UCMap地图配置过程详解
MapInfo+MapX培训教程

MapInfo+MapX培训教程一、引言地理信息系统(GIS)作为处理、分析、展示地理空间数据的重要工具,已经在多个领域得到了广泛应用。
MapInfo和MapX是两款具有代表性的GIS软件产品,它们凭借强大的功能、友好的界面和易用性,成为了众多用户的首选。
本教程旨在帮助读者快速掌握MapInfo和MapX的基本操作,为深入学习和应用奠定基础。
二、MapInfo基础操作1.软件安装与启动(1)MapInfo正式版安装包;(2)按照提示完成安装过程;(3)启动MapInfo,熟悉软件界面。
2.地图操作(1)打开地图:通过“文件”菜单或工具栏打开地图文件;(2)地图浏览:使用工具栏上的放大、缩小、平移等工具进行地图浏览;(3)地图显示设置:调整图层显示顺序、设置图层透明度等;(4)地图输出:将地图导出为图片或其他格式。
3.数据操作(1)创建数据表:新建数据表,设置字段类型和属性;(2)数据导入:将外部数据导入MapInfo,如Excel、CSV 等;(3)数据编辑:添加、删除、修改数据表中的记录;(4)数据查询:通过SQL语句查询数据表中的信息。
4.空间分析(1)缓冲区分析:为地图上的对象创建缓冲区;(2)叠加分析:将两个图层进行叠加,分析空间关系;(3)网络分析:计算地图上的路径、距离等。
三、MapX基础操作1.软件集成与调用(1)在开发环境中安装MapX插件;(2)通过编程接口调用MapX功能;(3)熟悉MapX控件及其属性、方法、事件。
2.地图操作(1)加载地图:将地图文件加载到MapX控件中;(2)地图浏览:实现地图的放大、缩小、平移等操作;(3)地图显示设置:调整图层显示顺序、设置图层透明度等;(4)地图输出:将地图导出为图片或其他格式。
3.数据操作(1)创建数据表:在MapX中新建数据表,设置字段类型和属性;(2)数据导入:将外部数据导入MapX,如Excel、CSV等;(3)数据编辑:添加、删除、修改数据表中的记录;(4)数据查询:通过SQL语句查询数据表中的信息。
安卓导航之Oruxmaps系列教程
安卓导航之Oruxmaps系列教程1楼一、Oruxmaps使用入门教程。
17楼二、PC端ORUXMAPS离线地图的制作。
18楼三、PC端导航规划路线的制作。
19楼四、MOBAC图源文件的制作。
一、Oruxmaps使用入门教程。
本系列教程以网友qsccsqwar的教程为基础,在征得其同意后,针对越野行车所需进行了部分增添、删减,主要去除了一部分较专业的内容,增添更改了适合越野行车使用的内容。
在此再次感谢qsccsqwar。
(E族论坛现在好烦,帐号要不停刷新。
导致一个长帖子都没有心情去编辑,总是发布失败。
烦死了。
)一、初识ORUXMAPS。
Ourxmaps是个比较好用的安卓导航程序。
对于使用卫星图进行越野,比较适用。
(不要问我苹果上用神马导航,我木有苹果的设备,不懂)。
ORUXMAPS,可以使用自己的地图,DIY自己的路线。
软件在网上随便百度一下就能找到。
如果不想太麻烦,搞地图源神马的,就不要去下载神马最新版本的了。
推荐下载5.5.3版本,自带GOOGLE 地图源。
之后的可能因为版权神马的原因不带了。
喜欢自己搞地图源就无所谓神马版本了。
安装好的程序,图标如下(版本不同,图标可能不同):点击上面那个图标,就是上面那个,对,就是这个,点击打开,进入软件主界面:界面简洁明了。
上部是导航、地图管理;这条的下面是状态栏,标识了目前开启的内容,状态栏右侧是指北标记;主界面左侧是缩放、移动、测距工具栏;右侧是开启GPS,开启航迹记录,移动工具,雷达面板(数据界面)和3D视图;底部的参数是比例尺、地图层级、缩放比例。
点击菜单按钮(就是你的实体键,菜单键),弹出的主菜单:基本不需要细讲吧,都点击看看,全是汉语,应该很容易理解的。
好了,初始Ourxmaps的任务完毕,什么?还没认识?好吧,剩下的详细介绍请问度娘。
空话我就不复制粘贴了。
欢迎加入QQ群E族GPS交流 133196362。
二、ourxmaps基本操作安装程序就是为了应用,应用就是操作么,所以我们开始对这个软件进行操作,好废话啊。
UCMAP for Android手机端地图配置教程

UCMAP for Android手机端地图配置教程——飞奔的蜗牛一、PC端配置java环境进入/zh_CN/,下载最新java,并安装。
二、创建地图文件夹如先创建“隆子县平板外业数据”文件夹,影像放在下一级文件夹下,如在“隆子县平板外业数据”内创建“image”文件夹;三、将影像转换为该软件支持的格式打开UCMap for Android\RasterMaker文件夹下的RasterMaker.exe,点击“选择目标文件”选择下载的原始影像,点击“选择保存地点”选择刚才创建的“image”文件夹,再点击“开始转换”即可。
至此,影像已经创建完成,如果不需要转换矢量图,直接看第5步。
