.MOD法说明:模特法的基本原理来源于大量人体工程学的试总结,归纳有以下几个方面:(1)所有由人进行的作业,均是共通的基本动作组成的,模特法将实际生产作业中的人体动作归纳为21种.(2)不同的人做同一动作(在作业条件相同的情况下)所需时间基本相等.(3)人体不同部位的动作,所用时间值是相互成比例的,如手的动作时间是手指动作时间的2倍,小臂的动作时间是手指动作时间的3倍,由此就可以定义手指一次动作时间为人体动作的基本单位时间,同时其他动作与之成倍数关系计算求得.模特法根据人的动作级次,选择以一个正常人的级次最低、速度最快、能量消耗最小的一次,即手指动作的时间消耗值,作为它的时间单位,即1MOD=0.129S模特法的21种动作都以手指动作一次(移动距离2.5cm)的时间消耗值为基准进行试验、比较,来确定各动作的时间值.具体21个动作的分类及表示符号见下表:MOD法动作时间分类表分类内容符号附加条件上肢动作基本动作移动动作移动手指动作M1手腕动作M2小臂动作M3大臂动作M4伸直手臂的动作M5反射式动作连续反复多次的反射动作M1/2M1 M2M3终结动作抓握碰触、接触G0不需注意力的抓取G1复杂的抓取G3 需精神上的注意放置简单的放置P0较复杂的放置如对准P2 需精神上的注意具有装配目的的放置P5 需精神上的注意下肢动作脚部动作蹬踏动作F3 大腿动作行走动作W5其它动作独立进行的动作(此动作进行时其他动作停止)目视观察E2校正R2判断与反应D3按下A4可同时进行的肢体动作旋转动作C4弯腰弯体---站起B17 往复进行坐下---起身S30 往复进行附加因素重量因素(负重动作) L1非动作时间:NO 名称符号内容例1 延时BD 表示一只手进行动作,另一只手处于停止状态,不给予时间右手M左手BD2 保持H 表示用手拿着或抓着物体一直不动的状态,主要指扶持与固定的动作,不给时间左手H右手P23有效时间UT指人的动作以外,机械或其他工艺要求发生的,非动作产生的因有附加时间,需要准确测时.如机械的工作时间、焊锡、铆接、测试、涂布等插件焊锡时的执锡时间UT或仪表测试时间由上表知,MOD法把人的动作分成上肢、下肢、其他等动作,分别由符号M、G、P、F、W……代表,符号后仅赋予数字1、2、3……代表模特时间值,如M1代表1MOD=0.129SEC,M2即代表2MOD、以此类推.5.本公司MOD法制定标准工时基准如下:(1)以MOD分析之正常时间(即100%效率水平).(2)本细则规定之标准作业距离为20CM.(3)私事宽放:因本厂采取中休制度,故宽放率为0%.(4)疲劳宽放:因本厂作业强度属轻、中度作业,故取宽放标准为15%.(5)作业宽放:如,a.台及场地的简单清洁与准备,包括转换产品品种时的时间消耗.b.来料及零件不良造成的停顿.(SMT零件脚宽不准)c.现场监督者与检查员临时抽检及口头指示造成的偶发停顿.d.上下工位的传递中偶发问题等.以上各宽放平均取:3%.(6)特殊宽放:如管理宽放、小批量的宽放、奖励宽放、机械干扰的宽放、不同作业人群的宽放等,平均取:2%.和计以上可知本公司取平均宽放率为20%.以上为一般正常状况之基准,如产品设计或工作环境等有异常时,得酌情修正.6.标准工时如下各页所示.6.1.1 DIP H/I段插件工时如下:插件時間研究一覽表6.1.2 DIP H/I段切板、上插销及目检工时:1)切板后放入输送带共: ∑ac/2=4.7SEC/EANo 动作描述分析式 MOD数标准时间1 a.取基板,并检查SMT标记左手:HM4G1M3右手:M4G1M4M3检查判断:E2D312 2.6SEC2 b.切板(每块) 左手:M4P5+UT=2.5SECM4右手:M4P5+UT=2.5SECM4**** 2.5 SEC3 c.放入输送带(2块) 左手:M4P0G1M4P0M4G1M4右手:M2P0左手:M4P0M4右手:H28 4.3SEC2)压PHONE JACK后上插销(每块) 共: ∑ad/2=6.3SEC/EANo 动作描述分析式 MOD数标准时间1 a.