智能机器人专用入力信号P3-16
安川机器人 命令介绍-内部版
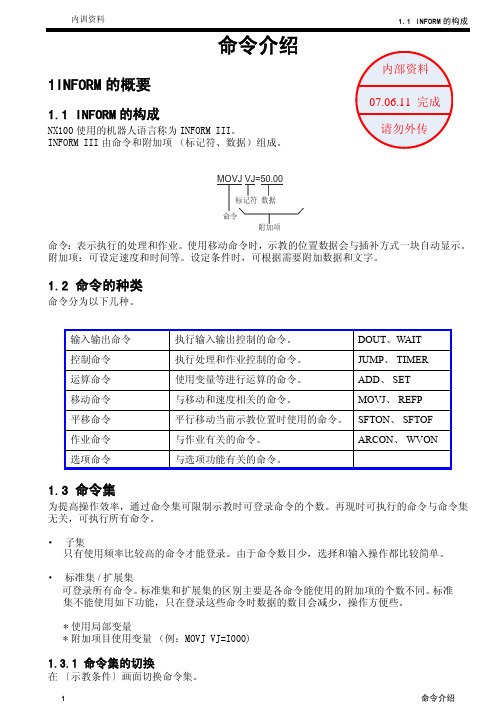
1.1 INFORM 的构成内训资料命令介绍1INFORM 的概要1.1 INFORM 的构成NX100使用的机器人语言称为INFORM III。
INFORM III 由命令和附加项(标记符、数据)组成。
命令:表示执行的处理和作业。
使用移动命令时,示教的位置数据会与插补方式一块自动显示。
附加项:可设定速度和时间等。
设定条件时,可根据需要附加数据和文字。
1.2 命令的种类命令分为以下几种。
1.3 命令集为提高操作效率,通过命令集可限制示教时可登录命令的个数。
再现时可执行的命令与命令集无关,可执行所有命令。
·子集只有使用频率比较高的命令才能登录。
由于命令数目少,选择和输入操作都比较简单。
·标准集/扩展集 可登录所有命令。
标准集和扩展集的区别主要是各命令能使用的附加项的个数不同。
标准 集不能使用如下功能,只在登录这些命令时数据的数目会减少,操作方便些。
*使用局部变量*附加项目使用变量(例:MOVJ VJ=I000)1.3.1 命令集的切换在〔示教条件〕画面切换命令集。
输入输出命令执行输入输出控制的命令。
DOUT 、 WAIT控制命令执行处理和作业控制的命令。
JUMP 、TIMER 运算命令使用变量等进行运算的命令。
ADD 、SET 移动命令与移动和速度相关的命令。
MOVJ 、REFP 平移命令平行移动当前示教位置时使用的命令。
SFTON 、SFTOF 作业命令与作业有关的命令。
ARCON 、WVON选项命令与选项功能有关的命令。
1.4 命令中能使用的变量 内训资料1.4 命令中能使用的变量设定为标准集和扩展集时,变量可以作为附加项的数据使用。
扩展集还可使用局部变量。
但是附加项变量的单位和数值的单位是不一样的。
2 命令的登录2.1 命令的登录在程序内容画面按〔命令一览〕键进行命令的登录。
2.2 命令的学习功能命令的学习功能就是指在登录命令时,缓冲行会显示与上次登录此命令时同样的附加项,这样可使登录更简单方便。
单片机自动清洁机器人设计(电路图+原理图+流程图+源程序)课程设计
单片机自动清洁机器人设计(电路图+原理图+流程图+源程序)-课程设计单片机自动清洁机器人设计最近在电视看到一款能够遥控移动的吸尘器,圆形的和遥控汽车差不多,我感觉到如果再不把自己的想法写出来,自己的创意会被很多人实现,我几年前就想设计一款能够打扫卫生的机器人,直到看到电视里的那个东西,我意识到,我要自己做一个出来。
移动机构是清洁机器人的主体,决定了清洁机器人的运动空间,一般采用轮式结构。
传感器系统一般采用超声波传感器、红外光电传感器、接触传感器等构成多传感器系统。
随着近年来控制技术、传感技术以及移动机器人技术等技术的迅速发展,智能清洁机器人控制系统的研究和开发已具备了坚实的基础和良好的发展前景。
吸尘系统在原理上与传统立式吸尘器相同,主要是在结构设计上更多考虑结构尺寸、集成度以及一些辅助机构的合理布置和利用,以此来提高能源利用率和工作效率。
现在的智能清洁机器人通过软硬件的合理设计,使其能够自动避开障碍物,实现一般家居环境下的自主清洁工作。
它的主要功能有: 1 能够自动熟悉地形,了解房间布局,感知自己的方位,记录和分析环境卫生状况,容易脏的地方多打扫,干净的地方少打扫,节省能源。
2能够自动补充能量。
当检测到电源不足时,自动找到电源,并充电。
充电结束自动专为待机状态。
3当垃圾装满后自动打包,并将垃圾放到主人指定的地点。
4能够检测主人是否在家,只有当主人不在家时,才出来打扫卫生,主人在家时机器人休息。
保证不影响主人的正常生活。
可行性分析:1应用超声波测距和滚轮定位就可以测到自己的位置,给据吸入垃圾量的多少,就可以分析出,那干净那里脏.2应用简单的空中加油技术就可以把自动充电搞定。
检测电源能量多少,和是否充满就更简单了.3垃圾打包只用简单的打包技术就可以解决.4机器人上装上热释红外探测器就知道主人在不在了..5剩下的功能,好多玩具里都有,只要把吸尘器和遥控车结合起来就搞定了1 系统整体方案设计1.1 制作清洁机器人的任务与要求:任务: 清洁机器人在场地上任意运动并吸尘,当遇到障碍物时,可自主避开障碍物绕道继续运动(轨迹由团队设定)。
阿特拉斯枪样本
电动装配工具和系统
69
