Procedural Modeling of Cracks and Fractures
mnn模型量化剪枝蒸馏
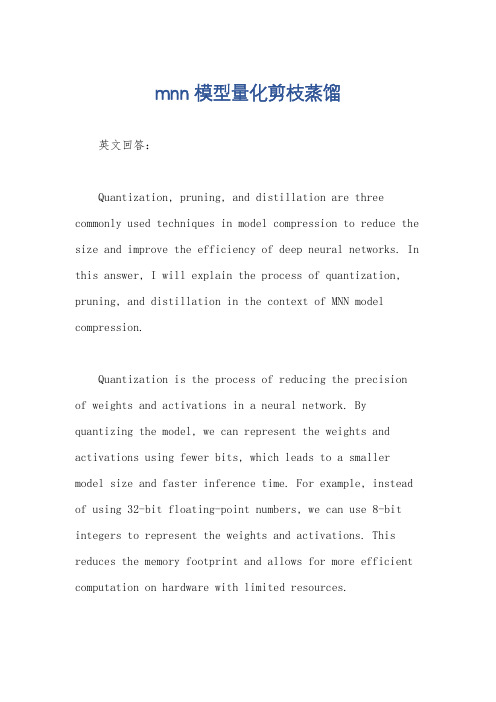
mnn模型量化剪枝蒸馏英文回答:Quantization, pruning, and distillation are three commonly used techniques in model compression to reduce the size and improve the efficiency of deep neural networks. In this answer, I will explain the process of quantization, pruning, and distillation in the context of MNN model compression.Quantization is the process of reducing the precision of weights and activations in a neural network. By quantizing the model, we can represent the weights and activations using fewer bits, which leads to a smaller model size and faster inference time. For example, instead of using 32-bit floating-point numbers, we can use 8-bit integers to represent the weights and activations. This reduces the memory footprint and allows for more efficient computation on hardware with limited resources.Pruning, on the other hand, involves removing unnecessary connections or neurons from a neural network. The idea behind pruning is that not all connections or neurons contribute equally to the network's performance. By removing the less important connections or neurons, we can reduce the model size and improve the inference speed without sacrificing much accuracy. Pruning can be done based on various criteria, such as weight magnitude or activation importance. For example, we can prune connections with small weights or neurons that have low activation values.Distillation is a technique that involves training a smaller "student" network to mimic the behavior of a larger "teacher" network. The teacher network is usually a larger and more accurate model, while the student network is a smaller and less accurate model. The student network is trained to match the output probabilities of the teacher network, using a combination of the teacher's soft targets and the ground truth labels. The idea behind distillation is that the student network can learn from the teacher network's knowledge and generalize better than if it wastrained from scratch. This allows us to compress the knowledge of the larger model into a smaller model without sacrificing much accuracy.To illustrate the process of quantization, pruning, and distillation, let's consider the example of compressing a large image classification model.First, we can start by quantizing the weights and activations of the model. For instance, we can convert the 32-bit floating-point weights to 8-bit integers. This reduces the model size and allows for faster inference on hardware with limited resources.Next, we can apply pruning to remove unnecessary connections or neurons from the model. For example, we can prune connections with small weights or neurons that have low activation values. This further reduces the model size and improves the inference speed.Finally, we can use distillation to train a smaller student network to mimic the behavior of the larger teachernetwork. The student network is trained to match the output probabilities of the teacher network, using a combination of the teacher's soft targets and the ground truth labels. This allows us to compress the knowledge of the larger model into a smaller model without sacrificing much accuracy.中文回答:量化、剪枝和蒸馏是模型压缩中常用的三种技术,用于减小深度神经网络的大小并提高效率。
lda分类器 例题

lda分类器例题
摘要:
1.介绍拉格朗日正交多项式
2.拉格朗日正交多项式的性质
3.拉格朗日正交多项式的应用
4.结论
正文:
拉格朗日正交多项式是一种在数学和工程领域中广泛应用的数学工具。
这种多项式具有一些独特的性质,使其在许多方面都非常有用。
首先,让我们看看拉格朗日正交多项式的定义。
拉格朗日正交多项式是一组多项式,它们在特定的区间内是正交的。
这意味着,任何两个拉格朗日正交多项式在该区间内的乘积为零。
这个特性使得拉格朗日正交多项式在许多应用中非常有用,因为它们可以被用来构建一组基,这个基在特定区间内是线性无关的。
拉格朗日正交多项式的另一个重要性质是它们是唯一的。
也就是说,对于任何给定的区间,只有一组拉格朗日正交多项式与之对应。
这个性质使得拉格朗日正交多项式在许多应用中都具有确定性。
拉格朗日正交多项式的应用领域非常广泛。
它们在数值分析、工程设计、物理学和金融学等领域都有应用。
例如,在数值分析中,拉格朗日正交多项式可以用来求解微分方程,或者在有限元分析中用来构造基函数。
在工程设计中,拉格朗日正交多项式可以用来设计结构,以使其在特定条件下具有最优性能。
在物理学中,拉格朗日正交多项式可以用来描述系统的运动,而在金融学中,它们可以用来构建期权定价模型。
总的来说,拉格朗日正交多项式是一种非常有用的数学工具,具有独特的性质和广泛的应用。
模拟退火算法缩写
模拟退火算法缩写
模拟退火算法(Simulated Annealing Algorithm)的缩写可以有多种形式,常见的缩写包括:SA、SimAnneal 或 Simulated Annealing。
这些缩写通常在学术文献、研究报告或代码中使用,以简洁地表示模拟退火算法。
模拟退火算法是一种启发式随机搜索算法,用于在复杂的优化问题中找到近似最优解。
它基于物理退火过程的原理,通过模拟物质在加热和冷却过程中的行为,逐步搜索更优的解决方案。
在模拟退火算法中,通过随机生成候选解,并根据一个适应度函数评估每个候选解的质量。
然后,根据概率接受较差的候选解,以避免陷入局部最优解。
随着算法的进行,温度逐渐降低,接受较差解的概率也逐渐减小,从而使算法更倾向于找到全局最优解。
模拟退火算法在许多领域都有应用,如组合优化、神经网络训练、图像处理等。
它的优点包括在一定程度上避免陷入局部最优、对初始解的依赖性较小、能够处理复杂的约束和目标函数等。
需要注意的是,缩写的使用可能因领域、团队或个人偏好而有所不同。
在具体的上下文中,可能会使用其他特定的缩写或术语来表示模拟退火算法。
此外,在使用缩写时,确保在相关文档或说明中明确其含义,以避免混淆和误解。
希望以上内容对你有所帮助!如果你对模拟退火算法或其他相关问题有更多的疑问,请随时提问。
模拟退火算法
模拟退火算法(Simulated Annealing)是一种随机优化算法,其基本思想是将问题转化为能量最小化问题,在解空间中以概率形式进行搜索空间,从而达到全局优化的目的。
一、算法原理的原理源于冶金学中的“模拟退火”过程。
在冶金学中,模拟退火是一种将材料加热到足够高的温度,使得原子以无序方式排列,并随着温度逐渐下降,原子逐渐重新排列成为有序状态的过程。
类似地,在算法中,模拟退火过程由三个参数组成:初始温度、降温速率和停止温度。
算法从一个初始解开始,随机产生新解,并计算新解与当前解之间的能量差。
如果新解的能量小于当前解的能量,则直接接受新解,如果新解的能量大于当前解的能量,则以一定的概率接受新解,以避免过早陷入局部最优解。
通过不断降温的过程,在搜索空间中进行随机跳跃,并慢慢收敛到全局最优解。
二、算法流程的流程如下:1. 设定初始温度、降温速率和停止温度。
2. 随机生成一个初始解,并计算其能量。
3. 生成一个新解,并计算新解与当前解之间的能量差。
4. 如果新解的能量小于当前解的能量,则接受新解。
5. 如果新解的能量大于当前解的能量,则以一定的概率接受新解。
6. 降温,更新温度。
7. 判断算法是否收敛,如果未收敛则返回步骤2。
三、应用场景广泛应用于组合优化问题、图论问题、生产调度问题等领域。
例如:1. 旅行商问题:在旅行商问题中,可以通过搜索空间中随机跳跃的方式找到最短路径,从而达到全局最优解。
2. 排课问题:在学校的排课问题中,可以帮助学校最优化考虑不同的课程安排,得到最优化的课程表。
3. 生产调度问题:在生产调度问题中,可以帮助生产企业在限制资源的条件下找到最优化的生产方案,提高生产效率。
四、优缺点作为一种优化算法,具有以下优点:1. 全局搜索能力强:能够在搜索空间中进行全局搜索,并趋向于全局最优解。
2. 算法收敛性好:在算法搜索到解后,能够很快地达到最优解,收敛速度较快。
3. 收敛到局部最优解的可能性较小:由于算法在跳跃过程中具有随机性,因此收敛到局部最优解的可能性较小。
Calibration procedures for a computational model of ductile fracture

Calibration procedures for a computational model of ductile fracture Z.Xue a,1,M.G.Pontin b,2,F.W.Zok b ,J.W.Hutchinson a,*aSchool of Engineering and Applied Sciences,Harvard University,Cambridge,MA,United States b Materials Department,University of California,Santa Barbara,CA,United Statesa r t i c l e i n f o Article history:Received 18August 2009Received in revised form 22October 2009Accepted 29October 2009Available online 1November 2009Keywords:Ductile fracture Computational fracture Shear fracture Damage parametersa b s t r a c tA recent extension of the Gurson constitutive model of damage and failure of ductile struc-tural alloys accounts for localization and crack formation under shearing as well as tension.When properly calibrated against a basic set of experiments,this model has the potential topredict the emergence and propagation of cracks over a wide range of stress states.Thispaper addresses procedures for calibrating the damage parameters of the extended consti-tutive model.The procedures are demonstrated for DH36steel using data from three tests:(i)tension of a round bar,(ii)mode I cracking in a compact tension specimen,and (iii)shearlocalization and mode II cracking in a shear-off specimen.The computational model is thenused to study the emergence of the cup-cone fracture mode in the neck of a round tensilebar.Ductility of a notched round bar provides additional validation.Ó2009Elsevier Ltd.All rights reserved.1.IntroductionProgress in computational fracture mechanics has paralleled advances in constitutive models that incorporate damage mechanisms.For many ductile structural alloys the mechanism governing failure is void nucleation,growth and coalescence.The grand challenge for these alloys is the development of a computational capability for predicting localization,crack for-mation and crack propagation under all states of stress.Capturing both tensile (mode I)and shear (mode II)fractures has been particularly challenging.When properly calibrated for a specific structural alloy,the Gurson model [1]and some of its close relatives,such as the Rousselier model [2],have shown considerable promise for characterizing mode I crack growth[3–8].In addition,the models have been used to simulate transitions from mode I crack growth to mixed mode shear crack-ing in the cup-cone fracture process of round tensile bars [9,10]and in three-dimensional through-cracks in thin plates [11].Such transition problems are generally more challenging because the constitutive models have not been developed to explic-itly address damage under shear dominated conditions.A recent extension of the Gurson model [12]specifically incorporates damage in shear,adding the flexibility to address shear ruptures as