取PHONE JACK后再取基板右手:M4G1HM4左手:M4G1M4P218 2.8SEC插件時間研究一覽表2b.压PHONE JACK(2颗)右手:P5M3左手:C4P2右手:M4G1M4P5M3 31 4.8SEC 3 c.取插销再上插销(2块) 左手:M2H M4G3M4P2G1H 右手:G1HM2G1M2P224 3.7 SEC 4 d.放入输送带 左手:HP0右手:G1R2M3P2 8 1.2SEC6.2 DIP T/U 段一般动作标准: 1)拆板后切板,放入输送带 共:∑ae/2 =6.4SEC/EANo 动作描述分析式 MOD 数标准时间1a.取下散热板治具(2片) 左手:M4G1M2G1M4P0右手:H12 1.9 SEC 2 b.拆断余板一端 右手:M4G1M4M2P2M3左手:HM2G1M3P0 22 3.4 SEC 3 c.拆断余板另一端 右手:M3C4M2P2M3 左手:HM2M1M3P0 20 3.1 SEC 4 d.切板(2连板)左手:M4P5+UT=2.5SECM4 右手:M4P5+UT=2.5SECM4 **** 2.5SEC 5 e.放入输送带(2块) 左手:M4P0G1M4P0M4G1M4右手:M2P0 左手:M4P0M4 右手:H 28 4.3SEC双手双手2)取插销后刮锡渣放入输送带 共: ∑aC=3.3+2.2N SEC/EANo动作描述分析式 MOD 数 标准时间1 a. 取插销及PCB 板 左手:M4G1M2G1M4P0右手:M4G1M4P212 1.9SEC 2b.刮锡渣=UT*N 颗UT=1.8SEC **** 2.2NSEC 3 c.放入输送带 左手:H右手:M2G1M4P2 9 1.4SEC2)取基板检查零件是否过长后剪过长零件脚共∑ad=5.4+3(L+N) +0.006NB+1.3N SEC(L:PCB 板长,W:PCB板宽,N:零件总颗数,B:零件过长比率) No 动作描述分析式 MOD 数标准时间1a.自输送带取基板,并翻转 左手:M4G1M4C4M3 右手:H 16 2.5SEC 2 b.检查零件脚是否过长时间=每目检一次所需时间(S1)*移动目光检视区域次数(n)+判断每颗零件脚是否过长时间(S2)*零件总数(N)*零件过长比率(B)UT=0.4(L+W)/7.5+0.006N SEC(因人目光一次可看75*75CM)之区域,故看完一片PC 板需看n 次, n=(PCB 宽/7.5)*(PCB 长/7.5)(Unit:CM)抽样求得S1=0.4SEC,S2=0.006SEC) ****=3(L+N)+0.006NBSECL:CMW:CM2 b.取气剪 左手:H右手:M4G1M4 9 1.4 SEC 3 c.剪零件脚(每颗) UT=1.3 SEC **** 1.3N SEC 4 d.放回输送带 左手:M4C4P2 右手:H 10 1.5SEC3)取基及支架放于治具上,再锁螺丝 自攻螺丝:共: ∑ad=4.5+0.022L(1+N)+1.5N SEC 机械螺丝:共:∑ad=4.5+0.027K(1+N)+1.5N SECNo 动作描述分析式 MOD 数标准时间1a.取基板及支架放于治具上 左手:M4G1M4P2 右手:M3G1M3P211 1.7SEC(自攻螺丝)(机械螺丝) (自攻螺丝)(机械螺丝) 2b.锁螺丝(第一颗) (L:自攻螺丝长度:mm)(K:机械螺丝长度:mm) 右手:M3G1M3P2M3P2+ 0.022*L左手:H右手:M3G1M3P2M3P2+ 0.027*K左手:H **** ****2.2+0.022*L (自攻螺丝) 2.2+0.027K (机械螺丝) SEC SEC3c.连续锁螺丝(每颗*N) (N:锁螺丝数量)(L:自攻螺丝长度:mm) (K:机械螺丝长度:mm)右手:(M3P2M3P2+0.022*L)*N左手:H 右手:(M3P2M3P2+0.027*K)*N左手:H ****(1.5+0.022*L)*N OR (1.5+0.027*K)*NSEC4 d.