液压比例技术在钢管步进梁式再加热炉的应用
步进式加热炉液压系统分析

料撼毒
步进式加热炉液压系统分析
孙林 沧州中铁装备制造材料有限公司
河北沧州
0 6 1 1 1 3
【 摘要 】现 代化 的钢坯加热 炉不 断向大型化 、 高度 自 动化的方 向发 原理 图如 上图所 示: 展, 在耗 能、 环保、 加 热质量等方面也提 出了 更高的要求 。 步 进 式加热 炉以 步进梁 的升 降运 动 : 步 进梁 的上 升和下 降是通 过二支并联 液压缸 其灵活的加热方式、 加热质量 好, 炉长不受限制、 操作方便、 易于实现 自 动 驱动的 , 液压缸 推动带 匕 下轮组的 提升框架沿 斜轨道 上升和下降 , 使水 平框 架及步进梁 随之作 垂直升 降运动 , 在此过 程中, 水平缸被锁 定。 升 控制等优 点, 被愈来愈多 新建的轧钢加热炉采用。 降行程2 0 0 mm。 步进 粱 的水平运动 : 步进 粱的水平运 动是 通过一支液 压缸 驱动的 , 它直接作用在水平框 架上 , 使 水平框架及步进 梁在提升框 现代化的 钢坯加 热炉不断 向大 型化 . 高度自动化的 方向发 展, 在耗 架 上层滚轮 上作平移运动 , 在此 过程 中, 升降液 压缸被锁 定。 进退行程 能, 环保 、 加热 质量等方面 也提 出了更高 的要求。 步进 式加 热炉 以其 灵 为6 0 0 mm。 其中提升与平移各有一条油缸带有线性位移 传感器, 用于检 活的加 热方式 加 热质量好, 炉长不受限制、 操作方便、 易于实现 自 动控 测位移 的距离。 如图分析运动 顺序 : 制等 优点 , 被愈来 愈多新 建的轧钢加 热炉采用 。 步进 式加 热炉步进机 构通常按矩 形轨迹运 动, 一个 运动周期 由4 个 控制信号, 经比例放大器驱动比例阀的动作。 动作组 成 : ( 1 ) 活 动梁上升, 托起 料坯 t ( 2 ) 活动梁 及料 坯按设 定好的步距 1 、 步进机 构进退 : 进退控 制阀组 主要 由电液 比例换 向阀和辅助 阀 前进一定 距离 , ( 3 ) 活动梁下降 , 将料坯 放在 固定梁 上 ; ( 4 ) 活动粱水平移 件组 成 , 控制 平移液 压缸 驱动步进 机构进退 的准确 运行, 并可抑制高 压 动退 回起始 位置。 冲击和 漂移。 P L C 按 控制 曲线输 出模拟量 控制信号, 经比例放大 器驱 动 根据轧钢生 产工艺, 要求加热炉 步进梁具 有以下特点: I 、 步进动作 比例阀 的动 作。 系统 采用了三位四通的换 向阀进行控 制, 步进 梁升降时 周期 要控制 在一定 的范围内并且速 度周期 均为可调。 2 、 步 进梁升 降过 液 压锁处于 锁定状 态 。 动作时 比例阀给 出信号 打开液 压锁 , 液 压缸 内 程 中要能实 现对被加 热料坯的轻 托轻放 , 满足活动梁启停均 匀, 变速流 活塞一 侧压 力上升 , 转化成 动能驱 动活动梁 移动。 负 载增大 时, 反映到 畅等要 求。 3 、 加热炉 整炉钢 坯重可达5 0 0 吨, 要求步进 梁要有足够的载 液压缸 活塞高压侧压力上升, 压力补偿器通过高压侧先导 阀控制 比洌换 重。 4 、 活 动梁 在 运动过 程中 负载 变化极 大 , 恒 压液 压 系统 负载 对速度 向阀P 3压 力, 1 对压 力进 行补偿 以稳 定运 行速 度。 使速度 的控制 只与 比 3 有关, 而与负载的 变化无关 , 实现加 热炉运 行平稳 、 速 势必会产生影响 , 必须采取有效措 施避免步进梁 的运行速 度出现 波动。 例方 向阀的开 1 5 加热炉 对板坯的加 热, 要求 由先进 的自 动化 程序进行控制 。 度稳定 的效果 。 液压 传动 因其体积 小 、 负荷大 、 易于实现 机 电一体 化控 制等优 势 , 2 、 在 升降 的过 程中, 由于 是 三通 式进 1 3P 压 力补偿 器控制 系统压 在步 进式 加 热炉 中有 广泛 的应 用 本文 以河北省 沧州 中铁 装备 制造材 力 , 实现 了 负载 与压 力相适 应控 制。 原理 与平移相 同, 唯 一不 同的是 为 料有限 公司1 2 5 0 线步进 式加 热炉 为例 , 对 步进 式加 热炉 液压 系统运行 了设备 安全 , 防止 突发事件 导致 液压停 止时活动 粱掉 落 , 增加了F D型 特征进行分 析, 以利于处理分析设 备故障。 平衡 阀。 因升降缸 负载 远远大于 平移缸 , 所以升降缸 采用大液 压缸 , 所 步进梁 周期动作为 : 步进梁上升 ( 给 定信号 一低速 上升 一 加 速一定 需液 压流量较大 , 单 向阀采用插装 式开关 阀, 以实现平移 时升 降缸的锁 速一中间减速一中间定速 一中间加速 一定速 一减 速一停止) 一步进梁前 定 。 系统平滑 的启动和 制动是靠 电气控制 来实现 的, 系统是靠 特定的输 进( 给定信号 一低 速前进 一一 次加速 —二次加 速一定 速一一次减 速 二 入信号对整个 运动过程 加 以控制 , 当输入信号 的变化 曲线给定后 , 平 台 次 减 速一停止 ) 一步进梁下 降 ( 给 定信号 一慢 速下 降一加速 一定 速一中 的运动 曲线也随 之确定, 而与负载的变化无关。 该套 系统易 出现 的问题及 处理方 法 : 1 、 出现 出钢跑偏现 象及钢结 间减 速一中间定 速一中间加速 一定速 一减 速一停止 ) 一步 进梁后 退 ( 给 定信号一低速后退 一一次加速—二次加速一定速一一次减速 二次减速 构脱焊 变形、 裂口、 移 位等情 况。 2 、 出现油缸冲顶现象 表现为 比例换 向 俜 | J 上 ) 。 阀给信 号后仍维 持原动作直 到液压缸 到达机 械限 位。 3 、 升降启动阶 段 震动异 响现 象。 