四、将矢量图层转换为该软件支持的格式(矢量图的坐标系统必须和影像图坐标系统完全一致)在ArcMap下加载原始影像及需要转换的矢量图,右键查看图层属性,若两者一致,则跳至第五步。
下图影像的坐标为“WGS_1984_Web_Mercator_Auxiliary_Sphere”,将示例中“隆子县县界”矢量图的“GCS_Xian_1980”转为影像的“WGS_1984_Web_Mercator_Auxiliary_Sphere”坐标系。
1.右键查看数据框属性2.将数据框坐标系设置为影像的坐标系,在“数据框属性”——“坐标系”对话框内选择“图层”—— “WGS_1984_Web_Mercator_Auxiliary_Sphere”,确定。
3.右键矢量图层,依次选择“数据”——“导出数据”在导出数据对话框内选“数据框”,设置输出要素位置,确定。
五、配置移动端地图1.新建地图打开UCMap for Android文件夹下的“UCMap地图配置程序for Windows(无cmd窗口).bat”,点击“文件”—— “新建地图”,点击浏览设置创建的“隆子县平板外业数据”文件夹,确定。
2.导入影像点击“导入影像”,依次选择包含第三步创建的“image”文件夹,点击浏览确定。
UCMapforAndroid常见问题解答FAQ

UCMap for Android 常见问题解答FAQ1.UCMap sdk for Android 官方下载地址是?跬步科技。
2.UCMap如何导入shapefile地图?使用UCMap地图配置程序将shapefile格式的地图导入之后,并且设定好样式,生成地图。
得到一个map.ini文件和map.dat文件,以及lib文件夹,将这三个放入设备的存储器里。
在代码中使用mapControl.loadMap("/sdcard/aaa/map.ini",(byte)0);即可加载。
3.UCMap如何新建图层?设备上的无法使用代码新建图层,只有通过使用UCMap地图配置程序才可以新建、删除、修改图层。
4.UCMap如何获得图层属性表字段?首先说明的是,字段信息是保存在FeatureClass里的,而FeatureClass又由Layer来管理,所以要先获得Layer的引用。
ILayer layer=mapControl.getMap().getLayer(0);这样可以得到第一个图层的引用本地矢量格式的情况下layer是ShapefileLayer,所以需要转换ShapefileLayer sLayer=(ShapefileLayer)layer;sLayer.getFeatureClass().getFields();这样就返回全部字段名了,字段个数就是这个数组的length。
5.UCMap如何进行属性字段查询?调用mapControl.searchFeature。
详细用法请参考UCMap for android的API文档中对于这一函数的说明。
6.UCMap如何将要素居中显示?首先你要得到要素的中心点位置,我们假设中心点为:Point pt;那么调用下面的函数,即可将他居中IEnvelope env=mapControl.getExtent();env.centerAt(pt);mapControl.refresh(env);7.UCMap如何编辑修改要素属性数据?将EditFeatureAttTool设置为当前地图工具,即可利用该工具来修改要素的属性数据。
Oruxmaps_导航软件使用说明书解读

0: (2^z - 1 - y)
1: (val + 1)
2: add '/' each 6 characters
3: (x + y ) mod num_servers -->
</onlinemapsource>
从这里可以找到感兴趣的代码,注意尊重知识产权!
注意:Oruxmaps利用内部缓存存储地图上的图像,所以在线浏览过的图像都可以离线使用,而不必再从网络获取。缓存不会永远保存,可通过下面两种方式进行管理:
使用Oruxmaps最简单的方法是打开时用“在线地图”。在主界面上,选择“在线地图”,选择一个地图即可。可用的在线地图配置在这个目录下:Oruxmaps/mapfiles/onlinemapsources.xml
当前可以看到在线的地图,若想获得当前位置,按“航迹”-->“开始GPS”,当收到第一个位置的信号后,地图的焦点会聚集到当前所处位置,这个信号可以是单纯的GPS信号或者手机网络信号(需要设置GPRS)。
下面我们将开始学习“用户手册”,Oruxmaps有丰富的功能,有许多的“设置”、“菜单”等等。
二、地图
Oruxmaps使用专用格式的地图,原因是手机操作系统处理大图片时有一定的局限性。
地图是一个具有地图名称的一个目录,包含以下信息:
1.一个扩展名为.otrk2.xml的文件,含有地图校准信息;
2.一个扩展名为.db的文件或者包含地图图像文件的目录
EPSG:4230 EPSG:23029 EPSG:23030 EPSG:23031
</SRS>
下面是WMS支持的坐标系统,必须选用:EPSG:4326.
