超经典CANoe 工程案例精选.
超经典CANoe工程案例word精品

超经典CANoe工程案例word精品.Step by step系列(一)基础应用CANoe 入门版本进行介绍,其他版本功能CANoe7.6Vector 公司的针对汽车电子行业的总线分析工具,现在我用CANoe是基本差不多。
CAN case XL.硬件我使用的是,Vector 这样在控制面板中,连接硬件,再装软件。
安装完成,插上USB软件的安装很简单,1,CANoe先装驱动,Hardware 进行查看),另外常用的LIN(CAN),一个是7269中的两个通过查看信息可知,CANcaseXLpiggy,一个是251(高速可以自由组合中只能支持两路通讯,这样piggyCAN(低速CAN,或称容错),因为CANcaseXL1054还有CANoe 软件硬件连接正常,打开2,这样新建了波特率为可以选择新建工程的模版,我们这里选择CAN_500kBaud.tcn,File->New Configuration进行保存500K CAN工程,可以File->Save Configuration, 工具对总线网络节点,消息,信号,进行定义了。
接下来就要使用CAN db++ Editor3,开始菜单中找这个工具启动,或点击工具栏的这个图标CANTemplate.dbc,File->Create Database,启动后,选择选择目录及文件名,进行保存..右键 Network nodes->New ,进行网络节点的定义,这里只需要填写Name即可,例如:Node_A然后添加Node_B,完成后如下图,这样在Network nodes目录下面添加出来两个节点DLCIDMessages->New,CAN节点添加完成后,下一步添加消息,右键这是需要定义名称,,等信息,如下:. .然后在Transmitters页面,点击Add按钮,添加Node_A为发送节点,意思就是说,此消息是从Node_A节点发送出来的其实还有一种方法就是,此时暂时不定义发送节点,然后直接以拖曳的方式拖曳到发送节点上,功能上是一样的有了消息,消息里携带的东西自然是信号咯,那么我们开始创建一个信号 Signals->New,右键填写如下信息..用0和1来表示开关信号状态似乎还不是很直观,我们可以使用on和off来表示就好了,于是View->Value Tables,右键空白处->New,键入如下信息:..定义好了之后,还需要跟信号进行关联。
CANOE教程(2024)

关闭所有正在运行的程序, 重新启动计算机后尝试重新
安装。
10
常见问题解决方案
2024/1/30
01
检查安装包是否完整,如果安装包损坏,请重新下 载。
02
2. 无法激活软件
03
确保输入的许可证密钥或激活码正确无误。
11
常见问题解决方案
2024/1/30
01 检查网络连接是否正常,尝试重新启动计算机后 再次激活。
02 如果问题仍然存在,请联系软件供应商获取帮助 。
03
3. 软件运行缓慢或崩溃
12
常见问题解决方案
检查计算机性能是否满足系统要求。 更新显卡驱动和操作系统至最新版本。
2024/1/30
关闭其他正在运行的程序,释放系统资 源。 如果问题仍然存在,请尝试重新安装软 件或联系技术支持获取帮助。
13
03
控制系统功能验证
阐述如何利用CANOE对工业自动化控制系统的 功能进行验证,包括逻辑控制、数据处理等方面 。
故障诊断与远程维护
3
分享在工业自动化领域应用CANOE进行故障诊 断与远程维护的实战经验,提高生产效率和设备 利用率。
2024/1/30
29
THANKS
2024/1/30
30
示波器
用于检测CAN信号波形, 帮助定位物理层问题。
万用表
用于测量电压、电阻等参 数,辅助诊断硬件故障。
24
远程协助服务流程
问题描述与确认
用户详细描述故障现象,工程 师根据描述初步判断故障类型 。
故障定位与解决
根据分析结果,工程师给出故 障定位及解决方案建议,用户 根据建议进行操作。
建立远程连接
通过远程桌面软件或VPN等方 式建立远程连接,确保双方可 以实时沟通。
CANoe功能介绍及应用案例.ppt

查表函数
Index()
END
Table_3D ()
ISG_HCU_state_Cal ()
OutTorq_Cal ()
编写Panel界面
关联按钮
...
Thanks
19
东风汽车公司技术中心
DONGFENG MOTOR CORP. R&D CENTER
CANoe功能介绍及应用案例
动力总成部 7月20日
1
Dong Feng Motor Corporation Technical Center◎2012 All rights reserved.
