030-逻辑功能块
数字电路实验指导书

实验一集成逻辑门电路逻辑功能的测试一、实验目的1.熟悉数字逻辑实验箱的结构、基本功能和使用方法。
2.掌握常用非门、与非门、或非门、与或非门、异或门的逻辑功能及其测试方法。
二、实验器材1.数字逻辑实验箱DSB-3 1台2. 万用表 1只3.元器件: 74LS00(T065) 74LS04 74LS55 74LS86 各一块导线若干三、实验说明1.数字逻辑实验箱提供5 V + 0.2 V的直流电源供用户使用。
2.连接导线时,为了便于区别,最好用不同颜色导线区分电源和地线,一般用红色导线接电源,用黑色导线接地。
3.实验箱操作板部分K0~K7提供8位逻辑电平开关,由8个钮子开关组成,开关往上拨时,对应的输出插孔输出高电平“1”,开关往下拨时,输出低电平“0”。
4.实验箱操作板部分L0~L7提供8位逻辑电平LED显示器,可用于测试门电路逻辑电平的高低,LED亮表示“1”,灭表示“0”。
四、实验内容和步骤1.测试74LS04六非门的逻辑功能将74LS04正确接入面包板,注意识别1脚位置,按表1-1要求输入高、低电平信号,测出相应的输出逻辑电平。
表1-1 74LS04逻辑功能测试表2.测试74LS00四2输入端与非门逻辑功能将74LS00正确接入面包板,注意识别1脚位置,按表1-2要求输入高、低电平信号,测出相应的输出逻辑电平。
3.测试74LS55 二路四输入与或非门逻辑功能将74LS55正确接入面包板,注意识别1脚位置,按表1-3要求输入信号,测出相应的输出逻辑电平,填入表中。
(表中仅列出供抽验逻辑功能用的部分数据)4.测试74LS86四异或门逻辑功能将74LS86正确接入面包板,注意识别1脚位置,按表1-4要求输入信号,测出相应的输出逻辑电平。
五、实验报告要求1.整理实验结果,填入相应表格中,并写出逻辑表达式。
2.小结实验心得体会。
3.回答思考题若测试74LS55的全部数据,所列测试表应有多少种输入取值组合?实验二集成逻辑门电路的参数测试一、实验目的1.掌握TTL和CMOS与非门主要参数的意义及测试方法。
840Dsl选项功能介绍(制造商部分)
Answers for industry.SINUMERIK 840D sl 选项功能介绍制造商部分适用于2.6 以上版本产品手册?? 05.2011SINUMERIK 840D sl 选项功能介绍一个附加的进给轴/主轴6FC5800-0AA00-0YB0 5一个附加的定位轴/辅助主轴6FC5800-0AB00-0YB06附加一个操作方式组6FC5800-0AC00-0YB07一个附加的通道6FC5800-0AC10-0YB08安全轴选项 郊?15 个轴/主轴6FC5800-0AC60-0YB09附加1 个安全轴/主轴6FC5800-0AC70-0YB010带力矩控制的固定点停止功能6FC5800-0AM01-0YB011同步轴对龙门轴6FC5800-0AM02-0YB012主从驱动控制6FC5800-0AM03-0YB013切线控制6FC5800-0AM06-0YB014位置开关信号/软撞块功能6FC5800-0AM07-0YB015高级位控功能APC6FC5800-0AM13-0YB016同步主轴/多边形车削COUP6FC5800-0AM14-0YB017多轴插补gt 4 插补轴6FC5800-0AM15-0YB018主从耦合以及曲线表插补LEAD6FC5800-0AM20-0YB019电子齿轮EG6FC5800-0AM22-0YB020端面和圆柱面转换6FC5800-0AM27-0YB021斜轴转换功能6FC5800-0AM28-0YB022冲压/剪切功能6FC5800-0AM33-0YB023电子转换6FC5800-0AM35-0YB024高级同步动作6FC5800-0AM36-0YB025内部驱动变量分析6FC5800-0AM41-0YB026从轮廓快速回退的异步中断子程序6FC5800-0AM42-0YB027异步子程序及同步动作6FC5800-0AM43-0YB028轮廓监控6FC5800-0AM52-0YB029悬垂度补偿多维6FC5800-0AM55-0YB030基本安全集成功能SI-Basic6FC5800-0AM63-0YB031高级安全集成功能SI-Comfort6FC5800-0AM64-0YB032耦合功能基本组合选项CPBasic6FC5800-0AM72-0YB033耦合功能高级组合选项CPComfort6FC5800-0AM73-0YB034SINUMERIK 840D sl 选项功能介绍耦合功能专家组合包CP Expert6FC5800-0AM74-0YB035耦合功能组—静态级6FC5800-0AM75-0YB036高级电子转换CP6FC5800-0AM76-0YB037刀具管理gt 3个刀库6FC5800-0AM88-0YB038不配置SINUMERIK OP 操作面板6FC5800-0AP00-0YB039操作软件HMI PRO sl RT 6FC5800-0AP47-0YB040电子钥匙系统6FC5800-0AP53-0YB0415 轴加工包附加第7 轴6FC5800-0AS01-0YB042多轴扩展包6FC5800-0AM10-0YB043紧急回退ESR 功能6FC5800-0AM61-0YB044SINUMERIK Operate programming package 开发包运行授权6FC5800-0AP60-0YB045SINUMERIK Operate Easy Screen 定制画面运行授权6FC5800-0AP64-0YB046SINUMERIK 840D sl 选项功能介绍SINUMERIK 840D sl 选项功能介绍—一个附加的进给轴/主轴6FC5800-0AA00-0YB0目前SINUMERIK 840D sl 系统的CNC 软件在包含的轴数上有两种版本▲ 6-3包含3 个轴/主轴最多可以扩展到6 个轴/主轴▲ 31-5包含 5 个轴/主轴最多可以扩展到31 个轴/主轴可以在机床所配置的CNC 软件的基础下根据实际需要选择附加的进给轴/主轴个数。
三菱PLC应用指令分解
功能:指令执行时源操作 数[S.]与[S1.]和[S2.]的 内容进行比较,并比较结 果用目标元件[D.]的状态 来表示。
Date: 2020/3/1
Page: 5
昆山捷梯三菱培训
指令使用说明:
源操作数可以是K、H、KnX、KnY、KnM、KnS、T、C、 D、V、Z;目标操作数是Y、M、S。 源操作数进行比较时,比较结果放入3个连续的目的操作数 继电器中。注意区间比较时S1不能大于S2。
源操作数[S1]为X000-X005;源操作数[S2]可以是K、H、 KnX、KnY、KnM、KnS、T、C、D、V、Z;目标操作数 是T、C、D、V、Z。
在源操作数[S1]中用到的X元件,不能作为其他高速计数 器的输入端。
输入端X000-X005的最高输入频率与一相高速计数器相 同,如与高速计数器、脉冲输出指令PLSY、可调脉冲输出 指令PLSR同时使用时,其频率应限制在规定频率的范围之 内。
Date: 2020/3/1
Page: 10
昆山捷梯三菱培训
指令使用举例:
在某生产包装线上每来一个产品时,机械手将其放入包装箱 中,当包装箱中放入产品个数等于设定值时,工人将包装箱 打包好,并放上新的包装箱,机械手将产品放入下一个包装 箱。试用应用指令实现功能。
Date: 2020/3/1
Page: 11
Date: 2020/3/1
Page: 27
昆山捷梯三菱培训
Date: 2020/3/1
Page: 28
昆山捷梯三菱培训
数据处理指令(FNC40~FN49)
Date: 2020/3/1
Page: 29
昆山捷梯三菱培训
一、区间复位指令
区间复位指令ZRST是将操作数D1~D2之间的同类位元件成批 复位。指令格式如下:
三菱plc基本逻辑指令状态转移图

辅助继电器(M) ①通用辅助继电器
●通用辅助继电器和输出继电器一样,在PLC电源中断后, 其状态将变为OFF。当电源恢复后,除因程序使其变为 ON外, 其它仍保持OFF X0 M0 M0 M0
辅助继电器(M) ①通用辅助继电器
编号: (按十进制编号)
FX0S
M0~ M495
FX1S
M0~ M383
外部电源 驱动能力 最大负载
AC250V或DC30V以下 2A/1点 8A/4点 8A/8点 感性负载 80VA 灯负载 100W 约10ms 继电器隔离 输出ON时LED亮
响应时间 电路隔离 输出状态显示
FX0N、FX1N系列PLC(输出性能指标②)
------- 晶体管输出 (T) 外部电源 驱动能力 DC5~30V 0.5A/1 点 0.8A/4点
M8002(M8003)----初始脉冲特殊辅助继电器
M8002(M8003)只在PLC开始运行的第一个扫描周期内 得电(断电),其余时间均断电(得电)。
常用M8002 的触点作为 一些继电器 的初始化复 位信号
辅助继电器(M) ③特殊辅助继电器(触点型3)
M8011、M8012、M8013、M8014
驱动能力 最大负载
0.3A/点 0.8A/4点 感性负载 15VA/AC100V、30VA/AC200V 灯负载 30W 开路漏电流 1mA/AC100V 2mA/AC200V 响应时间 ON:1ms OFF: 10ms 电路隔离 光电晶闸管隔离 输出状态显示 输出ON时LED亮
FX0S、FX1S系列PLC
辅助继电器(M)
◆辅助继电器是PLC中数量最多的一种继电器,其作用相当于 继电器控制系统中的中间继电器。 ◆和输出继电器一样,其线圈由程序指令驱动,每个辅助继电 器都有无限多对常开常闭触点,供编程使用。但是,其触点不 能直接驱动外部负载,要通过输出继电器才能实现对外部负载 的驱动。 ◆ FX系列PLC的辅助继电器有:通用辅助继电器 (三种) 保持辅助继电器 特殊辅助继电器
PLC六层电梯控制系统
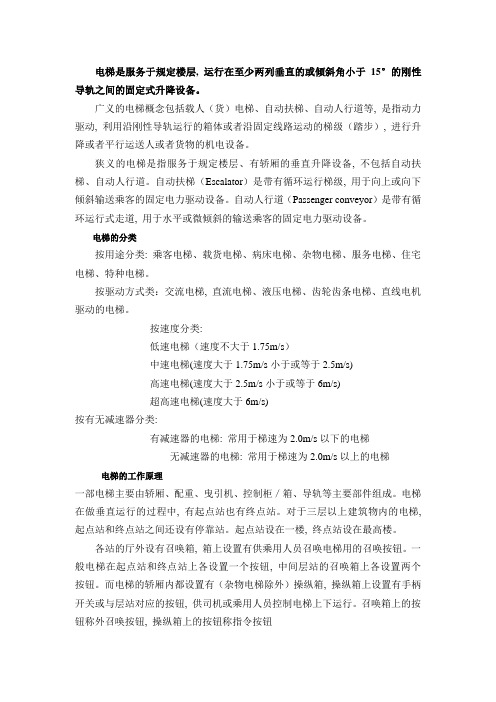
电梯是服务于规定楼层, 运行在至少两列垂直的或倾斜角小于15°的刚性导轨之间的固定式升降设备。
广义的电梯概念包括载人(货)电梯、自动扶梯、自动人行道等, 是指动力驱动, 利用沿刚性导轨运行的箱体或者沿固定线路运动的梯级(踏步), 进行升降或者平行运送人或者货物的机电设备。
狭义的电梯是指服务于规定楼层、有轿厢的垂直升降设备, 不包括自动扶梯、自动人行道。
自动扶梯(Escalator)是带有循环运行梯级, 用于向上或向下倾斜输送乘客的固定电力驱动设备。
自动人行道(Passenger conveyor)是带有循环运行式走道, 用于水平或微倾斜的输送乘客的固定电力驱动设备。
电梯的分类按用途分类: 乘客电梯、载货电梯、病床电梯、杂物电梯、服务电梯、住宅电梯、特种电梯。
按驱动方式类:交流电梯, 直流电梯、液压电梯、齿轮齿条电梯、直线电机驱动的电梯。
按速度分类:低速电梯(速度不大于1.75m/s)中速电梯(速度大于1.75m/s小于或等于2.5m/s)高速电梯(速度大于2.5m/s小于或等于6m/s)超高速电梯(速度大于6m/s)按有无减速器分类:有减速器的电梯: 常用于梯速为2.0m/s以下的电梯无减速器的电梯: 常用于梯速为2.0m/s以上的电梯电梯的工作原理一部电梯主要由轿厢、配重、曳引机、控制柜/箱、导轨等主要部件组成。
