DEH转速突变及改进
DEH系统的功能试验

,DEH系统的功能试验一、DEH系统的主要功能及试验(一)转速控制转速控制是DEH最基本的功能,通过手动或自动地改变设定值。
可以实现对汽轮机组的转速控制。
如起动、升速,或维持在某一固定转速。
DEH系统的转速控制精度优于液秒调系统,一般都能达到0.1%。
DEH控制系统的转速控制主要有以下三种方式,通常在动态试验中进行功能试验和转速控制精度的检查。
1.启动过程的转速控制汽机手动启动时,由运行人员根据汽机启动状态选择转速设定值和升速率,DEH控制系统根据转速设定值和升速率调节调门开度。
转速设定一般有阀门关闭(即汽机零转速)、400r/min、800r/min、3000r/min四挡。
升速率通常保持、慢、中、快四挡,分别为0r/min2 、100r/min2 、150r/min2、300r/min2 。
在升速过程中,当转速到800r/min和3000r/min时要分别进行两次暖机,升速需要选择转速保持(0r/min2),暖机时间由运行人员根据机组的热力状态确定。
汽机自启动时,转速设定值和升速率由顺序控制程序自动选择。
2.调速器控制调速器控制是汽机并网带负荷后的转速控制,也就参与电网的一次调频。
当汽机转速上升到3000r/min,并网后才可以投入一次调频回路。
关于机组参与电网一次调频,将在本章第三节几行讨论。
3.自动同期控制自动同期控制也称为并网频率匹配、线速度匹配(LSM)控制。
在发电机并网前,自动同期控制回路通过对电网频率与发电机组频率(机组转速)的偏差进行比较,自动校正转速设定值,使发电机输出端频率始终跟随电网频率变化。
在线速度匹配(LSM)控制方式下,通常保持机组频率高于电网频率0.02-0.1Hz直至并网完成自动同期控制功能可由运行人员投切,汽机自启动时自动投入.(二)负荷控制DEH的负荷控制主要有三种模式:CCS控制模式、DEH负荷自动调节模式和手动控制模式。
在CCS控制模式,DEH作为CCS的执行部分,接受CCS系统给出的负荷增减指令来调节阀门开度。
汽轮机DEH调节系统调速油压波动的原因分析和处理

汽轮机DEH调节系统调速油压波动的原因分析和处理电厂在实际运行的过程中,需要得到汽轮机机组控制系统的支撑,其中在一次对机组进行DEH改造过后,发电机组运行过程中经常会出现调速油系统油压不稳定,而且波动现象较为频繁。
因此,为了能够确保机组正常运行,则需要事先分析产生波动的主要原因,并制定针对性解决方案,跟踪调查掌握设备存在的不足,确保能够对设备进行实时改进,从而解决调速系统油压产生波动的问题,实现机组的稳定运行。
本文主要分析油压波动产生的原因,并阐述了相关解决对策,仅供参考。
标签:油压波动;汽轮机;调节系统;处理引言:某电厂在进行一次A机检修的过程中,对该厂汽轮机调速系统进行的DEH改造。
改造完成之后发现机组在正常运转的过程中会经常出现油压波动的现象,从而导致机组无法正常运行。
因此,为了有效解决这一问题,则需要注重调研工作的开展,分析注油器、油泵、叶轮上是否存在损坏现象,掌握油压波动现象的主要原因,从而制定针对性解决方案。
1.汽轮机TH的改造方案分析在实际对汽轮机控制系统进行DEH改造的过程中,需要依靠外添加两个复位,电磁阀得支撑,而且在危急的情况下能够切断油门使其转为可靠的运行状态,从而达到远程挂闸控制的目的。
其中AST系统主要由紧急切断油门,以及电磁阀所组成,改造后,可实现机头手动停机、远程遥控脱扣。
OPC超速限制模块,主要是由快关放大滑阀以及快关电磁阀所组成,当电磁阀运作或安全油压降低,都能够实现运作的完成,而且能够使得全部调节阀保持闭合的状态。
所以,针对此环节操作来讲,能够有效发挥控制集成块的效果。
为了确保电磁阀能够正常运行,可以开启油放大滑阀并将其连接中压联合气门以及主汽门,使得油路保持闭合的状态。
再加上不同电液油动机之间不会产生影响,通过DEH控制器来实现计算所有油动机阀所发出的信号,而且有DEH控制器能够通过阀油路块达到二次油压,并流至液压转换器,由此可以完成油动机运作全部指令。
所以说,改造工作有利于实现DEH纯电调控制,并实现更加高效的运转。
浅谈电厂汽轮机数字电液调节系统(DEH)的调试

【 关 键词 l D E H ; 汽轮机 ; 转速控制 由负荷 变化率 设定 器把其 余 负荷转