放入输送带 左手:M4P0 右手:H 4 0.6SEC3)输送带上取基板、正检 共a+b=1.4+0.14N SEC(N:零件总颗数)No动作描述分析式 MOD 数 标准时间1 a.自输送带取基板 左手:M4G1M4右手:H9 1.4 SEC 2 b.检查零件面(每颗) UT=0.14 SEC **** 0.14NSEC 补跷件后将基板放回输送带. 共: a i= 13.2+(6.47NB) SEC(N:零件总颗数,B:正检不良率) No动作描述分析式 MOD 数 标准时间1 a.按住跷件,反过PC 板 左手:M4G1M4A4C4右手:M3G1C4 17 2.6 SEC 2 b.取络铁左手:H右手: M4G1M49 1.4SEC 3c.清除焊孔=每点时间(S)*总焊锡点(N)*不良率(B)UT=2.3 SEC **** 2.3NBSEC4 d.压入跷起之脚(每颗) 左手:C4D3M2A4C4 右手:H17 2.6 SEC/EA 5e.左手取锡丝, 右手取络铁左手:M3G1M3P5 右手:M4G1M421 3.3SEC 6f.补焊=每点时间(S)*总焊锡点(N)*不良率(B)UT=2.47 SEC **** 2.47NBSEC7 g.放锡丝和络铁 左手:M3P0 右手:M4P29 1.4 SEC 8h.用静电刷清洁焊点(每点) 左手:M3G1M3*(2M2*N*B)右手:H**** 1.7NBSEC双手=拿静电刷时间(S)*总焊锡点(N)*不良率(B) 9 i.放回输送带上 左手:M3G1M4P0M4 右手:H 12 1.9SEC4)输送带上取基板、背检、补焊后将基板放回输送带. 共∑ag=8.5+(0.07N+4.17NB) SEC(N:零件总颗数,B:背检不良率)No 动作描述分析式 MOD 数 标准时间1a.自输送带取基板,翻转背面向上 左手:M4G1M4C4右手:HC4 13 2.0 SEC 2 b.检查焊锡面(每点) UT=0.07 SEC **** 0.07N SEC 3c.左手取锡丝, 右手取络铁左手:M3G1M3P5 右手:M4G1M421 3.3SEC 4d.补焊=每点时间(S)*不良点数(N) =每点时间(S)*总焊锡点(N)*不良率(B)UT=2.47 SEC **** 2.47NBSEC5 e.放锡丝和络铁 左手:M3P0 右手:M4P29 1.4SEC 6f.用静电刷清洁焊点(每点) =拿静电刷时间(S)*总焊锡点(N)*不良率(B)左手:M3G1M3*(2M2*N*B) 右手:H **** 1.7NBSEC 7 g.放回输送带上 左手:M3G1M4P0M4 右手:H 12 1.9SEC5)贴散热片 共:∑a c=10.9SEC/EANo动作描述分析式 MOD 数 标准时间1 a.撕背胶 左手:M4G1M4H右手:M2P2M2M4P0 19 2.9 SEC 2 b.贴片 右手:M4G1M4P0 左手:M2P516 2.5 SEC 3 c.压片 左手:M2H右手:M3M2+UT=3.8SECM4 **** 5.5SEC双手6)锁螺丝自攻螺丝:共:∑ac=3.2+0.022L(1+N)+1.4N SEC/EA 机械螺丝; 共:∑ac=3.2+0.027K(1+N)+1.4N SEC/EANo动作描述分析式 MOD 数 标准时间1 a.取螺丝及锁固物 左手:M3G3M3H右手:M4G1M4P211 1.7SEC 2b.锁螺丝(第一颗)(L:自攻螺丝长度:mm)(K:机械螺丝长度:mm)左手:H (自攻螺丝)右手:M3G1P2M2P2+0.022*L左手:H (机械螺丝)右手:M3G1P2M2P2+0.027*K****1.5+0.022L(自攻螺丝) 1.5+0027K (机械螺丝) SEC3 c.继续螺螺丝左手: H (自攻螺丝)右手:(M3P2M2P2+0.022*L)N 左手:H (机械螺丝)右手:(M3P2M2P2+0.027*K)N ****(1.4+0.022L)N(自攻螺丝) (1.4+0027K)N (机械螺丝)SEC。
标准工时——MOD法

