基于CCD的侧向激光雷达系统研制及探测个例
基于激光雷达的车载防撞系统的设计
基于激光雷达的车载防撞系统的设计中文摘要:近年来,我国道路交通安全的形势仍然非常严峻。
如果在交通事故发生之前向驾驶员发出警告,让驾驶员能够采取一定的避免措施,就能有效地减少交通事故的发生,从而保障人身财产安全。
论文中主要介绍了一种基于激光雷达的车载防撞系统,并给出了可能实现的设计方法,描述了该防撞系统能够实现的功能,以及提出了有效避免车辆相撞的方案。
论文包括对硬件选型的描述,硬件电路的设计,以及软件框图的实现方法。
距离传感器采用的是激光传感器,单片机采用的是fresscale的MC9S12C32型号。
本文设计的系统采取两种措施,一种是蜂鸣器报警,另一种是在极端紧急的情况下,通过CAN总线对ABS发出制动信号,进行紧急刹车。
激光传感器向汽车前方不断发射激光束,在收到反射回波后计算出于本车的距离,方向角,以及与本车之间的相对速度。
单片机通过一个通信模块不断的向激光传感器采集数据,再经过软件程序计算,判断汽车是否处于安全状态,如果处于安全状态,单片机继续采集数据,如果处于危险状态,单片机发出控制信号,驱动声音报警电路进行报警,如果处于紧急情况,单片机通过汽车CAN总线向制动装置ABS发出控制信号,采取自动刹车。
关键词:防撞预警,激光雷达测距,单片机,CAN总线第一章引言随着社会的进步,国民经济得到迅速的发展,人民生活生活水平的不断提高,公路交通作为国民经济的重要枢纽近年来受到极大重视,国家和各级政府都对公里建设投入了大量的资金、人力和物力。
“九五”期间,我国的高速公路建设达到了11万公里,行驶的车辆速度再80km/h以上,一旦发生碰撞,后果不堪设想,故要求驾驶员注意力高度集中,时刻注意路况信息,增加了驾驶员的劳动强度。
另外,公路建设的同时,也带动了民族汽车工业的快速发展,20世纪末,我国的汽车产量比1993年翻一番,2010年,汽车产量又翻了一番,汽车数量逐年增长,越来越多的人拥有私人汽车,近年来,借助于电子控制技术的飞速发展,汽车的操纵性能和运动性能得到很快的提高。
激光雷达考试浓缩笔记

一、技术介绍1.激光雷达概念:激光探测与测量,Light Detection And Ranging,英文缩写为LiDAR,LiDAR的光源一般采用激光,原理与雷达原理相同,故都将LiDAR翻译为激光雷达,也可称为激光扫描仪。
工作原理:脉冲式和相位式,它有激光发射器、接收器、时间计数器、微电脑构成,成像为点云,并以数据为基础重建目标三维模型。
(相位式问题:相位测量仅能测出不足一周的相位差,相位差的分辨率限制测距的精度,为了保证精度而又兼顾测程,采用几个调制光波长配合测距。
)激光扫面技术分类:1D激光测距、2D激光测距、3D激光测距、多传感器的集成激光雷达和普通雷达的区别:普通雷达:射频电磁波被送到大气中,大气中的目标散射发射电磁波的一部分到普通雷达的接收器中。
激光雷达也发射和接收电磁波,但其频率相对较高,激光雷达工作在紫外光、可见光、近外红三个光谱波段激光雷达存在的问题两点同步难匹配、数据处理自动化程度低测量复杂度高、仪器昂贵、操作人员需要较高技巧、生产成本高、费时对天气、可见度等自然条件要求高很难获取较全面的信息2.三维激光扫描技术概念:三维激光扫描系统:由三维激光扫描仪、计算机、电源供应系统、支架以及系统配套软件构成、而三维激光扫描仪又由激光发射器、接收器、时间计数器、马达控制可旋转的滤光镜、控制电路板、微电脑、CCD相机以及软件组成。
三维激光扫描技术是一种先进的全自动高精度立体扫描技术,用三维激光扫描仪获取目标物表面各点的空间坐标,然后由获得的测量数据构造出目标物的三维模型的一种全自动测量技术。
是继GPS后的又一项测绘新技术,已成为空间数据获取的重要技术手段。
原理:三维激光扫描仪发射器发出一个激光脉冲信号,经物体表面漫反射后沿几乎相同的路径反向传回到接收器,可以计算目标点P与扫描仪距离S。
激光测距技术是三维激光扫描仪的主要技术之一,激光测距的原理主要有基于脉冲测距法、干涉测距法、激光三角法三种类型。
CCD 成像探测器
CCD成像探测器朱耆祥人类感知外部世界主要是通过视觉、触觉、听觉和嗅觉等感觉器官获取各种信息的,其中约80%的信息是由视觉获取的。
很早以前人们就幻想“千里眼”,借助于它人们可以看到千里之外的一切。
这一幻想在成像探测器出现以后已经成为现实。
到今天人们不只是看到了千里之外人眼所能看到的一切,而且可以获取人眼看不到的信息。
所有这一切都归功于成像探测器。
成像探测器有很多种类,目前应用最多、最广的是电荷耦合阵列探测器——CCD(Charge Coupled Devices)成像器件。
1970年美国贝尔实验室的威拉德·博伊尔和乔治·史密斯首先提出了CCD的概念,以后又建立了一维势阱模型为基础的CCD基本理论。
近四十年的不断发展,到今天CCD已经成为从哈勃望远镜、登月空间飞行器和火星探测器到我们日常生活中的很多用具,如手机、电视等都离不开的成像探测器。
CCD成像探测器像人的视网膜,它和相应的光学系统结合被放在空间、地面、水中、机器中、甚至人体内,代替了人的眼睛,对所有人们感兴趣的目标进行观察和记录。
提供给人们大量的信息,以进行各方面的分析、考察和使用。
CCD 在人类的各项活动中:日常生活、生产建设、交通运输、通信联络、安全保卫、医疗卫生、科学研究、军事装备等各方面都起到重大的、不可取代的作用。