导航电子地图激活 升级 操作手册说明书
导航电子地图激活/升级操作手册目录导航电子地图激活/升级操作手册 (1)目录 (2)一、设置电脑IE浏览器 (3)二、地图激活/更新步骤简介 (5)三、首次激活/升级导航电子地图 (5)四、订单查询 (20)附录一:QA (14)附录二:地图公司400服务热线和邮箱 (16)附录三:错误申请序列号之处理办法 (16)附录四:更换导航仪之处理办法 (17)附录五:订单作废申请单 (20)一、设置电脑IE浏览器1.打开IE浏览器,选择浏览器菜单“工具”——“Internet选项…”,如下图:选择“Internet选项”2.在“Internet选项”窗体中,选择“安全”选项卡,选中“受信任的站点”,点击“站点…”按钮,如下图:“站点”按钮3.在“可信站点”窗体中,添加“*”,去掉勾选“对该区域中的所有站点要求服务器验证(https:)”,如下图:添加可信站点去掉“勾选”4.点击“确定”按钮,关闭“可信站点”窗体。
5.在“Internet选项”窗体中,选择“安全”选项卡,选中“受信任的站点”,点击“自定义级别…”按钮,如下图:“自定义级别”按钮6.在“安全设置”窗体中,将“对没有标记为安全的ActiveX控件进行初始化和脚本运行”的“单选框”改为“启用”将单选框改为“启用”7.点击“确定”按钮,关闭“安全设置”窗体。
8.点击“确定”按钮,关闭“Internet选项”窗体。
二、地图激活/更新步骤简介首次激活/升级导航电子地图:1) 经销商操作人员记录车内导航仪序列号;2) 登录指定的地图公司网站,生成激活码并抄录;3) 将SD卡中拷贝对应版本的地图数据,插入导航仪;4)将激活码输入导航仪,激活导航。
注:升级新版本地图是经销商收费项目,由车厂定期结算三、首次激活/升级导航电子地图车主提取购买的车辆时,可以到经销商或维修站申请激活导航电子地图,经销商将指定专人完成导航地图的首次激活工作。
1 记录导航仪序列号【导航序列号获取】面板上按NAVI,进入导航界面,查看导航仪序列号(机器编号):操作人员需要记录下导航仪序列号,然后回到指定电脑前登录地图公司网站,取得合法激活码文件。
在线动态地图平台 用户手册说明书

在线动态地图平台用户手册二〇二〇年12月I 在线动态地图平台目录目录 (I)1 前言 (1)2 手册内容 (1)3 运行环境 (1)4 平台系统概述 (1)4.1 系统功能和技术特点 (2)4.2 数据资源模块 (2)4.3 制作地图模块 (3)4.4 出图打印模块 (4)5 系统操作指南 (4)5.1 数据资源操作说明 (4)5.1.1 公共数据管理 (5)5.1.1.1 公共数据查询 (6)5.1.1.2 公共数据预览 (6)5.1.2 我的数据管理 (7)5.1.2.1 我的数据上传 (7)5.1.2.2 我的数据预览 (8)5.2 制作地图操作说明 (8)5.2.1 自定义地图制作 (9)5.2.1.1 选择数据 (9)5.2.1.2 选择底图 (10)5.2.1.3 选择纸张 (11)5.2.1.4 地图编辑 (11)5.2.2 示例模板地图制作 (16)5.3 出图打印操作说明 (17)5.3.1 整幅导出 (17)5.3.2 分幅导出 (18)1 前言本手册为在线制图平台用户操作手册,手册将详细介绍平台所包括的上传数据、数据查看、制作地图、出图打印等的操作流程,旨在为用户熟悉系统功能、进行业务操作、提高工作效率提供帮助。
2 手册内容本手册内容主要为平台功能模块介绍及其操作流程。
3 运行环境支持IE、Google Chrome、360安全浏览器、Safari、Mozilla Firefox等主流浏览器浏览。
4 平台系统概述在线制图平台是为了克服弱GIS行业地图制图难、传统地图平台难以满足需求等问题所研发的,主要是具有数据改造发布、无极缩放、模板丰富、快速成图、不同尺寸纸张打印、分幅打印等功能的在线动态制图平台。
为方便用户操作、简化登录流程、本平台只需微信扫描二维码即可登录系统,如图4-1所示。
图4-1 在线制图平台入口页面4.1 系统功能和技术特点在线制图平台的硬件环境主要包括有服务器不低于2.3GHZ的4核Inter(R) Xeon(R) 处理器,不低于8G系统内存,不低于100GB存储容量。
MapX教程

详细介绍MapX提供的三维 可视化功能,包括三维场 景构建、三维符号制作、 三维飞行等。
阐述在MapX中构建三维场 景的方法和步骤,包括地 形数据加载、建筑物模型 导入、纹理贴图等。