4 、 步 进梁到位后 自动下滑现 象。 升晔灌压缸 进逞灌压缸 分析原因: ¥ . n o /  ̄o - l l s o ● — ● ∞ l 、 问题 1 主要 是因为炉底 机械 升降 液压缸 不同步造 成升 降框架在 升降 过程中产生横 向位移 , 两条纵梁 在运行过程 中升降定心 导板受固定 台升 降定 心导 板侧向作用力 , 使 靠近 升降框 架定 心导板 部位 的纵粱长 期受较 大的横向力矩, 造成 该部位的纵 梁横断面多处裂 纹。 原 因主要 有 以下两方面a 油缸 的密 封损坏 , 油缸 内泄外部泄漏 ; b 油 缸的支座松动 或 支撑 轴承损坏 ; 解决对 策: 1 ) 定期 的检查油缸 的泄漏情况 , 定期更换 油 缸, 确 保密封性能 , 2 ) 使用摩 擦性 能优良的密封结 构和密封材 料; 3 ) 保 证各关节点润滑 良好 , 保持 较小 的间隙; 4 ) 长期 跟踪 框架运 行状态 , 定
加热炉步进液压系统设计与应用

Vo .9. . 1 2 No 5 Oco e 0 7 tb r 2 0
双 管 板 插 入 件 换 热 器 的设 计 及 应 用
0=
出料侧
20 6
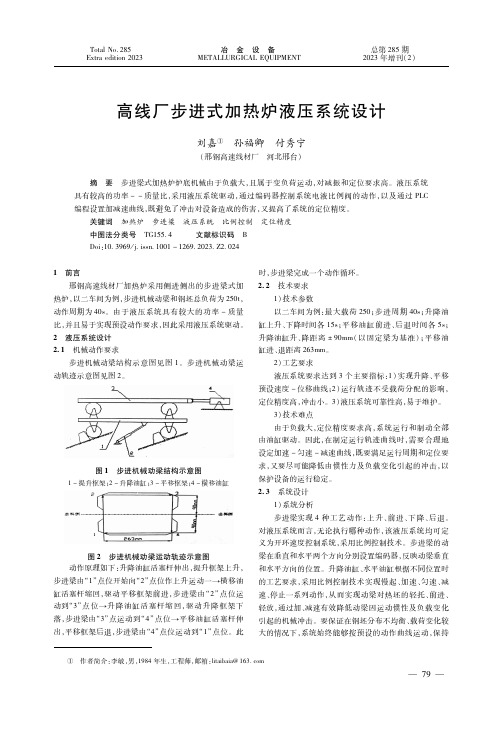
图 2 步 进 机 械 动 梁 运 动 轨 迹 示 意 图
动 作原理如 下 : 升降油缸 活塞 杆伸 出 , 步进梁 由 “” 1点位 开始 向“ ” 2点位 作上 升运动一 平移 油缸活 塞
杆缩回驱动平移框架前进 , 步进梁 由“” 2点位运动到
“”点位一 升 降油缸活 塞杆缩 回,驱 动升 降框 架下 3 落 , 进梁 由“” 运动 到 “” 位一 平 移油 缸 活塞 步 3点 4点 杆 伸出 , 平移框 架后 退 , 进梁 由“ ” 步 4点位 运动 到“ ” 1 点位 。此 时 , 进梁完成 一个动作 循环 。 步
3 ; 降油缸 升 、 4s升 降时 间各 约 1 ; 0s平移 油 缸进 、 退 时 间各 约 7 ; 降油缸 升 、 升 s 降距 离 ±10mm( 固定 0 以 梁为基 准 )平移 油缸进 、 ; 退距离 ±20m 8 m。 222 工艺要 求 -. 液 压 系统 要 求 达 到 3个 主 要 指 标 :) 1实现 升 降 、 移 预设 速度 一位移 曲线 ;) 平 2运行 轨 迹不受 载荷分 配的影 响 ;) 3 液压系 统可靠 性高 , 易
收 稿 日期 :0 6 1 — 4 20— 20
( A L M) 1a / ) , 4x x /x / x( + l2/ E 2 2
式 中 为液压 油弹 性模量 ;A 为油 缸无 杆腔 面积 ;
为油 缸行程 ;M 为 当量质量 ; 仪 为 油缸有杆 腔与
无杆 腔面积 比 。
图 1 步进 机械 动梁 结构 示意 图
比例液压技术在2~#步进梁改进中的应用

… {
} I
_ l r— 一
— —
l
l
1-- - 一
0卜—
l
}
进梁 的升 降 , 移运 动均 由 比例 阀 方 向阀 控 平
制, 因此减 小 系统 运 动振 动 、 冲击应 该 是相 对 容易 的事情 。 钢 卷通 过 步 进 梁 传 输 , 于 典 型 的 “ 属 质
步进 梁在 平移 过 程 中一 直存 在运 动 冲击 、 抖 动和定 位不 准 等 现 象 。此 前 经 过 换 缸 、 阀 换
等处置 方式 未 能 得 到解 决 , 过应 用 比例 液 通
压 技术 改进控 制信 量 , 解决 了此 问题 。
图 1 比例 阀运 动 控 制 过 程
2 分 析
的 O G 系统 ( niedt a eigS s m) D O l a G t r yt n a h n e
信号做 出以上 改 变后 , 进 梁 平 移运 动 冲 2步
击 、 动立刻 得 以消 除 。 振
证实平 移运动 比例方 向阀 的原 控制信 号确 为 阶跃信号 。
带 压力补 偿 的 比例液 压系统完 全 能满 足
|帖 】 i
。
步进梁 “ 启停平 稳 、 轻托 轻 放 ” 送 钢 卷 的性 输 能要求 。应用 恒 压 比例 、 服 液 压技 术 提 升 伺 其他设 备性 能 , 仍有 较大空 间 。
参考文 献
1 张德明. 比例 液 压 系 统 在 高速 线 材 加 热 炉 步进 梁 控 制 中
计『] J .江 苏冶 金 ,0 3 ( . 2 0 .5)
止位直 接停止 见 图 4 此种 方式仍 会存在 一 ,
基于电液比例技术的步进加热炉速度控制系统

出, 局部泵控改造优于开式 系统改造 。泵控方案的特 点是土建不动, 电控系统稍作变动 , 便可保证其电气控
制系统程序不变。电液 比例控制双向变量的泵控方案
简化了流量控制 回路 , 使流量控制 回路十分简单 , 并使
主泵具有互换性 , 与原系统的电控系统及工艺无关 , 使
进, 流量调节更为简单 、 实用 、 可靠 。 3 改造后液压系统 改造后的步进梁液压系统和改造前一样 , 3 由 个 子系统组成 。主要改造的是主泵组部分 。如图 2所示 为主泵组的液压原理图。
许长时间停炉改造 , 所以提出了以下改造基本原则 : () 1 技术先进 , 成熟可靠 , 确保 系统应有 的技术指
v riyPrs ,1 9 est es 9 0
行技术改造 。
收稿 日期 :060 .5 2 0 52
作者简介 : 傅连东(95 , , 16一)男 湖北黄冈人, 副教授 , 博士 , 主要 从事液压伺服 系统及智 能控制 的教学 和科 研工作 。
—
4 5. 5
[] 姜万录, 6 张淑清 , 王益群 。 混沌运动特征的数值
1 概 述
采钢厂步进加热炉原液压系统是 18 年 由国外 98 引进的 , 该液压系统 由动力系统、 控制系统 、 循环系统 3 大部分组成 , 中动力系统 为步进梁液压 系统的核 其
