乐创电机资料
乐创自动化技术 MPC05GA 运动控制器 说明书

9 高速平面轨迹运动........................................................33
9.1 功能描述............................................................................................33 9.2 参数说明............................................................................................33 9.3 编程实现............................................................................................34
8 人机界面........................................................................31
8.1 协议及系统设置................................................................................31 8.2 地址....................................................................................................31 8.3 MPC05GA 的基本功能示例.............................................................32
IIห้องสมุดไป่ตู้
MPC05GA 运动控制器用户手册
交流伺服电机与运动控制卡的接口实验.概要
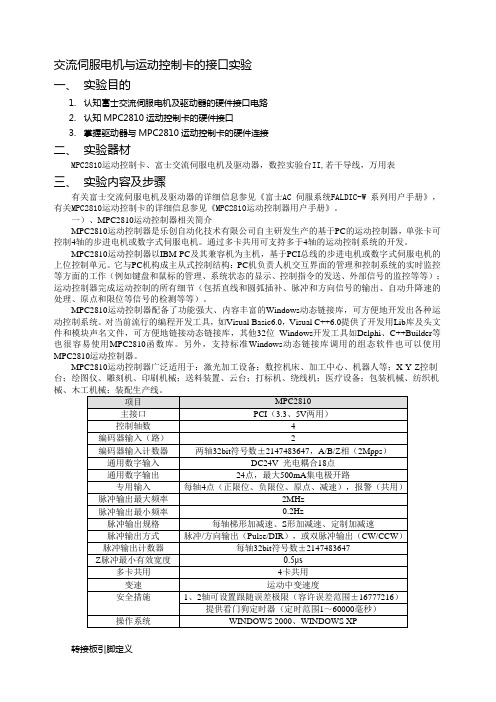
交流伺服电机与运动控制卡的接口实验一、实验目的1.认知富士交流伺服电机及驱动器的硬件接口电路2.认知MPC2810运动控制卡的硬件接口3.掌握驱动器与MPC2810运动控制卡的硬件连接二、实验器材MPC2810运动控制卡、富士交流伺服电机及驱动器,数控实验台II,若干导线,万用表三、实验内容及步骤有关富士交流伺服电机及驱动器的详细信息参见《富士AC 伺服系统FALDIC-W 系列用户手册》,有关MPC2810运动控制卡的详细信息参见《MPC2810运动控制器用户手册》。
一)、MPC2810运动控制器相关简介MPC2810运动控制器是乐创自动化技术有限公司自主研发生产的基于PC的运动控制器,单张卡可控制4轴的步进电机或数字式伺服电机。
通过多卡共用可支持多于4轴的运动控制系统的开发。
MPC2810运动控制器以IBM-PC及其兼容机为主机,基于PCI总线的步进电机或数字式伺服电机的上位控制单元。
它与PC机构成主从式控制结构:PC机负责人机交互界面的管理和控制系统的实时监控等方面的工作(例如键盘和鼠标的管理、系统状态的显示、控制指令的发送、外部信号的监控等等);运动控制器完成运动控制的所有细节(包括直线和圆弧插补、脉冲和方向信号的输出、自动升降速的处理、原点和限位等信号的检测等等)。
MPC2810运动控制器配备了功能强大、内容丰富的Windows动态链接库,可方便地开发出各种运动控制系统。
对当前流行的编程开发工具,如Visual Basic6.0,Visual C++6.0提供了开发用Lib库及头文件和模块声名文件,可方便地链接动态链接库,其他32位Windows开发工具如Delphi、C++Builder等也很容易使用MPC2810函数库。
另外,支持标准Windows动态链接库调用的组态软件也可以使用MPC2810运动控制器。
MPC2810运动控制器广泛适用于:激光加工设备;数控机床、加工中心、机器人等;X-Y-Z控制台;绘图仪、雕刻机、印刷机械;送料装置、云台;打标机、绕线机;医疗设备;包装机械、纺织机转接板引脚定义基于MPC2810运动控制器的典型运动控制系统由以下几部分组成:(1)MPC2810运动控制器、转接板及其连接电缆;(2)具有PCI插槽的PC机或工控机,安装有Windows2000 / XP 操作系统(不同型号的控制器支持的操作系统可能不同);(3)步进电机或数字式伺服电机;(4)电机驱动器;(5)驱动器电源;(6)直流开关电源,为转接板提供+24V电源。
伺服电机回零
EVOC,SOKON,华北工控,硕控智能,蓝天,四维,首控工控,艾雷斯研华工控机,华北工控机,研祥工控机leetro乐创伺服电机原点复归1.原点搜索是原点没有建立的情况下执行。
2.原点返回是原点已经建立的情况下,返回到原点位置。
原点信号又伺服驱动器给出,原点附近信号由传感器指定如果使用绝对脉冲, 那么每次发送的脉冲量, 都是相对与这个原点来说的原点输入信号没有限定由谁给定, Z相信号给定也是可以的. 不过建立原点有3种模式, 可以选择只使用原点输入信号来建立原点第一次上电, 先用建立原点.当后面的动作远离了这个原点,想返回去的时候, 选择原点返回实找零的方法有很多种,可根据所要求的精度及实际要求来选择。
可以伺服电机自身完成(有些品牌伺服电机有完整的回原点功能),也可通过上位机配合伺服完成,但回原点的原理基本上常见的有以下几种。
一、伺服电机寻找原点时,当碰到原点开关时,马上减速停止,以此点为原点。
这种回原点方法无论你是选择机械式的接近开关,还是光感应开关,回原的精度都不高,就如一网友所说,受温度和电源波动等等的影响,信号的反应时间会每次有差别,再加上从回原点的高速突然减速停止过程,可以百分百地说,就算排除机械原因,每次回的原点差别在丝级以上。