well as tension dominated failures.This extension will be employed here in conjunction with a suite of three tests (round bar tension,mode I compact tension,and mode II shear-off)to calibrate the constitutive parameters for the structural steel,DH36.For verification,the calibrated model is then used to study the failure details of several other problems.To put the overall objectives of this work into some perspective,it is noted that three parameters are required to calibrate the extended Gurson model:the initial void volume fraction,f 0,a shear damage coefficient,k x (defined below)and the finite element size,D .To accurately characterize localization and fracture,D must be on the order of the spacing between the voids 0013-7944/$-see front matter Ó2009Elsevier Ltd.All rights reserved.doi:10.1016/j.engfracmech.2009.10.007*Corresponding author.E-mail address:hutchinson@ (J.W.Hutchinson).1Present address:Schlumberger Reservoir Completions,Rosharon,TX,United States.2Present address:Ceradyne,Costa Mesa,CA,United States.Engineering Fracture Mechanics 77(2010)492–509Contents lists available at ScienceDirectEngineering Fracture Mechanicsj o u r n a l h o m e p a g e :w w w.elsevier.c om /loc ate/engfracmechthat dominate the fracture process,typically from tens to hundreds-of microns.With mesh requirements this fine,it is only possible to predict the onset and propagation of cracks in relatively small components or in larger structures where the loca-tion of the failure can be anticipated in advance.In contrast,it would not be feasible to employ a fracture model of this type to analyze fractures in large structures where the failure locations cannot be anticipated.Under such circumstances,because the finite element size for a large structure is necessarily orders of magnitude greater than void spacing and often larger than plate thickness,coarser criteria based on a critical effective plastic strain or a through-thickness cohesive zone must be em-ployed.These criteria must also be calibrated for each material,but against tests that make no attempt to resolve the fine scale fracture processes relevant for the present class of models.The two classes of fracture models complement each other.In principle,computations based on a fine scale model could be used to calibrate a coarse scale model.2.The extended Gurson modelThe Gurson model is an isotropic formulation that employs the mean stress,r m =r kk /3,and the effective stress,r e ffiffiffiffiffiffiffi3J 2p ¼ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi3s ij s ij =2p ,where s ij ¼r ij À13r kk d ijis the stress deviator.The extended model [12]employs,in addition,the third stress invariantJ 3¼det ðs Þ¼13s ij s ik s jk ¼ðr I Àr m Þðr II Àr m Þðr III Àr m Þð1Þwhere the expression on the right is couched in terms of principal stresses,assumed to be ordered asr I P r II P r III .Thenon-dimensional metric x ðr Þ¼1À27J 3r 3e 2ð2Þlies in the range,06x 61,with x ¼0for all axisymmetric stress states,r I P r II ¼r III or r I ¼r II P r III ;ð3Þand x ¼1for all states comprised of a pure shear stress plus a hydrostatic contribution,r I ¼s þr m ;r II ¼r m ;r III ¼Às þr m ðs >0Þð4ÞThe original Gurson model was formulated and calibrated based on the mechanics of void growth under axisymmetric stress states.The extension [12]does not alter the model for these states.The extension modifies the predictions for states with non-zero x ðr Þ.In particular,a contribution to damage growth under pure shear stress states is accounted for in the extension whereas the original Gurson model predicts no change in damage for states having r m ¼0.NomenclatureA 0;Across-sectional area of neck:initial,current Dcharacteristic element size D P ij plastic strain rate EYoung’s modulus f 0;f ;f c ;f fvoid volume fraction:initial,current,onset of coalescence,failure Hplate thickness J 3stress invariant k xshear damage coefficient Nstrain hardening exponent q 1;q 2;q 3fitting parameters in Gurson model Rpunch radius s ijstress deviator d punch displacemente fductility—true strain in neck at failure e P M ;r Mintrinsic true plastic strain and stress in tension (damage-free)e peak T ;r peak T true strain and stress at maximum nominal stress r ij ;r e ;r m true stress,effective stress,mean stress r I P r II P r III true principal stressesx measure of shearing relative to axisymmetric stressingZ.Xue et al./Engineering Fracture Mechanics 77(2010)492–509493The yield surface of the extended Gurson model is the same as the original.Including the fitting parameters,q 1,q 2and q 3,introduced by Tvergaard [13],it is given in terms of the effective and mean stress measures byF ðr e ;r m ;f Þ¼r e r M 2þ2q 1f cos h 3q 2r m r M Àð1þq 3f 2Þð5ÞThe current state is characterized by f ,the ‘‘apparent”void volume fraction,and r M ,the current effective stress governing flow of the damage-free matrix material.All quantities not labeled with the subscript M represent overall quantities asso-ciated with the bulk material.Normality implies that the plastic strain rate,D Pij ,is given byD Pij ¼1h P ij P kl _r kl ð6Þwhere P ij ¼@F r ij ¼3s ij r M þfq 1q 2r M sin h 3q 2r m r M d ij ð7ÞIn finite strain formulations,_rij is identified with the Jaumann rate of stress.The hardening modulus,h ,is identified in the Appendix A .If r m ¼0,P kk ¼0and the rate of plastic volume change vanishes,i.e.,D Pkk ¼0;this feature persists in the exten-sion.In the absence of nucleation,the extension of the Gurson model posits_f ¼ð1Àf ÞD p kk þk x f x ðr Þs ij D p ij r e ð8ÞThe first contribution is that incorporated in the original model while the second is the crux of the extension.As previ-ously noted,the modification leaves the constitutive relation unaltered for axisymmetric stress states.In a state of pureshear,however,(8)gives _f ¼k x f _cP =ffiffiffi3p ,where _c P is the plastic shear strain rate and k x is the shear damage coefficient,the sole new parameter in the extended model.The inclusion of the second term in (8)rests on the notion that the volume of voids undergoing shear may not increase,but void deformation and reorientation contribute to softening and constitute an effective increase in damage [14–16].In addition,the second term can model damage generated by the nucleation in shear of tiny secondary voids in void sheets linking larger voids.Thus,in the extension,f is no longer directly tied to the plastic volume change.Instead,it must be regarded either as an effective void volume fraction or simply as a damage param-eter,as it is for example when the Gurson model is applied to materials with distinctly non-spherical voids.Further discus-sion and illustrations of the extension are given in [12],where the emphasis is on its role in shear localization.The remaining equations specifying the entire description of the model are listed in the Appendix A .Included is the specification of the widely used technique [13]that accelerates damage from f ¼f c to f ¼f f ,at which point the material element is deleted.De-tails of the numerical algorithm used to implement the constitutive model in the finite element code ABAQUS Explicit [16]are also presented in the Appendix A .3.Outline of the calibration protocolThe elastic–plastic inputs into the extended Gurson Model are the Young’s modulus,E ,the Poisson’s ratio,m ,and the intrinsic stress–strain response of the damage-free material (f 0¼0).The two damage-related input parameters are theinitial Fig.1.Optical micrograph of polished and etched cross-section through DH36steel plate,showing a microstructure of ferrite (light)and pearlite (dark).494Z.Xue et al./Engineering Fracture Mechanics 77(2010)492–509effective void volume fraction,f0,and the shear damage coefficient,k x.Additionally,because the constitutive model contains no material length scale,the size of thefinite element mesh,D,is calibrated through crack growth predictions,employing well-established procedures[4,7].This paper addresses the general task of calibrating the three fracture-related parameters:f0,k x and D.The procedures are demonstrated through experiments and analyses of DH36steel(Fig.1):a high strength alloy