介绍如何使用MapX的三维 符号制作工具创建自定义 的三维符号,以满足特定 应用场景的需求。
演示如何在MapX中实现三 维飞行模拟功能,包括飞 行路径规划、视角控制、 动态效果展示等。
问题三
数据导入或导出失败
• 解决方案
检查数据格式是否正确,确保导入或导出路径有效。对 于复杂的数据转换,建议使用MapX提供的数据转换工 具。
使用技巧分享,提高工作效率
01
技巧一:快捷键使用
02
• 通过学习和掌握MapX的常用快捷键,可以大大提高工 作效率。例如,使用Ctrl+C和Ctrl+V进行复制和粘贴 ,Ctrl+Z进行撤销等。
1. 在MapX中打开一个新 的地图文档;
导入矢量数据
01
03 02
数据导入方法及步骤演示
3. 在弹出的对话框中选择要导入的矢 量数据文件,点击“打开”;
4. 根据需要设置坐标系和其他参数, 点击“确定”完成导入。
数据导入方法及步骤演示
导入栅格数据 1. 在MapX中打开一个新的地图文档; 2. 选择“文件”菜单下的“导入”选项;
03
数据导入、导出与处理
Chapter
支持的数据格式类型
矢量数据格式
如Shapefile、GeoJSON、KML等;
栅格数据格式
如GeoTIFF、ECW、MrSID等;
数据库格式
如PostGIS、SQL Spatial等。
Server
Spatial、Oracle
Android UCMap研究结果-包含客户端基本功能
UCMap研究结果汇报1.UCMap基础简介2.使用UCMap在线和离线显示Google Maps3.通过shape数据生成矢量地图并显示,即UCMap地图配置过程并显示4.矢量地图与 Google Maps 瓦片地图叠加显示5.在矢量地图与瓦片地图叠加显示之后进行添加元素、移动元素、修改元素属性,查看属性信息,关键字查询,路径查询,开启捕捉,关闭捕捉,导出图层为shape数据。
6.UCMap常用API和功能方法封装7.研究过程中遇到的问题1. UCMap基础简介ucmap 是一款面向3G、支持OGC 标准的移动GIS开发平台,延伸了GIS 在手机端的应用,它采用先进的SOA 架构,支持WMS、WFS、WFS-T、WPS 等OGC 标准。
支持的主要功能:地图浏览,支持地图的放大、缩小、平移;地图渲染,支持地图样式的配置、矢量要素的查询渲染;地图查询,支持属性查询、空间查询、以及属性和空间的混合查询;要素编辑,支持要素的添加、删除、修改,其中包括要素几何的节点编辑、属性编辑修改等;数据缓存,支持瓦片服务器缓存、瓦片更新、客户端缓存、以及矢量数据的本地存储;影像叠加,支持遥感影像数据的叠加,并在其上采集、编辑数据;数据同步,支持移动GIS、WEBGIS、桌面GIS的数据同步,及时获取更新过的最新数据;空间分析,支持空间查询分析基站定位,支持手机基站定位;GPS定位,支持获取手机GPS定位数据,实现GPS定位监控;动态图层,支持动态图层,在底图上叠加动态要素点,比如GPS等动态刷新的点报表分析,支持表格、折线图、饼图、柱状图等统计报表;扩展定制,高可扩展性,视频、图象等采集、显示、上传,与移动MIS、移动OA的无缝集成,以及各种其他服务的组合;跬步API和开发文档下载地址/kuibu/xiazai.asp2.使用UCMap在线显示Google Maps1).新建一个Android工程UCMapProgect,将UCMap的API包libs(./libs)添加到UCMapProgect工程目录,通过Eclipse导入UCMapProgect;2).新建OpenSourceMap.xml(./sdcard/OpenSourceMap.xml),将其拷贝到手机的sdcard根目录<?xml version="1.0" encoding="UTF-8"?><map maxExtent="0,33554432,0,33554432"numberOfLayers="1"center="102.71035,25.045914"> // 地图被加载显示时的初始中心点<layer><type>OpenSourceMap</type>// InitZoomIndex 表示地图加载之后直接从第8 层开始显示,google 的显示比例等级数为19 层,bing 为18 层,从0 开始,<InitZoomIndex>8</InitZoomIndex>// InitMapType为“0”,表示地图加载时以google 地图为数据源;为“1”,表示地图加载时以bing 地图为数据源。
(完整版)MAP安装和配置手册