二、回原点时直接寻找编码器的Z相信号,当有Z相信号时,马上减速停止。
这种回原方法一般只应用在旋转轴,且回原速度不高,精度也不高。
三、此种回原方法是最精准的,主要应用在数控机床上:电机先以第一段高速去找原点开关,有原点开关信号时,电机马上以第二段速度寻找电机的Z相信号,第一个Z相信号一定是在原点档块上(所以你可以注意到,其实高档的数控机床及中心机的原点档块都是机械式而不会是感应式的,且其长度一定大于电机一圈转换为直线距离的长度)。
找到第一个Z相信号后,此时有两种方试,一种是档块前回原点,一种是档块后回原点(档块前回原点较安全,欧系多用,档块后回原点工作行程会较长,日系多用)。
雷赛步进电机资料.doc
什么是步进电机步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。
这一线性关系的存在,加上步进电机只有周期性的误差而无累积误差等特点。
使得在速度、位置等控制领域用步进电机来控制变的非常的简单。
虽然步进电机已被广泛地应用,但步进电机并不能象普通的直流电机,交流电机在常规下使用。
它必须由双环形脉冲信号、功率驱动电路等组成控制系统方可使用。
因此用好步进电机却非易事,它涉及到机械、电机、电子及计算机等许多专业知识。
目前,生产步进电机的厂家的确不少,但具有专业技术人员,能够自行开发,研制的厂家却非常少,大部分的厂家只一、二十人,连最基本的设备都没有。
仅仅处于一种盲目的仿制阶段。
这就给用户在产品选型、使用中造成许多麻烦。
签于上述情况,我们决定以广泛的感应子式步进电机为例。
叙述其基本工作原理。
望能对广大用户在选型、使用、及整机改进时有所帮助。
二、感应子式步进电机工作原理(一)反应式步进电机原理由于反应式步进电机工作原理比较简单。
下面先叙述三相反应式步进电机原理。
1、结构:电机转子均匀分布着很多小齿,定子齿有三个励磁绕阻,其几何轴线依次分别与转子齿轴线错开。
0、1/3て、2/3て,(相邻两转子齿轴线间的距离为齿距以て表示),即A与齿1相对齐,B 与齿2向右错开1/3て,C与齿3向右错开2/3て,A'与齿5相对齐,(A'就是A,齿5就是齿1)下面是定转子的展开图:2、旋转:如A相通电,B,C相不通电时,由于磁场作用,齿1与A对齐,(转子不受任何力以下均同)。
如B相通电,A,C相不通电时,齿2应与B对齐,此时转子向右移过1/3て,此时齿3与C偏移为1/3て,齿4与A偏移(て-1/3て)=2/3て。
如C相通电,A,B相不通电,齿3应与C对齐,此时转子又向右移过1/3て,此时齿4与A偏移为1/3て对齐。
最全电机知识|举例在全自动多孔钻床及多轴攻丝机的应用
最全电机知识|举例在全自动多孔钻床及多轴攻丝机的应用达人多轴钻床钻孔攻丝的过程是将电能转换成机械能的过程,而这个过程的转换设备即为电机。
电机(英文:Electric machinery)定义:是指依据电磁感应定律实现电能的转换或传递的一种电磁装置。
电机一般包括三类:一、电机类别1.电动机:也称电机(俗称马达),在电路中用字母“M”(旧标准用“D”)表示。
它的主要作用是产生驱动转矩,作为用电器或各种机械的动力源。
电动机是把电能转换成机械能的设备。
在机械、冶金、石油、煤炭、化学、航空、交通、农业以及其他各种工业中,电动机被广泛地应用着。
随着工业自动化程度不断提高,需要采用各种各样的控制电机作为自动化系统的元件,人造卫星的自动控制系统中,电机也是不可缺少的。
此外在国防、文教、医疗及日常生活中(现代化的家电工业中)电动机也愈来愈广泛地应用起来。
2.发电机:在电路中用字母“G”表示。
它的主要作用是利用机械能转化为电能,目前最常用的是,利用热能、水能等推动发电机转子来发电。
随着风力发电技术的日趋成熟,风电也慢慢走进我们的生活。
3.变压器:在有的书上称之为静止的电机。
二、电动机具体分类1.按工作电源的分类:2.按结构及工作原理分类:3.按起动与运行方式分类:4.按转子的结构分类:5.按用途分类:6.按运转速度分类:由于电机种类繁多,无法一一介绍,本文重点介绍常用的三相异步电动机及伺服电机两种。
三、三相异步电动机1.三相异步电动机简介异步电动机是交流电动机中最常用的一种,它的作用是将交流电能转换成机械能。
三相异步电动机应用最为广泛,因为它具有结构简单、运行可靠、维护方便、效率较高等特点,通常被用在金属切削机床、起重运输机械、中小型鼓风机和水泵等生产机械设备中。
三相异步电动机但三相异步电动机也有一些缺点,最主要的是不能经济地实现范围较广的平滑调速:必须从电网吸取滞后的励磁电流,使电网功率因数降低。
但是一般的生产机械并不要求大范围的平滑调速,而电网的功率因数又可以采取其他办法来进行补偿。
电机技术培训教材

广州平行机电技术有限公司
梦想相伴 平安前行
The dream forever Forward in peace
—-PARALLE ELECTROMECHANICAL-— 平行机电-为还纯净中国蓝天而来
转子(笼型)
• 感生电流的载体 • 旋转部分分成:
铸铝转子(低压) 铜条(铸铜)转子(高压) YX3系转子冲片为专用冲片,不能借用
轴承
• 传递机械能的载体 • 低压电机一般选用滚动轴承,其计算寿命一般 为20,000~40,000小时,即2.5~5年(连续运 转)滚动轴承采用深沟球轴承或圆柱轴承。 • Y2-225及以下一般选用双面密封轴承 • Y2-225以上一般选用开启式轴承 • 轴承系列: 62XX 系列、 63XX 系列、 NU 系列 、 7xxx系列
主要产品
• • • • • • • 基本系列电机 (Y、Y2系列) 电气派生系列 结构派生系列 特殊环境派生系列 专用系列 高压电机 直流电机(Z2,Z4)
电气派生系列
系列名称
高效率电机 如:EE、YX3 高转差率电机 如:YH
性能和结构特点
适用范围