工具代码............................................................................. 70 产品安全............................................................................. 74 工业用电池螺丝刀............................................................... 75 电动螺丝刀 – Eliza, EBL..................................................... 84 电动螺丝刀 – 电动微扭螺丝刀MicroTorqueTM..................... 87 电动螺丝刀 – Tensor DL..................................................... 90 电动螺丝刀 – Tensor SL..................................................... 91 电动拧紧扳手 – Tensor DS................................................. 92 电动拧紧扳手 – Tensor S.................................................... 98 电动拧紧扳手 – Tensor ST............................................... 103 Tensor DS / DL控制器.......................................................111 Power Focus.................................................................... 112 Power Focus / ETX拧紧轴和电缆..................................... 130 Power MACS 4000 / QST拧紧轴和电缆........................... 133 Power MACS / QMX拧紧轴和电缆................................... 141 刀头和动力套筒................................................................ 149 扭力臂............................................................................... 156
T-01-C-O-A200自动机器人平台使用说明-指导手册.

2012年全国职业院校技能大赛高职组机器人赛项CRT—A200自动机器人平台说明目录第一章自动机器人平台概述 (3)1.1 自动机器人平台的总体构成 (3)1.2 自动机器人平台按键部分 (4)1.3 机器人平台的充电 (4)第二章自动机器人平台系统结构 (4)2.1自动机器人平台机械部分 (4)2.1.1 机器人平台机械部分组成 (4)2.1.2 机器人平台运动详解 (5)2.2 自动机器人平台控制系统 (5)2.2.1 概述 (5)2.2.2 主控制板 (5)2.2.3 巡线传感器 (10)2.2.4 传感器信号处理板 (10)2.2.5 电机驱动板 (13)2.3 机器人平台控制程序 (15)2.3.1 控制程序流程图 (15)2.3.2 软件函数说明 (18)第三章自动机器人平台的装配和调试 (19)3.1 机器人装配过程 (19)3.1.1 主动轮电机装配 (19)3.1.2 电机安装至铝合金架板 (19)3.1.3 从动轮及传感器安装 (20)3.1.4 电路板的安装 (20)3.2 机器人平台的调试 (22)第一章自动机器人平台概述自动机器人平台是专门为高职类机器人大赛提供的一个统一的机器人底盘,可以实现在比赛场地全场范围内的运动、定位;并提供了充足的I/O接口,参赛队可以根据大赛任务的要求,在此平台上进一步设计制作各种抓取、投放机构,利用机器人平台提供的主控制板和编程算法实现整体机器人的控制。
1.1 自动机器人平台的总体构成机器人平台的总体构成参见图1-1和图1-2所示,由包括主动车轮、从动车轮、铝合金框架、直流电机、电池、电路板以及安装在底部的16路传感器组成。
图1-1 自动机器人平台的总体构成图1-2 自动机器人平台的侧面图1.2 自动机器人平台按键部分自动机器人平台上共有三个按键,12V电源开关、24V电源开关以及启动按钮。
在开机时,注意先打开12V电源开关,再打开24V电源开关,最后按下启动按钮,机器人开始运行;关机时,先关闭24V电源开关,再关闭12V电源开关。
三菱电机工业机器人CR800-D系列控制器GOT扩展功能说明书
危险
接通了机器人控制器的电源时,请勿拆下 SSCNET III 电缆。请勿直视 SSCNET III 连接器及 SSCNET III 电缆前端发出的强光。强光入目有可能导致眼睛不 适。 (SSCNET III 的光源相当于 JIS C 6802、IEC 60825-1 规定的等级 1。)