在作业测定中,不需要对操作者的速度、努力 程度等进行评价,就能预先客观地确定作业地 标准时间; 可以详细记述操作方法,并得到各项基本动作 时间值,从而对操作进行合理的改进; 可以不用秒表,在工作前就决定标准时间,并 制定操作规程; 当作业方法变更时,必须修订作业的标准时间, 但所依据的预定动作时间标准不变; 用PTS法平整流水线是最佳的方法。
P22
联 想 移 动 制 造 部 工 程 处 列 教 材
G0
触及 G0
用手指或手去接触目的物的动作。这个动作 没有要抓住目的物的意图,只是触及而已。 它是瞬间发生的动作,所以没有动作时间。
–碰推键; –用手指接触垫圈; –碰放在桌上的橡皮; –推放在夹具上的印刷电路板; –用两手推卡片的左、右侧面;
联 想 移 动 制 造 部 工 程 处 IE 组
IE 改 善 知 识 培 训 系 列 教 材
MODAPTS的特点
易懂、易学、易记
P10
基本动作只有21种; 动作符号与时间值融为一体; 可以调整MOD值。
联 想 移 动 制 造 部 工 程 处 IE 组
PTS名称
基本动作及附加因素 不同的时间值数字个数
45cm
M5
IE 改 善 知 识 培 训 系 列 教 材
特殊移动动作(反射动作)
P21
反射动作是将工具和专用工具等牢牢地握在手里,进 行反复操作的动作。反射动作不是每一次都特别需要 注意力或保持特别意识的动作。
反射动作因其是反复操作,所以其时间值比通常 移动动作小:
联 想 移 动 制 造 部 工 程 处 IE 组
联 想 移 动 制 造 部 工 程 处 IE 组
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(4)大臂的动作M4 伴随肘的移动,小臂和大臂 做为一个整体,在自然状态下伸出的动作。其时 间值为4 MOD,移动距离一般为30cm(参考值)。 当把手臂充分伸展时,伴有身体前倾的辅助动作, 从时间值上来看,仍是M4。 其动作举例有:把手伸向放在桌子前方的零件; 把左手伸向放在桌子左端的工具;把手伸向放在 略高于操作者头部的工具。
3.移动动作与终结动作的结合 无论什么动作,移动动作之后,必定伴随着终结 动作。例如:伸手拿螺丝刀的动作,其移动动作 M3,终结动作为G1,其动作符号的标记为M2G1, 时间值为 3MOD + 1MOD = 4MOD 拧螺母的动作分析、符号标记及时间值如表11-8所 示。 使用螺丝刀的动作分析、符号标记及时间值见表 11-9。
No 标记符号 伸手抓零件 伸手抓零 M3G3M2G A M3G3 3 件B M4G3 左手动作 右手动作 次数 MOD 11
五、模特法分析记录表
第三节 模特法的动作分析
一、基本动作——上肢动作
1.移动动作 在模特法中,根据使用的身体部位的不同,时间值分为五 等:
(1)手指的动作M1 表示用手指的第三个关节 前的部分进行的动作,时间值为1 MOD,移动距 离为2.5cm(参考值)。 其动作举例有:把开关拨到on(off)的位置;回 转小旋钮;抓住空气传动器的旋钮;用手指拧螺 母;用手指擦密封条。 用手指动作M1表示手指的一次动作。对于用手指 将开关拨到on(off)或用手指旋转螺母时,要观 察手指进行了几次动作,进行了几次,时间值则 为其几倍。
(6)反射动作 反射动作是将工具和专用工具等牢牢 地握在手里,进行反复操作的动作。反射动作不是每 一次都特别需要注意力或保持特别意识的动作。反射 动作是上述各种移动动作的连续反复动作,没有终结 动作与其成对出现,所以又称为特殊移动动作。 反射动作因其是反复操作,所以其时间值比通常移动 动作小,有: 手指的往复动作M1,每一个单程动作时间为1/2MOD; 手的往复动作M2,每一个单程动作时间为1 MOD;
模特法的21种动作都以手指动一次(移动约 2.5cm)的时间消耗值为基准进行试验、比较, 来确定各动作的时间值。 三、模特法的动作分类及其代号 1.动作分类及代号 MOD法把动作分为21个,每个动作以代号、图解、 见图11)。其动作的体系分 符号、时间值表示(见图 见图 类如表11-4所示。