变为 设定负荷后 , 再 将其值和 实际负荷 比较 , 这一 比较 值经 过P I 调节器 1 . D E H 系统 的 性 能 和机 组频率修正 后, 作为控制的参 考负荷。 此后过程 与初始 负荷 的控制 D E H系统 有如 下性 能 : 转子 应 力计算 、 转 速控 制 、 阀试 验 功能 、 频 率 一负荷 控制 、 阀门管 理、 Vu 和I P R功能 、 切换 阀门 、 超 速保 护及试 过程 相同 。 所 以, 对 不同负荷的 调试 方式可 归结如下 : 负荷 变化 率设定 验。 器参 数 ; 设 定曲线 ; P I 调 节器参 数l p P =0 . 2 5 、 t =4 s ; 上、 下限 延时时 间 及幅值 。 2 , D E H 系统 的 调试 运 行 在调 试DE H系统 时, 初 步检 验要采 用负荷 阶跃 扰动 试 验形 式 , 并 2 . 1 转速 调试 分 别在5 O %i l l 5 0 ±1 0 M W、 7 5 %1 1 1 5 2 5 ± 2 0 通过对 比例 的作用 可实现 对转速 的控制 , 而为了消除在 比例调 节时 修 改和完 善扰动 试验 的结果 。
产生静差 , 系统要在逻 辑上增设一模 块来实现 积分功能 , 即升速率 与一 个 常数0 . 0 0 0 8 3 3 mi n / s a mp l e 相 乘求出每标 准采样 时间的升 速率。 所以 即便在最高升 速率 3 0 0 r / mi n 的情 况下, 单个 采样时 间的升速率 也仅是 3 0 O r / mi n × 0 . O 0 0 8 3 3 mi n / s a mp l e = 0 . 2 4 9 9 r / ( mi n ・ s a mp l e ) 。 因此在对 最后的 控制结 果进行观 察后发现 , 即使未在一 般控制 系统中的P I 模块 , 但在实际情况中也同样发挥 了比例积分 的作用, 转速 的整个控制效 果是 比较稳 定的。 当汽 轮 机 的 升 速 控 制 为 主 汽 门M S V系 统 时 , 在 汽 机 的转 速 为
DEH的转速、负荷控制原理小结
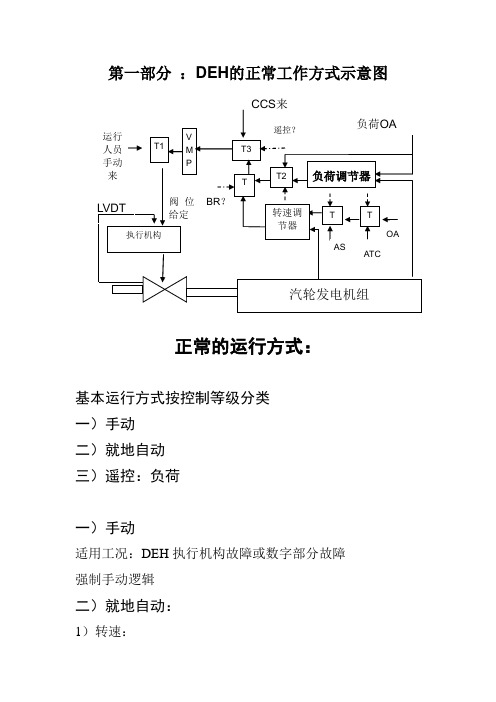
第一部分:DEH的正常工作方式示意图正常的运行方式:基本运行方式按控制等级分类一)手动二)就地自动三)遥控:负荷一)手动适用工况:DEH执行机构故障或数字部分故障强制手动逻辑二)就地自动:1)转速:OA:盘车至3000转/分ATC:盘车至3000转/分AS:3000转/分至并网;投AS许可逻辑,AS强制切除逻辑2)负荷:①OA:开环:负荷回路的预备模式。
刚并网,刚投遥控或故障需切除闭环时。
控制逻辑:强制切除闭环:正常调节模式。
控制逻辑:投币换汇率许可目标值、变化率②OA-ATC目标值:OA变换率:取小(OA,ATC)三)遥控:负荷1)CCS:目标值、变换率:机主控制器提供控制逻辑:投协调许可;强制切除2)CCS-ATC目标值、变换率:机主控制器提供ATC提供参考变化率,超限时发出HOLD信号。
第二部分:DEH的故障工作方式示意图图2.6 DEH的转速、负荷控制原理小结故障时的基本工作方式一)手动二)就地自动三)遥控:负荷一)手动1)手动RB①投入许可逻辑:(负荷手动方式)& (实际负荷低于辅机允许负荷)②手动RB action 逻辑:(手动RB 已投入)& (实际负荷高于于辅机允许负荷) & (辅机跳闸)& (跳闸后时间小于规定值)③动作过程:辅机跳闸;RB触发;手动 RB action逻辑置1;负荷手动目标值切换;RB提供负荷目标值;规定速率减负荷;负荷减至规定值;规定时间完成;切换回手动方式。
2)(手动) F TPC:手操盘TPL IN ;TPL OUTFTPC action 逻辑:压力不可调,额定压力①投入许可逻辑:(负荷手动方式)& (实际压力高于额定压力90%)& 主汽压力测点正常②F TPC action 逻辑:(F TPC已投入)& (主蒸汽压力下降至低于设定值90%) &(调节阀开度大于全行程的20%)③动作过程:汽压下降;触发;F TPC action逻辑置1;切换手动负荷目标值;规定速率减负荷;汽压恢复;切换回手动方式。
发电机并网过程中转速突变的原因分析及预防措施

发电机并网过程中转速突变的原因分析及预防措施作者:刘波史松马贤宁来源:《中国新技术新产品》2013年第04期摘要:介绍SID-2CM型微机同期装置调节的发电机并网过程中转速突变的现象,分析了形成的原因,并提出了预防措施。
关键词:并网;转速突变;原因分析;预防中图分类号:TM30 文献标识码:A概述:发电机并网过程中,如汽轮机转速发生突变现象,使DEH装置目标控制值超出同期装置允许差频整定值,将导致发电机长时间不能并网;如微机同期装置合闸脉冲已发出,此后若汽轮机转速发生突变现象,则在发电机并网过程中有可能发生非同期并列现象,给机组和系统的安全运行构成严重威胁。
