DEK参数中文解释
DEK印刷机参数设置
DEK印刷机参数设置的基本原则
确保印刷质量: 根据印刷品的要 求合理设置参数 保证印刷质量
提高生产效率: 合理设置参数提 高生产效率降低 生产成本
保证设备安全: 合理设置参数保 证设备安全避免 设备损坏
符合环保要求: 合理设置参数符 合环保要求降低 环境污染
DEK印刷机参数设置的主要内容
印刷机类型:DEK印刷机 主要参数:分辨率、色彩模式、打印速度、纸张尺寸等 参数设置方法:通过控制面板或软件进行设置 参数调整技巧:根据实际需求调整参数以达到最佳打印效果
设置印刷分辨率和色彩管理参数
打开DEK印刷机控制面板 选择“设置”选项卡 在“分辨率”设置中选择合适的分辨率如300dpi或600dpi 在“色彩管理”设置中选择合适的色彩模式如RGB或CMYK 保存设置并确认参数设置成功
调整印刷压力和墨量控制参数
印刷压力:根据印刷材料和印刷效果调整一般控制在1020kg/cm²
确保印刷安全和稳定
检查印刷机是否处于正常工作状 态
定期进行设备维护和保养
添加标题
添加标题
添加标题
添加标题
确保印刷材料和油墨符合安全标 准
操作人员需经过专业培训并遵守 操作规程
注意印刷成本和效率
合理设置印刷速度避免过快导致印刷质量下降 调整印刷压力确保印刷效果和印刷速度的平衡 控制油墨用量减少浪费降低印刷成本 定期检查和维护印刷机确保印刷质量和效率
特殊印刷:如烫金、烫银等 需要设置专门的烫金、烫银 参数并调整墨量
印刷速度:根据印刷需求调 整印刷速度如快速印刷、慢 速印刷等
印刷质量:根据印刷需求调 整印刷质量如高精度印刷、 普通印刷等
印刷材料:根据印刷需求选 择合适的印刷材料如纸张、 塑料、金属等
DEK 参数设定表(Dream)
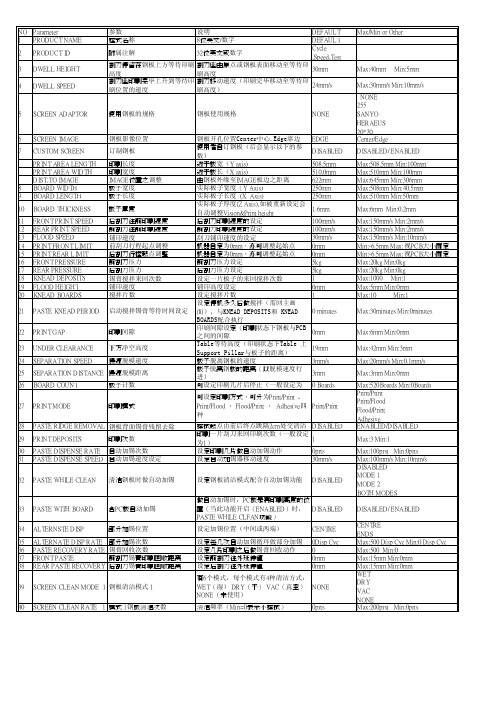
NO Parameter参数说明DEFAULT Max/Min or Other 1PRODUCT NAME程式名称8位英文/数字DEFAULT2PRODUCT ID附属注解32位英文或数字Cycle,Speed,Test3DWELL HEIGHT 刮刀停留在钢板上方等待印刷高度刮刀座由原点或钢板表面移动至等待印刷高度30mm Max:40mm Min:5mm4DWELL SPEED 刮刀座印刷完毕上升到等待印刷位置的速度刮刀移动速度(印刷完毕移动至等待印刷高度)24mm/s Max:30mm/s Min:10mm/s5SCREEN ADAPTOR使用钢板的规格钢板使用规格NONE NONE 255 SANYO HERAEUS 20*206SCREEN IMAGE钢板影像位置钢板开孔位置Center中心,Edge靠边EDGE Center/Edge7CUSTOM SCREEN订制钢板使用者自订钢板(后会显示以下的参数)DISABLED DISABLED/ ENABLEDPRINT AREA LENGTH印刷长度近于板宽(Y axis)508.5mm Max:508.5mm Min:100mm PRINT AREA WIDTH印刷宽度近于板长(X axis)510.0mm Max:510mm Min:100mm DIST.TO IMAGE IMAGE位置之调整由钢板外缘至IMAGE板边之距离622mm Max:645mm Min:306mm 8BOARD WIDTH板子宽度实际板子宽度(Y Axis)250mm Max:508mm Min:40.5mm 9BOARD LENGTH板子长度实际板子长度 (X Axis)250mm Max:510mm Min:50mm10BOARD THICKNESS板子厚度实际板子厚度(Z Axis),如被重新设定会自动调整Vision&Print height1.6mm Max:6mm Min:0.2mm11FRONT PRINT SPEED后刮刀往前印刷速度后刮刀印刷速度的设定100mm/s Max:150mm/s Min:2mm/s12REAR PRINT SPEED前刮刀往前印刷速度前刮刀印刷速度的设定100mm/s Max:150mm/s Min:2mm/s13FLOOD SPEED铺印速度刮刀铺印速度的设定30mm/s Max:150mm/s Min:10mm/s14PRINT FRONT LIMIT前刮刀行程起点调整机器自定为0mm,亦可调整起始点0mm Min:-6.5mm Max:视PCB大小而定15PRINT REAR LIMIT后刮刀行程起点调整机器自定为0mm,亦可调整起始点0mm Min:-6.5mm Max:视PCB大小而定16FRONT PRESSURE前刮刀压力前刮刀压力设定5kg Max:20kg Min:0kg17REAR PRESSURE后刮刀压力后刮刀压力设定5kg Max:20kg Min:0kg18KNEAD DEPOSITS锡膏搅拌来回次数设定一片板子的来回搅拌次数1Max:1000 Min:119FLOOD HEIGHT铺印速度铺印高度设定0mm Max:5mm Min:0mm20KNEAD BOARDS搅拌片数设定搅拌片数1Max:10 Min:121PASTE KNEAD PERIOD启动搅拌锡膏等待时间设定设定停机多久后做搅拌(需回主画面),与KNEAD DEPOSITS和 KNEADBOARDS配合执行0 minutes Max:30minutes Min:0minutes22PRINT GAP印刷间隙印刷间隙设定(印刷状态下钢板与PCB之间的间隙0mm Max:6mm Min:0mm23UNDER CLEARANCE下方净空高度Table等待高度(印刷状态下Table 上Support Pillar与板子的距离)19mm Max:42mm Min:3mm24SEPARATION SPEED慢速脱模速度板子脱离钢板的速度3mm/s Max:20mm/s Min:0.1mm/s25SEPARATION DISTANCE慢速脱模距离板子脱离钢板的距离(以脱模速度行进)3mm Max:3mm Min:0mm26BOARD COUNT板子计数可设定印刷几片后停止(一般设定为0 Boards Max:520Boards Min:0Boards27PRINT MODE印刷模式可设定印刷方式,可分为Print/Print 、Print/Flood 、 Flood/Print 、 Adhesive四种Print/PrintPrint/PrintPrint/FloodFlood/PrintAdhesive28PASTE RIDGE REMOVAL钢板背面锡膏残留去除擦拭起点由前后终点跳隔2cm处交清洁DISABLED ENABLED/DISABLED29PRINT DEPOSITS印刷次数印刷一片刮刀来回印刷次数(一般设定为1)1Max:3 Min:130PASTE DISPENSE RATE自动加锡次数设定印刷几片做自动加锡动作0prts Max:100prst Min:0prts 31PASTE DISPENSE SPEED自动加锡速度设定设定自动加锡器移动速度30mm/s Max:100mm/s Min:10mm/s32PASTE WHILE CLEAN清洁钢板时做自动加锡设定钢板清洁模式配合自动加锡功能DISABLED DISABLED MODE 1 MODE 2 BOTH MODES33PASTE WITH BOARD含PC板自动加锡做自动加锡时,PC板是再印刷高度的位置(当此功能开启(ENABLED)时,PASTE WHILE CLFAN功能)DISABLED DISABLED/ ENABLED34ALTERNSTE DISP部分加锡位置设定加锡位置(中间或两端)CENTRE CENTRE ENDS35ALTERNATE DISP RATE部分加锡次数设定每几次自动加锡循环做部分加锡0Disp Cyc Max:500 Disp Cyc Min:0 Disp Cyc 36PASTE RECOVERY RATE锡膏回收次数设定几片印刷之后做锡膏回收动作0Max:500 Min:037FRONT PASTE前刮刀锡膏印刷回收距离设定前刮刀往外延伸值0mm Max:15mm Min:0mm38REAR PASTE RECOVERY后刮刀锡膏印刷回收距离设定后刮刀往外延伸值0mm Max:15mm Min:0mm39SCREEN CLEAN MODE 1钢板清洁模式 1有6个模式,每个模式有4种清洁方式:WET(湿) DRY(干) VAC(真空)NONE(未使用)NONEWETDRYVACNONE40SCREEN CLEAN RATE 1模式 1钢板清洁次数清洁频率(Min=0表示不擦拭)0prts Max:200prst Min:0prts41SCREEN CLEAN MODE 2钢板清洁模式 2有6个模式,每个模式有4种清洁方式:WET(湿) DRY(干) VAC(真空)NONE(未使用)NONEWETDRYVACNONE42SCREEN CLEAN RATE 2模式 2钢板清洁次数清洁频率(Min=0表示不擦拭)0prts Max:200prst Min:0prts43CLEAN AFTER KNEAD锡膏搅拌后清洁模式锡膏搅拌过后机器会进行自动擦拭NONE WET DRY VAC NONE44CLEAN AFTERDOWNTIME停机后清洁模式停机时间超过设定时间,机器会进行自动擦拭NONEWETDRYVACNONE45CLEAN AFTER停机时间启动自动擦拭的停机时间设定30minutes Max:120minutes Min:1minutes 46DRY CLEAN SPEED干擦速度干擦速度设定30mm/s Max:120mm/s Min:10mm/s 47WET CLEAN SPEED湿擦速度湿擦速度设定30mm/s Max:100mm/s Min:10mm/s 48VAC CLEAN SPEED真空擦速度真空擦速度设定30mm/s Max:100mm/s Min:10mm/s 4950FRONT START OFFSET前刮刀清洁补偿值前刮刀擦起点设定30mm Max:60mm Min:0mm51REAR START OFFSET后刮刀清洁补偿值后刮刀擦起点设定30mm Max:60mm Min:0mm52SOLVENT DISPENSE溶剂润湿时间溶剂润湿卷纸时间设定0.4secs Max:4secs Min:0secs53545556575859CLEANER PAPERADVANCE擦拭器纸卷移动距离纸卷每次卷动距离设定20mm Max:200mm Min:0mm60KNEAD AFTER DISPENSE加锡后锡膏搅拌自动加锡后要不要进行锡膏搅拌动作DISABLED DISABLED/ENABLED 