摆臂式机器人
四轴机械手参数介绍

• XTM4摆臂式4轴机械手机械参数:
• • • • • • • • • • • • • • • • • J1轴(上下运动Z轴)采用滚珠丝杆+线性导轨+高速高分辨率伺服马达 J2轴(摆臂旋转A轴)采用谐波减速机+高速高分辨率伺服马达 J3轴(前后伸缩X轴)采用滚珠丝杆+线性导轨+高速高分辨率伺服马达 J4轴(末端旋转B轴)采用行星减速机+高速高分辨率伺服马达 上下运动Z轴行程: 450MM 摆臂旋转A轴旋转角度:300° 前后伸缩X轴行程:600MM 末端旋转B轴旋转角度:360° 摆臂活动半径:1400MM 前后伸缩X轴最高速度:0.8M/S 上下运动Z轴最高速度:1.0M/S 摆臂旋转A轴最高速度:225°/S 末端旋转B轴最高旋转速度:900°/S 标准最大负载:6KG ( 可订做最大负载:16KG ) 输出法兰到地面高:950MM(可根据现场要求定) 重复定位精度: ±0.08MM 安装方式:落地式
机械手安装方式:
1.地脚安装孔
2.末端旋转B轴输出安装法兰
机械手3视图:ຫໍສະໝຸດ 四轴机械手小型装配机器人中,“四轴机器人”是指“选 择性装配关节机器臂”,即四轴机器人的手臂 部分可以在一个几何平面内自由移动。四轴机 器人的前两个关节可以在水平面上左右自由旋 转。第三个关节由一个称为羽毛(quill)的金 属杆和夹持器组成。该金属杆可以在垂直平面 内向上和向下移动或围绕其垂直轴旋转,但不 能倾斜。
4摆臂式4轴机械手参数介绍
鑫台铭制
产品用途
• • • • • 1.此5轴机械手主要用于冲压行业冲床、冲压件自动上下料。 2.此5轴机械手可用于油压机自动上下料。 3. 此5轴机械手可用于车床自动上下料。 4.此5轴机械手可用于铣床自动上下料。 5.此5轴机械手还可以用于一些代替人的搬运。
分析履带机器人越障能力优化

0引言越来越多的行业开始应用履带机器人,减轻人力劳动的压力,提高工作效率。
履带机器人在实际工作中,需要铺设较长的电缆,设置大范围电磁屏蔽,遇到各种障碍,为履带机器人工作带来难题。
如部分地下电缆检查中,履带机器人工作期间频繁遇到障碍,如果不能很好地解决其越障能力,会威胁到履带机器人的工作安全。
越障能力的优化,涉及到机器人结构性能、设计参数以及越障性能等内容,因此在研究上具有一定难度,是当前履带机器人创新的重要课题。
根据履带式摆臂机器人展开越障能力优化研究,为履带机器人越障能力提升以及未来发展提出科学建议。
1剖析履带式摆臂机器人结构履带式摆臂机器人,主要包括气体检测装置、控制电路、驱动电机、关节摇臂、履带移动式底盘、可控制云台、传感系统、前后驱动轮、移动壳体、电源系统、摄像系统等。
履带机器人实际工作中必须及时进行气体检测,及时统计工作环境的温度、湿度与气体等参数变化,所以摆臂必须做到全方位移动[1]。
带动检测摄像机随时对周围环境加以探查,并且能够灵活转换检测角度。
履带式摆臂机器人工作环境复杂,特别是在电缆检查工作中,会面临爬楼梯、越过不同障碍区等现象,基本结果设计中增加履带前角,加强设计结构紧凑性,分别设置两个直流电机模块,强化防水能力,更好的完成涉水环境下的工作。
机器人主要材料为铝合金,总重量仅为13kg。
整体结构为全封闭式,两侧驱动轮分别属于两个电机,以此做到电缆检测中不同方向的不同检测运行状态。
面对电缆检测中的障碍区,通过前臂及时越过[2]。
2履带摆臂机器人运行原理分析优化履带摆臂机器人越障性能,必须掌握履带摆臂机器人在工作中的运行状态以及运动原理。
从水平面运动、制定越障路径等方面展开研究。
2.1机器人水平运行原理机器人正常工作以水平运动为主,水平运动中,履带机器人正常工作中关节履带、水平地面不会出现过度滑动现象,这期间履带机器人的运行速度为0,并且履带机器人速度、轮轴中心速度始终保持一致[3]。
六履带摆臂式搜救机器人的设计

摘要本文首先介绍了近年来我国煤矿生产中发生的安全事故和造成的人员伤亡情况,阐述了研发煤矿救灾机器人的重要性和紧迫性。
在对多种移动机器人的结构形式进行分析的基础上,设计了一种六履带式摆臂行走方案。
其次,本文研究了六履带摆臂式搜救机器人在不同环境下的机身姿态与行进步态,给出了六履带摆臂式搜救机器人的运动分析结果,探讨了几种典型的变形摆臂方式,通过对其行走机构的分析,设计计算了主驱动轴,传动锥齿轮及从动轮等,使其功能更能有效的体现。
然后,根据机器人的驱动要求,设计了硬件电路,系统采用PLC控制模式,可以依据需求扩展各功能模块。
最后,我们验证了本文设计的六履带摆臂式搜救机器人可以在井下复杂环境中实现爬“阶梯”,越“台阶”,翻越障碍、跨越壕沟等自适应非结构地形的能力。
关键词:安全事故;六履带摆臂;搜救机器人; PLC控制ABSTRACTThis paper introduces the recent occurrence of coal mine production safety accidents and casualties, with a description of the development of coal mine rescue robot importance and urgency.In the structure of various forms of mobile robot based on the analysis, design a program of six walking arm tracked.Second, this study tracked six search and rescue robot arm type of body posture in different environments and road gait, gives the six track the movement of the robot arm-type search results, the deformation of a typical pendulumArm way through its travel agency analysis, design and calculation of the main drive shaft, the drive bevel gear and driven wheels, so that it functions more effectively reflected.Then, according to the robot-driven requirements, design the hardware circuit, the system uses PLC control mode, can be based on the function module needs expand.Finally, we verify the design of the six-track search and rescue robot arm type complex environment can be achieved in the underground climb the "ladder", the more "step" over the barrier, across ditches and other non-structural terrain adaptive capacity.Keywords:Accident; Six Track Arm; Search and rescue robot; PLC control目录1 绪论 (1)1.1引言 (1)1.2 选题的背景和意义 (2)1.3六履带摆臂式搜救机器人研究现状及发展趋势 (4)1.3.1六履带摆臂式搜救机器人的研究现状 (4)1.3.2六履带摆臂式搜救机器人的发展趋势 (7)1.3.3六履带摆臂式搜救机器人的运动特性 (7)1.4课题研究内容及意义 (9)1.4.1课题研究的主要内容 (9)1.4.2课题研究的目的与意义 (10)1.4.3煤矿救灾机器人的功能参数 (10)2 六履带摆臂式搜救机器人的总体机构设计 (11)2.1六履带摆臂式搜救机器人的机械设计概述...... 错误!未定义书签。
爬楼机器人