commonly used in ship con-struction.Following extensive prior work on calibration procedures for the standard Gurson model(e.g.,[4,7]),the present study employs data from a mode I fracture test and a round bar tensile test to identify intrinsic uniaxial stress–strain behav-ior,f0and D.Additionally,a shear-off test is added to the suite of tests to determine the shear damage coefficient,k x.The paper is organized following closely the steps in the calibration protocol:Section4:Determination of the intrinsic stress–strain response of the undamaged material from round bar tensile tests and establishing that f0,k x and D have little influence on the plastic response until neck development is quite advanced.Section5:Determination of f0and D from compact tension mode I fracture tests and establishing that k x has little influ-ence on crack growth prediction when the crack is planar.Section6:Determination of k x using data from shear-off tests and the previously determined f0and D.Section7:Discussion of the applicability of the calibrated constitutive model to the cup-cone failure mode as one illus-tration and the ductility of notched round bars as another.Possible variations in the identification protocol for other materials are also discussed.The three calibration tests were conducted under quasi-static loading,while all simulations were carried out using the dynamic code ABAQUS Explicit.In order to minimize inertial effects and efficiently simulate the quasi-static tests in the ex-plicit code,a preliminary series of calculations with differentfixed applied loading rates was performed for each test con-figuration.At some loading rate,as the rates decrease,the simulations converge to a quasi-static limit.That loading ratewas then employed in all subsequent calculations.Material strain rate dependence is ignored in the presentcomputations.Fig.2.Tensile specimen geometry andfinite element mesh.Z.Xue et al./Engineering Fracture Mechanics77(2010)492–5094954.Intrinsic plastic response of the undamaged materialThe plastic response of the undamaged material (f 0¼0)was obtained from quasi-static uniaxial tensile tests on round bars coupled with elastic–plastic finite element computations.The test geometry and finite element mesh are shown in Fig.2.The nominal axial strain e N was measured using a non-contacting laser extensometer over a central 12.7mm length within the gauge section.Prior to necking,the true (logarithmic)strain is given by e T ¼ln ð1þe N Þand the true stress by r T ¼r N ð1þe N Þ,where r N is the nominal stress (load/initial area).To ascertain the true response in the post-necking regime,computations were performed using an assumed form of the stress–strain relation (detailed below)and matching the pre-dicted nominal stress–strain curves with those obtained experimentally.To accurately capture strain localization,a finite strain formulation of elasto-plastic theory was employed in the finite element model.Four-node axisymmetric elements 0 0.1 0.2 0.3 0.4 0.5900800700600500400300200100N=0.200.1850.16Experimental True strain, εT0 0.1 0.2 0.3 0.47006005004003002001000N=0.200.1850.16Experimental Nominal strain, εNεσT peak T peak ,()of the true tensile stress–strain curve beyond the onset of necking and (b)the corresponding element analysis.Error bars represent the full range of experimental measurements from six tests.extensometer over a 12.7mm gauge length near the specimen center.The nominal strain,defined as consistently employed in both the experiments and the finite element calculations.The 496Z.Xue et al./Engineering Fracture Mechanics 77(2010)492–509with reduced Gaussian integration (CAX4R in ABAQUS/Explicit [16])were used.The model was based on an axisymmetric mesh comprised of square section elements with size,D =50l m,providing more than 30elements across the gauge radius.The element size was selected to be consistent with the value emerging from the calibration of the mode I fracture data,pre-sented in the next section.Nevertheless,since the selected element size is already very much smaller than the macroscopic specimen dimensions and hence the strains are adequately resolved,further reductions in element size would have essen-tially no effect on the intrinsic (damage-free)stress–strain response.Additional computations were performed to demon-strate that f 0and k x do not affect the identification of the true stress–strain curve even up to strains approaching that for rupture.The average true stress–strain curve from five tensile tests is plotted in Fig.3a.This curve was subsequently used to char-acterize the stress–strain response for stresses below that corresponding to the load maximum,denoted r peakT.To extrapolate beyond r peak T ,a true stress–strain curve of the form r T ¼r peak T ðe T =e peak TÞN was assumed.A preliminary estimate of the strain hardening exponent N was obtained by a least squares fit of the small strain data.A series of finite element computations was then performed to ascertain the full nominal tensile stress–strain curve,using a range of values of N ,guided by the pre-ceding curve fitting.As shown in Fig.3b,the results for N ¼0:185(and f 0¼0)accurately replicate the experimental mea-surements up to the onset of rupture (at a nominal strain of e N ¼0:32).In summary,the true stress–strain curve used tocharacterize the damage-free material (f 0¼0)is given by the experimental curve below r peakT and the power law extrapo-lation at stresses above r peak T .For e N <0:3,void growth has almost no effect on the tensile behavior of DH36.This result is demonstrated in Fig.4by comparing the experimental data with finite element computations based on a hardening exponent N ¼0:185and several representative initial void volume fractions (including the Mises limit,wherein f 0¼0).Other than f 0,k x and D ,the basic parameters characterizing the constitutive model that are used in all simulations in this paper are:E ¼210MPa ;m ¼0:3;N ¼0:185;q 1¼1:5;q 2¼1;q 3¼2:25;f c ¼0:15and f f ¼0:25ð9ÞThe comparisons show that the effects of void growth,manifested in a divergence in the stress–strain response from that of a Mises material,are important only very near the point of final rupture for the DH36tensile specimen.Their effect is to accelerate the softening of the material such that the load drops more rapidly than that predicted for the damage-free mate-rial.Further details of the failure process in the neck,including formation of a cup-cone fracture surface,are presented in Section 7.5.Determination of f 0and D from compact tension testCompact tension tests were performed on specimens with the geometry shown in Fig.5a.Crack mouth opening displace-ment was measured using a non-contacting extensometer and a pair of fiducial tapes mounted on the specimen edge,sep-arated by a distance of 14mm.Optical images of the broad sample surface were periodically recorded.The experimental 0 0.1 0.2 0.3 0.47006005004003002001000f o = 0.0010.0020.003Experimental Nominal strain, εNf o =0(Mises)k ω = 0fraction f o on the computed nominal tensile stress–strain response.Over the pertinent range of experimental measurements up to the onset of fracture.Z.Xue et al./Engineering Fracture Mechanics 77(2010)492–509497measurements and observations are summarized in Figs.6and 7.Significant nonlinearity due to plasticity is evident in both the load–displacement response and in the optical images at displacements above 0.5mm.Following an initial rising por-tion,the load–displacement curve reaches a maximum,at a displacement of about 3–4mm.This point corresponds to the emergence of a crack on the external surface of the sample (Fig.7d–f ).Further growth both at the surface and in the interior occurs under decreasing load.The corresponding finite element model is shown in Fig.5b.In the present analysis,deformations are restricted to be symmetric with respect to the mid-plane such that a symmetry boundary condition is applied to the mid-plane.Conse-quently,the region meshed is only one half of the full specimen.Eight-node brick elements with reduced Gaussian integra-tion (C3D8R in ABAQUS/Explicit [16])were used.Iterations on element size and meshing details were made prior to arriving at the mesh used to carry out the final analysis.The smallest elements at the mid-plane in the vicinity of the crack tip have dimensions 30Â30Â50l m with 50l m in the through-thickness direction.Near the surface of the specimen and near the tip the element dimensions are 30Â30Â80l m.Approximately 100elements extend from the mid-plane to the surface in the vicinity of the crack tip.The 30l m in-plane mesh at the tip allows accurate resolution of the initial tip notch.Further away from the notch tip in the region of crack propagation,the in-plane dimensions of the mesh are approximately 50Â50l m.Relatively small differences in results were found from a series of computations with different meshes with ele-ment dimensions in the range from 30l m to 50l m.The mesh in Fig.5b is regarded as having a nominal (characteristic)size D =50l m.In order to improve computational efficiency,only the material in the region of crack propagation,whichstartsFig.5.