基于粒子群优化的同步风力发电机励磁系统的变论域模糊控制
基于遗传算法的同步发电机模糊PID励磁控制器研究

2 同步发电机自动励磁控制系统I I
关键词 : 遗传算法 模糊控制 PD I 控制 励磁控制
Ab t a t s r c :De e o i g fo a c n e to a I v l p n r m o v n i n lP D
同步发电机 自动励磁控制系统有 以下部分组 成: 同步发电机、 励磁调节器、 电压测量 比较单元、 综合放大单元、 功率单元等 。 各部分传递函数为: 发 电机 : G = G (): o = K
( E, E 和 比例 因子( u 、 u、u ) K K C) K p K i d 的大 小 , K 最
c n r l Ex i to o t l o to l ct inc nr a o
其 中: 一发 电机放大系数; ‰
d 时 间常 数 。 0 一
电 压测量比较单元: R ) 而 R G( = K
其 中: 凰一 电压测量 比较单元放大倍数; 时 间 常数 。
一
l 引言
维普资讯
粥
理 论与 设计
数如 图2 图3 示 。 和 所
参 数 KPKIK 的变 化 量△ pA 、 K 。 、 、D K 、 Ki d它首 先进 A
行模糊化计算 , 然后按模糊控制规则进行逻辑推 理和判决, 得到输 出变量△ 、 K、 。 Ai 本文采用 遗传算法优化的可调因子的模糊PD励磁控制器 I 结构 图见 图1 是根 据E , 和EC来调 整量化 因子
了 良好 控 制 效 果 。 随 着 电 力 系 统 的 发 展 , 统 但 传 PD励 磁 控制 器 己不 能满 足 要求 。 I
功率单元 : z ) G( = 其 中: _功率单元放大倍数 ;
死一 时 间常数 。
变论域模糊PID控制在直流电机中的应用
变论域模糊PID控制在直流电机中的应用随着科技的不断进步,直流电机在工业生产中的应用越来越广泛。
然而,直流电机在运行过程中存在着许多问题,如速度波动、负载变化等。
为了解决这些问题,控制算法也在不断改进和完善。
其中,变论域模糊PID控制被广泛应用于直流电机控制系统中,以提高系统的稳定性和性能。
变论域模糊PID控制是一种基于模糊逻辑的控制算法,它能够根据实时的系统状态调整控制器的参数,从而实现对系统的精确控制。
与传统的PID控制相比,变论域模糊PID控制具有更好的鲁棒性和自适应性。
在直流电机控制中,变论域模糊PID控制可以通过模糊推理和模糊规则来实现系统的自适应调节。
首先,通过采集电机的速度、电流和位置等参数,建立模糊控制器的输入输出关系。
然后,利用模糊规则和模糊推理来对控制器进行优化,使其能够根据实时的系统状态调整参数,从而实现对电机的精确控制。
变论域模糊PID控制在直流电机中的应用有以下几个优点。
首先,它具有良好的鲁棒性,能够有效抵抗外界干扰和系统参数变化带来的影响。
其次,它能够根据实时的系统状态调整参数,实现对电机的自适应控制,提高系统的稳定性和性能。
此外,它还能够减少系统的震荡和超调现象,提高系统的响应速度和精度。
然而,变论域模糊PID控制也存在一些问题。
首先,模糊控制的设计和参数调整相对较为复杂,需要较高的专业知识和经验。
其次,模糊控制器的规则库和模糊推理需要大量的计算资源和存储空间。
此外,模糊控制器的性能很大程度上取决于模糊规则的设计和参数的选择,需要进行大量的试验和优化。
综上所述,变论域模糊PID控制在直流电机中的应用能够有效提高系统的稳定性和性能。
然而,它的设计和参数调整需要一定的专业知识和经验。
今后,我们需要进一步研究和优化变论域模糊PID控制算法,以适应不同的工业应用场景,并解决其存在的问题,推动直流电机控制技术的发展。
变论域模糊控制算法研究

展望未来,永磁同步电机变论域自适应模糊PID控制方法还有许多值得深入研 究的方向。例如,如何进一步提高该方法的响应速度和鲁棒性,以及如何将其 应用于更为复杂的电机控制问题,都是值得深入探讨的课题。此外,随着人工 智能和机器学习技术的快速发展,可以尝试将新型的智能算法引入到永磁同步 电机的控制中,以实现更为高效和精准的控制。
通过分析实验数据和结果,我们可以得出以下结论:永磁同步电机变论域自适 应模糊PID控制方法相比传统PID控制方法具有更高的性能和适应性。在复杂 的运行环境和负载变化下,该方法可以更好地调整PID控制器的参数,实现更 为精准的速度控制。同时,模糊逻辑和自适应算法的引入,使得控制系统具有 了更好的自适应性,为永磁同步电机的广泛应用提供了强有力的支持。
变论域自适应模糊控制器通过将输入空间划分为不同的论域,并动态地调整每 个论域的模糊集合,以适应不同输入范围的变化。它利用模糊逻辑的原理,将 输入值映射到相应的论域,并根据论域内的模糊规则进行推理,得出相应的控 制输出。同时,控制器还通过自适应算法不断调整模糊集合的形状和大小,以 适应系统特性的变化。
参考内容二