摘要摆臂式爬楼机器人是一种能够在多种特殊地形上进行作业的移动式机器人。
它属于作业机器人的一种,可以将人从危险的工作中解脱出来,是当前机器人领域研究的热点之一。
本文通过对国内外各种类型爬楼机器人现状进行了系统的分析与比较,论述了爬楼机器人的运动方式、控制系统等。
首先介绍了国内外爬楼机器人研究现状,阐明本课题研究的目的、意义。
然后进一步介绍了本爬楼机器人总体结构。
本文在此基础上,设计了抓扶手支架机械手,着重阐述了爬楼机器人夹持机械手主要问题及其解决方法,并对关键部件进行设计和分析。
关键词: 爬楼机器人履带机械手AbstractThe wall climbing robot of hook claw is a climbing robot can worked at height on the vertical wall of mobile service robots. It belongs to a robot of limit, Will work from the dangerous freed, currently, it is one of the hotspots where the field of robotics research. Based on the current situation at home and abroad to conduct various types of wall-climbing robot system for analysis and comparison, discusses the wall climbing robot of hook claw’s mode, adsorption and control systems. Firstly, it is introduce that Research to the climbing robot at home and abroad, clarify the purpose of the research, significance. And then further describes the overall structure of the wall-climbing robot, meanwhile it is also asked to design reasonable and efficient of crawling device, and in this basis, it is focused on the main problems and solutions for climbing robot control system, the robot's control system must be simple, safe, reliable, efficient, and convenient.Keywords: wall-climbing robot; hook claw; rough wall; Development目录摘要 (I)Abstract (II)目录 ....................................................................................................................... I II 第1章绪论 (1)1.1 本文研究的目的及意义 (1)1.2 国内外爬壁机器人的发展现状和趋势 (2)1.3 爬楼机器人的相关技术 (3)1.4 研究内容及研究方法 (4)1.4.1 研究内容 (4)1.4.2 研究方法 (4)第2章摆臂式爬楼机器人系统方案构成与设计 (5)2.1 机器人系统方案 (5)2.1.1 机器人移动载体机构设计 (5)2.1.2 行走模块 (5)2.2 机器人履带的选择 (6)2.2.1 车体模块选择 (7)2.2.2 动力装置的设计 (8)2.3 爬楼机器人的控制系统 (8)2.3.1 系统控制 (9)2.3.2 系统控制总体结构 (9)2.4 本章小结 (10)第3章机器人履带和气动机械手设计 (11)3.1 履带式机械行驶原理 (11)3.1.1 行驶原理 (11)3.1.2 履带的基本结构和参数 (12)3.2 机械手手部的设计计算 (13)3.2.1 手部设计基本要求 (18)3.2.2 选择手抓的类型及夹紧装置................................ 错误!未定义书签。
工业机器人典型应用—码垛应用站—码垛站工艺原理

系统多配有自动更换托盘功能,主要应对于多 条生产线的中等产量或低等产量的码垛。
两进两出
四进四出
第四部分
码垛机器人作业示教
4 码垛机器人作业示教
TCP确定
吸附式手爪,其TCP一般设在法兰中心线与吸盘所在平面交点的连线上并延 伸一段距离,距离的长短依据吸附场料高度确定。
4 码垛机器人作业示教
集中式码垛
码垛机器人被集中安装在某一区域,可将所有 生产线集中在一起,集中操作,具有较高的输 送线成本,节省生产区域资源,节约人员维护。
全面式码垛 集中式码垛
3 码垛站布局
工位布局
工业机器人码垛工作站是一台或多台机器人,配以相应的周边辅助设备,用于 完成码垛特定工序作业的独立生产系统,是基本的机器人工作单元。
一进两出
在一进一出的基础上添加输出托盘,一侧满盘信号 输入,机器人不会停止等待直接码垛另一侧,解决 更换托盘等待时间,码垛效率明显提高。
一进一出
一进两出
3 码垛站布局
工位布局
两进两出
两进两出是两条输送链输入,两条码垛输出, 多数两进两出系统不会需要人工干预,码垛机 器人自动定位摆放托盘,该系统是目前应用最 多的一种码垛形式,也是性价比最高的一种规 划形式。
码垛工作站按码垛进出情况,常见规划有一进一出、一进两出、两进两出和四 进四出等四种工位布局形式。
3 码垛站布局
工位布局
一进一出
一进一出是一条输送链输入,一条码垛输出。常 出现在厂源相对较小、码垛线生产比较繁忙的情况, 此类型码垛速度较快,托盘分布在机器人左侧或右 侧,缺点是需人工换托盘,浪费时间。
码垛机器人是码垛工作站的核心设备,其结构简单,可以依附现场环境和生产线要求来 设置,不仅可以充分利用工作环境的空间,而且提高了物料的搬运能力,大大节约了码 垛过程中的作业时间,提高了码垛效率。
工业机器人定义

7.吸附式分为气吸附和磁吸附;气吸附利用吸盘鱼大气压之间压差工作,分为:真空吸盘吸附、气流负压气吸附、挤压排气负气压吸附等
8.磁吸附:分为电磁吸盘、永磁吸盘、电永磁吸盘
9.电磁吸盘:在内部激磁线圈通直流电产生磁力,吸附导磁性工件
10.永磁吸盘:利用磁力线通路的连续性及磁场叠加性工作,通过磁系之间的相互运动控制工作磁极面上的磁场强度,进而实现工件的吸附和释放动作
4.工业机器人应用:机器人搬运、码垛、焊接、涂装、装配
第二章
1.三大核心零部件:伺服电动机、减速器、控制系统
2.第一代工业机器人组成:操作机、控制器、示教器:第二、三代还包括:感知系统、分析决策系统,分别由传感器及软件实现
*3.操作机(机器人本体):是工业机器人的机械主体,用来完成各种作业的执行机构。主要由:机械臂、驱动装置、传动单元、内部传感器等组成
11.电永磁吸附:利用永磁磁铁产生磁力,利用激磁线圈对吸力大小进行控制,达到“开、关”作用12.常见手爪前端6表5-4
13.搬运机器人工作站采用:L型、环型、“品”字、“一”字等布局
第六章
1.码垛机器人的末端执行器是夹持物品移动的一种装置,常见形式:吸附式、夹板式、抓取式、组合式2.夹板式:常见的夹板式有单板式和双板式。主要用于整箱或规则盒码垛,需要单独机构控制,工作状态下爪钩与侧板成90度,起到承托物件防止脱落作用。
8.手动操纵工业机器人:是通过手动操控示教器上的机器人运动轴按键,将机器人在某一或某几个坐标系下移动到某个位置的方法。一般采用点动、连续移动实现;点动:主要用在离目标较近场合;连续移动:用在离目标较远场合
第四章
*1.示教基本工作原理:示教---再现;示教:也称导引,由操作者直接或间接导引机器人,一步步按实际作业要求告知机器人应该完成的动作和作业的具体内容,机器人在引导过程中以程序的形式将其记忆下来,并存储在机器人控制装置内;再现:是通过存储内容的回放,使机器人能在一定精度范围之内按照程序展现所示教的动作和赋予的作业内容
四履带搜救机器人机械结构设计摆臂设计

