MultiScan 雷达使用常见问题解析.ppt
解决探测问题-1

解决探测问题-1要是你的哈斯加工中心在探测的过程中,主轴上的探头在不停的闪着蓝色和绿色的灯光,你会怎么做?首先想到的,当然是换电池。
探头上的(LTC)电池和我们通常见到的普通电池不一样。
普通电池(5号/7号)是随着使用时间而消耗,使用过一段时间后,电压会降低,直到降为0V。
探头内的电池的消耗方式非常独特,它的电压会一直维持在一个特定的值(3.6V),然后电压急剧下降,降为0V,结束电池的生命。
为了保证探头的使用安全,探头会持续的对电池进行监测,一旦电池的电流或者电压无法达到设定值,探头就会通过灯光闪烁告知用户及时的更换电池。
绿色和蓝色的灯交替闪烁代表着电池即将无法正常使用,绿色、蓝色、红色的灯交替闪烁代表电池已经无法使用。
除此之外,哈斯的控制系统也会发出警报“ 电池电量低”在更换电池的时候,最好在电池上写上安装的日期,因为虽然LTC 电池的保质期为10年,但电池一旦装进探头,探头会消耗电池的一部分电量,根据雷尼绍的推荐,待机的状态下,主轴探头里的电池最多使用250天;工作台上的刀具探头最多使用310天。
换电池的时候,手指不要触碰到探针,因为这样可能会让探头认为已经进入了设置模式,需要继续的校准才能正常使用。
如果不小心碰到了探针,或者由于一些其他的原因不得不重新校准,记得先清除全局变量,按照顺序一步一步的操作。
全局变量里储存着探测到的各种数据,错误的数据会让系统做出错误的反馈。
所以,必须按照步骤进行!如果由于某种特殊的原因,探测的宏程序已经破坏或者已经被删除,你可以到哈斯的官网下载新的探测宏程序。
/zh.html在下面的视频里,你可以看到在不同的配置下,下载版本的区别。
请记住:“当你听到马蹄声的时候,首先想到的是马,而不是斑马!”校准的过程可以参考下面的视频:。
CINRAD/SC型多普勒天气雷达常见故障及检修

CINRAD/SC型多普勒天气雷达常见故障及检修CINRAD/SC 型多普勒天气雷达具有探测降水,台风,暴雨,飑线,冰雹等气象目标的功能。
可以及时、准确、连续的探测半径500 公里范围内目标物的强度变化和移动路径。
它主要由天线馈线系统、发射系统、接收系统、伺服系统、配电系统等几部分组成。
本文分析了CINRAD/SC 新一代天气雷达的接收系统的基本工作原理,在此基础上对近几年出现的故障进行分析,并给出了故障排除方法,为今后新一代天气雷达的维护维修提供参考。
标签:CINRAD/SC型多普勒天气雷达;常见故障;维修检测引言:气象观测是气象服务的基础,观测业务是气象现代化、自动化和科技化的重要组成部分,随着气象和业务的发展,气象观测越来越趋向自动化。
多普勒效应是澳大利亚物理学家从运动着的发声源中发现的现象,多普勒天气雷达的工作原理即以多普勒效益为基础,当降水粒子相对雷达发射波束相对运动时,可以测定接收信号与发射信号的高频频率之间存在的差异,从而得出所需的信息。
运用这种原理,可以测定散射体相对于雷达的速度,在一定条件下反演出大气风场、气流垂直速度的分布以及湍流情况等。
这对研究降水的形成,分析中小尺度天气系统,警戒强对流天气等具有重要意义。
CINRAD/SC型多普勒天气雷达工作过程中难免会出现各式各样的故障,因此气象部门需要加强CINRAD/SC型多普勒天气雷达的日常维护以及管理工作,保证观测质量。
1.CINRAD/SC 型多普勒天气雷达常特点1.1总体特点CINRAD/SC 型多普勒天气雷达全相参多普勒天气雷达技术体制,具备很强的探测能力,地杂波抑制能力-50dbB,具有很高的频率稳定性,引用WSR-88D、CINRAD/SA雷达天线体扫描(VCP)模式设计以及移用WSR-88D、CINRAD/SA 雷达的全套RDA软件,雷达在线校准标定功能和机内测试和监控功能,数据质量控制技术,雷达可靠性高,可实现遥控和连续不间断运行。
Multi-Scan 雷达使用常见问题解析33页

Azimuth Resolution
(due to beam width)
Beam Characteristics Summary
The best weather definition occurs within 80 NM of the aircraft. Beyond 80 NM, the radar should be used for flight path planning purposes, not for
Captain's Window
First Officer’s Window
海洋地区反射率较低
MultiScan
Traditional Radar
Bright Band
机载雷达系统两个重要特征
MULTI-SCAN雷达两个重要特性:
1. 零温度线以上的自动温度增益补偿 2. 全球气象模型数据库的补偿
WRT-2100多波束雷达使用上下两个扫描波束, 雷达发出的单个波束为3.5发散角的圆锥体。
雷达波束特征
10 Nm 3,500 ft
50 Nm 17,500 ft
100 Nm 35,000 ft
200 Nm 70,000 ft
波束宽度计算公式: Beam Width (in feet) = (Distance in Nm + “00”) x 3.5