MAP安装和配置手册实验说明:在本实验中,您将学习如何如何安装配置在MAP8.0(Microsoft Assessment and PlanningToolkit)微软评估规划工具包,并且生成反馈报告等操作,最终实现企业环境中计算机硬件设备的资产收集和系统升级评估实验环境介绍:一、MAP 功能解析微软MAP工具包主要用于企业当前IT架构(硬件和软件)的评估,目的是要明确微软可以为企业的哪些商业需求提供技术帮助。
MAP从早期的Vista硬件评估方案加速程序演化而来,该加速程序可以帮助那些部署了WINDOWS7、WINDOWS8和Office的企业评估桌面运算架构的准备程度。
它由一系列自动工具和使用指导组合而成,在整合规划,服务器迁移或是桌面的准备阶段能加快微软技术被采用的速度。
此前的MAP版本可以实现以下操作:•使用WMI和SNMP和其他机制演示安全无代理网络范围的Windows电脑的硬件和软件目录及其设备。
•对硬件数据和设备兼容性进行全面分析,以便确定WINDOWS,Windows Server,微软Office和微软应用虚拟化等系统迁移的准备程度并且对Hyper-V上物理电脑的整合给予帮助。
•生成准备情况的深度报告,报告中提交了不同系统之间转换情况的详细评估结果,这些描述中还对系统转换或服务器整合提出了建议。
MAP 8.0版本则包含了下列新功能:•界面得到了改进和简化,清点基础架构,评估不同准备方案,生成报告和建议等操作变得比以往更容易。
•支持Windows 7 WINDOWS8和Windows Server的准备评估。
•对不同服务器整合情况的准备评估提供了扩展支持。
•原始设备制造商及合作伙伴对MAP用户界面和转换提议文件进行自定义操作。
该系列的重点是部署Windows 7、WINDOWS8,而MAP 8.0则是能够帮助我们完成桌面转换的一种了不起的工具。
既便如此,MAP 8.0不仅仅可以评估台式电脑是否能运行Windows 7、WINDOWS8而已,它还能实现如下操作:•执行包括SQL Server实例在内的电脑硬件和软件的全面清点。
MapInfo系列教程

规划方案设计与实施
基于MapInfo的规划方案设计
利用MapInfo的空间分析功能,可以对城市空间结构进行深入分析,发现潜在问题和优化方向。在此基础上,可 以设计针对性的规划方案,如土地利用规划、交通规划、公共设施布局规划等。
规划方案的实施与监控
在规划方案实施过程中,MapInfo可以用于监控实施进度和效果。通过定期更新数据和进行空间分析,可以及时 发现并解决问题,确保规划目标的顺利实现。
图层编辑与属性修改
02
MapInfo允许用户对图层进行编辑,包括添加、删除、修改要
素等,同时支持修改图层的属性信息。
图层符号化与样式设置
03
用户可以为图层设置不同的符号和样式,以区分不同的要素和
类别,使地图更加直观易懂。
属性数据编辑与查询
属性数据编辑
MapInfo提供强大的属性数据编辑功能,用户可以直接在属性表中修改数据,或者通过SQL 语句进行批量更新。
属性数据查询
支持多种查询方式,包括简单查询、高级查询和SQL查询等,用户可以根据需要快速定位到 所需数据。
查询结果展示与导出
查询结果可以直接在地图上高亮显示或者以列表形式展示,同时支持将查询结果导出为Excel、 CSV等格式。
03
地图可视化与表达
Chapter
符号设置与调整
基础符号设置
在MapInfo中,用户可以通过符 号管理器选择、修改和创建符号。 基础符号包括点、线、面等,每
快捷键使用
如Ctrl+N新建文件,Ctrl+O打开文件,Ctrl+S保 存文件,Ctrl+C复制对象,Ctrl+V粘贴对象等。同 时,MapInfo还支持自定义快捷键设置,提高操作 效率。
esupermapSample2---MapEdit例子二:地图编辑

Editor: 地图的编辑一、功能描述本工程主要演示地图几何对象的编辑,即添加、编辑、删除、移动几何对象,添加、删除、编辑节点等。