61FRONT KNEAD SPEED刮刀向前搅拌速度后刮刀往前搅拌速度设定10mm/s Max:150mm/s Min:2mm/s 62REAR KNEAD SPEED刮刀向后搅拌速度前刮刀往后搅拌速度设定10mm/s Max:150mm/s Min:2mm/s 63FRONT KNEAD刮刀向前搅拌压力后刮刀在前进行搅拌的压力设定5kg Max:20kg Min:0kg64REAR KNEAD PRESSURE刮刀向后搅拌压力前刮刀在后进行搅拌的压力设定5kg Max:20kg Min:0kg65BOARD 1 FID .TYPE板子基准点1的形状基准点的形状共有圆形,矩形,菱形,三角形,双正方形,十字行,影像形式Circle66BOARD 2FID . TYPE板子基准点2的形状67BOARD 3 FID. TYPE板子基准点3的形状68SCREEN 1 FID. TYPE钢板基准点1的形状69SCREEN 2 FID. TYPE钢板基准点2的形状70SCREEN 3 FID.TYPE钢板基准点3的形状71FIDUCIAL 1 X基准点1 X的坐标从板子的右边或左边开始计算(确认设备为右参考或左参考)242.5mm72FIDUCIAL 1 Y基准点1 Y的坐标从板子的边缘开始计算(确认设备为右参考或左参考)241.0mm73FIDUCIAL 2 X基准点2 X的坐标从板子的右边或左边开始计算(确认设备为右参考或左参考)7.0mm74FIDUCIAL 2 Y基准点2 Y的坐标从板子的边缘开始计算(确认设备为右参考或左参考)9.0mm75FIDUCIAL 3 X基准点3 X的坐标从板子的右边或左边开始计算(确认设备为右参考或左参考,在AlingnmentMode 选择"3 FIDUCIAL"才会执行这一项)7.0mm76FIDUCIAL 3 Y基准点3 Y的坐标从板子的边缘开始计算(确认设备为右参考或左参考,在Alingnment Mode选择"3 FIDUCIAL"才会执行这一项))241.0mm77FORWARD X OFFSET前行程 X的补偿值印刷偏移的补偿(刮刀由后往前)0.0mm±1mm78FORWARD Y OFFSET前行程 Y的补偿值印刷偏移的补偿(刮刀由后往前)0.0mm±1mm79FORWARD θ OFFSET前行程 θ的补偿值印刷偏移的补偿(刮刀由后往前)0asec±1000asec 80REVERSE X OFFSET后行程 X的补偿值印刷偏移的补偿(刮刀由前往后)0.0mm±1mm81REVERSE Y OFFSET后行程 Y的补偿值印刷偏移的补偿(刮刀由前往后)0.0mm±1mm82REVERSE θ OFFSET后行程 θ的补偿值印刷偏移的补偿(刮刀由前往后)0asec±1000asec83SCREEN X FORWARD钢板前向 X 修正值执行基准点后,电脑自动计算出(若以旧档修改需归零)0.0mm±20mm84SCREEN X REAR钢板后向 X 修正值执行基准点后,电脑自动计算出(若以旧档修改需归零)0.0mm±20mm85SCREEN Y钢板 Y 轴 修正值执行基准点后,电脑自动计算出(若以旧档修改需归零)0.0mm±10mm86ALIGNMENT WEIGHTING对位调整比重适用2个基准点(一般设定50%)50%Max:100% Min:0% 87X ALIGN WEIGHTING X 调整比重适用3个基准点,设定X 对位校正50%Max:100% Min:0% 88Y ALIGN WEIGHTING Y 调整比重适用3个基准点,设定Y 对位校正50%Max:100% Min:0%89ALIGNMENT MODE对位模式可选取照2个或3个基准点或不使用2FIDUCIAL 2FIDUCIAL 3FIDUCIAL NON VISION90TOOLING TYPE支撑方式的设定VACUUM 真空,MAGNETIC PILLARS磁MAGNETIC MAGNETIC/VACUUM91BOARD STOP X板子停止 X坐标板子在机器中X轴定位位置设定(一般在设定板长时,会自动取1/2值)125mm92BOARD STOP Y板子停止 Y坐标板子在机器中Y轴定位位置设定(一般在设定板宽时,会自动取2/3值)165mm93RIGHT FEED DELAY右边供板延续从右边进板需设定延续时间0secs Max:3secs Min:0secs94PASTE START自动加锡起始位置设定自动加锡位置起始点(以中心为原点,为1/2板长,极限位置会依照钢板转接器设定不同)-125Max:255mm Min:-255mm95PASTE STOP自动加锡终止位置设定自动加锡位置终止点(以中心为原点,为1/2板长,极限位置会依照钢板转接器设定不同改)125mm Max:255mm Min:-255mm96?BOARD - AT-STOP RUN-ON0.3secs Max:1secs Min:0secs97SPC CONFIGURATION SPC资料结构机器SET UP时做设备CPK值需进入将SPC开启EDITDATA OUTPUT RATE资料输出频率设定每片或间隔式输出资料(AlignmentData and General Data)EVERY CYCLE EVERY CYCLE/ON INSPECTSTART RATE开始片数设定印刷第几片开始做SPC资料连续输出(1为EVERY CYCLE设定,针对Alignment Data资料1cycles Max:100cycles Min:1cyclesSAMPLE RATE取样片数完成开始/结束连续资料输出后,以后每印刷几片取样做 SPC资料输出(0为不启用,设定EVERY CYCLE时Alignment 与General Data为断续累)0cycles Max:100cycles Min:0cyclesSTART RATE LIMIT结束片数一旦启动SPC资料输出后到第几片才结束(0为不启用,主要针对AlignmentData资料点)0cycles Max:100cycles Min:0cyclesSPC DATA MODE资料输出模式分为网路,本碟,串接及串接+网路与串接+本碟两者同时输出或不输出任何资料(串接不支援Horizon,Infinty;NONE为关闭SPC功能)NONENONEREMOTEDISCSERIALSERIAL+REMOTESERIAL+DISCSPC FORMAT SPC资料格式SPC资料格式设定( Lt/GSX为 DOS,Typhoon Swries 为Windows)WINDOWS WINDOWS/DOSUPDATE ON START-UP启动后更新模式新程式启动后是否自动更新Nominaland Yolerance (仅SPC FORMAT设为DOS才有作用)NO NO/YESALIGN INSPECYT MODE对位误差资料模式设定是否截取对位误差资料模式又分为印刷后,印刷前后之资料收集NONENONEPOST PRINTPRE+POST PRINTPRE PRINT982D INSPECT RATE2D检查次数设定每印刷片后做2D检验0Max:100 Min:099BOARD 2DI TYPE检验PC板CAMERA功能设定针对2D的功能启动(须注意购买时的功能为何而设定)NONENONEBASICADVANCED100STENCIAL 2DI TYPE检验钢板CAMERA功能设定针对2D的功能启动(须注意购买时的功能为何而设定)NONENONEBASICADVANCED101PRE- IMAGE MODE影像截取模式分为每片或只针对第一片截取ONE ONE/EVERY102MIN SITES/CYCLE检查位置数每一印刷行程最少需检查的位置数量0Max:0 Min:0103WARNING LIMIT超限警报设定检验不良数,超过就警报3Max:20 Min:1104LOW PASTE ACTION缺锡执行方式手动处理或重印0MANUAL/RE-PRINT 105TOOLING DEVIATION PC板支撑监控设定支撑差异控警报值20%Max:50% Min:0%。
DEK中文版操作手册

DEK中文版操作手册Dek篇1.设备操作手册1.1 机器认识11.2安全警告與小心为了确保印刷机操作状况在任何时间均保持安全,所有职员必须广泛地遵守并接受除在手册描述之特别安全注意事项外之安全规范.警告标示引起作业员与保养员对可造成死亡,重伤或病症的可能危险的注意.这些危险不是设备固有就是在设备操作时产生出来的.在机器上使用的警告卷标的范例展示于另一边的表格内.底下展示的结合警告和小心预防的卷标,贴于机台上意味着使用者尝试在设备上执行此作业前应先参阅技术参考手册内相关章节内容.小心标示警告职员随着偏离描述步骤所可能引发的人或料可能的损害.小心标示并不意味对职员的危险.一个小心标示的例子如下:小心摄影机损毁..不要留下任何未用治具于升降平台的后轨道后方区域.如有任何物体留在升降平台的PC板印刷区域外,当平台上升至印刷高度时,它将可能与摄影机相撞.警告: 惊叹号应用于未被特殊警示所涵盖的一切危险的一般警示.警告: 切割物在警示卷标附近存在锐利边缘伤害的危险.当在指定区域工作时需特别小心.警告: 刺激物存在会立即产生发炎的物质,并会重复或延长与黏膜或皮肤的接触.警告: 易燃物存在易燃物质,应远离热,燃烧源与静电放电,使用于通风良好区域.警告: 移动物在警示卷标附近存在移动对象,这些对象有能力造成伤害.设备外盖不可移开.警告: 辐射物在卷标附近存在因雷射光造成眼睛伤害的危险.不要直视光源或物体表面之直接反射光.警告: 受压物高压存在并可能造成伤害.不要企图直接开启系统至大气下.警告: 电力危险高电压存在并可能造成伤害或死亡.不要从设备外罩移除保护盖或不顾保护装置.警告定義21.3设备概观範圍這手冊應由適當訓練過的設備操作人員來使用.對於設備的一般操作狀況它是個快速入門指南.關於設備設定更深一層的資訊則總括到技術參考手冊項次說明1 觸控式螢幕2 系統按鈕3 滑鼠4 雙按鈕控制5 鍵盤6 主電源開關7 緊急開關按鈕8 錫膏滾動燈9 三色燈當機器啟動電源後,按下兩紅色緊急開關中任一能以受控方式使機器停止31.4人机接口狀態頁在主要控制螢幕上所顯示的資訊為狀態頁.狀態頁有兩種版本顯示模式.可在Set Prefs選單內Display Type螢幕顯示模式做選擇模式1模式2項次說明1 印刷機主題視窗2 製程參數視窗3 訊息提示帶4 項目單5 視覺資料視窗6 警告訊息視窗7 印刷機狀態視窗項次說明1 製程參數視窗2 設備參數視窗3 訊息提示帶4 項目單5 視覺資料視窗6 警告訊息視窗7 印刷機狀態視窗8 印刷機主題視窗在觸控式螢幕上觸壓相關的項目圖像便能完成功能選擇.