危险
将 SSCNET III 电缆拆下后,如果未在 SSCNET III 连接器上安装护盖,有可能会 黏附垃圾或灰尘而导致特性劣化或误动作。
地)端子后,接地连接 (作为 2 点接地)另一侧。 7) 应将一次侧电源连接用电缆连接到漏电断路器的一次侧端子上。
修订记录
印刷日期
规格书编号
2017-09-30 2018-03-01 2018-12-25
BFP-A3584 BFP-A3584-A BFP-A3584-B
修订内容 · 第一版 · 修改安全注意事项 ( 追加 CR800-Q 控制器的说明 ) · 追加 ACIN 电缆连接的补充说明
三相用:NV30FAU-3P-10A-AC100-240V-30mA (端子盖板:TCS-05FA3)
一次侧电源连接用电缆
AWG #14 (2mm2)以上
用户自备。 端子紧固螺丝的紧固力矩:2 ~
3N·m
接地电缆
AWG #14 (2mm2)以上
用户自备。 端子紧固螺丝的紧固力矩:2 ~
3N·m
ACIN 电缆
注意
注意 注意 注意 注意 注意 警告 警告 注意 警告
注意 注意
应在规格范围内的环境下使用机器人。 在超出规格范围的环境下使用机器人时,有可能导致可靠性降低或发生故障。 (温度、湿度、周围环境、噪声环境等)
搬运机器人时应将机器人置于指定的搬运姿势后进行搬运。 以指定以外的姿势进行搬运时有可能因摔落而导致人身事故或故障。
机器人基本操作和维护手册
IRB2400/16涂胶机器人工作站基本操作和维护手册(上海富威塑胶涂胶项目)上海ABB工程有限公司2007年11月目录一.系统安全及环境保护……………………………………….….….3-4 二.机器人系统基本操作…………………………………………..….5-8 三.机器人本体和控制柜基本维护………………………………...…9-12第一章系统安全及环境保护机器人系统复杂而且危险性大,在调试期间里,或者任何别的操作过程都必须注意安全。
无论任何时间进入机器人周围的保护的空间都可能导致严重的伤害。
只有经过培训认证的人员才可以进入该区域。
请严格注意。
以下的安全守则必须遵守。
∙万一发生火灾,请使用二氧化炭灭火器。
∙急停开关(E-Stop)不允许被短接。
∙机器人处于自动模式时,不允许进入其运动所及的区域。
∙意外或不正常情况下,均可使用E-Stop键,停止运行。
在编程,测试及维修时必须注意既使在低速时,机器人仍然是非常有力的,其动量很大,必须将机器人置于手动模式。
∙气路系统中的压力可达0.6MP,任何相关检修都要断气源。
∙在不用移动机器人及运行程序时,须及时释放使能器(Enable Device)。
∙调试人员进入机器人工作区时,须随身携带示教器,以防他人无意误操作。
∙在得到停电通知时,要预先关断机器人的主电源及气源。
∙突然停电后,要赶在来电之前预先关闭机器人的主电源开关。
∙维修人员必须保管好机器人钥匙,严禁非授权人员在手动模式下进入机器人软件系统,随意翻阅或修改程序及参数。
现场服务产生的危险固体废弃物必须及时回收,保护环境:∙废工业电池∙废电路板∙废润滑油∙废油脂∙粘油回丝或抹布∙废油桶∙损坏的零件∙包装材料第二章机器人系统基本操作1系统功能简介机器人、热溶胶机均处于自动状态,机器人在原点位置,等待操作工人安装好工件后,按启动按钮,机器人开始工作,完成两个模具的涂胶工作,并返回原点位置,准备进入下一工作循环。
2 停止程序按下停止键即停止程序的运行。
S40系统PLC你说明书(V1.1)
是ON 时,计数不发生变化。其响应周期为100ms。所以输入条件的接通和断开持续时间应大 于100ms。本系统PLC共有16个计数器C01-C15,其有如下特征:
(a)计数值为一个十进制数可在1到9999范围内指定。 (b)即使输入条件关闭时计数器的计数值不会被清除,必须用RST 指令清除计数器计数 值。 (c) 可在梯形图中使用计数器的常开触点和常闭触点。 例:如下图所示 X5 输入阻抗信号有效后,C0 被复位,它对应的计数值被置“0”,其常 开触点断开(常闭触点接通)。X7 输入信号用来提供计数输入信号,当计数器的复位输入断 开,计数输入信号由断开变为接通(即计数脉冲的上升沿)时,计数器的当前值加 1。在 9 个输入计数脉冲后,C0 计数器有效(常数 K 为 9),其常开触点接通(常闭触点断开),Y0 输
14
Y13
通用输出口
15
Y14
通用输出口
16
Y15
通用输出口
-8-
Your needs ,We have
成都卡诺普自动化控制技术有限公司 CRP Automation Control Technology Co.ltd
17
COM-
接口电源公共负端 DC24V
18
COM+
接口电源公共正端
J1 轴接口的分布