随着现代工业技术的飞速发展,永磁同步电机(PMSM)作为一种高效的电机驱 动系统,在许多关键领域都得到了广泛应用。为了满足复杂多变的运行环境和 严格的动态性能要求,研究更为先进的控制策略势在必行。本次演示将探讨永 磁同步电机变论域自适应模糊PID控制的相关问题,旨在为提高电机驱动系统 的性能和适应性提供新的思路。
展望未来,变论域模糊控制算法将在更多领域得到应用和发展。结合、神经网 络等先进技术,变论域模糊控制算法将不断得到优化和提升,更好地服务于工 业自动化、智能制造等领域的控制系统。加强变论域模糊控制算法与物联网、 大数据等技术的融合应用研究,也将为推动工业4.0和中国智能制造的发展提 供有力支持。
基于模糊免疫PID控制的发电机励磁控制器的优化研究
c on t r ol l e r .The r e s u l t s s h o we d t ha t t h e c o n t r o l pe r f o r ma n c e o f f uz z y i mmu ne PI D c o n t r o l l e r wa s
Abs t r a e t I n t r o d uc t i o n wa s ma d e t o t h e s t r u c t ur e of S y nc h r o n o u s g e ne r a t o r e x c i t a t i o n s ys t e m. c o n t r a p o s e t h e s h o r t c o mi n gs o f t h e t r a d i t i o na l PI D c o n t r o l l e r ,a PI D f u z z y i mmu n e c o nt r o l l e r wa s pr e s e n t e d w i t h t h e c o mb i n a t i o n of f u z z y c o nt r o 1 a n d i mmu n e f e e d b a c k m e c h a n i s m w i t h t he c o n v e nt i o n P I D c o n t r o 1 . Vi a a s i m ul a t i o n mo d e l i n M ATLA B/ S i mu l i n k e nv i r o n me n t .e mu l a t i o n wa s i mpl e me n t e d i n t h r e e wa ys :PI D c o n t r o l l e r 、f u z z y a d a p t i v e PI D c o n t r o l l e r a n d f uz z y i mmu n e PI D
基于粒子群优化模糊控制器永磁同步电机控制

科技资讯 SCIENCE & TECHNOLOGY INFORMATION
33
科 技资讯 2019 NO.13 SCIENCE & TECHNOLOGY INFORMATION
动力与电气工程
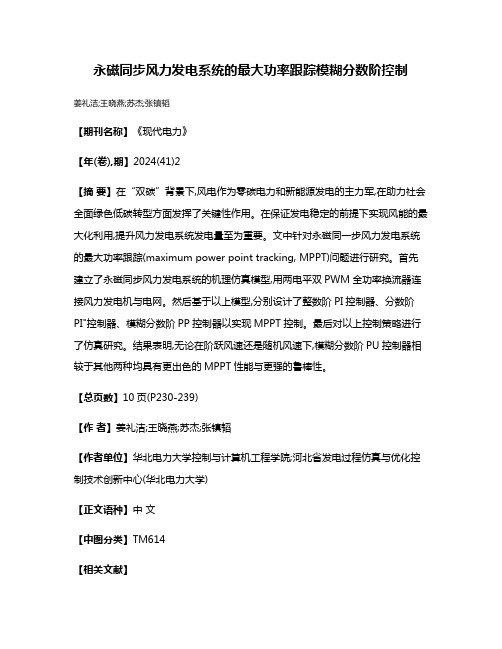
图1 粒子群优化自适应模糊控制器的结构
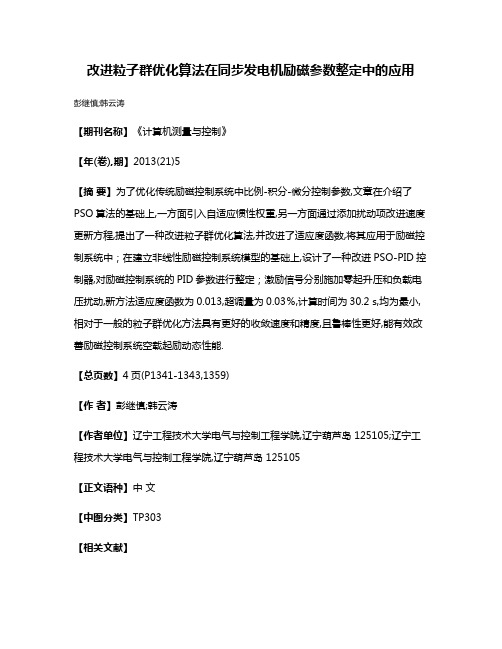
图2 粒子群优化模糊闭环矢量控制仿真模型 从2nm升到10nm,比较不同结果表明,当转速达到稳定状态 时,仅低于指令值。在999r/s产生的误差较小,而且PFC控制 器依然要比PID控制器的性能好。通过数据我们发现转矩 曲线比较平滑,启动过程中只有较大的超调量。这主要是由 于电机带负荷启动过程中需要较大的扭矩,不适合更精确 控制扭矩的场合。在今后的控制策略中引入转矩控制,可以 减小起动转矩的过冲。
1 粒子群的优化算法 该 算 法目前已经在 很 多领域中实 现了应 用。首先 对一
组随机粒子进行初始化,用迭代法求出最优解。在迭代过 程中,粒子 通 过 跟 踪极值 来更 新数 据,其中一 个是 粒子本 身的最优解,即单个极值。而另外一个是整个种群中的最 优解,我们将其称为是全局机制。经过及时寻找到两个值 后,可以根据公式来更新速度和位置。
摘 要:在此次研究中,提出了永磁同步电机控制策略,借助粒子群算法的途径,对模糊控制器的3个比例因子参数进行实
时优化设计,从而充分发挥 其性能和作用,为验 证 这一方法是否具有有效性 进行了仿真 模型验 证,结果 发现该系统具有
较强的鲁棒性,能够实现跟踪负载变化,响应较快,而且准确度高,进一步说明粒子群优化方法在电动机中车有一定的可
3 仿真模型实验 图2为粒子群优化模糊闭环矢量控制仿真模型。 在速度环中,速度为1000r/s,反馈引起的速度误差被发
送到PSO。当模糊控制器的3个参数进行优化,输出U作为电 流指令进入电流回路时,PWM产生方式为空间矢量PWM, 输出的三相正弦电流驱动电机。采用了ID等于零的控制系 统策略。在实验过程中,我们对常规PID控制器和PFC控制 器系统进行仿真实验。其中负载转矩需要从2nm升至10nm, 观察各变量,对于越级信号的响应情况。我们将转速定为 100r/s,分别比较两种控制下转速响应情况。结果发现无论 响应速度为多少,和超调量大小,其PFC控制器都优于PID 控制器的响应速度。同时发现PFC控制器下转距当发生突 变时,速度相对平稳,超调量小。为了测试粒子群优化控制 系统的高速性能,我们将对其进行加速,调至1000r/s,转矩