随着CCD应用领域的扩大,使用要求的不断增新,其结构性能也不断发展变化以适应不断发展的使用要求。
目前已出现了多种CCD的结构类型,从紫外到超长波红外不同波段的探测器。
随着使用要求的日益更新,CCD探测器也面临着其他类型成像探测器的非常激烈的竞争。
也许在不久的将来CCD会被另一种成像探测器所取代。
CCD的工作原理和结构CCD成像探测器(芯片)的主要功能是:光电转换、电荷储存、电荷转移、电子图像的生成和输出。
由此,CCD相机的主要组成有:CCD芯片、驱动电路、信号处理电路、输出接口电路及探测器的机械部分。
机载激光雷达测量系统解析ppt课件
LIDAR:AeroScan
INSAR:Star-3i
主要技术 参数
飞行高度:8000英尺; 频率:1500HZ; 带宽:1.8km; 4m点间距;
飞行高度:20000英尺; 频率:15000HZ; 带宽:8km; 5m间距;
主要 优点
垂直方向精度±15cm; 小区域及走廊区域最为理想;
非常适合植被覆盖和裸露区的真 实DEM提取; 扫描角内提供大范围扫描;
高精度高空间分辨率的森林或山区真实数字地面 模型 ③ 基本不需要地面控制点,地形数据采集速度快 ④ 作业安全 ⑤ 作业周期快,易于更新 ⑥ 时效性强 ⑦ 将信息获取、信息处理及应用技术纳入同一系统 中,有利于提高自动化高速化程度
4 机载激光雷达与机载InSAR的比较
4 机载激光雷达与机载InSAR的比较
6 工作流程及内业数据处理
飞行计划
GPS数据质量检查
系统参数测定和检校
航迹计算 激光脚点位置计算
外业数据采集
激光点云生成 分割
野外初步质量分析和控制
否 是
数据内业后处理
自动分类 内部QA/QC
手工分类 最后QA/QC
小结
1. 机载激光雷达测量的系统组成、激光扫描测距的 原理、动态GNSS定位、INS姿态测量系统、 GPS确定姿态的基本原理和方法
机载激光雷达测量系统的组成单元
测距单元
控制、监测、记 录单元
差分GPS 惯性测量单元
扫描仪
激光脚点 扫描方向
扫描带宽
激光雷达测距系统
•定义
包括:激光脉冲测距系统、光电扫描仪 及控制处理系统 原YA理G 激:光脉器冲是测以钇时铝测石距榴和石晶激体光为相基位质差的一测种距固
体 激光器 。钇铝石榴石的化学式是Y3 Al5 O15 ,简
EBCCD在凝视测距成像激光雷达中的应用

第36卷,增刊红外与激光工程2007年6月、,b1.36Suppl enl e ntI nh砒d and Las er Engi nee r i ng J u n.2()07EB C C D在凝视测距成像激光雷达中的应用杨文进,杜小平,赵继广,曾朝阳,王俏(装备指挥技术学院研究生管理大队,北京101416)摘要:微光成像器件在微弱光信号下仍具有较高的探测能力和优良的成像质量。
介绍了EB ccD 在激光主动照明测距成像中的新用途。
介绍了基于FM/cw测距原理的凝视测距成像激光雷达的基本原理,和系统基本结构。
这种体制激光成像雷达要求微光探测器必须能够实现短波红外微光探测和自混频解调距离信息的双重功能。
在对自混频解调实现数学模型简单分析的基础上,讨论了通过调制微光探测器响应度,实现外差混频解调的方法。
关键词:凝视激光成像雷达;FM/cw;微光成像器件;E B C C D;自混频中图分类号:TN958;TN206文献标识码:A文章编号:1007.2276(2007)增(器件)一0242.04A ppl i c at i on of EBC CD i n t he s t ar i ng r ange i m agi ng l as er r adarY A N G W色n-j i n,D U)(i a0一pi ng,Z H A O儿gua ng,Z E N G zl l ao—y锄g,W A N G Q i a o(Com pan y of Po s t gl硼uate M锄ag em e nt,A cad em y of Equi pn圮nt coⅡⅡn觚d&1kt l no l o秭B刨i ng101416,china)A b s t r ac t:EBC CD ha V e per fe ct de慨t i ng abi nt y and i m a gi ng qual i t)r i Il10w1eV el l i g ht condi t i ons.Anew哪l l i cat i on of髓C C D i n t t le a ct i V e l as er i11um i nat i on r ange i I I l a gi ng i s i n们duced.,nlef r equency—m odulat i o“cont inuous w aV e r angi ng t l l eor y and t he1as er r ad ar ar cI l i t ec t ur e a r e pres e nt e d.Tl l i s哆pe of r ad ar r equi r es t he det ec t or t o pos s es s t he f u nct i o n of shor t w aV e i nfr a red det e ct i on as w eU as m e s el f二m i xi ng dem odul撕on t o e x t r ac t r ange