二、类及方法用到的类方法CSeWorkSpace Close、GetDataSourceAt、GetDataSourceCount、GetMaps、IsOpen、OpenCSeMapWnd AddLayer、Close、GetAction、GetLayer、GetLayerAt、GetLayerCount、InitialEditTextStyle、MoveBottom、MoveDown、MoveTop、MoveUp、OnDraw、OnInitialUpdate、OnLButtonDblClk、OnLButtonDown、OnLButtonUp、OpenMap、Refresh、RemoveLayerAt、SaveToMap、SetAction、SetEditableLayer、ViewEntireCSeDataSource GetAlias、GetDatasetCount、GetDataset、GetDatasetAtCSeDataset GetName、GetTypeCSeMaps AddMap、GetMapCount、GetMap、GetMapAt 、GetMapCount、GetMapNameAt、SetMapCSeLayer GetDatasetCSeLayerDef IsEditable、IsSelectable、IsSnapable、IsVisible、SetSelectable、SetSnapable、SetVisible三、说明及约定1、工程说明本工程为单文档类型的工程,提供菜单和工具条两种操作方式菜单中提供“文件、地图和编辑”三组菜单,其中:“文件”中提供“打开地图、添加图层、关闭和退出”四个菜单项;“地图”中除了放大、缩小、平移、点选、框选、整幅显示和刷新外,还提供“图层管理”功能;“编辑”中有“选择编辑层、添加点、添加线、添加面、添加文本、文本编辑、移动对象、删除对象、增加节点、编辑节点和删除节点”十一个菜单项。
UCMap for Windows 8 开发教程

UCMap for Windows 8 开发教程 UCMap for Windows 8 开发教程目录一、配置开发环境 (3)1.1 配置UCMap开发环境 (3)二、UCMap入门基础 (6)三、UCMap装载地图 (11)3.1 矢量地图 (11)四、UCMap基础功能 (13)4.1 地图浏览 (13)4.2 Info工具 (13)4.3 属性查询 (15)4.4 要素编辑 (15)4.6 测距测面积工具 (21)4.7 手绘工具 (21)4.8 空间分析工具(能实现常用的裁切,合并等) (22)五、空间查询与空间分析 (23)5.1 空间查询 (23)5.2 空间分析 (26)六、投影变换 (28)七、专题图 (29)7.1 UniqueValueRenderer类 (29)7.2 PictureUniqueValueRenderer类 (29)7.3 范围条件专题图 (30)八、UCMap地图配置过程 (31)UCMap for Windows 8 开发教程8.1 配置shp文件格式的地图 (31)8.2 新建图层 (39)8.3 UCMap地图配置程序处理影像图的一般步骤 (43)8.4 本地矢量地图显示效率优化 (46)九、UCMap 附加功能 (46)UCMap for Windows 8 开发教程 UCMap for Windows 8 开发教程一、配置开发环境1.1 配置UCMap开发环境UCMap for Windows 8需要您的操作系统是Windows 8,且使用Visual Studio 2012来开发。
所以在开始开发之前,您的计算机必须运行着Windows 8操作系统,并安装好Visual Studio 2012开发环境。
以上条件满足之后,从/kuibu/xiazai.asp下载UCMap for Windows 8开发包。
解压缩完毕,双击sqlite-winrt.vsix安装sqlite开发包,再双击UCMap-for-Windows-8.vsix安装UCMap开发包新建一个Windows应用商店工程demo4,工程模版中选择“空白应用程序(XAML)”,如下图在解决方案资源管理器中,右键单击“引用”,并选择“添加引用(R)...”,在接下来的对话框的左边选择“Windows”下的“扩展”,右边选择Microsoft Visual C++ Runtime Package、SQLite for Windows Runtime、UCMap for Windows 8这三项,如下图所示。
Oruxmaps 导航软件使用说明书
</SRS>
下面是WMS支持的坐标系统,必须选用:EPSG:4326.
否则Oruxmaps可能打不开WMS.
<LatLonBoundingBox SRS="EPSG:4326" minx="-18.1705"
miny="27.6374" maxx="4.3169" maxy="43.7722"/>
图像文件的格式可以用:image/png或者image/jpeg
下面可以获得可用的层.