(a)Compact tension test geometry employed in the experimental study and (b)corresponding finite element model.Specimen thickness is 12.5mm.Crack mouth opening displacements were measured using a non-contacting extensometer and a pair of fiducial tapes mounted on the specimen edge,separated by a distance of 14mm.The same definition was used in the subsequent finite element calculations.498Z.Xue et al./Engineering Fracture Mechanics 77(2010)492–509Z.Xue et al./Engineering Fracture Mechanics77(2010)492–509499from the notch tip to the left edge of the specimen and has width of7mm,was modeled using the extended Gurson model. Outside this region,the specimen was modeled using von Mises plasticity(i.e.,f0¼0and k x¼0).Load–displacement predictions for four values of f0(including f0¼0)and k x¼2are compared with the experimental results in Fig.6.Over the range plotted,the load of the damage-free specimen increases monotonically with displacementbecause there is no damage-induced softening or crack growth.In contrast,the prediction for f 0¼0:001follows the exper-imental curve closely for displacements as large as 5mm.Furthermore,it predicts that cracking initiates at the center of the notch front,at a displacement of about 1mm.Thereafter,the crack grows deeper into the specimen and spreads laterally from the center (Fig.7).Upon reaching the free surface,at a displacement of 3.6mm,the load reaches a maximum and a load fall-off ensues.These results agree well with the experimental measurements.The predictions for the two larger values of f 0clearly over-predict the effect of damage and cracking at displacements below 5mm.They are particularly deficient in predicting the displacement at the load maximum.At displacements above 5mm,the experimental data fall below the numerical predictions for all three values of f 0.This discrepancy arises for two reasons.The symmetry imposed in the simulation precludes the transition to slant fractures that usually develop as the crack advances and the crack in the test is likely to have departed from the imposed symmetry.In addition,element deletion was used to mimic the crack propagation such that the element is deleted when f ¼f f .As the crack advances,it encounters larger elements in the mesh and these dissipate more energy prior to failure than the cali-brated elements with D =50l m.It is indeed observed from Fig.8for the case of the crack month opening displacement reaching 8mm that some of the deleted elements are much larger than D =50l m.It remains for the future to verify that predictions based on the present choices of f 0and D can replicate the present experimental results for larger displacements using a computational model with no symmetry restrictions,as well as a uniform mesh with the same calibrated element size throughout the region of crack propagation.Unfortunately,this would result in a significant increase in computational size that would not be feasible for the calibration procedure.3Although the results in Fig.6b were computed with k x ¼2,the shear damage coefficient has essentially no effect on these predictions.To illustrate this,results for f 0¼0:001computed with k x =2,2.5and 3are plotted in Fig.6a.The response under-goes only very slight softening with increasing k x but remains well within the range of the experimental data.The weak dependence on k x is consistent with the fact that mode I cracking occurs over the range of load–displacement data used for thefitting.Fig.7.Images of broad face of compact tension specimen with increasing crack mouth opening displacements.Arrows in the right column indicate the emerging near-surface crack.3More than ten days were required for each calculation based on the current mesh using a personal computer with memory requirements up to 1GB.The trade-off between efficiency and accuracy suggests that the present calibration strategy is a reasonable compromise.500Z.Xue et al./Engineering Fracture Mechanics 77(2010)492–509In summary,based on the agreement between prediction and experiment for displacements below5mm,the choicesf0¼0:001with D%50l m are made for DH36.6.Determination of k x from a shear-off testThefixture in Fig.9was designed to create a controlled test in which shear localization gives way to mode II fracture[17].The corresponding load–displacement curve is used to infer the shear damage coefficient,k x.In the test,a plate specimen(3mm thick)is clamped between two thick steel platens,each with a through-hole of diameter19.2mm.Cylindrical steelplungers,19.05mm in diameter,are inserted into each of the two holes,leaving a narrow(0.075mm)radial gap between theplunger surface and the hole.An additional pair of plungers with slightly reduced diameter(to accommodate Teflon bear-ings)is then inserted into the holes.The four plungers and the test specimen are then clamped together with a single boltpassing through open holes in each of three of the plungers and the test specimen and a threaded hole in the last plunger,asshown in Fig.9.With one side of the assembly placed on a stiff supporting base,the plunger on the opposite side is loadaxially in compression.The movement of the plungers induces shear deformation within a narrow cylindrical ring in thespecimen.Failure starts as shear localizations near the upper and lower surfaces of the plate which subsequently developinto mode II cracks as the deformation progresses into the plate.The experimental measurements are summarized in Fig.10.The coordinate axes are the nominal applied shear stress, s P=ð2p RHÞ(R being the plunger radius and H the plate thickness)and the normalized displacement,d=H.The resulting curves exhibit features reminiscent of those obtained in tension tests.That is,the initial linear region gives way to plasticityat a shear stress of r O=2%240MPa(r O being the tensile yield stress,obtained from Fig.3).Following a period of strain hard-ening,the load reaches a peak,at a displacement of d=H%0.3–0.4,and subsequently diminishes with increasing displace-ment.Scanning electron micrographs of a cross-section through a test specimen that had been interrupted followingloading to a displacement d=H%0.5are presented in Fig.11.They reveal a diffuse damage zone within the region of intenseshear as well as well-defined shear cracks emanating from the specimen surface in the vicinity of the plunger periphery.A detail of thefinite element mesh is depicted in the inset of Fig.9a.Based on the prior calibrations,computations ofshear-off employ an initial void fraction f0¼0:001and element size D=50l m in the region of shear localizationandFig.8.Evolution of plastic strain and crack growth fromfinite element calculations of the compact tension test.Z.Xue et al./Engineering Fracture Mechanics77(2010)492–509501。
高二英语数学建模方法单选题20题
高二英语数学建模方法单选题20题1. In the process of mathematical modeling, "parameter" means _____.A. a fixed valueB. a variable valueC. a constant valueD. a random value答案:A。
解析:“parameter”常见释义为“参数”,通常指固定的值,选项 A 符合;选项B“variable value”意为“变量值”;选项C“constant value”指“常数值”;选项D“random value”是“随机值”,在数学建模中“parameter”通常指固定的值。
