整车控制器VCU的开发与测试
纯电动汽车整车控制器(vcu)研究
车辆工程技术 2 车辆技术纯电动汽车整车控制器(VCU)研究宋述铨(天津优控智行科技有限公司,天津 300000)摘 要:电动汽车主要由电池管理系统(BMS),整车控制系统(VCS),以及电机控制器(MCU)等构成。
整车控制器(VCU)是电动汽车的重要控制结构,对汽车的各种信息进行检测、对车内通信网络和异常信息进行监控等,能够提高整车驾驶性能,进行制动能量回馈完善能源管理。
提升整车舒适性,使用户获得完美体验。
关键词:纯电动汽车;整车控制器;完美体验 随着社会的发展与科技的进步,各个城市的汽车使用户喷井式增加。
传统的内燃机汽车消耗石油,排出大量废气,使得城市的空气质量不断下降。
纯电动汽车由于不使用传统化石能源,对环境不造成污染,受到人们的青睐。
随着科技的进步,电动汽车的核心技术不断地革新与突破,逐渐完善的城市基础设施提供了有利的帮助,电动汽车已经成为潜力股,逐步取代传统汽车变为可能。
本文从汽车结构出发,结合整车信息传输过程,设计了整车控制器的软硬件结构。
1 整车电控系统组成 整车电控系统主要由整车控制器VCU为核心,通过硬线信号指挥各控制器使能,通过CAN总线信号控制储能系统、电机系统等关键总成执行相应的上下电动作以及扭矩指令。
最终完成整车的驾驶运行以及高压充电。
其中,低压部分完成车辆控制器供电和信号采集通讯。
高压部分通过高压线束将动力电池的电能传输到空调压缩机、电动机等高压供电设备,实现动力电能的传输。
其中电机、电池、电控系统被称为“三电”系统,主要包括:1.1 整车控制器 整车控制器系统为整车的运行大脑,具有高可靠性、高运行效率、逻辑缤密性。
整车控制系统上电后首先运行初始化程序并且自检,在自身没有问题后驱动端口使能储能系统、电机系统上电。
储能系统和电机系统完成上电后同样分别进行上电自检。
所有系统自检无故障且驾驶员有上高压指令时,整车控制系统通过总线驱动储能系统、电机系统完成上高压动作。
1.2 储能系统 储能系统包括动力电池组和BMS管理单元。
分层式拓扑结构整车控制器(VCU)
电动汽车整车控制系统对纯电动汽车而言,电动机驱动和制动能量回收的最大功率都受到电池放电/充电能力的制约。
对混合燃料电池轿车和燃料电池大巴而言,由于其具有两个或两个以上的动力源,增加了系统设计和控制的灵活性,使汽车可以在多种模式下工作适应不同工况下的需求,获得比传统汽车更好的燃料电池性能,降低了有害物的排放,减小对环境的污染和危害,从而达到环保和节能的双重标准。
首先要针对给定的车辆和参数的条件,选择合适的动力系统构型,完成动力系统的参数匹配和优化。
在此基础上,建立整车控制系统来协调汽车工作模式的切换和多个动力源/能量源之间的功率/能量流的在线优化控制。
整车控制系统由整车控制器、通信系统、零部件控制器以及驾驶员操纵系统构成,其主要功能是根据驾驶员的操作和当前的整车和零部件工作状况,在保证安全和动力性的前提下,选择尽可能优化的工作模式和能量分配比例,以达到最佳的燃料经济性和排放指标。
(1)整车控制系统及功能分析1)控制对象:电动汽车驱动系统包括几种不同的能量和储能元件(燃料电池,内燃机或其他热机,动力电池和/或超级电容),在实际工作过程中包括了化学能、电能和机械能之间的转化。
电动汽车动力系统能流图如图5—6所示。
2)整车控制系统结构:电动汽车动力系统的部件都有自己的控制器,为分布式分层控制提供了基础。
分布式分层控制可以实现控制系统的拓扑分离和功能分离。
拓扑分离使得物理结构上各个子系统控制系统分布在不同位置上,从而减少了电磁干扰,功能分离使得各个子部件完成相对独立的功能,从而可以减少子部件的相互影响并提高了容错能力。
电动汽车分层结构控制系统如图5-7所示。
最底层是执行层,由部件控制器和一些执行单元组成,其任务是正确执行中间层发送的指令,这些指令通过CAN总线进行交互,并且有一定的自适应和极限保护功能;中间层是协调层,也就是整车控制器(VMS),它的主要任务一方面根据驾驶员的各种操作和汽车当前的状态解释驾驶员的意图,另一方面根据执行层的当前状态,做出最优的协调控制;最高层是组织层,由驾驶员或者制动驾驶仪来实现车辆控制的闭环。
电动汽车整车控制器(VCU)技术及开发流程深度剖析