目录
一、CANoe的功能介绍 二、CANoe试验设计 三、CANoe应用案例解析
HCU_state=0 outTorq=0
Iபைடு நூலகம்le
HCU_state=2 outTorq=
T-Fric+PID
Recycle
HCU_state=3 outTorq=-f(vs,n)
Acc
HCU_state=4 Torq=
T-Fric+T_dri
Assist
HCU_state=6 outTorq= T-demand-T_max
ECU
CANoe
报文
(EMS1~EMS8)
设置EMS1报文触发, 定义HCU2报文中的 HCU_EngSpdCmd和
HCU_EngControlMod e,其通过Panel赋值
调速模式
三、应用案例解析
2、建立网关—解决自动挡刹车前窜故障
实验目的
S30/H30自动挡车型“刹车前窜”的主要原因是在 刹车过程中,出现了扭矩干涉,使PID的调节失效。 具体原因如下:
canoe示例soabasicasradaptive工程介绍 -回复

canoe示例soabasicasradaptive工程介绍-回复Canoe示例soabasicasradaptive工程介绍所基于的SOMA是一个基于架构的系统设计方法,通过将软件系统划分为不同的服务来实现系统的灵活性和可重用性。
SOMA method允许系统的设计者根据系统的需求和约束来选择合适的服务,并在需要时对系统进行适应性调整。
这种方法的一个重要组成部分是Canoe框架,它提供了一个可视化工具来帮助系统设计师理解和调整系统的结构和功能。
Canoe是一个基于网格计算的应用平台,可以将不同类型的服务组合在一起来构建一个完整的系统。
尽管它使用了网格计算作为支持,但Canoe 并不局限于任何特定的计算环境。
它可以在传统的计算机集群、云计算环境或其他类型的计算环境中运行。
Canoe的一个关键特性是其自适应能力。
它可以根据不同的环境和需求对系统进行动态调整,以保证系统的性能和可靠性。
这种自适应能力是通过Canoe中的Adaptive Engine来实现的。
Adaptive Engine基于SOMA 的原则,使用一个软件Agent来监控系统的性能,自动检测问题并进行相应的调整。
Canoe提供了一组模块化的服务,可以根据需要进行组合。
这些服务包括不同类型的数据存储、消息传递、计算、安全性和可靠性保证等。
这些服务可以以不同的方式连接,并使用不同的通信协议进行交互。
Canoe的设计目标之一是提供一个灵活和易于使用的框架,使系统设计者能够根据具体需求选择合适的服务,并将它们组合在一起以构建一个高度可定制的系统。
在Canoe中,系统的不同组件可以以WebService的形式提供。
这使得Canoe可以与其他系统和服务进行集成,实现更复杂的系统。
Canoe还提供了一个可视化工具,帮助设计者理解和调整系统的结构和功能。
这个工具可以显示系统的不同组件之间的依赖关系,并提供了一种简单的方式来定义这些依赖关系。
Canoe所基于的SOMA方法采用了一种模块化的设计方法,可以将软件系统划分为不同的服务,并根据系统的需求和约束来选择合适的服务。
基于CANoe的高性能网关测试系统的构建

《工业控制计算机》2010年第23卷第8期进行整车电气系统架构设计时,由于动力系统Powertrain 与车身系统Comfort在控制要求上的不同,通常将整车网络设计为Powertrain系统(高速CAN网络)和Comfort系统(中速CAN网络)。
在Powertrain系统和Comfort系统之间通常使用一个独立的高性能网关模块HGT(high performance gate-way)来实现两个子系统的信息交互,主要包括:发动机转速,发动机冷却液温度,剩余燃油量,车速等。
系统框架如图1所示。
图1整车网络架构高性能网关模块是实现Powertrain子系统和Comfort子系统信息交互的纽带,其在整个系统中具有相当重要的作用。
因此,在系统开发过程中,对高性能网关模块进行专门的测试,确保高质量完成整车电气系统设计。
1测试系统硬件平台的构建1.1CANoe简介CANoe是德国Vector公司开发的分布式系统设计、仿真、测试、评估的强大工具,它能支持总线开发的整个过程,是本测试系统的核心。
该工具提供了整个开发流程各阶段的专业功能,包括通信协议数据库的创建和修改、建模、仿真、功能测试、诊断和分析。
CANoe主要包括以下基本功能:①创建网络数据库(比如:DBC、FIBEX、LDF、NCF、MOST Function Catalog);②通过建模进行完整的总线系统仿真和残余总线仿真;③分析总线通信;④测试完整网络和单个控制单元;⑤通过KWP2000和UDS 或者运用完整的诊断测试工具进行通信诊断;⑥用户可以运用类C的CAPL编程语言编程实现仿真、分析和测试;⑦可以创建用户自定义界面来控制仿真和测试过程或显示分析数据。
本系统主要利用了CANoe的网络测试功能。
1.2测试系统硬件平台的构建整个测试系统主要由高性能网关模块、稳压电源、CANoe 软硬件模块和PC机等几部分组成,其中,CANoe的硬件模块CANcaseXL支持两路CAN通道,一路与高性能网关HGT的Powertrain(高速CAN)网络接口相连,另一路则与高性能网关HGT的Comfort(中速CAN)网络接口相连。
超经典CANoe工程案例word精品
.Step by step系列(一)基础应用CANoe 入门版本进行介绍,其他版本功能CANoe7.6Vector 公司的针对汽车电子行业的总线分析工具,现在我用CANoe是基本差不多。
CAN case XL.硬件我使用的是,Vector 这样在控制面板中,连接硬件,再装软件。
安装完成,插上USB软件的安装很简单,1,CANoe先装驱动, Hardware 进行查看),另外常用的LIN(CAN),一个是7269中的两个通过查看信息可知,CANcaseXLpiggy,一个是251(高速可以自由组合中只能支持两路通讯,这样piggyCAN(低速CAN,或称容错),因为CANcaseXL1054还有 CANoe 软件硬件连接正常,打开2,这样新建了波特率为可以选择新建工程的模版,我们这里选择CAN_500kBaud.tcn,File->New Configuration进行保存500K CAN工程,可以File->Save Configuration, 工具对总线网络节点,消息,信号,进行定义了。
