无线鼠标键盘DIY电路图
用于无线鼠标的无接触供电电路
目前广泛使用的无线鼠标采用电池供电。
更换电池给用户带来不便。
在此给出一种适用于无线鼠标的无接触供电(Contact-less Power Transfer,CPT)电路,它包括无接触供电初级电路和次级电路2部分。
供电装置采用USB供电,电压为5 V,通过自激振荡电路产生138 kHz左右的高频振荡电压,经鼠标垫内置的无接触耦合初级载流线圈L31输出。
无线鼠标内置次级载流线圈L32,它采用无接触感应耦合方式获取电能,再由MC34063集成稳压芯片构成BUCK稳压电路,负载电压为3.1V。
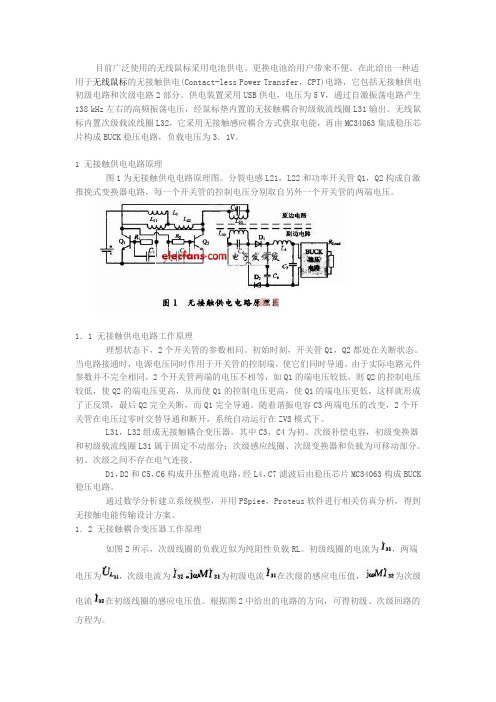
1 无接触供电电路原理图1为无接触供电电路原理图。
分裂电感L21,L22和功率开关管Q1,Q2构成自激推挽式变换器电路,每一个开关管的控制电压分别取自另外一个开关管的两端电压。
1.1 无接触供电电路工作原理理想状态下,2个开关管的参数相同。
初始时刻,开关管Q1,Q2都处在关断状态。
当电路接通时,电源电压同时作用于开关管的控制端,使它们同时导通。
由于实际电路元件参数并不完全相同,2个开关管两端的电压不相等,如Q1的端电压较低,则Q2的控制电压较低,使Q2的端电压更高,从而使Q1的控制电压更高,使Q1的端电压更低,这样就形成了正反馈,最后Q2完全关断,而Q1完全导通。
随着谐振电容C3两端电压的改变,2个开关管在电压过零时交替导通和断开,系统自动运行在ZVS模式下。
L31,L32组成无接触耦合变压器,其中C3,C4为初、次级补偿电容,初级变换器和初级载流线圈L31属于固定不动部分;次级感应线圈、次级变换器和负载为可移动部分。
初、次级之间不存在电气连接。
D1,D2和C5,C6构成升压整流电路,经L4,C7滤波后由稳压芯片MC34063构成BUCK 稳压电路。
通过数学分析建立系统模型,并用PSpiee,Proteus软件进行相关仿真分析,得到无接触电能传输设计方案。
1.2 无接触耦合变压器工作原理如图2所示,次级线圈的负载近似为纯阻性负载RL。
2.4G无线鼠标及RF接收器原理图

---------------------------------------------------------------最新资料推荐------------------------------------------------------2.4G无线鼠标及RF接收器原理图12345678R2 VCC 150K VCCRESTSPI_MISO OSCO C5 OSCI N/A Y1 4MHz RA 1M C2 27P C3 27P主控电路RF电路VCC R5 VCC 150K RF_CS#R6RF_RSTC6 VCC 104R7 4.7~10RTVCCC7 10uF A150KAR1 20KANT U1 P55 P54 TCC GND SPI_MISO SPI_CLK SPI_MOSI RF_CS# LVD# PD#/ID DPI_BTN MBUTTON RBUTTON 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 P55 P54 TCC VDD NC VSS INT P50 P51 P52 P53 P60 P61 P62 P63 P64 P56 P57 RESET OSCI OSCO P77 P76 P75 P74 P73 P72 P71 P70 P67 P66 P65 32 31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 P56 P57 REST OSCI OSCO PKT_FLAG IIC_SDA P75 P74 IIC_SCL SNS_CS# ZWH_C ZWH_A ZWH_B LBUTTON VCC C1 104 C4 104L2 * CF1 *ANT 2. 4GCF2 *VCC+1.8V C16 30PF VCC Y3 12M C15 30PF +1.8V C14 0. 1uF C8 2.2UF ANT R9 680K U3 R8 560R24 23 22 21 20 19C10 0.1uF TVCC C9 0.1uF BSE28A DICE B 1 2 3 4 U2 A0 A1 A2 VSS VCC WP SCL SDA 8 7 6 5 R4 10KXTALO VDD_IN GND CKPHA LDO_VOUT VDD_IOIIC_SCL IIC_SDA24C02(SOP-8)IF_VDD AMS_VDD FIFO_FLAG RXCLK PKT_FLAG GND1 2 3 4 5 6XTALI PLL_VDD VCO_VDD ANT GND RF_VDDSPI_MISO RESET_n SPI_CLK SPI_MOSI SPI_SS DIG_VDD18 17 16 15 14 13SPI_MISO RF_RST SPI_CLK SPI_MOSI RF_CS# +1.8V C11 10nF按键、编码电路S4 DPI_BTN S7 PD#/ID S1 LBUTTON S3 MBUTTON C RBUT TON S2 RIGHT MIDDLE LFETCOM B A7 8 9 10 11 12DPI +1.8V PD/ID1/ 4C13 0.1uF SE1 EC10E8713 DICEC12 10NFPKT_FLAG3 2 1ZWH_C ZWH_B ZWH_ACR3 VCCRST5030#POWER电路B+ BT1 1. 5V X1 C17 104 C18 47uF L1 100uH 3 LXD3 SS12 U4GND低电压检测电路VCC D1 VCC C19 * C20 104 C21 100uF B+ 3 R10 *(150R)GNDSensor电路D2 LED120K R11 VCC *(100R)*R3在16083和A5030上使用, A5090不用R3. *R11在16083和A5030上用100R *R11在A5090上用180RVout2Batt_Low IIC_SCL 1 LVD#U6 SPI_MISO RST5030# SNS_CS# VCC R12 150K ADNS5030 ,16083,A5090 Vout 1 2 3 4 MISO XY_LED NRESET NCS MOSI VDD3 GND SCLK 8 7 6 5 SPI_MOSI VCC GND SPI_CLK VCC + C23 10uF C22 1041BL8530-XX(SOT-89)VinU5 BL8506-XX(SOT-23)D2备注:带*的元器件为选用或根据具体情况选定Title Size A4 Date: File: 1 2 3 4 5 6 Number Revision Sheet of Drawn By: 7DGiGa HiD-V2-SE-5030/16083/509020100309 WYJ8V2.3---------------------------------------------------------------最新资料推荐------------------------------------------------------ 1234AARF电路+1.8V 3V3 C9 0.1uF R3 3.3R RF3V3 C8 0.1uF C7 4.7uF/6.3V主控电路3V3 C2 4.7uF/6.3VD+ 3V3 GND OSCO OSCI+5V C5 4.7uF/10V C1 104OSCOC4 Y1 12M30P(15P)OSCI C3 24P(12P)DSPI_MISO RF_RST#24 23 22 21 20 19OSCI B +1.8V 2.2nF C11 2.2UF ANT L2 ANT1 * CF1 *RFIXP54 P55 P56 P57 P60C141 2 3 4 5D+ V3.3 VSS OSCO OSCI20 19 18 17 16DP92 P93 P52 P53VDD P66 P65 P62 P6115 14 13 12 11+5V LED# E2_WP ID_KEY IIC_SDA BXTALO VDD_IN GND CKPHA LDO_VOUT VDD_IOIF_VDD AMS_VDD FIFO_FLAG RXCLK PKT_FLAG GND1 2 3 4 5 6XTALI PLL_VDD VCO_VDD ANT GND RF_VDDSPI_MISO RESET_n SPI_CLK SPI_MOSI SPI_SS DIG_VDD18 17 16 15 14 13SPI_MISO RF_RST# SPI_CLK SPI_MOSI RF_CS# +1.8V C10 10nF C13 0.1uF R2 3V3 10KSPI_CLK 6 SPI_MOSI 7 8 RF_CS# PKT_FLAG 9 IIC_SCL 10U2 SE95CQ(QFN-20)或SE95CD(DICE)以上是SE95BQ/SE95BD 的升级版1 2 3 SCL GND SDA WP VCC 5 4 E2_WP 3V3 C6 104IIC_SCL GND IIC_SDA+1.8V PKT_FLAG C C12 0.1uF 3V3 R1根据 D1的LED特性确定 R1 0-560R D1 LED LED# +5V DD+ R11 3.3R R9 R10 USBA 33R 33R 1 2 3 4 VCC DD+ GND57 8 9 10 11 12U1 R8713(QFN-24)或8713(DICE)U3 SE24C02TB(TSOT-23-5)CID_KEYL1 SID ID KEY选用电路Bead 需过安规时,R9,R10 ,R11 ,L1用上述值否则直接短路DTitle Size A4 Date: File: 1 2 3GiGa HiD 2.4G Nano RX接收器原理图NumberDGiGa HiD-V2-SE-Nano RXSheet of Drawn By: WYJ3/ 44RevisionV2.320100131。
无线鼠标系统电路设计方案大全(三款电路设计原理详细)
无线鼠标系统电路设计方案大全(三款电路设计原理
详细)
无线鼠标系统电路设计方案(一)
设计的无线鼠标,以CC2430为控制芯片构成发射电路和接收电路。
发射电路负责采集与发送鼠标按键的移动信息,接收电路负责信息接收、处理并与计算机通信。
1、发射部分的电路设计
发射部分的硬件电路由鼠标移动光学传感器ADNS5030、鼠标按键、无线发射模块CC2430(软件设置为发送模式)构成。
由光学传感器ADNS5030检测鼠标的移动信息,将采集到的信息经过SPI 串行接口传递给CC2430处理并发送出去。
发射部分的电路图见图
2。
ADNS-5030光学传感器,功耗低且尺寸小,能高速检测鼠标运动。
它包含图像采集系统(IAS)、数字信号处理器(DSP)和串行总线端口。
IAS将采集的图像通过数字信号处理,计算鼠标在dx和dy方向的相对位移值,决定移动的方向及距离。
无线鼠标键盘接收器的设计
2.4GHz无线鼠标键盘接收器的设计最高的质量最低的成本——节省70%PCB返修成本查看最近90天中添加的最新产品最新电子元器件资料免费下载派睿电子TI有奖问答 - 送3D汽车鼠标IR 推出采用焊前金属的汽车级绝缘栅双极晶体管全球电子连接器生产商—samtec 最新断路器保护套摘要:针对RF 无线鼠标传输速度慢、传输距离有限的缺点,提出了一种2.4 GHz 无线鼠标键盘接收器的设计方案。
采用USB 多媒体键盘编码器HT82K95E 和射频收发器nRF24L01 进行设计,以HT82K95E 为核心,完成HID 设备的枚举过程。
控制器利用普通I/O 口模拟SPI 总线,完成了与无线收发模块的数据交换。
采用nRF24L01 无线通信协议中的Enhanced ShockBurst 收发模式,数据低速输入,但高速发射,从而实现了鼠标键盘复合设备与主机间的无线通信功能。
试验结果表明,由于采用了2.4 GHz 无线技术,该无线鼠标键盘接收器能够有效传输距离可达10 m,大大降低功耗,增强了抗干扰性能。
随着无线通信技术的不断发展,近距离无线通信领域出现了蓝牙、RFID、WIFI 等技术。
这些技术不断应用在嵌入式设备及PC 外设中。
2.4 GHz 无线鼠标键盘使用2.4~2.483 5 GHz无线频段,该频段在全球大多数国家属于免授权使用,这为无线产品的普及扫清了最大障碍。
用户可迅速地进入与世界同步的无线设计领域,最大限度地缩短 设计和生产时间,并且具有完美性能,能够替代蓝牙技术。
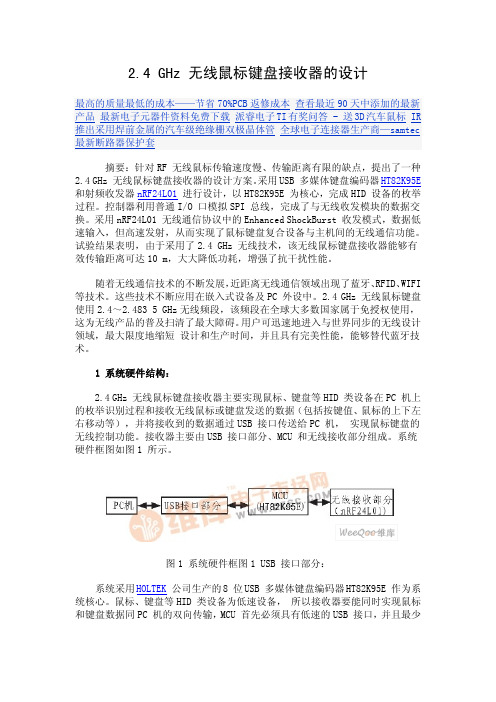
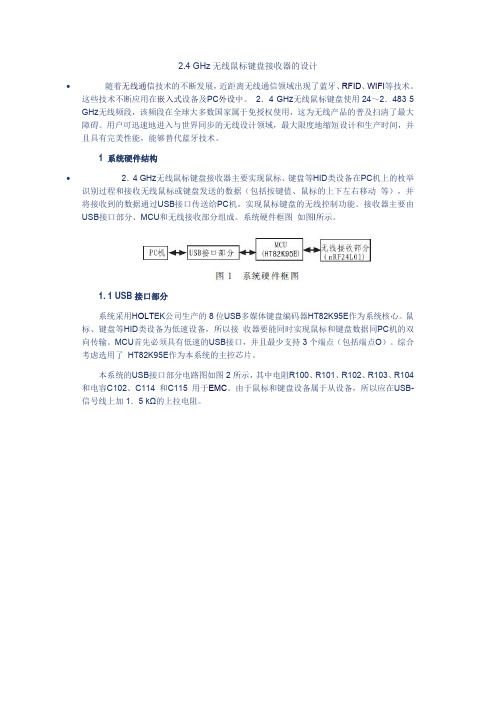
1 系统硬件结构:2.4 GHz 无线鼠标键盘接收器主要实现鼠标、键盘等HID 类设备在PC 机上的枚举识别过程和接收无线鼠标或键盘发送的数据(包括按键值、鼠标的上下左右移动等),并将接收到的数据通过USB 接口传送给PC 机, 实现鼠标键盘的无线控制功能。
接收器主要由USB 接口部分、MCU 和无线接收部分组成。
系统硬件框图如图1 所示。
光电鼠标原理 电路图

光电鼠标原理电路图光电鼠标是一种基于光电传感器原理工作的鼠标设备。
它使用红外光或者激光来感知鼠标在平面上的运动。
以下是光电鼠标的工作原理和电路图。
工作原理:1. 光电传感器:光电鼠标使用光电传感器来感知鼠标在平面上的运动。
光电传感器包含一个发光二极管(LED)和一个光电二极管。
LED发出红外光或激光束,射向平面表面。