1发电机并网过程中转速突变的现象某公司两台135MW发电机和四台300MW发电机均采用SID-2CM型微机同期装置,调速系统均为上汽厂配供、与DCS同步设计的DEH电液调节系统,135MW发电机在并网过程中汽轮机转速比较平稳,未发生转速突然上升的现象;300MW发电机在并网过程中汽轮机转速有时会发生突然上升的现象,上升值最高达3018r/min,后逐步稳定在3010 r/min,检查DEH 目标控制值为3010 r/min,导致发电机转速因超出允许频差整定范围(≦0.15Hz)不能并网,需退出自动准同期方式进行调速,然后再投入自动准同期方式进行调速,有时需反复多次,当DEH目标控制值≦3009 r/min时,同期装置才允许发电机并网运行。
2原因分析根据上述现象分析,造成发电机并网过程中汽轮机转速突变的可能原因为:2.1运行人员用SID-2CM型微机同期装置并网前该装置处于“同频”状态,当运行人员复归该装置打破“同频”时,DEH装置目标控制值设定为3005r/min,微机同期装置短时间内发出数个调频增脉冲至DEH装置进行调速,使汽轮机转速迅速上升至3005 r/min,由于汽轮机是一个大的轴系系统,惯性使汽轮机转速继续上升,DEH装置根据目标控制值发出调频减脉冲,此时如DEH装置未收到或未全部收到微机同期装置发出的调频减脉冲,将使DEH装置目标控制值上升,可能上升为3010 r/min。
DEH系统一次调频问题探讨

DEH系统一次调频问题探讨本文简要介绍了一次调频的概念和汽轮机调节系统几个参数对一次调频的影响。
并以安阳发电厂为例,介绍了DEH系统频率调节原理,并对调节中的几个问题进行了探讨。
一、概述随着电网容量的逐步增大,汽轮发电机组的一次调频在保证电网的安全经济运行、提高电能质量和电网频率的控制水平、迅速消除由于电网负荷变化引起的频率波动等方面显得越来越重要。
如何根据不同机组的静态特性和实际运行情况正确设置一次调频的参数,以达到既能满足快速响应电网频率的变化,又能满足机组安全稳定性的要求成为汽轮发电机组的一个重要课题。
以下便针对这个问题进行分析和探讨。
二、一次调频的概念一次调频功能是通过调节汽轮机调门的开度,利用机组的蓄热来快速响应电网频率的变化。
目前大机组普遍应用DEH来进行汽轮机转速和有功功率的控制。
DEH中一次调频功能是将汽轮机转速与额定转速的差值直接换算成有功功率指令,以新华控制工程公司的DEH为例,其控制结构原理见图1。
额定凭速实际铤速汽机闻门指令其中汽轮机额定转速(一般为3000 r/min)与实际转速的差值经函数f (x)图1 DEH一次内频控制维构原理田转换后生成一次调频因子,直接叠加到DEH的有功功率给定值上,以控制汽轮机的调门开度。
一次调频因子的设置包括频差死区和转速不等率两个因素。
频差死区的设置是为了防止在电网频差小范围变化时汽机调门不必要的动作。
三、汽轮机调节系统几个参数对一次调频的影响3.1速度不等率设汽轮机在空载时的转速为Mx,额定功率时的转速为%in,汽轮机额定转速为no ,将瓜纨与n丽的差值与no之比来表征汽轮机转速与功率的对应关系称为速度不等率8 ,也称为速度变动率,不均匀度等:一次调频不等率8定义为:8 = A n/n0式中An——机组空负荷时和满负荷时的转速差值,r/min;n0——机组额定负荷值,MW O5的数值一般设置在3%〜6%, 8值越小,在相同的频差下汽机调门的变化幅值越大,反之则越小。
发电厂DEH控制系统频繁故障的原因分析及改进措施

障的各项原 因提 出了改进措施 。 பைடு நூலகம்
I 关键词】 H; 原因分析; DE 故障; 改进措施
图中左侧 回路为超速保护跳 闸控制硬 回路 , 原设计为 T 82 ) B (3 , 与 某 电力公司装机容量为 3 3 0 x 0 MW.汽轮机为东方汽轮机厂生产 T 856或 T 923串联后再和 T 956形成多重控制功能 。T 956 B (。) B (, ) B (,) B (,1 的: 0 — 67 75 7 8型 亚临界中间再热双缸双排 汽凝 汽式汽轮 单 接点动作直接跳机 . 可靠性差时极易造成误动。 N30 1. ̄3 /3 — 其 1 跨控制器数据传输过程 中出现的信号异常 _ 3 机 .E D H控制系统采用 A B贝利公司的 Sm hn 控制 系统 .投产至 B y po y D S系统控制逻辑在组态后是 以 … ’ O C 1 、 ”的变化进行逻辑判断 “ 今发生多次 因 D H系统故 障跳机事件 . E 严重影响了机组 的安全运行
21 年第2 期 02 6
科技 _向导
◇ 科技论坛◇
发电厂D H控制系统频繁故障的原因分析及改进措施 E
刘晓甫 王 鹏 ( 河南博奥建设股份有 限公司 河南 巩义
【 摘
4 10 ) 5 0 2
要】 本文对 某厂 D H 系统应 用中频繁故 障( E 导致机组 甩负荷 、 门全 关等异常) 调 的原 因进行 了较 为全面深入的分析 , 并对照 引起故
O前 言 .