输出继电器系统 PLC 向外部负载发送信号的窗口。输出继电器用来将系统 PLC 的输出信 号传送给输出点,再由后者驱动外部负载。输出点的每一个继电器仅有一对常开点,但是在 梯形图每一个输出继电器的常开触点和常闭触点都可使用(并可多次使用),如下图所示:
智能机器人竞赛论文
第三届“西门子传动杯”智能机器人设计竞赛摘要本系统由信号检测、信号控制部分构成。
本系统以设计题目的要求为目的,采用89S52单片机为控制核心,利用超声波传感器检测道路上的障碍,控制电动小汽车的自动避障,快慢速行驶,以及自动停车,并具有自动自动寻迹功能。
整个系统的电路结构简单,可靠性能高。
实验测试结果满足要求,本文着重介绍了该系统的硬件设计方法及测试结果分析。
采用的技术主要有:(1)通过编程来控制小车的速度;(2)传感器的有效应用;关键词:89C52单片机、电动小车、光电检测器、PWM调速目录1 设计任务 (3)1.1 要求 (3)2 方案比较与选择 (4)2.1电机控制模块 (5)2.2 直流调速模块 (5)2.3电机驱动模块 (6)2.4信号检测模块 (6)3 硬件设计 (8)3.1AT89S52单片机硬件结构 (9)3.2 最小应用系统设计 (10)4 软件设计 (10)4.1 主程序设计 (10)4.2 显示子程序设计 (12)4.3 避障子程序设计 (12)4.4 软件抗干扰技术 (12)4.4.1数字滤波技术 (12)4.4.2开关量的软件抗干扰技术 (12)4.4.3指令冗余技术 (13)4.4.4软件陷阱技术 (13)4.4.5程序区 (13)4.5 “看门狗”技术 (144)4.6 可编程逻辑器件 (15)5 测试数据、测试结果分析及结论 (16)6系统程序 (17)致谢 (21)参考文献 (21)1. 设计任务:设计并制作了一个智能电动车,其行驶路线满足所需的要求。
1.1 要求:如(图1)所示:(图1)机器人必须紧靠起点标志线,当机器人在起点标志线启动以后,机器人在行车道上行驶遇到有障碍物的时候机器人必须把障碍物移放至相应的仓库(即1号障碍物移放至1号仓库),在移放障碍物的过程中,机器人除了清理障碍物的机械臂之外其他部分都不能接触到障碍物(不能直接用机器人顶撞障碍物,必须要有清理障碍物的机械臂),清理完场上所有的障碍物,并且将机器人停在停车区算完成任务。
RFSM中文操作手册

邮编:518029
http://
4
传真:0755-25839319 E-mail:htd@
深圳市海拓达电子技术有限公司
A-B Status
绿色
RF 输出切换到 A 路
黄色
RF 输出切换到 B 路
A-AUTO-B(切换)
Auto
切换到自动模式
21.14
-27.61
28.81
-19.94
31.14
-17.61
38.81
-9.94
41.14
-7.61
48.81
-0.06
51.14
2.39
58.81
10.06
61.14
12.39
68.81
20.06
71.14
22.39
切换逻辑:
地址:深圳市福田区八卦众鑫科技大厦 1805 室 电话:0755-25839320
应用: RF 切换开关的典型应用是用来保护两路正向接收机或备份放大器。这样,
RFSM 能独立地保护一对或两对正向光接收机或放大器。一旦 RFSM 侦测一个信 号电平升高或降低超过设置的门限电平,它将从 A 路切换到 B 路或从 B 路切换 到 A 路。所有开关的状态调节可以通过前面板来控制。
RFSM 在图 1 和图 2 中被用户配置为两种不同的应用。A 客户可能选择使用 两端口无源分配模块来提供两个独立的信号给互为冗余的放大器 A 和 B。RFSM
每频道
dBmV dBm
0
-48.75
10 -38.75
20 -28.75
30 -18.75
40
-8.75
50
1.25
表 5 RF 输入电平计算 76 个频道(550MHz 系统) 130 个频道(870MHz 系统) dBmV 总电平 dBm 总电平 dBmV 总电平 dBm 总电平
西门子 S7-1200 功能安全手册 - 设备手册说明书
SIMATICS7S7-1200 功能安全手册设备手册Siemens AGDigital IndustriesⓅ 10/2022 本公司保留更改的权利 Copyright © Siemens AG 2022. 保留所有权利法律资讯警告提示系统为了您的人身安全以及避免财产损失,必须注意本手册中的提示。
人身安全的提示用一个警告三角表示,仅与财产损失有关的提示不带警告三角。
警告提示根据危险等级由高到低如下表示。
危险表示如果不采取相应的小心措施,将会导致死亡或者严重的人身伤害。
警告表示如果不采取相应的小心措施,可能导致死亡或者严重的人身伤害。
小心表示如果不采取相应的小心措施,可能导致轻微的人身伤害。
注意表示如果不采取相应的小心措施,可能导致财产损失。
当出现多个危险等级的情况下,每次总是使用最高等级的警告提示。
如果在某个警告提示中带有警告可能导致人身伤害的警告三角,则可能在该警告提示中另外还附带有可能导致财产损失的警告。