电梯在做垂直运行的过程中, 有起点站也有终点站。
对于三层以上建筑物内的电梯, 起点站和终点站之间还设有停靠站。
起点站设在一楼, 终点站设在最高楼。
各站的厅外设有召唤箱, 箱上设置有供乘用人员召唤电梯用的召唤按钮。
一般电梯在起点站和终点站上各设置一个按钮, 中间层站的召唤箱上各设置两个按钮。
而电梯的轿厢内都设置有(杂物电梯除外)操纵箱, 操纵箱上设置有手柄开关或与层站对应的按钮, 供司机或乘用人员控制电梯上下运行。
召唤箱上的按钮称外召唤按钮, 操纵箱上的按钮称指令按钮本设计主要研究六层六站的电梯控制系统, 分述其硬件设计和软件设计过程。
北汽越野车线体说明书书

北汽越野车B80A 生产线说明书(B80A)北京汽车集团有限公司越野车分公司2. 设备概述 (3)一、自动线电气配置 (5)1.硬件配置原则 (5)2.控制网的配置 (8)3.软件框架 (9)二、设备硬件组成 (11)1.配板 (11)2.接线(各工位) (12)3.硬件说明 (13)三、软件的组成 (13)1. 安装 (13)2. 通讯联接 (14)3. 应用方法 (15)四、控制程序中各项内容: (15)1.各程序块的功能 (15)2.FC块的编制 (15)3.组织块的调用 (15)4.故障时按钮组合应用 (16)五工位介绍 (17)1.UB010工位 (17)2.UB020工位 (17)3.MB010工位 (19)4.MB020工位 (23)5.MB030工位 (24)6.MB040工位 (26)7.MB050工位 (28)六设备介绍 (30)1主控制柜(MCP): (30)2电源分配柜(PDP): (31)3 焊接控制柜(WDP): (31)4 变频器控制柜(VFD): (32)5、灯、按钮功能说明 (33)5.1MCP盒柱灯: (33)5.2操作盒灯、按钮功能 (34)6、画面说明 (42)6.1状态: (43)6.2故障: (44)6.3区域一览: (45)6.4紧急急停: (50)6.5网络状态: (51)6.6速度操作界面: (51)7、操作过程说明 (53)7.1启动自动线 (53)7.2单机自动 (54)7.3单机手动 (55)1、网络故障 (56)2、自动线故障 (56)八设备维护说明 (58)1、PLC维护 (58)1. 前言本操作手册是对北京汽车集团有限公司越野车分公司B80A自动化生产设备的运行以及操作进行了详细的介绍和说明,请在仔细阅读本书的基础上安全正确有效的操作生产设备,以确保设备正常的工作。
1.为了确保自动化生产设备的正确操作,请将本使用说明书保管在能够随时取阅的地方;2. B80A自动化生产设备的操作人员须为接受过培训与指导的工作人员;3.请仔细阅读并充分理解本使用说明书的内容,否则不得进行设备的操作。
某电厂M701DA型燃气轮机一次调频功能分析及改进
某电厂M701DA型燃气轮机一次调频功能分析及改进吴志方【摘要】对M701DA型燃气轮机一次调频功能进行了分析.该燃机可在三种模式下参与电网的一次调频,其中投入自动负荷运行开启模式的转速控制方式下调频性能最优,能够快速响应并实现无差调节.为提高电网的电能品质,满足电网对并网机组一次调频的监督与管理,控制系统中增设一次调频在线测试功能,从而验证该系统的功能完备性、运行正确性.【期刊名称】《燃气轮机技术》【年(卷),期】2013(026)001【总页数】6页(P67-72)【关键词】一次调频;在线测试;改进【作者】吴志方【作者单位】四川东方电气自动控制工程有限公司,四川德阳618000【正文语种】中文【中图分类】TK4771 机组概述某电厂联合循环机组由1台燃气轮机、1台汽轮机、1台余热锅炉和2台发电机组成。
燃气轮机为日本三菱重工设计,型号为 M701DA,干式、低NOX排放,由19级的压气机、18个预混式低NOX燃烧器和4级透平组成,标准工况下额定负荷为144 MW。
网调对机组一次调频的主要技术参数要求如下:(1)一次调频死区不大于±0.033 Hz。
(2)调速系统转速不等率控制在5%以内。
(3)一次调频负荷限制幅度不小于机组额定负荷的6%。
(4)一次调频响应滞后时间小于3 s。
(5)一次调频负荷响应至该次扰动调频幅度90%的响应时间小于15 s。
(6)一次调频测试开始45 s内,一次调频平均调节负荷不小于机组额定负荷的2%。
2 M701DA一次调频控制方式分析M701DA型燃气轮机对负荷调节具有4种基本方式:自动负荷运行关闭模式下的转速控制、负荷限制控制,自动负荷运行开启模式下的转速控制、负荷限制控制。
2.1 转速控制方式采用纯比例P控制回路,不等率为4%,进行转速自动调节。
在机组并网前,额定转速下进行自动同期调节或进行空负荷时的转速调节。
机组并网后,若机组在转速控制方式下运行,通过改变转速设定值“SPSET”来改变机组的负荷,转速设置3 000 r/min时为0 MW,转速设置3 120 r/min(不等率为4%)时为额定负荷,这与纯液调机组通过改变同步器来改变机组负荷相似。
广东省职业技能等级证书认定考试 12.工业视觉系统运维员理论知识评价要点
注:根据国家职业技能标准,理论考试时间为90 分钟,技能考试时间不少于120 分钟。
一、基本要求(权重比例20%)(一)职业道德1、职业道德基本知识001 职业道德的的基本内涵002 企业文化的功能003 文明礼貌的具体要求004 对诚实守信基本内涵的理解005 勤劳节俭的现代意义2、职业守则001 遵纪守法的规定002 爱岗敬业的具体要求003 严格执行安全操作规程的重要性004 团结合作的基本要求005 文明生产的具体要求006 着装整洁的要求007 爱护设备和工具的基本要求008 开拓创新的具体要求(二)基础知识1、机械系统装调知识001 测量定义及分类002 形位公差的种类2、电气系统装调知识001 电路的作用与组成部分002 电气识图基础003 传感器种类及应用004 分辨率、精度、可重复性005 可编程序控制器的基本组成3、工业视觉系统操作知识001 工业相机的结构知识002 相机传感器的类型003 相机数据接口类型004 相机光学接口类型005 和M OS 的原理和应用优势006 传感器的快门类型007 MOS 传感器的快门类型008 相机的主要参数009 分辨率010 像元尺寸与靶面尺寸011 帧率/行频012 信噪比013 镜头的分类和性能参数014 成像系统的基本参数015 焦距和视场016 畸变的定义与分类方法017 光源的作用和分类方法018 不同类型光源的特点019 光通量的概念、单位020 发光强度的概念、单位021 光照强度的概念、单位022 颜色/波长的概念、单位023 色温的概念、单位024 三原色的光谱波长025 打光术语及效果分析方法026 光源驱动器的定义027 光源驱动器的分类和特点028 机器视觉算法平台常见算法工具分类方法029 模版匹配的原理030 几何查找类算法工具及原理031 识别类算法工具及原理032 缺陷检测类算法工具033 图像的颜色空间类型034 图像滤波的原理、分类和常见模板035 形态学算法的原理及常用方法036 图像增强的原理和常用方法4、生产安全与环境保护知识001 安全用电002 安全操作与劳动保护5、质量管理知识001 质量管理目标和要求002 岗位质量保证措施与责任6、相关法律、法规知识001 《中华人民共和国劳动法》相关知识002 《中华人民共和国安全生产法》相关知识二、相关知识要求(权重比例80%)(一)工业视觉系统构建1、装配准备001 识读设备装配作业指导书002 装配工具的使用方法003 装配工装的使用方法004 机械零部件的选用方法005 电气零部件的选用方法2、硬件安装001 工业视觉相机的结构知识002 工业镜头的结构知识003 视觉光源的结构知识004 光源控制器的结构知识005 视觉光源的选型及特点区分方法006 工控机的结构知识007 工业镜头的选型及特点区分方法008 工业相机的选型及特点区分方法009 工业视觉相机的工作原理010 工业镜头的工作原理011 视觉光源的工作原理012 光源控制器的工作原理013 工业视觉相机的型号解读方法014 光源控制器型号解读方法015 网卡型号解读方法016 内存条型号解读方法017 硬盘型号解读方法018 工控机型号解读方法019 光圈型号解读方法020 工业镜头的型号解读方法021 视觉光源的型号解读方法022 工业视觉相机的安装及调试前准备方法023 工业镜头的安装及调试前准备方法024 视觉光源的安装及调试前准备方法025 光源控制器的安装及调试前准备方法026 网卡的安装方式027 网卡电源供电确认方法028 内存条的安装方式029 硬盘的安装方法030 工控机识图接线方法031 光源识图和接线方法032 相机识图和接线方法033 视觉控制器识图接线方法034 显示器识图接线方法035 电气硬件安装前的注意事项036 视觉硬件安装方法037 工控机的工作原理038 镜头焦距调节方法039 镜头光圈调节方法040 光源的打光方法041 镜头的选择方法042 相机成像效果调整方法2、软件安装001 视觉调试软件(VsonMstr)使用方法002 工控机系统设置方法003 工控机环境设置方法004 工控机P设置方法005 工业视觉软件安装方法(VsonMstr))006 工业视觉软件卸载方法(VsonMstr))007 工业视觉软件更新方法(VsonMstr))3、软件使用001 工业视觉软件的注册使用方法002 工业视觉软件的登录使用方法003 VsonMstr 软件相机P设置方法004 VsonMstr 软件采图设置方法005 VsonMstr 软件图像保存方法006 VsonMstr 软件定位工具模块验证使用功能的方法007 VsonMstr 软件图像生成模块验证使用功能的方法008 VsonMstr 软件线圆测量模块验证使用功能的方法009 VsonMstr 软件圆圆测量模块验证使用功能的方法010 VsonMstr 软件点圆测量模块验证使用功能的方法011 VsonMstr 软件点线测量模块验证使用功能的方法012 VsonMstr 软件线线测量模块验证使用功能的方法013 VsonMstr 软件点点测量模块验证使用功能的方法014 VsonMstr 软件圆拟合模块验证使用功能的方法015 VsonMstr 软件直线拟合模块验证使用功能的方法016 VsonMstr 软件亮度测量模块验证使用功能的方法017 VsonMstr 软件像素统计模块验证使用功能的方法018 VsonMstr 软件直方图工具模块验证使用功能的方法019 VsonMstr 软件几何创建模块验证使用功能的方法020 VsonMstr 软件标定工具模块验证使用功能的方法021 VsonMstr 软件运算模块验证使用功能的方法022 VsonMstr 软件图像处理模块验证使用功能的方法023 VsonMstr 软件拆分组合模块验证使用功能的方法024 VsonMstr 软件颜色处理模块验证使用功能的方法025 VsonMstr 软件缺陷检测模块验证使用功能的方法026 VsonMstr 软件逻辑工具模块验证使用功能的方法027 VsonMstr 软件通信模块验证使用功能的方法028 VsonMstr 全局功能模块验证使用功能的方法029 VsonMstr 软件测量系统R