心。此系统有 4 台主泵 , 中 3台泵工作 1台泵备用 。 其
加热炉步进梁 的速度控制 , P C控制动力系统的 3 由 L
摘 要: 该文针对武钢热轧厂步进加热炉液压 系统存在的问题 , 根据工厂提 出的改造原则 , 了在步 确定 进加热炉速度控制 系统中采用电液 比例技术的改造方案 , 实际应用后取得 了满意的效果。 关键词 : 步进加热炉;电液 比例控制 ; 液压 系统
加热炉步进梁液压系统应用与日常维护

加 热 炉 步 进 梁 液压 系统 应 用 与 日常维 护
张建康
( 酒泉钢铁( 集团) 有 限责任公司 炼 轧厂 , 甘肃 嘉峪关 7 3 5 1 0 0 )
摘
要: 叙述 了加热炉步进梁液压系统工作原理及维 护处理方 法。加热炉 液压 系统是如何 完成动作 和检查 调整 ,
在 日常的运行 维护 中如何控 制 , 如何预防 ; 确保在现场使用 中的安全顺行 , 以及液压系统 与 电器 系统 如何维护及基 本原 理 , 在设备管理与操作方面对液压系统的影响 。加热 炉步进梁 液压在 步进式 的传动 中得到广泛 应用 , 它既 节 能, 又有 良好 的稳定性 。 关键字 : 逻辑 阀; 电液 比例阀 ; 油缸 ; 电磁阀 ; 步进梁
Ab s t r a c t :T h i s p a p e r d e s c r i b e s i n d e t a i l t h e w o r k i n g p r i n c i p l e a n d ma i n t e n a n c e me t h o d o f t h e h y d r a u l i c s y s t e m i n t h e s t e p —
第3 6 卷第 1 期
2 0 1 4年 2月
甘
肃
冶
金
V0 1 . 3 6 No . 1 F e b . 。 2 0 1 4
GANS U METALLURGY
0 1 4 ) o l 一 0 0 9 8 — 0 3
步进加热炉液压升降系统改造
I mp r o v e me n t o f Hy d r a u l i c L i f t i n g S y s t e m f o r Wa l k i n g B e a m F u r n a c e
a n d ma i n t a i n a b i l i t y o f t h e s y s t e m a n d r e d u c e t h e e q u i p me n t f a i l u r e a n d f a u l t p r o c e s s i n g t i me . Ke y wo r d s :wa l k i n g b e a m f u r n a c e ,h y d r a u l i c l i f t s y s t e m ,c a r t r i d g e v lv a e
退 四个动作。其中升降缸液压系统可靠性的高低 , 对 步进 式 加热 炉正 常生产 有严 重影 响 。以下对 某厂 步进 式加热炉的升降缸液压系统在生产中常见的故障进行 分析 , 针 对其 使用 和维 护 中存 在 的不 足 , 提 出 了改 造 的 技术措施 , 以达到提高设备可靠性的 目的。
2 .D a c h e n g Hy d r a u l i c T e c h n o l o y g C o mp a n y ,C h e n g d u , S i c h u a n 6 1 0 3 0 5 )
Ab s t r a c t :I n t h e s t e e l p i p e p r o d u c t i o n l i n e ,t h e s t e e l t u b e s a r e h e a t e d b y t h e w a l k i n g b e a m f u r n a c e .T h e p r i n c i p l e
步进梁加热炉液压系统浅述及故障分析

·技术分析·步进梁加热炉液压系统浅述及故障分析保骏①(中冶华天工程技术有限公司 江苏南京210019)摘 要 在轧钢生产中,步进梁加热炉是生产过程中的主要设备。
本文介绍了步进梁液压系统并针对常见故障进行了分析,让读者了解了故障发生的原因、分析了故障解决的方法。
通过本文的介绍为提高加热炉液压系统控制及维护水平提供了借鉴。
关键词 步进梁加热炉 液压系统 故障中图法分类号 TH137 文献标识码 BDoi:10 3969/j issn 1001-1269 2023 Z1 013HydraulicSystemofWalkingBeamHeatingFurnaceIsBrieflyDescribedandFaultAnalysisBaoJun(HuatianEngineering&TechnologyCo.,Ltd.,Nanjing210019)ABSTRACT Insteelrollingproduction,walkingbeamheatingfurnaceisthemainequipmentintheproductionprocess.Thispaperintroducesthehydraulicsystemofstepperbeamandanalyzesthecommonfaults,sothatreaderscanunderstandthecausesofthefaultsandanalyzethemethodstosolvethefaults.Theintroductionofthispaperprovidesareferenceforimprovingthecontrolandmaintenanceleveloftheheatingfurnacehydraulicsystem.KEYWORDS Walkingbeamheatingfurnace Hydraulicsystem Fault1 前言步进梁加热炉是轧钢生产中的重要环节。