i nfom at i on.on t he pres ent of t l le m at hem a t i cal m odel of s el f-m i xi ng,t he s el f—I Il i xi ngdem o血l at i on by m odul at i ng m e r espons i bi H t y of t he l ow—l i ght l e V e l de眦t ori s di scuss ed.K e y w ords:St a血g i m a gi ng l a se r r adar;FM,C W;Low—l evel—i I I l agi ng deV i c e;E B C C D;Sel f二l I l i xi ngO引言微光成像器件(EB ccD)是在像增强器中,用对电子灵敏的背照式电荷耦合器件(B CC D)代替了通常的荧光屏,从而将象增强器和C C D集成。
激光雷达论文

星载激光雷达的应用姓名学号学院北京市海淀区学院路37号北京航空航天大学100191*E-mail:摘要激光雷达在现代社会上多个领域都有着广泛的应用,星载激光雷达便是其中之一。
星载激光雷达在航天领域中有着广泛的应用。
本文简单介绍了激光雷达的发展与原理,星载激光雷达在各个领域中的广泛应用,及我国星载激光雷达技术的发展现状和必要性。
关键词星载激光雷达领域应用激光雷达技术是一门新兴技术,在地球科学领域及行星科学领域有着广泛应用。
随着这一技术在相关行业的深入开展,它越来越被世界各国的人们所熟知,并被大力推广、研发和应用,成为当今较为热门的现代量测技术。
激光雷达技术按不同的载体可分为星载、机载、车载及固定式激光雷达系统。
其中星载及机载激光雷达系统结合卫星定位、惯性导航、摄影及遥感技术,可进行大范围数字地表模型数据的获取;车载系统可用于道路,桥梁,隧道及大型建筑物表面三维数据的获取;固定式激光雷达系统常用于小范围区域精确扫描测量及三维模型数据的获取。
总之,激光雷达技术的出现,为空间信息的获取提供了全新的技术手段,使得空间信息获取的自动化程度更高,效率更明显。
这一技术的发展也给传统测量技术带来革命性的挑战。
1 激光雷达技术的发展历程国外激光雷达技术的研发起步较早,早在20世纪60年代年代,人们就开始进行激光测距试验;70年代美国的阿波罗登月计划中就应用了激光测高技术;80年代,激光雷达技术得到了迅速发展,研制出了精度可靠的激光雷达测量传感器,利用它可获取星球表面高分辨率的地理信息。
到了21世纪,针对激光雷达技术的研究及科研成果层出不穷,极大地推动了激光雷达技术的发展,随着扫描,摄影、卫星定位及惯性导航系统的集成,利用不同的载体及多传感器的融合,直接获取星球表面三维点云数据,从而获得数字表面模型DSM,数字高程模型DEM,数字正射影像DOM及数字线画图DLG等,实现了激光雷达三维影像数据获得技术的突破。
使得雷达技术得到了空前发展。
机载激光雷达测深技术及应用

机载激光雷达测深技术及应用海底地形是海洋基础测绘要获取的重要地理空间信息之一,在国民经济建设、海洋权益维护、国防建设和科学研究中具有重要的作用。
人们通过对声、光、电、磁长期的研究后发现,声波在海水中具有光、电、磁无法比拟的优越性。
迄今为止,人们所熟知的水中的各种能量辐射形式中,以声波的传播性能为最好。
正是由于声波在海水中衰减小、传播距离长,因而最适合于水深测量。
因此,基于声波的回声测深技术是应用最广最为成熟的水深测量技术,其中最为典型的测深设备是单波束测深仪和多波束测深系统。
尤其是多波束测深系统以其高效率全覆盖的优势在水深测量中得到了越来越普遍的应用。
一般而言,多波束测深系统的波束在海底的覆盖宽度是水深的 3 ~7 倍,个别系统最大可达10 倍。
然而,即使是多波束测深系统具有如此之宽的覆盖测幅,在浅水区的全覆盖测量效率也是非常低的。
自从人们发现光波在海水中的最佳透光窗口后,机载激光测深技术得到了迅速的发展。
美国、俄罗斯、澳大利亚、加拿大、瑞典、中国等都先后对机载激光测深技术进行了研究。
其中最为成熟的机载激光测深系统是加拿大的 SHOALS 系列产品(现已升级为CZMIL) 和瑞典的 HAWKEYE 系列产品。
机载激光测深技术是集激光、全球定位与导航、自动控制、航空、计算机等前沿技术,以直升机和固定翼飞机为平台,从空中向海面发射激光束来测量水深的海洋高新技术,属于主动测深系统,在浅于 50m 的沿岸水域,具有无可比拟的优越性。
特别是能够高效快速测量浅海、岛礁、暗礁及船只无法安全到达的水域。
其主要优点如下:( 1) 覆盖宽度不受水深的影响,而仅仅与飞机航高和激光测深系统的宽高比有关,这一显著特点是多波束测深系统所不具备的;( 2) 飞机速度远远快于船速,因此,机载激光测深系统具有很好的机动性和非常高的测深效率;( 3) 机载激光测深系统目前已具有水部和陆部同时测量的功能,即在岸线附近,测量水深的同时,还可以测量岸线附近的地形。
《基于CCD的钢板测宽仪系统设计》范文
《基于CCD的钢板测宽仪系统设计》篇一一、引言随着工业自动化程度的不断提高,钢板测宽仪作为钢铁生产线上重要的质量检测设备,其准确性和效率直接影响到产品的质量与生产效率。
传统的钢板测宽仪由于技术限制,往往存在测量精度不高、响应速度慢等问题。
因此,本文提出了一种基于CCD (电荷耦合器件)的钢板测宽仪系统设计,旨在提高测量精度和响应速度,满足现代工业生产的需求。