4. Independently Controlled Clutter-Free Displays
As the radar beam moves higher in the thunderstorm,reflectivity decreases
观察雷雨一定要观察雷雨的下部(根部),扫描雷雨的中上部位会造成回 波弱的现象;但为了避免扫到过多的地面杂波影响对雷雨的观察,需要 上调到一个折衷的俯仰角矛盾:既要观察雷雨的下部,又要避免产生过 多的地面杂波,多波束雷达提供了解决方案
多普勒天气雷达的故障维修及日常维护李彦军

多普勒天气雷达的故障维修及日常维护李彦军发布时间:2021-06-10T14:50:58.070Z 来源:《探索科学》2021年4月作者:李彦军[导读] 随着全球气候变暖现象不断加剧,各种极端灾害性天气频繁出现,对气象预报工作提出了更高的要求。
在对天气、气候进行监测的过程中,离不开多普勒天气雷达的支撑,因该设备具有检测和预警功能,气象部门可以及时获取到反馈的气象信息。
西藏林芝市气象局李彦军 860000摘要:随着全球气候变暖现象不断加剧,各种极端灾害性天气频繁出现,对气象预报工作提出了更高的要求。
在对天气、气候进行监测的过程中,离不开多普勒天气雷达的支撑,因该设备具有检测和预警功能,气象部门可以及时获取到反馈的气象信息。
本文在简要概述多普勒天气雷达的基础上,针对多普勒天气雷达的故障问题,给出了相关的维修办法,最后则探讨了多普勒天气雷达日常维护,以确保多普勒天气雷达可以持续稳定运行,不断提升气象服务质量。
关键词:多普勒天气雷达故障维修日常维护引言随着科学技术水平的提升,我国对多普勒天气雷达的研究不断深入,并逐渐成为我国开展天气预测的重要工具。
因多普勒天气雷达需要长期不间断运行,受到环境、人为、设备自身等因素的影响,极易引发故障问题,对气象监测的准确性产生影响,不利于气象工作的正常开展。
因此,将多普勒天气雷达的故障维修和日常维护工作做好显得刻不容缓。
1、多普勒天气雷达概述多普勒天气雷达是将无线电技术、计算机应用技术和信息处理技术进行结合的相干雷达,可以探测和监督天气情况。
作为一种高性能的数字雷达,多普勒天气雷达是对多普勒效应的广泛应用,也是科学技术水平进步的重要体现。
自气象系统中引入多普勒天气雷达以来,在方便人们日常生产生活的同时,也为多普勒效应的应用提供了研究范例。
多普勒天气雷达主要包括触发信号发生器、调制解调器、发射机、天线转换开关、天线、接收机、信号处理器、数据处理和显示终端。
其工作原理是雷达在发射固定频率的脉冲波开展对空扫描,一旦遇到活动目标,返回的波段频率与发射波段频率之间会出现差异,这种差异称之为多普勒频率。
737机型关于MultiScan(多重扫描)气象雷达的操作通告

飞行操作技术信息通告Flight Operations Information Bulletin中国东方航空股份有限公司飞行技术管理部Flight Technical Department China Eastern Airlines Co., Ltd.编号:737-201112编写:孙杰关于MultiScan(多重扫描)气象雷达的操作通告适用机型:B737NG编写依据:BOEING COMMERCIAL AIRPLANES FOTBATA NO: 34 - 43生效日期:2011年12月10日737机队飞行人员:根据波音公司飞行技术操作通告(ATA NO: 34 - 43),对适用于737NG等波音机队的Rockwell Collins MultiScanTM气象雷达,就人工和自动方式操作的不同之处进行了描述。
因东航机队中部分737NG飞机的选型中涉及该型号的气象雷达,为进一步提高气象雷达使用的效率,现将该通告进行了翻译和整理,以便为本机队人员提供操作建议和参考,主要内容如下:1、有关知识背景风暴的雷达反射效应可以划分为三个层级。
风暴三层中低于结冰层的最底层完全由水组成,是风暴三层中反射效应最明显的一层。
因此,风暴底层的气象雷达回波最强。
中间层由过冷水滴及冰晶组成,由于冰晶对雷达的反射较为不良,该层反射效应不明显。
风暴三层中的顶层完全由冰晶组成(雷达反射效应较差),在雷达上难以探测到。
在对流天气附近低于冰点的温度,飞机会遇到由细小冰晶高度集聚而形成的可见水汽。
另外,风暴形成过程中,在风暴可见部分以上会形成湍流区。
2、气象雷达使用介绍气象雷达面板(典型)Rockwell Collins MultiScanTM气象雷达可以按人工(Manual)和自动(AUTO)方式操作:人工方式下,MultiScanTM气象雷达可以如传统气象雷达一样完全控制倾角及增益设置。
自动方式下,MultiScanTM 气象雷达用以显示远至320海里的天气状况同时清除地面杂波。
[word doc]L波段雷达探空实际操作中常见问题及处理方法探讨
![[word doc]L波段雷达探空实际操作中常见问题及处理方法探讨](https://img.taocdn.com/s3/m/d51e36a3a6c30c2259019ea3.png)