电动汽车整车控制器(VCU)技术及开发流程深度剖析整车控制器(VCU),电动汽车的大脑,相当于电脑的Windows,手机的Andrio。
作为电动汽车上全部电气的运行平台,它的性能优劣,直接影响其他电气性能的发挥,是整车性能好坏的决定性因素之一。
1. 组成1.1结构组成VCU,结构上,由金属壳体和一组PCB线路板组成。
1.2硬件组成功能上由主控芯片及其周边的时钟电路、复位电路、预留接口电路和电源模块组成最小系统。
在最小系统以外,一般还配备数字信号处理电路,模拟信号处理电路,频率信号处理电路,通讯接口电路(包括CAN通讯接口和RS232通讯接口)2. 各电气与VCU之间是怎样工作的一些用于监测车体自身状态的信号或者车载部件中比较重要的开关信号、模拟信号和频率信号,由传感器直接传递给VCU,而不通过CAN总线。
电动汽车上的其他具有独立系统的电气,一般通过共用CAN总线的方式进行信息传递。
2.1直接传递的信号们开关信号包括:钥匙信号,档位信号,充电开关,制动信号等;模拟信号一般有:加速踏板信号,制动踏板信号,电池电压信号等;频率信号,比如车速传感器的电磁信号。
输出的开关量,动力电池供电回路上的接触器和预充继电器,在一些车型上,由VCU负责控制。
2.2通过CAN交互的电气单元CAN总线上的通讯参与者地位不分主从,随时随地向总线发动信息。
信息之间的先后顺序由发出信息者的优先级确定。
优先级在通讯协议中已经做出规定,每条信息里都有发信者的地址编码;通讯中的信息编码,都有相应的通讯协议予以明确规定。
谁发出什么样的代码提供哪些类型的信息,主要依据是供需双方的约定。
比如下面表格中的电气单元地址编码,就是来自一份整车厂与VCU供应商的技术协议。
CAN故障记录,是维修调试人员最好的小帮手。
下图是通讯协议中对故障代码的规定,常见的故障类型都位列其中,只要对照协议表格,大家都可以读懂故障记录了。
比较例外的是充换电相关的系统,由于通用性的强烈需求,通讯协议需要统一,有国家标准予以统一编码(下文列举了相关国标)。
国内外电动汽车整车控制器(VCU)性能指标及设计思路
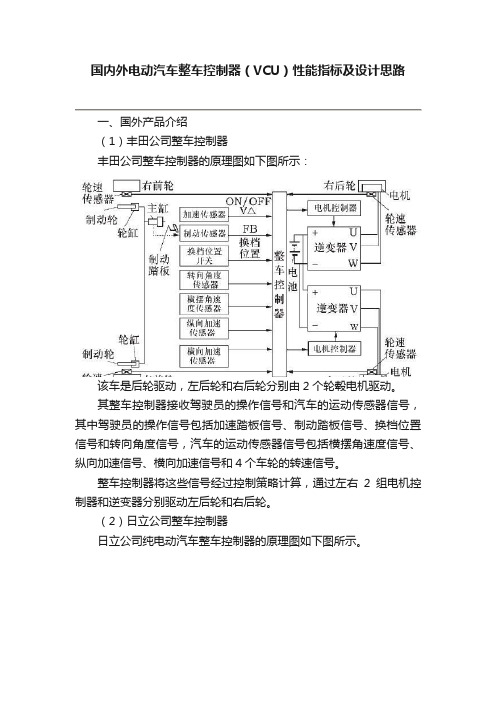
国内外电动汽车整车控制器(VCU)性能指标及设计思路一、国外产品介绍(1)丰田公司整车控制器丰田公司整车控制器的原理图如下图所示:该车是后轮驱动,左后轮和右后轮分别由2个轮毂电机驱动。
其整车控制器接收驾驶员的操作信号和汽车的运动传感器信号,其中驾驶员的操作信号包括加速踏板信号、制动踏板信号、换档位置信号和转向角度信号,汽车的运动传感器信号包括横摆角速度信号、纵向加速信号、横向加速信号和4个车轮的转速信号。
整车控制器将这些信号经过控制策略计算,通过左右2组电机控制器和逆变器分别驱动左后轮和右后轮。
(2)日立公司整车控制器日立公司纯电动汽车整车控制器的原理图如下图所示。
图中电动汽车是四轮驱动结构,其中前轮由低速永磁同步电机通过差速器驱动,后轮由高速感应电机通过差速器驱动。
整车控制器的控制策略是在不同的工况下使用不同的电机驱动电动汽车,或者按照一定的扭矩分配比例,联合使用2台电机驱动电动汽车,使系统动力传动效率最大。
当电动汽车起步或爬坡时,由低速、大扭矩永磁同步电机驱动前轮。
当电动汽车高速行驶时,由高速感应电机驱动后轮。
(3)日产公司整车控制器日产聆风LEAF是5门5座纯电动轿车,搭载锂离子电池,续驶里程是160km。
采用200V家用交流电,大约需要8h可以将电池充满;快速充电需要10min,可提供其行驶50km的用电量。
日产聆风LEAF的整车控制器原理图如下图所示,它接收来自组合仪表的车速传感器和加速踏板位置传感器的电子信号,通过子控制器控制直流电压变换器DC/DC、车灯、除霜系统、空调、电机、发电机、动力电池、太阳能电池、再生制动系统。
(4)英飞凌新能源汽车VCU & HCU解决方案该控制器可兼容12V及24V两种供电环境,可用于新能源乘用车、商用车电控系统,作为整车控制器或混合动力控制器。
该控制器对新能源汽车动力链的各个环节进行管理、协调和监控,以提高整车能量利用效率,确保安全性和可靠性。
整车控制器(VCU)策略及开发流程
整车控制器(VCU)策略及开发流程一、VCU的作用与功能在电动汽车中,VCU是核心控制部件,它根据加速踏板位置、档位、制动踏板力等驾驶员的操作意图和蓄电池的荷电状态计算出运行所需要的电机输出转矩等参数,从而协调各个动力部件的运动,保障电动汽车的正常行驶。