二、系统设计概述本系统设计主要采用CCD作为图像传感器,通过捕获钢板表面的图像信息,实现宽度的精确测量。
系统主要由光源、CCD摄像头、图像处理单元、控制单元和显示单元等部分组成。
其中,CCD摄像头负责捕捉钢板表面的图像,图像处理单元对捕获的图像进行处理和分析,控制单元负责整个系统的控制和协调,显示单元则用于显示测量结果。
三、硬件设计1. 光源设计:为保证图像的清晰度和对比度,本系统采用高亮度、高稳定性的LED光源,并配备光路调节装置,以适应不同环境和钢板表面的反射特性。
2. CCD摄像头:选用高分辨率、低噪声的CCD摄像头,以捕捉更清晰的钢板表面图像。
同时,摄像头需具备自动对焦功能,以适应不同厚度的钢板。
3. 图像处理单元:采用高性能的图像处理器,对CCD摄像头捕获的图像进行处理和分析。
处理器应具备强大的计算能力和高速的数据处理速度,以满足实时测量的需求。
4. 控制单元:控制单元采用高性能的单片机或DSP(数字信号处理器)作为核心控制器,负责整个系统的控制和协调。
控制器应具备高速的数据处理能力和稳定的控制性能。
5. 显示单元:显示单元采用液晶显示屏或LED显示屏等设备,用于显示测量结果和系统状态信息。
四、软件设计软件设计是本系统的关键部分,主要包括图像处理算法和控制算法的设计。
1. 图像处理算法:图像处理算法是本系统的核心部分,主要包括图像预处理、边缘检测、宽度计算等步骤。
预处理包括去噪、增强等操作,以提高图像的质量。
边缘检测则通过分析图像中的边缘信息,确定钢板的边界位置。
TDI CCD在面阵成像三维激光雷达中的应用

收 稿 日期 : 0 0—1 2 21 1— 9
基 金 项 目 : 家 部 委 基 金 资 助 项 目( 0 0 0 P0 D 0 4 ) 国 G 2 14 J9 Z 2 6 作者简介 : 郑秋 贞 (9 5一) 女 ,湖南邵 阳人 , 18 , 硕士生 , 主要从事光通信 、 激光雷 达三维成像系统研究
标 的距离 ; 间接 测距 型 , 用一 个二 维 面 阵探测 器 接 收反 射 激 光信 号 得 到 强度 图 , 将 强 度 图解 调 获 得 目 ② 利 再 标 的距离 信 息 。直接 测距 型 面 阵激光 雷 达 , 由于 受工 艺 的研 制 , 在成 像 像 素 不 高 , 场 角不 大 等 缺 点 。间 存 视
接测 距最 有代 表 的 是丹 麦 Jn uc e sB sk等 人 提 出 的时 间切 片 法 和 2 0 0 7年法 德圣 路 易 士研 究 院 L uez 等人 a rni s 提 出的距 离 映射选 通 法 。在 国 内 ,0 8年 浙 江大 学提 出 了与 脉 冲无 关 的基 于双 通 道增 益 调 制测 距 原 理 。本 20
恒 定 增益 像 增 强 器
TD I CC D
线性 变化 像 增 强器
TD I CD C
设 通道 1和通道 2的增 益 函数分 别 为 :
信号处理
卜 ——_ 显 示 _ 叫
图 1 双 通 道 增 益 调 制 测 距 原 理 图
y ,
R
F g 1 T e d a r m fd a —c a n lg i i. h i g a o u l h n e a n
第 1 第 2期 2卷
激光雷达测绘项目简介范文

激光雷达测绘项目简介范文激光雷达测绘项目是一项基于激光雷达技术的测绘工程项目,通过运用激光雷达设备对目标区域进行高精度快速扫描,获取各类地形、建筑物和道路等地物的三维坐标数据,实现对目标区域的准确测绘和建模。
该项目的具体流程一般包括以下几个步骤:首先,确定测绘范围和目标区域,并制定测绘计划。
根据项目要求和实际情况,确定测绘的区域范围和测绘的目标对象,例如建筑物、道路或地形等。
其次,准备激光雷达设备和相关配套设备。
激光雷达设备是实现测绘工作的核心设备,可以通过高频率的激光脉冲扫描目标区域,获取地物的三维坐标数据。
此外,还需要配备GPS定位系统和高精度惯性导航系统等设备,以确定激光雷达设备在空间中的位置和姿态。
然后,进行实地测量。
根据测绘计划,将激光雷达设备和相关配套设备安装在测量车辆或机器人上,然后通过设备的扫描和测量功能,在目标区域内进行高频率的激光扫描,实时获取地物的三维坐标数据。
接下来,对采集到的数据进行预处理。
由于激光雷达采集到的数据量很大,需要对其进行去噪、滤波和配准等预处理操作,以提高数据的质量和可用性。
最后,进行数据分析和建模。
通过对预处理后的数据进行分析和处理,可以提取出目标区域内各种地物的特征信息,如建筑物的边界、地形的高程等。
根据这些特征信息,可以生成目标区域的三维模型或数字地图,为后续的工程设计和规划提供参考依据。
激光雷达测绘项目具有测绘精度高、速度快、操作简单等优点,适用于各种复杂地形和环境下的测绘需求。
在城市规划、交通规划、环境监测和灾害预警等领域具有广泛的应用前景。
通过激光雷达测绘项目,可以为社会发展和城市规划提供科学依据,促进社会经济的可持续发展。
基于线阵CCD的激光三角测距传感器数据处理算法的研究
ABSTRACT