的. 当两个控制器间进行数据交换时 . 如果数据传输异常 , 在一个控制 器 内运算为… ’ 1的信号传输 到另一个控制器后失真为… ’ 0, 就会造成逻 辑判断错误而误动 该 机组在查找跳 闸原 因的过程 中发现其 D H系 E 统控制逻辑 中运行( U ) R N 信号就存在跨控制器传输 . 分析机组跳闸报 警 记录及历史数据记 录发 现记录情况与 “ U ” R N 信号消失后机 组实际 响应情况相似 该机组 D H控制逻辑设计 为 R N 信 号在机组正常 E U ” 运 行情况下消失后会导致机组 目标负荷值切换为 “ ” 引发所 有凋门 O. 间接造成汽包水位超 限保护动作 . 锅炉 M T连跳汽机。通过仔 F 制 的 3 .由汽轮机保 护模件 T S2 套 P0 卡进行 处理后作为 D H系统转 关 闭. E 细的查看 和比对 . 机组 D H系统跨控制器传输信号很多 . 中模拟量 E 其 速. 其转速信号采 样周期为 4 s 当汽机转速连续 超过超速 限制 O C m. P 信号达 8 个 . 1 开关量信号达 23 . 1 个 这么多的控制信号通过跨控制器 限值 达三个取样 时段( 1m ) 共 2 s 时超速限制保 护输 出: 当汽机转速 连 一旦传输异常机 组误跳 的几率极高。 另经测量 D H系 E 续超过低压遮 断、 高压遮 断限值达两个采样 周期( 8 s时遮 断保 护 方式进行传输 . 共 m) 统机柜控制总线电压较低 , 最低达 2 V 正 常应 为 4 V以上 , . . 8 . 2 由此也 动作 。 汽轮机保护模件在如此短的时间间隔内难 以精确判断出可靠 的 说明 D H系统通讯负荷率较高 , E 易造成数据传输的异常 。 保 护动作信号 .同时从 系统转速记录 曲线 中发 现有转速随机 突变 情 1 控制器升级导致的软硬件不 匹配 . 4
台山电厂DEH系统转速逻辑问题的分析及处理

象( 问题与时序无关) 因此该阀值设 5 处理过程 中遇到 的问题 此 ,
4 问题 处 理
通 过 对原 逻 辑 中存 在 问题 的具 体 分 析 , 决定 采 取 如下 方法 进行 处理 :
后将其相应的地址进行修改 , 最后对硬件、 网络、 逻 辑( S 1 、M 5 A F 48 ) A 47 F 4 8 、 M 5 B 进行全部编译、 下装 ; 下装后发现 D H系统右侧卡件 的 E M 4 ( M 5 E X 48 F 48 处理 器 的 通讯 卡 ) 卡件 的 C F黄 色 通讯 故 障 报警 灯
图 I 3 4 5号 机 组 D H 网 络结 构 、, E
3 45号汽轮机 O C信号 ( 、、 P 超速 13 0 %保 护控
制 oesedpoetncnrl简 称 O C 由 D H 系 vrpe rt i ot , co o P) E
统经逻辑判 断后发 出; P O T信号 ( 超速 10 1%保护 跳机 oe pe rt t ntp 简称 O ) vr edpoe i r , s co i T P 有两 路 , 一 路由 D H系统经逻 辑判 断后送 至 E S发 出, E T 另一
关键词 :E O C O T D H P P
文章编号 :0 8— 8 X( 1 ) 10 0 3 2 15—06 0 中图分 类号 :K 6 文 献标识码 : 0 0 3— 3 T2 B
台 山电厂 汽轮机 由上 海汽 轮机有 限公 司 与美 国
信号和阀门信号等重要信号 ; 另一类为常规 E 20 T0
也相同, 因此 确定 台 山 电 厂 34 5号 机组 转 速 逻 辑 、、 也 同样存 在此 问题 。
m 20/ 件 ' I 0 O卡
DEH逻辑缺陷导致的异常停机分析及逻辑优化
Key words: DEH logical flaws; abnormal shutdown; logical optimization
验 ( 汽轮机主汽门、 调节门补汽阀等活动性试验) 过程中, 因 ATT 试验逻辑存在缺陷, 导致所有调节门 12% 指令信
号发出, 机组异常停机; 机组投入 AGC 模式, 跟踪 AGC 指令时, 由于逻辑缺陷导致触发调节门快关条件 C20 ( 阀门
反馈换算的流量指令与实际流量指令偏差大于 40%) , 机组异常停机。 针对这 2 个问题进行 DEH 逻辑优化, 提高了机
1 min后, 汽轮机所有调节门突然关至 12%, 机组
节门阀位高限切换条件都引用 1 个 ATT 顺控 56 步
态) , 当该步序持续 2 s 不复位时, 会将所有调节
门置 12%高限; 检查 ATT 顺控 56 步序持续 2 s 发
出的条件, 56 步序复位条件为每个调节门高限大
于 101 5%, 正 常 设 置 为 105%。 在 本 次 试 验 前,
能及时触发。 因此及时更新 DEH 软件系统补丁和定
新组态触发负荷跟踪信号的 “与” 逻辑块。
b
补汽阀存在流量指令 80% ~ 100% 空行程,
因补汽阀现阶段没有投入使用, 未能参与调节。 因
此将补汽阀逻辑切除, 高压调节门流量重新分配,
解决了空行程问题。
c
在限压切初压过程中, 负荷跟踪实际负荷
DEH常见问题及处理

DEH及EH系统常见故障的原因分析及解决方法顾正皓汽轮机DEH 纯电调控制系统在长期运行过程中出现故障时,如何及时、正确地进展处理,对于整台机组的平安可靠运行是非常重要的。
