《机械动力学答案》
机械动力学第四章作业(答案)
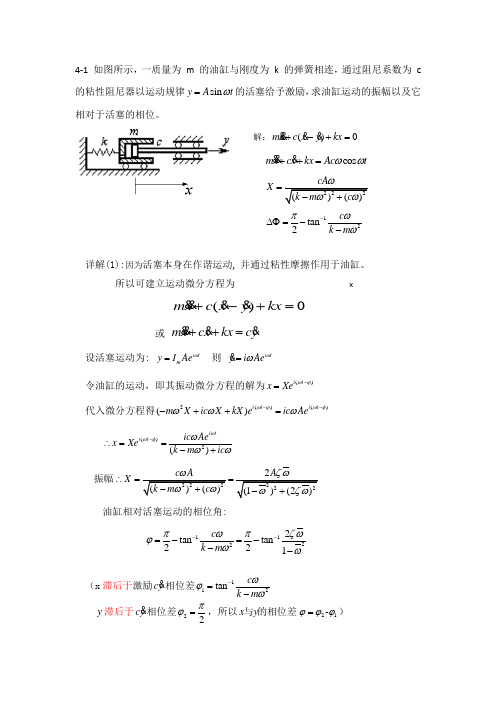
4-1 如图所示,一质量为 m 的油缸与刚度为 k 的弹簧相连,通过阻尼系数为 c 的粘性阻尼器以运动规律sin y A t ω=的活塞给予激励,求油缸运动的振幅以及它相对于活塞的相位。
解:()0mx c x y kx +-+=&&&&cos mx cx kx Ac t ωω++=&&& 222()()X k m c ωω=-+12tan 2c k m πωω-∆Φ=--详解(1):因为活塞本身在作谐运动, 并通过粘性摩擦作用于油缸。
所以可建立运动微分方程为 x()0mx c x y kx +-+=&&&&或mx cx kx cy ++=&&&&设活塞运动为: i t m y I Ae ω= 则 i t yi Ae ωω=& 令油缸的运动,即其振动微分方程的解为()i t x Xe ωϕ-= 代入微分方程得2()()()i t i t m X ic X kX e ic Ae ωϕωφωωω---++=()2()i ti t ic Ae x Xek m ic ωωφωωω-∴==-+222222()()(1)(2)X k m c ζωωωωζω∴==-+-+振幅油缸相对活塞运动的相位角:11222tan tan 221c k m πωπζωϕωω--=-=---(x 滞后于激励cy &相位差112tan c k m ωϕω-=-y 滞后于cy&相位差22πϕ=,所以x y 与的相位差21-ϕϕϕ=)解法(2): 矢量法2222()()()kX m X c X c A ωωω-+=222()()X k m c ωω∴=-+振幅及 ()i t x Xe ωϕ+=11222tan tan 221c k m πωπζωϕωω--=-=---4-2 试导出图所示系统的振动微分方程,并求系统的稳态响应。
机械动力学基础考试题答案

7、F0、 、m、c、k为已知实数且都不等于0的条件下,t为时间变量,运动微分方程 中的响应为单自由度有阻尼系统的自由振动。(错)
8、多自由度线性系统的固有振型之间一定存在着关于质量矩阵、阻尼矩阵、刚度矩阵的正交性。(错)
主要特性参数有:质量、刚度、阻尼。
(2)机械振动学研究的主要内容是什么?
主要研究外界激励(输入)、振动系统、响应(输出)三者之间的关系。
(3)试用数值说明阻尼对该振动系统的影响。
解:一方面使系统振动的周期略有增大,频率略有降低,即
另一方面使系统振动的振幅按几何级数衰减。
(4)什么是共振?在工程实际中机械系统共振时的突出表现是什么?
一、判断题
1、通常来说,线性振动系统的自由度数和固有频率数是相等的。(对)
2、振动系统的质量矩阵、阻尼矩阵、刚度矩阵与选取的广义坐标无关。(错)
3、单自由度弹簧振子在光滑水平面和铅垂平面做自由振动时,振动周期不相等。(错)
4、小阻尼单自由度系统的自由振动称为衰减振动。(对)
5、加大阻尼一定可以有效隔振ቤተ መጻሕፍቲ ባይዱ(错)
9、无阻尼振动系统的固有频率与系统的质量、弹簧刚度和所受外激励有关。(错)
10、对于能量无耗散的单自由度线性振动系统,在自由振动时系统的机械能守恒,采用能量法可直接得出系统的固有频率与运动微分方程。(对)
二、简答题
(1)简述机械振动的概念,并列出振动系统的主要特性参数有哪些?
所谓机械振动,是指物体(或物体系)在平衡位置(或平均位置)附近作来回往复的运动。
答:通常把激励频率与系统固有频率相等时称为共振。
机械振动系统的振幅显著增大。
2012年机械动力学基础考试题答案
一、填空题(10分,每空2分)(1)、平衡位置(2)、非线性振动,非周期振动,连续系统(3)、质量、弹簧、阻尼(4)、线性(5)、质量,弹簧刚度二、判断题(10分,每题2分)(1)、√(2)、√(3)、×(4)、√(5)、×三、简答题(20分,每题5分)(1)、如何通过测量弹簧-质量系统的静变形求出系统的固有频率?解:根据弹簧的静变形s δ和质量块的重力mg 相等,即mg k s=δ,确定sgm kδ=,代入固有频率公式,sn gm k δω==。
(2)、名词解释:静力耦合(弹性耦合),动力耦合(惯性耦合)。
解:振动微分方程通过刚度项来耦合,即刚度矩阵非对角元素非零,称为静力耦合或弹性耦合。
振动微分方程通过质量项来耦合,即质量矩阵非对角元素非零,称为动力耦合或惯性耦合(3)、在周期激励作用下,把几个谐响应的总和作为系统响应的理论基础上什么?解:叠加原理,即周期激励的响应等于各谐波分量引起响应的总和。
(4)、分别举例说明振动的危害和益处。
本题属于开放题。
四、计算题(15分)某仪表模型如下图所示,刚性杆AO (质量可忽略)绕O 点转动,杆长5=L cm 。
在A 点有一集中质量025.0=m kg ,拟在B 点加一阻尼系统,其刚度4=k KN/m 的弹簧和阻尼系数为c 的阻尼器,41=l cm 。
试求:系统经过2次循环后幅值减小40%,所需要的阻尼系数,且当OA 杆初始偏角为 5,初始角速度为零,求系统做自由振动方程。