当光束射到平面上的纹理或边缘时,会因反射或散射而发生改变。
2. 光电二极管:光电二极管在光束射到平面上的特定位置时,可以感知到光的变化。
光电二极管会将感知到的光信号转化为电信号。
3. 运动检测:光电鼠标会通过感知光电传感器的输出信号来检测鼠标在平面上的运动。
当鼠标移动时,感知到的光信号会发生变化,进而能够计算出鼠标的运动方向和速度。
4. 数据传输:光电鼠标将检测到的运动信息通过连接线传输到计算机。
计算机根据传输的信息来控制光标在屏幕上的移动。
电路图:(以下是一种基本的光电鼠标电路图示意图,实际电路可能会有所不同)+5V│┌─┼───┐LED1───┤ ├──────┬─→ GND│ │┌─┼───┐Key1───┤ ├──────┤│ │C1────────┘ └──────┤OPAMP1│ │R1│┼─────── OUT注:图中的元件:- LED1: 发光二极管- Key1: 光电二极管- C1: 用于滤波的电容- OPAMP1: 运算放大器- R1: 电阻- OUT: 输出信号总结:光电鼠标利用光电传感器来感知鼠标在平面上的运动,在电路图中使用了发光二极管、光电二极管以及其他相关元件。
这些元件配合在一起,实现了鼠标运动的检测和数据传输。
2.4G 无线鼠标原理图
ADNB-7051-EV and ADNB-7052-EV Low Power Laser Mouse Bundles Data SheetDescriptionThe Avago Technologies ADNB-7051-EV and ADNB-7052-EV low power laser mouse bundles are the laser-illuminated system enabled for cordless application. Powered by Avago Technologies LaserStream™ technology, the mouse can operate on many surfaces that proved difficult for traditional LED-based optical navigation. Its low power architecture is capable of sens-ing mouse motion while prolonging battery life, two performance areas essential in demanding cordless applications.ADNB-7051-EV and ADNB-7052-EV Low Power Laser Mouse Bundles include: Bundle PartNumber Part Number DescriptionADNB-7051-EV ADNS-7050Low Power Laser Mouse SensorADNV-6340Single-Mode Vertical-Cavity SurfaceEmitting Laser (VCSEL)ADNS-6120Laser Mouse Round LensADNS-6230-001Laser Mouse VCSEL Assembly Clip Bundle PartNumber Part Number DescriptionADNB-7052-EV ADNS-7050Low Power Laser Mouse SensorADNV-6340Single-Mode Vertical-Cavity SurfaceEmitting Laser (VCSEL)ADNS-6130-001Laser Mouse Trim LensADNS-6230-001Laser Mouse VCSEL Assembly Clip The ADNS-7050 sensor along with the ADNS-6120 or ADNS-6130-001 lens, ADNS-6230-001 clip and ADNV-6340 VCSEL form a complete and compact laser mouse tracking system. There is no moving part, which means high reliability and less maintenance for the end user. In addition, precision opti-cal alignment is not required, facilitating high volume assembly.This document will begin with some general information and usage guide-lines on the bundle set, followed by individual detailed information on ADNS-7050 laser mouse sensor, ADNV-6340 VCSEL, ADNS-6120 or ADNS-6130-001 lens and ADNS-6230-001 clip.Overview of Laser Mouse Sensor AssemblyFigure 1. 2D Assembly drawing of ADNB-7052-EV (top and cross-sectional view). 232D Assembly Drawing of ADNB-7051/52-EV, PCBs and Base PlateFigure 2. Exploded view drawing.Shown with ADNS-6130-001 Laser Mouse Lens, ADNS-6230-001 VCSEL As-sembly Clip and ADNV-6340 VCSEL. The components interlock as they are mounted onto defined features on the base plate.The ADNS-7050 laser mouse sensor is designed for mounting on a through hole PCB, looking down. There is an aperture stop and features on the package that align to the lens.The ADNV-6340 VCSEL is recommended for illumination, provides a laser diode with a single longitudinal and a single transverse mode. It is particu-larly suited as lower power consumption and highly coherent replacement of LEDs. It also provides wider operation range while still remaining within single-mode, reliable operating conditions.The ADNS-6120 or ADNS-6130-001 Laser Mouse Lens is designed for use with ADNS-7050 sensor and the illumination subsystem provided by theassembly clip and the VCSEL. Together with the VCSEL, the lens provides the directed illumination and optical imaging necessary for proper operation of the Laser Mouse Sensor. ADNS-6120 and ADNS-6130-001 are precision molded optical components and should be handled with care to avoid scratching of the optical surfaces. ADNS-6120 also has a large round flange to provide a long creepage path for any ESD events that occur at the open-ing of the base plate.The ADNS-6230-001 VCSEL Assembly Clip is designed to provide mechanical coupling of the ADNV-6340 VCSEL to the ADNS-6120 or ADNS-6130-001lens. This coupling is essential to achieve the proper illumination alignment required for the sensor to operate on a wide variety of surfaces.Avago Technologies provides an IGES file drawing describing the base platemolding features for lens and PCB alignment.ADNV-6340 (VCSEL)CUSTOMER SUPPLIED VCSEL PCB* or ADNS-6120 FOR ROUND LENSCUSTOMER SUPPLIED BASE PLATE WITH RECOMMENDED FEATURES PER IGES DRAWING4Figure 3. Recommended PCB mechanical cutouts and spacing.9.Tune the laser output power from the VCSEL to meet the Eye Safe Class I Standard as detailed in the LASER Power Adjustment Procedure.10.Install the mouse top case. There must be a feature in the top case (or other area) to press down onto the sensor to ensure the sensor and lens are interlocked to the correct vertical height.Assembly Recommendation1.Insert the sensor and all other electrical components into the applica-tion PCB (main PCB board and VCSEL PCB board).2.Wave-solder the entire assembly in a no-wash solder process utilizing a solder fixture. The solder fixture is needed to protect the sensor during the solder process. It also sets the correct sensor-to -PCB distance, as the lead shoulders do not normally rest on the PCB surface. The fixture should be designed to expose the sensor leads to solder while shielding the optical aperture from direct solder contact.3.Place the lens onto the base plate.4.Remove the protective kapton tape from the optical aperture of the sensor. Care must be taken to keep contaminants from entering the aperture.5.Insert the PCB assembly over the lens onto the base plate. The sensor aperture ring should self-align to the lens. The optical position refer-ence for the PCB is set by the base plate and lens. Note that the PCB motion due to button presses must be minimized to maintain optical alignment.6.Remove the protective cap from the VCSEL.7.Insert the VCSEL assembly into the lens.8.Slide the clip in place until it latches. This locks the VCSEL and lens