L波段雷达探空实际操作中常见问题及处理方法探讨2010年增刊第34卷贵州气象JournalOfGuizhouMeteorologyV oL.34Supplement则,督促各级学校多方筹集资金,加快学校防雷设施的整改步伐.涪陵区所有学校防雷设施的全面整改,所需资金较大,应通过多渠道解决或分期分批重点解决.教育部门应积极向区政府申请防雷专项整改资金,积极整改.同时教育部门也可根据情况先自筹垫付资金,先行整改,后财政资金划拨后进行补贴.6.2认真维护防雷设施,积极申报防雷年检学校作为人员密集场所,各级各类学校应在雷雨季节前开展一次维护排查,建立雷电隐患台账.教育部门应强制要求各级各类学校在汛期来临前,主动向区防雷中心申请年检.防雷中心应重点检测学校内的办公楼,教学楼,校舍的直击雷防护装置,是否存在断裂,腐蚀,倒伏,接地电阻变大等情况.现场认真排查隐患,并当场填写整改意见书, 限期整改完毕.6.3加强防雷安全科普知识及法律法规知识宣传每年在科技下乡,3月23气象日,法制宣传日, 5.12防灾减灾日及安全宣传月发放防雷科普宣传资料,深入学校举办防雷讲座,将防雷安全的法律法规,雷电防护知识,雷灾事例作为宣传,讲解的主要内容.通过宣传讲解提高全区师生的防雷意识, 特别是农村中,小学.6.4抓好制度建设,认真完善,制订防雷安全责任制认真完善,制订防雷安全工作责任制,明确学校领导的防雷安全职责,明确防雷工作日常维护, 年检申报,雷灾申报等工作流程.制定防雷安全应急预案,开展防雷应急演练,提高学校对突发事件的处置能力,搞好雷击事故的应急处置,确保我区学校师生的生命财产安全.文章编号:1003—6598(2010)增刊一0203—03L波段雷达探空实际操作中常见问题及处理方法探讨张倚晨,张银廷,谭炳全(重庆市沙坪坝区气象局,重庆沙坪坝400030)摘要:通过对L波段雷达探空业务操作中需重点注意的易错环节进行分析,并根据具体情况指出错误原因和提出处理方法.关键词:L波段雷达;探空观测;注意事项中图分类号:P406文献标识码:B1引言L波段探空系统是我国自主研制的新一代探空系统,它由二次测风雷达和GTSI型数字电子探空仪配合探测,能够对从地面至30Km大气层的气压,温度,湿度,风向,风速5个气象要素进行综合探测,也可以进行风向和风速的单独探测.它具有探测精度高,采样速率快,使用方便等特点,实现了高空气象探测仪器的数字化和自动化,为气象预报和气候研究提供基础的气象资料,服务于国家的经济,国防建设和人民生活的需求.为确保高空探测数据的准确,使L波段雷达探空系统更好地发挥其作用,应在日常工作中注意以下事项.7结束语2放球前的准备工作学校属于人员密集场所,防雷工作必须引起高度重视,应从以下几方面来落实其防雷工作:①认真调查各学校防雷设施现状.②分析存在的问题及原因.③根据地方财力提出可行的整改方案,分期分批进行整改.④对已有防雷设施加强日常维护及年检.⑤建立健全防雷安全责任制,建立雷电灾害应急预案,建立雷电预警信息接受终端.参考文献[1]梅卫群,等.建筑防雷工程与设计[M].北京:气象出版社,2004.2.1探空仪,雷达状态的检查探空仪经过长途运输和存放,其机械和电路部分可能出现松脱,锈蚀和脏污等现象,所以在放球前要对其进行仔细全面的检查和维护.取出待放探空仪,检查盒盖部分支架上的温度传感器(即热敏电阻)及连接丝有无断裂现象,检查发射板,智能转换板及盒盖部分各焊点有无虚焊,漏焊现象,检查发射板与智能转换板连接处有无接触不实现象.放球前40min,运行”放球软件”,依次打开雷达收稿日期:2010—09—10第一作者简介:张倚晨(1986一),女,助工,主要从事高空气象探测工作.?203?2010年增刊第34卷贵州气象Journ~OfGm~ouMeteorologyV oL34Supp~ment的总电源开关,驱动箱电源开关,示波器电源开关, 发射高压开关,并根据指示灯检查雷达,发射机的运行是否正常,检查驱动箱上A(仰角),E(方位角) 绿指示灯是否亮起.放球前10min,将装配好的探空仪悬挂于室外放球点处(探空仪距地高度不超过4m)后,立即回到控制室检查探空仪回答信号,并调节雷达频率使其达到最佳.具体操作步聚是,打开摄像头,将雷达天线手动对准探空仪方向,置小发射机按钮于开启状态,在示波器距离显示模式下检查是否存在回波凹口.若存在回波凹口,表示探空仪回答器正常工作,此时,切换到示波器角度显示模式下,调节雷达频率和增益,使四条亮线平齐,以亮线顶端出现”火柴头”这一特征为最好,调节后, 再次切换到示波器距离显示模式下,此时回波凹口应位于竖线中央.若进过初步检查和频率调节后, 仍然没有出现回波凹口,则应该更换探空仪,重新进行基测后再施放.需要补充的是,在放球过程中,由于频率发生漂移,地物干扰等情况造成信号减弱,导致回波凹口不能自动跟踪,即回波凹口偏离竖线中央,此时, 应及时调整频率并按动距离增大/减小按钮进行手动跟踪,使回波凹口再次回到竖线中央.2.2电池的浸泡GTS1数字探空仪使用的电池为注水镁氯化亚铜电池,使用前需要在氯化钠溶液里进行浸泡处理.其浸泡涉及氯化钠溶液的浓度,浸泡时间及水温.冬季气温低,浸泡电池的水温可以高些,通常在60℃左右,氯化钠溶液浓度在5%左右,时间在5 ~6min.夏季气温高,水温通常掌握在45℃左右,氯化钠溶液浓度则在3%左右,浸泡时间5min为佳,电池的电压一般在17~20V即可.用这种方法浸泡出的电池,电压稳定,波动幅度较小.需要注意的是,浸泡电池的时间要严格控制,若时间过短, 电极板之间部分因没有与溶液充分接触而导致电压低,功率小,若时间过长,则电池容易发生短路. 