接下来就要使用CAN db++ Editor3,开始菜单中找这个工具启动,或点击工具栏的这个图标 CANTemplate.dbc,File->Create Database,启动后,选择选择目录及文件名,进行保存..右键 Network nodes->New ,进行网络节点的定义,这里只需要填写Name即可,例如:Node_A然后添加Node_B,完成后如下图,这样在Network nodes目录下面添加出来两个节点DLCIDMessages->New,CAN节点添加完成后,下一步添加消息,右键这是需要定义名称,,等信息,如下:. .然后在Transmitters页面,点击Add按钮,添加Node_A为发送节点,意思就是说,此消息是从Node_A节点发送出来的其实还有一种方法就是,此时暂时不定义发送节点,然后直接以拖曳的方式拖曳到发送节点上,功能上是一样的有了消息,消息里携带的东西自然是信号咯,那么我们开始创建一个信号 Signals->New,右键填写如下信息..用0和1来表示开关信号状态似乎还不是很直观,我们可以使用on和off来表示就好了,于是View->Value Tables,右键空白处->New,键入如下信息:..定义好了之后,还需要跟信号进行关联。
CANOE入门到精通CANOE系列教程记录2

04
针对其他常见问题, 可以参考软件的帮 助文档或在线论坛 寻求帮助和解决方 案。
03
深入了解CAN通信原理及协议 规范
Chapter
CAN总线通信原理简介
CAN总线基本概念
CAN(Controller Area Network)即控制器局域网,是一种用于实时应用的串行 通讯协议总线,它可以使用双绞线来传输信号,是世界上应用最广泛的现场总线之 一。
主要功能特点与应用领域
灵活的仿真功能
支持多种CAN网络节点的仿真,包括 ECU、传感器和执行器等。
强大的监控能力
实时监测CAN网络的通信状态,包括报 文传输、信号变化和错误处理等。
主要功能特点与应用领域
丰富的分析工具
提供多种分析工具,如报文解析、信 号提取、数据统计和图形化展示等。
易于集成的接口
参数调整方法
针对不同的应用场景和项目需求,可以通过调整CANOE软件中的相关参数来实现对CAN总线通信性能的 优化。例如,可以通过调整波特率和采样点来提高通信速率和稳定性;通过选择不同的帧类型和标识符来 实现对不同节点和数据的区分和识别。
案例分析:实际项目中的应用
实际项目案例介绍
以某汽车电子控制系统为例,该系统采用CAN总线进行各个控制单元之间的通信。通 过使用CANOE软件对该系统进行开发和测试,可以实现对各个控制单元之间通信数据
数据存储和备份
03
将采集到的数据存储在本地或远程服务器上,并进行备
份,以防止数据丢失。
数据处理策略探讨
数据清洗
对采集到的数据进行清洗,去除重复、无效或异常数据,确保数 据的准确性和可靠性。
数据转换
将数据转换为适合分析的格式,如将原始数据转换为CSV、 Excel或数据库格式等。
参数化桥梁案例
参数化桥梁案例:米兰城市高速公路建设项目背景米兰是意大利最大的城市,也是欧洲最重要的商业和金融中心之一。
随着城市人口的增加和经济的发展,交通拥堵问题日益严重,特别是城市周边地区与市中心之间的交通瓶颈。
为了解决这一问题,米兰政府决定修建一条新的高速公路连接城市周边地区和市中心。
过程需求分析在开始项目前,米兰政府组织了一系列会议和讨论,与相关利益相关方进行沟通,并收集了各方对于该项目的需求和期望。
通过需求分析,政府确定了以下几个关键需求: - 提高城市周边地区与市中心之间的交通效率; - 缓解交通拥堵问题; - 降低车辆排放量,改善环境质量。
方案设计基于需求分析结果,政府决定实施一项具有代表性和启发性的参数化桥梁设计方案。
该方案将通过采用可变形参数化桥梁技术来提高施工效率、降低成本,并能够适应不同地理环境的变化。
参数化桥梁设计参数化桥梁设计是一种基于计算机模型和数学算法的创新设计方法。
通过定义一系列参数和约束条件,可以自动生成不同形状和尺寸的桥梁设计方案。
在米兰城市高速公路建设项目中,工程师们使用参数化桥梁设计软件,根据实际情况输入相关参数,例如桥梁跨度、荷载要求、地质条件等,软件会自动生成多个符合要求的桥梁设计方案。
施工过程在桥梁施工过程中,采用了预制构件和装配式施工技术。
这种技术可以大大减少现场施工时间和人力成本,并且可以提高施工质量和安全性。
通过参数化桥梁设计方案,每个构件都可以根据需要进行调整,以适应不同位置的要求。
结果米兰城市高速公路建设项目于2022年完工,并取得了显著的成果: 1. 交通效率提高:新建的高速公路极大地缓解了市区周边道路的交通压力,缩短了通勤时间。
2. 交通拥堵问题减轻:高速公路的建设减少了市区周边地区的交通拥堵,改善了道路通行状况。
3. 环境质量改善:新建的高速公路设计充分考虑环境保护要求,采用了低碳材料和绿色施工技术,有效降低了车辆排放量。
4. 成本控制:通过参数化桥梁设计和装配式施工技术,项目实现了施工效率的提高和成本的降低。
超经典CANoe工程案例

CANoe 入门 Step by step系列(一)基础应用CANoe是Vector公司的针对汽车电子行业的总线分析工具,现在我用CANoe7.6版本进行介绍,其他版本功能基本差不多。
硬件我使用的是CAN case XL.1,CANoe软件的安装很简单,先装驱动,再装软件。
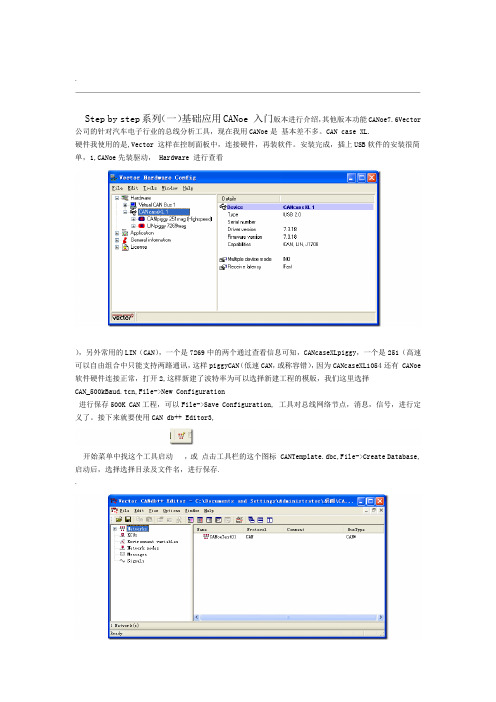
安装完成,插上USB,连接硬件,这样在控制面板中,Vector Hardware 进行查看通过查看信息可知,CANcaseXL中的两个piggy,一个是251(高速CAN),一个是7269(LIN),另外常用的还有1054(低速CAN,或称容错CAN),因为CANcaseXL中只能支持两路通讯,这样piggy可以自由组合2,硬件连接正常,打开CANoe软件File->New Configuration 可以选择新建工程的模版,我们这里选择CAN_500kBaud.tcn,这样新建了波特率为500K CAN工程,可以File->Save Configuration,进行保存3,接下来就要使用CAN db++ Editor工具对总线网络节点,消息,信号,进行定义了。