合格的专业人员本文件所属的产品/系统只允许由符合各项工作要求的合格人员进行操作。
其操作必须遵照各自附带的文件说明,特别是其中的安全及警告提示。
由于具备相关培训及经验,合格人员可以察觉本产品/系统的风险,并避免可能的危险。
按规定使用 Siemens 产品请注意下列说明:警告Siemens 产品只允许用于目录和相关技术文件中规定的使用情况。
如果要使用其他公司的产品和组件,必须得到 Siemens 推荐和允许。
正确的运输、储存、组装、装配、安装、调试、操作和维护是产品安全、正常运行的前提。
必须保证允许的环境条件。
必须注意相关文件中的提示。
商标所有带有标记符号 ® 的都是 Siemens AG 的注册商标。
本印刷品中的其他符号可能是一些其他商标。
若第三方出于自身目的使用这些商标,将侵害其所有者的权利。
责任免除我们已对印刷品中所述内容与硬件和软件的一致性作过检查。
然而不排除存在偏差的可能性,因此我们不保证印刷品中所述内容与硬件和软件完全一致。
FTL50中文说明书

电子插件 FEL52 ( 直流供电 (DC)、 PNP) . . . . . . . . . . 8 电源 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8 电气连接 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8 输出信号 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8 报警信号 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8 连接负载 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
PLC指令表
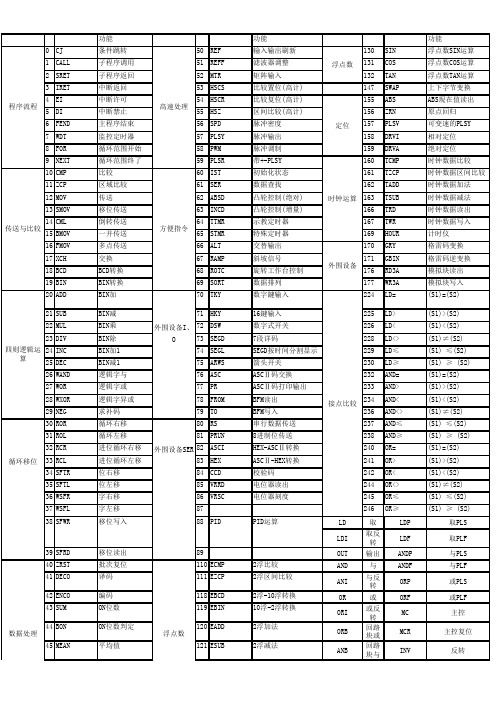
功能 输入输出刷新 滤波器调整 矩阵输入 比较置位(高计) 比较复位(高计) 区间比较(高计) 脉冲密度 脉冲输出 脉冲调制 带+-PLSY 初始化状态 数据查找 凸轮控制(绝对) 凸轮控制(增量) 示教定时器 特殊定时器 交替输出 斜坡信号 旋转工作台控制 数据排列 数字鍵输入 16鍵输入 数字式开关 7段详码 SEGD按时间分割显示 箭头开关 ASCⅡ码交换 ASCⅡ码打印输出 BFM读出 BFM写入 串行数据传送 8进制位传送 HEX-ASCⅡ转换 ASCⅡ-HEX转换 校验码 电位器读出 电位器刻度 PID运算 接点比较 外围设备 定位 浮点数 130 131 132 147 155 156 157 158 159 160 161 162 时钟运算 163 166 167 169 170 171 176 177 224 225 226 228 229 230 232 233 234 236 237 238 240 241 242 244 245 246 LD LDI 取 取反 转 输出 与 与反 转 或 或反 转 回路 块或 回路 块与 SIN COS TAN SWAP ABS ZRN PLSV DRVI DRVA TCMP TZCP TADD TSUB TRD TWR HOUR GRY GBIN RD3A WR3A LD= LD> LD< LD<> LD≤ LD≥ AND= AND> AND< AND<> AND≤ AND≥ OR= OR> OR< OR<> OR≤ OR≥ LDP LDF ANDP ANDF ORP ORF MC MCR INV
脉冲上升沿 脉冲下降沿
39 SFRD 40 ZRST 41 DECO 42 ENCO 43 SUM 44 BON 数据处理 45 MEAN
扫地机的智能控制系统设计-本科毕业设计说明书
本科毕业设计说明书扫地机的智能控制系统设计SWEEPER INTELLIGENT CONTROLSYSTEM DESIGN学院(部):电气与信息工程学院专业班级:电气#####学生姓名:######指导教师: ##########年月日扫地机的智能控制系统设计摘要目前,各式各样的服务机器人越来越多应用于人们的生活中,从事着与人们生活息息相关的服务工作,极大地提高和改善了人们的生活质量。
室内智能扫地机器人就是在这种背景下诞生的一种家庭服务机器人。
室内智能扫地机器人的路径规划采用区域充满的规划方法,目标是在设定区域内寻找一条从始点到终点且经过所有可达点的连续路径。
根据建立的扫地机器人平台,提出清扫机器人随机运动路径规划算法.机器人利用其上安装的红外传感器和摄像头来识别和感知房间环境,机器人开始以螺旋运动方式覆盖房间的空白区域,当遇到障碍物时,启动障碍物应对策略,通过计算机软件仿真和在房间环境中进行实验验证了该算法的有效性。