降低电机运行损耗、提高 适用于驱动长期连续高负载率运行 效率 的设备,如纺织机械、风机、水泵、 石油行业 较高的额定转差率,较高 用于驱动转动惯量大且具有冲击性 的起动转矩,较低的起动 负载的机械,如剪床、压力机、锻 电流和较软的机械特性 压机 用于驱动静止负载或转动惯量较大 的机械
我们是平行机电 您可以把我们称之为——平行 平行,就像交易天平的公平两端,不懂尔虞我诈,不会出尔反尔, 平等而又互利,称之为“平行”。 平行,就是永不交错的两条直线,不屑一分转折,不曾丝毫偏差, 真诚而又实在,称之为“平行”。 平行,就如冲破现实的铺想理论。不固现有思维,不被社会束缚, 灵动而又创新,称之为“平行”。 平行,我们不想代表别人。 平行,我们只想做好自己。 仅此,平行。
双速电机资料

04
双速电机的故障诊断与处理
双速电机的常见故障与原因分析
双速电机的常见故障
• 电机过热 • 电机振动 • 绕组损坏
双速电机故障的原因分析
• 过热:由于长时间运行,电机内部热量无法散发 • 振动:由于电机安装不平衡或轴承损坏 • 绕组损坏:由于电机过载或短路导致绕组损坏
双速电机的故障检测与诊断方法
双速电机的控制系统设计实例
系统设计要求
• 实现双速电机的自动调速和运行 • 具有过载保护、短路保护和过热保护功能
系统设计方案
• 采用微处理器作为控制系统核心 • 配备传感器实时检测电机运行状态 • 采用驱动电路控制电机运行和调速
03
双速电机的应用领域与优势
双速电机在风机、水泵中的应用
风机、水泵的特点
谢谢观看
CREATE TOGETHER
DOCS
双速电机的故障处理与预防措施
双速电机的故障处理方法
• 对过热电机进行散热处理,如清洗散热片、增加散热装 置等 • 对振动电机进行检查和调整,如重新安装、更换轴承等 • 对绕组损坏电机进行修复或更换绕组
双速电机的预防措施
• 定期对电机进行检查和维护,确保电机正常运行 • 合理选择电机和使用环境,避免过载和过热 • 提高电机制造质量,降低故障发生率
双速电机的性能 -具有较高的运行效 率,节能效果显著
• 能够实现快速启动和制动,适应性强 • 具有较好的过载能力和可靠性
双速电机的工作原理与调速方法
双速电机的工作原理
• 当电机绕组接通电源时,产生磁场,驱动转子旋转 • 通过改变绕组接线方式,实现不同转速的运行
双速电机的调速方法
• 改变电源频率:通过变频器改变电源频率,实现电机转速的调整 • 改变绕组极数:通过切换绕组接线方式,改变电机极数,实现转速调整 • 改变转子电阻:通过改变转子电阻,调整电机的转速
乐创技术运动伺服系统设计

乐创技术运动伺服系统设计乐创技术运动伺服系统设计是现代工业自动化领域的重要组成部分。
它的设计在提升生产效率、保证产品质量、降低劳动强度等方面具有重要的指导意义。
本文将从系统结构、控制算法、安全性等多个方面全面介绍乐创技术运动伺服系统设计。
首先要介绍的是乐创技术运动伺服系统的结构。
该系统通常由电机、编码器、驱动器、控制器等几个核心部件组成。
其中,电机作为执行机构,负责实现运动控制;编码器作为反馈装置,提供位置、速度等参数的准确反馈;驱动器将控制信号转化为电机能量,控制电机的转动;控制器则负责生成控制信号,计算通过反馈获得的误差,并根据控制算法调整输出信号,实现对电机的精确控制。
其次是控制算法的设计。
乐创技术运动伺服系统采用的控制算法主要有两种:位置控制和速度控制。
在位置控制中,控制器通过计算位置误差,生成合适的控制信号,驱动电机移动到指定位置。
而在速度控制中,控制器根据速度误差,生成合适的控制信号,使电机以指定速度运动。
控制算法的选择要根据具体应用需求和系统特点进行合理的设计和调整,以满足生产实际需要。
此外,安全性也是乐创技术运动伺服系统设计中需要考虑的重要方面。
为确保系统的安全运行,应采取一系列安全措施。
例如,设置过载保护机制,以防止电机过载造成损坏;设置软件限位保护,以保证电机运动范围在安全区域内;设置急停按钮或紧急停车功能,以应对紧急情况。
此外,还应对系统进行定期维护和检查,及时发现并解决潜在安全隐患。
最后,还需要强调乐创技术运动伺服系统设计的指导意义。
首先,系统设计要根据具体的应用需求进行合理的选型和定制,确保系统能够满足实际要求。
其次,系统的稳定性和可靠性对于生产效率和产品质量有着重要的影响,因此在设计过程中应注重细节,并严格按照设计要求进行实施和测试。
最后,安全性是设计过程中不可忽视的重要方面,要充分考虑系统的安全性能,确保工作人员和设备的安全。
总之,乐创技术运动伺服系统设计是一个涉及结构、控制算法和安全性等多个方面的综合性工作。
电机基础知识及产品介绍.pptx

进水量应不达到有害影响
7
电机浸入规定压力的水中,经规定时间后电 防浸水电机
机的进水量应不达到有害程度
8
长期潜水
潜水电机
我公司常用的几种防护等级 IP 2 3
60度防淋水电机 防止直径大于12mm的固体
异物进入到电机内部 防护等级标志
2020/8/28
山东华力电机集团股份有限公司
15
2020/8/28
冷却介质 特征代号
空气
A
氢气
H
氮气
N
二氧化碳
C
水
W
油
U
冷却介质的推动方法
特征数 字
0
含义 依靠温度差促使冷却介质运动
1 冷却介质运动与电机转速有关,或因转子 本身的作用,也可以是由转子拖运的整 体风扇或泵的作用,促使介质运动
简述 自由对流 自循环
6 由安装在电机上的独立部件驱动介质运动 外装式独立部
第二位数字
“IP”后第二位数字的含义
具体含义
简述
0
无专门防护
无防护电机
1
垂直滴水无有害影响
防滴电机
2
与垂直线成15度角范围内滴水应无有害影响 15度防滴电机
3
与垂直线成60度角范围内淋水应无有害影响 防淋水电机
4
承受任何方向的溅水无有害影响
防溅水电机
5
承受任何方向的喷水应无有害影响