2. When building a mathematical model, "function" is often used to describe _____.A. a relationship between inputs and outputsB. a set of random numbersC. a single valueD. a group of constants答案:A。
解析:“function”在数学建模中常被用来描述输入和输出之间的关系,选项 A 正确;选项B“a set of random numbers”表示“一组随机数”;选项C“a single value”是“单个值”;选项D“a group of constants”指“一组常数”。
3. In the context of mathematical modeling, "optimization" refers to _____.A. finding the best solutionB. creating a new modelC. changing the parameters randomlyD. ignoring the constraints答案:A。
纹理物体缺陷的视觉检测算法研究--优秀毕业论文

摘 要
在竞争激烈的工业自动化生产过程中,机器视觉对产品质量的把关起着举足 轻重的作用,机器视觉在缺陷检测技术方面的应用也逐渐普遍起来。与常规的检 测技术相比,自动化的视觉检测系统更加经济、快捷、高效与 安全。纹理物体在 工业生产中广泛存在,像用于半导体装配和封装底板和发光二极管,现代 化电子 系统中的印制电路板,以及纺织行业中的布匹和织物等都可认为是含有纹理特征 的物体。本论文主要致力于纹理物体的缺陷检测技术研究,为纹理物体的自动化 检测提供高效而可靠的检测算法。 纹理是描述图像内容的重要特征,纹理分析也已经被成功的应用与纹理分割 和纹理分类当中。本研究提出了一种基于纹理分析技术和参考比较方式的缺陷检 测算法。这种算法能容忍物体变形引起的图像配准误差,对纹理的影响也具有鲁 棒性。本算法旨在为检测出的缺陷区域提供丰富而重要的物理意义,如缺陷区域 的大小、形状、亮度对比度及空间分布等。同时,在参考图像可行的情况下,本 算法可用于同质纹理物体和非同质纹理物体的检测,对非纹理物体 的检测也可取 得不错的效果。 在整个检测过程中,我们采用了可调控金字塔的纹理分析和重构技术。与传 统的小波纹理分析技术不同,我们在小波域中加入处理物体变形和纹理影响的容 忍度控制算法,来实现容忍物体变形和对纹理影响鲁棒的目的。最后可调控金字 塔的重构保证了缺陷区域物理意义恢复的准确性。实验阶段,我们检测了一系列 具有实际应用价值的图像。实验结果表明 本文提出的纹理物体缺陷检测算法具有 高效性和易于实现性。 关键字: 缺陷检测;纹理;物体变形;可调控金字塔;重构
Keywords: defect detection, texture, object distortion, steerable pyramid, reconstruction
II
数学建模:最小二乘拟合实验
《数学建模期末实验作业》院系:数学学院专业:信息与计算科学年级:2014级试题编号:37胡克定律得综合评价分析背景摘要:利用一个打蛋器与一个物理学公式,毁掉一面六英寸厚得承重墙,这么天方夜谭得事您能相信吗?但它却真得发生了!《越狱》这一电视剧相信很多人都耳熟,即使没瞧过里面得内容,但应该都曾经听过它得大名.在《越狱》第一季第六集中,Michael要通过地下管道爬到医务室得下面,但就是一条重要通道就是被封死得,因此必须要把这个封死得墙破坏掉,由于就是混凝土结构,因此破坏起来很难,Michael从纹身上拓下魔鬼得画像,投影在掩住管道入口得墙上,用“胡克定律”计算出最佳位置,再用小巧得打蛋器在承重墙上钻出了几个小洞,最后借助这几个小洞毁掉了这堵承重墙。
相信大多数人都觉得很梦幻很不科学,但事实就就是这样得令人惊讶。
搜狐娱乐曾经报道过,有《越狱》粉丝不相信这一情节,在现实生活中进行实验,结果真得重现了“胡克定律”凿墙这一情节。
胡克定律得表达式为F=k·x或△F=k·Δx,其中k就是常数,就是物体得劲度(倔强)系数。
在国际单位制中,F得单位就是牛,x得单位就是米,它就是形变量(弹性形变),k得单位就是牛/米.倔强系数在数值上等于弹簧伸长(或缩短)单位长度时得弹力。
弹性定律就是胡克最重要得发现之一,也就是力学最重要基本定律之一.在现代,仍然就是物理学得重要基本理论。
胡克得弹性定律指出:弹簧在发生弹性形变时,弹簧得弹力Ff与弹簧得伸长量(或压缩量)x成正比,即F=-k·x.k就是物质得弹性系数,它由材料得性质所决定,负号表示弹簧所产生得弹力与其伸长(或压缩)得方向相反。
但当我们进行多次实验,便会发现随着F得逐步增大,便不再服从胡克定律.为此我们应当运用插值与拟合得内容,探索更加准确得公式。
一、建模问题1、问题提出1、1问题背景弹簧在压力F 得作用下伸长x,一定范围内服从胡克定理:F与x成正比,即F=kx。
模型收敛 英语
模型收敛英语Convergence of ModelsThe concept of model convergence is a fundamental aspect of various fields, ranging from machine learning and data analysis to scientific research and engineering. In this essay, we will explore the significance of model convergence, its underlying principles, and its practical applications across different domains.At the core of model convergence is the idea that a mathematical or computational model should converge to a stable and consistent solution as the input data or parameters are refined or the algorithm is iterated. This convergence is essential for ensuring the reliability and accuracy of the model's predictions or outputs. Without convergence, the model may produce inconsistent or unpredictable results, rendering it unreliable for decision-making or further analysis.One of the primary reasons for the importance of model convergence is the inherent uncertainty and complexity present in real-world systems. These systems often involve a multitude of variables, interactions, and interdependencies that can be challenging to capture accurately in a model. By achievingconvergence, researchers and practitioners can have confidence that their models are accurately representing the underlying phenomena and can be used to make informed decisions or draw meaningful conclusions.In the field of machine learning, model convergence is crucial for the development of effective and reliable algorithms. During the training process, machine learning models iteratively adjust their parameters to minimize the difference between the predicted outputs and the true outputs (known as the loss function). Convergence in this context means that the model has reached a point where the loss function is minimized, and the model's performance on unseen data is optimized. This convergence is essential for ensuring the generalization of the model to new data, which is a fundamental requirement for real-world applications.Similarly, in scientific research, the convergence of computational models is vital for validating the accuracy and reliability of simulations and experiments. Researchers often use mathematical models to represent complex physical, chemical, or biological phenomena, and the convergence of these models is necessary to ensure that the simulations accurately capture the underlying processes. This convergence can be achieved through techniques such as grid refinement, adaptive mesh generation, and iterative solution methods.In engineering, model convergence is crucial for the design and optimization of complex systems. Engineers often use computational models to simulate the behavior of structures, fluid flows, or energy systems, and the convergence of these models is essential for ensuring the reliability and safety of the final product. For example,in the design of aircraft or automobiles, engineers rely on computational fluid dynamics (CFD) models to predict the aerodynamic performance of the vehicle. The convergence of these models is crucial for accurately predicting the drag, lift, and other important parameters that affect the vehicle's performance and efficiency.Beyond these specific applications, model convergence is also relevant in fields such as finance, economics, and social sciences, where mathematical and statistical models are used to analyze and predict complex phenomena. In these domains, the convergence of the models is essential for making informed decisions, assessing risks, and developing effective policies.In conclusion, the concept of model convergence is a fundamental aspect of various fields, from machine learning to scientific research and engineering. By achieving convergence, researchers and practitioners can ensure the reliability and accuracy of their models, leading to more informed decision-making and a betterunderstanding of the underlying systems. As the complexity of real-world problems continues to increase, the importance of model convergence will only grow, making it a crucial area of study and application across a wide range of disciplines.。
如何解决深度学习模型的梯度爆炸问题
如何解决深度学习模型的梯度爆炸问题深度学习模型的梯度爆炸问题是在训练深度神经网络时常见的一种挑战。
梯度爆炸指的是训练过程中模型的梯度值变得非常大,导致权重更新发生不可控的波动,最终影响模型的收敛性和性能。
在本文中,我们将探讨一些解决深度学习模型梯度爆炸问题的常见方法。
首先,我们可以采用梯度剪裁(Gradient Clipping)的方法来解决梯度爆炸的问题。
梯度剪裁是通过限制梯度的范围来防止梯度值过大。
一种简单而有效的做法是设置一个阈值,当梯度超过这个阈值时,将其裁剪至阈值范围内。
这样可以保持梯度在一个可控的范围内,避免梯度爆炸的问题。
其次,我们可以选择适当的激活函数来缓解梯度爆炸。
传统的激活函数,如Sigmoid和Tanh函数,在输入值较大时,函数的导数非常接近于零,从而导致梯度更新时出现衰减现象。
为了解决这个问题,可以选择使用ReLU(Rectified Linear Unit)等函数作为激活函数,因为它在输入大于零时,导数始终为常数1。
这样可以避免梯度在反向传播中消失或爆炸。
另外,使用Batch Normalization也是一种有效的方法来应对梯度爆炸问题。
Batch Normalization是通过对每个小批量的输入进行归一化来缩小输入的范围。
它将每个输入值减去该小批量的均值,并除以该小批量的标准差。
这样可以使模型的输入保持在一个合适的范围内,从而避免梯度爆炸的问题。
另一种常用的方法是使用梯度规范化(Gradient Normalization)技术。
梯度规范化通过对梯度向量进行缩放,使其范数保持在一个合适的范围内。
具体来说,可以使用L2范数对梯度进行归一化处理。
这样可以使梯度的大小保持在一个合适的范围内,避免梯度爆炸的问题。
此外,合适的优化算法也可以帮助解决梯度爆炸的问题。
一种常用的算法是批量随机梯度下降(Batch Stochastic Gradient Descent,BSGD)。
模拟退火算法的约束条件
模拟退火算法的约束条件模拟退火算法(Simulated Annealing)是一种用于优化问题的随机搜索算法,其灵感来源于固体退火的物理过程。
在模拟退火算法中,系统通过一系列的状态转移来寻找全局最优解或近似最优解。
在搜索过程中,模拟退火算法遵循一定的约束条件,以保证搜索结果的有效性和可靠性。
1. 初始解的生成:模拟退火算法对于初始解的生成没有具体的限制,可以使用随机生成、贪心算法等方法。
初始解的质量和多样性会对算法的性能产生影响,因此在实际应用中需要根据具体问题进行调整。
2. 邻域结构的定义:邻域结构是模拟退火算法中的一个关键概念,它定义了当前解的周围的解空间。
在搜索过程中,模拟退火算法通过在邻域内进行随机搜索来寻找更好的解。
邻域结构的定义需要满足以下条件:能够包含当前解的所有可能的变动方案,能够通过改变一个或多个参数来生成新的解。
3. 目标函数的定义:模拟退火算法的目标是在解空间中寻找最优解或近似最优解。
因此,需要明确定义一个目标函数来评估每个解的质量。
目标函数的设计需要考虑问题的具体性质和约束条件,并且应能够准确地反映解的优劣程度。
4. 温度控制策略:模拟退火算法通过温度参数来控制搜索过程中的随机性。
温度越高,搜索过程中的随机性越大,有利于避免陷入局部最优解;温度越低,搜索过程中的随机性越小,有利于稳定解的质量。
温度控制策略需要满足以下条件:初始温度应足够高以保证全局搜索能力,温度下降的速度应适中以平衡全局搜索和局部搜索的性能。
5. 接受准则的定义:模拟退火算法通过接受准则来决定是否接受新的解。
接受准则的定义需要考虑当前解的质量、新解的质量以及温度参数。
一般情况下,接受准则满足Metropolis准则,即如果新解的质量更好,那么接受新解;否则,以一定的概率接受新解,概率与新解的质量差和温度参数有关。
6. 终止条件的设定:模拟退火算法需要设定一个终止条件来结束搜索过程。
终止条件可以是达到一定的迭代次数、达到一定的时间限制、解的质量达到一定的阈值等。
COMSOL使用技巧_V1.0_2013-02