2.动作分析使用的其他符号 (1)延时BD 表示另一只手进行动作时,这一只手 什么动作也没有做,即停止状态。BD不给予时间值。 (2)保持H 表示用手拿着或抓着物体一直不动的 状态。有时为了防止零件倒下,而用固定的工具也 为H。H也不给予时间值。 (3)有效时间UT 指人的动作之外的机械或其他固 有的加工时间。其有效时间要用计时仪表分别确定 其时间值。例如用电板扳手拧摞母、焊锡、铆接铆 钉、涂粘接剂等。 在改善作业中,BD和H出现得越少越好。
4.同时动作 用不同的身体部位,同时进行一样或不一样的两 个以上的动作叫同时动作。一般以两手的同时动 作为佳(排除一个手闲着的情况)。这样,可以 提高工作效率。其动作举例有: 桌上放着橡皮和削尖的铅笔,两手同时伸出,用 左手抓橡皮(G1),用右手抓笔(G1),然后放 到自己身前。
桌上放着螺钉箱,另在高于头的地方吊着螺丝 刀,两手同时伸出,左手抓螺丝钉(G3),右手抓 螺丝刀(G1),拿到身前,螺丝钉槽与螺丝刀尖对 好。 桌上放着零件箱,A箱装有螺钉,B箱装着垫圈,两 手 同 时 伸 出 , 左 手 抓 螺 钉 ( G3), 右 手 抓 垫 圈 (G3),然后同时拿到身前安装。
(6)放置动作P5(需要注意力) 将物体正确地放在所规定 的位置或进行配合的动作,它是比P2更复杂的动作。P5需要 伴有2次以上的修正动作,自始至终需要用眼睛观察,动作 中产生犹豫,时间值为5MOD。 P5动作一般适合于需要将物体放置在准确的位置上,或需要 X — Y交点坐标的或配合紧密的或要多方面的人来配合的场 合。 其动作举例有:将螺丝刀的头放入螺钉头的沟槽中;将螺母 套在螺钉上略拧;把飞轮套在轴上;把旋钮装在电位器轴上; 把导线焊到印刷线路板上;把产品铭牌装在规定的位置;装 插头;把外储存器放到规定位置上。
(5)放置动作P2(需要注意力)往目的地放东 西的动作,并需要用眼睛盯着进行一次修正的动 作。其时间值为2MOD。 一般P2动作适合于能够大体上确定物体位置或指 定位置,虽有配合公差但配合不严的场合。 其动作举例有:将垫圈套在螺栓上;向轴上涂油; 把烙铁放在烙铁架上;将作业完了的零件放在传 送带的指定位置上;用笔尖触及写字的位置。 。
(3)小臂的动作M3 将肘关节做为支点,肘以前的小臂 (包括手、手指)的动作。每动作一次定为M3,时间值为3 MOD,移动距离为15cm(参考值)。 由于手和小臂动作的方向关系,肘关节多少要向后移动。肘 关节的前后移动看作是主动作M3的辅助动作,不另计时间 值。粗加工、组装部件等在操作机上作业时,移动零件的位 置和作业位置的动作,一般认为是M3。 在M3的移动动作范围内,其可能的作业区域称为正常的作 业范围。 设计作业区要尽可能地设计得狭窄些。在设计生产设备的操 作部分时,尽量使操作动作用M3的移动动作来完成,如图 11-2所示。
手臂的往复动作M3,每一个单程动作时间为2 MOD; 上臂的往复动作M4,每一个单程动作时间为3 MOD; M5的动作一般不发生反射动作,即使有也必须 进行改进。所以,反射动作的时间值最大为 3MOD。 其动作举例有:用棒敲盒子;用布给盒子涂油; 用锤子敲东西;用橡皮擦字;盖邮戳。用指甲梳 东西或用手指贴封条的动作,当其反复进行时, 可以看作是反射动作,指甲或手起到工具的作用。
模特法(MOD法)
Modular Arrangement of Predetermined Time Standard
HANGSHENG: WENAO
第一节 模特法的基本概念
一、模特法的原理 模特法的基本原理基于人机工程学的实验, 归纳如下: ① 所有人力操作时的动作,均包括一些基 本动作。通过大量的试验研究,模特法 把生产实际中操作的动作归纳为21种 。 ② 不同的人做同一动作(在条件相同时) 所需的时间值基本相等。