摘要本论文研究工作的目的是设计结构新颖、具有独创性的可携带、抗一定冲击的履带移动机器人,以能够适应在恶劣环境和复杂路况下工作。
通过在移动系统上加载不同的探测传感设备,能够实现搜救机器人不同的使用功能,本研究意义在于为后续设计的搜救机器人提供一个基础的动力平台,以便于能够开发出更多使用功能的搜救机器人。
本研究所设计的搜救机器人移动方案是履带式驱动结构。
该方案采用模块化设计,便于拆卸维修,可以适应不同情况的复杂路面,并可主动控制两侧肋板的转动来调节机器人姿态变化,辅助爬坡、越障和跨沟;机器人经过合理的结构布局和设计后具有良好的环境适应能力、机动能力。
本论文所设计主的机器人移动机构主要由四部分组成:主动轮减速驱动机构、肋板转动机构、摆臂减速器机构、履带及履带轮运动机构。
关键字:搜救机器人;摆臂,履带式减速器AbstractThe purpose of this thesis is to design novel structure, its u nique portable,shoc-k intelligently tracked mobile robot, in order to be able to adapt to the harsh environment and the complicate d road to work.Mobile systems loaded by different mo-ules, sear ch and rescue robots can be achieved using different functions, t his studyis important because other people's search and rescue ro bot designed to provide a basis for the dynamic platform to facil itate greater use of features can developsear-ch and rescue robots.This resoarch is moving search and rescue robot crawler.The program is modular in design, easy disassembly maintenance, can be complex adaptive sub-surface, active control can turn on bot h sides of flange module to adjust the robot pose changes, supp orting climbing,obstacle and cross-channel.The design of the robo t moving mechanism mainly consists of four components. Active wheel reducer drive mechanism, flange rotation institutions, adap tive road implementing agencies, sports organizations track and tr ack wheels.Key words:search and rescue robots; swing arm;crawler; Retarder;目录前言 (3)1 绪论 (7)1.1课题研究背景及意义 (7)1.1.1 课题研究背景 (7)1.1.2 课题研究意义 (8)1.2国内外的研究概况 (9)1.2.1 国外研究现状 (9)1.2.2 国内研究现状 (14)1.2.3 搜救机器人的技术发展方向 (17)2 搜救机器人的移动机构分析 (21)2.1井下复杂环境对搜救机器人的要求 (21)2.2移动机构方案论证分析 (22)2.2.1 轮式移动机构特点 (22)2.2.2 腿式移动机构特点 (23)2.2.3 履带式移动机构特点 (24)2.2.4 履、腿式移动机构特点 (25)2.2.5 轮、履、腿式移动机构性能比较 (26)2.3 本研究采用的行走机构 (26)2.4 救灾机器人性能指标与设计 (27)2.5 本章小结 (28)3 搜救机器人运动参数设分析计算 (29)3.1 机器人越障分析 (29)3.1.1 机器人跨越台阶 (30)3.1.2 机器人刮越沟壑 (32)3.2 斜坡运动分析 (33)3.3 本章小结 (34)4 摆臂减速去设计 (35)4.1 摆臂电机选择 (35)4.2 摆臂减速器设计 (35)4.2.1 减速器方案对比分析 (35)4.2.2 减速器应满足要求 (37)4.3 摆臂减速器设计计算 (37)4.3.1 摆臂减速器的参数计算 (37)4.3.2 摆臂减速器的齿轮计算 (39)4.3.3 轴的设计 (43)4.4 本章小结 (47)5 履带的设计计算 (49)5.1 带的选择 (49)5.2 计算带的型号和节距 (50)5.3 计算主从动轮直径 (51)5.4 本章小结 (52)6 摆臂结构设计 (53)6.1 摆臂作用 (54)6.2 肋板部分设计 (56)6.3 摆臂参数计算 (58)7 总结与展望 (59)致谢 (61)参考文献 (62)前言我国的煤炭资源十分丰富,是世界上最大的煤炭生产国和消费国。
排爆机器人介绍

防爆机器人产品特点:
1. 越障能力强,鳍臂式履带结构,使机器人翻越楼梯、沟 壑等障碍。 2. 运动速度快,相当于人小跑速度,无级变速,低速状态 下同样具备较大扭矩。 3. 体积小、重量轻,可单人背负,可放入轿车后备箱内, 运输方便。 4. 一体化机械臂云台,5+2自由度设计,抓取、观察灵活。 5. 模块化设计,电池模块、云台模块、机械臂模块可快拆 卸、更换,方便维护。
THANKS
山东卡特智能机器人有限公司
2020
防爆机器人
kate08
目录
CONTENTS
01
防爆机器人产品简介:
02
防爆机器人产品特点:03防爆机器人应用来自境:防爆机器人产品简介:
防爆机器人是一款小型模块化排爆机器人,主要可用于危险物品抓取、转移、销毁等作业,同时 机器人手臂具有七个自由度,活动灵活,亦可用于狭小空间侦察作业。机器人行走模块采用"鳍臂 式"履带结构,使机器人具备了强的越障能力,可适应沙地、瓦砾、草地等多种复杂地形。机器人 结构坚固、轻巧,防尘、防水、防震、防腐蚀,各项性能指标均达到标准要求。
防爆机器人主要参数:
防爆机器人主要参数: 结构形式:摆臂+轮式+履带三合一结构,适合多种地形, 大臂:采用双电动撑杆升降,角度:0-90度 可伸缩臂:采用悬浮丝杠结构,伸缩范围:0-45cm往复运动。 小臂:采用涡轮自锁结构,0-180度转动。 机械爪:三轴,360度连续旋转。 腰转系统:腰盘直径150毫米,转动角度左60度,右90度。 轮子:带快释放的气动轮胎(轮胎尺寸10.0”/25.0cm)。据需要可与驱动系统脱离。 照明:前后各采用一组发光二极管灯照明(一组肆个)。 电源:24V快换直流电池组(两组12V,14A/h安时电池)。 充电器:110或220交流变24V直流。
四摆臂履带式搜索机器人行走机构设计

四摆臂履带式搜索机器人行走机构设计
四摆臂履带式搜索机器人行走机构是一种新型的机器人行走系统,其行走机构主要由四摆臂和履带组成。
具体的设计方案如下:
1. 四摆臂设计
四摆臂作为机器人的行走支撑系统,需要具备较好的稳定性和抗震性。
设计方案中,四摆臂的杆件采用铝合金材料,具有良好的强度和刚度,并且重量较轻。
通过对杆件的优化设计,使得四摆臂的重心与机器人的中心保持一致,可以使得机器人在行走过程中具备更好的稳定性。
2. 履带设计
履带是机器人行走的关键部件之一,需要能够适应各种地形,同时具备较好的抗磨损性和承载能力。
设计方案中,采用橡胶履带作为机器人的行走轮胎,其具有良好的耐磨性和抗滑性能。
同时,增加了履带的支撑点,可以增加其承载能力,使得机器人可以在不同的地形上顺利行走。
3. 驱动系统设计
机器人的驱动系统主要由直流电机、减速器、液压缸等组成。
设计方案中,驱动系统可以实现对机器人履带的前进和后退控制,从而保证机器人在行走过程中的稳定性和控制性。
综上所述,四摆臂履带式搜索机器人行走机构设计方案,通过对四摆臂和履带的优化设计,保证了机器人的稳定性和控制性,同时可以适应各种地形的行走。
《上下料机械手的结构设计》开题报告2300字

[10]冯琳清, 张延迟, 赵晨, et al. 基于S7-200PLC的气动机械手电气传动系统[J]. 智慧工厂, 2017(6):57-61.
日期: 年 月 日
国内机械手的起步之晚可想而知,当下国内机械手的精度水平以及机械手工作时的稳定性都不如国外产品,并且在机械手的控制软件的使用上也较大依赖国外的软件。不过国产机械手价格低,同时能够完成对于精度要求不高的工作任务。这使得国内的机械手可以解决国内一部分的工厂生产任务。一开始国内生产的机械手并不能满足生产车间的需求,有过很多失败的例子,但慢慢地,人们不断从失败中汲取教训,机械手的运作水平有了显著提高。
二、课题设计的目的
随着社会的进步和发展,科技的日益进步,产品更新换代加快,使用专机或人工进行机床上下料就暴露出了很多的不足和弱点,一方面专机占地面积大结构复杂、维修不便,不利于自动化流水线的生产;另一方面,它的柔性不够,难以适应日益加快的变化,不利于产品结构的调整;其次,使用人工会造成劳动强度的增加,容易产生工伤事故,效率也比较低下,且使用人工上下料的产品质量的稳定性不够,不能满足大批量生产的需求。基于此,本文根据实际工作,针对客户需求,设计了一种自动上下料机械手,用于工厂生产制造中的上下料,其主要设计过程如下:根据实际工作情况,对上下料过程进行深入研究,确定了本次设计的上下料机械手的工作原理,从而拟定两种设计方案,再根据现有机器情况,最终确定该机械手的设计方案。结合工人现场对物料上下料情况,确立机械手的自动上下料系统。并对机械标准零件通过计算和校核,进行型号的选择。并设计辅助工装,实现精准上下料,提高了上下料效果。
第二阶段(第 2 周):撰写开题报告,外文翻译;
摆臂轮式机器人越障过程建模及仿真