基于变论域模糊控制的VSG自适应控制策略
基于变论域模糊控制的VSG自适应控制策略自适应控制是指系统能够根据外部环境的变化自动调整控制参数,以保持系统的稳定性和性能。
在电力系统中,由于复杂的变动性和不确定性,自适应控制策略对于保持系统的运行状态至关重要。
基于变论域模糊控制的VSG自适应控制策略是一种有效的控制方法,它结合了变论域控制和模糊控制的优点,能够在应对系统动态变化时实现精确的控制。
一、VSG简介VSG(Virtual Synchronous Generator)是一种基于逆变器的虚拟同步发电机,它模拟了传统的同步发电机的行为。
通过控制逆变器的输出,VSG能够提供与电网同步的有效功率注入,实现对电力系统的稳定控制。
二、变论域模糊控制变论域控制是指根据系统状态的变化,调整控制参数的范围。
在VSG控制中,由于电力系统的动态变化,控制参数的范围需要根据实际情况进行调整。
变论域模糊控制是将模糊控制与变论域控制相结合的一种控制策略。
通过模糊控制器自适应调整控制参数的范围,可以实现对变动环境的精确控制。
三、基于变论域模糊控制的VSG自适应控制策略基于变论域模糊控制的VSG自适应控制策略主要包括以下几个步骤:1. 系统建模与参数估计:首先需要对VSG系统进行建模,并对系统的参数进行估计。
通过测量系统的输入输出数据,可以利用系统辨识方法得到较为准确的系统模型和参数。
2. 变论域参数设计:在VSG自适应控制中,参数的范围需要根据系统状态进行调整。
通过定义合适的变论域函数和参数变化规律,可以实现参数的自适应调整。
3. 模糊控制器设计:利用模糊推理机制,设计一个适应系统状态变化的模糊控制器。
该控制器能够根据系统状态的变化,自动调整控制参数的范围,实现精确的控制。
4. 控制策略实施:将设计好的模糊控制器与VSG系统进行整合,并实施控制策略。
通过实时监测系统的状态,控制器能够根据变论域参数的变化,调整控制策略,以保持系统的稳定性和性能。
四、实例分析为了验证基于变论域模糊控制的VSG自适应控制策略的有效性,我们对一个模拟的电力系统进行实例分析。
风力发电机转子磁悬浮系统的模糊自适应PID控制

风力发电机转子磁悬浮系统的模糊自适应PID控制摘要:针对风力发电机转子磁悬浮系统开环不稳定、强烈非线性等特性,采用传统PID控制很难取得理想效果。
本文基于模糊理论,采用模糊自整定PID 控制算法,MATLAB仿真表明此控制方法比常规PID控制,有更好的稳定性、更高的控制精度。
关键字:风力发电机,模糊PID,MATLAB0 引言随着我国经济的快速发展,对能源的需求越来越强烈,而在能源日趋紧张的今天,新能源成为很多国家研究的热点问题,其中最有代表性的两种新能源:风能、太阳能。
相对于太阳能来说,风能的成本优势明显。
风力发电机具有技术简单,适应能力强,可以家用等诸多优点。
但是传统的风力发电机机械轴承之间的阻力过大,在微风时无法启动。
如果将先进的磁悬浮技术与风力发电机融合,辅以灵活的控制算法,将大大提高其风能利用率和环境适应能力并且有效地降低成本[1]。
然而,磁悬浮系统的非线性成为其发展和应用的瓶颈。
传统的PID控制原理简单,使用方便,适应性强。
但是对风力发电机转子这样系统多变的过程,PID 控制就无法有效地对系统进行在线控制,不能满足在系统参数发生变化时PID 参数随之发生相应改变的要求,严重的影响了控制效果。
本文介绍了基于风力发电机转子磁悬浮系统的模糊自适应PID控制方法,它不需要被控对象精确的数学模型,能够有效地消除系统参数不确定性对控制系统的影响,使控制器灵活地适应被控对象参数的变化。
仿真结果表明该控制系统有较好的控制效果。
1 传统PID与模糊PID的比较1.1 PID控制PID 控制:根据给定值与实际输出值构成控制偏差,将偏差的比例、积分和微分通过线性组合构成控制器,对被控对象进行控制。
PID 在时域的输入输出关系由式(1)表示:(1)标准的PID 调节器如图1。
图1 PID控制器标准的PID调节器传递函数:(2)比例系数主要影响系统的响应速度。
增大比例系数,可以提高系统的响应速度,但过大,则会导致超调,甚至可能带来系统的不稳定。
基于粒子群算法双馈风力发电系统PI参数优化
基于粒子群算法双馈风力发电系统PI参数优化
杨林立;张萍
【期刊名称】《微计算机信息》
【年(卷),期】2010(026)031
【摘要】文中通过建立双馈风力发电系统各个部分的数学模型,从而建立了双馈风力发电系统的矩阵方程,通过求出其雅克比矩阵特征值的实部λi并以λi的最大值作为适应度函数,利用粒子群优化(PSO)算法对其进行系统PI参数的优化.在风速突变条件下对PI参数优化前后双馈风力发电系统进行仿真对比,仿真结果表明利用PSO 优化算法的PI控制规律能有效改善双馈风力发电系统过渡过程的动态性能.