2.3探空仪湿度感应元件的老化探空仪湿敏电阻片(简称湿度片)是一个二次特性感应元件,其测湿原理采用电阻值与湿度的比对方式,即湿度片的一个电阻值对应一个湿度值, 但电阻值除了受相对湿度的影响外,还受到温度的影响,并随时间变化有所漂移,所以在使用前要对其基点进行确定(湿度为0%时适度片的电阻值). 基点进行确定时应将其置人基测箱读取基准温度和基极电阻R..特别注意的是,,.的变化对相对湿度影响很大,若读取不准确,则会造成整份.204.记录的系统性误差,影响探测的准确性.在读取,R之前,要将湿度片置入基测箱的高湿,低湿瓶中进行老化.老化时,首先要注意湿度片两侧的电极与高湿瓶,低湿瓶插槽两个接触点的接触是否良好,其次,老化时间要充分,在南方低湿的情况下,即使,看上去已经趋于稳定,也还是应老化足够3rain.2.4雷雨天气的注意事项GTS1型数字探空仪在雷雨大风天气情况下施放时,易因为被雷电击中,内部进水等造成信号消失至使探测终止无法获得正常的高空资料,甚至造成本次探测的记录全部缺测.同时,暴露的感应元件被雨水淋湿失去特性后则会导致探测资料无法使用.因此,遇雷雨天气时在放球前采取相应措施,有效预防探空仪信号的突失十分必要.GTS1型数字探空仪内部是由发射板和智能板相连接,并通过智能板上的插口连接电池和温,湿传感器,从外观上看,探空仪纸盒盖凹陷,两边各有一条小缝,保温盒与盒盖之间也有缝隙.雷雨天气时,当探空仪经过对流层,受到气流的强烈震荡和雨水的冲击后,容易造成各连接和插口处松动引起发射板或智能板断路;同时,雨水很容易通过纸盒缝隙处渗人到保温盒内,引起发射板或智能板短路.以上两种现象都会导致探空仪信号的突失,所以,在雷雨天气装配探空仪时,应保证发射板和智能板连接紧密,电池和温,湿感应器插口牢固,并用透明胶带把保温盒和盒盖之间的缝隙粘紧.同时,GTSI型数字探空仪的湿度感应元件(即湿度片)是裸露在外的,顶部只有一个盒盖遮挡.在雷雨天气放球过程中,湿度片很容易因沾上雨水而导致探测到的湿度数据出现漂移,跳变等情况. 为了避免湿度片溅上雨水,应尽量减少施放前在室外暴露的时间,尽可能将探空仪挂在装配亭的背风处,并可采取适当遮挡处理.若雨太大,可适当推迟放球时间,等雨小后再放.还应注意的是,雷雨天气气球的升速相对较慢,若气球的升速过慢,其在对流层受颠簸的时间就会长,信号突失的概率就增大,若升速较快仪器便能很快穿过对流层,便可以减少或避免低空信号突失.因而在雷雨天气下充灌氢气的净举力要视情况比平常多.3放球中易出现的问题3.1放球瞬间丢球的处理气球出手后,放球人员应迅速回到雷达天线2010年增刊第34卷张云,等:L波段雷达探空实际操作中常见问题及处理方法探讨V oL.34Supp~ment处,观察雷达天线是否自动跟踪气球,若发现雷达天线跟踪不正确,即瞬间丢球,此时应立即通过对讲机指挥微机操作员手动抓球.微机操作员应迅速将天控开关转为手动状态,根据放球人员给予的气球位置指示,摇动天线控制手柄追踪气球.待确定雷达天线对准气球后(即示波器四条亮线平齐),还应调节频率,使之为最佳.随后,将天控开关转为自动跟踪状态,并在示波器距离显示模式下,调整距离按钮,使凹口回波回到竖线中央.3.2探空乱码的删除探测过程中,温,压,湿数据有时会出现一些乱码飞点,首先应选择”自动修改温,压,湿曲线”功能.若此功能仍不能纠正乱码,则应放大温,压,湿曲线,手动选定一点或一段飞点处,双击鼠标左键删除,尽量使得探测曲线平滑有规律.3.3测风斜距不正常的处理在探测过程中,会因雷达,探空仪问题使得示波器上的凹口变弱或者消失,造成斜距不准确,应根据不同的情况采取不同的处理方法:①若探测过程中,发现测风斜距不正常且错误数据太多时,在”数据处理软件”中点击”探空数据处理”菜单,选择”文件属性”,此时出现”处理参数选择”框,选择”无斜距测风”,将所有的雷达斜距转换为探空高度计算.②若只有少量的测风斜距不正常时,可在”放球软件”的”球坐标曲线”状态,选择鼠标右键的”探空高度替换斜距”来替换不正常的测风斜距.3.4雷达天线卡死雷达天线仰角和方位角数据精确到小数点后两位,正常情况下天线转动时这些数据每时每刻都发生变化,但在雷达经过长期使用未及时清洗的情况下,容易使雷达上用于数据传输的汇流环因积灰过多而导致雷达天线卡死.因此,如果发现”放球软件”控制区显示的仰角数据突然不再变化,而且雷达故障A(仰角)报警指示灯闪烁并显示”help”字样时,即为雷达天线卡死…,此时要果断的关闭雷达驱动箱的电源,过几秒钟后再重启.有些时候观测的过程中雷达天线的仰角或方位角也会无缘无故的卡死,如果不能及时发现则会造成测风记录的仰角数据或方位角数据一段时问都不变化的错误. 这就要求值班员一刻也不能疏忽,时刻监视电脑屏幕,注意观察仰角和方位角的变化,遇到异常情况果断采取处置措施.3.5重放球的判定雷达探测中,如遇温,压,湿的可用探测数据未达500hPa(或高度不足5500m)并且放球时间不足10min的情况或者温,压,湿探测数据其中之一连续性缺测(或者可信度低)的情况都应重新放球进行探测.特别需要注意的是,重放球应在正点放球后75rain内进行,若超过时限,可不进行重放球.近地层出现高空风缺测,如晴空或云高3Km以上,记录未达3Km等情况时,也必须重放球.4其他注意事项①在放球前,调入或修改探空仪参数并确定后,必须再次对参数特别是对输入或修改项进行校对,以免造成不合格仪器的施放.