21 年 6 02 月
机
电
工
程
V 1 9 No6 o .2 .
J un lo c a ia o r a fMe h nc l& Elcr a gn eig e t c lEn ie r i n
Jn 0 ห้องสมุดไป่ตู้ u .2 1
摆臂轮式机器人越障过程建模及仿真水
与定 量 分析 。 针 对 城 市 灾 难 现 场 搜 救 问 题 , 研 究 对 机 器 人 本 越 障机 理 进 行 分 析 , 设 计 相 应 的 可 分 离 式 机 器 人 并 组 合 结 构 。为 增 加 其 越 障 能 力 , 机 器 人 前 部 添 加 在 可 30 回转 的 摆 臂 , 部 添 加 优 化 机 器 人 主 体 长 度 6 ̄ 后
Ab t a t n o d r t o v h r b e t a n t e d s se i fct i i n te s o e s n t ne n o ma y n ro p c , n s r c :I r e o s le t e p o l m h ti h ia tr st o i t s o a y f r a p r o o e tr i t n a r w s a e a d e y, ma e f l u e o e e o o s t o d c , e r h a d r s u ,t e d t c a l o o t cu e wa e in d f sl , n h r c s f k u l s fwh d d r b t o c n u t s ac n e c e h ea h b e r b tsr t r s d sg e r t a d t e p o e s o u i y
分拣设备的种类
分拣设备的种类分拣设备是现代物流仓储中不可或缺的一环,通过自动化技术和智能算法,能够高效准确地将物品分拣出来。
分拣设备的种类繁多,下面将介绍几种常见的分拣设备。
一、传送带式分拣设备传送带式分拣设备是最常见的一种,它通过传送带将物品从起始点输送到目标点。
在传送带上,设有分拣口和传感器,通过传感器检测到物品后,控制分拣口的开合,从而将物品分拣到相应的目标位置。
传送带式分拣设备适用于物品形状规则、重量适中的场景,例如快递、包裹等。
二、滑坡式分拣设备滑坡式分拣设备是一种利用重力加速物品下滑的原理进行分拣的设备。
它通过设置不同角度的滑坡,使物品沿着滑坡下滑到相应的目标位置。
滑坡式分拣设备适用于物品重量较轻、形状规则的场景,例如信件、小件商品等。
三、机械臂式分拣设备机械臂式分拣设备是一种利用机械臂进行分拣的设备。
机械臂具有多个关节,可以模拟人的手臂动作,通过夹爪或吸盘等工具抓取物品并放置到目标位置。
机械臂式分拣设备适用于物品形状、重量复杂多样的场景,例如服装、电子产品等。
四、摆臂式分拣设备摆臂式分拣设备是一种利用摆臂进行分拣的设备。
摆臂具有一定的摆动范围,在摆动过程中,通过夹爪或吸盘等工具抓取物品并放置到目标位置。
摆臂式分拣设备适用于物品分拣速度要求较高、场地狭小的场景,例如快速分拣线、电子仓库等。
五、输送机器人式分拣设备输送机器人式分拣设备是一种利用自动导航机器人进行分拣的设备。
机器人通过内置的导航系统,可以自主移动并定位到目标位置,通过夹爪或吸盘等工具抓取物品并放置到目标位置。
输送机器人式分拣设备适用于多品种、小批量的物品分拣场景,例如电商仓储、零售分拣中心等。
六、视觉识别式分拣设备视觉识别式分拣设备是一种利用摄像头和图像识别技术进行分拣的设备。
通过摄像头对物品进行拍照,并通过图像识别算法判断物品的属性和目标位置,控制分拣口的开合,将物品分拣到相应的目标位置。
视觉识别式分拣设备适用于物品形状复杂、需要高精度分拣的场景,例如食品加工、药品分装等。
搬运机器人