作为检修、维护工程技术人员,在处理这些问题前,必须首先判断设备的故障点,了解设备出现故障的具体部件、严重程度及处理过程中必须遵循的方法,同时必须充分认识到故障的复杂性以及如果违反检修规程和技术要求可能产生的严重后果。
只有这样,才能准确、快速地做好设备故障的处理工作。
下面的容主要来自于公开发表的文献,经整理而得,供从事DEH运行及维护的技术人员参考。
一.调节系统摆动1.1 现象现象1:DEH控制系统在运行中,发现汽轮机转速很难控制在3 000 r/min,大概有±25 r/min的转速波动,造成并网困难。
现象2:主汽阀和调节汽阀开度不稳定,调节汽阀开度波动大且摆动频繁。
如某台135 MW机组带100 MW运行,出现高压调节汽阀波动频繁、主汽压力波动大.运行人员将协调控制方式改为DEH控制方式.投人功率反响回路。
约10 s后高调门出现较大围的波动,功率出现振荡、摆动现象,运行人员立即退出功率反响回路。
负荷在约30 s降到60 MW,导致主汽压力急剧上升。
锅炉平安阀动作。
1.2 原因分析产生调节系统摆动的原因很多。
但比拟典型的几个原因如下。
(1)热工信号问题。
当二支位移传感器发生干扰或DEH各控制柜及端子柜屏蔽接地线不好,电源地CG和信号地SG没有分开,造成VCC卡输出信号含有交流分量。
当伺服阀信号电缆有某点接地时均会发生油动机摆动现象。
(2)伺服阀故障。
伺服阀即电液转换器,作用是将DEH控制系统输出的电信号转换成液压信号,控制油动机行程,从而到达控制调门开度的目的。
而一旦某个伺服阀故障(通常是因为油质欠佳造成伺服阀机械局部卡涩),其对应的调门将不能正常响应DEH控制系统的输出指令,从而引起调速系统工作不正常。
伺服阀故障现象比拟常见,轻那么引起调节系统摆动,重那么造成停机或机组不能正常启动。
火电厂热工方面事故案例分析
9、组态不规范出现的时序问题
某厂在刚开始做并网试验时,汽机的六个调门突然开到最 大(100%的开度),致使转速过高而OPC动作。后经分析,查 看组态,发现电气断路器已经合闸信号来自另外一个主模件 (BRC300),在试验过程中,实际断路器已经合闸,但是其合 闸信号来的迟点,导致负荷目标值未切换过来,负荷目标值仍然 以原转速(3000转/分钟)作为目标值,如下示意图:
8、更换HSS03模件负荷突升问题 更换HSS03模件负荷突升问题 HSS03
某电厂2007年8月7号凌晨1点左右,热控人员接到运行人员 通知,#1机左侧中压调门反馈突然变紫,指示值为60%,值班 人员经过初步检查确认为HSS03(液压伺服子模件)模件出问题, 将新模件设置好后直接替代原模件。此时造成负荷从295MW冲 到325MW,并造成一系列的联锁反应。后经过分析,因为左侧 中压调门原来的指令一直为100%,在模件出现问题后,左侧中 压调门已经关闭,在更换完好的模件后,该调门突然打开,造成 负荷突增。如果当时热控人员在更换模件前将指令强制到0,然 后再执行下一操作,就可避免。
某厂整套启动期间中压调门突关降负荷异常分析 2、某厂整套启动期间中压调门突关降负荷异常分析 整改措施:(1)修改再热压力修正中调指令逻辑。因为高 低旁容易关反馈消失引起误动,可将逻辑修改为低旁与高旁全关 信号 或 负荷大于某一定值时,再热压力才修正中压调门。(2) 当伺服阀故障时,可不把调门指令置0,应维持故障前的指令, 实现坏点传递功能。
转 速 指 令 ( 3000 ) 初始负荷
T
目标负荷
断路器已合闸
9、组态不规范出现的时序问题
处理方法:将断路器已经合闸信号组态到同一个模件,再做 试验后,一切正常。
10、 10、电源系统隔离出现的问题
DEH主控制器故障跳机分析

DEH主控制器故障跳机分析8月19日上午10:14:33,#1机组负荷475MW,A/B/C/D/E磨煤机运行,主机DEH主控器B故障,同时转速故障信号触发,造成主机高中压调门,高压主汽门快速关闭,机组甩负荷。
后机组各类参数调整困难,于10:20:26锅炉MFT。
现故障主机DEH主控器B已经下电,机组于下午13:33重新并网。
电子室DEH跳闸首出盘报警:“SPEED SIG FAILURE”,EHC故障监视盘报警:“SPEED SIG(A)(MCTR B)”、“SPEED SIG(B)(MCTR B)”、“MCTR (B)”、“MSV-R VALVE CTR”、“MW SIG”、“CCS LOAD DEMAND CTR”。
记录后以上复归报警。
DEH主控制器B 的监视卡(DMA1卡)上面报警灯“WDT”(看门狗)、“PARITY”(奇偶校验)亮着,记录后复归报警。
一、事件经过:8月19日上午10:14:29秒开始,CRT出现以下报警:10:14:29 1T-ANN-139(ACS) 汽机EHC轻故障报警;10:14:30 EHC-14(DAS-12) 汽机EHC故障报警;以上两个报警都来自汽机轻故障信号同一信号的两个输出。
10:14:33 TBAL-22 EHC重故障跳闸报警,4个高压调门开始快速关闭,汽机第一级压力开始下跌,主蒸汽压力开始上升。