A解:(1)设刚杆在振动时的摆角为θ,由刚杆的振动微分方程可建立系统的振动微分方程:θθθ21212kl cl mL --= 0221221=++θθθmLkl mL cl (1) 系统的无阻尼固有频率:rad/s 320=1mkL l n =ω 由3540%-1131==A A 可得对数减幅系数: 2554.035ln 21ln2131===A A δ于是相对阻尼系数为0406.0)2(22=+=δπδζ根据方程(1)得:2212mL cl n =ζω由此得到阻尼系数Ns/m 1.015=1625025.03200406.022212=⨯⨯⨯⨯==l mL c n ζω(2)有阻尼系统固有频率为rad/s 319.73612=-=n d ωζω1)设系统有阻尼自由振动方程的解为:)sin(ϕωθζω+=-t Ae d t n由初始角 50=θ,00=θ 得: 5.12020=⎪⎪⎭⎫ ⎝⎛++=d n A ωθζωθθ 度 rad 1.53 =度 87.67arctan 000=⎪⎪⎭⎫⎝⎛+=θζωθθωϕn d )53.1367.319sin(1.5992.12+=-t e t θ度2)或者 设系统有阻尼自由振动方程的解为:())sin()(cos 21t A t A e d d t nωωθζω+=-其中 rad 0.08721805501====πθ A rad 0.0035319.7360.08723200.04060002=⨯⨯+=+=d n A ωθζωθ于是,())319.736sin(0.0035)319.736(0.0872cos 992.12t t e t +=-θ rad五、计算题(20分)解:梁和弹簧并联,其等效刚度系数为则系统的固有频率为:本题所示系统为无阻尼单自由度系统,即:取静平衡位置为坐标原点,则系统的动力学方程为其中,由单自由度系统在任意激励下的响应公式可得系统在外加载荷作用下在竖直方向的响应为:当时当时当时当t>t3时综上,系统在外加载荷作用下在竖直方向的响应为其中,六、计算题(10分)坐标,,分别表示,,偏离其各自平衡位置的水平位移。
机械动力学复习题答案
机械动力学复习题答案机械动力学复习题答案机械动力学是研究物体运动和力的学科,是机械工程中非常重要的一门课程。
它涉及到力、质点运动、刚体运动、动力学方程等内容。
在学习机械动力学时,我们经常会遇到一些复习题,下面是一些常见机械动力学复习题的答案,希望能对大家的学习有所帮助。
1. 什么是力?答:力是物体之间相互作用的结果,是一种物理量,用符号F表示,单位是牛顿(N)。
力可以改变物体的运动状态,包括速度、方向和形状等。
2. 什么是质点运动?答:质点运动是指将物体看作一个质点,忽略物体的形状和大小,只考虑物体的质量和位置的运动。
质点运动可以分为直线运动和曲线运动两种。
3. 什么是刚体运动?答:刚体运动是指物体保持形状不变的运动。
在刚体运动中,刚体的各个部分保持相对位置不变,刚体的形状和大小也不发生变化。
4. 什么是动力学方程?答:动力学方程描述了物体运动的规律。
它是牛顿第二定律的数学表达式,可以用来计算物体的加速度、速度和位移等物理量。
动力学方程的一般形式为F=ma,其中F是物体所受的合力,m是物体的质量,a是物体的加速度。
5. 什么是动量?答:动量是物体运动的量度,是物体质量和速度的乘积。
动量用符号p表示,单位是千克·米/秒(kg·m/s)。
动量的大小和方向都与物体的质量和速度有关。
6. 什么是冲量?答:冲量是力对物体作用的时间积分,是力对物体产生变化的量度。
冲量用符号J表示,单位是牛顿·秒(N·s)。
冲量的大小等于力的大小乘以作用时间的长度。
7. 什么是动能?答:动能是物体由于运动而具有的能量,是物体的质量和速度的平方的乘积的一半。
动能用符号K表示,单位是焦耳(J)。
动能的大小与物体的质量和速度的平方成正比。
8. 什么是功?答:功是力对物体做的功,是力在物体上产生的能量转化。
功用符号W表示,单位是焦耳(J)。
功的大小等于力的大小乘以物体移动的距离。
9. 什么是机械能?答:机械能是物体的动能和势能的总和。
机械动力学基础课后答案
机械动力学基础课后答案一、填空题(每空1分,共30分)1、构件就是机器的_运动___单元体;零件就是机器的__生产___单元体;部件就是机器的__加装___单元体。
2、平面运动副可分为______低副__和____高副___,低副又可分为__转动副_____和___移动副____。
3、轮系运动时,所有齿轮几何轴线都固定不动的,表示___定轴轮系____轮系,至少存有一个齿轮几何轴线不紧固的,表示___行星轮系______轮系。
4、为保证带传动的工作能力,一般规定小带轮的包角α≥___120°_______。
5、若键的标记为键B20×70GB-79,则该键为__B____平键,b=___20___,L=_____70___。
6、轴的作用是_____支承轴上的旋转零件________________________。
按轴的承载情况不同,可以分为___传递运动和转矩____、___心轴_____、__转轴、传动轴_______。
7、凸轮机构就是由_____机架_______、________凸轮____、______从动件______三个基本构件共同组成的。
8、在曲柄摇杆机构中,当曲柄等速转动时,摇杆往复摆动的平均速度不同的'运动特性称为___急回特性_________。
9、在蜗轮齿数维持不变的情况下,蜗杆的头数越太少,则传动比就越_______小_____。
10、齿轮啮合时,当主动齿轮的____齿根__推动从动齿轮的___齿顶___,一对轮齿开始进入啮合,所以开始啮合点应为______从动轮齿顶圆______与啮合线的交点;当主动齿轮的___齿顶___推动从动齿轮的___齿根___,两轮齿即将脱离啮合,所以终止啮合点为________主动轮齿顶圆____与啮合线的交点。
11、滚动轴承内圈与轴颈的协调使用____基孔新制__制,外圈与轴承孔的协调使用基轴制 _______制。
机械动力学第二章作业(答案)
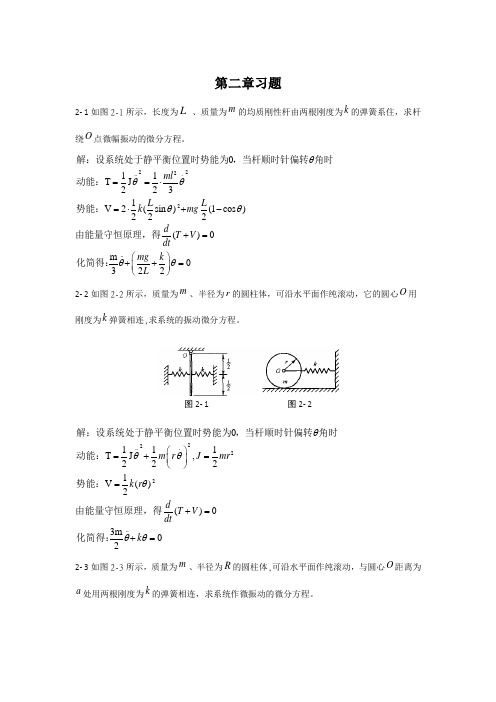
第二章习题2- 1如图2-1所示,长度为L 、质量为m 的均质刚性杆由两根刚度为k 的弹簧系住,求杆绕O 点微幅振动的微分方程。
222...2..011T J 2231V 2(sin )(1cos )222()0m 0322ml L Lk mg dT V dtmg k L θθθθθθθ==⋅=⋅+-+=⎛⎫++= ⎪⎝⎭解:设系统处于静平衡位置时势能为,当杆顺时针偏转角时动能:势能:由能量守恒原理,得化简得:2- 2如图2-2所示,质量为m 、半径为r 的圆柱体,可沿水平面作纯滚动,它的圆心O 用刚度为k 弹簧相连,求系统的振动微分方程。