步进式加热炉电液比例液压系统的设计

h d u i p o ot n lh d a l r p rin l h d a l y t m o e rh me h nc ld ii g Any i o r l cr — y r u i p o o t n y r a e r p r o a y r u i p o o o a y r u i s s l i c t c e fr h a t c a ia r n . v l s f e e to h d a l s c r p ri a ol s se y t m a d i y ia ic i o l i g b a f r a e h s b e o e T i tc n lg i b v l e t f r e d v l p d a d n t tp c c ru t f wak n e m u n c a e n d n . h s e h oo y s e au d o u t r e e o e n s l h s o l b x e d d fr i i f ce c , lw o t n f e e fr n e h u d e e t n e o t h g e e in y o c s s a d i p r ma c . n o
结合 宽 厚板 轧线 加 热炉 液压 系 统设 计要 点 ,对 电液 比
例 控制 的液 压 系统 及典 型 回路 进 行分 析 ,简 要 阐述 其 原理 , 为进 一步推 广应 用该 技术提 供参 考 。
液 压 气 动 与 密 封 /0 1年 第 1期 21
步进式加热炉 电液 比例 液压 系统 的设计
吴 世锋
( 京华 德液压 成套设 备 分公 司 , 北 北京
摘
10 6 ) 0 1 5
要 : 进 炉 作 为 高速 线 材 、 材 、 步 棒 及板 材 轧 线 的 主 要 设备 之 一 , 炉底 机 械 驱 动 部 分 为 电液 比例 液 压 系 统 。对 步 进 炉 炉 底 机 械 电 液 比
加热炉步进梁液压系统分析及改造

收稿 日期 介 : 鄢勇( 94 ) 男 , 18 一 , 湖北天 门人 , 士研究生 , 硕 主要
从事液压传动与控制方面 的研究工作。
7 4
液 压 与 气动
2 1 第 1期 0 1年
阀 7和 A 阀流 回油箱 , D 此时 系统 供油 量减小 , 油缸 的 运 动速 度逐 渐变 小 。 当 电磁 阀 4的 电磁 铁 a得 电 时 , 控 制油 通过单 向节 流 阀 3进 入 到 A D阀 的右 腔 , 阀 使 芯 由中位逐 渐过 渡 到 右 位 , 过 A 阀流 人 油 箱 的油 通 D 减 少 , 时 系 统 供 油 量增 大 , 缸 的运 动 速 度 也 随之 此 油
增大。
目前 , 2号加 热 炉步 进 梁 液 压 系 统 和 电气 自动 化 系统 已经运行 3 0多年 , 分液 压元件 、 部 设备 已经 老化 、
磨损 , 而且厂 家 已不 再 生产 , 以补充 备件 。导 致液压 难
系统效 率低下 , 热量 大 , 发 运行 状 态 不 稳定 。采用 A D 阀 、 限开关 和时 间继 电器进行 控制 , 极 控制 方式 落后且 精 度低 , 已不 能满 足 当前 生 产要 求 。针对 2号 加热 炉 步 进梁 液压 系统在 实 际 生产 中暴 露 的 问题 , 轧 厂决 热 定 对该 液压 系统 、 电气控 制部分 进行 升级改 造 。
断 电时 , 液压缸 快速 下降 , 发生重 大事 故 。
5 电气 控制 系统方 案分 析 电气 控制 部分 的改造 主要是 更换相 应 的 电气控 制 设备 , 写新 的控制程 序 , 编 以提 高系统 的控制 精度 和 自 动化 程度 。改 造后 步进梁 运动速 度 的变化 由液压 系统 中的 比例 阀 的控制来 实 现 , 步 进梁 的运 动极 限位 置 而 以及 运动 速度 改变点 分别 由升 降缸和平 移缸外 置 的线
硅钢步进梁式加热炉液压系统改造

空 间 圆柱 凸轮 机 构 在自动机 械 中有 着广泛 的 应 用, 与平面 凸轮机 构相 比,具有 体积 小 、结 构紧凑、刚性好、分 度数大和传动扭矩大等优点 !1"。 但圆柱凸轮的廓面是复杂 的空间异型曲面,所以其设计计算较繁杂。 目前所生产的 圆柱凸轮机 构 大 多是圆柱滚子从动 件, 该 种 机 构 对 误差 十分敏感 !2",其廓面不可展给廓面修形造成了极大的难度, 使机 构 的啮合 在 边缘接触、 点 啮合 与线啮合之间交替 进 行,机构的动态性能差,寿命难以保证 !3"。而双曲线滚子圆 柱凸轮机 构通过 改变双曲线方 程 , 基本可 以实现 螺旋 线 接触,有利 于机构动态性能和使用寿命的提高 。 为此 本文 运用包络 原理及 旋转 变 换矢 量, 开展了双曲线滚子圆柱 凸轮机 构廓面方 程和 啮合 方 程 的讨 论, 对于 提高 机 构 对 误差的包容性及改进现有圆柱凸轮机构有所帮助。 # 单参数曲面族理论 设在三维笛卡儿坐标系中,单参数曲面族 }可表示为 { S! x=x ( z,w,!) { S !}: y=y ( z,w,!)
传动技术
Transmission Technology
硅钢步进梁式加热炉液压系统改造
傅连东 ! 陈奎生 ! 曾良才 ! 陈新元 ! 湛从昌 ( 武汉科技大学 机械自动化学院,武汉 430081)
摘
要 :文中针对武钢热轧厂硅钢步进梁式加热炉液压系统存在的问题提出了几种改造方案,并 根据工厂 提出的改造
图!