关键词:扫地机器人,单片机,环境识别,路径规划SWEEPER INTELLIGENT CONTROLSYSTEM DESIGNABSTRACTAt present time,more and more various of service robots are designed and applied to people’s daily life.The application of these robots is promoting the quality of people's life tremendously as they deal with the works related to people’s life closely。
Indoor automatic cleaning robot is one of these service robots developed to help people to carry out the troublesome room cleaning work。
K2000M系统PLC调试手册

选择刚度即为调整 PA55 参数。 可设置的最大刚度受传动系统的刚性限制。
参数序号
描述
缺省值
最小值
最大值
55
系统刚度
4
0
12
通常可划分为:低刚性系统 0~3 级,中刚性系统 4~6 级,高刚性系统 6 级以上。刚度值越小,系统响
应越慢,抗扰动能力越弱。刚度值越大,系统响应越快,抗扰动能力越强,刚度值过高则容易引起振动。
其它版本软件的系统的不同之处请参看“补充说明书”。
n 数控机床的机能不仅由数控系统来决定,而且是由机床、强电、驱动系统等组合一起的机能决 定的,而这组合后的机能、编程、操作的详细情况,在与机床结合后才决定。
n 在进行机床调试过程中,不能一上来就运转机床,要通过试运行来确认机床的状态;确认项目 包括:使用单程序段、进给速度倍率、机床锁住功能、没有安装工件和刀具时的空运转。如果 不能肯定机床的运转正常,会因为预想不到的运转而损坏机床。
同 Er041 故障对策。若频繁出现此故障,则表明编码 器损坏,应更换电机。
1.12. SD310 与总线系统的连接
设定值
备注
04
控制方式选择
POS
SPD 使用系统位置环,对驱动器作速度处理
70
伺服总线站地址
1
轴号 根据当前轴号设置
注:应注意各轴驱动器的轴号与站号一一对应,否则站地址冲突会导致驱动器与系统连接不上。
8毫米
10毫米
PA12
4096
16384
8192
2048
1微米
PA13
125
625
375
125
PA12
2048
8192
4096
水下仿生微机器人驱动信号发生算法

关 键 词 :I — A板 ; 形 ; 号 ; 法 PO D 波 信 算
Un e wa e imi t c o o o ’ iig d r t rB o me i Mir r b t S Dr n c v Sin l n r t g Ar h t g a Ge e a i i me i n t c
o d r t rve Bim i e i u t—e g d M ir r bo ’ n elg ntm ae il , d fe e tk n s o u e ia r e o d i o m tc m lilg e c o o t S i tli e tras if r n i d f n m rc l
水 下 仿 生微 机器 人 驱动 信 号 发 生 算 法
严本 男 , 秀赛 叶
( 尔 滨 工 程 大 学 自动 化 学 院 , 龙 江 哈 尔 滨 10 0 ) 哈 黑 5 0 1
摘
要 : 用 基 于外 设组 件 互 连 标 准 ( e p e l o pnn l en etn P I总 线 的 1 采 pr hr m oetne onc o , C) i ac i r i 4位 1 6通 道 模 拟 量 输 出板 卡
工业机器人现场编程16实训任务
轮廓轨迹点
注意:机器人在做逼近运动时, 圆弧过渡距离应实际测量并设置。
• 以外部TCP的轨迹轮廓运动编程的操作步骤 1)利用控制抓爪打开/闭合的输出端信号OUT[17],用手将标牌夹紧到抓爪中。 2)新建一个程序模块,命名为“WaiBuTCPProg”。
安装标牌
新建程序模块
3)打开新建模块,将默认的HOME程序行中的PTP改为SPTP,HOME改为HOME7。 4)调整机器人姿态,选择一合适位置作为机器人HOME点。
设置坐标系选项
确认指令添加
13)在当前选定的坐标系下,将机器人移至P4点位置,调整机器人姿态使工具纵轴垂 直于轨迹轮廓。
14)机器人到达P14点时,添加指令SLIN。
将机器人移至P4点
添加机器人运动到P4点的指令
15)在P4点位置实现轨迹逼近运动,设置圆滑过渡距离为20mm。 16)移动速度设定为0.3m/s。
8)在运行键/6D鼠标选项中选择使用工具坐标系。