10:14:34 4个高压调门全关,2个高压主汽门,2个中压主汽门开始关闭,机组负荷由472.6MW快速甩负荷至35MW;10:14:35 2个高压主汽门全关,2个中压主汽门全关,(左侧中压主汽门关位置开关故障,在历史记录中未显示。
CV3全关限位开关未动作,机务位置上有偏差。
)负荷为0MW,从历史曲线看,4个高压调门开始慢慢开启;10:14:36 右侧高压主汽门全关信号消失,左侧高压主汽门未开启,2个中压主气门未开启;10:14:37 汽机高压缸第一级级后压力为 3.23MPa,主蒸汽快速升至17.29MPa,高旁快开;10:14: 41 高旁快开、快关一次,(快开原因为主汽压力升速率大,快关原因为EHC油压波动,瞬间油压低于7.5MPa,快关高旁。
DEH系统介绍与常见故障分析

DEH系统介绍及常见故障分析处理摘要:从汽轮机数字电液调节系统组成及各主要部件在系统中的应用出发,分析了各部件的安全问题,并提出解决办法。
.关键词:数字电液调节伺服阀LVDT 伺服卡汽轮机数字式电液控制系统DEH是电站汽轮发电机组不可或缺的组成部分,是汽轮机启动,停止、正常运行和事故工况下的调节控制器。
DEH系统与EH油系统组成的电液控制系统,通过控制汽轮机主汽门和调门的开度,实现对汽轮机的转速、负荷、压力等的控制。
目前电厂的汽机电液调节系统出现过较多的故障,本文就此展开分析。
1 汽轮机电液调节系统的构成汽轮机数字电液调节系统(DEH系统)主要包括EH供油系统、电液伺服执行机构和保安系统。
液压伺服系统是DEH控制系统的重要组成部分,它主要由油动机、伺服阀、LVDT组件、伺服卡等构成。
如图1所示:高压动力油通过隔离阀和滤网后进入电液伺服阀,当高压油进入该阀内装有换向滑阀的腔室内时,滑阀移动打开油口,使高压的动力油进入油动机活塞的下腔室,在该油压升高并克服拉弹簧的关闭力后,油动机向上运动,阀门开启;当该油压降低时,油动机活塞下的油压降低,由于弹簧力的作用,使油动机活塞下移而关闭阀门。
当油动机活塞移动时,同时带动线性位移传感器(LVDT),将油动机活塞的机械位移转换成电器信号,该信号与计算机来的信号相加,因该信号是负反馈信号,所以实际上是相减。
只有在计算机输入的信号相加以后,使电液伺服阀输入的信号为零时,伺服阀方回到中间位置,从而使高压油不再进入油动机的下腔或使压力油不再自油动机下腔泄出,于是阀门门便停止运动,在新的位置上达到平衡。
在油动机控制系统中有一快速卸荷阀,此阀是由危急遮断总管油压控制的,起快速关闭的作用,此种关闭与电气无关。
当快速卸载阀动作时,急遮断油失压而被下部高压油顶起,与油动机进油失压时,被压在底部的环形滑阀因上部遮断油失压而被下部高压油顶起,与油动机进油连通的油管内的油由快速卸载阀迅速排出,促使高压油失压,油动机在弹簧的作用下迅速关闭。
影响一次调频调节原因分析及处理
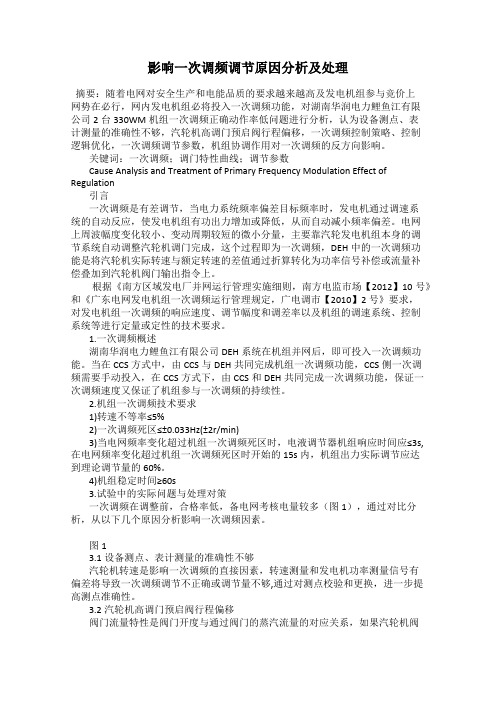
影响一次调频调节原因分析及处理摘要:随着电网对安全生产和电能品质的要求越来越高及发电机组参与竞价上网势在必行,网内发电机组必将投入一次调频功能,对湖南华润电力鲤鱼江有限公司2台330WM机组一次调频正确动作率低问题进行分析,认为设备测点、表计测量的准确性不够,汽轮机高调门预启阀行程偏移,一次调频控制策略、控制逻辑优化,一次调频调节参数,机组协调作用对一次调频的反方向影响。
关键词:一次调频;调门特性曲线;调节参数Cause Analysis and Treatment of Primary Frequency Modulation Effect of Regulation引言一次调频是有差调节,当电力系统频率偏差目标频率时,发电机通过调速系统的自动反应,使发电机组有功出力增加或降低,从而自动减小频率偏差。
电网上周波幅度变化较小、变动周期较短的微小分量,主要靠汽轮发电机组本身的调节系统自动调整汽轮机调门完成,这个过程即为一次调频,DEH中的一次调频功能是将汽轮机实际转速与额定转速的差值通过折算转化为功率信号补偿或流量补偿叠加到汽轮机阀门输出指令上。
根据《南方区域发电厂并网运行管理实施细则,南方电监市场【2012】10号》和《广东电网发电机组一次调频运行管理规定,广电调市【2010】2号》要求,对发电机组一次调频的响应速度、调节幅度和调差率以及机组的调速系统、控制系统等进行定量或定性的技术要求。
1.一次调频概述湖南华润电力鲤鱼江有限公司DEH系统在机组并网后,即可投入一次调频功能。
当在CCS方式中,由CCS与DEH共同完成机组一次调频功能,CCS侧一次调频需要手动投入,在CCS方式下,由CCS和DEH共同完成一次调频功能,保证一次调频速度又保证了机组参与一次调频的持续性。
2.机组一次调频技术要求1)转速不等率≤5%2)一次调频死区≤±0.033Hz(±2r/min)3)当电网频率变化超过机组一次调频死区时,电液调节器机组响应时间应≤3s,在电网频率变化超过机组一次调频死区时开始的15s内,机组出力实际调节应达到理论调节量的60%。
完善DEH机组调频控制提高电网调频品质
次调频 ,使 系 统频 率恢 复到 正 常 。
1 4 故 障后 的一 次调 频幅 率 ( 整 量 / . 调 故障前 负荷 )
故 障 后各 机 组 的调 频 幅率 为 :液 调机 组 1 . %; 93
按 各机 组 的转动 惯 量来分 配 。
1 3 故 障 后 的 调 频 过 程 .