此外,可通过行车充电和制动能量的回收等实现较高的能量效率。
在完成能量和动力控制部分控制的同时,VCU还可以与智能化的车身系统一起控制车上的用电设备,以保证驾驶的及时性和安全性。
因此,VCU的设计直接影响着汽车的动力性、经济性、可靠性和其他性能。
1、VCU主要功能1)整车能量分配及优化管理;根据驾驶员的具体操作和实际工况对车辆进行管理、优化及调整,以实现优化能量供给,延长车辆使用寿命,提高车辆运行经济性。
2)故障处理及诊断功能;对出现的异常情况进行诊断、提示和主动修复工作。
3)系统状态仪表显示;4)整车设备管理监控各设备运行状态,及时进行动态调整。
5)系统控制根据既定的操控程序对驾驶员的各项操作进行及时响应,实时与数据库进行比对,对各节点进行动态控制。
二、VCU的结构VCU为纯电动汽车的调度控制中心,负责与车辆其他部件进行通信,协调整车的运行。
VCU系统结构,如下图所示。
其主要包含电源电路、开关量输入/输出模块、模拟量输入模块及CAN通讯模块。
1)电源模块从车载12V蓄电池取电,开关量输入模块接收的信号主要有钥匙信号、挡位信号、制动开关信号等;2)开关量输出信号主要是控制继电器,其在不同整车系统中意义略有不同,一般情况下控制如水泵继电器及PTC继电器等;3)模拟量输入模块采集加速踏板和制动踏板开度信号及蓄电池电压信号等;4)CAN模块负责与整车其他设备通信,主要设备有电机控制器(MCU)、电池管理系统(BMS)及充电机等。
三、整车通信网络管理整车系统通过CAN通信网络将各个子控制系统连接在一起。
整车系统通讯网络结构如下图所示。
VCU起到协调管理整个通信网络的功能,是各个子设备的通信服务端。
vcu调试大纲

vcu调试大纲VCU(Vehicle Control Unit)是车辆控制单元,用于控制车辆的各种功能。
在调试VCU 时,一般需要按照以下大纲进行:硬件调试:检查VCU的硬件连接是否正确,包括电源、信号线等。
使用万用表等工具测量VCU的电源电压是否正常。
检查通信接口(如CAN、LIN等)是否正常工作。
软件调试:加载VCU的软件,并确保软件能够正常运行。
通过诊断工具或仿真器对VCU进行调试,检查软件功能是否正常。
对软件进行单元测试、集成测试和系统测试,确保软件在不同场景下都能够正常工作。
功能调试:针对VCU控制的各种功能进行调试,如发动机控制、灯光控制、空调控制等。
使用模拟信号或实际信号对VCU进行输入,观察输出是否符合预期。
对VCU的故障诊断功能进行测试,确保在故障发生时能够正确识别和处理。
通信调试:检查VCU与其他ECU或外部设备之间的通信是否正常。
使用诊断工具或仿真器对通信协议进行测试,确保通信的稳定性和可靠性。
性能调试:对VCU的性能进行测试,包括处理速度、内存占用等。
使用负载测试和压力测试对VCU进行性能评估,确保其在高负载或恶劣环境下也能够正常工作。
安全性调试:对VCU的安全性进行测试,包括加密算法、访问权限等。
检查VCU的抗干扰能力,确保在电磁干扰或电源波动等环境下能够正常工作。
文档编写:编写调试报告,记录调试过程中的问题和解决方法。
编写用户手册和技术文档,为用户提供使用和维护指南。
后期维护:对调试过程中发现的问题进行修复和优化。
定期更新软件和文档,以适应新的功能和需求。
基于V流程的电动汽车VCU的开发和测试
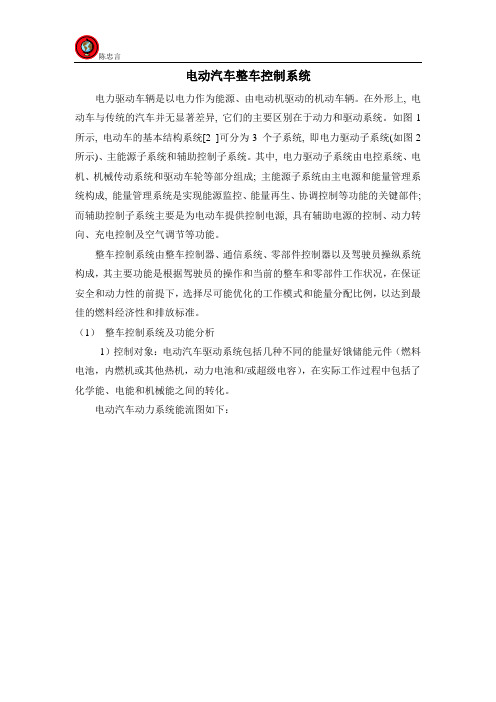
电动汽车整车控制系统电力驱动车辆是以电力作为能源、由电动机驱动的机动车辆。
在外形上, 电动车与传统的汽车并无显著差异, 它们的主要区别在于动力和驱动系统。
如图1 所示, 电动车的基本结构系统[2 ]可分为3 个子系统, 即电力驱动子系统(如图2 所示)、主能源子系统和辅助控制子系统。
其中, 电力驱动子系统由电控系统、电机、机械传动系统和驱动车轮等部分组成; 主能源子系统由主电源和能量管理系统构成, 能量管理系统是实现能源监控、能量再生、协调控制等功能的关键部件; 而辅助控制子系统主要是为电动车提供控制电源, 具有辅助电源的控制、动力转向、充电控制及空气调节等功能。