22 (2)2..0111T J ,2221V ()2()03m 02m r J mr k r dT V dtk θθθθθθ⎛⎫=+= ⎪⎝⎭=+=+=解:设系统处于静平衡位置时势能为,当杆顺时针偏转角时动能:势能:由能量守恒原理,得化简得:2- 3如图2-3所示,质量为m 、半径为R 的圆柱体,可沿水平面作纯滚动,与圆心O 距离为a 处用两根刚度为k 的弹簧相连,求系统作微振动的微分方程。
图2- 1 图2- 22.222..220111T J ,2221V (2)[()]2()032()02m R J mR k R a dT V dt mR k R a θθθθθ⎛⎫=+= ⎪⎝⎭=⋅++=++=解:设系统处于静平衡位置时势能为动能:势能:由能量守恒原理,得化简得: 2- 4求图2-4所示弹簧-质量-滑轮系统的振动微分方程(假设滑轮与绳索间无滑动)。
2.222....0111T J ,2221V ()2()0()02m r J Mr k r dT V dt x r x r M m x kx θθθθθ⎛⎫=+= ⎪⎝⎭=⋅+===++=解:设系统处于静平衡位置时势能为动能:势能:由能量守恒原理,得其中,,化简得: 2- 5质量可忽略的刚性杆-质量-弹簧-阻尼器系统参数如图2-5所示,2L 杆处于铅垂位置时系统静平衡,求系统作微振动的微分方程。
《机械动力学答案》
A、急停阶段 B、启动阶段 C、稳定运转阶段 D、停车阶段 72、在动力分析中,主要涉及的力是( ) 。 A、驱动力 B、重力 C、摩擦力 D、生产阻力 73、以下选项中,与等效力有关的是( ) 。 A、外力 B、传动比 C、ωj/v D、vk/v 74、以下选项中,与等效力矩有关的是( ) 。 A、外力据 B、传动比 C、ωj/ω D、vk/ω 75、以下选项中,可归为阻尼的有( ) 。 A、物体的内力 B、物体表面间的摩擦力 C、周围介质的阻力 D、材料的内摩擦 四、填空题(每空 2 分,共 30 空,共 60 分) 76、从惯性载荷被平衡的程度看,平衡可分为 、 和 。 77、机械动力学的分析方法按功能分类可分为 和 。 78、动力学的分析方法按水平分类,可分为 、 、 和 。 79、用质量再分配实现摆动力的完全平衡,其分析方法主要有 、 、 和 。 80、机械系统运转的全过程可分为 、 和 这几个阶段。 81、机器人动力学是机器人 、 和 的基础。 82、工业机器人通常由 、 、 和 组成。 83、二自由度系统的等效转动惯量是系统的 、 、 和 的函数。 84、实现摆动力完全平衡的方法有 、 和 。 76、部分平衡、完全平衡、优化综合平衡 77、动力学反问题、动力学正问题 78、静力分析、动态静力分析、动态分析、弹性动态分析 79、广义质量代换法、线性独立矢量法、质量矩替代法、有限位置法 80、启动阶段、稳定运转阶段、停车阶段 81、操作机设计、控制器设计、动态性能分析 82、执行机构、驱动装置、控制系统、传感系统 83、时间、惯性参数、几何参数、广义坐标 84、加配重、合理布置机构、设置附加机构 五、计算题(第 85、86 题各 30 分,第 87 题 10 分,第 88 题 20 分,共 90 分) 85、如图所示为一对心曲柄滑块机构。曲柄以转速度 ω1 作等速回转运动,曲柄与水平方 向夹角为 θ1 ,曲柄长度为 r ,质心与其回转中心 A 重合。连杆长度 l ,连杆与水平方向夹 角为 θ 2 ,连杆质心 S2 到铰链 B 的距离 BS 2 = L ,连杆质量 m 2 ,对其质心的转动惯量 J 2 。 滑 块质量 m3 ,其质心与铰链 C 重合。1)画出曲柄、连杆和滑块的受力分析图;2)写出曲 柄、连杆和滑块的平衡方程。
机械动力学期末复习题及答案
机械动力学期末复习题及答案Standardization of sany group #QS8QHH-HHGX8Q8-GNHHJ8-HHMHGN#《机械动力学》期末复习题及答案1、判断1.机构平衡问题在本质上是一种以动态静力分析为基础的动力学综合,或动力学设计。
答案:正确2.优化平衡就是采用优化的方法获得一个绝对最佳解。
答案:错误3.惯性力的计算是建立在主动构件作理想运动的假定的基础上的。
答案:正确4.等效质量和等效转动惯量与机械驱动构件的真实速度无关。
答案:正确5.作用于等效构件上的等效力(或等效力矩)所作的功等于作用于系统上的外力所作的功。
答案:错误6.两点动代换后的系统与原有系统在静力学上是完全等效的。
答案:错误7.对于不存在多余约束和多个自由度的机构,动态静力分析是一个静定问题。
答案:错误8.摆动力的完全平衡常常会导致机械结构的简单化。
答案:错误9.机构摆动力完全平衡的条件是:机构运动时,其总质心作变速直线运动。
答案:错误10.等效质量和等效转动惯量与质量有关。
11.平衡是在运动设计完成之前的一种动力学设计。
答案:错误12.在动力分析中主要涉及的力是驱动力和生产阻力。
答案:正确13.当取直线运动的构件作为等效构件时,作用于系统上的全部外力折算到该构件上得到等效力。
答案:正确14.摆动力的平衡一定会导致机械结构的复杂化。
答案:错误15.机器人操作机是一个多自由度的闭环的空间机构。
答案:错误16.质量代换是将构件的质量用若干集中质量来代换,使这些代换质量与原有质量在运动学上等效答案:正确17.弹性动力分析考虑构件的弹性变形。
答案:正确18.机构摆动力矩完全平衡的条件为机构的质量矩为常数。
答案:错误19.拉格朗日方程是研究约束系统静力动力学问题的一个普遍的方法。
答案:正确20.在不含有变速比传动而仅含定速比传动的系统中,传动比为常数。
21.平衡分析着眼于全部消除或部分消除引起震动的激振力。
答案:正确22.通路定理是用来判断能否实现摆动力完全平衡的理论。
机器动力学试题答案
解:1、 S l cos v3 l sin 1