点击工具栏的这个图标,或开始菜单中找这个工具启动启动后,File->Create Database,选择CANTemplate.dbc,选择目录及文件名,进行保存右键 Network nodes->New ,进行网络节点的定义,这里只需要填写Name即可,例如:Node_A然后添加Node_B,完成后如下图,这样在Network nodes目录下面添加出来两个节点节点添加完成后,下一步添加CAN消息,右键Messages->New,这是需要定义名称,ID,DLC等信息,如下:然后在Transmitters页面,点击Add按钮,添加Node_A为发送节点,意思就是说,此消息是从Node_A节点发送出来的其实还有一种方法就是,此时暂时不定义发送节点,然后直接以拖曳的方式拖曳到发送节点上,功能上是一样的有了消息,消息里携带的东西自然是信号咯,那么我们开始创建一个信号右键Signals->New,填写如下信息信号当然要放到消息中咯,切换到Messages页面,Add 我们刚刚建立的Message_A,当然和上面一样,采用拖曳的方式从Signal到Message中建立关联也是可以的。
CANoe管用实践实例
CANoe简单入门实例利用一个简单的例子,叙述CANoe的基本使用方法。
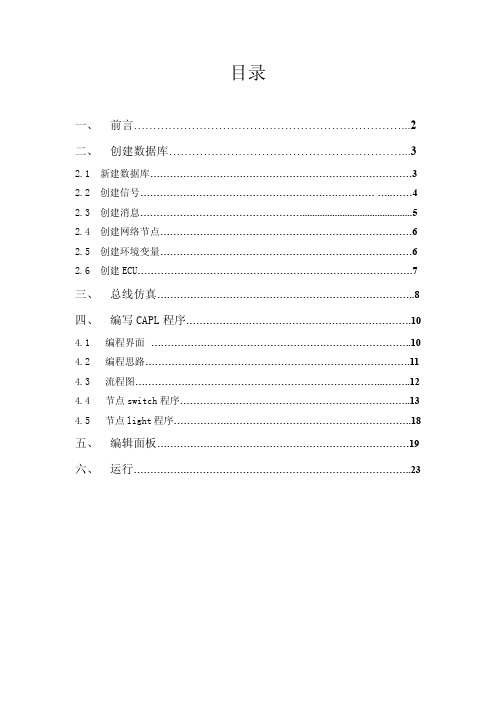
1、新建一个工程|||打开CANoe-File-new configuration-选择CAN_500kBuadTemplate.tcn。
保存的时候新建一个文件夹canno_self_demo,在其中新建一个demo_from_world。
取名main,保存。
2、为这个工程新建一个database|||在上面新建的main.cfg界面上,File-Open CANdb Editor,在Vector Candb++Editor中新建一个database:File-creat database-CANTemplate,取名db保存在emo_from_world中新建的db++文件夹中。
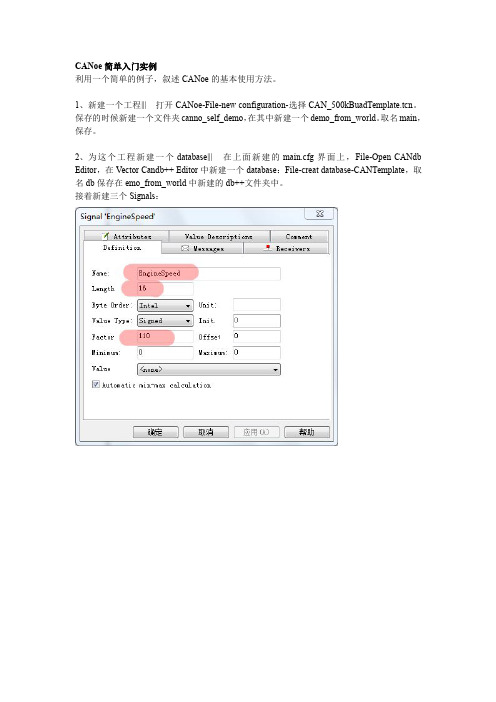
接着新建三个Signals:NEW两个Messages:由于Signals需要放到Messages中才能够传输,所以:而,Singles在Message中需要有很多位置可以负载,我们需要确定一下位置,我们可以在Message中设置Signals的位置(可以拖动)如下:Message从哪里发出来?所以需要在Network nodes中来new两个ECU,如下:并且,把这个ECU操作的Messages带进来:ECU2同样的操作:Ok,db大部分的工作做完了。
解释一下:Signals中间有三个信号,分别是引擎的速度,引擎的温度,以及齿轮值。
Messages中两个消息,一个负载这引擎的信号,一个负载齿轮的信号。
这两个分别由两个ECU来发出,ECU1、ECU2。
那么,这里能够显著变化的就是速度温度齿轮值的变化,所以我们新建一个控制面板来对着三个信号进行控制,那么,我们就需要新建三个环境变量来与之对应。
????怎么解释:::::疑惑1。
在Environment variables right click-new:三个变量都一样。
此时,database我们操作完成。
canoe 测试用例

canoe 测试用例Canoe 测试用例概述:Canoe 是一款用于嵌入式系统开发的全面且易用的测试工具。
本文将介绍 Canoe 的测试用例,包括测试场景、测试步骤和预期结果,旨在帮助开发人员更好地利用 Canoe 进行系统测试。
一、测试用例1:CAN 总线通信测试场景描述:在嵌入式系统中,CAN 总线通信是非常常见的一种通信方式。
为了验证系统的 CAN 总线通信功能是否正常,我们可以使用 Canoe 进行测试。
测试步骤:1. 打开 Canoe 软件,并创建一个新的项目。
2. 在项目中添加两个节点,分别作为发送端和接收端。
3. 配置发送端节点的 CAN 通信参数,包括波特率、帧格式等。
4. 配置接收端节点的 CAN 通信参数,确保与发送端一致。
5. 在发送端节点上创建一个发送消息。
6. 在接收端节点上监听 CAN 总线,确保能够接收到发送的消息。
预期结果:1. 发送端能够成功发送消息到 CAN 总线。
2. 接收端能够成功接收到发送的消息,并显示在 Canoe 软件的接收消息窗口中。
二、测试用例2:网络通信测试场景描述:嵌入式系统中的网络通信功能非常重要。
为了验证系统的网络通信功能是否正常,我们可以使用 Canoe 进行测试。
测试步骤:1. 打开 Canoe 软件,并创建一个新的项目。
2. 在项目中添加一个节点作为网络服务器。
3. 配置服务器节点的网络参数,包括 IP 地址、端口号等。
4. 在服务器节点上创建一个监听任务,用于接收客户端的连接请求和消息。
5. 在项目中添加一个节点作为网络客户端。
6. 配置客户端节点的网络参数,确保与服务器节点相互可达。
7. 在客户端节点上创建一个发送任务,向服务器节点发送消息。
预期结果:1. 服务器节点能够成功创建监听任务,并等待客户端的连接请求。
2. 客户端节点能够成功连接到服务器节点。
3. 客户端节点能够成功发送消息到服务器节点。
4. 服务器节点能够成功接收到客户端发送的消息,并显示在 Canoe 软件的接收消息窗口中。
CANoe从入门到精通保姆级教程(二)

CANoe软件概述
CANoe是一款由Vector公司开发的CAN网络开发和测试工具,支持CAN 、LIN、FlexRay等多种汽车通信网络。
它提供了强大的仿真、测试、分析和诊断功能,适用于汽车电子领域的开 发、测试和验证。
CANoe具有直观易用的图形界面和丰富的功能模块,方便用户快速上手 和高效工作。
CANoe在汽车电子领域应用
车载网络开发与测试
CANoe可用于开发和测试车载 CAN网络,包括节点仿真、消 息发送与接收、错误注入等。
ECU开发与测试
在ECU开发过程中,CANoe可 用于实现ECU的仿真、测试和 验证,支持多种ECU接口和通 信协议。
故障诊断与排除
CANoe提供了强大的故障诊断 和排除功能,可帮助工程师快 速定位和解决问题。
案例背景介绍
介绍某车型UDS诊断服务开发的背景和 需求。
遇到的问题及解决方案
列举在开发过程中遇到的问题以及采 取的解决方案。
诊断服务开发过程
详细描述该车型UDS诊断服务的开发 过程,包括协议设计、服务开发、测 试和验证等步骤。
经验教训总结
总结在该车型UDS诊断服务开发过程 中的经验教训,为类似项目的开发提 供参考。
解决方案
针对该故障节点进行排查和修复,重新配置节点参数和通信协议,确保消息发送和接收正 常。经过修复后,车辆恢复正常启动,仪表盘指示灯也恢复正常。
PART 03
诊断服务开发与调试技巧
REPORTING
UDS诊断服务概述及开发流程