整车控制系统由整车控制器、通信系统、零部件控制器以及驾驶员操纵系统构成,其主要功能是根据驾驶员的操作和当前的整车和零部件工作状况,在保证安全和动力性的前提下,选择尽可能优化的工作模式和能量分配比例,以达到最佳的燃料经济性和排放标准。
(1)整车控制系统及功能分析1)控制对象:电动汽车驱动系统包括几种不同的能量好饿储能元件(燃料电池,内燃机或其他热机,动力电池和/或超级电容),在实际工作过程中包括了化学能、电能和机械能之间的转化。
电动汽车动力系统能流图如下:能量流信息流3)整车控制系统对车辆性能的影响主要有三个方面:①动力性和经济性②安全性③驾驶舒适性及整车的协调控制电动汽车整车控制系统如下:(2)整车控制器1)整车控制器功能:整车控制器是控制系统的核心,承担了数据交换、安全管理和能量分配的任务。
根据重要程度和实现次序,其功能划分如下。
①数据交互管理层②安全故障管理层③驾驶员意图层④能量流管理层2)整车控制器硬件:ControlBase_VT for AT/AMT/DCT/HEV/EV模块图环境试验电性能试验订购信息3)整车控制器的开发现在的ECU开发多采用V模式开发流程。
V模型开发流程如下:第一步,功能定义和离线仿真第二步,快速控制器原型和硬件开发第三步,目标代码生成第四步,硬件在环仿真第五步,调试和标定控制器开发采用国际流行的V流程开发模式,V流程开发模式示意图如下:控制器开发V流程V流程包含五个基本步骤:(1)图形化建模和离线仿真:在这个阶段,我们将控制器的开发需求转换为SIMULINK模型算法设计,将控制器的算法和被控对象的算法共同在MATLAB/SIMULINK环境下搭建。
混合动力汽车整车控制器开发与试验
混合动力汽车整车控制器开发与试验尉进;赵韩;江昊【摘要】基于飞思卡尔公司的双核微控制器9S12XDT512开发了一款通用的混合动力汽车(HEV)整车控制器(Vehicle Control Unit-VCU),设计时考虑硬件的通用性,使之能够适用于多种混合动力汽车的整车控制.为验证VCU功能,本文以某款并联混合动力公交车为控制对象,在基于dSPACE的硬件在环仿真系统上进行了一系列仿真试验.试验结果表明:VCU能够准确地控制整车实现混合动力工作状态,进而验证了VCU硬件的有效性.【期刊名称】《汽车科技》【年(卷),期】2012(000)003【总页数】6页(P70-75)【关键词】混合动力汽车;整车控制器;9S12XDT512;双核微控制器;dSPACE;硬件在环仿真【作者】尉进;赵韩;江昊【作者单位】合肥工业大学机械与汽车工程学院,合肥230009;合肥工业大学机械与汽车工程学院,合肥230009;合肥工业大学机械与汽车工程学院,合肥230009【正文语种】中文【中图分类】U462不断加深的世界能源危机以及严峻的环境问题促使世界各国把新能源汽车作为未来汽车工业发展的主流方向[1-2]。
未来10年内,按照国家新能源汽车的相关政策和国际上技术发展的趋势,混合动力汽车和纯电动汽车将作为一种比较成熟的交通工具得到规模化的应用[3]。
中国科技部也将“混合动力汽车产业化技术攻关”列为国家高技术发展计划(863计划)重点发展项目之一。
VCU是混合动力汽车的核心控制部件,高性能、高可靠性及成本低廉是其硬件设计需要考虑的三个重要方面。
目前国内整车控制器多是针对相应车辆进行的专门设计,不同种类车辆使用的控制器硬件不能完全通用[4-6]。
对VCU硬件进行通用性设计可以降低硬件设计、试验及维护成本。
本文期望通过综合考虑多种HEV的控制需求,设计出符合通用性要求的VCU平台,届时仅更改其内部软件和外部接线方式即可使其匹配至诸如ISG(起动机/发电机一体化)、串联式、并联式等类型的混合动力汽车上,实现整车控制功能。
新能源汽车VCU 诊断软件系统开发
10.16638/ki.1671-7988.2019.10.020新能源汽车VCU诊断软件系统开发*周亚芬,钟日敏,黄祖朋(上汽通用五菱汽车股份有限公司技术中心,广西柳州545007)摘要:近年来,随着新能源汽车技术特别是智能化汽车技术的发展,汽车电子领域发生了重大的变革—汽车电子系统日趋复杂,电控元器件日益增加。
汽车电子的变革导致了汽车软件开发平台化及标准流程化占据了更重要地位。
对汽车整车控制器(VCU)软件开发,功能安全及诊断模块的开发需要对更多的电子控制单元进行诊断监控,保证车辆的安全与舒适性。
基于此,文章对汽车诊断功能软件、平台化的软件开放式架构、功能安全评估手段进行了深入的研究。