together.Design Considerations for Improving ESD PerformanceFor improved electrostatic discharge performance, typical creepage and clearance distance are shown in the table below. Assumption: base plate construction as per the Avago Technologies supplied IGES file and ADNS-6130-001 trim lens (or ADNS-6120 round lens).Typical Distance Millimeters Creepage 12.0Clearance2.1Note that the lens material is polycarbonate and therefore, cyanoacrylate based adhesives or other adhesives that may damage the lens should NOT be used.DIMENSIONS IN MILLIMETERS (INCHES).5Figure 4. Sectional view of PCB assembly highlighting optical mouse components.Figure 5a. Schematic diagram for 3-button scroll wheel corded mouse.EEPROM for Laser Eye Safety for Sun+ ALPC6NotesThe supply and ground paths should be laid out using a star methodology.Level shifting is required to interface a 5V micro-controller to the ADNS-7050. If a 3V micro-controller is used, the 74VHC125 component shown may be omitted.LASER Drive ModeThe laser is driven in pulsed mode during normal operation. A calibration mode is provided which drives the laser in continuous (CW) operation. Eye SafetyThe ADNS-7050 and the associated components in the schematic of Figure 5 are intended to comply with Class 1 Eye Safety Requirements of IEC 60825-1. Avago Technologies suggests that manufacturers perform testing to verify eye safety on each mouse. It is also recommended to review possible single fault mechanisms beyond those described below in the section “Single Fault Detection”. Under normal conditions, the ADNS-7050 generates the drive current for the laser diode (ADNV-6340).In order to stay below the Class 1 power requirements, LASER_CTRL0 (register 0x1a), LASER_CTRL1 (register 0x1f), LSRPWR_CFG0 (register 0x1c) and LSRPWR_CFG1 (register 0x1d) must be programmed to appropriate values. The system comprised of the ADNS-7050 and ADNV-6340, is designed to maintain the output beam power within Class 1 requirements over components manufacturing tolerances and the recommended temperature range when adjusted per the procedure below and imple-mented as shown in the recommended application circuit of Figure 5. For more information, please refer to Eye Safety Application Note AN 5230. LASER Power Adjustment Procedure1.The ambient temperature should be 25°C ±5°C.2.Set VDD to its permanent value.3.Set the Range bit (bit 7 of register 0x1a) to 0.4.Set the Range_C complement bit (bit 7 of register 0x1f) to 1.5.Set the Match_bit (bit 5 of register 0x1a) to the correct value for the bindesignation of the laser being used.6.Set the Match_C_bit (bit 5 of register 0x1f) to the complement of theMatch_bit.7.Enable the Calibration mode by writing to bits [3,2,1] of register 0x1A sothe laser will be driven with 100% duty cycle.8.Write the Calibration mode complement bits to register 0x1f.9.Set the laser current to the minimum value by writing 0x00 to register0x1c, and the complementary value 0xFF to register 0x1d.10.Program registers 0x1c and 0x1d with increasing values to achieve anoutput power as close to 506uW as possible without exceeding it. If this power is obtained, the calibration is complete, skip to step 14.11.If it was not possible to achieve the power target, set the laser current tothe minimum value by writing 0x00 to register 0x1c, and the comple-mentary value 0xff to register 0x1d.12.Set the Range and Range_C bits in registers 0x1a and 0x1f, respectively,to choose to the higher laser current range.13.Program registers 0x1c and 0x1d with increasing values to achieve anoutput power as close to 506uW as possible without exceeding it. 14.Save the value of registers 0x1a, 0x1c, 0x1d, and 0x1f in non-volatilememory in the mouse. These registers must be restored to these values every time the ADNS-7050 is reset.15.Reset the mouse, reload the register values from non-volatile memory,enable Calibration mode, and measure the laser power to verify that the calibration is correct.Good engineering practices such as regular power meter calibration, random quality assurance retest of calibrated mice, etc. should be used to guarantee performance, reliability and safety for the product design.LASER Output PowerThe laser beam output power as measured at the navigation surface plane is specified below. The following conditions apply:1.The system is adjusted according to the above procedure.2.The system is operated within the recommended operating temperaturerange.3.The VDD value is no greater than 300mV above its value at the time ofadjustment.4.No allowance for optical power meter accuracy is assumed.Parameter Symbol Minimum Maximum Units NotesLaser out-LOP716µW Class 1 limit with put power recommendedVCSEL and lens. Disabling the LASERLASER_NEN is connected to the gate of a P-channel MOSFET transistor which when ON connects VDD to the LASER. In normal operation, LASER_NEN is low. In the case of a fault condition (ground or VDD3 at XY_LASER), LASER_NEN goes high to turn the transistor off and disconnect VDD3 from the LASER.Single Fault DetectionADNS-7050 is able to detect a short circuit or fault condition at the XY_LASER pin, which could lead to excessive laser power output. A path to ground on this pin will trigger the fault detection circuit, which will turn off the laser drive current source and set the LASER_NEN output high. When used in combination with external components as shown in the block diagram below, the system will prevent excess laser power for a resistive path to ground at XY_LASER by shutting off the laser. In addition to the ground path fault detection described above, the fault detection circuit is continuously checked for proper operation by internally generating a path to ground with the laser turned off via LASER_NEN. If the XY_LASER pin is shorted to VDD3, this test will fail and will be reported a a