另一種選擇方式是藉由鍵盤上功能鍵F1到F8來做選擇4視覺資料視窗可利用在狀態頁上的Zoom In或Zoom Out圖像來改變視覺資料視窗的大小.51.5三色灯此訊息燈顯示設備的作動狀態.設備無法作動系統電源關閉錯誤訊息顯示設備未在準備狀態設備在初始化燈號顏色作動狀態設備在設定中設備在維護下設備提示操作者注意卡匣錫膏不足擦拭紙卷用盡擦拭溶劑耗盡設備可作動設備在就緒狀態等待61.6 开机与登入1. 旋轉主電源開關至ON處.2. 設備提示時按壓System鈕.已選好的狀態頁模式會與下列功能選單一起顯示: 3. 觸壓Monitor (鍵盤上F7功能鍵).4. 觸壓Log On (F1).操作員登入視窗顯示:使用鍵盤輸入操作員I.D.後按下Enter鍵.5. 觸壓Exit (F8).71.7产品换线新產品1. 觸壓Setup (F6).2. 觸壓Load Data (F2).儲存於設備內所有產品檔案表會顯示出來:3. 使用Left, Right, Up和Down (F4, F5, F6和F7) 反白所需檔案.4. 觸壓Load (F1).選定的檔案會顯示在狀態頁.5. 觸壓Change Screen (F5).6. 系統提示時掀起前方印刷頭蓋.8912. 触压Change Tooling (F6).13. 触压Head (F2).14. 使用双控制钮抬起印刷头.7. 移出钢板.8. 加载新钢板到机器内并确保正确方位与开孔位置.9. 放下前方印刷頭蓋.10. 按下System 鈕.11. 触压Change Screen (F5).10PC 板夾板器. 當在機器支撐器置放區作業時需極端小心夾板系統且必須經過練習以避免傷害.在前方和後方夾板系統上的金屬薄片是非常鋒利的DEK 建議只有操作員能更換磁性支撐桿.使用其它支撐器或許需要變更PC 板狀態檔.16. 调整PC 板支撑器至适合产品位置来准备印刷.小心攝影機損毀..不要留下任何未用治具於升降平台的後軌道後方區域.如有任何物體留在升降平台的PC 板印刷區域外,當平台上升至印刷高度時,它將可能與攝影機相撞.15. 装上印刷头支撑杆 17. 移开印刷头支撑杆并归回原位.18. 触压Head (F2).19. 使用雙控制鈕放下印刷頭.20. 按下System紐.21. 触压Exit (F8).22. 觸壓Exit (F8).111.8印刷参数调整自動模式1. 觸壓Setup (F6).2. 觸壓Mode (F1) 直到Auto出現在狀態頁的模式選項上3. 觸壓Exit (F8).4. 觸壓Run (F1).印刷機將連續不斷地運作. 批量印刷1. 觸壓Monitor (F7).2. 觸壓Batch Limit (F4).批量計數極值視窗會顯示在螢幕上:3. 使用微調鍵Incr.及Decr. (F6和F7) 可設定所需批量數.4. 觸壓Exit (F8).125. 触压Exit (F8).6. 触压Run (F1).印刷選單當設備於自動模式下運作時會顯示下列選單:选择End Run可停止印刷机于完成该印刷周期选择Stop Cycle将立即停止印刷在印刷期間的任何階段皆能啟用下述功能錫膏添加擦拭鋼板參數調整攪拌錫膏調整檢查作業員不應該使用參數調整及調整檢查. 除程式設定的鋼板擦拭週期外可選擇Clean Screen來啟動擦拭鋼板動作.除程式設定的錫膏攪拌週期外可選擇Knead Paste來啟動攪拌錫膏動作.如有安裝擠壓式刮刀頭選用配備則錫膏添加功能將取消.選擇Paste Load添加錫膏有兩種方式(自動加錫和手動加錫).13添加錫膏锡膏和溶剂. 当使用或处理任何锡膏或溶剂必须严格地遵守制造商的标准安全注意事项.防护衣物. 当处理锡膏和溶剂时随即穿戴合格的防护衣物来减少挥发气体的吸入,眼睛及皮肤的接触与摄取.手動添加1. 觸壓Manual Load (F2).‘打開前蓋並添加錫膏’訊息會顯示在螢幕上2. 打開前方印刷頭蓋.3. 添加錫膏到鋼板上.4. 關上前方印刷頭蓋.5. 按下System紐.146. 觸壓Continue (F1).7. 觸壓Exit (F8).自動添加1. 觸壓Auto Dispense (F1).錫膏添加器將執行錫膏自動添加作業.2. 觸壓Exit (F8).15溶劑重新補充溶劑至溶劑桶建议溶剂. 任何溶剂的使用必须符合当地环保规章.DEK推荐使用环保认可的溶剂,换句话说无CFC与含水基成分.使用的溶剂必须拥有快速挥发速率及闪火点规格高于39o C的特性.溶剂溶液. 勿将不同溶剂的溶液混合.当更换另一种不同溶剂时必须彻底冲洗干净溶剂桶.1617重新補充溶劑至溶劑桶: 1. 觸壓Head (F2).2. 使用雙控制鈕抬起印刷頭.4. 小心旋開溶劑蓋子使蒸氣壓力消去.5. 打開蓋子使用漏斗重新補充溶劑.易燃性. 存在易燃性物质.应远离热,燃烧源与静电放电.于通风良好区域使用溶剂喷洒. 钢板擦拭清洁器喷洒一细微溶剂溶液喷射带在清洁器纸卷上.应穿著经认可之防护衣物从事作业.受压容器. 溶剂桶是充满压力的状态;在打开溶剂桶注入盖前必须先释放压力.3. 裝上印刷頭支撐桿186. 旋緊蓋子.7. 觸壓Prime Solvent (F6).‘同時按壓兩控制鈕來汲取溶劑’ 訊息會顯示在螢幕上. 8. 使用螢幕兩旁控制鈕來汲取溶劑.9. 移開印刷頭支撐桿並歸回原位.12. 按下System 鈕.10. 觸壓Head (F2).11. 使用雙控制鈕放下印刷頭.19物品更换卷紙1. 觸壓Head (F2).2. 使用雙控制鈕抬起印刷頭.4. 小心移開髒污的紙卷.5. 裝上新紙卷並依照下圖路徑纏繞: 易燃性. 使用過之紙卷含有鋼板擦拭清潔器溶劑及錫膏的殘留物.參考製造供應商所建議的拋棄處理指示. 防護衣物. 當處理錫膏和溶劑時隨即穿戴合格的防護衣物來減少揮發氣體的吸入,眼睛及皮膚的接觸與攝取.3. 裝上印刷頭支撐桿上一页下一页。
dek印刷机调机教材

DEK印刷机调机教材1.正确了解程序中的每一参数在生产过程中,我们在做新程序的过程中,目前的做法是在一个老的程序的基础上进行“修改”而获得我们所需要的程序,尽管如此,我们还是有必要了解在SETUP状态下EDIT菜单中各项参数的含义和使用、调整方法。
∙Product Name 产品名称,最多可接受不包含标点的8个字符。
∙Product ID 是对产品的说明性文字,没有实质性意义,最多32个字符,屏幕会显示头20个字符。
∙Product Barcode 产品条形码,最长20个字符。
目前我们没有使用。
(仅265GSX 可使用)∙Screen barcode 对应产品的钢网的条形码,目前我们没有使用。
(265GSX )∙Dwell Height 刮刀停留高度(主要用于观察滚动条的情况)最小 5mm 最大40mm增量 1mm 缺省 30mm∙Dwell Speed 刮刀运动到Dwell高度的速度最小 10mm/sec 最大 30mm/sec增量1mm/sec 缺省 24mm/sec∙Screen Adapter 钢网类别,选项有NONE,255,SANYO,HERAEUS,20X20,12X12∙Screen Image 钢网框架定位选择,有EDGE和CENTRE两个选项,其中EDGE 只适用于SANYO和FUJI钢网框。
∙Custom Screen 用于对钢网位置的定义和调整,我们多数情况使用DISABLED。
∙Board Width 板宽,40--508mm,增量0.1mm∙Board Length 板长,50--510mm,增量0.1mm∙Board Thickness 板厚,0.20--6.0mm,增量0.01mm∙Print Speed 印刷速度,2--150mm/sec,增量1mm/sec∙Flood Speed 未用∙Print Front Limit 从板的前边沿到印刷起点位置的距离,0--板宽,缺省0mm∙Print Rear Limit 从板的后边沿到印刷起点位置的距离,0--板宽,缺省0mm∙Front Pressure 前刮刀压力,0--20kg,增量0.2kg∙Rear Pressure 后刮刀压力,0--20kg,增量0.2kg∙Flood Height 未用∙Print Gap 在印刷时,PCB板和钢网之间的间隙,0-6mm,增量0.025mm∙Underside Clearance 定义PCB板底面和机器顶针顶端间的距离,主要是针对底面有元件的板而言。
DEK基本操作说明书
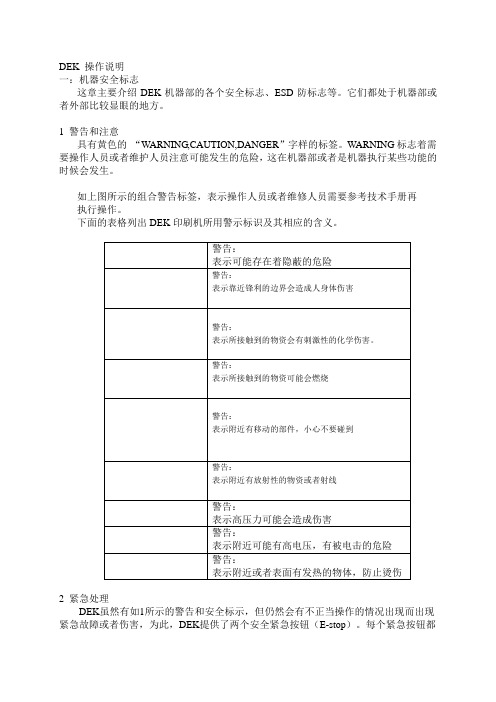
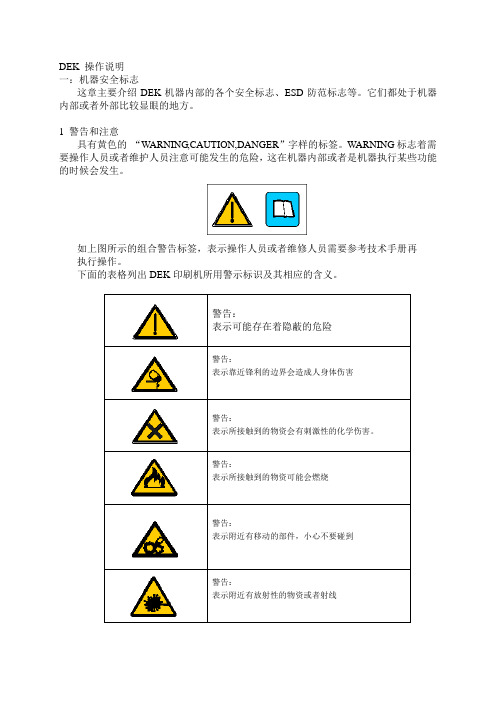
DEK 操作说明一:机器安全标志这章主要介绍DEK机器部的各个安全标志、ESD防标志等。
它们都处于机器部或者外部比较显眼的地方。
1 警告和注意具有黄色的“WARNING,CAUTION,DANGER”字样的标签。
WARNING标志着需要操作人员或者维护人员注意可能发生的危险,这在机器部或者是机器执行某些功能的时候会发生。
如上图所示的组合警告标签,表示操作人员或者维修人员需要参考技术手册再执行操作。
下面的表格列出DEK印刷机所用警示标识及其相应的含义。
2 紧急处理DEK虽然有如1所示的警告和安全标示,但仍然会有不正当操作的情况出现而出现紧急故障或者伤害,为此,DEK提供了两个安全紧急按钮(E-stop)。
每个紧急按钮都能使机器急停,从而避免伤害。
如图所示,在机器前台的两端都有红色的按钮就是E-stop。
图1 紧急按钮位置二机器概述1如图所示为机器外部概貌①机器控制屏幕(Main Control Screen)②两侧的控制按钮(Two Button Control)③小鼠标(Mouse Trackball)④键盘(Keyboard)⑤系统启动按钮(System Button)⑥红色紧急按钮(Emergency Stop Button,E-stop)⑦主电源开关(Main Isolator)⑧印刷监控灯(Paste Roll Lamp)⑨机器状态灯(Tricoloured Beacon)2 机器控制屏幕的两种显示方式,如图所示Type1①印刷标题栏(Printe Title)②制程参数窗口(Process Parameter)③消息提示栏(Message Prompt)④主菜单(Main Menu)⑤视频窗口(Vision Data)⑥警告消息窗口(Warning Message)⑦印刷状态窗口(Printer Status)Type2①制程参数窗口(Process Parameter)②机器参数窗口(Machine Parameter)③消息提示栏(Message Prompt)④主菜单(Main Menu)⑤视频窗口(Vision Data)⑥警告消息窗口(Warning Message)⑦印刷状态窗口(Printer Status)⑧印刷标题栏(Printe Title)这两种方式可以通过Zoom in或者Zoom out来转换。