【总页数】3页(P154-155,203)
【作者】杨林立;张萍
【作者单位】610031,四川成都,西南交通大学电气工程学院;230000,安徽合肥,安徽水利水电职业技术学院机电系
【正文语种】中文
【中图分类】TM46
【相关文献】
1.基于粒子群算法的风电系统机侧PI控制器参数自整定 [J], 郑亮; 张细政; 刘志华; 舒聪慧; 卢张宇
2.基于改进粒子群算法的电池储能系统多控制器参数优化 [J], 夏川淋;史林军;史江峰;朱昊卿
3.基于改进粒子群算法的电池储能系统多控制器参数优化 [J], 夏川淋;史林军;史
江峰;朱昊卿
4.基于改进粒子群算法的水轮机调节系统分数阶PIλDμ控制器设计 [J], 曹春建;张德虎;刘莹莹;杨晓春;胡飞
5.基于自适应粒子群算法的直流输电PI控制器参数优化 [J], 胡江;魏星
因版权原因,仅展示原文概要,查看原文内容请购买。
基于改进粒子群优化的主动磁悬浮轴承模糊PID控制
2 0 1 6  ̄ 3 2 期l 科技创新与应用
基 于改进 粒子 群优 化 的主 动磁 悬 浮 轴承模 糊 P I D控 制
姜 宏 伟 赵 耀
( 1 、 太原重工技 术中心, 山西 太原 0 3 0 0 2 4 2 、 湖南世优 电气股份 有限公 司, 湖南 湘潭 4 1 1 1 0 1 )
:
的取值 如 下 :
:
。
( 6)
其中, 当粒子 取 得 局部 最 优 值 时 , 粒 子 惯 性权 重 为 零 , 粒子 通 过 随机扰动跳出局部 陷阱 ; 当粒子取得全局最优值时 , 粒子 以初始惯 赠 性权 重 全 速探 索 新 的搜 索 区域 。 弱 3 2 2 . 2适 应 度 函数 在评价函数的选取上 , 需要考虑评价指标是否实用 , 当系统参 数 变 化 较 大 时评 价 指 标 变 化 是否 够 大 。从 兼 顾 实用 性 和 选 择 性 出 发, 文章采用 的是偏差泛函积分评价指标 I T A E , 其是时问乘以偏差 绝 对 值 积 分 的性 能 指 标 , 可 以抑 制 长 时 间存 在 的偏 差 , 函数 表 达 式
为:
:
旦
2 S
( 7 )
J 0 。 ’
上式 中, e ( t ) 为跟踪偏差信号 ; 通常对于主动磁悬浮轴承控制系 其中, 中 . 代表通过磁极 i 的气隙磁通 ; F 。 代表转子 在定子垂直 磁极 i 方 向上 所受 的悬 浮力 ; 。 为 真 空气 隙磁 导 率 ; S 代 表 单个 磁 极 统 , I T A E性 能指 标 越 小越 好 , 其 直 接 决定 着 控制 系统 动态 跟踪 速 度 的等 效 面积 。 转子上受到电磁力 F 和F 的作用 , 其分别为 :
基于粒子群算法的风力发电机性能优化研究
基于粒子群算法的风力发电机性能优化研究随着环保意识的加强和全球化进程的推进,新能源已经成为全球各国的研究热点之一。
其中,风力发电是新能源发电技术的一种重要形式,其优点在于可再生、无污染、可调节等,已成为替代传统化石能源的主要选择之一。
然而,风力发电机的性能优化一直是该领域研究的重点。
基于粒子群算法的风力发电机性能优化研究已成为当今风力发电领域中的一个重要研究方向。
一、风力发电机性能的问题风力发电机是由转子、塔架、机身、电力系统等主要组成部分所组成的,其中转子是风力发电机的核心部分。
目前,在风力发电机的设计中,转子部分的性能是主要问题之一,它的转速、功率与风速的关系、振动、噪声等研究一直是该领域的重点。
在风力发电机的运行过程中,由于瞬态风速的变化以及变化的方向、幅度和频率等多种因素的影响,风力发电机的转子叶片往往存在失速的情况。
这种情况在高海拔特别严重。
如果在设计过程中未考虑到这些因素,转子叶片失速会带来一定的潜在危险,同时还可能影响发电机的正常发电效率。
二、粒子群算法粒子群算法是一种优化算法,它是一种群体智能算法。
它通常用来求解非线性优化问题。
粒子群算法是以仿生学中的一种行为为基础设计的优化算法,它通过模仿鸟兽聚群行为,将需要优化的问题转化为一些粒子在解空间中的移动和搜索问题,通过合理的信息共享和学习来达到优化目标。
粒子群算法依据每个粒子在空间里最优解的搜索历史,不断更新每个粒子的速度和位置,最终得到全局的最优解。
在实际应用中,粒子群算法应用广泛,比如逆向工程、人工神经网络、机器学习、模型拟合、信号处理等领域。
三、基于粒子群算法的风力发电机性能优化基于粒子群算法的风力发电机性能优化研究主要通过对风力发电机的转子部分进行优化设计,旨在减少失速现象、提高转速、提高功率等方面取得更好的效果。
当使用粒子群算法对风力发电机进行优化时,可以定义某些变量,如转速、叶片长度、叶片几何形状、叶片倾角等变量,并将这些变量作为某个公式的输入,以求解最大化输出功率的目标函数。
基于粒子群优化的磁悬浮球系统的模糊强化学习控制
第1期2021年02月石河子科技中图分类号:U273文献标识码:B文章编号:1008-0899(2021)02-0041-03磁悬浮系统是利用磁场力与物体重力保持平衡原理,而使物体悬浮在某一固定位置。
随着智能控制技术的发展,为磁悬浮技术提供了良好的发展前景[1]。
磁悬浮控制系统是非线性迟滞系统,难以建立精确的数学模型。
该系统实时性要求很高,传统的PID 控制效果并不理想,而模糊控制是不需要掌握受控对象的精确数学模型,鲁棒性较强[2-4]。
模糊控制器中量化因子的整定通常难以实现参数最优。
强化学习作为一类求解序列决策问题的机器学习方法,是一种求解复杂决策问题的有效手段[5]。
粒子群优化可以有效求解大量非线性、不可微和多峰值等复杂问题,被广泛应用到工程技术领域[6]。