对全部高中资料试卷电气设备,在安装过程中以及安装结束后进行高中资料试卷调整试验;通电检查所有设备高中资料电试力卷保相护互装作置用调与试相技互术关,通系电1,力过根保管据护线生高0不产中仅工资2艺料22高试2可中卷以资配解料置决试技吊卷术顶要是层求指配,机置对组不电在规气进范设行高备继中进电资行保料空护试载高卷与中问带资题负料2荷试2,下卷而高总且中体可资配保料置障试时2卷,32调需3各控要类试在管验最路;大习对限题设度到备内位进来。行确在调保管整机路使组敷其高设在中过正资程常料1工试中况卷,下安要与全加过,强度并看工且25作尽52下可22都能护可地1关以缩于正小管常故路工障高作高中;中资对资料于料试继试卷电卷连保破接护坏管进范口行围处整,理核或高对者中定对资值某料,些试审异卷核常弯与高扁校中度对资固图料定纸试盒,卷位编工置写况.复进保杂行护设自层备动防与处腐装理跨置,接高尤地中其线资要弯料避曲试免半卷错径调误标试高方中等案资,,料要编试求5写、卷技重电保术要气护交设设装底备备置。4高调、动管中试电作线资高气,敷料中课并设3试资件且、技卷料中拒管术试试调绝路中验卷试动敷包方技作设含案术,技线以来术槽及避、系免管统不架启必等动要多方高项案中方;资式对料,整试为套卷解启突决动然高过停中程机语中。文高因电中此气资,课料电件试力中卷高管电中壁气资薄设料、备试接进卷口行保不调护严试装等工置问作调题并试,且技合进术理行,利过要用关求管运电线行力敷高保设中护技资装术料置。试做线卷到缆技准敷术确设指灵原导活则。。:对对在于于分调差线试动盒过保处程护,中装当高置不中高同资中电料资压试料回卷试路技卷交术调叉问试时题技,,术应作是采为指用调发金试电属人机隔员一板,变进需压行要器隔在组开事在处前发理掌生;握内同图部一纸故线资障槽料时内、,设需强备要电制进回造行路厂外须家部同出电时具源切高高断中中习资资题料料电试试源卷卷,试切线验除缆报从敷告而设与采完相用毕关高,技中要术资进资料行料试检,卷查并主和且要检了保测解护处现装理场置。设。备高中资料试卷布置情况与有关高中资料试卷电气系统接线等情况,然后根据规范与规程规定,制定设备调试高中资料试卷方案。
机械设计基础 第十四章 机械系统动力学 参考答案

第十四章 机械系统动力学14-11、在图14-19中,行星轮系各轮齿数为123z z z 、、,其质心与轮心重合,又齿轮1、2对质心12O O 、的转动惯量为12J J 、,系杆H 对的转动惯量为H J ,齿轮2的质量为2m ,现以齿轮1为等效构件,求该轮系的等效转动惯量J ν。
22222121221123231211321211322212311212213121313()()()()1()()()()()()()o H H H o H J J J J m z z z z z z z z z O O z z z z z z z O O J J J J m z z z z z z z z νννωωωωωωωωωωωωωνω=+++=-=+=+=+-=++++++解:14-12、机器主轴的角速度值1()rad ϖ从降到时2()rad ϖ,飞轮放出的功(m )W N ,求飞轮的转动惯量。
m axm in1222121()22F F W y M d J WJ ϕνϕϕωωωω==-=-⎰解:14-15、机器的一个稳定运动循环与主轴两转相对应,以曲柄和连杆所组成的转动副A 的中心为等效力的作用点,等效阻力变化曲线c A F S ν-如图14-22所示。
等效驱动力a F ν为常数,等效构件(曲柄)的平均角速度值25/m rad s ϖ=,3H 1232 1 H O 1O 2不均匀系数0.02δ=,曲柄长度0.5O A l m =,求装在主轴(曲柄轴)上的飞轮的转动惯量。
(a) W v 与时间关系图 (b )、能量指示图a 224()23015mW y=25N m 25 6.28250.02cva O A vc O A O A va F W W F l F l l F N M va N J kg mνν=∏⨯∏=∏+==∏==⨯ 解:稳定运动循环过程14-17、图14-24中各轮齿数为12213z z z z =、,,轮1为主动轮,在轮1上加力矩1M =常数。
《机械动力学》——期末复习题及答案-精选.pdf
23. 无论如何,等效力与机械驱动构件的真实速度无关。 答案 :正确
24. 综合平衡不仅考虑机构在机座上的平衡,同时也考虑运动副动压力的平衡和输入转矩的 平衡。 答案 :正确
25. 速度越快,系统的固有频率越大。 答案 :错误
26. 平衡的实质就是采用构件质量再分配等手段完全地或部分地消除惯性载荷。 答案 :正确 27. 优化综合平衡是一个多目标的优化问题,是一种部分平衡。 答案 :正确
9.机构摆动力完全平衡的条件是:机构运动时,其总质心作变速直线运动。 答案 :错误
10. 等效质量和等效转动惯量与质量有关。 答案 :错误 11. 平衡是在运动设计完成之前的一种动力学设计。 答案 :错误
12. 在动力分析中主要涉及的力是驱动力和生产阻力。 答案 :正确
13. 当取直线运动的构件作为等效构件时,作用于系统上的全部外力折算到该构件上得到等
C )。
5. 在含有连杆机构或凸轮机构等变速比传动的系统中,传动比仅与机构的( A.速度 B.角速度 C.加速度 D.位置 答案 : D
6. 在研究摆动力的平衡时,不涉及惯性力矩,可以采用(
)。
A.静代换
B.动代换
C.静力代换
D.摆动力代换 答案 : A
7. 以下几种方法中,不是机械刚体动力学研究的分析方法的是(
10. 描述等效构件运动的方程式形式有(
)。
A.能量形式
B.动量形式
C.加速度形式
D.平衡力形式 答案 : A
)有关。
11.动态静力分析应用于( )。 A.动力学正问题 B.运动学正问题 C.动力学反问题 D.运动学反问题 答案 :C
2022机械动力学试题答案
2022机械动力学试题答案一、判断题1.考虑效率时,等效力大小与效率值大小成反比。