DEK基本操作说明
DEK基本操作说明DEK是一种由斯坦福大学开发的短文本生成模型,能够生成高质量的文本内容。
该模型通过深度学习技术来生成文本,可以用于文本生成、翻译、摘要等多种自然语言处理任务。
DEK模型训练有素,能够产生准确、流畅的文本内容,广泛应用于各种领域。
一、DEK模型训练1.准备数据集:在进行DEK模型训练之前,需要准备一个用于训练的文本数据集。
数据集可以是任何文本内容,比如新闻文章、博客内容、电子书等。
数据集应该包括大量的文本内容,以便训练模型时能够学习到足够的信息。
2.配置模型参数:在进行DEK模型训练之前,需要配置模型的参数,包括模型的层数、隐藏层大小、学习率等。
这些参数会影响模型的性能,需要根据具体任务的需求来调整。
3.训练模型:使用准备好的数据集和配置好的参数,开始训练DEK模型。
训练过程会持续一段时间,需要等待模型收敛并获得较好的性能结果。
4.保存模型:训练完成后,需要保存模型的参数和权重,以便后续进行文本生成或其他任务时使用。
二、文本生成1. 加载模型:在进行文本生成之前,需要加载之前训练好的DEK模型。
可以使用Python等编程语言来加载模型。
2.输入文本:输入一个文本提示,作为生成文本的输入。
可以是一个句子、一个段落或一篇文章,用来引导模型生成相关内容。
3.生成文本:调用加载的模型进行文本生成,根据输入文本生成相应的文本内容。
DEK模型会自动学习输入文本的语义和风格,并生成符合输入文本风格的内容。
4.输出结果:将生成的文本内容输出到屏幕、文件等,查看生成的文本内容。
可以根据需要对生成的文本内容进行进一步处理,比如摘要、翻译等。
三、调参优化1.调整模型参数:根据实际任务需求和数据情况,可以调整模型的参数来优化模型性能。
比如增加模型的层数、调整学习率等。
2.增加数据量:增加训练数据量可以提升模型的泛化能力,使模型在生成文本时更加准确。
3. Fine-tuning:对已训练好的模型进行Fine-tuning可以进一步提升模型性能,使其适应特定任务的需求。
DEK 中文操作说明书
B I G邦扬国际股份有限公司BIG: Leo Wang265 Infinity/Horizon/ELA 操作说明书人机界面(OPERATOR/MACHINE INTERFACE):这个界面介于机器与操作者之间来完成动作,其所使用的两个显示器位于机器之右上方,由八个功能键来控制机器,位于右边彩色萤幕下面或位于触控萤幕下方,这些功能键用时加以说明在显示器上,所有机器的功能操作可由功能键快速的进入,或者由键盘输入作为选择,功能键与键盘F1-F8是相同的作用。
(图1)(图1)印刷机状态(Printer Status):状态(Status): 标明目前印刷机的状态; 待机(Ready)模式(Mode): 标明目前印刷机的模式; 自动(Auto); 单片(Single); 单一步(Step); 不印刷(No Print)可当输送带使用操作员(Operator): 可登录可不登录 生产程式(Product): 生产程式名称资料登录(Data Logging): 可启动可不启动远端监控(Host Comms): 选配功能可启动可不启动 温度(Temperature): 机器内部温度显示 周期时间(Cycle Time): 印刷周期时间显示12345671穿越时间(Throughput): 生产周期时间显示 软体版本(SW Version):机器版本显示生产参数(Process Parameters): 印刷模式(Printer Mode):前刮刀印刷速度(Front Printer Speed): 前刮刀印刷速度显示 后刮刀印刷速度(Rear Printer Speed): 后刮刀印刷速度显示 前刮刀压力(Front Pressure): 前刮刀压力显示 后刮刀压力(Rear Pressure): 后刮刀压力显示 脱模速度(Separation Speed): 脱模速度显示数量(Rates):批次数量(Batch Count/Limit): 显示此批生产数量生产板数(Board Count/Limit):显示已生产数量清洁钢板次数1(Clean 1 Count/Rate): 显示清洁钢板次数模组1 清洁钢板次数2(Clean 2 Count/Rate): 显示清洁钢板次数模组2 刮刀印刷方向(Print Direction): 显示刮刀印刷方向 影像视窗: 同时监看钢板及PC 板的视觉点(Fiducial mark) 系统关闭键 影像视窗放大/缩小键 功能操作键●265 INFINITY/HORIZON/ELA 画面:这个资讯显示机器的状态,使用者可以设定显示的方式,可以在编辑的项目(Edit data),在Display Type 的项目有Type1与Type2两种可以设定265INFINITY/HORIZON/ELA 画面。
DEK参数中文解释
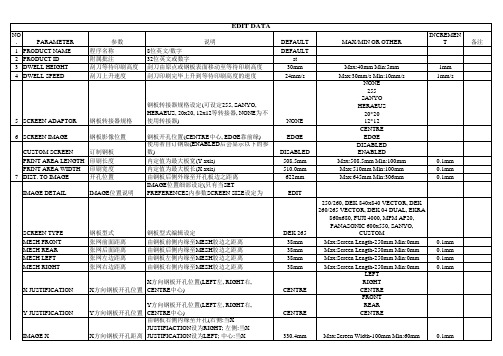
IMAGE Y Y方向钢板开孔距离由钢板前侧内缘至开孔(前侧:当YJUSTIFIACTION设为FRONT; 后侧:当YJUSTIFICATION设为REAR; 中心:当Y330.4mm Max:Screen Width-100mm Min:60mm0.1mmBARCODE Y Y方向条形码距离由钢板后侧外缘至条形码中心之距离97mm Max:Screen Length-10mm Min:10mm0.1mm9BOARD WIDTH PC板宽度实际PC板宽度(Y axis), 最大与最小值因钢板型式及是否安装REMOTE DOARD STOP而定250mm265 Max:508.5mm Min:40.5mm255 Max:432mm Min:40.5mm249 Max:330mm Min:40.5mmFUJI Max:460mm Min:40.5mmSANYO Max:284mm Min:40.5mmHERAEUS Max:344mm Min:40.5mmREMOTE BOARD STOP FITTEDMax:508.5mm Min:130mm0.1mm10BOARD LENGTH PC板长度实际PC板长度(X axis), 最大与最小值因钢板型式及是否安装REMOTE DOARD STOP而定(当开启620mm Board选项时最大值可达620mm,而可处理的板长甚至可达664mm)250mm265 Max:510mm Min:50mm255 Max:460mm Min:50mm249 Max:430mm Min:50mmFUJI Max:460mm Min:50mmSANYO Max:420mm Min:50mmHERAEUS Max:344mm Min:50mmREMOTE BOARD STOP FITTEDMax:510mm Min:50mm0.1mm参考FeatureLicense工作表11BOARD THICKNESS PC板厚度实际PC板厚度(Z axis), 如被重新设定会自动调整Table行程以维持固定Vision Height 及 Print 1.6mm Max:6mm Min:0.2mm0.1mm12FRONT PRINT SPEED后刮刀往前印刷速度后刮刀印刷速度设定100mm/s Max:150mm/s Min:2mm/s1mm/s参考Feature License工作表13REAR PRINT SPEED前刮刀往后印刷速度前刮刀印刷速度设定100mm/s Max:150mm/s Min:2mm/s1mm/s参考Feature License工作表14FWD START SPEED 挤压式刮刀头前印起始速度挤压式刮刀头前印起始速度设定(从起始到终止速度为线性增加或减少,只有在SETPREFERENCES内参数ADVANCED PROFLOW设为ENABLED时才有)100mm/s Max:150mm/s Min:2mm/s1mm/s07SP03以上15FWD END SPEED 挤压式刮刀头前印终止速度挤压式刮刀头前印终止速度设定,只有在SETPREFERENCES内参数ADVANCED PROFLOW设为ENABLED时才有)100mm/s Max:150mm/s Min:2mm/s1mm/s07SP03以上16RWD START SPEED 挤压式刮刀头后印起始速度挤压式刮刀头后印起始速度设定(从起始到终止速度为线性增加或减少,只有在SETPREFERENCES内参数ADVANCED PROFLOW设为ENABLED时才有)100mm/s Max:150mm/s Min:2mm/s1mm/s07SP03以上817RWD END SPEED 挤压式刮刀头后印终止速度挤压式刮刀头后印终止速度设定,只有在SETPREFERENCES内参数ADVANCED PROFLOW设为ENABLED时才有)100mm/s Max:150mm/s Min:2mm/s1mm/s07SP03以上18FLOOD SPEED铺印速度刮刀铺印速度设定30mm/s Max:150mm/s Min:10mm/s1mm/s19PRINT FRONT LIMIT前刮刀冲程起始点内定值0mm为距离板边30mm位置(负值往外加大冲程,正值往内减少冲程;当使用PASTETRAILS功能或PROFLOW时Min值会变为0mm)0mmMax:Board Width,假设设定Amm Min:-6.5mm0.1mm20PRINT REAR LIMIT后刮刀冲程起始点内定值0mm为距离板边30mm位置(负值往外加大冲程,正值往内减少冲程;当使用PASTETRAILS功能或PROFLOW时Min值会变为0mm)0mm Max:(Board Width-A)mm Min:-6.5mm0.1mm21TRANSFER HEAD SIZE(PROFLOWCASSETTE)挤压式刮刀头尺寸挤压式刮刀头尺寸大小设定300mm Max:500mm Min:150mm50mm22STENCIL PROTECTION钢板保护模式使用挤压式刮刀头时PCB及Board Clamp外钢板支撑设定ONONOFF23(PROFLOW) (SYSTEM)PRESSURE挤压式刮刀头压力挤压式刮刀头作用钢板之压力设定0kg Max:20kg Min:0kg0.2kg24PASTE PRESSURE 挤压式刮刀头内锡膏压力当搅拌或印刷时挤压式刮刀头内挤压锡膏之压力设定(当系统装设有SCAR时此参数才会出现)2bar Max:4bar Min:0.2bar0.2bar25IDLE