UDS诊断服务概述
确定诊断需求
设计诊断协议
开发诊断服务
测试与验证
UDS(Unified Diagnostic Services) 是一种标准化的汽车诊 断通信协议,用于实现 ECU(电子控制单元) 之间或外部测试设备与 ECU之间的诊断通信。
CANoe仿真流程实例
目录一、前言 (2)二、创建数据库 (3)2.1新建数据库 (3)2.2创建信号 (4)2.3创建消息 (5)2.4创建网络节点 (6)2.5创建环境变量 (6)2.6创建ECU (7)三、总线仿真 (8)四、编写CAPL程序 (10)4.1编程界面 (10)4.2编程思路 (11)4.3流程图 (12)4.4节点switch程序 (13)4.5节点light程序 (18)五、编辑面板 (19)六、运行 (23)一、前言CANoe是德国Vector公司开发的一套通用的CAN总线系统开发、测试和分析工具。
这个文档的目的是通过一个交通灯的例子帮助大家熟悉CANoe的使用流程。
首先简要介绍下例子的内容:这个例子仿真的是十字路口的交通灯。
我们要做到打开交通灯的开关后,红灯亮3秒钟后熄灭,接着绿灯亮3秒钟后熄灭,然后黄灯亮1秒钟后熄灭,接入下一个循环红灯亮。
当交通灯的开关关闭的时候,3s 3s 1s3个灯都熄灭,也可以通过输入“a”来停止交通灯的工作,相当于遥控开关。
说明:实际的交通灯工作时间远大于3秒钟(1秒钟),而在例子中我并没有按照实际的交通灯工作时间来设计的,把循环时间减少为的是方便大家观察3个灯的交替工作。
二、创建数据库对系统的仿真首先要建立系统的数据库,包括在总线上通讯的节点,及节点发送和接受的消息,消息里的信号和模拟真实环境的环境变量。
通过以下步骤创建数据库:2.1 新建数据库打开File→Open Candb Editor或者直接在工具栏里单击按钮就可以进入数据库编辑器。
打开File→Create Database选择CANoe Template.dbc,选择保存路径(我的保存路径是E:\vector\test5 \test5.dbc)2.2 创建信号在这个例子中,总线上并没有灯的反馈信息,只有一个总的开关信号和3个灯控制信号。
右键单击Signal→New... →Definition注:未定义的采用默认值(下同)。
超经典CANoe工程案例

CANoe 入门Step by step系列(一)基础应用CANoe是Vector公司的针对汽车电子行业的总线分析工具,现在我用CANoe7.6版本进行介绍,其他版本功能基本差不多。
硬件我使用的是CAN case XL.1,CANoe软件的安装很简单,先装驱动,再装软件。
安装完成,插上USB,连接硬件,这样在控制面板中,Vector Hardware 进行查看通过查看信息可知,CANcaseXL中的两个piggy,一个是251(高速CAN),一个是7269(LIN),另外常用的还有1054(低速CAN,或称容错CAN),因为CANcaseXL中只能支持两路通讯,这样piggy 可以自由组合2,硬件连接正常,打开CANoe软件File->New Configuration 可以选择新建工程的模版,我们这里选择CAN_500kBaud.tcn,这样新建了波特率为500K CAN工程,可以File->Save Configuration,进行保存3,接下来就要使用CAN db++ Editor工具对总线网络节点,消息,信号,进行定义了。
点击工具栏的这个图标???,或开始菜单中找这个工具启动启动后,File->Create Database,选择CANTemplate.dbc,选择目录及文件名,进行保存右键Network nodes->New ,进行网络节点的定义,这里只需要填写Name即可,例如:Node_A然后添加Node_B,完成后如下图,这样在Network nodes目录下面添加出来两个节点节点添加完成后,下一步添加CAN消息,右键Messages->New,这是需要定义名称,ID,DLC等信息,如下:然后在Transmitters页面,点击Add按钮,添加Node_A为发送节点,意思就是说,此消息是从Node_A 节点发送出来的其实还有一种方法就是,此时暂时不定义发送节点,然后直接以拖曳的方式拖曳到发送节点上,功能上是一样的有了消息,消息里携带的东西自然是信号咯,那么我们开始创建一个信号右键Signals->New,填写如下信息信号当然要放到消息中咯,切换到Messages页面,Add 我们刚刚建立的Message_A,当然和上面一样,采用拖曳的方式从Signal到Message中建立关联也是可以的。
基于CANoe的CAN总线设计基础与简例

基于CANoe的CAN总线设计基础与简例基于CANoe的CAN总线设计基础与简例CANoe概述CANoe是德国Vecto:公司开发的一套通用的CAN总线系统的开发、测试和分析工具。
CANoe的主要组成部分和各自功能为:●CANdb++编辑器:用CANdb++编辑器可以创建或编辑数据库文件(*.dbc)。
数据库文件中包括了CANoe所用到的信号的信息,这当中包括了报文和信号的网络节点和符号名称,以及环境变量等信息。
●CAPL浏览器:利用CAPL浏览器可以创建用于测量和模拟面板的CAPL程序。
因为数据库的应用,在编程时可以使用直观的报文和信号的名称,而不必使用二进制代码的报文头和数据。
●CANoe主程序:用于测量和模拟CAN系统。
通过File/Database菜单,可以在主程序中关联一个或多个数据库。
●面板编辑器:通过面板编辑器可以创建面板。
面板的作用是作为用户和在CANoe里的模拟面板里被模拟的网络节点的I/O接口。
除了标准按钮和开关,在面板编辑器中也可使用位图作为显示和控制器件。
可以使用任意的位图编辑软件创建合适的位图,然后用十面板编辑器。
任何显示和控制兀件都要和数据库中的环境变量关联好,这样CAPL程序可以在CANoe主程序中读写显示和控制兀件。
使用CANoe进行开发的三个阶段使用CANoe的开发过程可以分为3个阶段:第一个阶段是利用数字仿真进行网络需求分析和设计阶段。
该阶段首先要定义网络里的通讯需求,包括:需要几个节点;在网络中要发送多少个报文;数据从哪个节点传输到哪个节点;每个报文的具体组成;有哪些外部的输入输出。
然后,利用网络数据库工具CANdb++建立起CAN通讯数据库。
接下来,建立网络拓扑结构,选择总线的波特率,定义节点的网络行为,使用CANoe建立各个网络节点的模型,并通过仿真来预估在设定波特率情况下的总线负载和延迟。