防喷水电机
6
承受猛烈的海浪冲击或强烈喷水时,电机的 防海浪电机
两个端盖,机座有底脚,有轴伸,借底脚安装在墙上,从D端看底脚 在右边
两个端盖,机座有底脚,有轴伸,通过底脚安装在天花板上
常用立式安装方式
代号
LabVolt系列三相旋转电机说明书

LabVolt Series DatasheetThree-Phase Wound-Rotor Induction Machine586335 (8231-0A)* The product images shown in this document are for illustration purposes; actual products may vary. Please refer to the Specifications section of each product/item for all details. Festo Didactic reserves the right to change product images and specifications at any time without notice.Festo Didactic en 240 V - 50 Hz 12/2023Three-Phase Wound-Rotor Induction Machine, LabVolt SeriesTable of ContentsGeneral Description_________________________________________________________________________________3 List of Manuals_____________________________________________________________________________________3 Table of Contents of the Manual(s)_____________________________________________________________________3 Specifications______________________________________________________________________________________3Three-Phase Wound-Rotor Induction Machine, LabVolt Series•••••••General DescriptionThe Three-Phase Wound-Rotor Induction Machine is a rotating machine mounted in a full-size EMS module. Each phase of the stator windings is independently terminated and identified on the faceplate to permit operation in either delta or star (wye) configuration. The rotor windings are brought out to the faceplate via external slip rings and brushes. This machine can be used as a wound-rotor induction motor, phase shifter, single-phase variable coupling transformer, three-phase transformer, selsyn control, frequency converter or asynchronous induction generator. The speed of the machine can be controlled through the use of the Three-Phase Rheostat.This version has a 2:1 turn ratio on the rotor, which is optimized for using with a rotor rheostat. There is also a different version that has a higher turn ratio on the rotor, to be used as a DFIG.List of ManualsDescriptionManual numberPhase-Shifting with Transformers (Workbook) ___________________________________________583981 (27082-00)The Wound-Rotor Induction Motor and Applications (Workbook) ___________________________584327 (35064-00)Table of Contents of the Manual(s)Phase-Shifting with Transformers (Workbook) (583981 (27082-00))1 Phase Shifting with TransformersThe Wound-Rotor Induction Motor and Applications (Workbook) (584327 (35064-00))1 The Wound-Rotor Induction Motor – Part I 2 The Wound-Rotor Induction