fault.7Figure 6. Single fault detection and eye safety feature block diagram.V8ADNS-7050 Laser Mouse Sensor Data SheetTheory of OperationThe ADNS-7050 is based on LaserStream™ Technology, which measures changes in position by optically acquiring sequential surface images (frames) and mathematically determining the direction and magnitude of movement. The ADNS-7050 contains an Image Acquisition System (IAS), a Digital Signal Processor (DSP), and a four wire serial port. The IAS acquires microscopic surface images via the lens and illumination system. These images are pro-cessed by the DSP to determine the direction and distance of motion. The DSP calculates the ∆x and ∆y relative displacement values. An external microcontroller reads the ∆x and ∆y information from the sensor serial port. The microcontroller then translates the data into PS2, USB, or RF signals before sending them to the host PC or game console.Features•Low power architecture•New LaserStream™ technology•Self-adjusting power-saving modes for longest battery life •Speed motion detection up to 20 ips and 8G•Enhanced SmartSpeed self-adjusting frame rate for optimum performance •Motion detect pin output•Internal oscillator – no clock input needed•Selectable 400 and 800 cpi resolution•Wide operating voltage: 2.7 V-3.6 V nominal•Four wire serial port•Minimal number of passive components•Laser fault detect circuitry on-chip for Eye Safety Compliance Applications•Laser mice•Optical trackballs•Integrated input devices•Battery-powered input devicesPinout of ADNS-7050 Optical Mouse SensorPin Name Description1NCS Chip Select (Active Low Input)2MISO Serial Data Output (Master In/Slave Out) 3SCLK Serial Clock Input4MOSI Serial Data Input (Master Out/Slave In) 5MOTION Motion Detect (Active Low Output)6LASER_NEN LASER Enable (Active LOW)7GND Ground8XY_LASER LASER Control9AGND Analog Ground10AVDD Analog Supply Voltage 11AGND Analog Ground12GND Ground13GND Ground14NC No Connection15GND Ground16VDD Supply Voltage17NC No Connection18NC No ConnectionA7050XYYWWZ1 NCS2 MISO3 SCLK4 MOSI5 MOTION6 LASER_NEN7 GND8 XY_LASER9 AGND18 NC17 NC16 VDD15 GND14 NC13 GND12 GND11 AGND10 AVDDFigure 7. Package outline drawing (top view).910Figure 8. Package outline drawing.CAUTION: It is advised that normal static precautions be taken in handling and assembly of this component to prevent damage and/or degradation which may be induced by ESD.NOTES:1. DIMENSIONS IN MILLIMETERS (INCHES).2. DIMENSIONAL TOLERANCE: ± 0.1 mm.3. COPLANARITY OF LEADS: 0.1 mm.4. LEAD PITCH TOLERANCE: ± 0.15 mm.5. CUMULATIVE PITCH TOLERANCE: ± 0.15 mm.6. ANGULAR TOLERANCE: ± 3.0 DEGREES.7. MAXIMUM FLASH: + 0.2 mm.8.CHAMFER (25° X 2) ON THE TAPER SIDE OF THE LEAD.9. * THESE DIMENSIONS ARE FOR REFERENCES ONLY AND SHOULD NOT BE USED TO MECHANICALLY REFERENCE THE SENSOR.PIN 1Figure 9. Block diagram of ADNS-7050 optical mouse sensor.Regulatory Requirements•Passes FCC B and worldwide analogous emission limits when assembled into a mouse with shielded cable and following Avago Technologies recommendations.•Passes IEC-1000-4-3 radiated susceptibility level when assembled into a mouse with shielded cable and following Avago Technologies recom-mendations.•Passes EN61000-4-4/IEC801-4 EFT tests when assembled into a mouse with shielded cable and following Avago Technologies recommendations.•UL flammability level UL94 V-0.•Provides sufficient ESD creepage/clearance distance to avoid discharge up to 15 kV when assembled into a mouse according to usage instruc-tions above.P O W E R A N D C O N T R O LS E R I A L P O R T A N D R E G I S T E R SIMAGE ARRAYDSP OSCILLATORLASER DRIVE GNDAGNDXY_LASER AVDDVDDNCS ADNS-7050SCLK MOSI MISO MOTIONLASER_NENAbsolute Maximum RatingsParameter Symbol Minimum Maximum Units NotesStorage Temperature T S-4085ºCLead Solder Temp260ºC For 10 seconds, 1.6 mm below seating plane. Supply Voltage V DD-0.5 3.7VESD2kV All pins, human body model MIL 883 Method 3015 Input Voltage V IN-0.5V DD + 0.5V All PinsLatchup Current Iout20mA All PinsRecommended Operating ConditionsParameter Symbol Minimum Typical Maximum Units NotesOperating Temperature T A040ºCPower Supply Voltage V DD 2.7 2.8 3.6V Including noisePower Supply Rise Time V RT1µs0 to 2.8 V100msSupply Noise (Sinusoidal)V NA100mVp-p10 kHz - 50 MHzSerial Port Clock Frequency f SCLK1MHz Active drive, 50% duty cycle Distance from Lens Reference Z 2.18 2.40 2.62mm Results in ±0.2 mm minimum DOF. Plane to Surface See Figure 10.Speed S20in/secFigure 10. Distance from lens reference plane to surface, Z.DDParameter Symbol Minimum Typical Maximum Units NotesMotion Delay t MOT-RST23ms From SW_RESET register write to valid motion, assuming after Reset motion is presentShutdown t STDWN50ms From Shutdown mode active to low currentWake from Shutdown t WAKEUP23ms From Shutdown mode inactive to valid motion.Notes: A RESET must be asserted after a shutdown.Refer to section “Notes on Shutdown and Forced Rest”,also note t MOT-RSTForced Rest Enable t REST-EN1s From RESTEN bits set to low currentWake from Forced Rest t REST-DIS1s From RESTEN bits cleared to valid motionMISO Rise Time t r-MISO150300ns C L = 100 pFMISO Fall Time t f-MISO150300ns C L = 100 pFMISO Delay after SCLK t DLY-MISO120ns From SCLK falling edge to MISO data valid, no loadconditionsMISO Hold Time t hold-MISO0.51/f SCLKµs Data held until next falling SCLK edgeMOSI Hold Time t hold-MOSI200ns Amount of time data is valid after SCLK rising edge MOSI Setup Time t setup-MOSI120ns From data valid to SCLK rising edgeSPI Time between t SWW30µs From rising SCLK for last bit of the first data byte, to rising Write Commands SCLK for last bit of the second data byte.SPI Time between Write t SWR20µs From rising SCLK for last bit of the first data byte, to rising and Read Commands SCLK for last bit of the second address byte.SPI Time between Read