R 数据验证使用功能的方法030 VsonMstr 软件测量系统偏倚线性数据验证使用功能的方法031 VsonMstr 软件定位系统可行性数据验证使用功能的方法032 VsonMstr 软件测量系统相关性数据验证使用功能的方法(二)工业视觉系统编程与调试1、系统调试001 视觉现场应用实施的主要流程002 通讯协议的使用方法003 软件系统的安装调试方法004 P 设置规范调试方法005 VsonMstr 软件配置方法006 视觉应用系统方案的调整方法007 动静态测试方式008 系统相机精度调试方法009 系统标定与示教的调试方法010 系统标定与示教的问题排查方法2、光学调试001 光学调试的主要流程002 光源调试的成像效果标准003 打光测试前期准备方法004 打光调试的光源颜色选择方法005 光学调试的方法——增加目标对比度006 光学调试的方法——过滤干扰007 光学调试的方法——不同材质反射008 光学调试的方法——紫外光源荧光效应009 光学调试的方法——红外光源穿透性010 光源打光方式的选择方法011 背光测试的方法012 平行背光测试的方法013 暗场照明与明场照明的调试方法014 光源尺寸的计算方法015 光源测试要求3、功能调试001 Vson Mstr OR 识别的调试及应用方法002 Vson Mstr 一维码识别的使用方法和应用场景003 Vson Mstr 二维码识别的使用方法和应用场景004 Vson Mstr 颜色抽取的调试及应用方法005 Vson Mstr 颜色识别的调试及应用方法006 Vson Mstr 直线的边缘缺陷检测的调试及应用方法007 Vson Mstr 圆的边缘缺陷检测的调试及应用方法008 Vson Mstr 模型边缘缺陷检测的调试及应用方法009 Vson Mstr 边缘对边缘缺陷检测的调试及应用方法010 Vson Mstr 图像滤波算法的调试及应用方法011 Vson Mstr 开闭运算算法的调试及应用方法012 Vson Mstr 腐蚀运算算法的调试及应用方法013 Vson Mstr 膨胀运算算法的调试及应用方法014 Vson Mstr 图像增强算法的调试及应用方法015 特征匹配类算法在V son Mstr 中的调试及应用方法016 几何查找类算法V son Mstr 中的调试及应用方法017 识别类算法在V son Mstr 中的调试及应用方法018 色彩类算法在V son Mstr 中的调试及应用方法019 缺陷检测类算法在V son Mstr 中的调试及应用方法020 定位类算法在V son Mstr 中的调试及应用方法021 图像处理类算法在V son Mstr 中的调试及应用方法022 Vson Mstr 中视觉工具的调用方法023 Vson Mstr 视觉方案设计方法024 Vson Mstr 深度学习功能的使用方法和应用场景025 Vson Mstr 逻辑功能的使用方法和应用场景026 Vson Mstr 通信功能的配置和调试方法027 抓取场景的相机设置方法与特征选取的调试方法028 纠偏场景的相机设置方法与特征选取的调试,纠偏算法的使用方法029 对位贴合场景的相机设置方法与特征选取的调试、纠偏算法的使用方法030 机器视觉系统的几种标定方法,包括9点标定和 12点标定的算法设置方法031 系统标定的使用方法032 建立基准与示教的使用方法033 求差计算的使用方法034 映射算子的调试方法035 深度学习的硬件配置使用方法036 字符识别模型的训练搭建与调试方法037 目标检测模型的训练训练搭建与调试方法038 目标检测模型的训练训练搭建与调试方法039 图像分类模型的训练训练搭建与调试方法040 图像分割模型的训练训练搭建与调试方法041 图像检索模型的训练训练搭建与调试方法042 异常检测模型的训练训练搭建与调试方法(二)工业视觉系统维护与保养1、系统维护001 工业相机参数点检方法002 工业镜头参数点检方法003 视觉光源参数点检方法004 光源控制器参数点检方法005 视觉工控机参数点检方法006 工业相机安装点检方法007 工业镜头安装点检方法008 镜头工作距离安装点检方法009 光源高度安装点检方法010 工业相机接线方法安装点检方法011 视觉光源通电方法安装点检方法012 光源控制器通电方法安装点检方法013 视觉工控机通电方法安装点检方法014 显示屏、鼠标、键盘安装点检方法015 网卡安装点检方法016 硬盘安装点检方法017 内存条安装点检方法018 加密狗安装点检方法019 工业相机故障分析方法020 工业镜头故障分析方法021 视觉光源故障分析方法022 光源控制器故障分析方法023 视觉工控机故障分析方法024 显示屏、鼠标、键盘故障分析方法025 网卡故障分析方法026 硬盘故障分析方法027 内存条故障分析方法028 视觉图像质量分析方法029 工业相机通讯故障分析方法030 光源控制器通讯故障分析方法031 视觉工控机通讯故障分析方法032 视觉软件通讯故障分析方法033 视觉系统拍照异常分析方法034 棋盘格标定系统异常分析方法035 N 点标定系统异常分析方法036 旋转中心系统异常分析方法037 建模系统异常分析方法038 定位工位系统参数异常分析方法039 测量工位系统参数异常分析方法040 检测工位系统参数异常分析方法2、系统保养001 工业相机安装使用环境及注意事项002 工业镜头安装使用环境及注意事项003 视觉光源安装使用环境及注意事项004 光源控制器安装使用环境及注意事项005 视觉工控机安装使用环境及注意事项006 工业相机除尘方法及步骤007 工业镜头除尘方法及步骤008 视觉光源除尘方法及步骤009 光源控制器除尘方法及步骤010 视觉工控机除尘方法及步骤011 工业相机存放方法012 工业镜头存放方法013 视觉光源存放方法014 光源控制器存放方法015 视觉工控机存放方法016 显示器安装环境及注意事项017 键盘安装环境及注意事项018 鼠标安装环境及注意事项019 显示器存放方法020 键盘存放方法021 鼠标存放方法022 视觉维保手册填写方法注:根据国家职业技能标准,理论考试时间为90 分钟,技能考试时间不少于120 分钟。
AMK伺服系统使用说明书

A M K伺服系统使用说明书(总60页)--本页仅作为文档封面,使用时请直接删除即可----内页可以根据需求调整合适字体及大小--AMK伺服系统使用说明书目录系统简介————————————————1电源模块————————————————9驱动模块————————————————15控制面板————————————————24参数配置————————————————30故障诊断————————————————046附录:参数列表一、系统简介1.伺服电机AMK伺服电动机分DH、DS、DT、DV和DW等系列,其编码器分为旋转变压器型编码器(R)、HiperFace接口型编码器(S/T)、EnData接口型编码器(E/F)和增量型编码器(I)。
其中,旋转变压器型编码器通过DB9型插头连接到KW驱动器的X130接口;其他型号的编码器通过DB15型插头连接到KW驱动器的X131接口。
AMK伺服电动机编码器接口引脚功能表KW驱动器编码器接口引脚功能表AMK伺服电机的动力接线也采用航空插头的接线方式,其根据电机功率大小采用的插头大小不同,但其动力电缆的引脚分布基本相同。
AMK电机动力接口引脚功能表引脚功能引脚功能PE A热敏电阻1U B热敏电阻4V C抱闸3W D抱闸AMK伺服电机型号定义1)DW液体冷却主轴电机DW系列液体冷却三相异步电机在高功率时也有紧凑的结构,恒功率调速范围为1:3,额定功率可高达28kW,额定力矩可高达,重载型设计和加强型轴承允许高径向载荷。
DW伺服电机型号定义及名牌数据2)DS系列同步伺服电机DS系列同步伺服电机具有结构紧凑,高动态响应,调速范围宽等特点。
这些无刷的永磁交流伺服电机,是4极的或6极的。
DS系列伺服电机型号定义及名牌数据3)DV系列伺服电机DV系列伺服电机是坚固的感应式异步交流电机,不会消磁,具有较高的过载能力和平稳的运行特性。
DV伺服电机在从0加速到额定速度的过程中提供的几乎是恒定转矩,最高转速可扩展至10000r/min,力矩范围为。
题号 题面 A B C D 答案 001 Word 2000提供的视图方式有
题号题面A B C D 答案001 Word 2000提供的视图方式有______。
普通视图大纲视图页面视图WEB版式视图ABCD 002 在Word 2000中,若要“打印预览”,可以______。
打开“编辑”下拉菜单,选择“打印预览”项打开“文件”下拉菜单,选择“打印预览”项单击工具栏的“打印预览”按钮按Ctrl+F2快捷键BCD 003 材料核算子系统的日常核算,包括______。
出库凭证的处理计算材料成本差异材料采购凭证的处理入库凭证的处理ABCD 004 一旦保存凭证,______不得再做修改。
凭证科目凭证类别凭证金额凭证编号BD 005 个人往来科目的设置,在账务系统中可采用______。
仅设立总账科目,并将总账科目描述为个人往来核算与手工核算同样的设置方法在总账科目下设立划分业务类型的二级科目,将二级科目描述为个人往来核算与手工核算同样的设置方法,并将最低级科目描述为往来核算ABC 006 多媒体功能卡包括______等。
多媒体压缩卡图形加速卡名片卡视频卡ABD 007 硬盘属于______。
随机存储器外部存储器辅助存储器内部存储器BC 008 在Excel 2000中,调整行高的方式______。
选择“格式”菜单下的“行”中的“行高”选项进行调整选择“文件”菜单下的“行”中的“行高”选项进行调整将鼠标指针移动到工作表两个行序号按钮之间,按住并拖动鼠标进行调整选择“编辑”菜单下的“行”中的“行高”选项进行调整AC 009 Excel 2000中,默认状态下单元格内输入下列______数据将会自动右对齐。
30% -300 $30 &600 ABC 010 在Excel 2000中同时选中两个单元格,并在数据编辑栏中输入数字2,下列说法错误的是______。
按键盘Enter键后,两个单元格的数值都是2 单击数据编辑栏中的“输入”按钮后,两个单元格的数值都是2 按键盘Ctrl+Enter键后,两个单元格的数值都是2 按键盘Enter键后,只有其中一个单元格的数值是2 AB 011 下列______操作,可以在资源管理器中实现。
站场电动放空阀控制逻辑的形式化建模与验证

现代电子技术Modern Electronics Technique2023年9月1日第46卷第17期Sep. 2023Vol. 46 No. 170 引 言随着长距离油气输送管道建设、运行及管理模式向“无人化/少人化”发展,自动化程度不断提升,管道输送工艺日趋复杂,无疑对管道控制系统的逻辑安全性与可靠性提出了更高的要求[1]。
相较于阀门、输油泵、压缩机等显性元件,基于元件间隐性逻辑关系的控制逻辑更被视为长输油气管道自动控制的核心。
管道控制逻辑多以逻辑图或程序流程图等图形化方式呈现,用于描述操作原理,为系统集成厂商提供相应的编程依据,可分为单体控制逻辑与联锁控制逻辑,单体控制逻辑用于描述设备本身所具有的逻辑功能,如调节阀、开关阀等,联锁控制逻辑则用于描述多台设备的联锁控制,如站启/停输、紧急停车(Emergency Shutdown System, ESD )等[2]。