②如放球过程中误碰了”放球”开关,应在软件弹出的的询问对话框中点击”取消”按钮,否则,实际接收的探测数据将出现错误.③放球过程中,”放球软件”和”数据处理软件”同时启用时,若在”数据处理软件”中做了某些修改,而未在”放球软件”中做此修改时,则”放球软件”数据存盘时将会把”数据处理软件”中的修改覆盖.④遇重放球,应先退出”放球软件”,然后依次关闭雷达主控箱发射高压开关,雷达驱动箱开关, 主控箱总开关,之后再依次开启主控箱总开关,雷达驱动箱开关,发射高压开关进行重启,并运行”放球软件”才能进行下一次的放球工作.否则,下一次的放球工作将无法正常进行.5结论L波段雷达探空技术日渐成熟,在气象探测,气象预报中发挥的作用也日渐凸显.利用L波段雷达进行高空探测时,各种不同的突发状况时有发生,若处理不及时或者处理不恰当,都会造成探空数据的不准确甚至不可用.因此,全面总结各种可能影响探测质量的情况,并掌握处理方法,在放球前认真做好准备工作,放球中严密监视并及时处理突发状况,可提高探测中温,压,湿数据的准确率和精度,有效减少或避免数据误差,使L波段雷达在气象事业中发挥更积极的作用.参考文献[1]L波段(1型)高空气象探测系统业务操作手册,中国气象局监测网络司,2005.?2O5?。
Multi-Scan 雷达使用常见问题解析

40 NM
200 NM
300 NM
100 NM
雷达系统探测对象
雷达依靠探测雷雨中含水(降雨)量的多少来 工作的,回波与雨量成正比;
NOTE:
雷达无法探测雪,雾,含水率低的云,干性湍 流, 闪电, 无法区分冰雹与降雨的差别
Rain
Dry Snow
Wet Hail
Dry Hail
Multi-Scan 雷达使用常见问题解析
Multi-Scan 雷达使用
常见问题解析
Multi-Scan 雷达使用常见问题解析
内容目录: 一、机载雷达系统工作原理简介 二、机载雷达系统两个重要特征 三、机组使用中常见问题解析 四、小结
一 机载雷达系统工作原理简介
我司机队安装的气象雷达系统为ROCKWELL COLLINS公司生 产的WRT-2100型号的多波束扫描雷达。 WRT-2100多波束雷达使用上下两个扫描波束,雷达发出的 单个波束为3.5发散角的圆锥体。
4. Independently Controlled Clutter-Free Displays
优化俯仰调节角度
As the radar beam moves higher in the thunderstorm,reflectivity decreases
观察雷雨一定要观察雷雨的下部(根部),扫描雷雨的中上部位会造成回 波弱的现象;但为了避免扫到过多的地面杂波影响对雷雨的观察,需要 上调到一个折衷的俯仰角矛盾:既要观察雷雨的下部,又要避免产生过 多的地面杂波,多波束雷达提供了解决方案
2.自动模式地面杂波多
Manual
First Sweep
Second Sweep
Third Sweep
常见雷达故障分析与维修方法

常见雷达故障分析与维修方法摘要:伴随近几年我国信息化技术的不断发展,有关雷达探测方面的交互式故障应急响应平台也应运而生,通过该平台使用的运行体系,不仅能全面掌握系统的实际运行情况,还能确保各项特性顺利完成。
雷达在运行过程中,开始阶段的故障问题会频繁出现,然后伴随相关保障能力的提升,以及机械部件之间的有效磨合,能有效确保雷达运行的稳定性。
但还需要相关人员能对雷达常见故障展开深入分析,并以此为依据,提出有效的雷达故障维修方法,从而确保雷达的稳定运行。
关键词:雷达;故障因素;维修方法;分析引言雷达作为机载航电系统最重要的目标探测传感器,是载机作战任务执行力得以保证的、最为重要的环节之一,是载机作战任务执行的关键设备。
本文针对某型机执行靶试任务过程中发生的雷达系统故障进行分析,并对新设备的使用维护提出自己的看法以及对相应的设计提出改进建议1维修雷达故障时应遵循的原则一般情况下,维修工作的开展前提是先观察故障,主要通过询问相关人员进行了解故障现象,然后在通过仔细观察和外部检查等方式,针对雷达不同分机的显示、测量等展开全面观察,最终结合相关工作原理,明确各个部分的电路作用,进而确定故障出现的原因及其故障部位。
基于此,维修人员要想全面了解故障,就需要做好研究工作,除了要询问相关工作人员了解的情况以外,还应当运用直觉法,通过调节相关旋钮的方式,观察故障变化现象,从而了解故障问题。
但是在维修过程中,应当遵循以下几点原则:其一,由大到小。
已经明确故障部位后,应根据自身掌握的情况,依照雷达组成框图,把故障问题缩小范围,并从整个雷达缩小到某个系统,然后在从系统中缩小至某一支路,在从某一支路缩小至某一级,在缩小至具体的故障点;其二,由外到内。
在充分了解故障现象之后,应当分析故障现象的起因,将遵循由外到内的原则,开始分析雷达出现故障的地方。
针对雷达而言,其电缆和分机插座等作为外部,内部为分机;针对分机而言,其面板上的开关和保险丝等作为外部,内部为元件。
直升机多普勒导航雷达失锁故障的分析与排除