本文针对磁悬浮求系统传统PID 控制,动态性能较差,控制效果不理想等问题。
结合模糊控制、强化学习和粒子群优化算法的优点,提出了一种基于粒子群优化的磁悬浮球系统模糊强化学习控制方法。
仿真和实验结果证明,该控制方法的有效性和优越性。
1磁悬浮球系统模型1.1磁悬浮球系统的基本组成磁悬浮球系统包含光源、电磁铁、传感器、功放模块、控制模块和小球等元件,系统结构如图1所示:图1磁悬浮球系统基本结构图1.2磁悬浮球系统的数学模型忽略外界环境的影响,根据动力学原理、电磁理论以及基尔霍夫电压定律,对小球列如下方程:(1)假设小球在平衡时的位移大小为x 0,电流大小为i 0,则(2)对系统用线性化理论将式(2)进行展开,并将展开式中的高次项舍去,可以表示为:(3)(4)由式(1)和式(4)可得:作者简介:龚事引(1988~),男,江西宜春人,硕士,讲师,研究方向:电气工程,自动化控制。
李丹(1991~),女,湖南益阳人,硕士,讲师,研究方向:自动化控制。
基于粒子群优化的磁悬浮球系统的模糊强化学习控制(湖南铁路科技职业技术学院,湖南株洲市,412006)龚事引(湖南铁道职业技术学院,湖南株洲市,412006)李丹摘要针对磁悬浮球系统的传统PID 控制,动态性能较差,针对模糊量化因子调节困难的问题,采用粒子群优化的强化学习方法对模糊控制器量化因子进行优化。
基于自适应粒子群算法优化PID的风电机组齿轮箱温度控制系统
基于自适应粒子群算法优化PID 的风电机组齿轮箱温度控制系统DOI :10.19557/ki.1001-9944.2024.05.014杨荣昆,朱尤成,樊瑞(国电电力云南新能源开发有限公司,昆明650000)摘要:为保障风电机组齿轮箱温度稳定,设计基于自适应粒子群算法优化PID 的风电机组齿轮箱温度控制系统。
该系统使用温度变送器获取当前风电机组齿轮箱实时温度数据,通过模拟量输入输出模块将实时温度数据输入到变论域模糊PID 控制器内,进行模糊化处理,划分温度控制量尺度变量模糊空间,建立控制变论域,依据PID 模糊规则得到PID 控制器输出的风电机组齿轮箱温度控制量。
实验结果表明,该系统运行稳定性良好,可快速控制风电机组齿轮箱温度达到指定数值,同时超调量较小,系统性能较为优秀。
关键词:粒子群算法;PID 控制器;变论域;风电机组;齿轮箱;温度控制中图分类号:TP273文献标识码:A文章编号:1001鄄9944(2024)05鄄0064鄄04Optimization of PID Based Temperature Control System for Wind Turbine Gearbox Based on Adaptive Particle Swarm Optimization AlgorithmYANG Rongkun ,ZHU Youcheng ,FAN Rui(GD Power Yunnan New Energy Development Co.,Ltd.,Kunming 650000,China )Abstract :In order to ensure the temperature stability of wind turbine gearbox ,a temperature control system of wind turbine gearbox based on adaptive particle swarm optimization PID is designed.In this system ,the temperature trans 鄄mitter is used to obtain the real 鄄time temperature data of the current wind turbine gearbox ,and the real 鄄time temper 鄄ature data is input into the variable universe fuzzy PID controller through the analog input and output module for fuzzification ,so as to divide the fuzzy space of the scale variable of the temperature control quantity ,establish the control variable universe ,and obtain the temperature control quantity of the wind turbine gearbox output by the PID controller according to the PID fuzzy rules.The experimental results show that the system has good operation stabili 鄄ty ,can quickly control the temperature of the gearbox of the wind turbine to a specified value ,and has small over 鄄shoot and excellent system performance.Key words :particle swarm optimization ;PID controller ;variable domain of discourse ;wind turbines ;gearbox ;tempera 鄄ture control收稿日期:2023-12-18;修订日期:2024-03-28基金项目:国电电力云南新能源科技项目(GDDLYNXNY 鄄202101)作者简介:杨荣昆(1973—),男,本科,工程师,研究方向为新能源控制技术;朱尤成(1972—),男,本科,工程师,研究方向为新能源控制技术。