•鎼繍鏈哄櫒浜?/span>•鍒嗙被锛氶緳闂ㄥ紡銆佹偓鑷傚紡銆佷晶澹佸紡銆佹憜鑷傚紡銆佸叧鑺傚紡•榫欓棬寮忥細•X銆乊銆乑杞寸粍鎴愶紝澶氶噰鐢ㄦā鍧楀寲缁撴瀯锛屽彲渚濇嵁璐熻浇浣嶇疆銆佸ぇ灏忕瓑瀵瑰簲閫夋嫨鐩寸嚎杩愬姩鍗曞厓鍙婄粍鍚堢粨鏋勫舰寮忥紙鍦ㄧЩ鍔ㄨ酱涓婃坊鍔犳棆杞酱渚垮彲鎴愪负4鎴?杞存満鍣ㄤ汉锛?/span>•缁撴瀯褰㈠紡鍐冲畾璐熻浇鑳藉姏锛屽彲瀹炵幇澶х墿鏂欍€侀噸鍚ㄤ綅鎼繍锛岄噰鐢ㄧ洿瑙掑潗鏍囩郴锛岀紪绋嬫柟渚垮揩鎹凤紝骞挎硾搴旂敤浜庣敓浜х嚎杞繍鍙婃満搴婁笂涓嬫枡绛夊ぇ鎵归噺鐢熶骇杩囩▼•鎮噦寮?/span>•涓昏鏈塜/Y/Z杞寸粍鎴愶紝涔熷彲闅忎笉鍚岀殑搴旂敤閲囧彇鐩稿簲鐨勭粨鏋勫舰寮忥紙鍦╖杞翠笅绔坊鍔犳棆杞垨鎽嗗姩鍙欢浼告垚4鎴?杞存満鍣ㄤ汉锛?/span>•鎮噦寮忔満鍣ㄤ汉澶氭暟缁撴瀯涓篫杞撮殢Y杞寸Щ鍔紝浣嗘湁鏃堕拡瀵圭壒瀹氱殑鍦哄悎锛孻杞翠篃鍙湪Z杞翠笅鏂癸紝鏂逛究杩涘叆璁惧鍐呴儴杩涜鎼繍浣滀笟锛屽箍娉涘簲鐢ㄤ簬鍗у紡鏈哄簥銆佺珛浣撴満搴婂強鐗瑰畾鏈哄簥鍐呴儴鍜屽啿鍘嬫満鐑鐞嗘満搴婄殑鑷姩涓婁笅鏂?/span>•渚у寮?/span>•鐢盭銆乊銆乑杞寸粍鎴愶紝涔熷彲闅忎笉鍚屽簲鐢ㄩ噰鍙栫浉搴旂殑缁撴瀯褰㈠紡(鍦╖杞翠笅绔坊鍔犳棆杞垨鎽嗗姩灏卞彲浠ュ欢浼告垚4鎴?杞存満鍣ㄤ汉锛?/span>•涓撲笟鎬у己銆佷富瑕佸簲鐢ㄤ簬绔嬩綋搴撶被锛屽妗f鐨勮嚜鍔ㄥ瓨鍙栥€佸叏鑷姩閾惰淇濈绠卞瓨鍙栫郴缁?/span>•鎽嗚噦寮?/span>•涓昏鐢盭銆乊銆乑杞寸粍鎴愶紝X杞存湯绔摼鎺ユ帶鍒跺櫒锛屾帶鍒跺櫒缁昘杞磋浆鍔紝瀹炵幇鍥涜酱鑱斿姩锛孻杞寸殑绉诲姩閫氳繃澶栧姞婊戣建銆乑杞翠富瑕佹槸鍗囬檷•鍏锋湁杈冮珮鐨勫己搴﹀拰绋冲畾鎬э紝骞挎硾搴旂敤浜庡浗鍐呭鐢熶骇鍘傚锛屾槸鍏宠妭寮忔満鍣ㄤ汉鐨勭悊鎯虫浛浠e搧锛屼絾璐熻浇绋嬪害鐩稿浜庡叧鑺傚紡鎼繍鏈哄櫒浜哄皬•鍏宠妭寮?/span>•鏈?-6杞达紝琛屼负绫讳技浜庝汉绫荤殑鎵嬭噦•6杞存惉杩愭満鍣ㄤ汉鏈綋閮ㄥ垎鍏锋湁鍥炶浆銆佹姮鑷傘€佸墠浼搞€佹墜鑵曟棆杞€佹墜鑵曞集鏇层€佹墜鑵曟壄杞?涓嫭绔嬪叧鑺?/span>•5杞存惉杩愭満鍣ㄤ汉鏈綋閮ㄥ垎鍏锋湁鍥炶浆銆佹姮鑷傘€佸墠浼搞€?鎵嬭厱寮洸銆佹墜鑵曟壄杞?涓嫭绔嬪叧鑺?/span>•6杞存惉杩愭満鍣ㄤ汉鏈綋閮ㄥ垎鍏锋湁鍥炶浆銆佹姮鑷傘€佸墠浼搞€?鎵嬭厱鎵浆4涓嫭绔嬪叧鑺?/span>•鐗圭偣锛氱粨鏋勭揣鍑戙€佸崰鍦扮┖闂村皬銆佺浉瀵瑰伐浣滅┖闂村ぇ銆佽嚜鐢卞害楂?/span>•閫傜敤浜庡嚑涔庝换浣曡建杩规垨瑙掑害鐨勫伐浣?/span>•缁撴瀯涓婁笌鍏朵粬鍏宠妭寮忓伐涓氭満鍣ㄤ汉鏈綋绫讳技鍦ㄨ礋杞借緝杞绘椂涓よ€呮湰浣撳彲浠ヤ簰鎹?br>璐熻浇杈冮噸鏃舵惉杩愭満鍣ㄤ汉鏈綋閫氬父浼氭湁闄勫姞杩炴潌锛屽叾渚濋檮浜庤酱褰㈡垚骞宠鍥涜竟褰㈣繛鏉嗘満鏋勶紝璧峰埌鏀拺鏁翠綋鍜岀ǔ鍥烘湯绔綔鐢紝涓斾笉鍥犺噦灞曚几缂╄€屽彉鍖栤€?/span>•鐗圭偣锛氬畾浣嶇簿纭€佺敓浜ц川閲忕ǔ瀹氥€佸伐浣滆妭鎷嶅彲璋冦€佽繍琛屽钩绋冲彲闈犮€佺淮淇柟渚?/span>•绯荤粺缁勬垚锛氭満鍣ㄤ汉鎺у埗鏌溿€佺ず鏁欏櫒銆佹皵浣撳彂鐢熻缃€佺湡绌哄彂鐢熻缃€佹搷浣滄満銆佺鎷惧櫒锛堟墜鐖級•绀烘暀鍣ㄤ綔鐢細鎿嶄綔鑰呭彲閫氳繃绀烘暀鍣ㄥ拰鎿嶄綔闈㈡澘杩涜鎼繍鏈哄櫒浜鸿繍鍔ㄤ綅缃拰鍔ㄤ綔绋嬪簭鐨勭ず鏁欙紝璁惧畾杩愬姩閫熷害銆佹惉杩愬弬鏁?/span>•鏈鎵ц鍣ㄦ槸鍔犳寔宸ヤ欢绉诲姩鐨勪竴绉嶅す鍏凤紙濡備粖鎵嬬埅鍦ㄤ竴瀹氳寖鍥村唴鍏锋湁鍙皟鎬э紝鍙厤澶囨劅鐭ュ櫒锛屼互纭繚灞€鍩熻冻澶熺殑澶规寔鍔涗繚璇佽冻澶熺殑鍔犳寔绮惧害•鍚搁檮寮?/span>TCP鐐逛竴鑸瀹氬湪娉曞叞涓績绾夸笌鍚哥洏骞抽潰浜ょ偣澶?/span>•姘斿惛闄勶紙涓昏鍒╃敤鍚哥洏鍐呭帇鍔涘拰澶ф皵鍘嬩箣闂寸殑鍘嬪姏宸繘琛屽伐浣?/span>鏍规嵁鍘嬪姏宸垎绫?/span>•鐪熺┖鍚哥洏鍚搁檮閫氳繃杩炴帴鐪熺┖鍙戠敓瑁呯疆鍜屾皵浣撳彂鐢熻缃紝宸ヤ綔鏃剁湡绌哄彂鐢熻缃皢鍚哥洏涓庡伐浠朵箣闂寸殑绌烘皵鍚歌蛋浣垮叾杈惧埌鐪熺┖鐘舵€侊紝姝ゆ椂鍚哥洏鍐呭ぇ姘斿帇灏忎簬鍚哥洏澶栧ぇ姘斿帇锛屽伐浠跺湪鍘嬪姏鐘舵€佷笅琚姄鍙?/span>•姘旀祦璐熸皵鍘嬫皵鍚搁檮鍒╃敤娴佷綋鍔涘鍘熺悊锛岄€氳繃娴佸姩鍘嬬缉绌烘皵锛堥珮鍘嬶級楂橀€熸祦鍔ㄥ甫璧板惛鐩樻皵浣擄紙浣庡帇锛変娇鍚哥洏鍐呭舰鎴愯礋鍘嬶紱鍒囨柇鍘嬬缉绌烘皵闅忓嵆娑堥櫎璐熷帇锛屽畬鎴愬伐浠堕噴鏀惧姩浣?/span>•鎸ゅ帇鎺掓皵璐熸皵鍘嬫皵鍚搁檮鍒╃敤鍚哥洏鍙樺舰鍜屾媺鏉嗙Щ鍔ㄦ敼鍙樺惛鐩樺唴澶栭儴鍘嬪姏瀹屾垚宸ヤ欢鍚稿彇鍜岄噴鏀惧姩浣?/span>•鍚哥洏鍒嗙被•鏅€氬瀷锛氬钩闈㈠惛鐩樸€佽秴骞冲惛鐩樸€佹き鍦嗗惛鐩樸€佹尝绾圭鍨嬪惛鐩樸€佸師鍨嬪惛鐩?/span>•鐗规畩鎬э細涓撶敤鍨嬪惛鐩樸€佸紓鍨嬪惛鐩?/span>•纾佸惛闄?/span>•鍚哥洏鍒嗙被锛氱數纾佸惛鐩樸€佹案纾佸惛鐩樸€佺數姘哥鍚哥洏•鐢电鍚哥洏鍦ㄥ唴閮ㄦ縺鍔辩嚎鍦堥€氱洿娴佺數鍚庝骇鐢熺鍔?/span>•姘哥鍚哥洏鍒╃敤纾佸姏绾块€氳矾鐨勮繛缁€у強纾佸満鐨勫彔鍔犳€у伐浣滐紝涓€鑸案纾佸惛鐩樼殑纾佽矾涓哄涓绯伙紝閫氳繃纾佺郴涔嬮棿鐨勭浉浜掕繍鍔ㄦ潵鎺у埗姝や欢涓婄殑纾佸満寮哄害锛岃繘鑰屽疄鐜板伐浠剁殑鍚搁檮涓庨噴鏀惧姩浣?/span>•鐢垫案纾佸惛鐩?/span>鍒╃敤姘镐箙纾侀搧浜х敓纾佸姏锛屽埄鐢ㄦ縺鍔辩嚎鍦堝鍚稿姏澶у皬杩涜鎺у埗•澶归挸寮?/span>TCP鐐逛竴鑸瀹氬湪娉曞叞涓績绾夸笌鎵嬬埅鍓嶇闈㈢劍鐐瑰•閫氳繃鎵嬬埅鐨勫紑鍚笌闂悎瀹炵幇瀵瑰伐浠剁殑澶瑰彇锛屼竴鑸敱鎵嬬埅銆侀┍鍔ㄦ満鏋勩€佷紶鍔ㄦ満鏋勩€佽繛鎺ャ€佹敮鎵垮崟鍏冪粍鎴?/span>•澶氱敤浜庤礋杞介噸銆侀珮娓┿€佽〃闈㈣川閲忎笉楂樼瓑鍚搁檮寮忔棤娉曡繘琛屽伐浣滅殑鍦哄悎•鐖潰鍒嗙被锛氬钩婊戠埅闈€侀娇褰㈢埅闈€佹煍鎬х埅闈?/span>鏍规嵁琚姄鍘诲伐浠剁殑褰㈢姸銆佸ぇ灏忓強鎶撳彇閮ㄤ綅鐨勪笉鍚屽垎绫?/span>•浠夸汉寮?/span>鏄拡瀵圭壒娈婂褰㈠伐浠惰繘琛屾姄鍙栫殑涓€绫绘墜鐖?/span>•鏌旀€ф墜宸ヤ欢澶氫负鍦嗗舰銆佷笉瑙勫垯绛夎交渚垮伐浠?/span>•澶氭寚鐏靛阀鎵?/span>1.鏈€瀹岀編鐨勪豢浜烘墜鐖紝鍖呮嫭澶氭牴鎵嬫寚锛屾瘡鏍规墜鎸囬兘鍖呭惈3涓洖杞嚜鐢卞害涓旂嫭绔嬫帶鍒讹紝鍙疄鐜扮簿纭搷浣?br>2.鈥嬪箍娉涘簲鐢ㄤ簬鏍稿伐涓氥€佽埅澶╁伐涓氱瓑楂樼簿搴︿綔涓?/span>•鎵嬬埅椹卞姩鏂瑰紡澶归挸寮忋€佷豢浜哄紡涓€鑸渶瑕佸崟鐙鍔涜繘琛岄┍鍔紝鍗抽渶瑕佽繛鎺ョ浉搴斿閮ㄤ俊鍙锋帶鍒惰缃強浼犳劅绯荤粺•姘斿姩杞诲瀷銆佷腑鍨嬮浂浠?/span>•鐢靛姩绮惧害瑕佹眰灏辫緝楂樻垨澶嶆潅鐨勫満鍚?/span>•娑插帇閲嶅瀷闆朵欢•椹卞姩瑁呯疆灏嗕骇鐢熺殑鍔涙垨鍔涚煩閫氳繃浼犲姩瑁呯疆浼犻€掔粰鏈鎵ц鍣紙鎵嬬埅锛夛紝浠ュ疄鐜版姄鍙栦笌閲婃斁鍔ㄤ綔銆?/span>渚濇嵁鎵嬬埅寮€鍚棴鍚堢姸鎬侊紝浼犲姩瑁呯疆鍙垎涓哄洖杞瀷涓庣Щ鍔ㄥ瀷•鍥炶浆鍨?/span>澶归挸寮忔墜鐖父鐢ㄥ舰寮忥紝閫氳繃鏂滄銆佹粦妲姐€佽繛鏉嗐€侀娇杞灪鏉嗘垨娑¤疆铚楁潌绛夋満鏋勭粍鍚堝舰寮忥紝鍙€傛椂鏀瑰彉浼犲姩姣斾緥浠ュ疄鐜板鍔犳寔宸ヤ欢涓嶅悓鍔涚殑闇€姹?/span>•绉诲姩鍨?/span>鎵嬬埅鍋氬钩闈㈢Щ鍔ㄦ垨鑰呯洿绾垮線澶嶇Щ鍔ㄦ潵瀹炵幇寮€鍚棴鍚堬紝澶氱敤浜庡す鎸佸叿鏈夊钩闈㈡€х殑宸ヤ欢锛岃璁$粨鏋勭浉瀵瑰鏉傦紝搴旂敤涓嶅鍥炶浆鍨嬪箍娉?/span>•浣滀笟绀烘暀娴佺▼锛堝喎鍔犲伐銆佺儹鍔犲伐锛?/span>•鍐峰姞宸?/span>鏈哄櫒浜哄彲涓哄叧鑺傚紡鎴栫洿瑙掑紡鏈鎵ц鍣ㄥ彲涓哄惛闄勫紡鎴栧す閽冲紡鈥?/span>•绀烘暀鍓嶇殑鍑嗗•鏂板缓涓€涓▼搴?/span>•杈撳叆绋嬪簭鐐?锛堟満鍣ㄤ汉鍘熺偣锛?PTP•杈撳叆绋嬪簭鐐?锛堢Щ鍔ㄤ腑闂寸偣锛?PTP•杈撳叆绋嬪簭鐐?锛堟惉杩愪复杩戠偣锛?PTP•杈撳叆绋嬪簭鐐? 锛堟惉杩愪綔涓氱偣锛夌洿绾挎彃琛? 鎶撳彇•杈撳叆绋嬪簭鐐?锛堟惉杩愪腑闂寸偣锛夌洿绾挎彃琛? 鎶撳彇•杈撳叆绋嬪簭鐐? 锛堟惉杩愪腑闂寸偣锛塒TP 鎶撳彇•杈撳叆绋嬪簭鐐?锛堟惉杩愪腑闂寸偣锛塒TP 鎶撳彇•杈撳叆绋嬪簭鐐?锛堟惉杩愪腑闂寸偣锛塒TP 鎶撳彇•杈撳叆绋嬪簭鐐?锛堟惉杩愪腑闂寸偣锛塒TP 鎶撳彇•杈撳叆绋嬪簭鐐?0锛堟惉杩愪綔涓氱偣锛夌洿绾挎彃琛? 鏀剧疆•杈撳叆绋嬪簭鐐?1锛堟惉杩愯閬跨偣锛夌洿绾挎彃琛?/span>•杈撳叆绋嬪簭鐐?2锛堢Щ鍔ㄤ腑闂寸偣锛塒TP•杈撳叆绋嬪簭鐐?3锛堟満鍣ㄤ汉鍘熺偣锛塒TP•璁惧畾鎼繍鏉′欢•杩愯纭锛堣窡韪級•鍐嶇幇鎼繍•鐑姞宸?/span>•绀烘暀鍓嶇殑鍑嗗•鏂板缓涓€涓▼搴?/span>•杈撳叆绋嬪簭鐐?锛堟満鍣ㄤ汉鍘熺偣锛?PTP•杈撳叆绋嬪簭鐐?锛堟惉杩愪复杩戠偣锛塒TP•杈撳叆绋嬪簭鐐?锛堟惉杩愪綔涓氱偣锛夌洿绾挎彃琛?/span>•杈撳叆绋嬪簭鐐?锛堟惉杩愪腑闂寸偣锛夌洿绾挎彃琛?/span>•杈撳叆绋嬪簭鐐?锛堟惉杩愪腑闂寸偣锛塒TP 鎶撳彇•杈撳叆绋嬪簭鐐?锛堟惉杩愪腑闂寸偣锛塒TP 鎶撳彇•杈撳叆绋嬪簭鐐?锛堟惉杩愪腑闂寸偣锛夌洿绾挎彃琛? 鎶撳彇•杈撳叆绋嬪簭鐐?锛堟惉杩愪綔涓氱偣锛夌洿绾挎彃琛? 鏀剧疆•杈撳叆绋嬪簭鐐?锛堢Щ鍔ㄨ閬跨偣锛夌洿绾挎彃琛?/span>•杈撳叆绋嬪簭鐐?0锛堟満鍣ㄤ汉鍘熺偣) PTP•璁惧畾鎼繍鏉′欢•杩愯纭锛堣窡韪級•鍐嶇幇鎼繍•鍛ㄨ竟璁惧锛氭粦绉诲钩鍙般€佹惉杩愮郴缁熻缃€佸畨鍏ㄤ繚鎶よ缃?/span>•婊戠Щ骞冲彴鐢变簬鎼繍绌洪棿澶э紝鎼繍鏈哄櫒浜虹殑鏈宸ュ叿鏃犳硶杈惧埌鎸囧畾鐨勬惉杩愪綅缃垨濮挎€侊紝姝ゆ椂鍙€氳繃澶栭儴杞寸殑鍔炴硶鏉ュ鍔犳満鍣ㄤ汉鐨勮嚜鐢卞害銆傛渶甯哥敤鐨勫姙娉曟槸澧炲姞婊戠Щ骞冲彴锛屽彲瀹夎鍦ㄥ湴闈㈡垨榫欓棬妗嗘灦涓?/span>•鎼繍绯荤粺瑁呯疆•鐪熺┖鍙戠敓瑁呯疆•姘斾綋鍙戠敓瑁呯疆•娑插帇鍙戠敓瑁呯疆•瀹夊叏淇濇姢瑁呯疆•宸ヤ綔绔欙細鎿嶄綔鏈恒€佹帶鍒剁郴缁熴€佹惉杩愮郴缁燂紙姘斾綋鍙戠敓瑁呯疆銆佺湡绌哄彂鐢熻缃€佹墜鐖級銆佸畨鍏ㄤ繚鎶よ缃?/span>宸ヤ綔绔欐槸鍚﹀悎鐞嗙洿鎺ュ奖鍝嶆惉杩愰€熺巼鍜岀敓浜ц妭鎷?/span>•甯冨眬锛歀銆佺幆瑁呫€佲€滃搧鈥濄€佲€滀竴鈥?/span>•L鍨嬪竷灞€瀹夎鍦ㄩ緳闂ㄦ鏋朵笂锛屼娇鍏惰璧板湪鏈哄簥涓婃柟锛屽彲澶ч檺搴﹁妭绾﹀湴闈㈣祫婧?/span>•鐜甯冨眬锛堝矝寮忓姞宸ュ崟鍏冿級鍙彁楂樼敓浜ф晥鐜囷紝鑺傜害绌洪棿锛岄€傚悎灏忕┖闂村巶鎴夸綔涓?/span>•鈥滃搧鈥濆瓧甯冨眬•鈥滀竴鈥濆瓧甯冨眬瀵瑰巶鎴跨殑楂樺害闀垮害鏈変竴瀹氱殑瑕佹眰锛岋紝鍥犲叾宸ヤ綔杩愬姩鏂瑰紡涓虹洿绾跨紪绋嬶紝鏁呭緢闅捐兘婊¤冻瀵规斁缃綅缃€佺浉浣嶇瓑鏈夌壒鍒姹傚伐浠剁殑涓婁笅鏂欎綔涓?/span>。
倒立摆机器人系统的数学模型描述
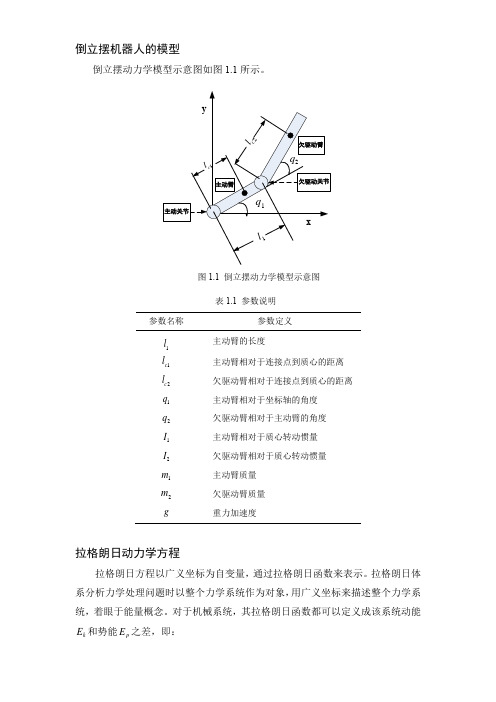
倒立摆机器人的模型倒立摆动力学模型示意图如图1.1所示。
图1.1倒立摆动力学模型示意图表1.1 参数说明参数名称参数定义1l 主动臂的长度1c l主动臂相对于连接点到质心的距离2c l 欠驱动臂相对于连接点到质心的距离1q主动臂相对于坐标轴的角度2q 欠驱动臂相对于主动臂的角度1I 主动臂相对于质心转动惯量2I 欠驱动臂相对于质心转动惯量1m 主动臂质量2m 欠驱动臂质量g重力加速度拉格朗日动力学方程拉格朗日方程以广义坐标为自变量,通过拉格朗日函数来表示。
拉格朗日体系分析力学处理问题时以整个力学系统作为对象,用广义坐标来描述整个力学系统,着眼于能量概念。
对于机械系统,其拉格朗日函数都可以定义成该系统动能k E 和势能p E 之差,即:k pL E E =-(1.1)系统的动能和势能可以用任意选取的坐标系来表示。
系统的动力学方程(第二类拉格朗日方程)为:d L Ldt qq τ∂∂=-∂∂ (1.2)由于势能不含速度项,因此动力学方程也可以写成:pk k E E E d dt q q qτ∂∂∂=-+∂∂∂ (1.3)由此可见,对于Pendubot 系统,其拉格朗日运动方程则为:()()()1,,[ 0]()()()1,2T i i i d K q q K q q P q dt q q qi τ∂∂∂-+=∂∂=∂(1.4)其中,(),K q q为Pendubot 系统的动能之和,()P q 为Pendubot 系统的势能总和。
摆臂受到的力矩为τ,只有摆臂与电机相连接的主动关节受力,而另一个关节是欠驱动的。
由于两杆均为刚体,所以摆臂的动能与势能可根据每一根杆的总质量与相对于重心的惯量来唯一确定。
欠驱动机械臂动力学模型根据式(1.4),分析Pendubot 摆臂的动能和势能。
计算平移动能的一般表达式为22mv K =。
由上图可知,系统两个摆臂的角速度可以表示为:11212ωωqq q ==+ , (1.5)对于系统的主动臂,其平移动能可以直接描述成以下形式:22111112c K m l q =(1.6)由于系统的势能大小与机械臂的质心位置有关系,这里可以用y 坐标来表示摆臂的其位置高度,于是势能可以直接描述为:1111 sin()c P m l g q =(1.7)对于系统的欠驱动臂,要先得到其质心位置的笛卡儿坐标表达式,然后通过微分处理得到关节角速度。
摆臂机器人的结构