故 障发生 后 O ~ l ,机组 升速率 最 大 ,达 1 r s s 5(/
收 稿 日期 :20 —22 0 60— 6
当电 网频率 的降低 足 以引起 调速 系统 动作 后 ,各
作 者 简 介 :张龙 英 (9 7) 女 , 1 6 一 , 山西 太 原 人 , 级 工 程 师 , 科 。 高 本
发 电机 电磁 功 率变化 后 ,由于各 台机组 调速 系统
未 变化 ,所 以汽轮 机 主动 蒸 汽功率 与 发 电机 的 被动 电
之 比。扣 除 快 切 负 荷 部 分 ,有 效 的 负 荷 扰 动 率 为
7 。 .8
磁 功率 不平 衡 ,这 会使转 子转 速 变化 ,突变 的 主力 矩
中 图分 类 号 :TM1 3 3 文 献 标 识 码 :A
0 引 言
mi ) ・ ~, n s 机组 瞬 间负荷 的阶跃减小量 为其 额定 负荷 的2 %~ 3, 5 9 。故 障 1 后 ,升 速率开始下降 ,液调 机组 s 开始参 与调频 。故障 2 后转 速为 30 5 / n s 2 rmi ,升 速率
量 、提高 电网调频 品质有 很大的作用 。 1 线 路故 障情 况简介 ( 以一起 故障 为例 )
DEH控制系统高压调节门抖动分析及处理方法
DEH控制系统高压调节门抖动分析及处理方法山西漳电国电王坪发电有限公司安装了两台200MW、超高压、一次中间再热、双缸双排汽、直接空冷抽汽凝汽式汽轮发电机组。
汽轮机(东方电气集团东方汽轮机有限公司)的额定参数为:主汽门前蒸汽压力12.75MPa。
主汽门前蒸汽温度535℃,主汽门前蒸汽流量657.9t/h。
汽机控制系统为东汽公司生产的TD-6000系统。
两套DEH控制系统分别随机组在2011年8月和2011年10月投运。
在对该系统的日常检修维护中,汽轮机的高压调整汽门出现过多次抖动以及阀门开度跳变的状况,我们根据所发生的情况采取了有针对性的措施,讲问题解决,确保机组的安全稳定运行。
标签:DEH控制系统;高压调节门;调门抖动1 DEH控制系统简述DEH控制系统即数字电液控制系统,它的作用就是实现对汽轮机调整汽门的开度进行控制,以此来实现对汽轮机组的控制。
在机组运行过程中,DEH能否正常工作对机组的安全稳定运行有直接的影响。
近年来,因为汽轮机调整汽门发生抖动而导致的负荷波动、停机事件时有发生,因此对汽轮机调整汽门抖动的分析与研究工作有着重要的意义。
2 调节门控制回路王坪电厂的汽轮机共有六个伺服阀。
CV、ICV通过伺服阀与DEH的微机接口实现连续控制。
其余二个中压主汽阀RSV和二个高压主汽阀MSV采用电磁阀与DEH接口实现两位控制。
高压调整门采用美国Vickers生产的伺服阀,中压调整门为MOOG阀。
DEH控制伺服阀控制回路的原理为:控制系统发出阀位指令,伺服阀将系统发出的电流信号转变为油压信号,从而对油动机进行控制,控制汽轮机进汽量的大小。
LVDT位移传感器是与油动机相连接的,它能够将油动机的机械位移量转换成为电信号,将阀位的反馈信号送回控制系统。
如图1所示。
3 故障现象及其处理3.1 高压调门开度突变及其处理3.1.1 现象(1)#2机组CV4阀门开度突然增大,#2机组的负荷由200MW上升到208MW,然后CV4阀门开度又恢复到10%左右;之后CV4阀门的开度多次跳变,汽轮机组的油压等参数未发生异常情况。
DEH系统改造和优化的几点思考
DOI:10.16661/ki.1672-3791.2018.27.006DEH系统改造和优化的几点思考杨利钧(京能赤峰能源发展有限公司 内蒙古赤峰 024007)摘 要:伴随着我国科学技术的不断发展,数字电调技术也得到了进步。
为了更为有效地加强控制系统的建设质量,公司对DEH系统将进行相关的改造和优化。
DEH系统在公司的应用时间比较长,存在着一定的发展经验,但是受多方面因素的影响,传统意义层面的DEH系统存在着诸多的问题。
基于此,本文将主要从公司机组的发展实际入手,进而对系统改造方案可行性进行分析,最后就如何将XDPS-400e系统进行改造和优化提出几点建议。
关键词:DEH系统 改造 优化中图分类号:TM6 文献标识码:A 文章编号:1672-3791(2018)09(c)-0006-02现阶段,为了更好地发挥DEH系统的作用,我们需要对其进行改造。
对于我们公司来讲,就是将XDPS-400e控制系统进行改造,从而构建一个具有新结构的控制系统。
下面笔者将结合本人多年的工作经验,就DEH系统改造和优化进行全面的研究。
1 发电机组DEH控制系统的发展现状DEH系统自投运至今,会出现各方面的问题,比如设备老化、硬件性能下降等,最终将会极其容易的出现故障。
再就是XDPS-400e控制系统的网络结构也就无法满足时到发展需求。
伴随着智能电网建设进程的加快,电力系统对单元机组发电要求提升,并且在实际的考核中添加了诸多的单元机组考核指标。
基于此,我们为了全面提升公司电厂的稳定性,就需要对现有的GE新华XDPS-400e控制系统进行相关的改造和优化。
2 DEH系统改造和优化过程中出现的问题(1)DEH系统改造时间处于比较仓促的状态。
(2)对相关改造方案的设计、审查、应用等环节都存在不足。
(3)缺少充足的人力资源投入。
以上三方面的因素使DEH系统改造和优化过程中出现了比较多的问题,首先,没有对机组级的顺序控制进行全方位的测试,主要是因为机组缺少必备的停运机会,所以这就导致了机组运行过程中产生的问题得不到深度挖掘,为后期使用埋下了隐患。