Motor – Part II 3 The Wound-Rotor Induction Motor – Part III 4 Frequency Conversion 5 Reactance and Frequency 6 Selsyn ControlSpecificationsParameterValuePower Requirement 240/415 VRating Output Power 175 WStator Voltage 240/415 V, 3-phase Rotor Voltage 120/208 V, 3-phase Full-Load Speed 1315 r/min Full-Load Current 0.48 A Physical Characteristics Dimensions (H x W x D)308 x 291 x 440 mm (12.1 x 11.5 x 17.3 in)Net Weight14 kg (30.8 lb)Three-Phase Wound-Rotor Induction Machine, LabVolt Series Reflecting the commitment of Festo Didactic to high quality standards in product, design, development, production, installation, and service, our manufacturing and distribution facility has received the ISO 9001 certification.Festo Didactic reserves the right to make product improvements at any time and without notice and is not responsible for typographical errors. Festo Didactic recognizes all product names used herein as trademarks or registered trademarks of their respective holders. © Festo Didactic Inc. 2023. All rights reserved.Festo Didactic SERechbergstrasse 373770 DenkendorfGermanyP. +49(0)711/3467-0F. +49(0)711/347-54-88500Festo Didactic Inc.607 Industrial Way WestEatontown, NJ 07724United StatesP. +1-732-938-2000F. +1-732-774-8573Festo Didactic Ltée/Ltd675 rue du CarboneQuébec QC G2N 2K7CanadaP. +1-418-849-1000F. +1-418-849-1666。
乐创LC_LO1破壁机使用说明
乐创LC_LO1破壁机使用说明
1、破壁机在进行使用的时候整个产品的电功率相对来讲也是比较大的,转速也非常高,而且发热量同样也非常的大所以说整个破壁机工作时间最好不要维持在太长最好不要让在电机进行实际旋转的过程当中,连续性转动三分钟以上的时间。
需要连续使用的时候,应该保障他们的工作,最好能够做到三分钟之后让其冷却,然后再做启动工作,这样的话原本的一些模式就能够满足现有的加热需要,在破壁机进行实际制作的时候每- -次制作完成之后,就要让整个产品冷却15分钟然后再重新重复工作,这样有利于对整个设备的保护。
2、破壁机在进行实际使用的时候,不要让机器处于一种干烧的状态,在制作的过程当中,最好能够结合实际情况来烹饪我们想要的食物,而且在烹饪食物的时候一定要加满水。
3、在通电的情况之下,一不要其他的工具来触碰刀头,如果出现刀头被卡住的情况,应该先断电然后在清理里面一些其他的东西,防止出现意外情况。
leetro LT7310 控制器 硬件说明书
LT7310控制器硬件用户手册(0.4版)版权申明乐创自动化技术有限公司保留所有权利乐创自动化技术有限公司(以下简称乐创自动化公司)保留在不事先通知的情况下,修改本手册中的产品和产品规格等文件的权利。
乐创自动化公司不承担由于使用本手册或本产品不当,所造成直接的、间接的、附带的或相应产生的损失或责任。
乐创自动化公司具有本产品及其软件的专利权、版权和其它知识产权。
未经授权,不得直接或间接地复制、制造、加工、使用本产品及其相关部分。
I前言感谢购买LT7310控制器,该控制器是乐创公司针对气动打标研制的一款高性能运动控制系统。
本手册介绍了关于LT7310的规格、使用方法,使用前请充分理解LT7310的使用功能。
安全警告注意以下警告,以免伤害操作人员及其他人员,防止机器损坏。
下面的“危险”和“警告”符号是按照其事故危险的程度来标出的。
危 险警 告下列符号指示哪些是禁止的,或哪些是必须遵守的。
常规安全概要请查看下列安全防范措施以避免受伤害并防止对本产品或任何与其相II连接的产品造成损伤。
为避免潜在的危险,请仅按详细说明来使用本产品。
使用正确的电源线。
请使用满足国家标准的电源线。
正确地连接和断开。
先将电机正确连接到控制系统,最后开启电源。
断开时先关闭外部电源,再断开电机与控制系统的连接。
当有可疑的故障时不要进行操作。
如果您怀疑本产品有损伤,请让有资格的服务人员进行检查。
不要在的湿的/潮湿环境下操作。
不要在爆炸性的空气中操作。
保持产品表面清洁和干燥。
防止静电损伤。
静电释放(ESD)可能会对控制系统及其附件中的元件造成损伤。