PRESSURE 挤压式刮刀头内持衡压力当搅拌或印刷后维持挤压式刮刀头内挤压锡膏之压力设定(当系统装设有SCAR时此参数才会0bar Max:4bar Min:0.2bar0.2bar26FRONT PRESSURE前刮刀压力前刮刀压力设定5kg Max:20kg Min:0kg0.2kg 27REAR PRESSURE后刮刀压力后刮刀压力设定5kg Max:20kg Min:0kg0.2kg28KNEAD DEPOSITS锡膏搅拌来回次数设定一片板子的来回搅拌次数(执行完搅拌次数后系统会再执行印刷动作及次数才算完成搅拌1Max:1000 Min:1129FLOOD HEIGHT铺印高度铺印高度设定0mm Max:5mm Min:0mm0.02mm 30KNEAD BOARDS搅拌片数连续搅拌片数设定1Max:10 Min:1131KNEAD OFF-IMAGE 挤压式刮刀头锡膏搅拌位置挤压式刮刀头锡膏搅拌位置设定(ENABLED为钢板开孔外搅拌, DISABLED为经过开孔搅拌)DISABLEDENABLEDDISABLED32PASTE KNEADPERIOD启动搅拌锡膏等待时间设定设定停机或待机多久后自动做搅拌锡膏动作,与KNEAD DEPOSITS和KNEAD BOARDS配合执0mins Max:30mins Min:0mins1mins33KNEAD BEFOREPRINT挤压式刮刀头印刷前搅拌锡膏频率每印刷几片做挤压式刮刀头印刷前搅拌锡膏动作0 Boards Max:100 Boards Min:0 Boards 1 Boards34KNEAD AFTERREPLENISH挤压式刮刀头补充锡膏后搅拌锡膏设定挤压式刮刀头补充锡膏后搅拌锡膏与否DISABLEDENABLEDDISABLED35CLEAN AFTER KNEAD锡膏搅拌后清洁模式挤压式刮刀头锡膏搅拌过后机器会进行自动擦拭DISABLEDDISABLEDMODE 1MODE 236PRINT GAP印刷间隙印刷状态下钢板与PC板的间隙(0为接触式印刷,0以外为非接触式印刷,亦为自动慢速脱模)0mm Max:6mm Min:0mm0.025mm37UNDER CLEARANCE下方净空高度印刷生产中Table待板高度(Table上支撑模块表面与PC板底面的距离,可节省CYCLE TIME)19mm Max:42mm Min:3mm0.1mm。
dek中文版操作手册
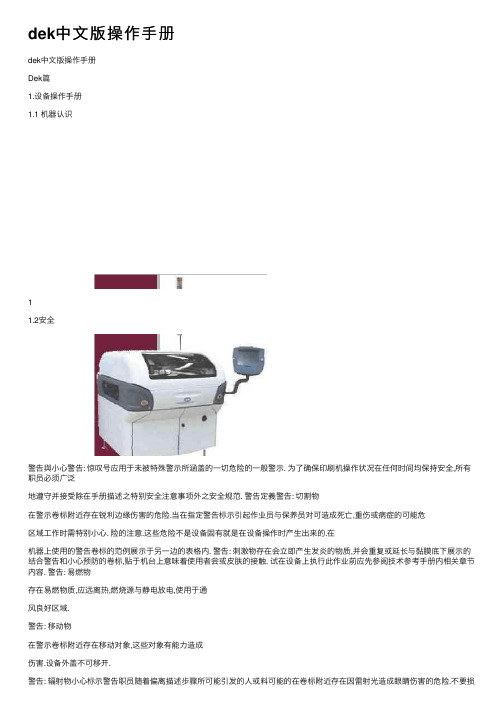
dek中⽂版操作⼿册dek中⽂版操作⼿册Dek篇1.设备操作⼿册1.1 机器认识11.2安全警告與⼩⼼警告: 惊叹号应⽤于未被特殊警⽰所涵盖的⼀切危险的⼀般警⽰. 为了确保印刷机操作状况在任何时间均保持安全,所有职员必须⼴泛地遵守并接受除在⼿册描述之特别安全注意事项外之安全规范. 警告定義警告: 切割物在警⽰卷标附近存在锐利边缘伤害的危险.当在指定警告标⽰引起作业员与保养员对可造成死亡,重伤或病症的可能危区域⼯作时需特别⼩⼼. 险的注意.这些危险不是设备固有就是在设备操作时产⽣出来的.在机器上使⽤的警告卷标的范例展⽰于另⼀边的表格内. 警告: 刺激物存在会⽴即产⽣发炎的物质,并会重复或延长与黏膜底下展⽰的结合警告和⼩⼼预防的卷标,贴于机台上意味着使⽤者尝或⽪肤的接触. 试在设备上执⾏此作业前应先参阅技术参考⼿册内相关章节内容. 警告: 易燃物存在易燃物质,应远离热,燃烧源与静电放电,使⽤于通风良好区域.警告: 移动物在警⽰卷标附近存在移动对象,这些对象有能⼒造成伤害.设备外盖不可移开.警告: 辐射物⼩⼼标⽰警告职员随着偏离描述步骤所可能引发的⼈或料可能的在卷标附近存在因雷射光造成眼睛伤害的危险.不要损害.⼩⼼标⽰并不意味对职员的危险. 直视光源或物体表⾯之直接反射光.⼀个⼩⼼标⽰的例⼦如下: 警告: 受压物⾼压存在并可能造成伤害.不要企图直接开启系统⾄⼩⼼⼤⽓下.摄影机损毁..不要留下任何未⽤治具于升降平台的后轨道后⽅区域. 如有任何物体留在升降平台的PC板印刷区域外,当平台上升⾄印刷警告: 电⼒危险⾼电压存在并可能造成伤害或死亡.不要从设备外罩⾼度时,它将可能与摄影机相撞.移除保护盖或不顾保护装置.21.3设备概观範圍這⼿冊應由適當訓練過的設備操作⼈員來使⽤.對於設備的⼀般操作狀況它是個快速⼊⾨指南.關於設備設定更深⼀層的資訊則總括到技術參考⼿冊項次說明觸控式螢幕 1系統按鈕 2滑⿏ 3雙按鈕控制 4 鍵盤 5主電源開關 6 緊急開關按鈕 7 錫膏滾動燈 8 三⾊燈 9 當機器啟動電源後,按下兩紅⾊緊急開關中任⼀能以受控⽅式使機器停⽌31.4⼈机接⼝狀態⾴模式2在主要控制螢幕上所顯⽰的資訊為狀態⾴.狀態⾴有兩種版本顯⽰模式.可在Set Prefs選單內Display Type螢幕顯⽰模式做選擇模式1項次說明製程參數視窗 1設備參數視窗 2訊息提⽰帶 3項次說明項⽬單 4 印刷機主題視窗視覺資料視窗 1 5警告訊息視窗 6 製程參數視窗 2印刷機狀態視窗 7 訊息提⽰帶 3 印刷機主題視窗 8 項⽬單 4 在觸控式螢幕上觸壓相關的項⽬圖像便能完成功能選視覺資料視窗 5擇.另⼀種選擇⽅式是藉由鍵盤上功能鍵F1到F8來做警告訊息視窗 6 選擇印刷機狀態視窗 74視覺資料視窗可利⽤在狀態⾴上的Zoom In或 Zoom Out 圖像來改變視覺資料視窗的⼤⼩.51.5三⾊灯此訊息燈顯⽰設備的作動狀態.設備無法作動系統電源關閉錯誤訊息顯⽰設備未在準備狀態作動狀態燈號顏⾊設備在初始化設備在設定中設備在維護下設備提⽰操作者注意卡匣錫膏不⾜擦拭紙卷⽤盡擦拭溶劑耗盡設備可作動設備在就緒狀態等待61.6 开机与登⼊3. 觸壓Monitor (鍵盤上F7功能鍵). 1. 旋轉主電源開關⾄ON處.4. 觸壓Log On (F1).2. 設備提⽰時按壓System鈕.操作員登⼊視窗顯⽰:已選好的狀態⾴模式會與下列功能選單⼀起顯⽰:使⽤鍵盤輸⼊操作員I.D.後按下Enter 鍵.5. 觸壓Exit (F8).71.7产品换线新產品 4. 觸壓Load (F1).1. 觸壓Setup (F6).5. 觸壓Change Screen (F5). 2. 觸壓Load Data (F2).選定的檔案會顯⽰在狀態⾴.儲存於設備內所有產品檔案表會顯⽰出來: 6. 系統提⽰時掀起前⽅印刷頭蓋.3. 使⽤Left, Right, Up和Down (F4, F5, F6和F7) 反⽩所需檔案.87. 移出钢板. 10. 按下System 鈕.11. 触压Change Screen (F5).8. 加载新钢板到机器内并确保正确⽅位与开孔位置.12. 触压Change Tooling (F6).13. 触压Head (F2).9. 放下前⽅印刷頭蓋. 14. 使⽤双控制钮抬起印刷头.915. 装上印刷头⽀撑杆 16. 调整PC板⽀撑器⾄适合产品位置来准备印刷. PC板夾板器. 當在機器⽀撐器置放區作業時需極端⼩17. 移开印刷头⽀撑杆并归回原位. ⼼夾板系統且必須經過練習以避免傷害.在前⽅和後⽅夾板系統上的⾦屬薄⽚是⾮常鋒利的DEK建議只有操作員能更換磁性⽀撐桿.使⽤其它⽀撐器或許需要變更PC板狀態檔.⼩⼼攝影機損毀..不要留下任何未⽤治具於升降平台的後軌道18. 触压Head (F2).後⽅區域.如有任何物體留在升降平台的PC板印刷區域外,當平台上升⾄印刷⾼度時,它將可能與攝影機相撞.1019. 使⽤雙控制鈕放下印刷頭.20. 按下System紐.21. 触压Exit (F8).22. 觸壓Exit (F8).111.8印刷参数调整⾃動模式批量印刷1. 觸壓Setup (F6). 1. 觸壓Monitor (F7).2. 觸壓Mode (F1) 直到Auto出現在狀態⾴的模式選項上 2. 觸壓Batch Limit (F4).3. 觸壓Exit (F8). 批量計數極值視窗會顯⽰在螢幕上:4. 觸壓Run (F1). 3. 使⽤微調鍵Incr.及Decr. (F6和F7) 可設定所需批量數.印刷機將連續不斷地運作. 4. 觸壓Exit (F8).12除程式設定的鋼板擦拭週期外可選擇Clean Screen來啟動擦拭5. 触压Exit (F8). 鋼板動作.6. 触压Run (F1).除程式設定的錫膏攪拌週期外可選擇Knead Paste來啟動攪拌錫膏動作.印刷選單當設備於⾃動模式下運作時會顯⽰下列選單:如有安裝擠壓式刮⼑頭選⽤配備則錫膏添加功能將取消.選擇Paste Load添加錫膏有兩種⽅式 (⾃動加錫和⼿動加錫).选择 End Run可停⽌印刷机于完成该印刷周期选择 Stop Cycle将⽴即停⽌印刷在印刷期間的任何階段皆能啟⽤下述功能錫膏添加擦拭鋼板參數調整攪拌錫膏調整檢查作業員不應該使⽤參數調整及調整檢查.133. 添加錫膏到鋼板上. 添加錫膏锡膏和溶剂. 当使⽤或处理任何锡膏或溶剂必须严格地遵守制造商的标准安全注意事项.防护⾐物. 当处理锡膏和溶剂时随即穿戴合格的防护⾐物来减少挥发⽓体的吸⼊,眼睛及⽪肤的接触与摄取.4. 關上前⽅印刷頭蓋. ⼿動添加1. 觸壓Manual Load (F2).‘打開前蓋並添加錫膏’ 訊息會顯⽰在螢幕上2. 打開前⽅印刷頭蓋.5. 按下System紐.146. 觸壓Continue (F1).7. 觸壓Exit (F8).⾃動添加1. 觸壓Auto Dispense (F1).錫膏添加器將執⾏錫膏⾃動添加作業.2. 觸壓Exit (F8).15溶劑重新補充溶劑⾄溶劑桶建议溶剂. 任何溶剂的使⽤必须符合当地环保规章. DEK推荐使⽤环保认可的溶剂,换句话说⽆CFC与含⽔基成分.使⽤的溶剂必须拥有快速挥发速率及闪⽕o点规格⾼于39C的特性. 溶剂溶液. 勿将不同溶剂的溶液混合.当更换另⼀种不同溶剂时必须彻底冲洗⼲净溶剂桶.16易燃性. 存在易燃性物质.应远离热,燃烧源与静电放电.3. 裝上印刷頭⽀撐桿于通风良好区域使⽤溶剂喷洒. 钢板擦拭清洁器喷洒⼀细微溶剂溶液喷射带在清洁器纸卷上.应穿著经认可之防护⾐物从事作业.受压容器. 溶剂桶是充满压⼒的状态;在打开溶剂桶注⼊盖前必须先释放压⼒.4. ⼩⼼旋開溶劑蓋⼦使蒸氣壓⼒消去. 重新補充溶劑⾄溶劑桶:1. 觸壓Head (F2).2. 使⽤雙控制鈕抬起印刷頭.5. 打開蓋⼦使⽤漏⽃重新補充溶劑.176. 旋緊蓋⼦. 9. 移開印刷頭⽀撐桿並歸回原位.7. 觸壓Prime Solvent (F6).10. 觸壓Head (F2).‘同時按壓兩控制鈕來汲取溶劑’ 訊息會顯⽰在螢幕上.8. 使⽤螢幕兩旁控制鈕來汲取溶劑. 11. 使⽤雙控制鈕放下印刷頭.12. 按下System鈕.18物品更换卷紙 3. 裝上印刷頭⽀撐桿易燃性. 使⽤過之紙卷含有鋼板擦拭清潔器溶劑及錫膏的殘留物.參考製造供應商所建議的拋棄處理指⽰.