通过第一个阶段的仿真可以检验各个节点功能的完善性和网络的合理性,也可以监控网络负载和延迟。
canoe报文收发测试实例

canoe报文收发测试实例英文回答:Canoe is a powerful tool used for testing and simulating communication protocols in various industries such as automotive, aerospace, and telecommunications. It provides a user-friendly interface for sending and receiving messages between different nodes or devices. In this article, I will discuss a test scenario for Canoe message exchange.To start with, let's imagine a scenario where we have two nodes, Node A and Node B, connected through a CAN bus. Node A sends a message to Node B, and Node B responds with a message back to Node A. This exchange can be tested using Canoe.First, we need to set up the Canoe environment by configuring the nodes and the communication channel. We define the CAN bus parameters, such as baud rate andmessage format. Then, we create the message database, which includes the message IDs, signals, and their respective values.Next, we can start the test by sending a message from Node A to Node B. We select the message from the database and specify the values for the signals. Canoe then transmits the message over the CAN bus to Node B. We can verify the successful transmission by checking the message log in Canoe.Once Node B receives the message, it processes it and generates a response. We can simulate this response in Canoe by configuring Node B to send a predefined message back to Node A. Again, we select the message from the database and set the signal values accordingly. Canoe sends the response message, and we can verify its reception in the message log.In addition to simple message exchange, Canoe provides advanced features for testing complex scenarios. For example, we can simulate error conditions by introducingfaulty messages or altering the bus parameters. We can also simulate network congestion by increasing the message load on the bus.Canoe also allows us to analyze the message traffic by providing various visualization and analysis tools. We can view the message log, plot signal values over time, and generate reports for further analysis.中文回答:Canoe是一个强大的工具,用于在汽车、航空航天和电信等各个行业中测试和模拟通信协议。
canoe和python实例 -回复

canoe和python实例-回复标题:使用Python探索轻快的划船之乐导语:在我们的日常生活中,有许多机会和场景可以让我们去体验大自然的美妙和宁静。
而划船无疑是其中一种令人兴奋且令人放松的方式。
本文将介绍如何使用Python探索和可视化划船数据,帮助我们更好地了解这项运动,并提供一个实例来解释这个过程。
引言:划船是一项需要良好合作和均衡技巧的运动。
随着技术的进步,我们可以通过各种仪器来记录和分析划船的数据,以进一步提高我们的技巧和效率。
而Python作为一种强大的编程语言,为我们提供了许多工具和资源来帮助我们分析和可视化这些数据。
第一步:收集划船数据首先,我们需要一艘划艇和相应的传感器或设备来记录划船过程中的数据。
这些设备可以是GPS、加速度计甚至是心率监测器等。
这些设备记录的数据将成为我们在分析和可视化过程中使用的数据集。
第二步:使用Python读取和处理数据在我们开始分析数据之前,我们需要使用Python读取和处理数据。
对于不同的传感器和设备,有许多不同的数据格式和方法来读取和处理数据。
Python提供了丰富的库和工具来帮助我们处理各种数据格式,如CSV、JSON等。
我们可以使用pandas库来读取和处理数据,并使用numpy库来进行数值计算和处理。
第三步:数据清理和预处理在我们开始分析数据之前,我们需要对数据进行清理和预处理。
这包括填充缺失值、去除异常值以及进行数据平滑等。