电液比例控制双向变量泵
此种改造方案中,更换主泵、泵架及其附件,取消原 来由四个溢流阀分级压力控制实现梯级变量的流量控制 回路;采用电液比例阀控制主泵,在原电控系统与比例阀 的电控器之间设置过渡模块, 将原电控系统输出的电磁 铁开关量转换为相应的模拟量,从而控制主泵的变量,其 变量梯度可调;将机液伺服控制方式改为电控方式,简化 了液压系统及控制系统,故障点减少。 此方案能使原输入信号不变动, 主泵输出流量满足 步进梁工作要求,这样简化了控制系统,控制方式先进, 流量调节更为简单、实用、可靠。 !"! 开式系统改造方案 在闭式系统中, 一般采用变量泵控制马达或 双出 杆 双作用活塞缸的系统 较多 , 对于 单出 杆 活塞缸 则常 采用
比例液压系统在高速线材加热炉步进梁控制中的应用

作 者简 介 : 德 明 (9 8) 男 。 理 工 程 师 , 阳 工 业 大 学 流 体 传 动 与 控 张 17 一。 助 沈 制专、 毕业 。 在 济南 钢 铁 集 团石 横 特 殊 钢 厂 机 动 处 负 责 润 滑 液 雎 设 备 现 管 理 工作 。
比例方 向 阀叠 加 在 一 起 , 成 不 受 负 载影 响 的流量 控 构
好 的 密封效果 。 4 使 用效 果 徐 州液压 件 厂研制 的 十二 件 造桥 机 主液 压 缸一 次 性 通过 出厂试验 和用户严 格 的验收 ,0 2年 l 20 O月与主
因主液 压缸 自锁原 因 , 活塞 杆设 计 为梯 形 螺 纹 , 螺
纹 与 导向件 问有 较 大 的 间 隙 , 产 生 大 的侧 向力 。设 易 计时, 在导 向件 内设 置 了一 件 导 向 环 , 能刮 掉 杂质 , 既 又 吸收侧 向力 , 补使用 工况恶 劣 的不足 。 弥
进梁和 固定梁接触 , 产生很大 的撞击 和震动 。 会
2 分 析
济南钢铁集 团石横 特殊钢 厂新 建 5 O万 吨高速 线材 采用 了步进梁 式加热炉 。步进 机构 为 双层框 架结 构 , 上
上述撞 击和 震 动 主 要 由两 方 面 原 因 造成 , 是 由 一
层为平 移框架 , 下层为升降框架 , 分别 由两台平 移缸 和两 台升降缸驱动 。步进梁 的作用是 运送 在加热炉 中加热 的 钢坯 , 动作循 环为 : 升一前 进一 下 降一 后退一 上 升 , 其 上 在步进梁动作循环过程 中, 钢坯 不 断地 被步进 梁从 固定
梁上抬起 , 前进 后 又被放 到 固定 梁上 。每 根重 达 2t 的 数根钢坯 ( 最多 7 8根) 在被运送 的过 程中交 替地 与步
步进梁式加热炉液压配重系统的研发与应用.PPT

Beijing Shougang International Engineering Technology Co., Ltd
步进梁式加热炉液压配重系统的研 发与应用
主讲人:张彦滨
1.背景
• 目前,无论是棒线材轧线还是板带轧线所配置的加热炉都以步进式居多, 步进式加热炉以其承载能力大、钢坯温度控制灵活、运行平稳可靠等优点在轧 钢生产中发挥着重要作用。 步进式加热炉的步进机构主要由固定梁、步进梁、升降缸、平移缸及驱动 液压系统组成。其中步进梁的上升和下降由升降油缸沿升降导板斜面驱动,前 进和后退由平移油缸驱动。步进式加热炉通过步进梁的上升(从固定梁托起钢 坯)、前进(钢坯前移)、下降(钢坯落在固定梁上)和后退(空载返回)的 循环动作完成钢坯的加热和输送。步进梁的荷载非常大,在步进的动作循环中 的最大出力是升降缸将步进梁和钢坯托起的行程。由于荷载大,多采用2个或4 个高压大流量的升降油缸完成,下降时由于重力,步进梁可自动落回,升降缸 无须出力。步进梁下降时重力做功的能量都变成了热量,未得到充分利用。针 对以上情况,首钢国际工程公司技术团队研发了液压配重系统,该技术已获国 家发明专利,专利号ZL 2012 2 0200229.6。其特点是在步进梁升降机构中配置 了一组“液压弹簧”,“液压弹簧”由2个配重油缸和蓄能器组成。液压弹簧可 将步进梁在下降时的能量以压力能的形式蓄存起来,当步进梁上升时作为辅助 动力补原理和技术特点
液压配重系统的工作原理
关闭相关阀门,补油泵装置电机启动带动补 油泵给蓄能器组充液,达到一定压力后,压力继 电器发讯,电机停止转动,打开关闭阀门,蓄能 器和配重缸相通处于一定压力下的工作状态。当 步进梁上升时,蓄能器中的油液进入配重缸的无 杆腔,助推步进梁上升;当步进梁下降时,配重 缸无杆腔中的油液被压回蓄能器中,这样反复工 作。运行一段时间后,如果蓄能器中油液压力降 低,也就是油液有泄漏,压力继电器会发讯启动 补油泵给蓄能器充液,直到达到压力设定值,压 力继电器发讯,停泵。
步进梁式加热炉液压系统优化设计

度低 , 已不 能适应 国家节 能减 排及 当前该 厂产 能需 求 ,
急需 对原液 压系统 进行 改造 和优化 。
2 步进 梁式加 热炉 原液压 系统原理 及其 缺 陷
2 1 步进 梁加 热 炉工 况分析 .
Z HANG An ln ,JE L —io ・ g I eba ,W ANG F ip n ,YANG W e —a ,L h n ・h u o e—e g ny n IS e gz o
( 武钢 ( 团) 集 国际经济贸易总公司 , 湖北 武汉
408) 3 0 1
摘
要 :结合 步进 梁 的运 动工 况 , 分析 了步进 梁 式加 热炉液压 系统 的工作原理 及其 缺 陷, 并对 原液 压 系
油, 主泵 最高工 作压 力 l. a在压力 为 1 a 转 75MP , 5MP ,
速为 9 0rm n时 , 6 i / H泵 流量 为 17L mi, 流量 为 5 / n S泵 9 / i , 流 量 为 2 1 L m n 三 台 主 泵 不 停 机 工 4L m n 总 5 / i。
a n 5 2L m n 2 1L r n四种 , ri、0 / i、5 / i a 流量 通过 H泵和 S泵 组 合实 现 。
步进 梁周 期轨迹 的变速是 通过液 压元 件无触 点位
步 进梁式 加 热 炉液 压 原 理 简 图如 图 2 该 液 压 系 , 统泵站采 用 了三 台油 压 平 衡 型双 联 定 量 叶 片泵 泵 供
作, 通过 A D阀 ( 、 加 减速 阀 ) 行调 节 流 量 , 进 即通 过 逐 渐 地使部 分供油 泵卸荷 或 加载来 实现 调速 。
步进式加热炉液压系统设计

摘要步进式加热炉是一种靠炉底或水冷金属梁的上升、前进、下降、后退的动作把料坯一步一步地移送前进的连续加热炉。
广泛应用遍及石油、化工、冶金、机械、热处理、表面处理、建材、电子、材料、轻工、日化、制药等诸多行业领域。
本次设计任务是设计步进梁加热炉的液压系统,采用普通液压阀,由于在以一个运动周期中,要求能适应不同的负载变化和钢坯运动速度,要通过控制系统的流量来满足这些要求。
为了防止步进梁前移时产生的惯性,本系统采用了缓冲阀组成压力补偿回路,起到了缓冲作用。
为了保证步进梁下降时平稳下降,在回路上采用了平衡阀,保证了其平稳下降。
为了实现钢坯在出现故障的时候能够在任意位置停止,系统加入了液压锁紧装置,以免出现系统失控。