2.某机械的广义坐标数为5,则该机械的广义力一定少于5个。
3.某机械系统自由度为4,那么其惯性系数J33一定不小于零。
4.定轴轮系在匀速转动时,等效力矩一定等于零。
5.在考虑弹性时,铰链四杆机构中单元杆的节点变形数一定等于系统的节点变形数。
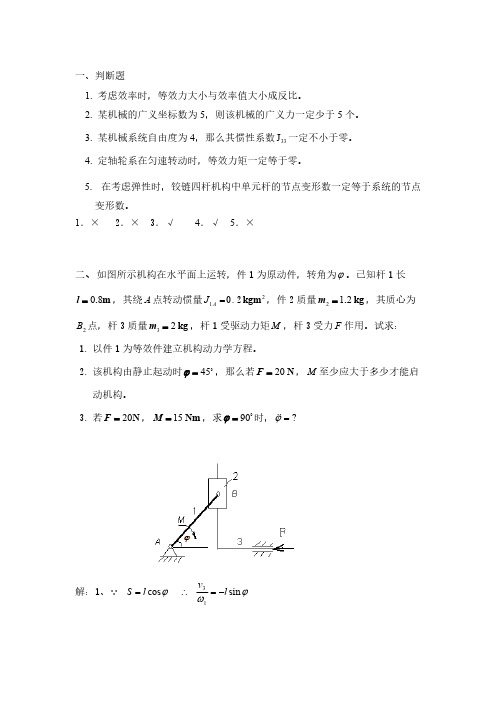
1.某2.某3.√4.√5.某二、如图所示机构在水平面上运转,件1为原动件,转角为已知杆1长l0.8m,其绕A点转动惯量J1A0.2kgm2,件2质量m21.2kg,其质心为B2点,杆3质量m32kg,杆1受驱动力矩M,杆3受力F作用。
试求:1.以件1为等效件建立机构动力学方程。
2.该机构由静止起动时45,那么若F20N,M至少应大于多少才能启动机构。
3.若F20N,M15Nm,求90时,解:1、Slcov31linMvMFv31MFlinv322mJmlmlin31A23122JvJ1AvB2m212dJv由MvJv2d得:MFlinJ1Am2l2m3lin2ml322inco2、M200.8in450M11.3Nm3、MFlinJ1Am2l2m3lin2ml322inco9.34rad2图示轮系中,轮4转角为4,系杆转角为H,各件转动惯量:J10.4kgm2,J21.8kgm2,J3J62.1kgm2,J4J50.6kgm2,JH0.5kgm2。
各轮齿数:z120,z260,z4z530,z3z660,各件所受力矩大小:MH30Nm,M120Nm,M430Nm,M640Nm,方向如图所示。
忽略各件质量及重力,现选定q1=H,q24,试求H。
解:iH1=1,iH2=0,i410,i421,i11533151,i12,i21,i22,i61,i6222224422222J11J1i11(J2J3J5)i21J6i61JHiH116.4kgm2222J22J1i12(J2J3J5)i22J6i62J4i423.15kgm2J12J1i11i12(J2J3J5)i21i22J6i61i62-1.22kgm2Q1MHM1i11M6i6130NmQ2M4M1i12M6i6210Nm设M向上为正1J12q2Q1J11q得:H2.13rad/21J22q2Q2J21q图示机构中,件1受驱动力F1,件4受驱动力矩M4,件3受F3作用,方向如图,取广义坐标q1S1,q24。
2014年机械动力学基础考试题 参考答案
2014年机械动力学基础考试题参考答案一、判断题(每个1分,共10分)1、串联弹簧的等效刚度比原来各弹簧的刚度都要小,并联弹簧的等效刚度比原来各弹簧的刚度都要大。
√2、多自由度振动系统的运动微分方程组中,各方程间的耦合就是振动系统的固有性质。
×3、自由振动系统的振幅、初相角及振动频率就是系统的固有特征,与初始条件无关。
×4、固有振型关于质量矩阵、刚度矩阵与阻尼矩阵均具有正交性。
×5、单自由度无阻尼振动系统作用一简谐激励,若初始条件为0,即000x x==,系统不会有自由振动项。
×6、一般情况下,两自由度线性系统的自由振动就是简谐振动。
×7、共振时无阻尼系统的振幅将随时间无限增大,响应滞后激励的相位角为π2。
√8、对于多自由度线性系统,当激振频率与其中任一固有频率相等时,系统都会发生共振。
√9、一般来说,系统的固有频率与固有振型的数目与系统的自由度数目相同。
√10、杜哈梅积分将激励视为非常短的脉冲的叠加,适用于单自由度有阻尼的质量-弹簧系统对任意激励的响应。
√二、简答题(每题5分,共计25分)(1)什么就是机械振动?举例说明振动的优、缺点。
答:机械振动就是指物体(或物体系)在平衡位置(或平均位置)附近来回往复的运动。
第二问为开放题(2)简述机械振动系统的实际阻尼、临界阻尼、阻尼比的联系与区别。
答:实际阻尼就是指振动系统的真实阻尼值,用于度量系统自身消耗振动能量的能力;临界阻尼就是概念阻尼,就是指一个特定的阻尼值,大于或等于该阻尼值,系统的运动不就是振动,而就是一个指数衰运动;阻尼比(相对阻尼系数)等于实际阻尼与临界阻尼之比(3)写出拉格朗日方程的表达式,并解释各符号所代表的含义。
拉格朗日方程的表达式为:)()(d d t Q q U q T q T t j jj j =∂∂+∂∂-∂∂ (j =1,2,…,n )。
式中,,j j q q 为振动系统的广义坐标与广义速度;T 为系统的动能;U 为系统的势能;Q j (t )为对应与广义坐标q j 的除有势力以外的其她非有势力的广义力;n 为系统的自由度数目。
机械系统动力学答案

5. 如何设计参数,使减振器效果最佳?
答:动力减振器视辅助质量与主质量联结方式不同分为:
ⅰ 有阻尼动力减振器(有弹性元件又有阻尼元件与主质量联结) ⅱ 无阻尼动力减振器(有弹性元件无阻尼元件与主质量联结) ⅲ 磨擦减振器(无弹性元件只有阻尼元件与主质量联结)
1)对无阻尼减振器(0ξ=)时:
()()22
1
222221st A u αλδλαλλα-=--- 当 ()21,0n A ωωαλ===即时只有减振器振动
(主系统实现减振)主系统共振危害大。
通常令21,1n n ωωα==即 以消除主系统的共振
2)对有阻尼动力减振器(0ξ≠);
不同值ξ,不同幅频曲线,无论ξ为何值,所有曲线过P 和Q 点。
令该两点分别对应的频率 : 12;P Q λλ⇒⇒ 要使振幅最大值尽可能小。
减振器在整个频率范围内都有好的减振效果。
即:
111max st st st P Q A A A δδδ⎛⎫⎛⎫⎛⎫== ⎪ ⎪ ⎪⎝⎭⎝⎭⎝⎭
按这条件推导减振器最佳参数:22,,k u m αξ→→
a.
即1,st P Q A δ⎛⎫= ⎪⎝⎭ 12A u m ⇒−−
→−−→选定 b.由
11u α=
+ 得 22:k u m αα⇒⇒ c.由()23
3281P Q opt u
u ξξξ+==+ 得ξ
d.验算减振器弹性元件强度:由2A 验算减振器弹簧强度.