防護⾐物. 當處理錫膏和溶劑時隨即穿戴合格的防護⾐物來減少揮發氣體的吸⼊,眼睛及⽪膚的接觸與攝取.4. ⼩⼼移開髒污的紙卷.1. 觸壓Head (F2). 5. 裝上新紙卷並依照下圖路徑纏繞:2. 使⽤雙控制鈕抬起印刷頭.項次說明擦拭紙卷 1收集紙桿 2196. 觸壓Prime Paper (F5). 10. 使⽤雙控制鈕放下印刷頭. ‘按壓兩控制鈕來進紙’ 訊息會顯⽰在螢幕上.7. 使⽤螢幕兩旁控制鈕捲動紙卷確保紙能正確地供給. 11. 按下System鈕.刮⼑8. 移開印刷頭⽀撐桿並歸回原位. 1. 觸壓Setup (F6). 2. 觸壓Setup Squeegee (F4). 9. 觸壓Head (F2). 203. 觸壓Change Squeegee (F1). 8. 觸壓Continue (F1).4. 打開前⽅印刷頭蓋.刮⼑參考⾼度9. 觸壓Calibrat Heights (F2).‘在開始進⾏壓⼒校正前先移出鋼板’ 訊息會顯⽰在螢幕上. 5. 換上所需的刮⼑6. 關上前⽅印刷頭蓋 10. 觸壓Exit (F8).11. 觸壓Change Screen (F5).7. 按下System鈕.‘移出鋼板’ 訊息會顯⽰在螢幕上.2115. 按下System鈕. 12. 打開前⽅印刷頭蓋.16. 觸壓Setup Squeegee (F4).13. 移出鋼板.17. 觸壓Calibrat Heights (F2).‘確保安裝正確的刮⼑’ 訊息會顯⽰在螢幕上. 14. 關上前⽅印刷頭蓋 18. 觸壓Continue (F1).‘壓⼒⾼度校正中-勿開啟前蓋’ 訊息會顯⽰在螢幕上.19. 觸壓Exit (F8).2223. 關上前⽅印刷頭蓋 20. 觸壓Change Screen (F5).‘插⼊鋼板並重試’ 訊息會顯⽰在螢幕上.21. 打開前⽅印刷頭蓋.24. 按下System鈕.22. 載⼊鋼板到印刷機內並確保正確⽅位與開孔位置. 25. 觸壓Change Screen (F5).26. 觸壓Exit (F8).231.9注销与关机1. 觸壓Monitor (F7). 5. 當被提⽰確認是否關機.2. 觸壓Log Off (F1).6. 當螢幕顯⽰’現在關閉你的電腦是安全的’ 訊息時,旋轉主電源開關⾄OFF位置3. 觸壓Exit (F8).4. 觸壓狀態⾴上Close System圖像.24错误讯息下述表格列出在正常印刷操作下可能發⽣的錯誤訊息,可能原因及解決⽅法.完整版的設備錯誤訊息在技術參考⼿冊中.補充鋼板清潔擦拭系統溶劑. 鋼板清潔擦拭系統溶劑不⾜清潔溶劑不⾜需要補充.鋼板清潔擦拭系統紙卷需要更換鋼板清潔擦拭系統紙卷. 無清潔擦拭紙更換.錫膏筒內無錫膏/擠壓錫膏添加器錫膏筒內無錫膏更換錫膏添加器內錫膏筒. 式刮⼑頭錫膏卡匣內補充/更換擠壓式刮⼑頭內錫膏卡匣. 或擠壓式刮⼑頭錫膏卡匣必錫膏量不⾜須補充更換.軌道上升異常,檢查⽀在升降平台上有⽀撐器/物體打開前⽅印刷頭蓋移出在升降平台上軌道下的⽀撐器頂撞到軌道下⽅. 撐器或物體.系統斷電印刷頭蓋掀起或E Stop觸壓. 關上印刷頭蓋.釋放E Stop紐關上印刷頭蓋. 前蓋打開時系統暫停印刷頭蓋掀起.PC板未到達定位或印刷完打開前⽅印刷頭蓋,鬆開夾板器並將PC板從軌道內PC板停在軌道上成後未送出板⼦. 移出.25下⾯是赠送的企业管理名句100,欢迎欣赏关于企业管理的名⾔名句5、对产品质量来说,不是100分就是0分。
DEK基本操作说明
DEK 操作说明一:机器安全标志这章主要介绍DEK机器内部的各个安全标志、ESD防范标志等。
它们都处于机器内部或者外部比较显眼的地方。
1 警告和注意具有黄色的“WARNING,CAUTION,DANGER”字样的标签。
WARNING标志着需要操作人员或者维护人员注意可能发生的危险,这在机器内部或者是机器执行某些功能的时候会发生。
如上图所示的组合警告标签,表示操作人员或者维修人员需要参考技术手册再执行操作。
下面的表格列出DEK印刷机所用警示标识及其相应的含义。
警告:表示可能存在着隐蔽的危险警告:表示靠近锋利的边界会造成人身体伤害警告:表示所接触到的物资会有刺激性的化学伤害。
警告:表示所接触到的物资可能会燃烧警告:表示附近有移动的部件,小心不要碰到警告:表示附近有放射性的物资或者射线—警告:表示高压力可能会造成伤害警告:表示附近可能有高电压,有被电击的危险警告:表示附近或者表面有发热的物体,防止烫伤2 紧急处理DEK虽然有如1所示的警告和安全标示,但仍然会有不正当操作的情况出现而出现紧急故障或者伤害,为此,DEK提供了两个安全紧急按钮(E-stop)。
每个紧急按钮都能使机器急停,从而避免伤害。
如图所示,在机器前台的两端都有红色的按钮就是E-stop。
图1 紧急按钮位置二机器概述1如图所示为机器外部概貌①机器控制屏幕(Main Control Screen)②两侧的控制按钮(Two Button Control)③小鼠标(Mouse Trackball)④键盘(Keyboard)⑤系统启动按钮(System Button)⑥红色紧急按钮(Emergency Stop Button,E-stop)⑦主电源开关(Main Isolator)⑧印刷监控灯(Paste Roll Lamp)⑨机器状态灯(Tricoloured Beacon)2 机器控制屏幕的两种显示方式,如图所示Type1①印刷标题栏(Printe Title)②制程参数窗口(Process Parameter)③消息提示栏(Message Prompt)④主菜单(Main Menu)⑤视频窗口(Vision Data)⑥警告消息窗口(Warning Message)⑦印刷状态窗口(Printer Status)Type2①制程参数窗口(Process Parameter)②机器参数窗口(Machine Parameter)③消息提示栏(Message Prompt)④主菜单(Main Menu)⑤视频窗口(Vision Data)⑥警告消息窗口(Warning Message)⑦印刷状态窗口(Printer Status)⑧印刷标题栏(Printe Title)这两种方式可以通过Zoom in或者Zoom out来转换。
DEK 中文操作说明书
溫度(Temperature): 機器內部溫度顯示
週期時間(Cycle Time): 印刷週期時間顯示
2/34
穿越時間(Throughput): 生產週期時間顯示 軟體版本(SW Version):機器版本顯示 2 生產參數(Process Parameters): 印刷模式(Printer Mode): 前刮刀印刷速度(Front Printer Speed): 前刮刀印刷速度顯示 後刮刀印刷速度(Rear Printer Speed): 後刮刀印刷速度顯示 前刮刀壓力(Front Pressure): 前刮刀壓力顯示 後刮刀壓力(Rear Pressure): 後刮刀壓力顯示 脫模速度(Separation Speed): 脫模速度顯示 3 數量(Rates): 批次數量(Batch Count/Limit): 顯示此批生產數量 生產板數(Board Count/Limit): 顯示已生產數量 清潔鋼板次數 1(Clean 1 Count/Rate): 顯示清潔鋼板次數模組 1 清潔鋼板次數 2(Clean 2 Count/Rate): 顯示清潔鋼板次數模組 2 刮刀印刷方向(Print Direction): 顯示刮刀印刷方向 4 影像視窗: 同時監看鋼板及 PC 板的視覺點(Fiducial mark)
支撐器是紅色本體,內部由一彈簧支撐及移動,將印刷頭昇起來將支撐器放在機器左手邊的機 器電磁線圈座裏,確定黑色末端朝下銀色末端朝上。(圖 6)
(圖 6)
(圖 7)
高電壓的預防(PROTECTION FROM HIGH VOLTAGE):
機械(Mechanisms):
機器屬於第一級數的電性防護依照 IEC536 的要 1:1993 所有機器在出貨前必須接受電路安全
【最新资料】dek印刷精度cpk统计与调整分析
DEK印刷精度CPK统计与调整分析内容提要:DEK印刷机状态监控主要监控参数是印刷X、Y、,刮刀压力、RISINGTABLE高度,本文主要对DEK印刷机印刷X、Y、CPK统计过程原理和改善过程方法进行分析,介绍DEK印刷机关键参数监控过程中用到的一些经验和学到一些的知识。
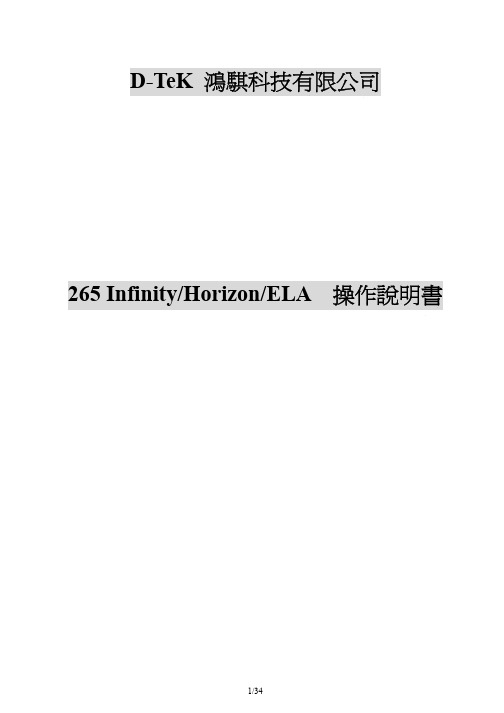
主题词: Cp、Cpk正文:DEK印刷机的CPK统计结果之所以能体现出其设备印刷精度,源自于机器相机的CALIBRATION原理,所以在分析其CPK统计原理之前先介绍机器 CAMERA CALIBRATION 的原理,然后结合CALIBRATION 的原理,对机器CPK统计过程进行分析。
一、DEK印刷机CAMERA CALIBRATION原理印刷机使用一个向驱动钢网和板对中的伺服系统发出运动指令的自动视觉对中系统来保证保证钢网和PCB对中的精度和稳定性。
每次印刷前都会进行一次光学自动校正,以此来保证每次印刷的精度。
光学识别系统有一个配有闪光灯的电子相机,能同时照到钢网和PCB的位置识别点,而识别点是专门为钢网和PCB的对中而设计的。
为保证视觉系统的识别对中功能的精度,需要进行一个全面的视觉系统的CALIBRATION,视觉系统的CALIBRATION包括两个阶段,需要使用一个CALIBRATION 钢网和一个CALIBRATION板。
第一阶段,CALIBRATE VISION,即进行X、Y、方向的校准。
X、Y方向的校准是计算钢网矫正运动的距离,以微米为单位。
相机找到校准钢网的识别点后,钢网会在X、Y方向运动一个固定的距离,一般是1mm,然后机器计算钢网识别点运动的距离,评估钢网运动和识别点实际运动之间的偏差。
钢网上的25个识别点都会进行这一动作。
机器会计算每个识别点的运动距离,并将结果平均。
这一结果会被机器记录下来并用作校准数据的一部分。
校准角度方向的运动。
相机选择三个钢网上的识别点,钢网在角度方向运动(使用两个X轴矫正马达运动,X后矫正马达运动+2mm,X前矫正马达运动-2mm,这样就得到了角度方向的运动)。
DEK参数中文解释

NO. PARAMETER 1 PRODUCT NAME 2 PRODUCT ID 3 DWELL HEIGHT 4 DWELL SPEED 參數 程式名稱 附屬註解 刮刀等待印刷高度 刮刀上升速度 說明 8位英文/數字 32位英文或數字 刮刀由原點或鋼板表面移動至等待印刷高度 刮刀印刷完畢上升到等待印刷高度的速度 鋼板轉接器規格設定(可設定255, SANYO, HERAEUS, 20x20, 12x12等轉接器, NONE為不使 用轉接器) DEFAULT DEFAULT Cycle,Speed,Test 30mm 24mm/s MAX/MIN OR OTHER INCREMENT 備註