不要将控制器放置在可能产生静电的表面。
在防护静电的袋子或容器内运输和储存控制器。
关于保证保修时间在指定的地点购买的产品的保修期为1年。
保修范围(1)如果在上述质保期内由于本公司责任发生了故障,本公司提供无偿修理。
以下范围不在保修范围内:对于说明书及其它手册记录的不适当环境或不适当使用引起的故障。
电机基本知识 马达基本知识

电机基本知识马达基本知识本文转载自电机维修电机电机,俗称“马达”,是指依据电磁感应定律实现电能的转换或传递的一种电磁装置。
电动机也称(俗称马达),在电路中用字母“M”(旧标准用“D”)表示。
它的主要作用是产生驱动转矩,作为用电器或各种机械的动力源,发电机在电路中用字母“G”表示。
电机汉语拼音:diànjī英文:[electric machinery] 泛指能使机械能转化为电能、电能转化为机械能的一切机器。
特指发电机、电能机、电动机。
[1]电机及电机学概念(electric machine and electric machine theory concept)定义:电机是指依据电磁感应定律实现电能的转换或传递的一种电磁装置。
电动机也称(俗称马达),在电路中用字母“M”(旧标准用“D”)表示。
它的主要作用是产生驱动转矩,作为用电器或各种机械的动力源。
发电机在电路中用字母“G”表示。
它的主要作用是利用机械能转化为电能,目前最常用的是,利用热能、水能等推动发电机转子来发电,随着风力发电技术的日趋成熟,风电也慢慢走进我们的生活。
变压器,在有的书上称之为静止的电机。
从电机的定义发现,这么说也有它的道理的。
电动机的种类1.按工作电源种类划分:可分为直流电机和交流电机。
1.1直流电动机按结构及工作原理可划分:无刷直流电动机和有刷直流电动机。
1.1.1有刷直流电动机可划分:永磁直流电动机和电磁直流电动机。
1.1.1.1电磁直流电动机划分:串励直流电动机、并励直流电动机、他励直流电动机和复励直流电动机。
1.1.1.2永磁直流电动机划分:稀土永磁直流电动机、铁氧体永磁直流电动机和铝镍钴永磁直流电动机。
1.2其中交流电机还可分:单相电机和三相电机。
2.按结构和工作原理划分:可分为直流电动机、异步电动机、同步电动机。
2.1同步电机可划分:永磁同步电动机、磁阻同步电动机和磁滞同步电动机。
2.2异步电机可划分:感应电动机和交流换向器电动机。
Eaton Moeller MSC-DE-1.2-M7(24VDC)电机启动器说明书
Eaton 121736Eaton Moeller® series MSC-DE DOL starter, 380 V 400 V 415 V:0.37 kW, Iq= 100 kA, Ir= 0.3 - 1.2 A, 24 V DC, DC voltageSpécifications généralesEaton Moeller® series MSC-DE DOLstarter1217364015081195466102 mm198 mm45 mm0.78 kgIEC/EN 60947-4-1 VDE 0660MSC-DE-1,2-M7(24VDC)Product Name Catalog NumberEANProduct Length/Depth Product Height Product Width Product Weight Certifications Model CodeShort-circuit releaseTemperature compensated overload protection AdjustableScrew terminalsNo1For all combinations with an SWD activation, you need not adhere to the minimum current flow times and minimum cut-out periods.500 (Class 5) AC-4 cycle operation, Main conducting paths 700 (Class 10) AC-4 cycle operation, Main conducting paths Note: Going below the minimum current flow time can cause overheating of the load (motor).900 (Class 15) AC-4 cycle operation, Main conducting paths 1000 (Class 20) AC-4 cycle operation, Main conducting paths≤ 500 ms, main conducting paths, AC-4 cycle operationIP20NEMA OtherDirect starterDIN rail10.3 A1.2 AFitted with: Functions ClassConnectionConnection to SmartWire-DTCoordination typeCurrent flow times - minCut-out periods - minDegree of protectionModelMounting methodNumber of auxiliary contacts (normally closed contacts) Number of auxiliary contacts (normally open contacts) Overload release current setting - minOverload release current setting - maxOvervoltage categoryIII 36000 