摆臂机器人的结构嘿,今天咱们来聊聊一个挺酷的东西——摆臂机器人。
你可能觉得,摆臂机器人?这玩意儿就是个机器手臂吧,跟咱们平常在工厂里看到的那些自动化机器手差不多。
其实没错,不过它的结构可真有点意思,咱今天就好好捋一捋这机器臂是怎么“长”出来的。
你要是近距离看一台摆臂机器人,就会发现它的“躯体”大致分成几个部分。
最上面那部分,叫做“基座”。
它其实是机器人站立的地方,负责支撑整个机器臂的重量。
如果这部分不给力,机器人肯定站不稳。
所以说,基座就像咱们人的双腿,稳稳地支撑着上面的一切。
接着呢,就是机器臂的“上臂”和“下臂”。
上臂主要负责左右摆动,帮机器人完成横向的运动。
下臂则是用来垂直方向上做运动的,向上、向下的动作都靠它来完成。
其实,它们这两个部分很像咱们人的手臂——大臂和小臂一样的配合。
你看,它们要是配合得好,机器人就能像人一样灵活地搬东西、抓东西,甚至做点精细的操作。
要是没配合好,嘿,可能就只能站在那儿,摆个姿势而已。
说到这,肯定会有小伙伴好奇,怎么才能让机器人臂动得灵活呢?这就离不开一个东西——驱动系统。
它就像机器人的“肌肉”,通过电机或者液压装置提供动力,让各个关节可以动起来。
驱动系统就像我们肌肉里那些小小的肌纤维,控制着机器臂的每一个动作。
你想啊,要是机器人要搬一件重的东西,驱动系统得让机器臂肌肉发挥出大力量才能完成任务;而如果它需要做个细致的动作,像焊接啊,雕刻啊,那驱动系统又得精确得像咱们做手工一样,一点点控制力度,不能乱来。
机器人手臂上面有一些关节,关节就像是人类手臂的肘部、肩部,它们负责连接上臂和下臂,也让机器臂能做出不同的运动。
这些关节有的通过马达驱动,有的通过液压驱动,反正不管用啥办法,它们要保持灵活性和稳定性,这样机器人才能做到精准的动作。
如果这些关节不够灵活,机器人就像个铁臂,动作就会很笨重,效率也大打折扣。
当然,咱们也不能忘了控制系统。
你看,人类的动作是大脑控制的,对吧?机器人呢,它的“大脑”就是控制系统。
工业机器人技术及应用(教案)5-搬运机器人及其操作应用