由鋼板前側內緣至MESH膠邊之距離 由鋼板後側內緣至MESH膠邊之距離 由鋼板左側內緣至MESH膠邊之距離 由鋼板右側內緣至MESH膠邊之距離 X方向鋼板開孔位置(LEFT左, RIGHT右, CENTRE 中心) Y方向鋼板開孔位置(LEFT左, RIGHT右, CENTRE 中心)
38mm 38mm 38mm 38mm CENTRE
1mm/s 1mm/s 0.1mm
0mm 300mm ON 0kg 2bar 0bar 5kg 5kg 1 0mm 1 DISABLED 0mins 0 Boards DISABLED DISABLED 0mm 19mm 0secs 3mm/s 3mm
Max:(Board Width-A)mm Min:-6.5mm Max:500mm Min:150mm ON OFF Max:20kg Min:0kg Max:4bar Min:0.2bar Max:4bar Min:0.2bar Max:20kg Min:0kg Max:20kg Min:0kg Max:1000 Min:1 Max:5mm Min:0mm Max:10 Min:1 ENABLED DISABLED Max:30mins Min:0mins Max:100 Boards Min:0 Boards ENABLED DISABLED DISABLED MODE 1 MODE 2 Max:6mm Min:0mm Max:42mm Min:3mm Max:99secs Min:0secs Max:20mm/s Min:0.1mm/s Max:3mm Min:0mm
SMT行业的印刷机DEK
SMT行业的印刷机DEKSMT行业是现代电子制造业的重要组成部分,SMT技术的各种设备也在其发展过程中得到了不断壮大。
其中最为重要的设备之一就是印刷机DEK。
DEK印刷机的核心是一组高精度、高重复性的印刷头组件,可以在PCB(Printed Circuit Board,印刷电路板)上实现高精度粘贴。
这些印刷头组件可以保证印刷速度和质量,同时具有快速调整印刷参数的优点,因此被广泛应用于各种电子制造中。
DEK印刷机最显著的特点是它的印刷速度快,并且可以实现极高的印刷质量。
这些特点是由于DEK利用无障碍的视觉系统识别每个电路,然后使用其独有的粘贴技术对该区域施加粘合剂的优异性。
同时,印刷机的印刷头组件的材料十分耐用,可确保机器繁重的工作负载。
另一个DEK印刷机的特点是它的自适应性。
该机器可以根据不同的印刷需求来自动调整粘结力的力度,因此可以应对不同的工作要求。
在印刷生产线上,该特点是非常有用的,能够在不同的实验条件下保证印刷质量的一致性和稳定性。
印刷机DEK在SMT行业中的应用也是非常广泛的。
它不仅用于PCB上电路的印刷,还广泛应用于LED、LCD显示屏的印刷等领域。
特别是人们对LED照明质量的要求越来越高,在LED的印刷上使用印刷机DEK是非常常见的。
DEK印刷机也是电子制造商的选择。
这些制造商需要可靠、高效的印刷设备在PCB和其他电子受体上完成大量的印刷。
DEK印刷机不仅具有卓越的印刷质量和速度,而且还非常可靠,具有灵活的选择功能,适用于不同的应用需求。
总之,印刷机DEK是SMT行业中最重要的印刷设备之一。
它的高速度、高精度、自适应性和高可靠性,使其在电子制造业中得到了广泛的应用。
随着电子制造技术的升级,DEK印刷机的功能和性能也将不断升级,为电子制造商们提供更加高效、精确、可靠的印刷方案。
DEK 诊断菜单中文解释
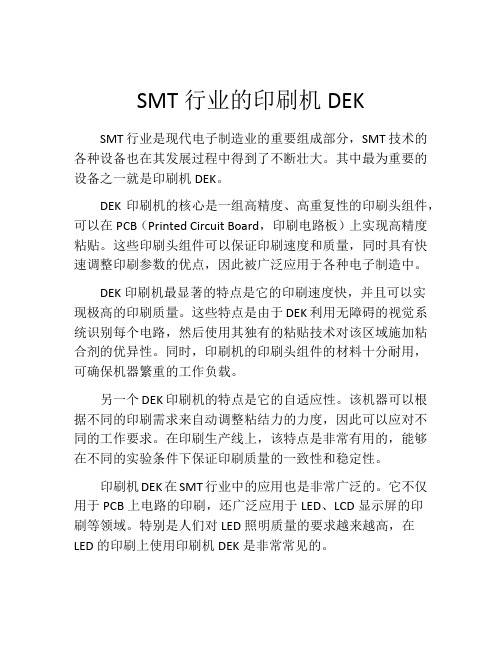
编制:戴龙伟2009年8月15日1:主画面中点击【维护】2:进入如下画面,点击【诊断】3:进入如下画面1):System:系统2):Print Carriage:印刷支架3):Squeegee:刮刀4):Camera Axes:照相机轴(X,Y)5):Rail System:轨道6):Screen Alignment:钢网架7):Screen Change:钢网更换8):Screen Cleaner:钢网清洁9):Rising Table:上升台面10):MIU:(DEK技服使用项)4:System系统光标移至System项,点击上图中的【Select module】进入。
1:2:3:报警灯红灯[ON亮,OFF灭] 4:报警灯黄灯[ON亮,OFF灭] 5:报警灯绿灯[ON亮,OFF灭] 6:7:数据收集8:关掉软件回到Windows印刷支架Carriage:印刷支架5:Print Carriage:1:印刷支架回原点2:将印刷支架移动到最前面3:印刷支架在原点4:将印刷支架移动到最后面5:用点动按钮移动支架6:印刷支架来回移动刮刀6:Squeegee:Squeegee:刮刀1前刮刀回原点2后刮刀回原点3前刮刀移动到印刷等待高度4后刮刀移动到印刷等待高度5后刮刀移动到锡膏搅拌高度6用点动按钮移动前刮刀7用点动按钮移动后刮刀8无此功能(以下类同)9无此功能7:Camera Axes:Axes:照相机轴(照相机轴(照相机轴(XX ,Y )1照相机X 轴回原点2照相机Y 轴回原点3照相机移动到生产产品的第一个MARK 点位置4照相机移动到生产产品的第二个MARK 点位置5照相机移动到生产产品的第三个MARK 点位置6照相机移动到停板位置7返回到出厂值8照相机移动到固定边白色参考点位置9设置白色参考点位置10点动移动照相机X轴11点动移动照相机Y轴12照相机灯光的初始化13看MARK点的灯光【ON/OFF】142D检查的灯光{没有用到}【ON/OFF】15Cycle Camera System照相机X,Y来回移动轨道8:Rail System:System:轨道1轨道移动回原点2轨道移动到生产板子的宽度3给PCB板加一个余量【负的数变窄,正的数变宽】{±3mm范围} 4用两个点动按钮移动轨道5用两个点动按钮控制轨道上的皮带6调皮带速度7夹板动作{点OFF使其开或关} 8停板器伸出、缩进9无此功能10板子放在轨道上来回走,看速度两边是否一致11连续做夹板动作12来回调整轨道9:Screen Alignment:钢网架Alignment:钢网架1钢网架回原点2用点动按钮移动控制钢网架X轴的前马达3用点动按钮移动控制钢网架X轴的后马达4用点动按钮移动控制钢网架Y轴的马达5钢网架锁紧器【ON锁紧,OFF可以活动】6钢网架做来回运动钢网更换Change:钢网更换10:Screen Change:1:压住钢网的压板器【ON压紧,OFF收回】钢网清洁Cleaner:钢网清洁11:Screen Cleaner:1OFF清洗架上升/下降2OFF喷酒精3卷纸4真空[OFF关/ON开]5ON松掉磁铁让清洗架推出去6清洗架上升/下降7无此功能8上升台面Table:上升台面12:Rising Table:1升降台回原点2升起来到传送PCB的高度3升起来到看MARK点的高度4升起来到印刷高度5返回出厂值6设置参考视觉高度7设置参考印刷高度(设置时请一个高度一个高度往上升)8用电动按钮驱动升降台9刹车器{当没电时锁住升降台} 10打开真空的阀门11升降台往复运动13:MIU:13:MIU:((DEK技服使用项)。
DEK基本操作说明
DEK 操作说明一:机器安全标志这章主要介绍DEK机器内部的各个安全标志、ESD防范标志等。
它们都处于机器内部或者外部比较显眼的地方。
1 警告和注意具有黄色的“WARNING,CAUTION,DANGER”字样的标签。
WARNING标志着需要操作人员或者维护人员注意可能发生的危险,这在机器内部或者是机器执行某些功能的时候会发生。
如上图所示的组合警告标签,表示操作人员或者维修人员需要参考技术手册再执行操作。
下面的表格列出DEK印刷机所用警示标识及其相应的含义。
警告:表示可能存在着隐蔽的危险警告:表示靠近锋利的边界会造成人身体伤害警告:表示所接触到的物资会有刺激性的化学伤害。
警告:表示所接触到的物资可能会燃烧警告:表示附近有移动的部件,小心不要碰到警告:表示附近有放射性的物资或者射线警告:表示高压力可能会造成伤害警告:表示附近可能有高电压,有被电击的危险警告:表示附近或者表面有发热的物体,防止烫伤2 紧急处理DEK虽然有如1所示的警告和安全标示,但仍然会有不正当操作的情况出现而出现紧急故障或者伤害,为此,DEK提供了两个安全紧急按钮(E-stop)。
每个紧急按钮都能使机器急停,从而避免伤害。
如图所示,在机器前台的两端都有红色的按钮就是E-stop。
图1 紧急按钮位置二机器概述1如图所示为机器外部概貌①机器控制屏幕(Main Control Screen)②两侧的控制按钮(Two Button Control)③小鼠标(Mouse Trackball)④键盘(Keyboard)⑤系统启动按钮(System Button)⑥红色紧急按钮(Emergency Stop Button,E-stop)⑦主电源开关(Main Isolator)⑧印刷监控灯(Paste Roll Lamp)⑨机器状态灯(Tricoloured Beacon)2 机器控制屏幕的两种显示方式,如图所示Type1①印刷标题栏(Printe Title)②制程参数窗口(Process Parameter)③消息提示栏(Message Prompt)④主菜单(Main Menu)⑤视频窗口(Vision Data)⑥警告消息窗口(Warning Message)⑦印刷状态窗口(Printer Status)Type2①制程参数窗口(Process Parameter)②机器参数窗口(MachineParameter)③消息提示栏(Message Prompt)④主菜单(Main Menu)⑤视频窗口(Vision Data)⑥警告消息窗口(Warning Message)⑦印刷状态窗口(Printer Status)⑧印刷标题栏(Printe Title)这两种方式可以通过Zoom in或者Zoom out来转换。
dek参数名称

光學測試點1的X座標:
最小:0mm最大:508mm
增量:0.1mm
Fiducial 1 Y
光學測試點1的Y座標:
最小:0mm最大:508mm
增量:0.1mm
Fiducial 2 X
光學測試點2的X座標:
最小:0mm最大:508mm
增量:0.1mm
Fiducial 2 Y
光學測試點2的Y座標:
增量:0.004mm
Forward Y Offset
前向Y補償值:
最小:-1.0mm最大:+1.0mm