设置坐标系选项
选择工具坐标系
9)在当前选定的坐标系下,将机器人移至P3点位置,调整机器人姿态使工具纵轴垂直 于轨迹轮廓。
10)在机器人到达P3点位置时,添加指令SPTP(或SLIN)。
将机器人移到P3点位置
添加机器人移动到P3点的指令
11)选择工具坐标系(编号13)和基坐标系(编号7),外部TCP选项中值为TRUE。12) 关闭选项设置窗口,单击“指令OK”按钮,确认采用当前位置。
7)设置完成后,关闭触发器设置窗口。
添加喷嘴打开的条件
关闭设置界面
8)单击“指令OK”按钮,在弹出的选择对话框中,选择“是”,确认继续。
9)机器人运动到P14点的同时,涂胶动作完成,喷嘴关闭。单击P14点指令行,选择 “更改”,单击“切换参数”,选择“逻辑”选项。
加信变频器说明书
特别注意事项: ★实施配线或需要更换零部件,请务必关闭电源。 ★变频器内部的电子元器件对静电特别敏感,因此不可将异物 置入其内部或触摸电路板。 ★切断交流电源后,变频器内线路板上指示灯未熄灭前,表示 变频器内部仍有高压(危险),请勿触摸内部电路及零部件。 ★变频器接地端“E ”务必正确接地。 ★绝对不可以将变频器输出端子 U 、V 、W 接至 "A C"(工频)电 源上。 ★变频器在运行过程中,切勿在输出端进行负载切换。 ★一般应用场合下,变频器应定期(视现场情况而定,一般为 1~3 个月)打开盖板,对变频器进行吹风(抽风)除尘处理。
第五章 功能及参数 ………………………………………………19 5.1 功能码表 …………………………………………………19 5.2 功能码参数详细说明 ……………………………………28
第六章 常见对策及维护 …………………………………………66 6.1 故障诊断 ………………………………………………66
可选件
远程控制电缆、输入输出电抗器、制动单元、制动电阻、频 率设定用电位器、电源滤波器
使用场所
室内,避免阳光直晒,无腐蚀性气体,无导电、爆炸性尘埃
使 海拔高度 用 环境温度 环 湿度
低于 1000 米 -10℃~+40℃ 小于 90%R H ,(不结露)
境 振动
小于 0.5g
贮存温度
-20℃~+60℃
适配电机功率 (kW ) 0.75 1.1 1.5 2.2 3.0 4.0 5.5 7.5 11 15 18.5 22 30 37 45 55 75 90
W W 1 H H1 H2
G
ΦD
键盘 开孔
备注
125 110 170 159 -- 123.5 4
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
[1] IMSTP(Immediate STOP)緊急停止
1.意義:
SOFTWARE上之緊急停止,IMSTP回路連接B接點,回路”開”後,成為緊急停止狀態。
2.信號之使用範例(Relay 或PLC):
安全PLUG 緊急停止SW
3.注意:
本回路,B接點,未使用時要短路。
因為ROBOT緊急停止對機械部份之負荷大,所以基本上ROBOT要一時停止時,使用HOLD。
另外B接點為常閉開關,A接點為常開開關。
[2] HOLD(一時停止)
1.意義:
一時停止的信號輸入時,回路在OFF狀態¸ROBOT將減速後停止。
ROBOT
成為PAUSE狀態。
再度啟動時,HOLD信號ON後,START以PULSE信號輸出。
2. 信號之使用範例:
3. 注意:本回路B接點,未使用時要短路。
4. 備註: HOLD與IMSTP輸入後¸Robot停止時的差異。
[3]SFSPD(SAFETY SPEED)安全速度
1. 安全柵內之教導作業時使用。
本信號OFF 時,外部啟動輸入信號(如RSR 或START)無效,以確保作業者之安全。
又ROBOT 自動運轉中,本信號OFF 時,ROBOT 暫時停止。
此時可用教導盤操作ROBOT 。
又,教導或再啟動暫時停止的ROBOT 時有速度制限。
2. 信號之使用範例:
3. 注意: 本回路,未使用時要短路。
4. 備註: SFSD 有效時¸限制速度可由系統變數設定。
例如:
$SCR.$FENCEORD :設定安全柵開時的最高速度。
$SCR.$SFJOGVLIM :設定安全柵開時¸JOG 的最高速度。
$SCR.$SFRUNOVLIM :設定安全柵開時¸程式執行中的最高速度。
安全速度
安全PLUG
[4]CSTOP1 (CYCLE STOP INPUT) RSR 預約解除
1. 意義:
RSR 初期啟動信號之取消信號。
◎CYCLESTOP1輸入前
◎CYCLESTOP1輸入後
2. 信號之使用範例(RSR 未使用時,不要使用):
RSR3
RSR 預約解除
CSTOP1
ROBOT
RSR2 RSR1
3. 注意:
PARAMETER $SHELL_CFG. $USE_ABORT FALSE時,且A之狀態為TRUE時,現在執行中之RSR1程式動作立即停止,PROGRAM成為終了狀態。