t SRW500ns From rising SCLK for last bit of the first data byte, to falling and Subsequent t SRR SCLK for the first bit of the address byte of the next Commands command.SPI Read Address-Data t SRAD4µs From rising SCLK for last bit of the address byte, to falling Delay SCLK for first bit of data being read.NCS Inactive after t BEXIT500ns Minimum NCS inactive time after motion burst before next Motion Burst SPI usageNCS to SCLK Active t NCS-SCLK120ns From NCS falling edge to first SCLK rising edgeSCLK to NCS Inactive t SCLK-NCS120ns From last SCLK rising edge to NCS rising edge, for valid MISO (for Read Operation)data transferSCLK to NCS Inactive t SCLK-NCS20µs From last SCLK rising edge to NCS rising edge, for valid MOSI (for Write Operation)data transferNCS to MISO High-Z t NCS-MISO500ns From NCS rising edge to MISO high-Z stateMOTION Rise Time t r-MOTION150300ns C L = 100 pFMOTION Fall Time t f-MOTION150300ns C L = 100 pFTransient Supply Current I DDT45mA Max supply current during a V DD ramp from 0 to 2.8 VDDParameter Symbol Minimum Typical Maximum Units NotesDC Supply Current in I DD_RUN410mA Average current, including LASER current. No load on Various Modes I DD_REST10.5 1.8MISO, MOTION.I DD_REST20.150.4I DD_REST30.050.15Peak Supply Current40mAShutdown Supply Current I DDSTDWN112µA NCS, SCLK = VDDMOSI = GNDMISO = Hi-ZInput Low Voltage V IL0.5V SCLK, MOSI, NCSInput High Voltage V IH V DD – 0.5V SCLK, MOSI, NCSInput Hysteresis V I_HYS100mV SCLK, MOSI, NCSInput Leakage Current I leak±1±10µA Vin = VDD -0.6 V, SCLK, MOSI, NCSXY_LASER Current I LAS0.8mA V xy_laser≥ 0.3 VLP_CFG0 = 0xFFLP_CFG1 = 0x00LASER Current I LAS_FAULT300uA XY_LASER R leakage < 75 kOhms to GND(Fault Mode)Output Low Voltage,V OL0.7V Iout = 1 mA, MISO, MOTIONMISO, LASER_NEN Iout = 1 mA, LASER_NENOutput High Voltage,V OH V DD – 0.7V Iout = -1 mA, MISO, MOTIONMISO, LASER_NEN Iout = -0.5 mA, LASER_NENInput Capacitance C in10pF MOSI, NCS, SCLKTypical Performance CharacteristicsFigure 11. Mean resolution vs. Z at 800 cpi.Figure 12. Average error vs. distance at 800 cpi .Figure 13. Wavelength responsivity.R E L A T I V E R E S P O N S I V I T YWAVELENGTH (nm)Power Management ModesThe ADNS-7050 has three power-saving modes. Each mode has a different motion detection period, affecting response time to mouse motion (Response Time). The sensor automatically changes to the appropriate mode, depending on the time since the last reported motion (Downshift Time). The parameters of each mode are shown in the following table.Mode Response Time (nominal)Downshift Time (nominal)Rest 116.5 ms 237 ms Rest 282 ms 8.4 s Rest 3410 ms504 sMotion Pin TimingThe motion pin is a level-sensitive output that signals the micro-controller when motion has occurred. The motion pin is lowered whenever the motion bit is set; in other words, whenever there is data in the Delta_X or Delta_Y registers. C learing t he m otion b it (by r eading D elta_X a nd D elta_Y, o r w riting to the Motion register) will put the motion pin high.LASER ModeFor power savings, the VCSEL will not be continuously on. ADNS-7050 will flash the VCSEL only when needed.Synchronous Serial PortThe synchronous serial port is used to set and read parameters in the ADNS-7050, and to read out the motion information.The port is a four-wire port. The host micro-controller always initiates com-munication; the ADNS-7050 never initiates data transfers. SCLK, MOSI, and NCS may be driven directly by a micro-controller. The port pins may be shared with other SPI slave devices. When the NCS pin is high, the inputs are ignored and the output is tri-stated.The lines that comprise the SPI port:SCLK:Clock input. It is always generated by the master (the micro-controller).MOSI:Input data. (Master Out/Slave In)MISO:Output data. (Master In/Slave Out)NCS:Chip select input (active low). NCS needs to be low to activate the serial port; otherwise, MISO will be high Z, and MOSI & SCLK will be ignored. NCS can also be used to reset the serial port in case of an error.Chip Select OperationThe serial port is activated after NCS goes low. If NCS is raised during a transaction, the entire transaction is aborted and the serial port will be reset.This is true for all transactions. After a transaction is aborted, the normal address-to-data or transaction-to-transaction delay is still required before beginning the next transaction. To improve communication reliability, all serial transactions should be framed by NCS. In other words, the port should not remain enabled during periods of non-use because ESD and EFT/B events could be interpreted as serial communication and put the chip into an un-known state. In addition, NCS must be raised after each burst-mode transac-tion is complete to terminate burst-mode. The port is not available for further use until burst-mode is terminated.Write OperationWrite operation, defined as data going from the micro-controller to the ADNS-7050, is always initiated by the micro-controller and consists of two bytes. The first byte contains the address (seven bits) and has a “1” as its MSB to indicate data direction. The second byte contains the data. The ADNS-7050 reads MOSI on rising edges of SCLK.Figure14. Write operation.Figure 15. MOSI setup and hold time.11234567891011121314151621D 0D5D 6D 7A 0A 1A 2A 3A 4A 5A 61A 6D 4D 3D 2D 1SCLK NCSMOSIMOSI DRIVEN BY MICRO-CONTROLLERMISOsetup, MOSISCLKMOSIRead OperationA read operation, defined as data going from the ADNS-7050 to the micro-controller, is always initiated by the micro-controller and consists of two bytes. The first byte contains the address, is sent by the micro-controller over MOSI, and has a “0” as its MSB to indicate data direction. The second byte contains the data and is driven by the ADNS-7050 over MISO. The sensor outputs MISO bits on falling edges of SCLK and samples MOSI