V ACAlso motors with efficiency class IE3 Starter with electronic trip unitDC Max. 2000 m -25 °C55 °C1.1 A1.2 A0.18 kW0.37 kW230 - 415 V AC15 A, Class J/CC, max. Fuse, SCCR (UL/CSA) 100 kA, Fuse, SCCR (UL/CSA)186 A 2.6 W 0 V0 V0 V0 V 24 V 24 VPollution degreeRated impulse withstand voltage (Uimp) Suitable forTypeVoltage type AltitudeAmbient operating temperature - minAmbient operating temperature - maxRated operational current (Ie)Rated operational current (Ie) at AC-3, 380 V, 400 V, 415 V Rated operational power at AC-3, 220/230 V, 50 HzRated operational power at AC-3, 380/400 V, 50 HzRated operational voltageShort-circuit current rating (high fault at 600 V) Short-circuit release (Irm) - max Power consumption (sealing) at DCRated control supply voltage (Us) at AC, 50 Hz - min Rated control supply voltage (Us) at AC, 50 Hz - max Rated control supply voltage (Us) at AC, 60 Hz - min Rated control supply voltage (Us) at AC, 60 Hz - max Rated control supply voltage (Us) at DC - minRated control supply voltage (Us) at DC - max0.6 W0 W0.2 W1.2 A2.6 WMeets the product standard's requirements.Meets the product standard's requirements.Meets the product standard's requirements.Meets the product standard's requirements.Meets the product standard's requirements.Does not apply, since the entire switchgear needs to be evaluated.Does not apply, since the entire switchgear needs to be evaluated.Meets the product standard's requirements.Does not apply, since the entire switchgear needs to be evaluated.Meets the product standard's requirements.Does not apply, since the entire switchgear needs to be Simple, flexible and safe! Distribution system for motor-starter combinationsDA-CE-ETN.MSC-DE-1,2-M7(24VDC)IL034038ZUDA-CS-msc_de_bg1DA-CD-msc_de_bg1DA-DC-00004244.pdfDA-DC-00004108.pdfeaton-manual-motor-starters-starter-msc-d-dol-starter-dimensions-002.epseaton-manual-motor-starters-mounting-msc-d-dol-starter-3d-drawing.eps eaton-manual-motor-starters-starter-msc-d-dol-starter-3d-drawing.epseaton-manual-motor-starters-device-msc-d-dol-starter-wiring-diagram.epsEquipment heat dissipation, current-dependent PvidHeat dissipation capacity PdissHeat dissipation per pole, current-dependent PvidRated operational current for specified heat dissipation (In) Static heat dissipation, non-current-dependent Pvs10.2.2 Corrosion resistance10.2.3.1 Verification of thermal stability of enclosures10.2.3.2 Verification of resistance of insulating materials to normal heat10.2.3.3 