站场电动放空阀控制逻辑的形式化建模与验证董秀娟1, 赵浩羽2, 徐宝昌2, 周裕东2, 董长锁1, 赵正开1(1.国家管网集团北京管道有限公司, 北京 100101;2.中国石油大学(北京) 信息科学与工程学院, 北京 102249)摘 要: 在油气管道控制系统典型逻辑标准编制的早期,对拟标准化控制逻辑的建模与验证能够提前发现设计缺陷,有助于提高控制系统的功能完整性与安全性,进而避免因控制逻辑设计失误导致的危险事故发生。
根据形式化验证方法中模型检验的原理,利用时间自动机及其验证工具UPPAAL ,对天然气站场电动放空阀通用控制逻辑开展形式化建模与验证,将逻辑图中的各类功能组件以及阀门动作流程独立建模,用于刻画完整的控制逻辑操作过程,综合验证结果发现,阀门的“开”“关”切换逻辑存在设计缺陷。
最后,通过反例分析给出合理的优化方案,优化后的验证结果表明,优化方案能够满足控制系统功能完整性与安全性需求,形式化方法为管道站控系统控制逻辑可靠性验证提供了一个全新的技术路径。
第五节 PLC的基本逻辑指令

第五节PLC的基本逻辑指令教学目的:学习PLC基本编程指令学习PLC基本编程指令的功能教学难点:让学生们熟练运用PLC各种编程指令教学重点:应知:PLC的基本编程指令应会:熟练使用PLC基本编程指令编制简单的应用程序教学学时:讲解2课时,实训4课时(一)基本逻辑指令的功能一、逻辑取及输出指令:LD/LDI/OUT指令例1:LD/LDI/OUT指令的基本编程方法。
下图为应用梯形图编制的程序,其对应的语句表程序如下:模拟运行:按下1楼按钮后,1楼灯亮,松开按钮后灯灭;没有按下2楼按钮,2楼灯延时一定时间亮,按下2楼按钮后灯灭。
注:请注意常开、常闭触点的使用说明:1)LD/LDI指令用于取常开/常闭触点与母线连接。
另外,在分支开始出,这些指令与后述的ANB(块与)指令组合使用。
2)OUT指令用于驱动输出继电器、辅助继电器、状态器、定时器及计数器的线圈,但不能用来驱动输入继电器的线圈。
3)多个线圈并联时,称为并行输出。
并行输出指令可以重复多次使用。
为了使输入状态的变化能被CPU有效地接受,通常要求输入信号的接通(ON)时间或断开(OFF)时间,必须大于PC的扫描周期。
若输入窄脉冲,有可能得不到PC得响应。
考虑到输入滤波器得相应定时器为10MS,若PC的扫描周期为10MS,则输入信号的接通时间或断开时间至少为20MS以上,因此当输入信号的频率高于25HZ时,则不能被PC有效的接受和处理。
但是使用后述的有关特殊功能指令,可以处理高频率的输入信号。
1、多重输出操作如图所示,输出继电器的线圈Y3被安排在两个位置上(双重输出),j假定在输入处理阶段X1=ON,X2=OFF。
最初因X1=ON,使Y3第一次出现时其映象机春起的状态为ON,Y4的映象寄存器的状态也为ON。
又因为X2=OFF,使Y3第二次出现时其映象寄存器的状态改为OFF。
因此,最终的外部输出为Y3=ON。
由以上分析可知,当执行多重输出操作时,最后执行的输出操作优先。
软件工程毕业设计题目

软件工程毕业设计题目【篇一:电脑软件工程毕业论文选题】以下是:软件工程论文毕业论文选题软件工程论文电脑论文相关选题 q001web的入侵防御系统的设计与实现q002基于web的新闻发布系统q003基于web service的数据库同步系统的设计与实现q004基于短信平台聊天程序的设计与实现q005基于webservice的异构数据库检索系统的设计q0063g的aka协议中f1至f5的服务网络端实现q007家庭理财系统的设计与实现q008“欢乐时光”病毒检测工具的实现q009基于lotus的故障报修系统的设计与实现q010多语种视频音频播放器的设计与实现q011实验室电脑的ip地址自动设置程序——客户端的设计与实现q012基于改良的bm算法在ids中的实现q013第二代木马的研究与实现q014win32平台下的pe文件病毒的研究及实现q015机房监控系统的设计与实现q016rsa密码体制的实现q017虚拟实验平台的网络化改良方向—教师管理模块的设计与实现q018基于网络的虚拟实验平台—电路管理模块的设计与实现q019网络数据包的协议分析程序的设计开发q020基于apriori算法的关联规则挖掘系统的设计与实现q021并行接口器件功能演示的可视化设计学位论文q022基于des加密算法的word加密插件的实现q023某公司职工管理系统的设计与实现q024大随机数生成器算法的研究与实现q025教育报表管理系统-权限管理模块q026某百货店pos积分管理系统-积分添加和通票回收 q0273g的aka协议中f1至f5的ue端的实现q028基于半打开的端口扫描技术及其实现q029某店pos积分管理系统q030信息安全研究所设备管理系统的设计与实现q031vcalendar的跨平台系统的设计q032delaunay算法的实现与应用q033iptables图形管理工具的设计与实现q034木马检测工具的实现q035面向对象的数据建模——数据筛选接口的设计q036基于icmp模拟网络控制软件的开发——控制管理模块 q037教务管理平台-权限及公共模块设计与开发q038信息加密与隐藏工具的设计与实现q039基于icmp模拟网络控制软件开发——接收处理模块 q040 游戏(堡垒)的设计与开发q041一个基于单片机精确计时的电源开关程序的设计与实现q042linux下的简单网络管理控制系统的设计与开发q043一种远程管理linux系统工具的设计与实现q044注册表管理工具设计与实现-秦智q045基于windows平台的个人防火墙设计q046简易代理服务器设计q047基于网络的虚拟实验平台—vlp2p通信库的设计与实现 q048基于bs方式的即时通讯软件的设计与实现q049人机接口设备—led类部件的仿真实现q050smart系统-系统框架设计与开发q051一个windows下基于线路的数据通信程序的设计与实现q052基于linux的远程管理系统服务器端的实现q053excel条件格式化工具的设计与实现q054文档资料管理系统的设计与实现q055基于notes的猎头公司网站的设计与实现q056j2me 游戏的开发q057linux下的网络层加密解密的实现q058linux环境下的密文聊天系统的设计与实现q059网络数据包分析工具的设计与开发q060一个linux下基于线路的数据通信程序的设计与实现q061scheme解释程序的实现q062基于j2me平台的掌上网络商店-服务器端的开发 q063基于cs的电子邮件简单收发系统设计与实现q064无线访问点〔ap〕上的服务重定向问题的研究和实现 q065一个简单木马程序的设计与开发q066内存映射文件在进程共享中的应用研究q067数据采集电路pcb的设计与制作q068基于j2me平台的掌上网络商店——客户端的开发 q069基于纠错码的容错技术的研究——x码的设计与实现 q070基于linux的远程控制技术客户端的实现q071端口扫描与检测技术的实现q072局域网监听系统的设计与实现q073基于进程和通信隐藏的木马设计与实现q074kasumi算法的研究与vc实现q075网络嗅探器的设计与实现q076基于rsa的数字签名的设计与实现q077基于一阶贝塞尔曲线的信息隐藏软件的设计q078一种信息隐藏工具的设计与实现q079基于web的工作计划统计分析系统的设计与实现 q080基于web的工作计划流程管理系统的设计与实现 q081在线英语自学系统——知识库管理的设计q082简单远程控制系统主控端及部分被控端设计q083基于windows入侵检测系统的研究与设计——检测模块设计q084简单远程控制系统被控端的设计q085快速加密解密芯片中kasumi算法的实现q086基于局域网的信息收发系统的设计与实现q087在线英语自学系统——课程及自测管理的设计q088网上鲜花销售系统的设计q089web音乐搜索软件的设计与实现q091互联网论坛监测系统的设计与实现q092基于web的小型公司人事管理系统的设计q093基于windows封包截获的实现q094windows下盗取帐号密码的木马程序的设计q095端口信息工具的设计与实现【篇二:-2013清华大学软件工程学院毕业设计选题表1】2013清华大学软件工程学院毕业设计选题表1 b定做计【篇三:软件工程毕业设计】本科毕业论文〔设计〕题目:火车票预订管理系统的设计与实现学院::学号:专业:班级:指导教师:二0一五年三月目录摘要 ....................................................................................................... (i)abstract ............................................................................................. (ii)1 引言 ....................................................................................................... (1)1.1 项目来源 (1)1.2 项目目标 (1)1.3 任务目标 (2)2 项目规划 ....................................................................................................... . (3)2.1 项目资源 (3)2.1.1 硬件设备 (3)2.1.2 软件环境 (3)2.1.3 软件工具 (3)2.2 项目描述 (3)2.2.1 任务描述 (3)3 系统需求分析 ....................................................................................................... .. 53.1 业务流程分析 (5)3.2 数据流图 (6)3.3 数据字典 (9)4 系统设计 ....................................................................................................... .. (11)4.1 系统功能设计 (11)4.2 系统数据库设计 (12)4.2.1 概念结构设计 (13)4.2.2 数据库表设计 (16)5 系统实现 ....................................................................................................... .. (21)5.1 系统前台 (21)5.1.1 系统首页 (21)5.1.2 用户注册界面 (21)5.1.3 车票预订界面 (23)5.1.4 订票信息界面 (23)5.2 管理员模块 (23)5.2.1 登陆界面 (23)5.2.2 留言管理界面 (25)5.2.3 车次管理界面 (26)5.2.4 订票处理界面 (26)6 系统测试与分析 (27)6.1 软件测试的重要性 (27)6.2 系统实例的研究与选择 (27)7 系统性能分析 (30)总结 ....................................................................................................... (31)参考文献 ....................................................................................................... .............. 32 致谢 ......................................................................................... 错误!未定义书签。