4. 備註:
一般的ROBOT之CYCLE循環狀態(RSR1輸入1次後,開始循環)之解除如下:
PROGRAM:RSR0001
:LBL(1)
:P(1)
:
:JMP
52:LBL(2)
53:END
◎DI(1)是設定為系統操作盤上的循環停止SW(ALTERNATE)。
[5]FAULT RESET異常解除
1.意義:
ROBOT異常發生後,異常原因解除的輸入信號。
本信號ON時,ROBOT 恢復待機狀態。
例如,FAULT RESET的輸入,可解除緊急停止的狀態。
若本信號ON∕OFF後,仍不會解除ALARM時,表示異常還沒有解決。
2. 信號之使用範例
[6]START 啟動
1. 意義:
在程式執行過程中,暫時停止。
若要再次啟動,請注意程式中的游標位置,啟動時將由目前游標位置接下去執行。
程式執行前是否出現對話框可由系統變數$SHELL_CFG .$CONT_ONLY 設定。
PAUSED (一時停止)中之程式再啟動時,$SHELL_CFG .$CONT_ONLY 若設為TRUE ,則將有一對話框將再次詢問確定,是否由游標所在位置啟動。
若設為FALSE ,則無詢問確定,直接由游標所在位置啟動。
(標準設定) 為確保安全,建議設為TRUE 。
2. 信號之使用範例
3. 注意:
$SHELL_CFG .$CONT_ONLY 若設為FALSE 時,按START 後,將無預先警告而立即起動目前畫面上之程式。
故為了安全起見¸此時PLC 中要加裝上述的範例回路。
ROBOT 動作 HOLD ON OFF
X 080
再啟動鈕 ROBOT
PAUSED
[7]HOME
現在本信號未使用
[8]ENBL
1.意義:
ROBOT動作許可信號。
當本信號OFF時,無法執行程式。
故平常信號為ON。
2.信號之使用範例:
[9]RSR1~4(Robot Service Request)
1. 意義:
自動運轉時,從外部選擇程式並起動的信號。
如下圖所示1個信號對應1個程式¸最大選擇程式數量4個。
信號程式
RSR1───→RSR0001
RSR2───→RSR0002
RSR3───→RSR0003
RSR4───→RSR0004
RSR程式啟動前的Time chart如下圖所示
RSR1(1)
ACK1(O)
RSR2(1)
ACK2(O)
2. 信號之使用範例:
(1) 由外部按鈕直接起動RSR 程式
製具1按鈕
製具2按鈕 製具3按鈕 製具4按鈕 SW1
SW1
SW3
SW4
RSR0001 RSR0002
(2) 由汎用信號輸入啟動RSR 程式
RSR0001
1:IF GI(1) = 1 CALL A-PROG 2:IF GI(1) = 2 CALL B-PROG
100:IF GI(1) = 100 CALL Z-PROG
機種信號
機種確認
[10]PNS1~8
1.
意義:
自動運轉時,從外部選擇程式並起動的信號。
但是無法和RSR 同時使用。
PNS 啟動信號如下圖所示依二進位方式選擇程式啟動。
PNS 可選擇之程式最大至255個。
PNS 程式啟動前的Time chart 如下圖所示
表示滿足Remote 條件
CMDENBL(O)
PNS1~8(1)
PNSTROBE(1)
讀取PNS (內部處理) SNACK(O)
SNO1~8(O)
PROD_START(1)
PROGRUN(O)
SNACK 和SNO 大概同時變ON 但是比SNO 遲。
PROD_START 在變成OFF 時啟動程式。
但是,ON
的狀態要保持100msec 以上。
沒有一直保持ON 的設定法。
2. 信號之使用範例
SNO1, SNO2…:為ROBOT確認PNS****信號回饋回來的信號。
3. 備註:
RSR及PNS的程式名稱可由設定BASE號碼更改。
例如,RSR0001~0004及PNS0001~PNS0255可分別改為RSR 0201~0204 及PNS 5001~5255。
教示盤內的設定畫面(RSR的狀態)如下:
[11]PNSTROBE
意義:
由PLC程式中選擇PNS1~8啟動輸出信號至ROBOT,並由PLC程式輸出至PNSTROBE信號(即選擇信號輸出完畢OK)。
當ROBOT收到此信號後,ROBOT 將輸出(PNS1~PNS8)相同訊號至(SN01~SN08),回到PLC做確認。
[12]PROD START
意義:
當PLC收到由ROBOT輸出之確認信號” SNACK ”後,此信號可確認雙方選擇的輸出是否為相同信號。
當相同時,可由PLC送一訊號給ROBOT 之
PROD_START,依此信號啟動ROBOT。
若信號不相同時,可能為信號線斷線,此時不可由PLC給予PROD_START信號,此時請於操作盤上表示“程式選擇錯誤”之Message Lamp。
PNSTROBE與PRO D_START為PNS啟動信號。
RSR使用時,此信號不使用。