<SRS>
EPSG:4326EPSG:32627 EPSG:32628 EPSG:32629 EPSG:32630 EPSG:32631
EPSG:4258 EPSG:25827 EPSG:25828 EPSG:25829 EPSG:25830 EPSG:25831
“如何记录航迹?”按下按钮“航迹”-->“开始记录”,系统处于航迹录制状态,屏幕下方显示更加详细的仪表盘信息,具体内容可以在“设置”选项里设定;当你移动时,屏幕上就会出现一条轨迹。
“想添加一个兴趣点吗?”按下按钮“航点”-->“创建”即或完成,点击这个航点会看到详细信息。
要完成航迹,只需要按下“航迹”-->“停止记录”,航迹会自动存储到内部数据库中。
<yop></yop><!-- operations with y allowed: 0, 1-->
<zop></zop><!-- operations with z allowed: 1-->
OruxMaps应用Garmin地图制作及美化方案byepic
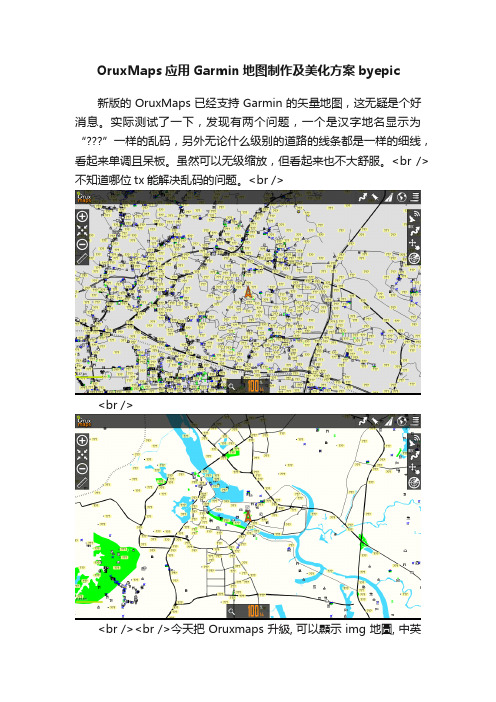
OruxMaps应用Garmin地图制作及美化方案byepic新版的OruxMaps已经支持Garmin的矢量地图,这无疑是个好消息。
实际测试了一下,发现有两个问题,一个是汉字地名显示为“”一样的乱码,另外无论什么级别的道路的线条都是一样的细线,看起来单调且呆板。
虽然可以无级缩放,但看起来也不大舒服。
<br /> 不知道哪位tx能解决乱码的问题。
<br /><br /><br /><br />今天把 Oruxmaps 升級, 可以顯示 img 地圖, 中英文地圖的情況與上面的圖片相同.嘗試用Mapedit 自己動手把騎車的軌跡轉變成道路, 加上英文和數字的 label, 單字折, 它顯示了...部份 poi 如建築物, 是不顯示 label 的.估計不是亂碼, 以是不支持雙字節 (double bit) 漢字.应该是编码问题我记得garmin地图里面的汉字是GB码, android必须用unicode, 大概需要先把img解成MP,然后再转码,再压回img,类似纠偏的流程,谁熟练的可以搞一下. Garmin img 格式是用 codepage 来储存不同语言的文字.Oruxmaps 5.0 用 jgarminimg library 打开 img 文件.jgarminimg 不支持双字节 codepage 或 UTF8.Oruxmaps 支持 Mapsforge 的矢量地图.Mapsforge 是基于OpenStreetMap (OSM) 的一个rendering library./p/mapsforge/大家可以试试下面的 HongKong Macau .map+.xml.用 Oruxmaps 5.0 打开.Oruxmaps 5.0, 徐了十分不好看的红色主调及新icon外, 有很多新功能:- Garmin img 支持: 虽然不能显示地标, 但打开GM+cgpsmapper生成的等高线图效果不错.- 三维地图: 将SRTM的hgt放在oruxmaps/dem内,按3D icon 就可以.利用ASTER+GM输出30m间距的hgt + 14层卫星地图效果比GE更好.- KML图层 (overlay): 不同于kml轨迹输入, 你可以选择显示kml 内不同部分.e.g. 一般kml轨迹会有轨迹(trackl)+地标(poi, waypoint), 输入轨迹时两者都会显示.但作为KML图层, 你可以选显示 track/poi/track+poi.- Lateral daskboard (settings->UI -> Misc UI): 在横放手机时会同时显示地图及雷达/轨迹/Trip computer (用于骑行或自驾). 信息量大!怪不得人工修改img的中文内码为UTF8等后也无效。
SURPERMAP过程步骤(最终版)

SURPERMAP过程步骤(最终版)⼀、基期转换模型:其他盘。
↓↓主要为了存放外部导⼊的数据,建库模式是:↓↓包括要不放在规划库中的⾃定义要素中)。
↓↓所有数据库⾥数据都在这⾥⽣产,⼀个⼯作空间只能创建⼀个规划库其他规划库只能以临时库的形式存在。
“.”号代表本机,也可输⼊本机名或者其他服务器名称;取重复名称;SQL数据库的访问名称和密码↓↓设定投影→下⼀步→地理坐标XI-AN1980CHINA→下⼀步→带号:⽤户⾃定义→中央经线(设置⾃⼰的中央经线)→⽔平偏移XX500000,XX为带号,如38500000)↓↓↓↓↓↓1、⾏政区融合可能会导致⾏政区名称消失;2、将表格数据导⼊SHP右键点击转换线→属性权属单位代码//⽬标字段:XZQHDM)↓↓↓↓↓↓选择⽣成接图表的数据源(GHK)和数据集(CJXZQ),1:1万。
↓↓↓↓注:基期地类图斑⾯积TBDLMJ应⼤于0。
↓↓容限0.001注:基期地类图斑地类⾯积必须⼤于零。