泰和安科技产品技术手册
目录第一节控制器系列 (2)1.SAN030控制器(单回路) (2)040控制器(联动型) (2)400火灾显示盘 (5)第二节探测器系列 (7)1550型点型光电感烟火灾探测器 (7)1400型点型光电感温火灾探测器 (8)1930型手持多功能编码器 (8)第三节手动按钮系列 (10)1705手动报警按钮 (10)1706消火栓报警按钮 (11)1900型声光报警器 (12)第四节接口模块系列 (13)1.SAN1710型输入模块 (13)1711型通用输入模块 (14)3.SAN1800型输入输出模块 (15)1820型广播切换模块 (17)1915型启停转换模块 (18)1726总线隔离模块 (19)1932型总线终端适配器 (19)第五节公共广播系统 (20)第六节电话系统 (21)产品简介第一节控制器系列1.SAN030控制器(单回路)1.概述SAN030型火灾报警控制器是一种单回路产品,其最大地址数为242点,壁挂式结构,可满足各种小型工程及一些大工程中某局部设置的需要。
SAN030控制器图2.特点(1)采用中文LCD显示,操作通过菜单进行;(2)通过菜单可设定探测器灵敏度和工作模式;(3)清洗预报和重码自动识别功能;(4)设置键盘操作权限;(5)具备灵活的自动联动逻辑功能。
3.主机对外接线端子2. LA040控制器(联动型)1.概述LA040型火灾报警控制器(联动型)是我公司推出的新一代火灾报警控制器系列中的一种多回路产品,本控制器兼有联动控制功能特别适合大中型火灾报警及消防联动一体化控制系统的应用。
2.特点(1) 二总线,报警联动一体机;(2) 液晶显示、中文菜单;(3) 具备多种编程接口,实现多种编程方式;(4) 汉字输入采用拼音输入法,大大提高编程效率;(5) 具有程序运行监视和总线对地漏电监测功能;(6) 为不同的操作等级和设备维护设置三个操作级别,避免误操作,使系统安全运行;(7) 清洗预报功能,在光电感烟探测器由于灰尘积累不能正常工作之前,及时向使用者发出探测器清洗预报;(8) 为方便联动手动操作避免菜单启动的繁琐过程,控制器具有配接联动盘对总线联动设备直接启动的功能。
经典逻辑思维名题365道

295分放水晶石 296撞钟时间
298多少格横档
297按劳取酬
299兔子的雌雄概 率
300人和魔鬼
301步行比乘车快多 少
302多功能工具 303未知的生物
304勒索敲诈
1
案
2
305称面粉
3
306小船变身
4
307祖孙三代
5 308聪明的死
刑犯
309没有花钱
1
的饭
310土地和果
2
树
3
311三岔口
0 2
028疯狂飙 车的秘密
0 3
029看报纸
0 4
030燃香计 时
0 6
032有多少 个三角形
0 5
031怎样分 汽车
0 1
033时间的 恶作剧
0 2
034取球
0 3
035聪明的 东方朔
0 4
036扩大水 池
0 6
038爬楼梯
0 5
037井深和 绳长
0 1
039移动火 柴
0 2
040书价
0 3
精彩摘录
这是《经典逻辑思维名题365道》的读书笔记模板,可以替换为自己的精彩内容摘录。
谢谢观看
块
2
091 25个数字
3 092帮他们就
位
4 093巧开储物
箱
5 094出现几次
相同的数字
095直线与棋子
096武士娶到公主的 概率
097称硬币 098奇怪的盒子
100损失了多少钱
099下水道盖子为 什么是圆的
101百米赛跑
102谁偷了佛珠 103最惨的士兵
104怎样随意打开资 料橱
105可疑的短信
SAN030用户简单操作说明

第一章 功能概述及报警处理键盘操作:1.“消音”键用于使控制器火警、故障响声的消除,旁边的指示灯亮提示“已处于消音状态”;2.“复位”键可复位控制器于监控状态;恢复警报前的状态(必须解除警报先,否则复位仍然报警)。
3.“声光警报器启/停”键可对声光警报器进行启/停控制;3.“联动模式选择”键可对联动模式进行更改;1 开机与关机开机:确认交流电源正确连接后,将机内80瓦电源的开关打到左边(ON ),控制器即进入开机过程。
面板上各指示灯进行动态点亮检查。
同时查看“前端设备”的登录情况。
开机工作基本完成,控制器进入正常监控状态,屏幕上部显示“系统监控中···”, 控制器就进入对全系统的周期巡查检测了,如果出现任何问题将自动地进入各 种相应的报警状态(如火警、故障、联动、污染、屏蔽等)。
故障报警包括了总线短路、主备电源、声光警报器、系统故障以及部位的各种 故障。
关机:关机要用钥匙打开机箱才能进行,开箱后将80瓦电源上的开关打向 右方(OFF )。
2 火灾报警 当系统配接的探测器、手报等报警部件确认发现火情时,将报给控制器。
控制器经确认后进入火灾报警状态并发出火警声光警报,此时面板上红色火警 指示灯闪烁,液晶屏上显示首警部位、火警序号及总数、报警部件的编号及类型、报警时间、安装位置等信息(参见图3-1),同时打印机、黑匣子、RS232口输出记录相关火警信息。
处理步骤:当发生火警时应根据控制器的报警信息检查发生火警的部位确认是否有火灾发生 若确认为火灾发生应采取如下措施应建立火灾处理预案(1)启动报警现场的讯响器发出火警声光提示讯响器启动时控制器显示面板的警报启动指示灯点亮通知现场人员撤离,并展开扑救工作。
(2)拨打消防报警电话报警。
若为误报警应采取如下措施(1)首先按“消音”键,控制器报警讯响器将关闭,“消音”键旁边的指示灯亮。
(2)确认误报警原因并排除按复位操作使控制器恢复正常状态。
基于FPGA的HDLC设计实现

基于FPGA的HDLC设计实现李晓娟;黄翌【摘要】根据某雷达的实际要求在FPGA中设计了HDLC协议处理器,并详述了该协议器的设计构想及具体功能模块的实现.该设计采用分块处理的方法使设计简单灵活,适合于系统移植和借用.试验结果证明设计可行有效,可以满足系统要求.同时对主要功能模块进行了仿真和测试,提供了关键结点仿真波形图及部分原代码.【期刊名称】《现代电子技术》【年(卷),期】2007(030)006【总页数】3页(P35-37)【关键词】雷达;HDLC;FPGA;系统移植【作者】李晓娟;黄翌【作者单位】中国电子科技集团第38研究所,安徽,合肥,230031;中国电子科技集团第38研究所,安徽,合肥,230031【正文语种】中文【中图分类】TN951 引言高级数据链路控制规程(High Level Data Link Control,HDLC)是面向比特的同步通信协议,具有差错检测能力强大、高效和同步传输的特点,应用于各种高速数据传输系统中。
实现HDLC通常可采用软件编程或ASIC器件。
软件编程方法功能灵活,通过修改程序就可以适用于不同的HDLC应用。
但程序运行占用处理器资源多,执行速度慢,对信号的时延和同步性不易预测。
软件编程方法一般只能用于个别路数的低速信号处理。
ASIC器件实现方法简单、功能针对性强。
但由于HDLC标准的文本较多,ASIC器件出于专用性的目的难以通用于不同版本,缺乏应用灵活性。
而且,专用于HDLC的ASIC芯片其片内数据存储器(FIFO)容量有限,当需要扩大数据缓存的容量时,只能对ASIC芯片外接存储器或其他电路,使ASIC的简单易用性大大降低。
某雷达要求采用HDLC协议对外传输大量数据,由于系统同时要求在高集成的控制板上完成整机时序、整机控制、信息融合及多类数据传输等功能。
根据实际情况,设计了基于FPGA的HDLC协议控制器。
现场可编程门阵列(Field Programmable Gate Array,FPGA)是采用硬件技术处理信号,又可以通过软件反复编程使用,能够兼顾速度和灵活性,并能并行处理多路信号,实时性能够预测和仿真。
西门子数控系统
第一讲西门子数控系统的基本构成一.西门子840D系统的组成SINUMERIK840D是由MMC,数控及驱动单元(CCU或NCU),PLC模块三部分组成,由于在集成系统时,总是将SIMODRIVE611D驱动和数控单元(CCU或NCU)并排放在一起,并用设备总线互相连接,因此在说明时将二者划归一处.l.人机界面人机交换界面负责NC数据的输入和显示,它由MMC和OP组成.MMC(Man Machine Communication)包括:OP(Operation panel)单元,MMC,MCP (Machine Control Panel)三部分.MMC实际上就是一台计算机,有自己独立的CPU,还可以带硬盘,带软驱;OP单元正是这台计算机的显示器,而西门子MMC的控制软件也在这台计算机中.1.1.MMC我们最常用的MMC有两种:MMCC100.2和MMC103,其中MMC100.2的CPU为486,不能带硬盘;而MMC103的CPU为奔腾,可以带硬盘,一般的,用户为SINUMERIK810D配MMC100.2,而为SINUMERIK840D配MMC103.※PCU(PC UNIT)是专门为配合西门子最新的操作面板OP10、OP10S、OP10C、OP12、OP15等而开发的MMC模块,目前有三种PCU模块--PCU20、PCU50、PCU70,PCU20对应于MMC100.2,不带硬盘,但可以带软驱;PCU50、PCU70对应于MMC103,可以带硬盘,及MMC不同的是:PCU50的软件是基于WINDOWS NT的.PCU的软件被称作HMI,HMI 有分为两种:嵌入式HMI和高级HMI.一般标准供货时,PCU20装载的是嵌入式HMI,而PCU50和PCU70则装载高级HMI.1.2.OPOP单元一般包括一个10.4″TFT显示屏和一个NC键盘.根据用户不同的要求,西门子为用户选配不同的OP 单元,如:OP030,OP031,OP032,OP032S等,其中OP031最为常用.1.3.MCPMCP是专门为数控机床而配置的,它也是OPI上的一个节点,根据应用场合不同,其布局也不同,目前,有车床版MCP和铣床版MCP两种.对810D和840D,MCP的MPI地址分别为14和6,用MCP后面的S3开关设定.对于SINUMERIK840D应用了MPI(Multiple Point Interface)总线技术,传输速率为187.5k/秒,OP单元为这个总线构成的网络中的一个节点.为提高人机交互的效率,又有OPI(Operator PanelInterface)总线,它的传输速率为1.5M/秒.2.