bits on every rising edge of SCLK.Figure 16. Read operation.Figure 17. MISO delay and hold time.Note: The 0.5/fSCLK minimums high state of SCLK is also the minimum MISO data hold time of the ADNS-7050. Since the falling edge of SCLK is actually the start of the next read or write command, the ADNS-7050 will hold the state of data on MISO until the falling edge of SCLK.Required Timing Between Read and Write CommandsThere are minimum timing requirements between read and write com-mands on the serial port.Figure 18. Timing between two write commands.SCLK NCS SCLK MOSIMISOt WRITE OPERATION WRITE OPERATIONIf the rising edge of the SCLK for the last data bit of the second write command occurs before the required delay (t SWW ), then the first write com-mand may not complete correctly.Figure 19. Timing between write and read commands.If the rising edge of SCLK for the last address bit of the read command occurs before the required delay (t SWR ), the write command may not com-plete correctly.Figure 20. Timing between read and either write or subsequent read commands.During a read operation SCLK should be delayed at least t SRAD after the last address data bit to ensure that the ADNS-7050 has time to prepare the requested data. The falling edge of SCLK for the first address bit of either the read or write command must be at least t SRR or t SRW after the last SCLK rising edge of the last data bit of the previous read operation.Burst Mode OperationBurst mode is a special serial port operation mode that may be used to reduce the serial transaction time for a motion read. The speed improve-ment is achieved by continuous data clocking to or from multiple registers without the need to specify the register address, and by not requiring the normal delay period between data bytes.Burst mode is activated by reading the Motion_Burst register. The ADNS-7050 will respond with the contents of the Motion, Delta_X, Delta_Y, SQUAL,Shutter_Upper, Shutter_Lower, and Maximum_Pixel registers in that or-der. The burst transaction can be terminated anywhere in the sequence after the Delta_X value by bringing the NCS pin high. After sending the register address, the micro-controller must wait t SRAD and then begin read-ing data. All data bits can be read with no delay between bytes by driving SCLK at the normal rate. The data are latched into the output buffer after the last address bit is received. After the burst transmission is complete, the micro-controller must raise the NCS line for at least t BEXIT to terminate burst mode. The serial port is not available for use until it is reset with NCS, even for a second burst transmission.Figure 21. Motion burst timing.WRITE OPERATION NEXT READ OPERATION• • •READ OPERATIONNEXT READor WRITE OPERATION• • •MOTION_BURST REGISTER ADDRESSREAD FIRST BYTEFIRST READ OPERATION READ SECOND BYTE READ THIRD BYTESCLK• • •Notes on Power-upThe ADNS-7050 does not perform an internal power up self-reset; thePOWER_UP_RESET register must be written every time power is applied.The appropriate sequence is as follows:1.Apply power2.Drive NCS high, then low to reset the SPI port3.Write 0x5a to register 0x3a4.Wait for t WAKEUP5.Write 0xFE to register 0x286.Read from registers 0x02, 0x03, and 0x04 (or read these same 3 bytesfrom burst motion register 0x42) one time regardless of the motion pinstate.During power-up there will be a period of time after the power supply ishigh but before any clocks are available. The table below shows the state ofthe various pins during power-up and reset.State of Signal Pins after VDD is ValidPin On Power-Up NCS High before Reset NCS Low before Reset After Reset NCS Functional Hi Low Functional MISO Undefined Undefined Functional Depends on NCS SCLK Ignored Ignored Functional Depends on NCS MOSI Ignored Ignored Functional Depends on NCS XY_LASER Undefined Undefined Undefined Functional MOTION Undefined Undefined Undefined Functional LASER_NEN Undefined Undefined Undefined FunctionalNotes on Shutdown and Forced RestThe ADNS-7050 can be set in Rest mode through the Configuration_Bits register (0x11). This is to allow for further power savings in applications where the sensor does not need to operate all the time.The ADNS-7050 can be set in Shutdown mode by writing 0xe7 to register 0x3b. The SPI port should not be accessed when Shutdown mode is as-serted, except the power-up command (writing 0x5a to register 0x3a). (Other ICs on the same SPI bus can be accessed, as long as the sensor’s NCS pin is not asserted.) The table below shows the state of various pins during shut-down. To deassert Shutdown mode:1. Write 0x5a to register 0x3a.2. Wait for t WAKEUP.3. Write 0xFE to register 0x28.4. Any register settings must then be reloaded.Pin Status when Shutdown ModeNCS Functional*1MISO Undefined*2SCLK Ignore if NCS = 1*3MOSI Ignore if NCS = 1*4XYLASER High(Off)LASER_NEN High(Off)MOTION Undefined *2*1 NCS pin must be held to 1 (high) if SPI bus is shared with other devices. It is recommended to hold to 1 (high) during Power Down unless powering up the Sensor. It must be held to 0 (low) if the sensor is to be re-powered up from shutdown (writing 0x5a to register 0x3a).*2 Depend on last state.*3 SCLK is ignore if NCS is 1 (high). It is functional if NCS is 0 (low).*4 MOSI is ignore if NCS is 1 (high). If NCS is 0 (low), any command present on the MOSI pin will be ignored except power-up command (writing 0x5a to register 0x3a).Note: There are long wakeup times from shutdown and forced Rest. These features should not be used for power management during normal mouse motion.。
无线鼠标原理图

几种鼠标电路图1、USB接口鼠标电路图2、电脑无线鼠标电路图3、光电鼠标电路图4、鼠标电路图5、有线USB 光学游戏鼠标电路图A5020方案6、有线USB激光鼠标电路图7、3键USB 有线激光游戏鼠标电路图A7550+CY63743方案8、自制无线鼠标电路图光电鼠标电路图1、两款光电鼠标电路光电鼠标电路一般由两片集成电路与外围元件组成。
一片稍大的是COMS 感光集成电路,另一片一般为鼠标专用集成电路。
CMOS 感光芯片通过检测光电部件因鼠标移动产生的光线变化而得到位置信号,送到鼠标专用集成电路的X、Y 输入端。