粒子群优化变论域模糊PID的永磁同步电机矢量控制策略
粒子群优化变论域模糊PID的永磁同步电机矢量控制策略宋百玲;董刘伟;胡思远;丁宇珊
【期刊名称】《重庆理工大学学报(自然科学)》
【年(卷),期】2024(38)3
【摘要】永磁同步电机具有结构简单、噪音低、效率高等优点而得到广泛应用。
但是传统的矢量控制方法已经不能满足当前产业的控制需要,为了获得更好的控制性能,在普通PID控制的基础上,提出了一种基于粒子群算法优化的变论域模糊PID 控制方法。
分析永磁同步电机矢量控制原理,并建立了PMSM在dq坐标系下的数学模型,设计了基于PSO的变论域模糊PID控制器,利用Matlab/Simulink搭建id=0矢量控制下的PMSM调速系统仿真模型。
仿真结果表明,与传统PID控制和模糊PID控制相比,基于粒子群优化的变论域模糊PID控制方法在具备传统模糊控制和PID控制算法优点的同时,利用粒子群算法得到最佳模糊论域,提高了永磁同步电机控制系统的动态响应速度,减少了超调和波动。
【总页数】10页(P64-73)
【作者】宋百玲;董刘伟;胡思远;丁宇珊
【作者单位】东北林业大学机电工程学院
【正文语种】中文
【中图分类】TP273
【相关文献】
1.粒子群优化变论域模糊PID控制在风电机组变桨距中的应用
2.基于粒子群优化算法的变论域模糊PID控制器在过热汽温控制中的应用
3.模糊伸缩因子优化变论域的模糊PID矢量控制研究
4.遗传算法优化的模糊+变论域自适应模糊PID复合控制策略
5.基于APF的粒子群优化变论域模糊PID控制研究
因版权原因,仅展示原文概要,查看原文内容请购买。
基于改进粒子群算法的永磁同步风力发电机优化设计
基于改进粒子群算法的永磁同步风力发电机优化设计庄石榴;王爱元【摘要】根据离网型小功率永磁同步风力发电机的运行特性,结合场路耦合的方法,设计一台小功率永磁同步风力发电机.为了有效减小发电机起动阻力矩,以发电机齿槽转矩为目标,运用回归型支持向量机实现电机电磁模型的非线性回归建模;基于该非参数模型,利用带压缩因子粒子群算法进行寻优,获取电机的最优结构参数,仿真结果表明了优化设计的正确性.【期刊名称】《电力学报》【年(卷),期】2019(034)001【总页数】5页(P64-67,92)【关键词】离网型;永磁同步发电机;起动阻力矩;带压缩因子粒子群算法;优化设计【作者】庄石榴;王爱元【作者单位】上海电机学院,上海201306;上海电机学院,上海201306【正文语种】中文【中图分类】TM3150 引言风能是一种清洁能源,受到越来越多的关注,已成为当今世界最具发展潜力的能源之一[1]。
随着永磁材料性能的不断提升,小功率永磁同步发电机也成为研究热点。
离网型小功率永磁同步风力发电机在城市路灯、航运系统、偏远海岛等方面都能得到广泛应用[2]。
和电励磁电机相比,永磁电机具有高效率、高能量密度等特点。
文献[3]对永磁直驱风力发电机的主要电磁参数的选取做了介绍,设计了一台3 000 kW的直驱风力发电机,并进行空载特性、负载特性和短路特性分析。
文献[4]采用不同定子槽数,不同结构尺寸,设计了三台兆瓦级永磁同步风力发电机,通过建立发电机有限元模型,对发电机电磁场和温度场进行分析计算。
文献[5]对高速永磁同步风力发电机的磁路结构设计进行分析并确定最终方案,在此基础上设计了一台发电机,对转子的保护措施进行深入分析研究。
文献[6]将粒子群算法应用到永磁直流电动机的优化设计中,提高了永磁直流电动机的实际运行性能。
文献[7]将正交试验法应用到异步电动机多目标优化中,提高了电机优化速率。
在风力发电系统中,风速是不稳定的且随机变化,所以风力发电机一般运行速度较低。
永磁同步风力发电系统的最大功率跟踪模糊分数阶控制
永磁同步风力发电系统的最大功率跟踪模糊分数阶控制
姜礼洁;王晓燕;苏杰;张镇韬
【期刊名称】《现代电力》
【年(卷),期】2024(41)2
【摘要】在“双碳”背景下,风电作为零碳电力和新能源发电的主力军,在助力社会全面绿色低碳转型方面发挥了关键性作用。
在保证发电稳定的前提下实现风能的最大化利用,提升风力发电系统发电量至为重要。
文中针对永磁同一步风力发电系统的最大功率跟踪(maximum power point tracking, MPPT)问题进行研究。
首先建立了永磁同步风力发电系统的机理仿真模型,用两电平双PWM全功率换流器连接风力发电机与电网。
然后基于以上模型,分别设计了整数阶PI控制器、分数阶PI"控制器、模糊分数阶PP控制器以实现MPPT控制。
最后对以上控制策略进行了仿真研究。
结果表明,无论在阶跃风速还是随机风速下,模糊分数阶PU控制器相较于其他两种均具有更出色的MPPT性能与更强的鲁棒性。
【总页数】10页(P230-239)
【作者】姜礼洁;王晓燕;苏杰;张镇韬
【作者单位】华北电力大学控制与计算机工程学院;河北省发电过程仿真与优化控制技术创新中心(华北电力大学)
【正文语种】中文
【中图分类】TM614
【相关文献】
1.永磁同步风力发电机的最大功率跟踪复合预测控制
2.考虑输入饱和的直驱式永磁同步风力发电系统最大功率跟踪控制
3.双转子永磁同步风力发电系统的最大功率跟踪控制