增量:0.004mm
ForwardθOffset
前向θ補償值:
最小:-1000arc最大:+1000arc
增量:2arc seconds
Reverse X Offset
後向X補償值:
印刷偏移的補正
最小:-1.0mm最大:+1.0mm
增量:1mm/sec
預設值:10mm/sec
Flood Speed
舖錫速度:
將錫膏先舖一層之速度,後再執行一般印刷動作既做二次印刷
最小:2mm/sec最大:150mm/sec
增量:1mm/sec
預設值:10mm/sec
Print Front Limit
前印刷界限:
此界限是以PCB板為準往板中心開使計算
最小:0%最大:100%
增量:1%
預設值:50%
X Align Weighting
X向調整的比重:
此只適用於3個光學測試點
最小:0%最大:100%
增量:1%
預設值:50%
Y Align Weighting
Y向調整的比重:
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
0.01mm 0.01mm 0.01mm 0.01mm 0.01mm 1 degrees
17 FID. CORNER ROUNDING 定位點導圓角尺寸 18 ROTATION 旋轉方位
19 POSITION X
藍色擷取圖形X座標
0mm
Max:-1.95mm Min:1.95mm
0.01mm
20 POSITION Y
Max:Board Width Min:0mm
0.1mm
6
POSITION X
藍色擷取圖形X座標
0mm
Max:-1.95mm Min:1.95mm
0.01mm
7 8 9
POSITION Y DIAMETER INNER CONTOUR
藍色擷取圖形Y座標 直徑 往內搜尋帶狀寬度 往外搜尋帶狀寬度
0mm 2mm 0.2mm 0.2mm
0.01mm 0.01mm 0.01mm 0.01mm 1 degrees
40 POSITION X
藍色擷取圖形X座標
0mm
Max:-1.95mm Min:1.95mm
0.01mm
41 POSITION Y
藍色擷取圖形Y座標
0mm
Max:-3.45mm Min:3.45mm
0.01mm
42 FIDUCIAL WIDTH 43 FIDUCIAL HEIGHT 44 LEG WIDTH 45 INNER CONTOUR 46 OUTER CONTOUR 47 ROTATION
FIDUCIAL MARK
NO. PARAMETER 參數 說明 光學定位點的形狀共有CIRCLE圓形, RECTANGLE矩形, DIAMOND菱形, TRIANGLE三角形, DOUBLE SQUARE雙正方 形, CROSS十字形, VIDEO MODEL影像形式 (任意圖形但必須對比清楚且為唯一形狀,若 Teach不當較容易產生印刷偏移) 背景設定(DARK暗,LIGHT亮,通常對PC板設為 DARK,對鋼板設為LIGHT) 系統判讀可成為定位點之評分門檻值,及格者 才視為定位點之一 從PC板的右邊或左邊開始計算距離(確認設 備為右參考或左參考,數值更動則沿X方向移 動相機,即背景移動,為粗調X座標) 從PC板的下緣板邊開始計算距離(數值更動 則沿Y方向移動相機,即背景移動,為粗調Y座 標) CIRCLE 由電腦藍色擷取圖形至真實光學定位點的X 距離補償值(數值更動則沿X方向移動藍色圖 形,即前景移動,為微調X座標,當LOCATE FIDUCIAL成功後此座標值將自動產生) 由電腦藍色擷取圖形至真實光學定位點的Y 距離補償值(數值更動則沿Y方向移動藍色圖 形,即前景移動,為微調Y座標,當LOCATE FIDUCIAL成功後此座標值將自動產生) 直徑設定 設定以藍色定位點圖形輪廓開始往內帶狀寬 度做搜尋並產生內輪廓 設定以藍色定位點圖形輪廓開始往外帶狀寬 度做搜尋並產生外輪廓 RECTANGLE 由電腦藍色擷取圖形至真實光學定位點的X 距離補償值(數值更動則沿X方向移動藍色圖 形,即前景移動,為微調X座標,當LOCATE FIDUCIAL成功後此座標值將自動產生) 由電腦藍色擷取圖形至真實光學定位點的Y 距離補償值(數值更動則沿Y方向移動藍色圖 形,即前景移動,為微調Y座標,當LOCATE FIDUCIAL成功後此座標值將自動產生) 定位點寬度設定 定位點高度設定 設定以藍色定位點圖形輪廓開始往內帶狀寬 度做搜尋並產生內輪廓 設定以藍色定位點圖形輪廓開始往外帶狀寬 度做搜尋並產生外輪廓 定位點導圓角尺寸設定 旋轉角度設定(順時針旋轉) DIAMOND 由電腦藍色擷取圖形至真實光學定位點的X 距離補償值(數值更動則沿X方向移動藍色圖 形,即前景移動,為微調X座標,當LOCATE FIDUCIAL成功後此座標值將自動產生) 由電腦藍色擷取圖形至真實光學定位點的Y 距離補償值(數值更動則沿Y方向移動藍色圖 形,即前景移動,為微調Y座標,當LOCATE FIDUCIAL成功後此座標值將自動產生) 定位點寬度設定 定位點高度設定 設定以藍色定位點圖形輪廓開始往內帶狀寬 度做搜尋並產生內輪廓 設定以藍色定位點圖形輪廓開始往外帶狀寬 度做搜尋並產生外輪廓 旋轉角度設定(順時針旋轉) TRIANGLE DEFAULT MAX/MIN OR OTHER CIRCLE RECTANGLE DIAMOND TRIANGLE DOUBLE SQUARE CROSS VIDEO MODEL DARK LIGHT Max:1000 Min:10 10 INCREMENT 備註
1
FIDUCIAL TYPE
光學定位點型式
CIRCLE
2
BACKGROUND
光學定位點背景
DARK
3
ACCEPT SCORE
定位點允收分數
700
4
FIDUCIAL X
光學定位點X座標
242.5mm
Max:Board Length Min:0mm
0.1mm
5
FIDUCIAL Y
光學定位點Y座標
241.0mm
定位點寬度 定位點高度 腳寬 往內搜尋帶狀寬度 往外搜尋帶狀寬度 旋轉方位
1.5mm 1.5mm 0.5mm 0.25mm 0.4mm 0 degrees
Max:3mm Min:0.5mm Max:3mm Min:0.5mm Max:1.1mm Min:0.1mm Max:0.25mm Min:0.2mm Max:1.0mm Min:0.2mm Max:180 degrees Min:0 degrees
0mm
Max:-1.95mm Min:1.95mm
0.01mm
27 POSITION Y
藍色擷取圖形Y座標
0mm
Max:-3.45mm Min:3.45mm
0.01mm
28 FIDUCIAL WIDTH 29 FIDUCIAL HEIGHT 30 INNER CONTOUR 31 OUTER CONTOUR 32 ROTATION
0.01mm 0.01mm 0.01mm 0.01mm 0.01mm 1 degrees
48 POSITION X
藍色擷取圖形X座標
0mm
Max:-1.95mm Min:1.95mm
0.01mm
49 POSITION Y
藍色擷取圖形Y座標
0mm
Max:-3.45mm Min:3.45mm
0.01mm
定位點寬度 定位點高度 往內搜尋帶狀寬度 往外搜尋帶狀寬度 旋轉方位
1.5mm 1.5mm 0.4mm 0.4mm 0 degrees
Max:3mm Min:0.5mm Max:3mm Min:0.5mm Max:0.46mm Min:0.2mm Max:0.62mm Min:0.2mm Max:360 degrees Min:0 degrees
26 POSITION X
藍色擷取圖形X座標
由電腦藍色擷取圖形至真實光學定位點的X 距離補償值(數值更動則沿X方向移動藍色圖 形,即前景移動,為微調X座標,當LOCATE FIDUCIAL成功後此座標值將自動產生) 由電腦藍色擷取圖形至真實光學定位點的Y 距離補償值(數值更動則沿Y方向移動藍色圖 形,即前景移動,為微調Y座標,當LOCATE FIDUCIAL成功後此座標值將自動產生) 定位點寬度設定 定位點高度設定 設定以藍色定位點圖形輪廓開始往內帶狀寬 度做搜尋並產生內輪廓 設定以藍色定位點圖形輪廓開始往外帶狀寬 度做搜尋並產生外輪廓 旋轉角度設定(順時針旋轉) DOUBLE SQR. 由電腦藍色擷取圖形至真實光學定位點的X 距離補償值(數值更動則沿X方向移動藍色圖 形,即前景移動,為微調X座標,當LOCATE FIDUCIAL成功後此座標值將自動產生) 由電腦藍色擷取圖形至真實光學定位點的Y 距離補償值(數值更動則沿Y方向移動藍色圖 形,即前景移動,為微調Y座標,當LOCATE FIDUCIAL成功後此座標值將自動產生) 定位點寬度設定 定位點高度設定 設定以藍色定位點圖形輪廓開始往內帶狀寬 度做搜尋並產生內輪廓 設定以藍色定位點圖形輪廓開始往外帶狀寬 度做搜尋並產生外輪廓 旋轉角度設定(順時針旋轉) CROSS 由電腦藍色擷取圖形至真實光學定位點的X 距離補償值(數值更動則沿X方向移動藍色圖 形,即前景移動,為微調X座標,當LOCATE FIDUCIAL成功後此座標值將自動產生) 由電腦藍色擷取圖形至真實光學定位點的Y 距離補償值(數值更動則沿Y方向移動藍色圖 形,即前景移動,為微調Y座標,當LOCATE FIDUCIAL成功後此座標值將自動產生) 定位點寬度設定 定位點高度設定 十字圖形四內凹點所形成的正方形邊長即為 腳寬 設定以藍色定位點圖形輪廓開始往內帶狀寬 度做搜尋並產生內輪廓 設定以藍色定位點圖形輪廓開始往外帶狀寬 度做搜尋並產生外輪廓 旋轉角度設定(順時針旋轉) VIDEO MODEL 由電腦藍色擷取圖形至真實光學定位點的X 距離補償值(數值更動則沿X方向移動藍色圖 形,即前景移動,為微調X座標,當LOCATE FIDUCIAL成功後此座標值將自動產生) 由電腦藍色擷取圖形至真實光學定位點的Y 距離補償值(數值更動則沿Y方向移動藍色圖 形,即前景移動,為微調Y座標,當LOCATE FIDUCIAL成功後此座標值將自動產生) 定位點寬度設定 定位點高度設定
50 FIDUCIAL WIDTH 51 FIDUCIAL HEIGHT
定位點寬度 定位點高度 往內搜尋帶狀寬度 往外搜尋帶狀寬度 旋轉方位
1.5mm 1.5mm 0.4mm 0.4mm 0 degrees
Max:3mm Min:0.5mm Max:3mm Min:0.5mm Max:0.75mm Min:0.2mm Max:1.0mm Min:0.2mm Max:180 degrees Min:0 degrees
0.01mm 0.01mm 0.01mm 0.01mm 1 degrees