关键字:步进式加热炉;普通液压阀;锁紧AbstractWalking beam type furnace use the beam at the bottom of the furnace of the cool steel beam to rise,to go ahead,to come down,to go back.It is widely used in the petroleum,chemical,metalllurgy,machinery,heat treatment,surface treatment,building materials,electronic,materials,light industry,chemical,pharmaceutical and other industries.The design in mainly to design the hydraulic proportioning system for the walking beam type furnace.,In this design,the normal hydraulic valve will be used.As we know the speed of the beam will change at the reason of the change of the load in a circle,so we must change the flow of hydraulic actuating cylinder.In order to avoid the inertia generated when the walking beam goes ahead,the buffering valve is been used.In order to ensure an steady decline when the walking beam goes down.,the balance valve is been used to ensure its steady decline.As the same time,we use locking acuipement to fasting the beam at any location in case of malfunction.Key word: Walking beam type furnace; The normal hydraulic valve; Locking acuipement目录1 绪论 (5)1.1 背景及工艺 (5)1.2 设计任务 (5)1.2.1 设计题目 (5)1.2.2 主要技术参数及要求 (5)1.3 设计方案 (6)2 液压系统的计算与选型 (6)2.1 系统工作压力的确定 (6)2.2 执行元件的计算与选型 (6)2.2.1 升降液压缸 (7)2.2.2 水平液压缸 (8)2.3 执行元件速度的计算 (9)2.4 执行元件流量的计算 (9)2.4.1 升降液压缸 (9)2.4.2 水平液压缸 (10)2.5 绘制液压系统工况图 (10)2.5.1 流量循环图 (10)2.5.2 压力循环图 (10)2.5.2.1 升降缸实际工作压力计算 (10)2.5.2.2 水平缸的实际工作压力计算 (11)2.5.3 功率循环图 (11)2.6 液压元件的选择和专用件设计 (12)2.6.1 液压泵的选择 (12)2.6.1.1 确定液压泵的最大工作压力P P (12)2.6.1.2 确定液压泵的流量Q P (12)2.6.1.3 确定液压泵的驱动功率 (13)2.6.2 液压阀的选择 (13)2.6.2.1 升降液压缸 (13)2.6.2.2 水平液压缸 (14)2.6.3 蓄能器的选择 (14)3 液压系统的计算与选型 (16)3.1 油箱的选择 (16)3.2 滤油器的选择 (17)3.3 冷却器的选择 (18)3.4 加热器的选择 (20)3.5 管道的选择 (20)3.5.1 管道内径计算 (21)3.5.1.1 吸油管路 (21)3.5.1.2 压力管路 (21)3.5.1.3 吸油管路 (22)4 液压系统性能验算 (22)4.1 液压系统压力损失 (22)4.1.1 升降缸回路压力损失 (23)4.1.1.1 延程压力损失 (23)4.1.1.2 局部压力损失 (23)4.1.2 水平缸回路压力损失 (24)4.1.2.1 延程压力损失 (24)4.1.2.2 局部压力损失 (24)5 液压站的设计 (25)5.1 液压站的结构设计 (25)5.2 液压叠加回路设计 (25)5.3 液压系统的安装 (26)5.4 管路的安装和清洗 (27)5.5 液压系统的维护 (27)6 结束语 (28)参考文献 (28)1 绪论1.1 背景及工艺步进式加热炉是一种靠炉底或水冷金属梁的上升、前进、下降、后退的动作把料坯一步一步地移送前进的连续加热炉。
高线厂步进式加热炉液压系统设计
高线厂步进式加热炉液压系统设计刘嘉① 孙福卿 付秀宁(邢钢高速线材厂 河北邢台)摘 要 步进梁式加热炉炉底机械由于负载大,且属于变负荷运动,对减振和定位要求高。
液压系统具有较高的功率--质量比,采用液压系统驱动,通过编码器控制系统电液比例阀的动作,以及通过PLC编程设置加减速曲线,既避免了冲击对设备造成的伤害,又提高了系统的定位精度。
关键词 加热炉 步进梁 液压系统 比例控制 定位精度中图法分类号 TG155.4 文献标识码 BDoi:10 3969/j issn 1001-1269 2023 Z2 0241 前言邢钢高速线材厂加热炉采用侧进侧出的步进梁式加热炉,以二车间为例,步进机械动梁和钢坯总负荷为250t,动作周期为40s。
由于液压系统具有较大的功率-质量比,并且易于实现预设动作要求,因此采用液压系统驱动。
2 液压系统设计2.1 机械动作要求步进机械动梁结构示意图见图1。
步进机械动梁运动轨迹示意图见图2。
图1 步进机械动梁结构示意图1-提升框架;2-升降油缸;3-平移框架;4-横移油缸图2 步进机械动梁运动轨迹示意图动作原理如下:升降油缸活塞杆伸出,提升框架上升,步进梁由“1”点位开始向“2”点位作上升运动一→横移油缸活塞杆缩回,驱动平移框架前进,步进梁由“2”点位运动到“3”点位→升降油缸活塞杆缩回,驱动升降框架下落,步进梁由“3”点运动到“4”点位→平移油缸活塞杆伸出,平移框架后退,步进梁由“4”点位运动到“1”点位。
此时,步进梁完成一个动作循环。
2.2 技术要求1)技术参数以二车间为例:最大载荷250;步进周期40s;升降油缸上升、下降时间各15s;平移油缸前进、后退时间各5s;升降油缸升、降距离±90mm(以固定梁为基准);平移油缸进、退距离263mm。
2)工艺要求液压系统要求达到3个主要指标:1)实现升降、平移预设速度-位移曲线;2)运行轨迹不受载荷分配的影响,定位精度高,冲击小。
步进式加热炉液压系统特点及其原理

。
1 步进 系统 液压 系统 的设 计
随 着 冶 金 轧 钢 工 艺 自动 化 程 度 不 断 提 高 .步 进 式 加 热炉 以其灵 活的加 热方式 、 加热 质量好 , 炉长 不受 限制 、 操作方便 、 易 于 实 现 自动 控 制 优 点 , 被 愈 来 愈 多 新 建 的 轧
和 比例 放 大 器 所 输 出 的 流 量 呈 线 性 关 系 。在 步 进 式 加 热
停 均匀速度等要求 。如 图 1
一
缸体 中 , 通 过位置传感 器将具体 电流信号反馈 出来 , 以对
一
1
.