4.基于模糊控制的永磁直驱风力发电机最大功率跟踪控制
5.基于改进变步长爬山法的永磁同步风力发电机最大功率点跟踪控制
因版权原因,仅展示原文概要,查看原文内容请购买。
改进粒子群优化算法在同步发电机励磁参数整定中的应用
改进粒子群优化算法在同步发电机励磁参数整定中的应用彭继慎;韩云涛
【期刊名称】《计算机测量与控制》
【年(卷),期】2013(21)5
【摘要】为了优化传统励磁控制系统中比例-积分-微分控制参数,文章在介绍了PSO算法的基础上,一方面引入自适应惯性权重,另一方面通过添加扰动项改进速度更新方程,提出了一种改进粒子群优化算法,并改进了适应度函数,将其应用于励磁控制系统中;在建立非线性励磁控制系统模型的基础上,设计了一种改进PSO-PID控制器,对励磁控制系统的PID参数进行整定;激励信号分别施加零起升压和负载电压扰动,新方法适应度函数为0.013,超调量为0.03%,计算时间为30.2 s,均为最小,相对于一般的粒子群优化方法具有更好的收敛速度和精度,且鲁棒性更好,能有效改善励磁控制系统空载起励动态性能.
【总页数】4页(P1341-1343,1359)
【作者】彭继慎;韩云涛
【作者单位】辽宁工程技术大学电气与控制工程学院,辽宁葫芦岛 125105;辽宁工程技术大学电气与控制工程学院,辽宁葫芦岛 125105
【正文语种】中文
【中图分类】TP303
【相关文献】
1.基于励磁扰动的静止自并励同步发电机参数的时域辨识 [J], 张莉;杨启军;罗建
2.相复励自动调整励磁装置参数整定的计算机仿真 [J], 陈江;晃勤
3.中,小型同步发电机自动调整励磁装置的原理及有关的整定计算 [J], 朱庆星
4.改进粒子群优化算法及其在PID参数整定中的应用研究 [J], 邵文;左信;张志新
5.改进粒子群模糊神经网络算法在同步发电机励磁参数整定中的应用 [J], 杨美艳;徐庆增
因版权原因,仅展示原文概要,查看原文内容请购买。
基于改进粒子群算法的励磁系统参数辨识
基于改进粒子群算法的励磁系统参数辨识
查卫华;袁越;张涛
【期刊名称】《电力系统保护与控制》
【年(卷),期】2010(038)011
【摘要】励磁系统模型参数的求取一般采用频域测试方法,但是电力系统是一个非线性系统,因此频域测试方法需要做线性化处理,而时域辨识方法中的参数模型辨识方法也存在线性化处理的问题.利用时域非参数模型辨识的方法,对待测系统受到阶跃扰动时,记录被调量的变化曲线,辨识出非线性特性,用动态拟合技术,利用被测信号采用改进的粒子群算法,根据目标函数,动态调整粒子飞行速度的惯性权重,从动态曲线求取模型参数,实现参数辨识.试验证明,新的算法能够很好地平衡调节粒子群算法的局部搜索与全局搜索的能力,克服了基本粒子群算法容易陷入局部最优的缺点.【总页数】5页(P29-32,54)
【作者】查卫华;袁越;张涛
【作者单位】河海大学电气工程学院,江苏,南京,210024;核电秦山联营有限公司,浙江,海盐,314300;河海大学电气工程学院,江苏,南京,210024;核电秦山联营有限公司,浙江,海盐,314300
【正文语种】中文
【中图分类】TM71
【相关文献】
1.基于改进遗传算法的非线性励磁系统参数辨识 [J], 赵书强;王磊;马燕峰;张昕刚;周玮
2.基于改进遗传算法的非线性发电机励磁系统参数辨识 [J], 丁富春;张明龙;李晋;宋福海
3.基于改进粒子群算法的PMSM多参数辨识 [J], 柯贤伟;张金亮;彭国生;高云;王志虎;简炜
4.基于改进粒子群算法的电流互感器J-A模型参数辨识 [J], 曹祎;王路;雷民;陈海宾;陈习文;俞磊;曾健友
5.基于改进灰狼算法的发电机励磁系统参数辨识算法 [J], 刘亨铭;曹路
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于粒子群优化的同步风力发电机励磁系统的 变论域模糊控制
张 翔, 董海鹰
( 兰州交通大学 自动化与电气工程学院, 甘肃 兰州 7 3 0 0 7 0 )
摘 要: 针对直接并网型同步风力发电机励磁系统非线性、 时变性及风力发电机运行工况多变等特点, 提出了一种基 于粒子群优化的同步风力发电机励磁系统的变论域模糊控制方法。该方法中, 通过分析确定变论域伸缩因子的结 构, 利用粒子群算法优化其参数, 实现伸缩因子参数的智能寻优。将粒子群优化的变论域模糊控制器应用于励磁控 制中, 根据电压环的性能指标建立目标函数, 通过对基本论域自适应调整, 实现了同步风力发电机励磁系统在全工况 下的自适应控制, 提高了发电机端电压的调节精度和运行的稳定性。仿真结果表明, 基于粒子群优化的变论域模糊 控制在动态性能和稳态性能上优于模糊控制。 关键词: 同步风力发电机; 励磁系统; 变论域模糊控制; 粒子群算法; 伸缩因子 中图分类号: T M 6 1 4 文献标志码: A 文章编号: 1 0 0 7 - 4 4 1 4 ( 2 0 1 5 ) 0 2 - 0 1 7 1 - 0 5
V ห้องสมุดไป่ตู้ r i a b l eU n i v e r s eF u z z yC o n t r o l o f S y n c h r o n o u s Wi n dG e n e r a t o rE x c i t a t i o n S y s t e mB a s e do nt h eP a r t i c l eS w a r mO p t i mi z a t i o n Z H A N G X i a n g ,D O N GH a i - y i n g