3) 对磨擦减振器
图中,无论阻尼比ξ为何值,各曲线都过Q 点(和P 点,0λ=处) 为使Q 点为最高点,求得最佳阻尼比:
opt
ξ=。
机械动力学基础考试题参考答案
机械动⼒学基础考试题参考答案2014年机械动⼒学基础考试题参考答案⼀、判断题(每个1分,共10分)1、串联弹簧的等效刚度⽐原来各弹簧的刚度都要⼩,并联弹簧的等效刚度⽐原来各弹簧的刚度都要⼤。
√2、多⾃由度振动系统的运动微分⽅程组中,各⽅程间的耦合是振动系统的固有性质。
×3、⾃由振动系统的振幅、初相⾓及振动频率是系统的固有特征,与初始条件⽆关。
×4、固有振型关于质量矩阵、刚度矩阵和阻尼矩阵均具有正交性。
×5、单⾃由度⽆阻尼振动系统作⽤⼀简谐激励,若初始条件为0,即000x x==&,系统不会有⾃由振动项。
×6、⼀般情况下,两⾃由度线性系统的⾃由振动是简谐振动。
×7、共振时⽆阻尼系统的振幅将随时间⽆限增⼤,响应滞后激励的相位⾓为π2。
√8、对于多⾃由度线性系统,当激振频率与其中任⼀固有频率相等时,系统都会发⽣共振。
√9、⼀般来说,系统的固有频率和固有振型的数⽬与系统的⾃由度数⽬相同。
√10、杜哈梅积分将激励视为⾮常短的脉冲的叠加,适⽤于单⾃由度有阻尼的质量-弹簧系统对任意激励的响应。
√⼆、简答题(每题5分,共计25分)(1)什么是机械振动?举例说明振动的优、缺点。
答:机械振动是指物体(或物体系)在平衡位置(或平均位置)附近来回往复的运动。
第⼆问为开放题(2)简述机械振动系统的实际阻尼、临界阻尼、阻尼⽐的联系与区别。
答:实际阻尼是指振动系统的真实阻尼值,⽤于度量系统⾃⾝消耗振动能量的能⼒;临界阻尼是概念阻尼,是指⼀个特定的阻尼值,⼤于或等于该阻尼值,系统的运动不是振动,⽽是⼀个指数衰运动;阻尼⽐(相对阻尼系数)等于实际阻尼与临界阻尼之⽐(3)写出拉格朗⽇⽅程的表达式,并解释各符号所代表的含义。
拉格朗⽇⽅程的表达式为:)()(d d t Q q U。
式中,,j j q q &为振动系统的⼴义坐标和⼴义速度;T 为系统的动能;U 为系统的势能;Q j (t )为对应与⼴义坐标q j 的除有势⼒以外的其他⾮有势⼒的⼴义⼒;n 为系统的⾃由度数⽬。
机械动力学第二版第一章习题答案.

1.解:根据势能相等原理:则系统的等效刚度为2解:分别对圆盘左右两边的轴求刚度,由于两轴并联,所以系统的等效刚度:。
3解:有材料力学得,中间点的静挠度为:所以固有角频率为:。
则,于是只需要求出系统的等效质量即可。
有材料力学得:设中间点的挠度为,令物体m在振动过程中的最大速度为:。
于是梁上各点的最大运动速度为:。
中间点的最大动能为:系统的最大动能为:系统的等效质量为:将该式子带入到4.解:在空气中: (1在液体中有系统的振动方程:(2)(3结合(1(3可得:将上式变形后得:5解质量m产生的离心惯性力是。
它在L法线方向的分量(是摆线与O之间的夹角)由几何关系可以得到:(是摆线与水平线之间的夹角)当摆角很小时有:质量m的切向加速度:,(是摆线与质量到O连线的夹角)二力对点取力矩的合力应等于零。
整理后得到(1)无阻尼受迫振动方程为:(2)将(1)(2)对比后得到:系统的固有角频率为:6解:杆与水平面的夹角为,则利用等效质量和等效刚度先把原系统简化到B 点,根据简化后动能相等。
简化前后势能相等。
固有频率:7解:在临界位置系统的自由振动方程的解为:其中,到达平衡位置时,令带入相关数据得8解:在临界点状态时系统的自由度振动方程解为:其中(1)(2)到达平衡位置时,由(1)可得令带入相关数据得到达最远位置时,由(2)可得带入到(1)可得9解:系统的振动方程为其解为式中常数由初始条件确定,利用(1)可得带入(1)得初始响应为:(2)由已知条件可知,。
带入(2)近似得到。
式子中固有频率为,10解:有图示可得F(t)的方程式由傅里叶级数求各项系数分别为将带入。
系统的振动方程为:其中解方程后得:。
机械动力学第三章作业(答案)

3-1 某弹簧质量系统1k ,m ,具有自然频率1f ,第2个弹簧2k 串联于第一个弹簧,其自然频率降至1/21f ,求以1k 表示的2k 。
解:1112k f m π= (1)121212111k k k kk k k ==++1221121122()k k f f m k k π==+ (2)122(1)2(2)k k k +== ,则 123k k =3-2 如图所示,杆a 与弹簧1k 和2k 相连,弹簧3k 置于杆a 的中央,杆b 与弹簧 3k 和 4k 相连,质量m 置于杆b 的中央。
设杆a 和杆b 为质量和转动惯矩可忽略的刚性杆,并能在图示平面内自由移动和转动。
求质量m 上、下振动的固有频率。
解:1114x k =2214x k = 1233122x x x k +=+ 4412x k = 12341111161644e x k k k k ∴=+++ 1234111111161644e ek x k k k k ==+++所以n 1234114111122()44e k f m m k k k k ππ==+++ (2)n f ωπ=3-3求图中系统的固有频率,悬臂梁端点的刚度分别是1k 及3k ,悬臂梁的质量忽略不计。
解: 1k 和2k 为串联,等效刚度为:212112k k k k k +=。
(因为总变形为求和)12k 和3k 为并联(因为12k 的变形等于3k 的变形),则:2132312132121312123k k k k k k k k k k k k k k k k +++=++=+=123k 和4k 为串联(因为总变形为求和),故:424132312143243142141234123k k k k k k k k k k k k k k k k k k k k k k k k e ++++++=+=故:m k en =ω3-4求图所示系统的固有频率,刚性杆的质量忽略不计。
第九章 机械动力学单元测试题(含答案)
第九章机械动力学单元测试题(含答案)1. 问题描述:一辆质量为200 kg的小汽车以速度10 m/s沿直线运动,受到了一个回力为400 N·m的刹车制动力矩,刹车制动力矩持续作用时间为2 s。
求车辆在制动过程中的角加速度。
解答:根据牛顿第二定律,力矩M等于质量m乘以加速度a与质心到转轴的距离r之积,即M = m * a * r。
由于力矩方向与车辆运动方向相反,所以力矩为负值。
所以有 -400 = 200 * a * r。
而车辆的质心到转轴的距离r为车辆的半长即5米,代入计算得到加速度a 约为 -40 m/s²。
角加速度α等于a除以车辆半长r,即α ≈ -40 / 5 = -8 rad/s²。