数控及驱动单元2.1.NCU数控单元SINUMERIK840D的数控单元被称为NCU(Numenrical Controlunit)单元:中央控制单元,负责NC所有的功能,机床的逻辑控制,还有和MMC的通讯,它由一个COM CPU板.一个PLC CPU板和一个DRIVE板组成.根据选用硬件如CPU芯片等和功能配置的不同,NCU分为NCU561.2,NCU571.2,NCU572.2,NCU573.2(12轴),NCU573.2(31轴)等若干种,同样,NCU单元中也集成SINUMERIK840D数控CPU和SIMATIC PLC CPU芯片,包括相应的数控软件和PLC控制软件,并且带有MPI或Profibus借口,RS232借口,手轮及测量接口,PCMCIA卡插槽等,所不同的是NCU单元很薄,所有的驱动模块均排列在其右侧.2.2.数字驱动数字伺服:运动控制的执行部分,由611D伺服驱动和1FT6(1FK6)电机组成,SINUMERIK840D配置的驱动一般都采用SIMODRIVE611D,它包括两部分:电源模块+驱动模块(功率模块).电源模块:主要为NC和给驱动装置提供控制和动力电源,产生母线电压,同时监测电源和模块状态.根据容量不同,凡小于15KW均不带馈入装置,极为U/E电源模块;凡大于15KW 均需带馈入装置,记为I/RF 电源模块,通过模块上的订货号或标记可识别.611D数字驱动:是新一代数字控制总线驱动的交流驱动,它分为双轴模块和单轴模块两种,相应的进给伺服电机可采用1FT6或者1FK6系列,编码器信号为1Vpp正弦波,可实现全闭环控制.主轴伺服电机为1PH7系列.3.PLC模块SINUMERIK810D/840D系统的PLC部分使用的是西门子SIMA TIC S7-300的软件及模块,在同一条导轨上从左到右依次为电源模块(Power Supply),接口模块(Interface Module)机信号模块(Signal Module)的CPU及NC的CPU是集成在CCU或NCU中的.最多8个SM模块最多四级电源模块(PS)是为PLC和NC提供电源的+24V和+5V.接口模块(IM)是用于级之间互连的.信号模块(SM)使用及机床PLC输入/输出的模块,有输入型和输出型两种.二.硬件的接口1.840D系统的接口1.1.840D系统的MMC,HHU,MCP都通过一根MPI电缆挂在NCU上面,MPI是西门子PLC的一个多点通讯协议,因而该协议具有开放性,而OPI是840D系统针对NC部分的部件的一个特殊的通讯协议,是MPI的一个特例,不具有开放性,它比传统的MPI通讯速度要快,MPI的通讯速度是187.5K波特率,而OPI是1.5M.1.2.NCU上面除了一个OPI端口外,还有一个MPI,一个Profibus接口,Profibus接口可以接所有的具有Profibus通讯能力的设备.Profibus的通讯电缆和MPI的电缆一样,都是一根双芯的屏蔽电缆.X101 操作面板接口(OPI)X102 PROFIBUS接口X112 预留接口(NCU及NCU通讯)X111 SIMATIC接口(IM361)X122 PC MPI接口(MPI)X121 I/O接口(电缆分配盒)H1/H2 错误和状态灯H37段显示S1/S2 复位/NMI按钮S3NCK启动开关S4 PLC启动开关X130A SIMODRIVE 611D接口X130B 数字模块I/O扩展接口(仅限于NCU573)X172设备总线接口X173 PCMCIA插槽(X173)1.3.在MPI,OPI和Profibus的通讯电缆两端都要接终端电阻,阻值是220欧,所有如果要检测电缆的好坏情况,可以在NCU端打开插座的封盖,量A,B两线间的电阻,正常情况下应该为110欧.2.611系列驱动的组成及接口2.1.611系列的驱动分成模拟611A,数字611D和通用型611U.都是模块化结构,主要有以下几个模块组成:o电源模块电源模块是提供驱动和数控系统的电源,包括维持系统正常工作的弱电和供给功率模块用的600V直流电压.根据直流电压控制方式,它又分为开环控制的UE模块和闭环控制的I/R模块,UE模块没有电源的回馈系统,其直流电压正常时为570V左右,而当制动能量大时,电压可高达640多伏.I/R模块的电压一直维持在600V左右o控制模块控制模块实现对伺服轴的速度环和电流环的闭环控制o功率模块对伺服电机提供频率和电压可变的交流电源o监控模块主要是对电源模块弱电供电能力的补充.o滤波模块对电源进行滤波作用.o电抗对电压起到平稳作用.3.611电源模块的接口信号611模块的接口信号有以下几组:(1)电源接口U1 V1 W1 主控制回路三相电输入端口X181 工作电源的输入端口,使用时常常及主电源短接,有的系统为了让机床在断电后驱动还能正常工作一段时间,把600V的电压端子及P500 M500端子短接,这样由于600V电压不能马上放电完毕,还能维持驱动控制板的正常工作一段时间.P600M600是600V直流电压输出端子.(2)控制接口64 控制使能输入,该信号同时对所有连接的模块有效,该信号取消时,所有的轴的速度给定电压为零,轴以最大的加速度停车.延迟一定的时间后,取消脉冲使能63 脉冲使能输入,该信号同时对所有连接的模块有效,该信号取消后,所有的轴的电源取消,轴以自由运动的形式停车.48 主回路继电器,该信号断开时,主控制回路电源主继电器断开.112 调试或标准方式,该信号一般用在传输线的调试中,一般情况接到系统的24V上.X121 模块准备好信号和模块的过热信号.准备号信号及模块的拨码开关的设置有关,当S1.2=ON时,模块有故障时,准备好信号取消,而S1.2=OFF时,模块有故障和使能(63,64)信号取消时,都会取消准备好信号,因此在更换该模块的时候要检查模块顶部的拨码开关的设置,否则模块可能会工作不正常.所有的模块过载和连接的电机过热都会触发过热报警输出.NS1/NS2 主继电器闭合使能,只有该信号为高电平时,主继电器才可能得电.该信号常用来作主继电器闭合的连锁条件.AS1/AS2 主继电器状态,该信号反映主继电器的闭合状态,主继电器闭合时为高电平.9/19/R 9是24V输出电压,19是24V的地,R为模块的报警复位信号.(3)其它辅助接口X351 设备总线,为后面连接的模块供电用.X141 电压检测端子,供诊断和其它用途用."7:P24 ,+24V "45:P15,+15V "44:N15,-15V"10:N24,-24V "15:M,0V电源模块上面有6个指示灯,分别指示模块的故障和工作状态.一般正常情况下绿灯亮表示使能信号丢失(63和64),黄灯亮表示模块准备好信号,这时600V直流电压已经达到系统正常工作的允许值.电源模块正常工作的使能条件:48,112,63,64接高电平,NS1和NS2短接,显示为一个黄灯亮,其它灯都不亮.直流母线电压应在600V左右.3.611驱动控制模块接口信号(1)611D驱动控制模块接口信号:611D控制模块及数控系统主要是通过一根数据总线相连,基本没有太多的接口信号.X431:轴脉冲使能,该信号为低电平时,该轴的电源撤消,一般这个信号直接及24V短接X432:BERO 端子,该接口用作BERO开关信号的输入口.X34,X35模拟输出口,其中有两个模拟口(X1,X2 )用作模块诊断测试用,它可以用来跟踪一些数字量,比如转速,电压和电流等并把它转换成0到5V的模拟电压输出,具体的输出信号可以通过数控系统选择,Ir模拟输出口是固定输出电机R相的电流的模拟值.X411:电机编码器接口,输入电机的编码器信号,还有电机的热敏电阻,其中电机的热敏电阻值是通过该插座的13和25脚输入,该热敏电阻在常温下为580欧,155度时大于1200欧,这时控制板关断电机电源并产生电机过热报警.(1PH7电机温度检测信号连接同1FT6/1FK6电机)X411:直接测量系统输入口,输入直接位置测量信号,一般为正余弦电压信号* 611D的控制板的速度环和电流环的参数设置在NCK里面,故更换控制板后不需要重新设置参数.(2)611A控制模块接口信号611A控制模块及1FT5电机构成伺服驱动机构,完成速度环和电流环的控制,其速度环和电流环的参数都保存在控制板上,故更换该板要注意参数的设置.接口信号如下:X311:电机反馈接口,电机的速度实际值和电机的热敏电阻值都通过它输入到控制板里,1FT5电机的速度检测是通过一个测速发电机来实现的,而电机转子的位置是通过18个霍而元件来检测的.电机内的热敏电阻值是通过该插座的11和12脚信号输入,在常温下小于250欧,当电机内部温度达到155度时电阻大约是1000欧,控制板这时关断电源,并发出报警信号.X321:设定端子,速度的给定值通过该端子的56和14输入,一般来讲,给定值是正负0到10V的电压.X331:使能端子:相应模块的使能信号输入,663是脉冲使能,及电源模块的63作用差不多,只是它仅作用于单个的轴模块.65是控制使能,常常把它和NC侧给定信号的控制使能相连.X341:模块状态输出接口,输出模块的状态信息,如模块准备好信号,报警等.第二讲系统的调试及操作一.840D系统操作l SINUMERIK840D/810D或SINUMERIK FM-NC是机床的CNC控制系统,可以通过CNC控制系统的操作面板执行下列基本功能:•开发和修改零件程序•执行零件程序•手动控制•读入/读出零件程序和数据•编辑程序数据•报警显示和取消报警•编辑机床数据•在一个MMC或几个MMC之间或一个NC或几个NC之间建立通信链接(M:N,m-MMC 装置和n-NCK/PLC装置)用户接口包括:•显示元件,如监测器,LED等;•操作元件,如键,开关,手轮等.l 840D系统具有数控机床具有的自动、手动、编程、回参考点、手动数据输入等功能.•手动:手动主要用来调整机床,手动有连续手动和步进手动,有时为了需要走特定长度时,可以选择变量INC方式,输入要运行的长度即可.•自动:840D的程序一般来讲是在NCK的RAM里执行,所以对MMC103或PCU50来讲,需要先把程序装载到NCK里,但对于特别长的程序,可以选择在硬盘里执行,具体操作方法为:选择加工,程序概要,用光标选择要执行的程序,选择从硬盘执行既可.在自动方式下,如果MMC装有SINDNC软件,还可以从网络硬盘上执行程序.•MDA:MDA跟自动方式差不多,只是它的程序可以逐段输入,不一定是一个完整的程序,它存在NCK里面一个固定的MDA缓冲区里,可以把MDA缓冲区的程序存放在程序目录里,也可以从程序区里调程序到MDA缓冲区来.•REPOS:重定位功能,有时在程序自动执行时需要停下来把刀具移开检测工件,然后接着执行程序,需要重定位功能,操作方法是在自动方式下暂停程序执行,转到手动,移开相应的轴,要重新执行程序时,转到重定位方式,按相应的轴移动按钮,回到程序中断点,按启动键程序继续执行.注意在这个过程中不能按复位键.•程序模拟:840D支持在程序正式运行前进行图形模拟,以减少程序的故障率,但由于MMC 系统的不同,模拟的方法不一样,在MMC103上,程序模拟完全在MMC上执行,故模拟中不会对NCK产生影响,但在MMC100.2上,程序模拟在NCK里面执行,及程序实际执行情况一样,因此在模拟前务必要选择程序测试,如果还要提高模拟速度,还可以选择空运行.二.系统的连接及调试(一)硬件的连接1.SINUMERIK810D/840D系统的硬件连接从两方面入手:其一,根据各自的接口要求,先将数控及驱动单元,MMC,PLC三部分分别连接正确:(1)源模块X161种9,112,48的连接;驱动总线和设备总线;最右边模块的终端电阻(数控及驱动单元).