( S c h o o l o f A u t o m a t i c a n dE l e c t r i c a l E n g i n e e r i n g ,L a n z h o uJ i a o t o n gU n i v e r s i t y ,L a n z h o uG a n s u 7 3 0 0 7 0 ,C h i n a ) A b s t r a c t :A c c o r d i n gt ot h ec h a r a c t e r i s t i c sl i k en o n l i n e a r ,t i m e - v a r y i n ga n dc h a n g i n go p e r a t i n gc o n d i t i o n so f t h ee x c i t a t i o n s y s t e mi ns y n c h r o n o u s w i n dg e n e r a t o r w i t hd i r e c t l y g r i d - c o n n e c t e d , a v a r i a b l e u n i v e r s e f u z z y c o n t r o l d e s i g nm e t h o do f s y n c h r o n o u s w i n dg e n e r a t o r e x c i t a t i o nc o n t r o l s y s t e mb a s e do nP S Oi s p r o p o s e di nt h i s p a p e r . Wi t ht h i s m e t h o d , t h e i n t e l l i g e n t o p t i m i z a t i o no f c o n t r a c t i o n - e x p a n s i o nf a c t o r p a r a m e t e r s i s a c h i e v e db ya n a l y z i n ga n dd e c i d i n gt h es t r u c t u r eo f t h ev a r i a b l eu n i v e r s e ,a n du s i n gt h ep a r t i c l es w a r mo p t i m i z a t i o nt oo p t i m i z ei t sp a r a m e t e r s .A f t e r a p p l y i n gt h eo p t i c o n t r a c t i o n - e x p a n s i o nf a c t o r m i z e dv a r i a b l eu n i v e r s ef u z z yc o n t r o l l e r t ot h ee x c i t a t i o nc o n t r o l s y s t e m ,t h eo b j e c t i v ef u n c t i o ni s e s t a b l i s h e da c c o r d i n gt ot h e v o l t a g el o o pp e r f o r m a n c e ,t h e na d a p t i v e c o n t r o l o f s y n c h r o n o u s w i n dg e n e r a t o r e x c i t a t i o ns y s t e mi s a c h i e v e dv i a a d j u s t i n g b a s i c u n i v e r s eo f d i s c o u r s e ,w h i c hc o u l di m p r o v et h ea c c u r a c yo f t h eg e n e r a t o r t e r m i n a l v o l t a g er e g u l a t i o na n dt h es t a b i l i t yo f r u n n i n g .S i m u l a t i o nr e s u l t s s h o wt h a t t h ec o n t r o l m e t h o di s s u p e r i o r t ot h et r a d i t i o n a l f u z z yc o n t r o l i nb o t hd y n a m i cp e r f o r m a n c e a n ds t e a d y - s t a t ep e r f o r m a n c e . K e yw o r d s : s y n c h r o n o u s w i n dg e n e r a t o r ; e x c i t a t i o ns y s t e m ; v a r i a b l e u n i v e r s e f u z z y c o n t r o l ; p a r t i c l e s w a r mo p t i m i z a t i o n ; c o n t r a c t i o n- e x p a n s i o nf a c t o r