2. 问题描述:一个质量为5 kg的物体静止地被放在斜面上,斜面的角度为30°。
物体受到的滑动摩擦系数为0.3,求物体受到的摩擦力大小。
解答:物体受到的重力分解为垂直方向力和平行方向力。
垂直方向力等于重力分量,即mg * cos(30°),平行方向力等于重力分量与摩擦系数的乘积,即mg * sin(30°) * 0.3。
所以物体受到的摩擦力大小为mg * sin(30°) * 0.3 ≈ 5 * 9.8 * sin(30°) * 0.3 ≈ 7.35 N。
3. 问题描述:一辆汽车以速度20 m/s行驶在一个半径为100 m的圆弧上,汽车受到的向心力大小为500 N。
求汽车质量。
解答:向心力Fc等于汽车质量m乘以向心加速度ac,即Fc = m * ac。
向心加速度ac等于速度v的平方除以半径r,即ac = v² / r。
所以有500 = m * (20² / 100)。
解得汽车质量m ≈ 500 / 4 = 125 kg。
4. 问题描述:一个质量为2 kg的物体以速度3 m/s向右运动,受到一个力为6 N向左作用,持续时间为2 s,物体的速度改变了多少?解答:物体受到的力等于质量m乘以加速度a,即F = m * a。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
A、急停阶段 B、启动阶段 C、稳定运转阶段 D、停车阶段 72、在动力分析中,主要涉及的力是( ) 。 A、驱动力 B、重力 C、摩擦力 D、生产阻力 73、以下选项中,与等效力有关的是( ) 。 A、外力 B、传动比 C、ωj/v D、vk/v 74、以下选项中,与等效力矩有关的是( ) 。 A、外力据 B、传动比 C、ωj/ω D、vk/ω 75、以下选项中,可归为阻尼的有( ) 。 A、物体的内力 B、物体表面间的摩擦力 C、周围介质的阻力 D、材料的内摩擦 四、填空题(每空 2 分,共 30 空,共 60 分) 76、从惯性载荷被平衡的程度看,平衡可分为 、 和 。 77、机械动力学的分析方法按功能分类可分为 和 。 78、动力学的分析方法按水平分类,可分为 、 、 和 。 79、用质量再分配实现摆动力的完全平衡,其分析方法主要有 、 、 和 。 80、机械系统运转的全过程可分为 、 和 这几个阶段。 81、机器人动力学是机器人 、 和 的基础。 82、工业机器人通常由 、 、 和 组成。 83、二自由度系统的等效转动惯量是系统的 、 、 和 的函数。 84、实现摆动力完全平衡的方法有 、 和 。 76、部分平衡、完全平衡、优化综合平衡 77、动力学反问题、动力学正问题 78、静力分析、动态静力分析、动态分析、弹性动态分析 79、广义质量代换法、线性独立矢量法、质量矩替代法、有限位置法 80、启动阶段、稳定运转阶段、停车阶段 81、操作机设计、控制器设计、动态性能分析 82、执行机构、驱动装置、控制系统、传感系统 83、时间、惯性参数、几何参数、广义坐标 84、加配重、合理布置机构、设置附加机构 五、计算题(第 85、86 题各 30 分,第 87 题 10 分,第 88 题 20 分,共 90 分) 85、如图所示为一对心曲柄滑块机构。曲柄以转速度 ω1 作等速回转运动,曲柄与水平方 向夹角为 θ1 ,曲柄长度为 r ,质心与其回转中心 A 重合。连杆长度 l ,连杆与水平方向夹 角为 θ 2 ,连杆质心 S2 到铰链 B 的距离 BS 2 = L ,连杆质量 m 2 ,对其质心的转动惯量 J 2 。 滑 块质量 m3 ,其质心与铰链 C 重合。1)画出曲柄、连杆和滑块的受力分析图;2)写出曲 柄、连杆和滑块的平衡方程。
一、判断题(每小题 2 分,共 30 题,共 60 分) 1-5√×√×√ 6-10×√√√√ 11-15 ×√××× 16-20 ×√√×√ 21-25 √××√× 26-30 √××√√ 1、机构平衡问题在本质上是一种以动态静力分析为基础的动力学综合,或动力学设计。 ( ) 2、平衡是在运动设计完成之前的一种动力学设计。 ( ) 3、平衡分析着眼于全部消除或部分消除引起震动的激振力。 ( ) 4、优化平衡就是采用优化的方法获得一个绝对最佳解。 ( ) 5、在动力分析中主要涉及的力是驱动力和生产阻力。 ( ) 6、通路定理是用来判断能否实现摆动力完全平衡的理论。 ( ) 7、惯性力的计算是建立在主动构件作理想运动的假定的基础上的。 ( ) 8、当取直线运动的构件作为等效构件时,作用于系统上的全部外力折算到该构件上得 到等效力。 ( ) 9、无论如何,等效力与机械驱动构件的真实速度无关。 ( ) 10、等效质量和等效转动惯量与机械驱动构件的真实速度无关。 ( ) 11、摆动力的平衡一定会导致机械结构的复杂化。 ( ) 12、综合平衡不仅考虑机构在机座上的平衡,同时也考虑运动副动压力的平衡和输入转 矩的平衡。 ( ) 13、作用于等效构件上的等效力(或等效力矩)所作的功等于作用于系统上的外力所作 的功。 ( ) 14、机器人操作机是一个多自由度的闭环的空间机构。 ( ) 15、速度越快,系统的固有频率越大。 ( ) 16、两点动代换后的系统与原有系统在静力学上是完全等效的。 ( ) 17、质量代换是将构件的质量用若干集中质量来代换,使这些代换质量与原有质量在运 动学上等效。 ( ) 18、平衡的实质就是采用构件质量再分配等手段完全地或部分地消除惯性载荷。 ( ) 19、对于不存在多余约束和多个自由度的机构,动态静力分析是一个静定问题。 ( ) 20、弹性动力分析考虑构件的弹性变形。 ( ) 21、优化综合平衡是一个多目标的优化问题,是一种部分平衡。 ( ) 22、摆动力的完全平衡常常会导致机械结构的简单化。 ( ) 23、机构摆动力矩完全平衡的条件为机构的质量矩为常数。 ( ) 24、机构摆动力完全平衡的条件为机构的质量矩为常数 。 ( ) 25、机构摆动力完全平衡的条件是:机构运动时,其总质心作变速直线运动。 ( ) 26、拉格朗日方程是研究约束系统静力动力学问题的一个普遍的方法。 ( ) 27、当以电动机为原动机时,驱动力矩是速度的函数。 ( ) 28、等效质量和等效转动惯量与质量有关。 ( ) 29、在不含有变速比传动而仅含定速比传动的系统中,传动比为常数。 ( ) 30、为了使得等效构件的运动与机构中该构件的运动一致,要将全部外力等效地折算到 该机构上,这一折算是依据功能原理进行的。 ( ) 二、单选题(每小题 2 分,共 30 题,共 60 分) 31-35 BCBCD 36-40 AABCC 41-45 BBDDD 46-50 ABCDA 51-55 ADDBC 56-60 ABADB 31、动力学反问题是已知机构的( ) ,求解输入转矩和各运动副反力及其变化规律。 A、运动状态 B、运动状态和工作阻力 C、工作阻力 D、运动状态或工作阻力