第五章搬运机器人及其操作应用5.1 搬运机器人的分类及特点5.2 搬运机器人的系统组成5.3 搬运机器人的作业示教5.3.1 冷加工搬运机器人5.3.2 热加工搬运机器人学习目标导入案例课堂认知扩展与提高本章小结思考练习5.4 搬运机器人的周边设备5.4.1 周边设备5.4.1 周边设备课前回顾如何使用在线示教方式进行工业机器人任务编程?如何进行工业机器人离线作业示教再现?学习目标认知目标了解搬运机器人的分类及特点掌握搬运机器人的系统组成及其功能熟悉搬运机器人作业示教的基本流程熟悉搬运机器人的周边设备与布局能力目标能够识别搬运机器人工作站基本构成能够进行搬运机器人的简单作业示教导入案例机器人助力机床上下料,国产高效智能压铸装备研制成功智能压铸岛是以压铸机为核心设备构成的一组智能化生产单元,以无人化生产管理方式自动完成从原材料到合格铸件成品间的工艺生产流程,实现压铸生产的程序化、数字化和远程控制。
高效智能压铸岛以压铸机为核心,配备 3-10 个机器人和多部 AGV 小车,集成多个控制系统、伺服系统、检测系统于一体,包括铝液智能熔化系统、伺服定量浇注系统、炉料回收系统、智能熔体含气量检测系统、真空压铸系统自动模温机、自动三维伺服喷涂机械手、耐高温抗腐蚀的装件取件机器人、镶嵌自动快速加热和均温装置、自动型芯冷却系统、自动余料去除及飞边清理装置、大型精密压铸模具、输送带、冷却装置、在线智能检测系统、激光打标机、智能转运小车、压铸生产信息化管理系统、嵌入式专用控制器、压铸专家系统等设备和系统。
课堂认知5.1 搬运机器人的分类及特点搬运机器人具有通用性强、工作稳定的优点,且操作简便、功能丰富,逐渐向第三代智能机器人发展,其主要优点有。
动作稳定和提高搬运准确性。
提高生产效率,解放繁重体力劳动,实现“无人”或“少人”生产。
改善工人劳作条件,摆脱有毒、有害环境。
柔性高、适应性强,可实现多形状、不规则物料搬运。
定位准确,保证批量一致性。
摆臂机器人的工作原理