航空航天科学技术科技创新导报 Science and Technology Innovation Herald2DOI:10.16660/ki.1674-098X.2018.35.002直升机多普勒导航雷达失锁故障的分析与排除郎需义 陆明明 李明巧(哈尔滨飞机工业集团有限责任公司 黑龙江哈尔滨 150066)摘 要:多普勒导航雷达在地面通电过程中,发生雷达锁定几分钟后失锁的故障,这起故障是由机上电缆接线错误,引起导航计算机接收的姿态信号错误,并判断姿态数据超出雷达正常工作对直升机姿态范围的要求后,禁止雷达工作,同时报雷达失锁的告警提示。
通过对该起故障的排查、分析以及解决,为以后迅速排除同类故障积累了经验,提供了帮助。
关键词:多普勒导航 雷达 失锁 锁定 直升机中图分类号:V249 文献标识码:A 文章编号:1674-098X(2018)12(b)-0002-02直升机多普勒导航雷达(以下简称雷达)是利用多普勒效应测量直升机飞行速度的机载导航雷达,是实现无线电导航的一种自备式导航设备。
与卫星天线、导航计算机等组成自主式多普勒导航系统。
多普勒导航系统是根据雷达测出的载机相对地面的三轴向速度,以及载机上其它系统提供的真空速、航向、姿态、高度等数据,由导航计算机计算出直升机的当前位置、待飞距离、待飞时间、偏航距、风速和风向等等一系列导航参数,可根据需要,显示在导航计算机显示屏上,并与自动飞行控制系统交联完成按预定航线的自动飞行。
本文就一起雷达失锁故障进行分析排查,希望能够给一线工作者提供参考。
1 故障现象在雷达配合自动飞行控制系统进行地面通电检查时发现,通电3~4min后,自动飞行控制系统接收雷达输出的三轴向速度数据中断。
检查发现雷达失锁,此时导航计算机告警提示页面报雷达失效提示。
雷达失锁后一直不能再次锁定,多普勒导航系统重新加电后雷达仍然失锁。
2 分析与排除根据故障现象,初步判断故障原因如下:(1)接触不良。
雷达物位计常见故障及处理方法

雷达物位计常见故障及处理方法1. 异常报警在使用雷达物位计时,有时候会出现异常报警的情况。
这时需要及时检查处理。
以下是常见异常报警的解决方案。
1.1. 接收器错误有可能出现雷达物位计显示无任何数据,这时候有可能存在接收器错误。
可以采用以下的步骤进行解决:1.通电检查:检查雷达物位计是否通电正常。
2.电缆检查:检查雷达物位计与接收器的电缆连接是否正常。
3.距离检查:检查雷达物位计与接收器的距离是否符合规定的范围。
1.2. 信号错误有时候也会出现雷达物位计信号错误的情况。
这时应该采取以下的解决方案:1.电缆检查:检查雷达物位计与接收器的电缆连接是否正常。
2.雷达罩检查:检查雷达罩是否被物体或灰尘遮挡。
3.转子检查:检查雷达物位计转子是否正常。
2. 显示故障在雷达物位计运行时,有可能出现无法正常显示的问题。
以下是常见的显示故障及对应处理方法。
2.1. 显示黑屏雷达物位计屏幕出现黑屏时,可能是以下问题导致的:1.电源故障:检查雷达物位计是否有电,是否通电正常。
2.背光故障:检查背光是否正常。
3.屏幕故障:检查雷达物位计屏幕是否有零部件或线路出现故障。
2.2. 其他显示问题除了黑屏之外,还可能会出现无法正常显示、显示不清晰等问题。
这时,需要:1.调整方位:检查雷达物位计是否摆放在正确的位置,并调整方向。
2.检查连接:检查雷达物位计与接收器的连接是否正常稳定。
3.清洗物位计:清洗雷达物位计罩、转子等部件,确保无灰尘和杂物。
3. 硬件故障雷达物位计在长期使用过程中,也有可能出现硬件故障。
以下是常见的硬件故障处理方法。
3.1. 电源故障雷达物位计出现电源故障时,一般是电源适配器损坏或电源故障等导致。
这时,需要更改适配器或维修电源部件。
3.2. 传感器故障雷达物位计传感器故障通常是由于传感器受损等原因而引起。
此时,可以采用以下解决方案:1.更换新传感器:更换新传感器以代替故障的传感器。
2.修理故障传感器:对传感器进行修理,以恢复其正常工作。
L波段雷达常见故障分析及解决方法

L波段雷达常见故障分析及解决方法摘要:L波段二次测风雷达是一种体制较新、自动化程度较高的新型雷达。
其新型的探测系统实现了探测数据采集、监测和集成的自动化,提高了高空气象资料的质量和精度,但在运行中故障时有发生,本文通过实际工作中遇到的雷达故障现象进行分析,归纳总结了故障解决方法。
关键字:L波段雷达; 故障分析; 解决方法Abstract: The L band two wind detecting radar is a system of newer, higher degree of automation of the new radar. The novel detection system to achieve the detection data acquisition, monitoring and integrated automation, improves the high altitude meteorological data quality and precision, but the operation fault occurs, the actual work in radar fault phenomenon analysis, summarizes the fault solution.Key words: L band radar; fault analysis; solution method高空气象观测系统是综合气象观测系统的重要组成部分,是我国气象业务现代化建设的主要任务之一。