(2)MMC及MCP的+24V电源千万注意极性(MMC).(3)PLC模块注意电源线的连接;同时注意SM的连接.其二,将硬件的三大部分互相连接,连接时应注意:(1)PI和OPI总线接线一定要正确.(2)CU或NCU及S7的IM模块连线.2.检查在正确完成所有机械的和电气的安装工作后即可进行通电,调试工作;而首先要做的就是开机准备工作,它可确保控制系统及其组件启动正常,并满足EMC检测条件全部系统连线完成后需要做一些必要的检查,内容如下:•屏蔽:(1)确保所使用的电缆符合西门子提供的接线图中的要求;(2)确保信号点栏屏蔽两端都及机架或机壳连通.对于外部设备(如打印机,编程器等),标准的单端屏蔽的电缆也可以用.但一旦控制系统进行正常运行,则应不接这些外部设备为宜;如一定要接入,则连接电缆应两端屏蔽.•EMC(Electromagnetic Compatibility)检测条件:(1)信号线及动力线尽可能分开远一些;(2)从NC或PLC出发的活到NC或PLC得线缆应使用SIEMENS提供的电缆;(3)信号线不要太靠近外部强的电磁场(如点机和变压器);(4)HC/HV脉冲回路电缆必须完全及其他所有电缆分开敷设;(5)如果信号线无法及其它电缆分开,则应走屏蔽穿线管(金属);(6)下列距离应尽可能小:--信号线及信号线--信号线预辅助等电位端--等电位端和PE(走在一起)•防护ESD(Electromaqnetic Sensitive Device)组件检测条件:(1)处理带静电模块时,应保证其正常接地;(2)如避免不了接处电子模块,则请不要触摸模块上组件的针脚或其他导电部位;(3)触摸组件必须保证人体通过放静电装置(腕带或胶鞋)及大地连接;(4)模块应北方旨在导电表面上(放静电包装材料如导电橡胶等);(5)模块不应靠近VDU,监视器或电视机(离屏幕勿近及10cm);(6)模块不要及可充电的电绝缘材料接触(如塑料及纤维织物);(7)测量的前提条件--测量仪器接地--绝缘仪器上的测量头预先放过电(二)调试l NC和PLC总清由于是第一次通电,启动,所以有必要对系统做一次总清或总复位.1.NC总清NC总清操作步骤如下:•将NC启动开关S3―→"1";•启动NC,如NC已启动,可按一下复位按钮S1;•待NC启动成功,七端显示器显示"6",将S3―→"0";NC总清执行完成.NC 总清后,SRAM内存中的内容被全部清掉,所有机器数据(Machine Data)被预置为缺省值.2.PLC总清PLC总清操作步骤如下:•将PLC启动开关S4―→"2";=〉PS灯会亮;•S4―→"3"并保持3秒等到PS等再次亮;=〉PS灯灭了又再亮;•在3秒之内,快速地执行下述操作S4:"2"―→"3"―→"2";=>PS灯先闪,后又亮,PF灯亮(有时PF等不亮);•等PS和PF等亮了,S4―→"0";=>PS和PF灯灭,而PR灯亮.PLC总清执行完成,PLC总清后,PLC程序可通过STEP7软件传至系统,如PLC总清后屏幕上有报警可作一次NCK复位(热启动).l 开机及启动第一次启动后,NCU状态显示(一个七段显示器及一个复位按钮S1两列状态显示灯及两个启动开关S3和S4.)(如下图)在确定S3和S4均设定位"0",则此时就可以开机启动了,经过大约几十秒钟,当七段显示器显示"6"时,表明NCK上电正常;此时,"+5V"和"SF"灯亮,表明系统正常;但驱动尚未使能,而PLC状态泽"PR"灯亮,表明PLC运行正常.•MMC:MMC的启动时通过OP显示来确认的,如果是MMC100.2,在启动的最后,在屏幕的下面会显示一行信息"Wait For NCU Connection:××Seconds"如MMC及NCU通讯成功,则SINUMERIK 810D/840D的基本显示会出现在屏幕上,一般是"机床"操作区,而MMC103,由于它是可以带硬盘的,所以在它的背后也有一个七段显示器,如MMC103启动成功后它会显示一个"8"字.•MCP:在PLC启动过程中,MCP上的所有灯饰不停闪烁的,一旦PLC成功启动,且基本程序状如则只有在OB1种调用FC19或FC25,那么MCP上的灯不再闪烁,此时MCP即可以使用.•DRIVE SYSTEM:只有NC,PLC和MMC都正常启动后,最后考虑驱动系统.首先必须完成驱动的配置,对于MMC100.2,需借助于"SIMODRIVE 611D"Start-up Tool软件,而MMC103可直接在OP031上做,然后用PLC处理相应信号即可.这样,系统再启动后,SF灯应灭掉.元素类型含义:复位S1 按钮出发一个硬件复位;控制和驱动复位后完整重起.NMI S2 按钮对处理器发出触发和NMI请求,NMI-非屏蔽中段S3 旋转开关NCK启动开关位置0:正常启动位置1:启动位置(缺省值启动)为值2…7:预留S4 旋转开关PLC模式选择开关位置0:PLC运行位置1:PLC运行P位置2:PLC停止位置3:模块复位H1(左列)显示灯显示灯+5V:电源电压在容差范围内时亮NF:NCK启动过程中,其监控器被触发时,此灯亮CF:当COM监控器输出一个报警时,此灯亮CB:通过OPI 接口进行数据传输,此灯亮CP:通过PC的MPI接口进行数据传输时,此灯亮绿灯红灯红灯黄灯黄灯H2(右列)显示灯显示灯FR:PLC运行状态PS:PLC停止状态FF:当PLC监控器输出一个报警时:此灯亮;当PLC监控器输出一个报警时:所有4个灯都亮FFO:PLC强制状态-:NCU571-573未用,复位时短暂亮NCU573.2:PLC DP状态在CPU315 2DP上此灯有"BUSF"的标记•灯灭:DP未配置或者配置了但所有的从站未找到•灯闪:DP配置了,但一个或一个以上的从站丢失•灯亮:错误(例如:总线近路无令牌通行)绿灯红灯红灯黄灯黄灯H3 七段数码管软件支持输出的测试和诊断信息.启动完成后,正常状态显示"6"840D NCU模块控制和显示元素:l 数据备份在进行调试时,为了提高效率不做重复性工作,需对所调试数据适时地做备份.在机床出厂前,为该机床所有数据留档,也需对数据进行备份.SINUMERIK 810D/840D的数据分为三种:NCK数据、PLC数据、MMC数据有两种数据备份的方法:1.系列备份(Series Start-up):特点:(1)用于回装和启动同SW版本的系统(2)包括数据全面,文件个数少(*.arc)(3)数据不允许修改,文件都用二进制各式(或称作PC格式)种的(DATA):特点:(1)用于回装不同SW版本的系统(2)文件个数多(一类数据,一个文件)(3)可以修改,大多数文件用"纸带格式:即文本格式"做数据备份需以下辅助工具:•PCIN软件•V24电缆(6FX2002-1AA01-0BF0)•PG740(或更高型号)或PC※由于MMC103可带软驱,硬盘,NC卡等;它的数据备份更加灵活,可选择不同的存储目标,以其为例介绍具体操作步骤:•数据备份(1)在主菜单中选择"Service"操作区;(2)按扩展件"}"―→"Series Start-up"选择存档内容NC,PLC,MMC并定义存档文件名;(3)从垂直菜单中,选择一个作为存储目标:V.24 ―→指通过V.24电缆船只外部计算机(PC);PG ―→编程器(PG);Disk ―→MMC所带的软驱中的软盘;Archive ―→硬盘;NC Card ―→NC卡.选择其中V.24和PG时,应按"Interface"软件键,设定接口V.24参数;(4)若选择备份数据到硬盘,则:"Archive"(垂直菜单)―→"Start".•数据恢复MMC103的操作步骤(从硬盘上恢复数据):a:"Service";b:扩展键"}";c:"Series Start-up";d:"Read Start-up Archive"(垂直菜单);e:找到存档文件,并选中"OK";f:"Start"(垂直菜单);无论是数据备份还是数据恢复,都是在进行数据的传送,传送的原则是:1.永远是准备接收数据的一方先准备好,处于接受状态;2.两端参数设定一致.第三讲编程一.坐标系1.工件坐标系工件零点是原始工件坐标系的原点直角坐标:用坐标所达到这个点来确定坐标系中的点极坐标:用半径和角来测量工件或工件的一部分2.绝对坐标:所有位置参数及当前有效原点相关,表示刀具将要到达的位置增量坐标:如果尺寸并非项对于原点,而是相对于工件上的另一个点时,就要用增量坐标.用增量坐标来确定尺寸,可以避免对这些尺寸进行转换.增量坐标参照前一个电的位置数据,适用于刀具的移动,是用来描述刀具移动的距离3.平面:用两个坐标轴来确定一个平面,第3个坐标轴及该平面相垂直,并确定刀具的横切方向.编程时,要确定加工面以便于控制系统能准确计算出刀具偏置值.平面标识横切方向G17 X/Y ZG18 Z/X YG19 Y/Z X4.零点的位置在NC机床上可以确定不同的原点和参考点位置,这些参考点:•用于机床定位•对工件尺寸进行编程它们是:M=机床零点A=卡盘零点,可以及工件龄点重合(值用于车床)W=工件零点=程序零点B=起始点,可以给每个程序确定起始点,起始点是第一个刀具开始加工的地方R=参考点,用凸轮和测量系统来确定位置,必须先知道到机床零点的距离,这样才能精确设定轴的位置:•建立坐标系R1.带机床零点M的机床坐标X B2.基础坐标系(也可以使工件坐标系W)3.带工件零点W的工件坐标系4.带当前被一懂得工件零位位的当前工件坐标系M A W Zl 轴的确立编程时,通常用到以下轴:机床轴:可以在机床数据中设置轴的识别符,识别符:X1、Y1、Z1、A1、B1、C1、U1、V1、AX1、AX2等;通道轴:所有在一个通道中移动的轴,识别符:X、Y、Z、A、B、C、U、V几何轴:主要轴,一般有X、Y、Z;特定轴:无需确定特定轴之间的几何关系,如转塔位置U、尾座V;路径轴:确定路径和刀具的运动,该路径的被编程进给率有效,在NC程序中用FGROUP来确定路径轴;同步轴:指从编程的起点到终点移动同步的轴;定位轴:典型定位轴由零件承载、卸载的加载器,刀库/转塔等,标识符:POS,POSA,POSP 等指令轴(运动同步轴):由同步运动的指令生成指令轴,它们可以被定位,启动和停止,可及工件程序完全不同步.指令轴是独立的插补,每个指令轴有自己的轴插补和进给率连接轴:指及另一个NCU箱连接的实际存在的轴,它们的位置会受到这个NCU的控制,连接轴可以被动态分派给不同的NCU通道PLC轴:通过特定功能用PLC对PLC轴进行移动,它们的运动可以及所有其他所有的轴不同步,移动运动的产生于路径和同步运动无关;•几何轴,同步轴和定位轴都是可以被编程的.•根据被编程的移动指令,用进给率F,使轴产生移动.•同步轴及路径轴同步移动,并用同样的时间移动所有的路径轴.•定位轴移动及所有其它轴异步,这些移动运动及路径和同步运动无关.•由PLC控制PLC轴,并产生及其他所有轴不同步的运动,移动运动及路径和同步运动无关l 编程语言•编程地址及含义地址含义N 程序编号的地址10 程序段编号G 预备功能X,Y,Z 位置数据插补参数F 进给S 主轴速度T 刀具编号D 刀具偏置编号M 杂用功能H 辅助功能•数据类型:类型含义数值范围INT 带正负号的整数±(231-1)REAL 实数(带十进制的分数)±(10-300…100+300)BOOL 由代码确定1个ASSCII字符0 (255)STRING 字符串,在[…]中的字符串,0…255数值的序列(最多为200个字符) AXIS 轴的名称(轴地址) 通道上任意轴的名称FRAME 翻译,旋转,比例和镜像的几何参数•指令:1.G指令G90:参照挡墙坐标系原点,在工件坐标系中编制刀具运行点的程序.G91:参照最新接近点,编制刀具运行距离程序.GO:快速移动使刀具快速定位,绕工件运动或接近换刀点G1:刀具沿及轴,斜线或其他任何空间定位平行的置线移动.G2:在圆弧轨迹上以顺时针方向运行G3:在圆弧轨迹上以逆时针方向运行G4:暂停时间生效(F…以秒为单位;S…用主轴旋转次数确定时间)G17:无刀具半径补偿G18:刀具半径补偿到轮廓左侧G19:刀具半径补偿到轮廓右侧G40:解除刀具半径补偿G41:激活刀具半径补偿,刀具沿加工方向运行至轮廓的右边G42:激活刀具半径补偿,刀具沿加工方向运行至轮廓的左边G53:非模态接触,包括已编程的偏置G54…G57:调用第1到第4可设置零点偏置G94:直线进给率mm/分,英寸/分G95:旋转进给率mm/转,英寸/转2.M指令M0:编程停止M1:选择停止M2:主程序结束返回程序开头M30:程序结束M17:子程序结束M3:主动主轴顺时针方向旋转M4:主动主轴逆时针方向旋转M5:主动主轴停止M6:换刀指令3.其它F:进给率S:主动主轴的速度(单位:rev/min)T:调用刀具D:刀具偏置号(范围:1…32000)。