放 大 器 输 出 电流 进 行 及 时 性 调 整 , 这 样 就 能 灵 活 调 整 活 塞 杆 速 度 。 并 将 缓 冲 回 路 单 独 设 置 在 步 进 式 加 热 炉 液 压 系
实 现板 坯 在 出现 故 障 的 时候 能在 任 意 位 置 停 止 , 系统 加 入 了液 压锁 紧装 置 . 以免 出现 系统 失 控
关键 词 : 步 进 式加 热 炉 ; 比例 阀 : 锁 紧 中 图 分类 号 : T G3 0 7 文 献标 志码 : A 文章编号 : 1 6 7 2 — 3 8 7 2 ( 2 0 1 7 ) 0 5 — 0 1 0 9 — 0 2
\
升降幕统
/
0 、 兰 / 谴
平移系统
平移 系统 动 作
统中。 这样能够在 比例 阀失控情 况下 , 降低 动梁所 出现 的
惯 性 冲 击 。步 进 式 加 热 炉 液 压 系 统 中 的溢 流 阀 主 要 用 途
升 降 系统 动 作
图1 升 降 平 移 系 统 动 作 示 意 图
步进式加热炉液压节能改造
步进式加热炉液压节能改造刘小民【摘要】The energy conservation and emission reduction is the transformation trend in enterprises at present By reforming the furnace bottom machinery of walking beam furnace in certain steel plant, reconstruction is made based on the original hydraulic cylinder, with the potential energy stored in the energy accumulator. The potential energy can be converted to kinetic energy by energy accumulator which facilitates to elevating the frame structure. The energy consumption is calculated and compared, with further comparison of advantages and disadvantages between old and new schemes, which is a good example of energy conservation and emission reduction for steel companies.%节能减排是目前企业的转型趋势,通过改造某钢厂步进式加热炉的炉底机械,在原有液压缸基础上进行改造,并将势能储存在蓄能器中,利用蓄能器将势能转化为动能,起到了助推提升框架的作用.同时还核算并对比了耗电量,并提出新旧两个方案的优缺点,成为钢企节能减排的优秀案例.【期刊名称】《起重运输机械》【年(卷),期】2013(000)004【总页数】3页(P107-109)【关键词】步进炉;节能;蓄能器;提升液压缸;平移液压缸【作者】刘小民【作者单位】中冶南方(武汉)威仕工业炉有限公司武汉430223【正文语种】中文【中图分类】TG457.23目前我国正由粗放型向集约型社会转型,节能改造是钢企降低能耗、提高产能的大趋势。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
文章编号:1004-9762(1999)01-0025-04液压比例技术在钢管步进梁式再加热炉的应用李建国1, 方桂花2(1.包头钢铁设计院,内蒙古包头 014010;2.包头钢铁学院机械工程系,内蒙古包头 014010)关键词:再加热炉;液压技术;设计中图分类号:T H137 文献标识码:A摘 要:对钢管步进梁式再加热炉运动速度采用比例方向阀控制,可实现控制步进机械的运动速度和方向,获得最优控制.介绍了采用比例方向阀再加热炉液压系统的设计要点、控制方式和使用效果,分析了比例技术的应用特点.Application of hydraulic proportionaltechnology in the reheating furnaceLI Jian-guo1,FANG Gui-hua2(1.Bao to u Eng ineer ing and Research Co rper atio n of Ir on and Steel Industr y,Baot ou014010,China; 2.Depar tment o f M e-chanical Engineer ing,U IST Bao tou,Bao tou014010,China)Key words:reheating furnace;hy dr aulic;designingAbstract:It is possible to use pr o po rtional directio nal v alve to adjust speed a nd direction of r eheating fur nace and the optimal contr ol can be obtained.T he desig n m ain po ints,contr ols pa tter and applicatio n results o f hy dr aulic sy stem of r ehea ting fur-na ce using pr opo rtional dir ect ional v alve are pr esented and the applicatio n character istic of pro po rt ional techno lo gy is anal-ysed. 随着轧钢工业自动化程度的不断提高,步进式再加热炉的应用越来越广泛.步进式再加热炉具有加热周期短,温度均匀等优点〔1〕,是钢管加热的理想选择.本文结合某钢管厂 100热轧机组步进梁式再加热炉液压系统,阐述了液压比例技术的应用.荒管再加热炉为连轧机与定径机或张力减径机之间的中间环节〔2〕.在加热过程中,荒管边步进边旋转,在动梁与定梁上停留的时间相同,以避免烧出黑印而轧出螺旋线.由于荒管壁薄且长,高温时刚度和强度都很低,且已接近成品,因此,炉底机械必须保证连续生产,安全可靠,对荒管“轻托轻放”,没有跑偏,没有冲击,采用液压比例技术可以很好地保证上述工况的实现.1 工艺要求〔1〕(1)动作状态.根据生产工艺要求,步进机械动作状态应为3种.A.自动工作制,动作循环连续进行.B.半自动工作制,动作完成一个循环即停止.C.手动工作制,各项动作手动操作.(2)步进梁动作时应平稳,不应对荒管产生冲击.