COMSOL使用技巧目录一、几何建模 ................................................................................................................................. - 1 -1.1组合体和装配体 ................................................................................................................. - 1 -1.2隐藏部分几何 ..................................................................................................................... - 2 -1.3工作面 ................................................................................................................................. - 3 -1.4修整导入的几何结构 ......................................................................................................... - 4 -1.5端盖面 ............................................................................................................................... - 11 -1.6虚拟几何 ........................................................................................................................... - 12 -二、网格剖分 ............................................................................................................................... - 14 -2.1交互式网格剖分 ............................................................................................................... - 14 -2.2角细化 ............................................................................................................................... - 16 -2.3自适应网格 ....................................................................................................................... - 16 -2.4自动重新剖分网格 ........................................................................................................... - 18 -三、模型设定 ............................................................................................................................... - 19 -3.1循序渐进地建模 ............................................................................................................... - 19 -3.2开启物理符号 ................................................................................................................... - 19 -3.3利用装配体 ....................................................................................................................... - 21 -3.4调整方程形式 ................................................................................................................... - 22 -3.5修改底层方程 ................................................................................................................... - 23 -四、求解器设定 ........................................................................................................................... - 25 -4.1调整非线性求解器 ........................................................................................................... - 25 -4.2确定瞬态求解的步长 ....................................................................................................... - 26 -4.3停止条件 ........................................................................................................................... - 27 -4.4边求解边绘图 ................................................................................................................... - 28 -4.5绘制探针图 ....................................................................................................................... - 29 -五、弱约束的应用技巧 ............................................................................................................... - 31 -5.1一个边界上多个约束 ....................................................................................................... - 31 -5.2约束总量不变 ................................................................................................................... - 32 -5.3自定义本构方程 ............................................................................................................... - 34 -六、后处理技巧 ........................................................................................................................... - 36 -6.1组合图形 ........................................................................................................................... - 36 -6.2显示内部结果 ................................................................................................................... - 37 -6.3绘制变形图 ....................................................................................................................... - 38 -6.4数据集组合 ....................................................................................................................... - 39 -6.5导出数据 ........................................................................................................................... - 39 -七、函数使用技巧 ....................................................................................................................... - 43 -7.1随机函数 ........................................................................................................................... - 43 -7.2周期性函数 ....................................................................................................................... - 44 -7.3高程函数 ........................................................................................................................... - 45 -7.4内插函数 ........................................................................................................................... - 46 -八、耦合变量的使用技巧 ........................................................................................................... - 48 -8.1积分耦合变量 ................................................................................................................... - 48 -8.2拉伸耦合变量 ................................................................................................................... - 49 -九、ODE的使用技巧 ................................................................................................................... - 50 -9.1模拟不可逆形态变化 ....................................................................................................... - 50 -9.2反向工程约束 ................................................................................................................... - 51 -十、MATLAB实时链接 ................................................................................................................ - 52 -10.1同时打开两种程序GUI ................................................................................................. - 52 -10.2在COMSOL中使用MATLAB脚本................................................................................ - 52 -10.3在MATLAB中编写GUI ................................................................................................. - 53 -10.4常用脚本指令................................................................................................................ - 54 -十一、其他 ................................................................................................................................... - 56 -11.1局部坐标系.................................................................................................................... - 56 -11.2应力集中问题................................................................................................................ - 56 -11.3灵活应用案例库............................................................................................................ - 57 -11.4经常看看在线帮助........................................................................................................ - 57 -11.5临时文件........................................................................................................................ - 58 -11.6物理场开发器................................................................................................................ - 59 -一、几何建模COMSOL Multiphysics提供丰富的工具,供用户在图形化界面中构建自己的几何模型,例如1D中通过点、线,2D中可以通过点、线、矩形、圆/椭圆、贝塞尔曲线等,3D中通过球/椭球、立方体、台、点、线等构建几何结构,另外,通过镜像、复制、移动、比例缩放等工具对几何对象进行高级操作,还可以通过布尔运算方式进行几何结构之间的切割、粘合等操作。
图的赋权边覆盖问题的模拟退火算法

第 4期
董星奎等 : 图的赋权边覆盖问题的模拟退火算法
11 5
Se2 若 在 该温 度达 到 内循 环 停止 条件 , tp 则转 到 Se3否 则 , 邻域 N()中随 机选 一 个 , 算 tp ; 从 计
一
3 4 接 受概 率和 产生 概率 . 在 给定 的解 空 间 中 , 拟退 火 过 程从 一 可行 解 模 到 另一 可行解 不 断 随机 游 动 , 一 随机 过程 可 以用 这
索算 法 的扩展 , 不 同 于局 部 搜 索 之 处是 依 一定 的 它 概 率选 择领域 中费 用 值 大 的 状态 , 允许 目标 函 数 它
1 问题 的描 述
设 G( E V, )为 图 , 中 : 为点 集 合 ; 其 V E为 边 集 合 ; 一 { , , , )E一 {1P, , )若 存在 V 1 … , e,2… .
一 =
式 中 : 图 G( E B是 V, )的边 ; 是 图 的总边数 ; l I E
是 图 G( V 的 一个 边覆 盖
赋权 边覆 盖 问题 的模 型 可描述 为
( 始湿 序) 初 .
收 稿 日期 :0 9 1 1 20 —1 0
作者简 介: 董星奎 (9 3)男 , 1 8 一, 甘肃陇南人 , 硕士生
∈ F
E 的 寻找∑W 最 边 权. 小的 覆盖E 的 题叫 赋 问 做
∈
权边 覆 盖问题 .