关键词:新能源汽车;整车控制器;功能安全;诊断;AUTOSAR中图分类号:U472.9 文献标识码:A 文章编号:1671-7988(2019)10-55-03A Developing Method of New Energy vehicle Diagnostic System*Zhou Yafen, Zhong Rimin, Huang Zupeng( SAIC GM Wuling Automobile Co., Ltd., Guangxi Liuzhou 545007 )Abstract: In recent years, with the development of new energy vehicle technology, especially intelligent vehicle technology, great changes have taken place in the field of automotive electronics. The reform of automotive electronics has led to the automobile software development platform and process standards occupy a more important position. In order to ensure the safety and comfort of the vehicle, more electronic control units should be used for the development of the software of the vehicle controller, functional safety and diagnostic module. Based on this, this paper makes an in-depth study of the automo -tive diagnostic software, the open architecture of the platform software, and the means of functional safety assessment. Keywords: New-energy vehicle; VCU; Functional safety; Diagnosis; AUTOSARCLC NO.: U472.9 Document Code: A Article ID: 1671-7988(2019)10-55-03前言近年来,随着智能化新能源汽车技术的发展,汽车电子领域发生了巨大的变化,汽车电子系统日趋复杂,采用的电控元器件也日益增加。
纯电动汽车整车控制系统顶层设计及VCU开发
纯电动汽车整车控制系统顶层设计及VCU 开发作者:林玉鹏来源:《经济技术协作信息》 2018年第13期针对纯电动汽车整车控制系统研发过程中存在的功能划分标准不一、重复开发等问题,本文引入顶层设计的思想,从需求分析、顶层设计指标、功能分解、技术分析和顶层设计决策权衡5个方面阐述顶层设计的主要内容。
同时以顶层设计内容为指导,建立以整车控制器(VCU, Vehicle Control Unit)为核心的分布式整车控制系统架构,并对整车控制器的关键功能进行研究。
最后,以功能分析为基础开发了整车控制器硬件电路和软件程序。
Abstract: In this paper, in order to solve the problems existing in the development process, such as differentstandard for functional division andrepetitive work, the top-level design of pure electric vehicle control system isdeveloped. The main content of the top-level design is divided into five parts: requirements analysis, top-leveldesign specification, functional