而鼠标专用集成电路再检测左、右按键,滚轮键及滚轮前后转到等信息随着CLK时钟信号一起传输给计算机的PS2 或USB 端口。
USB 光电鼠标电路图①为使用GL603 - USB 鼠标集成电路芯片和H2000(400CPI、每秒1500 次扫描) 光电感应芯片的USB 光电鼠标电路图。
PS2 接口鼠标电路图②为使用PAN101 - 208 (800CPI 光学分辨率,2000 次扫描/ 秒) 光电感应芯片和84510 系列鼠标集成电路芯片的PS2 接口光电鼠标电路。
2、光电鼠标原理与电路图传统光学鼠标的工作原理传统光学鼠标工作原理示意图光学跟踪引擎部分横界面示意图光学鼠标主要由四部分的核心组件构成,分别是发光二极管、透镜组件、光学引擎(Optical Engine)以及控制芯片组成。
光学鼠标通过底部的LED灯,灯光以30度角射向桌面,照射出粗糙的表面所产生的阴影,然后再通过平面的折射透过另外一块透镜反馈到传感器上。
当鼠标移动的时候,成像传感器录得连续的图案,然后通过“数字信号处理器”(DSP)对每张图片的前后对比分析处理,以判断鼠标移动的方向以及位移,从而得出鼠标x, y方向的移动数值。
再通过SPI 传给鼠标的微型控制单元(Micro Controller Unit)。
鼠标的处理器对这些数值处理之后,传给电脑主机。
无线鼠标 键盘DIY电路图
无线鼠标键盘DIY电路图
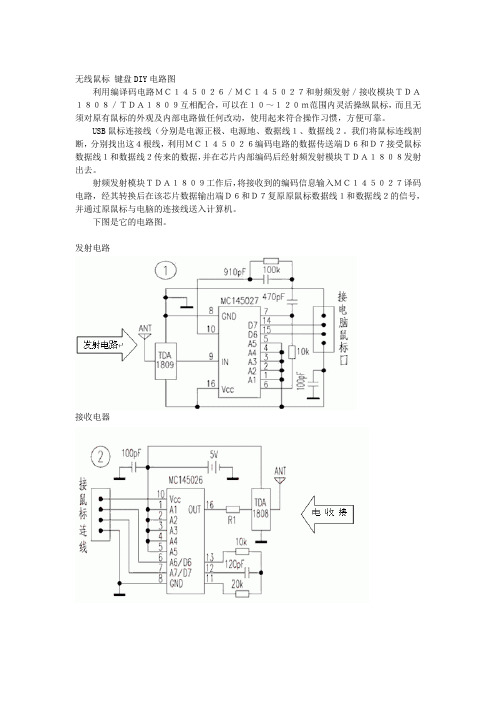
利用编译码电路MC145026/MC145027和射频发射/接收模块TDA1808/TDA1809互相配合,可以在10~120m范围内灵活操纵鼠标,而且无须对原有鼠标的外观及内部电路做任何改动,使用起来符合操作习惯,方便可靠。
USB鼠标连接线(分别是电源正极、电源地、数据线1、数据线2。
我们将鼠标连线割断,分别找出这4根线,利用MC145026编码电路的数据传送端D6和D7接受鼠标数据线1和数据线2传来的数据,并在芯片内部编码后经射频发射模块TDA1808发射出去。
射频发射模块TDA1809工作后,将接收到的编码信息输入MC145027译码电路,经其转换后在该芯片数据输出端D6和D7复原原鼠标数据线1和数据线2的信号,并通过原鼠标与电脑的连接线送入计算机。
下图是它的电路图。
发射电路
接收电器。
基于单片机的无线鼠标的设计
基于单片机的无线鼠标的设计摘要随着计算机的不断普及,计算机周边器件之中的鼠标也得到了迅速的发展。
无线鼠标则是电脑周边器件与无线通信技术的完美结合物。
MSP430单片机是一种通常用于家庭的高性能低功耗的人机接口设备(HID)应用,如:无线鼠标或键盘。
本应用报告描述了一个全功能的无线鼠标的参考设计,由MSP430单片机组成的超低功耗微控制器。
该方案解决了无线鼠标三个部分,包括Avago Technologies的超低功耗的ADNS - 3040光学鼠标传感器,以及TRF7950 27兆赫发射模块,相应的USB接收适配器都进行了讨论。
完整的硬件示意图,无线鼠标发射原理图,USB无线接收示意图,与源代码都提供了一个完整的参考设计方案。
可以实现基于MSP430单片机无线鼠标的设计。
关键词单片机;光学鼠标传感器;发射模块;USB接收适配器Wireless mouse with MCU DesignSchool of Physics and Electronic Information, Huaibei Coal Industuy Terachers College, 235000Abstract Wireless Mouse is a computer peripheral device and wireless communication technology the perfect combination of things. MSP430 MCU is a commonly used family of many high-performance low-power human interface device (HID) applications, such as: wireless mouse or keyboard.This application report describes a fully functional wireless mouse reference design, from the composition of ultra-low power MSP430 MCU microcontrollers. The program solves the wireless mouse three parts, including Avago Technologies of the ultra-low-power ADNS - 3040 optical mouse sensor, as well as the TRF7950 27 MHz transmitter module, the corresponding USB receiver adapters are discussed. A complete hardware schematic diagram launches wireless mouse, USB wireless receiver schematic, with the source code provides a complete reference design. Based on MSP430 MCU enables wireless mouse design.Keywords Microcontroller; optical mouse sensor; Transmitter Module; USB Receiver Adapter目录1导言 (5)2 鼠标发射机的硬件体系结构 (6)2.1 MSP430 单片机 (6)2.1.1 MSP430 单片机的特点 (7)2.1.2 振荡器和定时器 (8)2.1.3 MSP430单片机I/O端口控制特点 (10)2.1.4 MSP430与IIC总线器件接口 (11)2.1.5 调试接口 (12)2.1.6 中断 (12)2.2 ADNS-3040光学鼠标传感器 (13)2.3 27 - MHz的TRF7950发射模块 (14)2.4 机械组件(滚轮和按钮) (14)3 USB接收适配器 (16)3.1 TRF 7900 27-MHz的RF接收器 (16)3.2 CY7C63743USB微控制器 (17)3.3 MSP430低功耗模式 (17)4 鼠标发射机:软件体系结构 (18)4.1 滚动轮解码原理图: (18)4.2 ADNS-3040光学鼠标传感器设备的驱动程序 (18)4.3 米勒编码体系流程图和循环校验码 (19)4.3.1 米勒编码 (19)4.3.2 循环校验编码 (20)4.4 TRF7950发射机设备驱动程序 (20)5 结论 (22)6 参考文献 (22)附录一:无线鼠标发射原理图.............. 错误!未定义书签。
介绍无线鼠标电路图
介绍无线鼠标电路图<<版权声明:本文由容源电子网(www_dziuu_com)整理提供,部分内容来源于网络,如有侵犯到你的权利请与我们联系更正。
》该装置编译码电路MC145026/MC145027和射频发射/接收模块TDA1808/TDA1809互相配合,可以在10~120m范围内灵活操纵鼠标,而且制作时无须对原有鼠标的外观及内部电路做改动,使用起来符合操作习惯,方便可靠,非常适合爱好者自制。
<<版权声明:本文由容源电子网(www_dziuu_com)整理提供,部分内容来源于网络,如有侵犯到你的权利请与我们联系更正。
》下,鼠标与电脑的连接线内部有4根电路连接线(该电路装置最多可以接受4条数据线输入,读者可根据自己鼠标的选择)分别是电源正极、电源地、数据线1、数据线2。
<<版权声明:本文由容源电子网(www_dziuu_com)整理提供,部分内容来源于网络,如有侵犯到你的权利请与我们联系更正。
》我们将鼠标连线割断,分别找出这4根线,MC145026编码电路的数据传送端D6和D7接受鼠标数据线1和数据线2传来的数据,并在芯片内部编码后经射频发射模块TDA1808发射出去。
<<版权声明:本文由容源电子网(www_dziuu_com)整理提供,部分内容来源于网络,如有侵犯到你的权利请与我们联系更正。
》射频发射模块TDA1809工作后,将接收到的编码信息输入MC145027译码电路,经其转换后在该芯片数据输出端D6和D7复原原鼠标数据线1和数据线2的信号,并通过原鼠标与电脑的连接线送入计算机。
可以看出,上述电路无须改动鼠标及计算机,无须安装额外的鼠标驱动软件,原有鼠标的功能亦能正常使用。
<<版权声明:本文由容源电子网(www_dziuu_com)整理提供,部分内容来源于网络,如有侵犯到你的权利请与我们联系更正。
无线遥控鼠标电路设计
摘要本论文设计了一套无线遥控鼠标硬件电路,通过设计将光电鼠标的左右移动动作和对左键或右键选中的操作转换成开关信号,用方波电路产生的方波信号代替原鼠标内光敏传感器的脉冲信号,用相应的开关动作可以实现鼠标光标移动和鼠标的单、双击操作。
而用发射和接收电路代替原来的鼠标线,可以实现鼠标的遥控。
本设计是基于PT2262编码电路以及PT2272解码电路实现无线遥控鼠标电路的设计,可实现鼠标的长距离遥控,遥控距离为1~50米,其中的电路设计包括发射模块(含编码电路)、接收模块(含解码电路)、方波发生电路、开关电路和控制门电路等电路的设计及它们之间的连接、匹配。
PT2262编码电路中,振荡器中心的频率的调整,主要靠调整微调电容V2的值来实现,该电容容量可变范围为2~10μPF,振荡器频率可变范围约为260~300MHZ。
此外,本论文详细介绍了系统编码的过程及解码的过程、鼠标按键方案设计、简易光电鼠标原理图,以及本设计具有的优越性能、缺陷及改进的方案。
关键词鼠标,遥控,编码电路,解码电路ABSTRACTThis paper designed a wireless remote control mouse hardware circuits, optical mice will be designed by the action and movement around the left or right-selected into the operation of switching signals, with the square-wave circuit to replace the original square-wave signals Photosensitive mouse, the sensor pulse, the switch with the corresponding action can be achieved mouse cursor movement and the mouse single, double-click operation. And with transmitting and receiving circuit lines instead of the original mouse, the mouse can achieve the remote control.The design is based on the PT2262 coding circuit and decoding circuit PT2272 wireless mouse remote control circuit is designed to achieve the long-distance remote control mouse, remote control distance of 1 to 50 meters, of which the circuit design including the launch module (including coding circuit), receiver Modules (including decoding circuit), square-wave circuit, the circuit switching and control circuits, such as the gate circuit design and the connection between them, match. PT2262 coding circuit, the frequency oscillator Centre adjustments, relying mainly on fine-tuning capacitor V2 adjustment to achieve the value of the variable capacitor capacity of the range of 2 ~ 10 PF, the oscillator frequency variable area of about 260 ~ 300 MHZ.In addition, the paper details of the system of encoding and decoding process of the process, the mouse button design, simple optical mice schematics, as well as the advantages of this design can, defects and improve the programme.Key words mouse,remote