最 小边覆 盖 问题 的模 型可 描述 为
; El
~ j j i j: “ / . 一 — i
蚕
i. . 0 F 一
一
数的过程中跳 出误差益面 局部极小点 逞尖过 程
本 文主要 针对 赋权 图 的边覆 盖 问题 进行 研 究 , 求 寻
慢性病的审批流程
慢性病的审批流程It is no secret that the approval process for chronic diseases can be a frustrating and time-consuming experience for many individuals. 慢性病的审批流程经常让人感到沮丧和耗时。
From the initial diagnosis to getting the necessary treatments and medication, the entire process can be overwhelming and stressful. 从最初的诊断到获得必要的治疗和药物,整个流程可能会让人感到不堪重负和压力重重。
This is largely due to the various requirements and steps that one must go through, as well as the bureaucracy and red tape that often accompany it. 这在很大程度上是由于一个人必须经历的各种要求和步骤,以及常伴随其中的官僚主义和繁文缛节。
One of the primary challenges with the approval process for chronic diseases is the extensive documentation and evidence required to support the need for treatment. 慢性病审批流程的主要挑战之一是需要大量的文件和证据来支持治疗的必要性。
This can include medical records, test results, physician notes, and other forms of documentation that demonstrate the severity and impact of the disease on the individual's life. 这可能包括医疗记录、检测结果、医生笔记和其他形式的文件,这些文件显示了疾病对个人生活的严重性和影响。
双塔模型 损失函数

双塔模型损失函数
双塔模型是一种常见的推荐算法模型,它通过比较两个物品或用户的特征向量来预测它们之间的关系,例如相似度、匹配度等。
在双塔模型中,损失函数是优化模型的重要指标之一,它反映了模型预测结果与实际结果之间的差异程度。
本文将介绍双塔模型中常用的损失函数及其特点。
1. 余弦相似度损失函数
余弦相似度损失函数是一种常见的双塔模型损失函数,它通过计算两个物品或用户的特征向量之间的余弦相似度来衡量它们之间的相似程度。
当预测结果越接近实际结果时,损失函数值越小。
余弦相似度损失函数具有计算简单、收敛速度快等特点,但对特征向量的长度敏感,需要对特征向量进行归一化处理。
2. 交叉熵损失函数
交叉熵损失函数是一种常见的分类问题损失函数,它在双塔模型中用于预测物品或用户之间的匹配度。
交叉熵损失函数通过计算预测结果与实际结果之间的差异来优化模型。
交叉熵损失函数具有对异常值不敏感、训练效果稳定等特点,但在样本分类不平衡时容易导致模型偏离。
3. 对比损失函数
对比损失函数是一种用于度量物品或用户之间相似度的损失函数,它通过比较同一类别内的相似度和不同类别之间的相似度来确定损失函数。
对比损失函数具有对特征向量长度不敏感、对样本不平衡
具有较好的适应性等特点,但训练时间较长,计算复杂度高。
综上所述,不同的损失函数在双塔模型中具有不同的应用场景和特点,选择合适的损失函数能够提高模型的预测准确率和泛化能力。
荷载-环境耦合作用下结构裂缝模拟综述
荷载-环境耦合作用下结构裂缝模拟综述发表时间:2018-07-09T11:33:20.187Z 来源:《基层建设》2018年第12期作者:吴强强[导读] 摘要:对在役钢筋混凝土桥梁进行分析,需要考虑荷载-环境的耦合作用。
浙江交工集团股份有限公司浙江杭州 310051摘要:对在役钢筋混凝土桥梁进行分析,需要考虑荷载-环境的耦合作用。
荷载-环境耦合作用下,对结构刚度下降的分析,除了需要考虑钢筋锈蚀外,还需要结构裂缝的萌生和扩展进行分析。
采用断裂力学模型只能对已有或者预设的裂缝进行扩展计算。
但在实际结构中,裂缝并非预设,需要对裂缝萌生位置进行判断。
关键字:在役钢筋混凝土桥梁;荷载-环境耦合作用;钢筋锈蚀;裂缝1 引言桥梁是交通设施的重要组成部分,随着中国经济的飞速发展,国家对基础设施的建设投入必然会越来越大,新桥在不断建设中,新老桥梁同时存在,出现了桥龄分布较广的现象。
老桥在环境和荷载的耦合作用下出现大量裂缝导致正常使用状态或承载能力极限状态不再满足要求等原因。
对在役钢筋混凝土桥梁进行分析时,需要对荷载-环境的耦合作用下钢筋混凝土结构裂缝萌生和发展进行综合研究。
2 荷载-环境耦合作用下结构裂缝模拟2.1 钢筋混凝土结构裂缝模型荷载-环境耦合作用下,除了钢筋锈蚀导致钢筋本身直径减小以及钢筋-混凝土界面粘结性能下降带来的结构刚度减小外,裂缝的萌生和扩展也会使结构的刚度减小。
目前,在有限元计算中常用的裂缝模型主要有分离裂缝模型(Discrete crack model),弥散裂缝模型(Smeared crack model)以及断裂力学模型(Fracture mechanics model)[1]。
近年来,随着断裂力学的发展,断裂力学裂缝模型研究较多,虚拟裂缝模型(Fictitious crack model)[2]和钝带裂缝模型(Crack band model)[3]分别是其中的代表。
Ingraffea A R等[4]通过对裂缝尖端附近网格重划分的方法,在传统有限元中采用分离式裂缝模型对裂缝的扩展进行了模拟。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
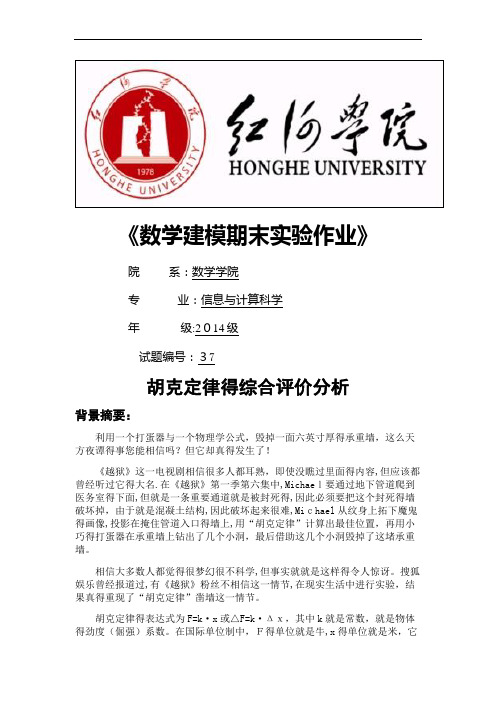
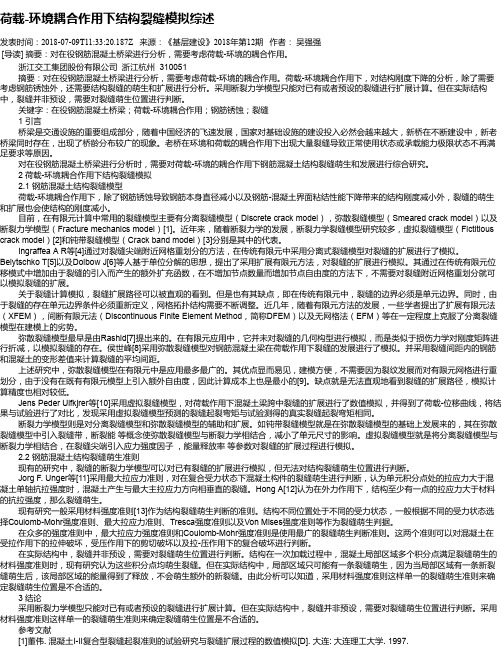
Procedural Modeling of Cracks and FracturesAur´e lien MartinetEric GalinBrett DesbenoitSamir AkkoucheArtis-GRA VIR INRIA Rhˆo ne AlpesLIRIS CNRS UCB Lyon1Figure 1.A scotch glass,a statue and a flute glass broken into,andfragments respectivelyAbstractThis paper presents a procedural method for modelingcracks and fractures in solid materials such as glass,metal and stone.Existing physically based techniques are com-putationally demanding and lack control over crack and fracture propagation.Our procedural approach provides the designer with simple tools to control the pattern of the cracks and the size and shape of fragments.Given a few parameters,our method automatically creates a vast range of types of cracks and fragments of different shapes.Keywords:Procedural modeling,fractures,cracks.1.IntroductionRealistic animation of breaking objects is a challenging task in computer animation.Breaking an object often cre-ates many small and interlocking pieces.The complexity of those fragments makes modeling by hand impossible.Con-sequently,the simulation of cracking,breaking and shatter-ing has received some attention in the computer graphics community.Most existing techniques rely on involved and compu-tationally demanding physically based simulations to com-pute crack propagation and fragments [10,6,9,2].Such methods are indispensable for correct and accurate simula-tion of shattering and breaking and have produced imagesof striking realism.Specific techniques have been devel-oped for simulating objects shattering induced by explo-sions [5,6].Other methods model static crack patterns on dry mud [4],and ceramics [3].Physically based simulations often require the discretiza-tion of objects into voxels or tetrahedral meshes to compute internal forces.The discretization often leads to some arte-facts in the crack patterns which makes fragments look not very realistic.Artefacts are the more visible as fractures are propagated along the boundaries of the initial mesh or voxel grid.Simulations are difficult to control,therefore their us-age may be cumbersome for some applications and more simplistic,albeit less accurate,approaches may be useful.This paper proposes an original procedural method for creating cracks and breaking objects into fragments.Our approach enables the designer to control the regions where cracks or fractures propagate and the shape of generated fragments.Our crack and fracture modeling system relies on the Hybrid Tree model [1]that combines skeletal implicit surfaces and triangle meshes in a constructive tree.Cracks and fragments are defined using incremental Boolean oper-ations between the original model and carving volumes or fracture masks.Because the objects need not be voxelized or tetrahedralized as for physically based techniques,we are not limited in resolution when creating fragments and our method can create small thin shards easily.Our algorithm is simple and efficient,allowing the designer to break an object interactively.12Modeling cracksThe creation of cracks on the surface of an object is per-formed in three steps(Figure2).First,the designer defines a two dimensional crack pattern in a specific graph editor. Then,the graph is mapped onto the surface of the original object to create a geometric skeleton.The carving volume is defined by sweeping a profile curve along this skeleton,and cracks are created by using Boolean difference operations between the original input model and carving volume.Figure2.Simulation cycle of the cracking process Crack pattern In our system,cracks are designed after images using a specific editor to obtain realistic patterns. Cracks are characterized by a graph that defines both its branching features and its geometry.The nodes of the graph hold information about the width and the depth of the crack at the corresponding vertex,as well as the directions and the angles between junctions.The edges of the graph include information about the length of the crack.The width and depth along an edge of the graph are defined as a linear in-terpolation of the values at the corresponding nodes so as to create cracks of varying thickness and depth.Therefore,the graph implements the paths followed by a turtle in a plane.Mapping The designer simply needs to project one point of the graph onto the surface of the original object.The whole graph is then automatically transformed into a three dimensional skeleton derived from the turtle geometry rep-resentation[7]by applying a surface marching algorithm, using the relative directions and length from the data stored at the nodes and edges of the graph.The turtle may generate a self-intersecting skeleton.In practice,this occurs only if large crack patterns are applied in regions of high curvature.Nevertheless,the carving vol-ume generation process described in the next paragraphs still creates consistent objects.Volume generation The carving volume is defined by sweeping a vee-shaped profile curve parameterized by the width and depth of the crack along the line segments of the skeleton.In our modeling system,carving volume are char-acterized as the union of prism,tetrahedral and pyramidal implicit primitives(Figure3).Figure3.Carving volume generated by a line seg-ment of the crack skeletonThe vertices of the carving volume for every line seg-ment of the skeleton are computed as follows.Let denotea vertex of the skeleton and and denote the width anddepth of the crack at vertex respectively.Wefirst com-pute the normal of the implicit surface at vertex as well as the tangent vector to the skeleton,denoted as,and respectively.The bottom vertex is defined as, whereas the border,denoted as and are computed as .Eventually,vertices and are raised above the surface by