↓↓↓↓②图斑地类⾯积必须⼤于0;②任何区(保护区、⾯积、农⽤地⾯积、基本农⽥⾯积、管制区⾯积等)的⾯积必须⼤于0;且上图⾯积必须⼤于400平⽅⽶;②做任何区时,都要检查(在数据处理中)⾃相交的情况;(如果⾃相交,可能由于节点太靠近了,选中区,然后选择“增加节点”,看整个区的⾛向,然后看错的位置是不是有节点相近,如果有,则移开,或者直接删除节点,选中节点,按DELETE,注:改完后编著“已修改”)②检查属性时,必要的属性⼀定不能为空。
例如:⼟地规划地类中⾏政区代码、⼆、基期数据转为规划地类:↓↓↓↓当DLTB转为GHTBGHXW、GHLX同理,注意地类名称也要对应转换。
↓↓↓↓注意205风景名胜及特殊⽤地与规划分类中的231风景名胜设施⽤地、232特殊⽤地之间关系。
↓↓检查内容:必要数据集缺失、必要字段为空值等。
步↓↓如果不⼀致,可以通过下⾯操作:①基期现状要素下,基期地类代码是否有值;②在⼯具箱下线物扣除校验、计算过程中注意耕地扣除地类代码为155。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
UCMap地图配置过程
UCMap地图配置程序(下载地址:/kuibu/xiazai.asp UCMap sdk for Android开发包)的功能是:将shp文件格式的地图配置成UCMap特定的地图格式(主要生成2个文件:map.dat和map.ini),以便于使用UCMap平台来开发地图应用。
本文参考“UCMap开发手册.pdf”,以配置北京地图为例,说明基于UCMap配置开发地图应用的过程。
步骤如下:
1、导入shp图层,生成初始地图
打开“UCMap地图配置程序.exe”,点击导入图层,如下图所示:
坐标范围:是地图的最大范围,可以不设置,程序会根据图层来自动设置;
存放路径:新产生地图的存放位置,必须设置。
地图生成后,该路径下会生成map.dat 和map.ini文件。
存放路径设置后,程序会弹出选择shp文件窗口,打开地图的shp文件所在路径,选择需要的shp文件:
这里选择所有的shp文件,程序将导入这些文件,生成初步的地图以及map.dat文件,
可以看出,此时的地图是看不清的,下面开始对地图进行配置。
2、对图层排序
1)按面、线、点自上而下排序;
2)越底层的面图层要放在其它图层之上,以免遮住;
3)线、点图层之间没有顺序要求。
选择左侧的图层,直接拖动到相应的位置即可,配置后的图层如下:
3、对每个图层设置缩放比例、样式
初始地图中,每个图层的缩放比例都是一样的,都会同时显示,显然这样不便于浏览,需要设置每个图层的显示比例,让它们在合适的时候以适当的样式出现。
设置方法:
将地图缩小到上图所示的大小,记录下此时右下角的显示比例3.683441e-03,然后点放大,每次点击时,随着地图的不断放大,依次记录下一组显示比例:
3.683441e-03,1.841721e-03,9.208603e-04,
4.604302e-04,2.302151e-04,1.151075e-04,
5.755377e-05,2.877689e-05,1.438844e-05,7.194221e-06
可以看出,越放大,显示比例值越小。
(注意:可能每次重新放大时,相应的比例不太一样,没关系,按顺序记录一组数据即可。
)
地图最小时,只需要显示几个图层,随着地图的不断放大,显示的图层不断增加,因此,需要设置每个图层在哪次放大时显示,将“最大显示比例”设置成以上对应的显示比例值即可,“最小显示比例”一般可以采用默认的,如果你需要放大到某些级别时让图层不显示,可以设置。
“自动标注字段”:若需要标注,可以选择标注字段,空白则不显示标注;
“样式”:设置图元的颜色样式等。
颜色可以从已有的选择,或设置hsb或RGB值。
可以自定义图标,采用的图片文件放到lib文件夹。
以下时对几个典型类型图层的设置情况:
1)省界_regioin:省界在任何时候都显示,显示比例默认不变。
市界、县界也如此。
2)湖沼_region与绿地_region:
3)国道、省道:
4)国道高速路、铁路:
5)政府机构和乡镇:
4、生成地图
在全部图层的显示比例和样式设置完成后,点击“生成地图”,存放路径下会生成map.ini 文件。
将map.dat、map.ini和lib文件夹放在单独的文件夹bjmap下面。
5、地图存入sd卡
将bjmap文件夹拷贝到sd卡下面。
6、修改demo4代码,模拟器中显示。
1)修改MyMapView类的onSizeChanged方法,将载入的地图路径改为“/sdcard/bjmap/map.ini”,如下:
2)由于模拟器上不能用手指缩放地图,增加“放大”、“缩小”2个菜单,以便于测试。
修改MainAct类的代码:
A.增加放大、缩小菜单按钮:
这里仅用于测试,复用前面的menu_map图标。
B.添加菜单对应的相应事件,修改onItemClick方法:
这样运行demo4后,菜单上多出2个按钮:
7、测试过程:
初始显示:
第1次放大:
第2次放大:
跬步科技 第6次放大:。