摆臂机器人的工作原理
摆臂机器人是一种基于机械臂和运动控制的自动化设备。
其工作原理主要分为以下几个步骤:
1. 移动控制:摆臂机器人通过控制电机或气缸移动,将其机械臂移动到指定点位。
2. 空间位置检测:摆臂机器人带有各种传感器,用于检测机械臂在三维空间中的位置、姿态和速度等参数。
3. 精度控制:摆臂机器人利用先进的控制算法,根据空间位置检测结果来精确控制机械臂的运动轨迹和速度,以达到高精度和高速度的工作效率。
4. 操作控制:摆臂机器人可以根据预设程序或操作者的指令,自动完成各种工作任务,如物品搬运、装配生产线中的零部件,以及与其他自动化设备的协调等。
总之,摆臂机器人通过运动控制和空间定位技术,自动进行各种工作任务,提高了生产效率和生产环境的安全性,具有广阔的市场前景。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
多年质保操作简单方便快捷—————————————————————————————————————————————在我们工业零部件以及其它产品生产过程中,工人的操作速度是有限的,任何一个工位和产品都不排除可以靠机器人来操作的可能。
而且机械操作能够24小时不间断,在提高生产率方面有比较重要的作用。
接下来由安徽泰珂森智能装备科技有限公司为您简单介绍摆臂式机械手的优点,希望能给您带来一定程度上的帮助。
针对国内冲压行业,摆臂冲床机械手具有较高的实用性和性价比,是自动冲压生产线的理想解决方案。
在灵活性、实用性、使用性、生产效率以及性价比上都较为均衡适中。
从功能的角度来看,摆臂式冲压机械手又有以下优点:
1.多轴的联动控制使其能够任意角度的准确定位、抓取和放置工件;
多年质保操作简单方便快捷—————————————————————————————————————————————
2.冲压机械手臂的上下铅垂运动使其可适应不同吨位冲床工作台面的高度落差,能适配市面上所有类型的冲压设备:齿轮冲床、气动冲床、油压机,并做到无论吨位大小、机台高低,都可随意连接,实现设备的自由组合;
3.立柱根部的转动使其可实现270度大角度范围的工件搬运与操作;
4.冲压机械手臂的水平伸缩可避免手臂摆动过程中对外物的干涉碰撞,又可以减小摆动时的转动惯量;
5.的手臂根部的转动使其可实现工件的翻转、侧挂等工艺动作;
6.紧凑的本体结构和重量,安装占位空间小、移动“调岗”方便简单;
多年质保操作简单方便快捷—————————————————————————————————————————————
7.开放式可编程技术,示教设定灵活,普通熟练人员三分钟即可设定完毕;
8.智能运动控制卡可存储多种产品工艺信息,随时方便切换,一次设;
安徽泰珂森智能装备科技有限公司集机械手、工业机器人系统集成研发、制造、销售、自动化控制工程承包于一体的综合性自动化技术企业。
公司在自动化领域具备充足的技术研发能力和丰富的项目经验,为各行业工厂量身订做适合、先进的自动化控制系统和解决方案。
公司在机械加工及自动上下料、自动打磨抛光,包装物流及搬运,汽车零部件加工组装,无人化工厂解决方案等众多行业中拥有成熟的应用案例。
致力于以工业机器人应用为核心,为客户提供完善的自动化解决方案和交钥匙工程,同时是德国库卡、日本发那科、日本川崎、国产埃夫特机器人授权代理商与系统集成商,在机器人技术应用上有着密切的合作,为用户提供强有力的技术支撑。