Python的pandas库提供了许多函数和方法来帮助我们进行数据清理和预处理,如dropna()、fillna()和rolling()等。
通过这些函数和方法,我们可以轻松地处理数据集中的缺失值和异常值,并平滑我们的数据。
第四步:数据分析和可视化一旦我们完成了数据的清理和预处理,我们就可以开始进行数据分析和可视化了。
Python提供了许多强大的库和工具来帮助我们进行数据分析和可视化,如matplotlib、seaborn和plotly等。
CANoe仿真工程

CANoe仿真工程操作面板是长这样的,总线上挂了两个模块,一个是开关,一个是指示灯。
这里不去考虑鼠标点击开关的时候操作系统做的哪些乱七八糟的事情,虽然我们看见的按钮开与闭显示在屏幕上,操作系统也默默做了很多很多细枝末节的进程调度。
逻辑上,我们只认为是开关打开和关闭是一个只有两个状态的变量,这里把变量定义为系统变量,这样读起来写起来会方便一些。
现在仿真工程要做的就是将两个模块挂到总线上,响应两个事件,一个是系统变量svSwitch的改变,一个是收到报文。
开关变量改变后,事件函数将系统变量svSwitch的当前值读出来,复制给报文的信号bsSwitch,然后再将报文输出到总线上。
收到报文后,相关的事件函数负责将报文的信号读出来,赋值给系统变量svLight,这个时候我们就可以看见灯泡的颜色改变,表示被打开或者被关闭。
在干完教程所说的一切之后我非常荣幸遇到了应答码错误,问题产生的原因是发送节点在发送完15位CRC校验码和CRC分隔符之后,在ACK SLot上发送一位隐形电平,接收节点此时在 ACK SLot上发送一位显性电平作为ACK响应,之后发送节点发送ACK分隔符以及EOF,没有收到ACK响应的即not ACK。
解决办法,有两个,感谢同事的帮忙。
先说可靠的,勾选TX Self-ACK。
(只管发报文就好了)再说不可靠的,我按照同事的提醒,连上了EPS作为真实节点,当然这里还需要修改通道,需要把canape,ees以及canoe都挂到新的端口下面,默认这个时候EPS是被唤醒了的。
这个时候运行我自己的仿真工程,就会检测到很多莫名其妙的报文,看解析出来的ID就会发现和原本定义的差别很大。
但是这个不重要,重要的是,这个时候不再报ACK应答错误了,真实节点应答了,但是真实节点并不需要开关节点发出的报文。
但是不管怎样,报文是发出去了,发出去了之后,灯泡节点自然而然就响应了。
这个时候,我就想关掉EPS试试看,然后就非常荣幸遇到了第二个错误Stuff Error,填充错误,节点在检测对象的时候违反填充规则,出现连续6位或者连续6位以上相同电平,判定为填充错误。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
CANoe 入门Step by step系列(一)基础应用CANoe是Vector公司的针对汽车电子行业的总线分析工具,现在我用CANoe7.6版本进行介绍,其他版本功能基本差不多。
硬件我使用的是CAN case XL.1,CANoe软件的安装很简单,先装驱动,再装软件。
安装完成,插上USB,连接硬件,这样在控制面板中,Vector Hardware 进行查看通过查看信息可知,CANcaseXL中的两个piggy,一个是251(高速CAN),一个是7269(LIN),另外常用的还有1054(低速CAN,或称容错CAN),因为CANcaseXL中只能支持两路通讯,这样piggy可以自由组合2,硬件连接正常,打开CANoe软件File->New Configuration 可以选择新建工程的模版,我们这里选择CAN_500kBaud.tcn,这样新建了波特率为500K CAN工程,可以File->Save Configuration,进行保存3,接下来就要使用CAN db++ Editor工具对总线网络节点,消息,信号,进行定义了。
点击工具栏的这个图标,或开始菜单中找这个工具启动启动后,File->Create Database,选择CANTemplate.dbc,选择目录及文件名,进行保存右键Network nodes->New ,进行网络节点的定义,这里只需要填写Name即可,例如:Node_A然后添加Node_B,完成后如下图,这样在Network nodes目录下面添加出来两个节点节点添加完成后,下一步添加CAN消息,右键Messages->New,这是需要定义名称,ID,DLC等信息,如下:然后在Transmitters页面,点击Add按钮,添加Node_A为发送节点,意思就是说,此消息是从Node_A 节点发送出来的其实还有一种方法就是,此时暂时不定义发送节点,然后直接以拖曳的方式拖曳到发送节点上,功能上是一样的有了消息,消息里携带的东西自然是信号咯,那么我们开始创建一个信号右键Signals->New,填写如下信息信号当然要放到消息中咯,切换到Messages页面,Add 我们刚刚建立的Message_A,当然和上面一样,采用拖曳的方式从Signal到Message中建立关联也是可以的。
上面信息中Intel模式和Motorola格式的区别如下:用0和1来表示开关信号状态似乎还不是很直观,我们可以使用on和off来表示就好了,于是View->Value Tables,右键空白处->New,键入如下信息:定义好了之后,还需要跟信号进行关联。
右键需要关联的信号->Edit Signal,Value Table 中关联刚才建立的那个Value Talbe项这样一个信号就完成了,另外还需要加一个类似的信号,可以点击Signal根目录,在右边选择Signal复制,及粘贴,然后双击复制好的Signal后,进行一些编辑,然后用上面方法关联Message即可快速建立第二个信号了,是不是很方便继续添加第三个信号,Indicator_A,跟上面一样,但是我这个信号想放在Message的第二个字节的位置,怎么办?其实很简单,有两种方法:第一种,右键已经关联好的,即在Message目录下的信号,Edit mapped signal,在弹出的对话框中的Startbit中填8,这样就这个信号就跑到该消息的第二个字节中了。
第二种方法,右键该消息->Edit Message,在Layout页面中,拖动信号的色块进行移动以上Message_A消息及消息下所定义已经定义完成如法炮制另外一个消息Message_B,完成后如下图。
下面创建环境变量,右键Environment variables陆续把其他环境变量加好,Indicator的Access属性为Write哦,加完如下:数据库的定义这款基本上就OK了。