Resist. of insul. mat. to abnormal heat/fire by internal elect. effects10.2.4 Resistance to ultra-violet (UV) radiation10.2.5 Lifting10.2.6 Mechanical impact10.2.7 Inscriptions10.3 Degree of protection of assemblies10.4 Clearances and creepage distances10.5 Protection against electric shock BrochureseCAD model Instructions d'installation mCAD modelRapports de certification SchémasSchémas électriquesEaton Corporation plc Eaton House30 Pembroke Road Dublin 4, Ireland © 2023 Eaton. Tous droits réservés.Eaton is a registered trademark.All other trademarks are property of their respectiveowners./socialmediaevaluated.Does not apply, since the entire switchgear needs to be evaluated.Is the panel builder's responsibility.Is the panel builder's responsibility.Is the panel builder's responsibility.Is the panel builder's responsibility.Is the panel builder's responsibility.The panel builder is responsible for the temperature rise calculation. Eaton will provide heat dissipation data for the devices.Is the panel builder's responsibility. The specifications for the switchgear must be observed.Is the panel builder's responsibility. The specifications for the switchgear must be observed.The device meets the requirements, provided the information in the instruction leaflet (IL) is observed.10.6 Incorporation of switching devices and components 10.7 Internal electrical circuits and connections 10.8 Connections for external conductors 10.9.2 Power-frequency electric strength 10.9.3 Impulse withstand voltage 10.9.4 Testing of enclosures made of insulating material 10.10 Temperature rise10.11 Short-circuit rating10.12 Electromagnetic compatibility10.13 Mechanical function。
磁悬浮电机

磁悬浮电机的技术创新与发展动态
技术创新
• 磁路设计创新:采用新型磁极形状和磁屏蔽设计,提高磁场性能 • 控制策略创新:采用人工智能、物联网等先进技术,实现磁悬浮电机的智能化控 制 • 传感器技术创新:采用新型传感器技术和信号处理算法,提高检测精度和可靠性
发展动态
• 国际竞争加剧:各国纷纷加大对磁悬浮电机技术的研发力度,争夺市场份额 • 产业化进程加速:磁悬浮电机技术在各类应用领域的产业化进程加速 • 政策支持加大:各国政府加大对磁悬浮电机技术的政策支持力度,推动产业发展
磁悬浮电机在其他领域的应用与前景
航空航天
• 采用磁悬浮电机作为发动机驱动电机,提高发动机的效 率和稳定性 • 如无人机、火箭等
医疗器械
• 采用磁悬浮电机作为医疗设备驱动电机,实现高精度、 低噪音的医疗效果 • 如磁共振成像(MRI)设备等
04
磁悬浮电机的技术挑战与发展趋势
磁悬浮电机的技术难题与研究方向
设计要点
• 磁路设计:合理分布磁极,产生稳定的磁场 • 控制系统设计:采用高性能控制器,实现高精度控制 • 传感器设计:选择合适的传感器类型和安装位置,提高检测精度
磁悬浮电机的磁路设计与优化
磁路设计
• 磁极分布:合理分布磁极,使磁场在转子表面产生均匀的悬浮力 • 磁材料选择:选择高磁能密度、低损耗的磁材料,如钕铁硼 • 磁屏蔽设计:在磁路中设置磁屏蔽,减少漏磁,提高效率
磁路优化
• 磁极形状优化:采用优化的磁极形状,提高磁场分布的均匀性 • 磁路间隙优化:合理设置磁路间隙,降低磁阻,提高效率 • 磁材料用量优化:在保证性能的前提下,尽量减少磁材料的用量,降低成本
磁悬浮电机的控制系统设计与实现
制、模糊控制等先进的控制策略 • 传感器信号处理:对传感器信号进行滤波、放大等处理,提高信号质量 • 驱动电路设计:设计合适的驱动电路,实现电枢电流的调整