板卡式固态硬盘
板卡式固态硬盘下文是关于板卡式固态硬盘相关内容,希望对你有一定的帮助:【一】:嵌入式板卡M0310——Modbus转HART模块 符合协议标准符合标准Modbus- RTU协议支持Modbus通信参数动态配置支持6个设备变量、4个动态变量板卡尺寸65mm(长) *42mm(宽)M0306——Modbus转DP模块 符合PROFIBUS DPV0协议~12M波特率自适应MODBUS-RTU主站符合标准MODBUS-RTU协议与MODBUS-RTU从站的电气接口为TTL电平 通过拨码开关可设置PROFIBUS地址通过GSD文件中提供的参数配置MODBUS-RTU 从站 板卡尺寸65mm(长) *42mm(宽)M0307——Modbus转PA模块 符合PROFIBUS PA 协议标准符合标准Modbus-RTU协议支持Modbus通信参数动态配置支持AI、AO、DI、DO和PID等多种功能块 最大支持8通道AI、AO、DI、DO板卡尺寸65mm(长) *42mm(宽)M0313—Modbus转FF模块 符合标准Modbus-RTU协议支持Modbus通信参数动态配置支持功能块的实例化支持AI、AO、DI、DO和PID等多种功能块 最大支持8通道AI、AO、DI、DO板卡尺寸65mm(长) *42mm(宽)_板卡式固态硬盘。
同尺寸同接口易升级沈阳中科博微自动化技术有限公司【二】:2015年8月中国固态硬盘市场研究报告2015年8月中国固态硬盘市场研究报告三星领跑品牌关注度排行榜2015年8月的中国固态硬盘市场三星、影驰和浦科特继续领跑,三星产品受欢迎。
大容量固态硬盘新品不断推出,价格也有下降趋势。
SATA接口是市场的主流,容量为256GB 内存的单G价格最低。
三星领跑品牌关注度排行榜2015年8月中国的固态硬盘市场中,三星以%的关注比例继续领跑,影驰和浦科特获得第二和第三,关注比例分别为%和%。
金士顿的关注度比例为%排名第四,与第三名的浦科特仅仅只有%的差距。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
140M—VC4
HOA:高阶组装器(HPT、HPA)
VC12—VC4
LPC:低阶通道连接功能块
对VC12、VC3的交叉矩阵 仅选择路由,不处理信号
10. LPT:低阶通道终端
LPOH源和宿 对低阶VC12进行实时监控
30
低阶通道终端功能块LPT
正常 解扰 处理E1、D1-D3
校验B1 RS-BBE
16
再生段终端功能块RST
发方向 C→B
写RSOH
加扰 STM-N帧
计算B1
加入E1 D1-D3
17
复用段终端功能块MST
收方向 C→D
提取APS信令 K1、K2(b1-b5)
检测K2(b6-b8)
检测B2
110 MS-RDI
111 MS-AIS D点信号“1”
20
复用段适配功能块MSA
收方向 E→F
消间插 AUG→ N×AU-4
解读指针 AU-PTR
H1H2H3全“1” AU-AIS F点信号全“1”
无效指针 8个NDF AU-LOP→F“1”
21
复用段适配功能块MSA
发方向
写指针 AU-PTR
字节间插 N×AU-4→AUG
2. SPI、RST、MST、MSP、MSA组成复合功能块TTF
REG
STM-N STM-N
5
SDH网络常见网元
4. 数字交叉连接设备 DXC 兼有同步复用、分插、交叉连接、网络的自动恢复与保护等多项 功能的SDH 设备。
SDH支路信号 STM-N
DXC
STM-N
PDH支路信号
6
逻辑功能块
SDH网络常见网元
SDH网络拓扑结构
SDH设备逻辑功能块 告警流程图
7
SDH SDH网络拓扑结构 网络拓扑结构 . 线形网
TM ADM REG ADM TM
. 树形网
TM ADM REG ADM TM
8
ADM
TM
SDH SDH网络拓扑结构 网络拓扑结构 . 环形网
ADM
ADM
ADM
ADM
9
SDH SDH网络拓扑结构 网络拓扑结构 . 枢纽网
TM TM ADM DXC REG ADM TM ADM TM
STM-N光信号——N×VC4
22
逻辑功能块
3.
HPC:高阶通道连接功能块
对VC4的交叉矩阵 仅选择路由,不处理信号
4.
HPT:高行实时监控
23
高阶通道终端功能块HPT
收方向 F→G
检测B3 不符 HP-BBE
检测J1 失配HP-TIM G点全“1”
检测C2 失配HP-SLM 00H HP-UNEQ
H4传给 HPA
G点全“1”
24
高阶通道终端功能块HPT
发方向 G→F
写HPOH
G1→HP-REI 收HP-BBE时
G1→HP-RDI 收HP-TIM、HP-SLM HP-UNEQ
25
逻辑功能块
5. LPA:低阶通道适配功能块
包封/拆包封:PDH—C
6. PPI:PDH物理接口功能块
设备与PDH线路接口 提取PDH支路定时信号 码型变换:NRZ—HDB3、NRZ—CMI
26
PDH物理接口功能块PPI
PPI
收方向 L→M J→K
发方向 M→L K→J
码型变换
码型变换 提取定时
无输入信号 T-ALOS、P-LOS EX-TLOS
27
高阶通道适配功能块HPA
3
SDH网络常见网元
2. 分插复用器 ADM 设在网络的中间局站,完成直接上、下电路功能。
OAM 西侧线路信号 东侧线路信号
ADM
STM-N STM-N
PDH支路信号 SDH支路信号
4
SDH网络常见网元
3. 再生器 REG 设在网络的中间局站,目的是延长传输距离,但不能上、下电路
OAM 西侧线路信号 东侧线路信号
收方向 G→H
消间插 C4→TU12
处理指针 TU-PTR、TU12→VC12
V1V2V3“1” TU-AIS H点全“1”
无效指针 TU-LOP H点全“1”
28
高阶通道适配功能块HPA
发方向 H→G
写指针 TU-PTR、VC12→TU12
字节间插 TU12→C4
29
逻辑功能块
7. 8. 9.
13
逻辑功能块
w STM
TTF
A
SPI
B
RST
C
MST HOI
D
MSP
E
MSA
F
140Mb/s
G.703
M PPI
L
LPA
G
HPT
F
HPC
LOI 2Mb/s 34Mb/s G.703 K PPI
HOA
J LPA I LPT H LPC H HPA G HPT
F
注:以2Mb/s为例 SEMF OHA OHA接口 MCF N D1—D3 Q接口 F接口
逻辑功能块
V1.1 V1.1
光通信D&T团队
课程大纲
SDH网络常见网元
SDH网络拓扑结构 SDH设备逻辑功能块 告警流程图
2
SDH网络常见网元
1. 终端复用器 TM在线形网的端站,把PDH / SDH 支路信号复用成SDH线路信 号,或反之。
OAM 线路信号
TM
STM-N
PDH支路信号 SDH支路信号
LPT
收方向 H→I
发方向 I→H
检测V5 LP-BBE LP-TIM、LP-SLM,LP-UNEQ
写LPOH 收LP-BBE→LP-REI 收LP-TIM、SLM→LP-RDI
31
逻辑功能块
LPT、LPA、PPT组成LOI,功能2M、34M—VC12、VC3
11. SEMF:同步设备管理功能块
本设备各功能块的监控 其他设备间OAM信息互通
告警流程图
34
RST LOS/LOF (J0) (B1) (K2) (B2) (M1) (K2) RS-TIM BIP Err. MS-AIS MS-BIP Err. MS-REI MS-RDI "1"
MST
MSA
HPT
HPA
LPT
AIS
"1"
AIS
AU-AIS AU-LOP HP-UNEQ HP-TIM
12. MCF:消息通信功能块
提供网管f&Q接口 提供D1-D3、D4-D12接口
32
逻辑功能块
13. SETS:同步设备定时源
提供本地时钟 输出本地时钟
14. OHA:开销接入功能块
公务开销的接入:E1、E2、F1
33
逻辑功能块
SDH网络常见网元 SDH网络拓扑结构 SDH设备逻辑功能块
TM
TM
10
SDH SDH网络拓扑结构 网络拓扑结构 . 网状网
ADM ADM
ADM
ADM
11
逻辑功能块
SDH网络常见网元 SDH网络拓扑结构
SDH设备逻辑功能块
告警流程图
12
逻辑功能块
背景
SDH设备统一的接口 不同厂家的实现的方式千差万别 ITU-T规定统一的基本功能块标准
"1" "1" AIS
(C2) (J1) (B3) (G1) (G1)
HP-BIP Errr. HP-REI HP-RDI TU-AIS TU-LOP LOM HP-SLM LP-UNEQ LP-TIM LP-BIP Err. LP-REI LP-RDI LP-SLM "1" AIS "1" AIS "1"
(H4) (C2) (V5) (J2) (V5) (V5) (V5) (V5)
表示产生出相应的告警或信号 表示检测出相应的告警
35
逻辑功能块
R-LOS R-LOF
MS-EXC
MS-AIS
AU-LOP
AU-AIS
HP-UNEQ
HP-TIM
HP-SLM
TU-AIS
36
37
P D4—D12 SETS
SETPI
外同步 14
TM设备的典型功能块的组成
逻辑功能块
SPI 同步设备 物理接口
收方向 A→B
发方向 B→A
O/E 提取线路定时
失效 RLOS
E/O变换
15
再生段终端功能块RST
收方向 B→C
RLOS C点信号 全“1”
定帧 A1、A2
失败 ROOF、RLOF C点信号“1”
不符 MS-BBE
越限 MS-EXC(B2) D点信号“1”
18
复用段终端功能块MST
发方向 D→C
写MSOH
M1→MS-REI 收MS-BBE时
K2→110 MS-RDI 收MS-AIS时
19
逻辑功能块
1. MSP:复用段保护功能块
进行复用段保护倒换 启动条件LOS、LOF、MS-AIS 不倒换时,信号透明传输 1+1、1:1、1:n