保存后关闭CANdb++ Editor,回到CANoe主程序中。
请在Configuration->Options->Configuration Settings->Channel Usage 设置使用的通讯通道,因为这个只需要1路CAN,其他都设置为0就可以。
点这个选项页面可出现Simulate Setup 界面右键Databases->Add,把刚刚创建好的dbc给加载进来,之后再连线上右键->Insert Network Node结果如下:右键这个ECU模块->Configuration,在Network Node 选择Node_A,完成,然后添加Node_B完成后如下图,这样dbc与CANoe的关联就好了。
4,界面设计网络及相应的关系设置好之后,应该设计界面了,一个良好的界面可以直观的显示及控制各种信号。
界面设计工具有两种:一种是Panel Designer,新的界面设计工具,另外一种是Panel Editor是老的界面设计工具,无论采用何种工具设计的界面,都可以和CANoe很好的兼容,没有问题。
下面我们先用第一种界面设计工具来完成界面的设计点击工具栏的这个图标或File->Open Panel Designer,打开界面编辑器,界面如下:保存一下该界面,起名为Panel_A,一个空的界面上可以放置右上边若干组件。
放置好之后,选中界面上的组件的时候,右下侧回显示当前选中的组件的属性,可以更改相应的大小位置等,但最重要的是Symbol属性,这里要说一下,每个界面组件也都需要与CANoe关联,否则单纯的界面是没有任何意义的,关联主要是信号和环境变量,在Symbol属性的Symbol Filter属性中可以进行选择,我们这里关联的是环境变量,所以选择Environment Variable,然后再点击上面的Symbol属性,然后在弹出的页面中选择相应关联的变量完成后可以按同样的方法设计Panel_B,也可以Save As 的方法快速建立同样的Panel但是与环境变量的关联和界面的文字需要进行微调。
这样两个Panel都已完成。
也已经建立了与CANoe之间的关联。
5,CAPL编程所有的前期准备工作和组装工作都已完成,现在需要编写程序使整个系统有机的运行起来。
回到CANoe的Simulation Setup界面,然后点击Node_A模块的,像铅笔一样的图标,填写程序名称,这里Node_A,然后打开编程界面,完成以下程序。
然后完成Node_B程序。
小技巧:如果背不出具体的消息名称,信号名称或环境变量,可以右键程序空白处,你会得到意外的惊喜,试试看。
OK大功告成6,运行现在点击工具栏,运行程序。
注意:这里表示实际的网络,所有的消息是发送到物理的网络上的,如果只是验证程序,设置成这样就可以了。
完整运行结果如下:就是这样,一步一步的,我们完成了第一个完整的CANoe应用工程,虽然这只是入门第一步,但整个CANoe 的开发流程基本涵盖,如果能跑出上面的运行结果,依然能够给我们很多的惊喜。
我们需要这样的惊喜,因为这是我们继续前行的动力。
CANoe 入门Step by step系列(二)CAPL编程CAPL就是Communication Application Programming Laguage的缩写,CAPL类似于C语言的语法,因此所有的语法请参考C语言教程,这里不在这里进行详述,关于C语言,毫无疑问的,首先推荐大家看谭浩强老师的书,经典中的经典,看完这本C语言应该没问题了。
CAPL在CANoe中起到重要的作用,他将所有的部分联系起来(请看下图)现在我们给予上一节的基础上,来着重介绍CAPL编程。
CAPL语法是C语言的,又有一些C++的特性,this指针,事件等,对于事件的理解可以学习任意一种面对对象语言,首推C#.NET,可以参考我的博客学习,当然这个似乎比CAPL本身更加难,事件也更加多,但这并不妨碍对事件的理解,其中的事件类型如下图:下面来几个小例子帮助理解来个CANoe版本的hello world!来兴奋一小下吧。
开整~在打开CANoe,新建个工程,在Simulation Setup中加个Network node ,点铅笔,忘了吗,上一节刚讲过,右键Start->New,键入如下代码编译后,关闭CAPL Brower。
运行CANoe工程,结果如下,哇塞成功咯,好有成就感啊。
这个例子似乎跟CAN通讯没啥太大关系啊,好,我们接下来再做一个例子运行结果如下,按键盘b键,将发送一个CAN消息,连dlc是啥都不知道的同学,推荐先学习一下CAN基础知识,推荐瑞萨公司的《CAN入门书》,讲的非常的好。
运行刚刚的那个例子你会发现,按一下b,只发送一条消息,但在实际应用中CAN消息都是循环连续发送的,我们要对刚刚的程序进行一些修改。
完成这样的功能。
程序如下:variables{message 0x400 msgA = {dlc=1};mstimer timerA;int conditionA = 0;}on key 'a'{conditionA = !conditionA;if(conditionA ==1){setTimer(timerA,200);}}on timer timerA{if(conditionA==1){setTimer(timerA,200);}msgA.byte(0) = msgA.byte(0)-1;output(msgA);}运行结果如下:按A键,Timer启动,发送消息接下来我们一起来看总结一下CAPL编程的要点:CAPL编程的学习,需要通过不断在实践中的积累,此外别无他法。
以上真真儿的只是入门,如果你真心看过,不如你真心写过。
CANoe 入门Step by step系列(三)简单例子的剖析最好的学习方式是什么?模仿。
有人会问,那不是山寨么?但是我认为,那是模仿的初级阶段,当把别人最好的设计已经融化到自己的血液里,变成自己的东西,而灵活运用的时候,才是真正高级阶段。
正所谓画虎画皮难画骨。
但初级阶段仍然是必须经历的过程,他会使你在达到高级阶段的过程中少走很多弯路,下面我们来迈出这一步。
先研究一下别人的简单例子。
最好的例子莫过于Vector本身的Demo了,这个在安装完CANoe之后就会被自动安装。
先看最简单的一个,名字叫Easy,但并不简单哦,比我们之前介绍的所有的东西都整合再一起了,很简单,但很全面。
但是假如你说,这个我自己也可以完全自己写出来(并不是仅仅是看懂哦),那么我可以肯定的说,在工作中,你完全可以胜任一般的任务要求哦~,剩下的只是工作量的问题了。