As a new non-contacted displacement sensor, Laser displacement sensor based on triangulation has many excellent advantages such as being simple structure, highspeed measurement and high precision, small test spot, good anti-jamming ability, non-contact measurement, so laser displacement sensor based on triangulation is of great value and enjoys broad application prospects in industry-manufacture field such as machine vision, auto-machining, online measurement, practicality profile modeling biomedicine .However, currently there is still no this kind of laser product for measurement in China, the domestic market is totally occupied by foreign products and the price of this kind of product from foreign countries. Therefore, the work to develop the laser displacement measure instrument with stronger capability and lower price has high application value. This paper is based on the principle of the triangular measurement and adopts the semiconductor laser as the setup and measurement system for the lamp-house. It makes a detailed analysis for choosing every part of the measurement system, works out a method to enhance the resolution of the measurement under the premise that a relatively long measure distance is assured. Moreover, this paper also analyzes various elements which result in the measurement errors through theories and experiments and some methods to eliminate and reduce these elements are provided as well. The main tasks for this paper are as follows: 1. Analyze the characteristics of every part which forms the whole system; find the affects these parts have on the whole measurement system and on the measurement precision in particular. 2. Use average filter and the improved middle filter to treat the original images collected by CDD in order to gain more stable signals; analyze how to enhance the
扫描成像跟踪激光雷达

扫描成像跟踪激光雷达屈恒阔;张清源;阮友田【摘要】设计了一种基于激光图像跟踪的激光雷达系统来实现目标的跟踪测量。
该系统通过激光光束二维扫描,形成包含距离和角度信息的三维图像,由测量视场内运动目标的几何中心与视场中心的角度偏差获得脱靶量,利用脱靶量驱动伺服机构使目标几何中心处于雷达扫描视场中心,从而实现目标的实时跟踪,并输出目标距离和角度信息。
实测结果表明:采用设计的激光雷达系统对距离900 m的目标进行测量,测距精度优于0.25 m,角跟踪精度优于0.07°,角跟踪能力优于1.2(°)/s,实现了快速捕获目标、高精度跟踪测量和系统小型化等既定目标。