(3)钢管在动梁与定梁上停留的时间须相等.1999年3月第18卷第1期包头钢铁学院学报M arch,1999 Jour nal o f Bao tou U niv ersit y o f Iro n and Steel T echnolog y Vo l.18,No.1收稿日期:1998-12-16作者简介:李建国(1960-),男,内蒙古包头人,包头钢铁设计院工程师.2 分析与设计为了实现上述要求,我们设计了步进机械速度曲线(图1).升降接触荒管时,采取中间减速,以低速接触荒管,实现“轻托轻放”.平移运动只利用比例控制实现停位准确无冲击.图1 炉底机械运动速度曲线图Fig .1 Moving speed curve of the furnace bottom 注:1.黑点表示接近开关发讯位;2.该图表示正循环;3. 为二种运动速度间的间隙时间;4. 1为原始零位. 荒管在动梁和定梁上的时间分别为:t dyn =t u ,t + 2+t j + 3+t d,k =t ,t s =t d,t + 4+t t + 1+t u ,k =t ,t dyn =t s =t ,式中,t j ,t t 为步进梁前进、后退所需的时间;t u,k ,t u,t 为动梁上升时空载及托钢运行时间;t d,k ,t d,t 为动梁下降时空载及托钢运行时间,则钢管步进一个周期的总时间为t ste =t u,k +t u,t +t d,k +t d,t +t j +t t +1+ 2+ 3+ 4=2t .实现设计曲线,多数采用机电液一体化元件〔3〕来实现调速,即把微弱的电信号转变为机械量,然后将机械量转变为相应的液压信号并经放大输出为与电信号成比例的液压功率.它们具有控制精度高、响应速度快、体积小、重量轻、能发出连续控制信号等优点〔4〕.80年代国内新上炉子基本上全采用了比例流量阀调速系统控制机构运动速度,这种回路使系统复杂,维护不便.为此我们在设计中根据用户实际情况,采用了比例调速的方法,即采用比例方向阀〔5〕既控制输出流量,又控制方向,从而控制动作速度.这种方法经济节能,响应速度快,维护方便.下面以升降速度曲线(图2)为例加以说明.图2 升降速度曲线Fig .2 Lift and fall speed curve图2中,v 1,v 2,v 3为各段匀速运动的速度;a 1,a 2为加减速度;t 1,t 2为升降时第一次加速、匀速运动的时间;t 3,t 4为升降时第一次减速、第二次匀速运动的时间;t 5,t 6,t 7为升降时第二次加速、第三次匀速、第二次减速运动的时间;S 1,S 2为升降时第一次加速、匀速运动的位移;S 3,S 4为升降时第一次减速、第二次匀速运动的位移;S 5,S 6,S 7为升降时第二次加速、第三次匀速、第二次减速运动的位移.(1)t u =t 1+t 2+t 3+t 4+t 5+t 6+t 7;(2)S 1=12a 1t 21, S 2=a 1t 1t 2,S 3=a 1t 1t 3-12a 2t 23,S 4=(a 1t 1-a 2t 3)t 4,S 5=(a 1t 1-a 2t 3)t 5+12a 1t 25,S 6=(a 1t 1-a 2t 3+a 1t 5)t 6,S 7=12a 2t 27;(3)a 1t 1+a 1t 5-a 2t 3-a 2t 7=0,即:a 1(t 1+t 5)=a 2(t 3+t 7);(4)S 1+S 2+S 3≤S 0,上升:S 0=S hsin,下降:S 0=S bsin;(5)S 1+S 2+S 3+S 4≥S 0;(6)t 1+t 5<t 3+t 7,使a 1>a 2;(7)t u,k =t 1+t 2+t 3+S 0-S 1-S 2-S 3a 1t 1-a 2t 3,t u,t =t u -t u,k ;(8)t d,k =t 1+t 226包头钢铁学院学报1999年3月 第18卷第1期t d,t =t d -t d,k ,式中,S h ,S b 为动梁在定梁上、下的位移;S 0为升降时托起或放下钢管的位移; 为升降斜轨倾角;t u ,t d 为步进梁上升、下降所需要的时间.以上即为计算依据.升降运动段:根据执行元件油缸的缸径及行程计算出最大流量与最小流量对应的电流占最大电流的比例,二者之差即是比例阀流量调节范围.计算结果必须使该范围处于比例阀流量曲线的线性段,否则说明比例阀造型有误,应重新选择,而且调节范围大使得调试方便,应用灵活.同理,可计算并选取平移运动的比例方向阀.3 液压系统说明3.1 原理液压系统原理如图3.图3 液压系统原理图Fig .3 Principle diagram of hydraulic system 系统工作压力:12M Pa.系统工作介质:YB -N 46矿物油.介质过滤精度:10 m.主泵:恒压变量泵3台(1台备用).循环泵:螺杆泵2台(1台备用).3.2 系统说明该液压系统设有油压监视、液位监控、油温监控,并设有三级防振减振措施来减少振动和压力脉动引起的噪音〔6〕.系统还设置了一个皮囊式蓄能器来消除系统压力脉动,并加快比例阀的响应速度.3.3 系统特点(1)设置了独立的循环冷却过滤回路,该回路除对工作介质进行循环冷却过滤外,还可完成向油箱加油和从油箱排油的功能.(2)设置了必要的备用回路,确保轧管生产的连续性.当使用中的元器件出现故障时,可立即切换到备用元器件上,以确保连续生产.(3)设置了压力油精过滤回路,主要是为了保证比例阀入口的清洁度.(4)设置了必要的检查、检修措施,给调试生产带来方便.(5)设置了必要的安全措施,确保步进机械和液压系统的安全.27李建国等:液压比例技术在钢管步进梁式再加热炉的应用4 结束语某钢管厂 100热轧车间步进梁式再加热炉经过3个月的安装、调试和试生产,就已顺利进行正常生产,缩短了安装和调试的时间,其中液压系统一周即调试成功,得到了用户的一致好评.液压比例技术在钢管步进梁式再加热炉中的应用已有2年多的时间,经历了多种规格钢管的加工,效果极佳,控制精度、响应速度大大提高,系统运行可靠,调整灵活方便,完全避免了尖峰压力,延长了步进机械和液压元件的使用寿命.液压比例控制技术的特点在步进梁式再加热炉的应用中得到充分体现.我们认为,液压比例技术不仅在再加热炉、冶金工业中,而且将在所有工业部门发挥作用,取得更大效益.〔参考文献〕〔1〕 何用梅.现代连续加热炉〔M〕.北京:冶金工业出版社,1981.〔2〕 王北明,等.国外连轧钢管〔M〕.北京:冶金工业出版社,1978.〔3〕 刘思澜,陈雨洪.现代比例液压阀电控技术综述〔J〕.机床与液压,1993,(1):39-44.〔4〕 吴根茂,邱敏锈,王庆丰,等.实用电液比例技术〔M〕.杭州:浙江大学出版社,1993.〔5〕 吴晓明,高殿荣,韩晓娟.电液比例方向阀的选择和实用回路〔J〕.液压与气动,1993,(6):19-21.〔6〕 李鸣,李俊,苏国桢.电液比例控制技术在钢管水压实验机上的应用〔J〕.机床与液压,1996,(6):11-12.信息窗我院又一项科研成果被列入国家重点推广计划1998年末,我院科研成果之一“热风炉冷风分配器”被科技部列为“九五”国家科技成果重点推广计划,至此,我院已有3项科研成果先后被列入国家重点推广计划。