decomposition, technical analysis and trade-off decision of top-level design.Guided by the content of the top-level design, the distributed vehicle control system with vehiclecontrol unit(VCU) as the core is established and the key functions of VCUare also analyzed. Then, the hardware circuit andsoftware programof VCUis developed on the basis of function analysis.引言节能与新能源汽车,是中国战略性新兴产业之一,也是全球汽车工业研发的热点。
整车控制系统开发及测试方案介绍 (1)
软件看门狗通过主MCU编程直接实现; 硬件看门狗采用maxim公司的MAX705MJA。 R215为0欧姆电阻便于调试; 看门狗喂狗时间为1.6s;
硬件设计实现
二、VCU硬件设计实现 –通信电路设计
CAN收发电路
MCU自带三路CAN控制器,收发器采用NXP公司的CAN收发器芯片 TJA1040T。
16bit
硬件看门狗电路 外扩RAM芯片 RTC定时唤醒模块
5v_AN 5v_CORE 5v_SWITCH
5v_AN1 5v_AN2
传感器及车辆采集部件 (如油门踏板、真空压
力传感器等)
注:
表示电源线路
表示信号线路
5V PWM Driver 12V PWM Driver
LS Driver
HS Driver Dither HS
VCU功能架构到硬件原理架构
硬件设计实现
二、VCU硬件设计实现 – 硬件性能参数需求
主CPU 工作温度 供电电压 极限电压
主要参数要求:
符合汽车级要求,建议采用Freescale32位汽车级芯片体系
-40 ~ 105℃
看门狗
软硬件双看门狗
9~36V
安全模块
16位安全控制器
60V,1min
LIN接口
) 测试
硬件在环测试设备
图片
用途
模拟被控对象的各种工况,包括 工况模拟复杂的故障模式,快速 复现故障模式,将部分测试过程 从传统试验台架中分离,实现多 个控制器的集成测试
整车控制器 14 (VCU)硬件 EOL下线检测
检测设备
用于整车下线时对VCU各个功能 进行检测,保证每辆车中VCU的 功能是完善的可靠的
高于VDD12V时,保护高边芯片L9733不受损坏。
新能源汽车VCU整车控制器实验要求DVP

试验步骤:
1、根据 ISO 16750-2-单线中断规定的方法进行试验。该步骤适用于所有的I/O。对于电源线和地线,中断时长应为15min。
2、连接并运行DUT。断开DUT的连接,然后恢复连接。观察装置断路期间和其后的情况。在DUT系统接口的每条电路分别重复进行。实
验条件如下:
17
开路-单线断线
断开时间:10s±1s
试验名称
试验条件/判断标准
Test Name
试验步骤:
Test conditions / Acceptance Criteria
1、对部件施加Umin
2、相对于部件功率,对典型的I/O模拟装置的电源线施加+1.0 V偏移。
3、对下一个合适的I/O模拟装置重复步骤(2)。
电源偏移
代码丢失。不应出现永久失效的代码。
试验步骤:
1、设置如图11所示的蓄电池电压降曲线。
2、浸润未通电的部件,直至其温度稳定在Tmin。
11
蓄电池电压降
3、部件上电,按照表20变量‘A’的参数绘制蓄电池电压降试验曲线。 4、按照B、C和D,另外重复步骤(3)三次。
5、在Tmax下重复步骤(2)-(4)。参数见附页A11
7
状态变化波形特征
2、在状态变化前、中和后,记录所有输出波形。采用示波器验证输出信号是否完整和部件性能是否正常。 3、对所有可能会发生其他状态变化的部件重复步骤(1)和(2)。
试验标准:
功能状态分类应为Fsc_A。状态瞬变不应损坏下游部件。分析波形时,应考虑意外输出行为和浮动输入。
试验步骤:
1、将部件接在LoadBox上,系统供电电压为12Vdc,将5µH 电感器置于台架试验装置的接地线路上。
纯电动VCU故障诊断策略研究与开发