(2)手的动作M2 用腕关节以前的部分进行一次 的动作,时间值为2MOD,动作距离为5cm(参考 值)。 依靠手腕的动作不仅能做横向动作,也可做上下、 左右、斜向或圆弧状的动作。根据M2的动作方式, 伴随手的动作,小臂多少也要动作,但主动作是手 的动作,小臂的动作是辅助动作(这里的小臂动作 不另计时间值)。 其动作举例有:转动调谐旋钮;将电阻插在印刷特法的特点
1.易懂、易学、易记 (1)模特法将动作归纳为21种 。 (2)模特法把动作符号与时间值融为一体。 • 如G3表示复杂的抓取动作,而且也同时表示了3 MOD = 3×0.129 s = 0.387 s。 • 如果是移动小臂去抓放在零件箱中的一个小螺钉(抓 时要同时扒开周围的其他零件),在模特法中用M3G3 表示,其中M3表示小臂的移动,G3表示复杂的抓取, M3G3 时 间 值 是 6 MOD( 其 中 M3 为 3 MOD,G3 为 3 MOD)。因此,只要知道动作的符号,也就知道了时 间值,所以,“一看就会了”。
③ 使用身体不同部位动作时,其动作所用的时间值 互成比例(如模特法中,手的动作是手指动作的2倍, 小臂的动作是手指动作的3倍),因此可以根据手指 一次动作时间单位的量值,直接计算其他不同身体 部位动作的时间值。 二、模特法的时间单位 模特法根据人的动作级次(见动作经济原则第二 条),选择以一个正常人的级次最低、速度最快、 能量消耗最少的一次手指动作的时间消耗值,作为 它的时间单位,即 1 MOD=0.129 s
两手动作都需要注意力时,当两手同时向目的物场 所移动的终了瞬间,某只手开始做终结动作,另一 中手就要在目的物附近稍为等待到第一只手动作完 后,再稍微移动M2,才能完成其终结动作。例如, 在桌子上放置有零件箱A和B(前方),两手分虽抓 两个零件A和B。如果,左手先动作情况如表11-12所 示。如果右手先动作,情况如表11-13所示。 表11-12左手先动作
(4)放置、放下动作P0 这个动作是指拿着的 东西送到目的地后,直接放下的动作。放置的 场所没有特殊的规定,一般不需要注意看,没 有时间值,即时间值为0 MOD。 其动作举例有:将拿着的螺丝刀放到桌子的旁 边;将挪近的空气传动装置放回原位置;将传 送来的零件放在自己面前;将用完的辅助支架 放到传送带上;将要检查的零件抓起,堆放在 面前。
(5)大臂尽量伸直的动作M5 在胳膊自然伸直的基 础上,再尽量伸直的动作。另外,将整个胳膊从自 己的身体正面向相反的侧面伸出的动作也用M5表示。 其时间值为5 MOD,移动距离一般为45 cm(参考 值)。 从劳动生理的角度看,连续做M5的动作是不可取的, 应尽量减少M5的动作。 动作举例有:尽量伸直胳膊取高架上的东西;把手 尽量伸向桌子的侧面;坐在椅子上抓放在地上的物 体;从自己身体的正面交叉,向相反方向尽量伸手。
(2)在实际使用中,还可以根据企业的实际情况, 决定MOD的单位时间值的大小。如: 1 MOD = 0.129 s = 0.00215 min 消耗最小动作时间 1 MOD = 0.1 s 作时间值 1 MOD = 0.143 s 内的动和时间 1 MOD= 0.12 s 正常值,能量
高效值,熟练工人的高水平动 包括恢复疲劳时间的10.75%在 快速值,比正常值快7%左右
2.终结动作 终结动作是移动动作进行到最后时,要达到目的 的动作。如触及或抓住物体,把拿着的物体移到 目的地,放入、装置、配合等动作。目的不同, 其难易程度不同,因而决定了不同的动作种类。 终结动作的种类有:触及、抓,用G来表示;放置、 配合,用P来表示。
(1)触及动作G0 用手指或手去接触目的物的动作。这个 动作没有要抓住目的的物的意图只是触及而已。它是瞬间 发生的动作,所以没有动作时间,因此时间值为0 MOD。 其动作举便有:碰推键;用手指接触垫圈;碰放在桌子上 的橡皮;推放在夹具上的印刷电路板;用两手推卡片的左、 右侧面。 (2)抓的动作G1 用手指、手简单地抓的动作。用手或手 指抓一次物体的动作,非常自然,而没有一点踌躇现象, 在被抓物体的附近也没有障碍物。时间值为1 MOD。 其动作举例有:抓单独放置的一个零件;抓螺丝刀;抓排 成一行的小型变压器;抓桌子上的圆珠笔。