%In order to realize tracking and measurement for targets,a laser radar system based on image tracking is designed.The system produces a three dimension image with distance and angle information by a two dimension mechanically scanning of laser beam.It uses the miss distance,difference of azimuth and the pitch between the center of moving target and the field of view of scanning to drive the servo mechanism to keep the target in the center of sight to track the target in real time.At the same time,the valuable information of distance and angle is exported.Through a series of experiments on the system,it shows that for the target at the distance of 900 m,the accuracies of distance measuring and angle tracking are better than 0.25 m and 0.07°,respectively,and the ability of tracking is better than 1.2(°)/s.The system achieves the system miniaturization,fast acquisition targets,high accuracy measurement and tracking.【期刊名称】《中国光学》【年(卷),期】2012(005)003【总页数】6页(P242-247)【关键词】激光雷达;扫描成像;自主跟踪;图像处理【作者】屈恒阔;张清源;阮友田【作者单位】中国电子科技集团公司第二十七研究所,河南郑州450047;中国电子科技集团公司第二十七研究所,河南郑州450047;中国电子科技集团公司第二十七研究所,河南郑州450047【正文语种】中文【中图分类】TN958.981 引言激光雷达从功能上可分为激光测角和跟踪激光雷达、扫描成像跟踪激光雷达。
基于激光雷达原理的三维扫描系统

基于激光雷达的三维扫描系统摘要基于激光雷达原理的三维扫描系统,是以一种基于结构光扫描原理的激光雷达为基础,通过使线激光器发出的线激光在被扫描物体表面扫描,摄像头便可接收到物体上不同位置的线激光的照片。
然后提取出成像照片中物体上的线激光每一点的二维坐标吗,由已知量利用三角法可得到线激光中一点到摄像头的距离,由此距离值便可将线激光中这点的位置表达在根据摄像头位置建立的世界坐标系中。
每一次扫描可得到一条线激光上若干点的空间位置信息,整个扫描过程结束就可以得到被扫描物体若干点的空间位置信息,根据这些点的位置信息可还原出被扫描物体的三维形状。
本系统中以STM32单片机作为下位机控制激光扫描提前照片中激光线的坐标,并将当前提取的激光线在照片中的坐标通过串口传入上位机MATLAB 程序。
上位机接收到激光坐标数据后进行三维还原运算,计算出每一个激光点对应空间中的三维坐标,之后进行三维作图,还原出物体的三维形状。
关键词:激光扫描;三角法;三维成像一、作品仓^意 (1)二、方案论证与设计 (1)三、原理分析与硬件电路图 (2)1•几何建模与算法分析 (2)2•硬件电路设计原理及分析 (6)四、软件设计与流程 (7)五、系统测试 (8)六、作品难点与创新 (10)七、总结 (11)参考文献: (12)一、作品创意激光雷达在机器人自主导航和三维测量领域具有广泛的应用。
特别是在机器人导航,激光雷达可以说是一双机器人的眼睛,没有它机器人就成了瞎子,如果要实现机器人自主导航,激光雷达是必不可少的。
导航中使用的激光雷达用于对周围环境成像从而选择路径以及避开障碍。
这就需要激光雷达对周围物体成三维立体影像,从而获取周围物体的距离位置信息。
由于在机器人导航领域,对于雷达的体积和质量的要求较高,所以目前在导航领域用的激光雷达主要采用的光脉冲往返时间测量和连续光的相位差测量方式。
虽然在性能上已经满足要求,但是这样的设计方案对硬件要求很高,从而硬件成本很高,很难普及到工业与民用机器人平台。
基于CCD的新型电视测角仪设计
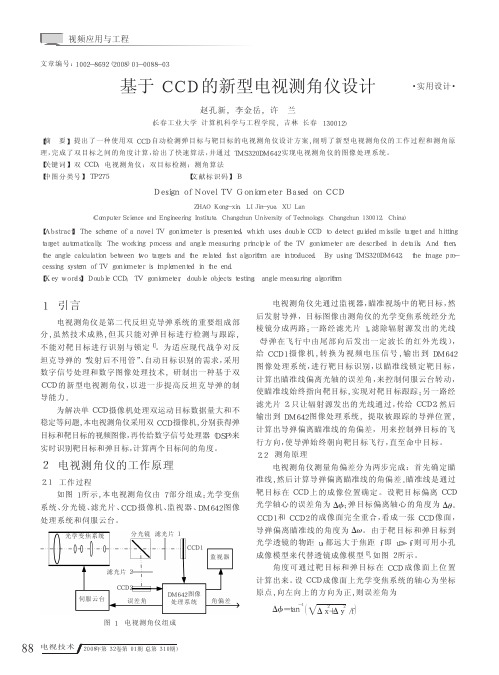
准线, 然后计算导弹偏离瞄准线的角偏差。瞄准线是通过
靶目标在 CCD 上的成像位置确定。设靶目标偏离 CCD
光学轴心的误差角为 !!; 弹目标偏离轴心的角度为 !"。
CCD1 和 CCD2 的成像面完全重合, 看成一张 CCD 像面,
导弹偏离瞄准线的角度为 !#。由于靶目标和弹目标到
光学透镜的物距 u, 都远大于焦距 f, 即 u!f, 则可用小孔
20071119图4基于rf5电视测角仪的软件结构图5角偏差曲线a静止靶目标的角偏差302826242220181614时间s121086420420246810角度12b运动靶目标的角偏差302826242220181614时间s1210864204202468角度12图6输出图像b动目标图像a静目标图像上接第46页4小结采用智能天线技术后系统能在几毫秒时间内在干扰方向上形成方向图零点从而有效抑制脉冲干扰对信号接收的影响极大地提高了信号的接收性能
成像模型来代替透镜成像模型[2], 如图 2 所示。
角度可通过靶目标和弹目标 在 CCD 成 像 面 上 位 置
计算出来。设 CCD 成像面上光学变焦系统的轴心为坐标
原点, 向左向上的方向为正, 则误差角为