轻型汽车技术2021(1-2)技术纵横 31纯电动VCU 故障诊断策略研究与开发于海燕孔德胜王子腾王春芳(南京汽车集团有限公司汽车工程研究院)摘 要:基于整车控制开发的实际需求以及人身安全为原则,本文提出了基于纯电动VCU 故障诊断策略研究机制。
介绍了故障诊断的整体方案设计、故障的策 略开发原理以及故障处理的相应原则。
提出一种基于模型的诊断开发框架,一定程 度上缩短了开发周期,同时为具体诊断协议的实现提供了数据支撑。
关键词:故障诊断策略去抖算法故障处理1引言汽车电子控制系统的大量应用,提高了车辆 性能,增加了新功能,同时也产生了新的问题。
电 控系统自身的故障,可能导致汽车失控和不能运行。
从可靠性、安全性和可维护性的角度,汽车电控系统必须具备故障自诊断功能。
纯电动汽车由 于其对安全性能的特殊需求,对于故障诊断的能 力也就相应提高。
VCU 作为电动车上协调与控制部件系统有序运行的“大脑”,它通过判断和搜集相关部件与信息的有效状态,并实时监控与定位 整车控制逻辑与指令,对于异常突发状况,从安全 级别的要求,对相应故障做出响应,并对故障进行解析与相关信息获取。
对电动汽车故障做到提前 识别、及时处理、同时存储和报警.这对提高电动汽车的安全运行具有重大意义,并给电动汽车的 维护和修理工作提供可靠的依据。
2VCU 故障诊断整体方案设计VCU 作为整车控制的核心,其基本思想是处理整车及部件信息,正确解析驾驶意图并协调控制电机、电池及其它附件的工作,同时集成故障诊 断与处理功能,使得整车控制器具备诊断容错能力,VCU 整体控制系统架构如图1所示。
2.1 故障状态检测故障状态检测从属性分类可以分为信号有效图1 VCU控制系统架构32技术纵横轻型汽车技术2021(1-2)网络通信检测模拟信号檢测油门踏板(1\2)制动踏板蓄电池參考电压故障•考电压故隔<SG SB.<X:>、i -)、采*电压故除采囊电&故吗<»■<)<Mi)、2路跆収佶号不成也■白学习故卑比优检劃数字信号检测当前故障状杰梅测数字输入信号划动开关X空SMMttfl«t字输山佶号<SG'.SBOC> >k»a>kSM・M・.*£a««a*a**M控IH逻辑检测故障状态检测故障响应古m断即[1测试失ft状检测本次耳M试失敢检M确的故楡A己■认的A检次J6测试%成检M上次清险试ft楡A4耳M试未检故*出*次.........故障码解析全局冻结檢解析故卑对应快煎解析DID鱗析图2VCU诊断框图性检测、控制逻辑检测、安全功能检测这三大方面。
新能源汽车VCU诊断软件系统开发探索

新能源汽车VCU诊断软件系统开发探索摘要:汽车VCU(VehicleCarUnit)是新能源汽车中的一个关键部件,主要用于实现整车控制系统与动力系统之间的数据通讯和信息交互。
随着新能源汽车技术的快速发展,对VCU功能也提出了更高要求,不仅要求其具有很强的通讯能力和处理能力,而且对软件系统的实时性、可靠性及安全性等也有了更高的要求。
关键词:新能源;VCU诊断软件;开发本文结合VCU诊断软件系统开发的实际经验,首先介绍VCU诊断软件系统开发的背景和意义,然后提出VCU诊断软件系统开发流程,最后以某款新能源汽车为例详细阐述其VCU诊断软件系统开发过程。
本文对于新能源汽车VCU诊断软件系统开发有一定的参考意义。
1.VCU的定义VCU(VehicleControlUnit)是汽车电子控制单元(ElectronicControlUnit,ECU)的缩写,通常由微处理器、存储器、I/O设备等组成。
VCU是整车控制系统中的一个重要组成部分,是连接整车控制器与动力总成(发动机、驱动电机、变速器、电池等)之间的信息交互通道,同时还承担了对动力总成(发动机、变速器等)的控制,主要实现对动力系统相关数据的采集、存储、计算以及执行等功能。
VCU能够实现整车控制器与动力系统之间的信息交互,包括远程诊断信息和控制执行指令,是整车控制系统中数据交换的中枢。
VCU一般由微控制器(MCU)、存储器、I/O设备等组成。
MCU是整个VCU的核心部件,它能在非常苛刻的环境下工作,实现对多种控制算法的开发与优化;存储器用于存储整车控制策略中所需要的数据,同时能够保证在故障情况下正常工作;I/O设备负责VCU与控制器之间数据交换和信息传输。
VCU主要由以下几部分组成:MCU微控制器(MCU)、存储器(包括存储器芯片和SDRAM)、I/O设备(包括A/D转换器)。