control,coding circuit,decoding circuit目录摘要 (I)ABSTRACT (V)一绪论 (6)1.1无线鼠标研究的背景和意义 (6)1.2 无线鼠标研究的现状 (6)1.3系统研究发展的趋势 (7)1.4无线遥控技术的发展及相关理论 (8)1.4.1业余无线电常识 (8)1.4.2电波的传播方式 (9)1.4.3业余无线电波段的传播规律 (10)1.5本系统研究的内容 (13)二系统方案设计 (14)2.1设计的方案及系统框图 (14)2.1.1方案的提出 (14)2.1.2发射模块和接收模块的电路的实现方案 (15)2.2 无线光机鼠标方案 (19)2.3 方案的论证 (20)2.4 方案的选定 (21)2.5 光电鼠标电路 (21)三系统的硬件设计 (24)3.1 系统硬件电路设计方框图 (24)3.2 系统硬件设计的概述 (24)3.2.1 遥控发射电路 (24)3.2.2无线接收和译码电路 (26)3.2.3 编码解码芯片PT2262/PT2272芯片原理简介 (26)3.2.4 PT2262芯片介绍 (27)3.2.5 PT2272芯片介绍 (28)3.2.6 位脉冲宽度 (30)3.2.7 PT2262/2272芯片的地址编码设定和修改 (31)3.3 鼠标按键的方案 (32)3.4方波电路的设计 (33)3.5 控制门电路 (34)3.6 硬件电路图 (35)四系统的组装与调试 (377)4.1所用的仪器、仪表 (37)4.2调试方法和步骤 (37)4.3 误差分析 (37)五改进建议 (39)六结论 (40)七结束语 (4141)参考文献 (42)附录A:PT2262编码电路 (43)附录B:PT2272解码电路 (44)附录C:所用元件列表 (45)致谢 (46)一绪论1.1无线鼠标研究的背景和意义在电子技术日益发展的今天, 由于配件价格的不断下调,人们逐渐从2D中脱离出来,逐渐迈向了3D,而正在一些厂家大打价格战,有些有远见的厂家从价格战中脱离出来,于是科技含量较高的无线技术应运而生。
无线鼠标原理图

几种鼠标电路图1、USB接口鼠标电路图2、电脑无线鼠标电路图3、光电鼠标电路图4、鼠标电路图5、有线USB 光学游戏鼠标电路图A5020方案6、有线USB激光鼠标电路图7、3键USB 有线激光游戏鼠标电路图A7550+CY63743方案8、自制无线鼠标电路图光电鼠标电路图1、两款光电鼠标电路光电鼠标电路一般由两片集成电路与外围元件组成。
一片稍大的是COMS 感光集成电路,另一片一般为鼠标专用集成电路。
CMOS 感光芯片通过检测光电部件因鼠标移动产生的光线变化而得到位置信号,送到鼠标专用集成电路的X、Y 输入端。
而鼠标专用集成电路再检测左、右按键,滚轮键及滚轮前后转到等信息随着CLK时钟信号一起传输给计算机的PS2 或USB 端口。
USB 光电鼠标电路图①为使用GL603 - USB 鼠标集成电路芯片和H2000(400CPI、每秒1500 次扫描) 光电感应芯片的USB 光电鼠标电路图。
PS2 接口鼠标电路图②为使用PAN101 - 208 (800CPI 光学分辨率,2000 次扫描/ 秒) 光电感应芯片和84510 系列鼠标集成电路芯片的PS2 接口光电鼠标电路。
2、光电鼠标原理与电路图传统光学鼠标的工作原理传统光学鼠标工作原理示意图光学跟踪引擎局部横界面示意图光学鼠标主要由四局部的核心组件构成,分别是发光二极管、透镜组件、光学引擎〔Optical Engine〕以及控制芯片组成。
光学鼠标通过底部的LED灯,灯光以30度角射向桌面,照射出粗糙的外表所产生的阴影,然后再通过平面的折射透过另外一块透镜反应到传感器上。
当鼠标移动的时候,成像传感器录得连续的图案,然后通过“数字信号处理器〞(DSP)对每张图片的前后比照分析处理,以判断鼠标移动的方向以及位移,从而得出鼠标x, y方向的移动数值。
再通过SPI传给鼠标的微型控制单元〔Micro Controller Unit〕。
鼠标的处理器对这些数值处理之后,传给电脑主机。
单片机无线键盘的电路设计
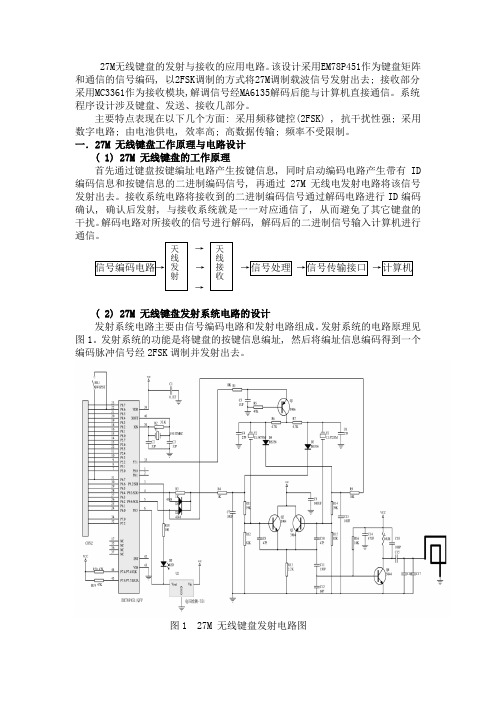
27M 无线键盘的发射与接收的应用电路。
该设计采用EM78P451作为键盘矩阵和通信的信号编码, 以2FSK 调制的方式将27M 调制载波信号发射出去; 接收部分采用MC3361作为接收模块,解调信号经MA6135解码后能与计算机直接通信。
系统程序设计涉及键盘、发送、接收几部分。
主要特点表现在以下几个方面: 采用频移键控(2FSK) , 抗干扰性强; 采用数字电路; 由电池供电, 效率高; 高数据传输; 频率不受限制。
一.27M 无线键盘工作原理与电路设计( 1) 27M 无线键盘的工作原理首先通过键盘按键编址电路产生按键信息, 同时启动编码电路产生带有ID 编码信息和按键信息的二进制编码信号, 再通过27M 无线电发射电路将该信号发射出去。
接收系统电路将接收到的二进制编码信号通过解码电路进行ID 编码确认, 确认后发射, 与接收系统就是一一对应通信了, 从而避免了其它键盘的干扰。
解码电路对所接收的信号进行解码, 解码后的二进制信号输入计算机进行通信。
→→→( 2) 27M 无线键盘发射系统电路的设计发射系统电路主要由信号编码电路和发射电路组成。
发射系统的电路原理见图1。
发射系统的功能是将键盘的按键信息编址, 然后将编址信息编码得到一个编码脉冲信号经2FSK 调制并发射出去。
图1 27M 无线键盘发射电路图①信号编码: 信号编码电路采用编码芯片EM78P451, 该芯片是一个44引脚、采用高速CMOS工艺制造的低功耗8位单片机, 含有4K ×13位片内ROM, 5个双向I/O端口, 8位实时定时/计数器, 11个特殊功能寄存器, 140 ×8位通用寄存器。
该芯片能将按键信息进行编址, 并将编址信息进行编码(包含了ID 码, 对频码和按键码) , 然后将编码后得到的数字脉冲信号输送到发射电路。
② 27M高频发射电路: 27M高频发射电路采用2FSK调制方式, 当有数字脉冲信号输送到发射电路中, 即EM78P451 的P7. 1 脚输出信号。
无线鼠标电路图
MosArt semiconductor corporation
5
ATA1168 RF Optical Mouse SOC
5. Assembly and Outline drawing
Assembly
Recommended PCB Mechanical Drawing (Unit: mm)
Assembly Drawing (Unit: mm)
ATA1168
RF Optical Mouse SOC
(27Mhz)
Specification 2.0
MosArt
SEMICONDUTOR CORP.
2008 All rights reserved
ATA1168 RF Optical Mouse SOC
Content
1. General Description ....................................................... 1 2. Features.......................................................................... 2 3. Block Diagram ............................................................... 3 4. Package type and pin description .................................. 4 5. Assembly and Outline drawing ...................................... 6 6. Function Description ..................................................... 8 7. Electrical Characteristics............................................. 10 8. Reference Application circuit....................................... 11
鼠标是怎么工作的?如何自制一个无线鼠标?快来围观

鼠标是怎么工作的?如何自制一个无线鼠标?快来围观鼠标——电脑的一个标准配件如果你买电脑没有买鼠标,一定会被人笑话的鼠标鼠标自1964年发明出来到现在,陪伴着计算机走过了无数个年华古老的鼠标那它是如何工作的呢?一起来了解一下吧鼠标的工作原理鼠标内部有一个发光二极管,它会发出光线照亮鼠标底部表面鼠标的发光二极管而发光二极管发出的光线经鼠标垫反射回来到光线感应器件,被记录成图像信号光感应器件当鼠标移动时,其图像信号会被不断的记录下来,送入内部的图像处理芯片DSP(DSP属于单片机,主要用来做图形处理)进行比较,对比图形变化来确定鼠标移动距离和方向图形处理类单片机DSP鼠标主要分为两类——有线和无线鼠标他们的主要电路区别其实不大,无线鼠标仅比有线鼠标多了无线接收和发射部分,我们可以通过自己DIY来自己制作无线鼠标多了无线部分的鼠标有线鼠标电路原理图有线鼠标电路原理图如图所示,PAN101B是一个是一个光学传感器,它捕获到的光电信号送入鼠标专用芯片84510中进行处理后传到PS2接口和电脑进行通信如何自制无线鼠标对于USB鼠标来说,它总共有四根线,分别是电源正极,电源负极,DATA+,DATA-USB数据线定义我们只需把鼠标的USB线截断,把鼠标部分的USB线接入如下图的电路板中即可无线鼠标发射部分发射部分利用编码芯片MC145026将鼠标要传送的USB格式数据编码,并通过TDA1808无线发射模块发射出去接收部分接收部分使用TDA1809接收发射部分传过来的无线信号,送给和MC145026配对的解码芯片MC145027解码后传到电脑USB口,完成数据的无线传送关注作者,学习更多电子电路知识,感谢您的阅读!。
无线键盘、鼠标工作原理
2.4 GHz无线鼠标键盘接收器的设计∙随着无线通信技术的不断发展,近距离无线通信领域出现了蓝牙、RFID、WIFI等技术。
这些技术不断应用在嵌入式设备及PC外设中。
2.4 GHz无线鼠标键盘使用24~2.483 5 GHz无线频段,该频段在全球大多数国家属于免授权使用,这为无线产品的普及扫清了最大障碍。
用户可迅速地进入与世界同步的无线设计领域,最大限度地缩短设计和生产时间,并且具有完美性能,能够替代蓝牙技术。
1 系统硬件结构∙2.4 GHz无线鼠标键盘接收器主要实现鼠标、键盘等HID类设备在PC机上的枚举识别过程和接收无线鼠标或键盘发送的数据(包括按键值、鼠标的上下左右移动等),并将接收到的数据通过USB接口传送给PC机,实现鼠标键盘的无线控制功能。
接收器主要由USB接口部分、MCU和无线接收部分组成。
系统硬件框图如图l所示。
1. 1 USB接口部分系统采用H OLT EK公司生产的8位USB多媒体键盘编码器HT82K95E作为系统核心。
鼠标、键盘等HID类设备为低速设备,所以接收器要能同时实现鼠标和键盘数据同PC机的双向传输。
MCU首先必须具有低速的USB接口,并且最少支持3个端点(包括端点O)。
综合考虑选用了 HT82K95E作为本系统的主控芯片。
本系统的USB接口部分电路图如图2所示,其中电阻R100、R101、R102、R103、R104和电容C102、C114和C115用于EMC。
由于鼠标和键盘设备属于从设备,所以应在USB-信号线上加1.5 kΩ的上拉电阻。
1.2 MCU部分MCU的复位电路采用由R108和C105组成的RC积分电路实现上电复位功能。
上电瞬间,由于电容电压不能突变,所以复位引脚为低电平,然后电容开始缓慢充电,复位引脚电位开始升高,最后变为高电平,完成芯片的上电复位。
HT82K95E微控制器内部还包含一个低电压复位电路(LVR),用于监视设备的供电电压。
如果设备的供电电压下降到0.9 V~VLVR的范围内并且超过1 ms的时间,那么LVR就会自动复位设备。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
无线鼠标/键盘DIY电路图此无线鼠标/键盘在制作时无须对原有鼠标的外观及内部电路做任何改动,使用起来符合操作习惯,方便可靠,非常适合爱好者自制。
其工作原理是利用编译码电路MC145026/MC145027和射频发射/接收模块TDA1808/TDA1809互相配合,可以在10~120m范围内灵活操纵鼠标。
一般情况下,鼠标与电脑的连接线内部有4根电路连接线,它们是电源正极、电源地、数据线1、数据线2。
先去电脑城去购买一只PS2插座和1个PS2插头(用废弃的鼠标或键盘插头也可以),然后将接口中的这4根线,与图中所画出的连接起来,利用MC145026编码电路的数据传送端D6和D7接受鼠标数据线1和数据线2传来的数据,并在芯片内部编码后经射频发射模块TDA1808发射出去。
射频发射模块TDA1809工作后,将接收到的编码信息输入 MC145027译码电路,经其转换后在该芯片数据输出端D6和D7复原原鼠标数据线1和数据线2的信号,将D6、D7、电源正、电源地对应接上PS2插头,然后连接电脑,即可搞定。
可以看出,上述电路无须改动鼠标/键盘及计算机,无须安装额外的驱动软件,原有鼠标/键盘的所有功能亦能正常使用。
此电路(见图 1、图 2)只要所选元件正常,无须调试即可工作。
此电路目的就是起一个无线载体传输的作用,编译码电路是为了防止外界干。