共 6 页,第 1页
32、动态静力分析应用于( ) 。 A、动力学正问题 B、运动学正问题 C、动力学反问题 D、运动学反问题 33、设机构中的活动构件数位 6,含低副数目为 2,含高副数目为 3,则构件的自由度数 为( ) 。 A、10 B、11 C、12 D、13 34、平衡的实质就是采用构件质量再分配等手段完全地或部分地消除( ) 。 A、加速度 B、角加速度 C、惯性载荷 D、重力 35、长期以来人们用加配重使摆动力部分被平衡的方法来减小( ) 。 A、速度 B、体积 C、摩擦 D、振动 36、机构摆动力矩完全平衡的条件为机构的( )为常数。 A、质量矩 B、动量矩 C、转动惯量 D、惯性矩 37、摆动力的完全平衡常常会导致机械结构的( ) 。 A、简单化 B、轻量化 C、复杂化 D、大型化 38、当取定轴转动的构件作为等效构件时,作用于系统上的全部外力折算到该构件上得 到( ) 。 A、等效质量 B、等效转动惯量 C、等效力 D、等效力矩 39、等效质量和等效转动惯量与( )有关。 A、传动比 B、质量 C、转动惯量 D、等效力 40、输入功大于输出功,其差值是( ) 。 A、盈功 B、亏功 C、正功 D、负功 41、在以下所有方法中,概念最清晰、易于理解的是( ) 。 A、广义质量代换法 B、线性独立矢量法 C、质量矩替代法 D、有限位置法 42、优化平衡就是采用优化的方法获得一个( ) 。 A、绝对最佳解 B、相对最佳解 C、实际解 D、理论解 43、在含有连杆机构或凸轮机构等变速比传动的系统中,传动比仅与机构的( )有关。 A、速度 B、角速度 C、加速度 D、位置 44、当以电动机为原动机时,驱动力矩是( )的函数。 A、加速度 B、角加速度 C、速度 D、角速度 45、机器本身是振源,将其与地基隔离开来,以减少其对周围的影响,称为( ) 。 A、隔振 B、减振 C、被动隔振 D、主动隔振 46、在研究摆动力的平衡时,不涉及惯性力矩,可以采用( ) 。 A、静代换 B、动代换 C、静力代换 D、摆动力代换 47、在研究摆动力矩的平衡时,则必须采用( ) 。 A、静代换 B、动代换 C、静力代换 D、摆动力代换 48、机构运转中产生的惯性载荷造成的影响有( ) 。 A、提高机械的精度 B、提高机械的可靠性 C、加剧磨损 D、提高机械效率 49、以下几种方法中,不是机械刚体动力学研究的分析方法的是( ) 。 A、静力分析 B、动态静力分析 C、动力分析 D、弹性动力分析 50、不是现代机械设计的特征是( ) 。 A、大型化 B、精密化 C、高速化 D、轻量化 51、机构的总质心为零的是( ) 。 A、总质心作匀速直线运动 B、总质心作变速直线运动 C、总质心作圆周运动 D、 总 质心作减速运动 52、机构摆动力完全平衡的条件为:机构运动时机构的动量矩为( ) 。
共 6 ,第 4页
图 1 对心曲柄滑块机构 图 2 曲柄滑块机构 86、如图 2 所示曲柄滑块机构,已知构件 1 转动惯量 J1,质心在 O 点,构件 2 质量 m2, 质心 C2,转动惯量 Jc2,构件 3 质量 m3,构件 1 上有驱动力矩 M1,构件 3 有阻力 F3。以构 件 1 为等效构件, 求等效构件的等效转动惯量、 等效力矩、 等效驱动力矩和等效阻力矩。 4 87、承受集中载荷的简支梁如图 3 所示。梁的跨度 l=350cm,梁的截面惯性矩 I=406cm 。 4 3 材料为铝,弹性模量为 E=7×10 MPa,密度为ρ=2700kg/m 。设有一重物 G1=2400N 从 h=2.5cm 高处落下,落于跨度的中点。求梁的固有频率。 (忽略梁自身的重力) 注:简支梁在重物作用下的中点静挠度为 δ st =
共 6 页,第 2页
A、0 B、关于速度的函数 C、关于质量的函数 D、常数 53、无法实现摆动力完全平衡的方法有( ) 。 A、加配重 B、合理布置机构 C、设置附加机构 D、减小体积 54、可以引起机构在机座上的振动的是( ) 。 A、速度的变化 B、摆动力 C、速度的周期变化 D、加速度的变化 55、摆动力完全平衡的缺点有( ) 。 A、减少振动 B、减小摩擦 C、使机械结构复杂化 D、使机械体积增加 56、以下选项中,不能归为阻尼的是( ) 。 A、物体的内力 B、物体表面间的摩擦力 C、周围介质的阻力 D、材料的内摩擦 57、飞轮有( )的作用。 A、平衡器 B、储能器 C、加大系统加速度 D、减小系统惯性 58、描述等效构件运动的方程式形式有( ) 。 A、能量形式 B、动量形式 C、加速度形式 D、平衡力形式 59、为了使得等效构件的运动与机构中该构件的运动一致,不能将( )等效地折算到 该机构上。 A、全部外力 B、所有质量 C、所有转动惯量 D、全部内力 60、当取直线运动的构件作为等效构件时,作用于系统上的全部( )折算到该构件上 得到等效质量。 A、全部外力 B、质量和转动惯量 C、转动惯量 D、全部内力 三、多选题(每小题 2 分,共 15 题,共 30 分) 61、机械动力学的分析方法按功能分类可分为( )和( ) 。 A、动力学反问题 B、动力学正问题 C、运动学正问题 D、运动学反问题 62、假定构件为刚体,且忽略构件的弹性变形的分析方法有( ) 。 A、静力分析 B、动态静力分析 C、弹性动力分析 D、动力分析 63、根据惯性载荷造成的危害,机构的平衡可分为以下几种( ) 。 A、机构在机座上的平衡 B、机构输入转矩的平衡 C、机构滑动副中动压力的平衡 D、运动副中动压力的平衡 64、机构的总质心为零,有( )这些可能。 A、总质心作匀速直线运动 B、总质心作变速直线运动 C、总质心作圆周运动 D、总质心静止不动 65、以下选项中,可以引起机构在机座上的振动的有( ) 。 A、速度的变化 B、摆动力 C、摆动力矩的周期变化 D、加速度的变化 66、以下选项中,以动态静力分析方法为基础计算出来的是( ) 。 A、运动副反力 B、平衡力矩 C、摆动力矩 D、摆动力 67、作用在机械上的力有( ) 。 A、驱动力 B、重力 C、摩擦力 D、生产阻力 68、当取直线运动的构件作为等效构件时,作用于系统上的全部( )折算到该构件 上得到等效质量。 A、全部外力 B、质量 C、转动惯量 D、全部内力 69、描述等效构件运动的方程式有( ) 。 A、能量形式 B、动量形式 C、力矩形式 D、平衡力形式 70、工业机器人通常由( )组成。 A、执行机构 B、驱动装置 C、控制系统 D、传感系统 71、机械系统运转的全过程可分为( )这几个阶段。