VCU包含了一个完整的ECU,能够实现对动力总成相关数据的采集和存储,并将数据传输到动力总成中。
电动汽车整车电子控制器(vcu系统)智能横向泊车服务系统的设计探究
2019年35期设计创新科技创新与应用Technology Innovation and Application电动汽车整车电子控制器(VCU 系统)智能横向泊车服务系统的设计探究冯泽,蒙雪敏,孙振保,陈良,邓春雷,张克智,吴鸿飞(广西理工职业技术学院,广西南宁530000)前言随着经济的发展和国民生活水平的提高,汽车已经成为人们工作、生活不可缺少的工具,但是机动车的快速普及,使得交通堵塞成了全国性大难题。
传统汽车,包括传统石化能源、电池组动力汽车的停泊或转向掉头都需要较大空间,随着私家车拥有的不断增长,停车设施建设相对滞后于车辆的增长速度,停车难的问题日益突出,如停车位紧缺、车位狭窄、前后停车距离短小等,想要把车一次性停好很困难,往往需要反复几次前进后退才能完成,而在此期间容易和旁边车辆发生刮擦碰撞、阻碍交通等问题。
因此,研究其横向泊车电动汽车整车控制器对于现阶段的电动汽车行业的发展来说具有重要的意义。
1智能泊车服务系统设计的意义与市场需求我国在上世纪就有相关规划及技术储备,“863”计划中我国整车控制器主要是以高校为依托进行研究,如清华大学、同济大学、北京理工大学等,上世纪主要停留在技术探索和积累阶段。
目前已掌握了整车控制器的软、硬件开发能力。
产品功能较为完备,可以满足电动汽车需求,目前已经大量应用到电动汽车产品上。
目前各主流厂家基本掌握整车控制器开发技术,但不同企业技术积累存在差异,水平参差不齐。
一般大型品牌车企业均有自己的整车控制核心技术,同时也实现产品的更新换代,不断提升性能满足电动汽车的需求。
加之随着私家车拥有的不断增长,停车设施建设相对滞后于车辆的增长速度,停车难的问题日益突出,以及传统石化能源、电池组动力汽车带来的尾气,环境污染问题,横向泊车电动汽车具有良好的市场发展前景,同时还可带动横向泊车整车控制器的发展。
2智能泊车服务系统设计的必要性、紧迫性横向泊车电动汽车改变了传统车辆对停泊入位或转向掉头对空间较大要求的弊端,可在更小空间内轻松实现车辆泊车入位或调头转向,且可实现横向平行移动。
整车控制器(VCU)策略及开发流程
整车控制器(VCU)策略及开发流程一、VCU的作用与功能在电动汽车中,VCU是核心控制部件,它根据加速踏板位置、档位、制动踏板力等驾驶员的操作意图和蓄电池的荷电状态计算出运行所需要的电机输出转矩等参数,从而协调各个动力部件的运动,保障电动汽车的正常行驶。
此外,可通过行车充电和制动能量的回收等实现较高的能量效率。
在完成能量和动力控制部分控制的同时,VCU还可以与智能化的车身系统一起控制车上的用电设备,以保证驾驶的及时性和安全性。
因此,VCU的设计直接影响着汽车的动力性、经济性、可靠性和其他性能。
1、VCU主要功能1)整车能量分配及优化管理;根据驾驶员的具体操作和实际工况对车辆进行管理、优化及调整,以实现优化能量供给,延长车辆使用寿命,提高车辆运行经济性。
2)故障处理及诊断功能;对出现的异常情况进行诊断、提示和主动修复工作。
3)系统状态仪表显示;4)整车设备管理监控各设备运行状态,及时进行动态调整。
5)系统控制根据既定的操控程序对驾驶员的各项操作进行及时响应,实时与数据库进行比对,对各节点进行动态控制。
二、VCU的结构VCU为纯电动汽车的调度控制中心,负责与车辆其他部件进行通信,协调整车的运行。
VCU系统结构,如下图所示。
其主要包含电源电路、开关量输入/输出模块、模拟量输入模块及CAN通讯模块。
1)电源模块从车载12V蓄电池取电,开关量输入模块接收的信号主要有钥匙信号、挡位信号、制动开关信号等;2)开关量输出信号主要是控制继电器,其在不同整车系统中意义略有不同,一般情况下控制如水泵继电器及PTC继电器等;3)模拟量输入模块采集加速踏板和制动踏板开度信号及蓄电池电压信号等;4)CAN模块负责与整车其他设备通信,主要设备有电机控制器(MCU)、电池管理系统(BMS)及充电机等。
三、整车通信网络管理整车系统通过CAN通信网络将各个子控制系统连接在一起。
整车系统通讯网络结构如下图所示。
VCU起到协调管理整个通信网络的功能,是各个子设备的通信服务端。