# $ - 1
!!=tan
"!x2+!y2 /f
88 电视技术 2008年第 32 卷第 01 期(总第 310 期)
4 DM642 图像处理系统软件设计
本 系 统 采 用 TI 公 司 的 RF5 多 任 务 参 考 框 架 设 计 。 整 个 DSP 系 统 由 4 个 线 程 组 成 : TSK_input 线 程 从 视 频 输入端口读数据, 完成对图像预处理; TSK_output 线程向 视频输入端口写数据, 完成视频图像输出; TSK_process 线程提取所需的角度信号, 完成视频图像融合; TSK_con- trol 线程用于控制两路视频分别输入和处理, 和其间的 数据之间的融合。前三者之间靠 SCOM 消息队列进行同 步 和 消 息 传 递 ; TSK_control 线 程 与 TSK_process 线 程 之 间通过消息邮箱完成消息传递。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
25 500A/D conveFra bibliotekter/bits
16
Binning modes
1×1,2×2,3×3
Cooling
Single TE,Active fan,~35℃ Delt
Temperature regulation/℃
Closed loop ,±0.1
Wide-angle lens
Walmexpro f/2.8
图 1 侧向散射激光雷达原理示意图 Fig.1 Diagram of side-scatter lidar
表 1 侧向散射激光雷达系统主要技术参数 Tab.1 Specifications of side-scatter lidar system
Laser
(Quantel brilliant b)Nd:YAG
18.00×14.00
Pixels Pixel size/μm2 Read noise/counts·pixel-1 Dark / electrons·s -1·pixel -1
3 352×2 532 5.4×5.4 ~10
<0.5e at 0℃
Full well capacity/electrons
摘 要: 后向散射激光雷达技术已广泛应用于大气气溶胶的探测,但由于有盲区和过渡区,限制了它 在近距离段的探测范围和精度。侧向散射激光雷达技术没有后向散射激光雷达技术中的上述缺陷,可 实现近距离段气溶胶信号的连续探测,且探测精度较高。 开发研制了基于 CCD 的侧向散射激光雷达 系统,它由激光发射、光学接收、几何定标及数据采集等子系统组成。 与后向散射激光雷达的对比探 测个例表明,该激光雷达系统数据可靠,近距离的有效探测范围为 0.02~4 km。 这一系统的建立为进 一步深入研究近地面层的气溶胶时、空分布奠定了坚实的基础。 关 键 词 : 大气光学; 侧向散射激光雷达; CCD 中 图 分 类 号 : TN958.98; P407.5 文 献 标 志 码 : A 文 章 编 号 : 1007-2276(2014)10-3282-05
CCD 有 效 光 学 接 收 面 积 ;D 为 CCD 相 机 到 激 光 光 束
的 垂 直 距 离 ;βa(z,θ)、βm(z,θ) 分 别 为 距 离 z 处 、 散 射 角为 θ 方向上气溶胶和大气分子的侧向散射系数;
αa(z),αm(z) 分 别 为 距 离 z 处 气 溶 胶 和 大 气 分 子 的 消
随着科学技术的进步,激光雷达技术已广泛、深 入 地 应 用 到 大 气 气 溶 胶 时 间 和 空 间 分 布 探 测 中 [2-4]。 目前常用的激光雷达为后向散射激光雷达, 这种激 光雷达在近距离段存在一个盲 区和过渡区[5]。 盲区和 过渡区的距离与发射光轴和望远镜光轴的间距、激 光光束发散角、望远镜的视场角等因素有关,可从几 百米到超过一千米的范围。 过渡区内的激光雷达信 号受几何因子的影响, 限制了后向散射激光雷达在 近距离场合下的探测精度。 在环境监测中,人们最关 心的就是近地面层内的气溶胶空间分布情况, 这是 后向散射激光雷达技术的不足之处。
侧向散射激光雷达技术是近年来正在研究的新 技 术 [6-7], 它 将 发 射 装 置 与 接 收 装 置 分 两 处 放 置 , 这 样就不存在后向散射激光雷达中几何因子的影响, 极大地提高了近距离段的探测精度; 由于探测的是 侧向散射光,由几何关系可知,近距离段空间分辨率 也很高, 这两个优点使得侧向激光雷达适合探测近 地层的大气气溶胶。
文 中 给 出 了 基 于 CCD 的 侧 向 散 射 激 光 雷 达 系 统 的 原 理 图 和 主 要 技 术 参 数 , CCD 像 元 角 宽 度 分 布 曲线,大气侧向散射回波信号等;介绍了侧向散射激 光 雷 达 系 统 包 括 硬 件 和 CCD 像 元 角 宽 度 探 测 及 检 验;并介绍了探测个例及结果分析。
Wavelength/nm
532
Pulse energy/mJ
260
Repetition rate/Hz
10
Divergence/mrad
0.5
Detector
(SBIG) ST-8300M
3284
红外与激光工程
第 43 卷
续表 1
Laser
(Quantel brilliant b)Nd:YAG
Active area/mm