随着高空气象观测业务的发展,我国常规高空观测技术体制已完成从59-701雷达探空系统向L波段雷达探空系统的过渡。
到目前为止,我国已建设完成120部L波段雷达探空系统。
该系统不仅提高了我国高空气象观测业务质量和观测精度,提高了观测信息的空间与时间密度,而且实现了观测数据采集、监测和集成的自动化,在天气预报、人工影响天气以及气候预测等方面发挥着重要的作用,为了充分发挥雷达的性能,延长雷达的使用寿命,现把实际工作中遇到的雷达故障现象进行分析并归纳总结了故障解决方法,同时对维修过程中的注意事项作了说明。
新飞机雷达 multiscan
自动模式的图象
如何理解气象(雷雨)的强烈与危险
目前气象雷达以探测雷雨中降水为介质显示气象目标
传统雷达(或人工模式)设置不同的俯仰会产生不同的图象 哪个图象能够代表雷雨的强烈程度?(见右图)
雷雨是一个综合的气象目标,其包含
降水 可能的强烈的上升及下降气流(对流活动) 对流活动及降雨带来的附产物,冰雹 颠簸及闪电等 雨量的探测体现无法全方面的反映气象目标的危险性与强烈
•新形成的对流式降水含水率低, 但闪电气流活动可能比较频繁 •大面积层云降雨由于雨量较大及亮带作用会产生很红的回波,但其气 流稳定,少有闪电,危险性较低.
气象目标的含水反射率随 季节于地域变化很大
•北方干燥雷雨反射率低, 但气流猛烈,很危险 •Multiscan目前的全球气 象模型数据库目的是解决 此类问题
2)
所以,自动模式的目的是体现雷雨反射体最强的图象,并去除地面杂 波,而人工方式为照哪看哪,需人工调高波束角度,避免引入地面杂波
雷雨不同高度由于含水差异造成反射率的差别
1ost Wx Detection
Best Clutter Rejection
2o i
1o h
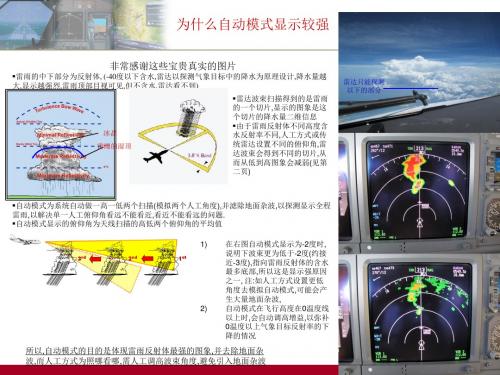
为什么自动模式显示较强
非常感谢这些宝贵真实的图片
雷雨的中下部分为反射体, (-40度以下含水,雷达以探测气象目标中的降水为原理设计,降水量越 大,显示越强烈,雷雨顶部目视可见,但不含水,雷达看不到) 雷达波束扫描得到的是雷雨 的一个切片,显示的图象是这 个切片的降水量二维信息 由于雷雨反射体不同高度含 水反射率不同,人工方式或传 统雷达设置不同的俯仰角,雷 达波束会得到不同的切片,从 而从低到高图象会减弱(见第 二页)
雷达只能探测 以下的部分
意大利雷达部分问题总结解答

培训会客户遗留问题汇总1.隧道验收时,在不破坏隧道结构情况下,怎么校准波速?可以查找能看得见钢筋的地方,通过钢筋实际厚度和检测厚度来校准。
或是隧道口和隧道内部衬砌厚度相同情况下,通过检测厚度和实际厚度对比来校准。
2.在采集长距离数据时,如何保证图上距离和实际距离相符,提高距离精度?在采集长距离数据时,可以事先在检测面上做好标记,10米或者50米甚至几百米做一个标记,在采集过程中通过标记校准距离。
还可以每1公里或2公里保存一次数据,然后继续采集,这样每次只需要停几秒钟,就可以得到比较准确的距离数据,处理时也比较快。
3.如何在雷达图中设置桩号?这个功能会在新版本的软件中实现。
4.实际测量信号没有典型病害信号那么明显,怎么办?实际检测中,由于干扰信号的原因病害信号不是十分明显,一个是需要积累使用经验,因为雷达图谱的判断是需要经验的,大量的实测经验会帮助您更好的判断。
另外一个,可以换几种滤波参数设置来进行滤波,滤波是一个很重要的手段,合适的滤波范围,能显示更清楚的信号。
5.浅层钢筋对深层缺陷的影响,何如分辨?孙方勇讲过?6.对隧道竣工验收时,雷达贴二衬表面和离开二衬表面进行检测,有区别吗?如何保证长、大隧道采集信号的稳定性?保持稳定的话,贴着二衬表面和离开二衬表面检测没有太大区别,如果一开始贴着测,途中隔空这样是有影响的,需要保持雷达天线和二衬表面的状态以保持信号稳定。
7.相同的数据,不同人不同参数分析的结果不同,人为因素对分析数据的影响是否很大?相同的数据,不同人不同参数情况下,分析的结果会有很小出入,一些参数下处理的结果比较明显,一些情况下结果可能不太明显。
但结果差别很大的时候,应该是某个人判断错了或者两人都判断错了,人为因素对分析数据影响较大,因为雷达数据分析需要经验,经验提高了,影响就不大了。
8.雨污探测是探测的是管的位置还是渗流过程?主要探测的是管的位置,渗流过程可以通过渗流区域的异常反射来判断。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
距离越远,波束越宽,雷达分辨雷雨细 节的能力越差
建议80nm以内对目标进行分析,80nm 以外的显示主要作为确认目标的位置与 存在及进行飞行计划
上下扫描波束
WRT-2100多波束雷达使用上下两个扫描波束。 两个波束的俯仰角由系统根据飞机的高度和地形自动设置,从而最佳的扫描雷雨的中下部(
4. Independently Controlled Clutter-Free Displays
As the radar beam moves higher in the thunderstorm,reflectivity decreases