a user controlled offset distance to avoid artefacts in convex regions of high curvature.Vase (1.36)ImageBottle (2.48)Amphora (2.13)Figure4.A real clay vase(upper left)and some syn-thetic models created after the original imageResults Figure4shows a comparison between a real bro-ken vase made of clay,and some synthetic model created with our method.The paths of the cracks on the synthetic models were created after the original image.The depth of the cracks adapted to the thickness of the original model au-tomatically so that cracks should pierce the model and not only create surface scratches.Reported timings(in seconds) include the mapping of the crack pattern and the volume generation process.23Modeling fracturesA simulation starts with the selection of a fracturing tool that is characterized by a fracture mask defining the cut-ting profile.The fracturing tool is applied to the object to break it into two fragments by computing the Booleanintersection and difference between the orig-inal object and fracture mask.The fragments are expressed as Hybrid Trees and can be further broken into pieces by repetitively applying the selected tool(Figure5).Figure5.Simulation cycle of our fracturing systemWhen the simulation is completed,all the fragments are fully characterized by a Hybrid Tree which may be polygo-nized for fast visualization.Mechanical characteristics such as their mass,volume,inertia tensors may be computed eas-ily to create physically based animation.Fracture masks Fracture masks are solids that define the profile of the fracture between two fragments.The fracture masks are positioned relatively to the original objects so that it should embed part of it and cut it into parts.Fracture masks no only characterize the overall large scale pattern of the crack between two fragments,but also the small de-tails which make the crack surface rough or smooth.Simple skeletal implicit primitives such as ellipsoids,boxes or half spheres create fragments with straight and smooth cut pat-terns.Our system also implements heightfield primitives to create more complex fracture profiles.Those primitives enable the designer to reproduce realistic surface charac-teristics in terms of profile and roughness after real world examples.Fracture regions In our system,the designer controls the regions where fractures will occur by constraining fractures to a limited volume.Given a volumetric region denoted as ,fractures will be performed on the Hybrid Tree defined as the intersection whereas the difference will be preserved and kept crack-free.As for fracture masks,simple smooth and regular vol-umes such as spheres or boxes create smooth and straight cut patterns that do not look very realistic.Therefore,we have implemented a variety of template bumped and noisy regions that create more realistic fracture patterns.In our system,those volumes are defined by randomly perturbingthe locations of the vertices mesh of spheres and ellipsoids along their vertex normal using a noise function.Controlling the shape of fragments An original object may be broken interactively by editing the position and ori-entation of the fracture masks in space to control the shape of the fragments.While this approach provides the designer with a tight,although low level,control over the shape of thefinal broken object,it is cumbersome and inefficient for modeling an object shattering into hundreds of pieces.To overcome this problem,we have developed an algo-rithm that automatically breaks an object into a set of frag-ments whose size and shape are controlled by the designer.The simulation is controlled by two main parameters.The volume ratio between two fragments,denoted as,char-acterizes the distribution of the size of the fragments.The relative shape of fragments is defined by a parameter de-noted as that defines whether fragments should be long thin shards or roughly round pieces.Indeed,represents the angle between the main direction of an object and the normal of the main direction of the cutting tool.Therefore, the designer can select the orientation of the fracture masks relatively to the principal axes of the original object,which enables him to control the global shape of the generated fragments(Figure6).∆Figure6.Controlling the shape of fragments by se-lecting the orientation of the fracture mask relativelyto the principal axis of the shapeAt every step of the algorithm,we select the location and orientation of the fracture mask randomly.Then,given an initial object and a fracture mask,we automatically adjust the position and orientation of the mask so that the size and shape of the generated fragments andshould conform to the parameters and prescribed by the designer(Figure6).This algorithm requires the evaluation of the volume of the fragments as well as the computation of their main di-rections.The original object isfirst converted into a point cloud representation.This process is performed once and for all as a pre-processing step.We adaptively sample the object using an octree decomposition of space.Cells that are detected outside the object are skipped.If a cell is de-tected inside the object,as many points as needed are cre-3ated depending on the level of the octree.Straddling cells are further subdivided until the maximum octree depth is reached.The volume of the object is proportional to the total num-ber of points,denoted as.We simply classify points in-side or outside the mask to compute the volume of the frag-ments.Let denote the number of points detected inside, the volumes are and. This classification is performed efficiently by evaluating the field function value for all the points in the point cloud rep-resentation.The point cloud representation is also used to compute the principal axes of the object using the Karhunen-Loeve transformation.The principal axes of the point cloud are found by choosing the origin at the centre of gravity and forming the dispersion matrix computed as follows:Pieces Break48 5.9618 5.1112856.37Table1.Timings(in seconds)for generating the bro-ken models in Figure1The volume ratio between fragments of the scotch glass was constrained to so as to get pieces of the same vol-ume.The orientation of the cut was computed randomly in to produce some long thin fragments.The cham-pagneflute glass was broken using a volume ratio of to produce fragments of roughly the same size,and the prin-cipal cutting direction was automatically set orthogonal to the principal direction of the fragments so as to avoid long thin pieces.4ConclusionWe have presented an efficient procedural approach for modeling cracks and fractures in solid materials.The de-signer can control the pattern of the cracks and the size and shape of fragments easily.Objects shattering into many in-terlocking fragments may be generated automatically.In the near future,we plan to investigate the creation of fracture masks and crack patterns with different levels of detail to generate fractured models at different resolutions.We also plan to automatically generate textures from the geometry of the cracks to create realistic textures that will be used for display at a low level of details.References[1]R.All`e gre,A.Barbier,S.Akkouche and E.Galin.AHybrid Shape Representation for Freeform Modeling.Shape Modeling International,2004.[2]B.Cutler,J.Dorsey,L.McMillan,M.Mˆu ller andR.Jagnow.A Procedural Approach to AuthoringSolid Models.SIGGRAPH2002Proceedings,302–311,2002.[3]S.Gobron and N.Chiba.Crack pattern simulationbased on3D surface cellular automata.The VisualComputer,17(5),287–309,2001.[4]K.Hirota,Y.Tanoue and T.Kaneko.Simulationof three-dimensional cracks.The Visual Computer,16(7),371–378,2000.[5]O.Mazarak,C.Martins and J.Amanatides.AnimatingExploding Objects.Graphics Interface Proceedings,211–218,1999.[6]M.Mˆu ller,L.McMillan,J.Dorsey and R.Jagnow.Real-Time Simulation of Deformation and Fracture ofStiff Materials.Eurographics Workshop on Animationand Simulation,113–124,2001.[7]L.Mundermann,P.MacMurchy,J.Pivovarov andP.Prusinkiewicz.Modeling Lobed puterGraphics International Proceedings,2003.[8]M.Neff and E.Fiume.A visual model for blast wavesand fracture.Graphics Interface Proceedings,193–202,1999.[9]J.O’Brien, A.Bargteil and J.Hodgins.Graphicalmodeling and animation of ductile fracture.ACMTransactions on Graphics,21(3),291–294,July2002.[10]J.Smith,A.Witkin and D.Baraff.Fast and Control-lable Simulation of the Shattering of Brittle Objects.Graphics Interface Proceedings,27–34,2000.4。