侧向散射激光雷达系统由激光发射、 光学接 收、几何定标及数据采集等子系统组成。 激光发射 子 系 统 主 要 是 Nd :YAG 脉 冲 激 光 器 , 主 要 指 标 : 波 长 532 nm,重 复 频 率 10 Hz,发 散 角 0.5 mrad。 光 学 接 收 子 系 统 为 一 部 天 文 CCD 相 机 , 其 像 素 大 小 为 3 352×2 532, 曝 光 时 间 可 根 据 需 要 设 定 , CCD 前 加 装 了 一 块 中 心 波 长 为 532 nm 的 干 涉 滤 光 片 , 以 提 高 探测信号的信噪比。 利用几何标定子系统,计算激光 光 束 上 各 散 射 点 与 CCD 相 机 中 像 元 之 间 的 对 应 关 系 。 计 算 机 采 集 CCD 成 像 的 回 波 信 号 强 度 。 图 1 为 侧向散射激光雷达的组成示意图。 图中 z 为探测距 离 ,D 为 CCD 相 机 到 激 光 光 束 的 垂 直 距 离 ,dθ 为 像 元对应的张角。 表 1 为该雷达系统的主要技术参数。
Chinese Academy of Sciences, Hefei 230031, China)
Abstract: The backscatter lidar technique is widely applied to atmospheric aerosol detection, but the blind and transition regions restrict its detecting range and precision in near distance. Side-scatter lidar technique without above shortage can detect aerosol continuously in near distance, and has good precision. A side-scatter lidar system was developed, which is composed of transmitter, receiver, geometric calibration, and data acquisition subsystems. Comparison experiment with backscatter lidar indicates that the data acquired from this lidar are reliable and the near detection effective range is from 0.02 -4 km. This system can be used for study the spatio-temporal distribution of atmospheric aerosol in near surface further. Key words: atmospheric optics; side-scatter lidar; CCD
1系统
当激光束入射到大气中, 就要和大气中的散射 粒子(主要是大气分子、气溶胶)发生相互作用,从而 产生向各个方向的散射光。 散射光中包含了散射粒 子 的 信 息 ,侧 向 散 射 激 光 雷 达 借 助 CCD 探 测 激 光 束 上不同距离、不同方向上的散射光光强,通过侧向散 射激光雷达方程来反演散射粒子的光学参量。 1.1 系统装置
第 10 期
陶 宗 明 等:基 于 CCD 的 侧 向 激 光 雷 达 系 统 研 制 及 探 测 个 例
3283
0引言
气溶胶是指悬浮在大气中固体和液体微粒共 同组成的多相体系,微粒的直径跨度较大,一般为 0. 001 ~ 100 μm , 不 同 种 类 的 气 溶 胶 存 在 时 间 不 等 , 短则几秒,长则几年,化学成份更是复杂。 气溶胶 主要分布在对流层内, 在人类活动的近地面内含 量最大。 气溶胶对全球气候及人类生存环境都有 一 定 的 影 响 [1], 主 要 表 现 在 两 个 方 面 : 第 一 , 它 发 射来自太阳的短波辐射、 吸收来自地面的长波辐 射, 直接影响地球-大气系统的辐射收支平衡,同 时作为凝结核参与云的形成, 间接影响辐射收支 平衡; 第二, 它是大气中污染物和灰霾的主要成 分,是城市中光化学烟雾的重要组成。 故气溶胶是 当前大气科学领域中的热点问题之一, 是全球气 候变化最敏感的强迫因子, 同时也是政府制定减 排政策的重要科学依据。
Lens focal length/mm
14
CCD sensor
Kodak KAF-8300
Quantum efficiency at 532 nm
~55%
Interference filter
Semrock corporation
Bandwidth/nm
25.6
Peak transmittance
Development and case study of side-scatter lidar system based on charge-coupled device
Tao Zongming1,2, Liu Dong2, Ma Xiaomin1, Chen Xiangchun1, Wang Zhenzhu2, Xie Chenbo2, Wang Yingjian2
αm(z′)]·dz′+
[αa(z′)+αm(z′)]·dz′}dθ (1)
0