观察雷雨一定要观察雷雨的下部(根部),扫描雷雨的中上部位会造成回 波弱的现象;但为了避免扫到过多的地面杂波影响对雷雨的观察,需要 上调到一个折衷的俯仰角矛盾:既要观察雷雨的下部,又要避免产生过 多的地面杂波,多波束雷达提供了解决方案
NOTE: 雷达波束扫描到的气象信息全部储存在 雷达里,但在ND上只显示影响飞机飞行 航路的雷雨信息。
只显示影响飞行航路的气象信息
300 NM
Attenuation Alert
所有的气象情况都在存储器里面,只显示影响飞行航路的雷雨
200 NM
Ground Clutter Free 100 NM
OverFlight Protection
WRT-2100多波束雷达使用上下两个扫描波束,雷达发出的 单个波束为3.5发散角的圆锥体。
WRT-2100多波束雷达使用上下两个扫描波束, 雷达发出的单个波束为3.5发散角的圆锥体。
雷达波束特征
10 Nm 3,500 ft
50 Nm 17,500 ft
100 Nm 35,000 ft
200 Nm 70,000 ft
Multi-Scan 雷达使用常见问题解析
内容目录: 一、机载雷达系统工作原理简介 二、机载雷达系统两个重要特征 三、机组使用中常见问题解析 四、小结
1.零温度线以上的自动温度增益补偿
1、基于温度的补偿: 基于温度的增益补偿相当于增加了雷雨的反射顶,使雷达能够看到雷雨更高的部分
Bright Band
2. Scan Memories Store Radar Scan Data - Compensate For Aircraft Motion
3. Digital Processing Merges Scan Data Per Pilot Command - Eliminates Ground Clutter
波束宽度计算公式: Beam Width (in feet) = (Distance in Nm + “00”) x 3.5
Beam Width (50 Nm) = 17,500 ft
300 Nm 105,000 ft
距飞机越近,波束越窄,扫到雷雨的切面越薄,采集的信息点越多,显示雷雨的分辨率越好 距飞机越远,波束越宽,更容易扫到雷雨,但雷雨的分辨率差
40 NM
40 NM Turbulence
200 NM 300 NM
100 NM
40 NM
Rain Dry Snow Wet Hail Dry Hail
雷达系统探测对象
雷达依靠探测雷雨中含水(降雨)量的多少来 工作的,回波与雨量成正比;
NOTE: 雷达无法探测雪,雾,含水率低的云,干性湍 流, 闪电, 无法区分冰雹与降雨的差别
优化俯仰调节角度
实际 雷雨 威胁 高度
雷达能探测到 的雷雨顶部
多波束雷达图像处理过程:
雷达图像处理过程
多波束自动扫描不同角度空 间以获得全方位气象数据
自动存储大量数字化气 象信息和地面回波
全球气象模型数据库补偿 零温度线上的温度补偿
自动地面杂波抑制
全自动操作模式操作,0-320 海里无地面杂波显示
海洋地区反射率较低
MultiScan
Traditional Radar
Bright Band
机载雷达系统两个重要特征
MULTI-SCAN雷达两个重要特性:
1. 零温度线以上的自动温度增益补偿 2. 全球气象模型数据库的补偿
☆:MULTI-SCAN雷达的这两个重要属性,决定了在雷达的正常 使用中,只需将增益设置在“CAL”位即可。
零温度线以上的自动温度增益补偿相当于 增加了雷雨的可视高度
2.全球气象模型数据库的补偿
2、全球气象模型数据库补偿: 雷雨的含水反射率随地域及季节会产生很大的变化, 雷达系统自身装载的全球气象 模型数据库自动补偿因季节、地域等造成的反射率差异,如陆地和海洋的差别。
Captain's WWindow
Multi-Scan 雷达使用 常见问题解析
Multi-Scan 雷达使用常见问题解析
内容目录: 一、机载雷达系统工作原理简介 二、机载雷达系统两个重要特征 三、机组使用中常见问题解析 四、小结
一 机载雷达系统工作原理简介
我司机队安装的气象雷达系统为ROCKWELL COLLINS公司生 产的WRT-2100型号的多波束扫描雷达。
雷达波束特征
Range Resolution
(due to pulse width)
Azimuth Resolution
(due to beam width)
Beam Characteristics Summary
The best weather definition occurs within 80 NM of the aircraft. Beyond 80 NM, the radar should be used for flight path planning purposes, not for
强反射率部位),起飞时两个波束向上看(上波束5.7度,下波束之高4.3度,显示为5度),随着 飞机高度的增加,两个波束逐渐下俯,显示器上显示的为两个波束俯仰角的平均值.
1. Radar Scans Full Environment ( Long and Short Ranges) Continually Updates Scan Memories. Short and long range information taken from different beams