DEH中汽轮机转速波动原因分析与处理
DEH中汽轮机转速波动原因分析与处理白城发电公司一期1号机组为660MW等级发电机组机组,汽轮机为哈尔滨汽轮机有限公司制造的660 MW超临界、一次中间再热、单轴三缸四排汽直接空冷凝汽式超临界机组。
热工分散控制系统为上海福克斯波罗控制工程有限公司I/A Series 智能自动化系列是开放式控制系统, DEH控制系统处理机FCP270为两对,第一对定义为基本控制站(BTC),完成超速保护和汽轮机基本控制功能;第二对定义为自动控制站(ATC),完成汽轮机参数监视和在线试验的功能。
转速测量装置为D421.5系列转速控制器。
1.故障描述白城发电公司1号机组采用高中压缸联合启动,冲转初期首先由高压调节门控制方式,高压主汽门全关,中压调节门全开。
准备升速至额定转速3000rpm,在2900-3000时,出现汽轮机转速波动大、全部调节门频繁开关的现象,调门反复开关3次,OPC反复动作3次。
2.原因分析及排查导致DEH系统阀门摆动,转速波动的可能原因有:1)蒸汽压力波动;2)阀门控制系统故障;3)转速探头支架松动;4)信号回路接地、电磁干扰;5)转速控制仪表故障。
按照以上所列原因逐一进行检查和排查:1)在历史站对蒸汽压力的历史曲线进行了检查,曲线平稳,无扰动现象,排除这个干扰。
2)检查就地油系统、油质、调门固定螺丝,结果正常;在关闭主汽门、中压主汽门后,依次单个实际开关就地调门,结果正常,此原因排除;3)打开2号轴承箱,对转速探头的安装支架进行检查,固定螺栓禁锢,无松动现象,此原因排除。
4)把DEH磁阻传感器信号端接入示波器,观察信号波形,发现在转速脉冲中有磁场干扰的交流分量,且在波形中无规则变化。
5)将磁阻探头安装在转速校验台上,进行检验。
波形正常,无波动现象。
6)将磁阻探头安装在转速校验台上,接线引到D421.5系列转速控制器端子排,启动校验台,升降转速。
转速控制器显示正常,信号无波动。
3.处理措施根据上述处理过程,可以确定由于现场工况的特殊性,福克斯波罗DEH系统转速测量仪表(D421.5系列转速控制器)抗干扰能力不强,需要对这一问题进行优化。
第四章DEH转速调节系统7

(3)超速限制动作 超速限制动作(OSP SOLENOIDS=1): 超速限制动作 : (4)汽轮机跳闸。 汽轮机跳闸。 汽轮机跳闸 跟踪值与跟踪指令有关。当为手动方式时, 跟踪值与跟踪指令有关。当为手动方式时,跟踪 值为基准值(REFERENCE),且此时转速设定值跟 值为基准值 , 踪实际转速,调节器的入口偏差为“ , 踪实际转速,调节器的入口偏差为“0”,以实现无 扰切换;当为其他跟踪指令时,跟踪值为“ 。 扰切换;当为其他跟踪指令时,跟踪值为“0”。 • 在机组未并网转速控制期间,若没有发生OSP 在机组未并网转速控制期间,若没有发生 动作或阀限限制等情况, 动作或阀限限制等情况,PID控制器模块的输出经 控制器模块的输出经 选择切换、小选后就成为自动指令(DEMAND)。由 选择切换、小选后就成为自动指令 。 该指令形成各阀门的开度指令送到相应的阀门位置 控制回路,使各阀门的开度改变, 控制回路,使各阀门的开度改变,从而改变进入汽 轮机的蒸汽量,进而改变机组的转速。 轮机的蒸汽量,进而改变机组的转速。 • 当机组并网后, 当机组并网后,将选择负荷控制回路的输出或锅 炉控制目标值作为自动指令(DEMAND);当发生汽 炉控制目标值作为自动指令 ; 轮机跳闸或OSP动作工况时,切换器 的输出为 , 动作工况时, 的输出为0, 轮机跳闸或 动作工况时 切换器T2的输出为 使自动指令(DEMAND)也为 。 也为0。 使自动指令 也为 • • •
第17次课 次课 DEH转速调节系统 转速调节系统
4-2转速调节系统 转速调节系统 四、转速调节回路分析
• 四、转速调节回路分析 • 转速调节回路的逻辑如图4-24所示,转 所示, 转速调节回路的逻辑如图 所示 速调节器为Pl型 为设定值, 为被调 速调节器为 型,SP为设定值,PV为被调 为设定值 为跟踪值, 为跟踪标志 为跟踪标志。 量,TR为跟踪值,TF为跟踪标志。TF=0 为跟踪值 调节器处于跟踪状态。 时,调节器处于跟踪状态。调节器的比例 增益、积分系数、 增益、积分系数、微分系数等可自适应调 整。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
DEH转速突变及改进
摘要:本文针对宁德电厂4号机组在点火冲转中DEH转速出现的突变现象,通过对DEH转速信号的录波进行分析,确定了合适的解决方案,保证了机组正常稳定并网,也提出了针对此类似故障的处理方法。
关键词:磁阻探头;转速传感器;干扰;突变;改进
1、前言
宁德电厂一期为哈尔滨CLN600-24.2/566/566型超临界、一次中间再热、三缸四排汽、单轴、双背压凝汽式汽轮机。
其中配置转速传感器8只,5只磁阻式转速探头进入DEH、机头转速表和大屏转速表,3只涡流转速探头进入TSI。
3个无源磁阻式转速式进入DEH用于DEH系统的转速控制及电超速保护,分别安装在汽轮机二瓦的测速齿轮处。
另有3个涡流式转速探头进入TSI系统,用于TSI超速保护,安装在盘车处。
2、转速异常突升及原因分析
2.1汽机冲转时转速信号突升
2012年6月16日8:30分4号机组汽轮机大修后进行冲转,在升到800转以后,DEH系统3个转速信号开始大范围的波动,随着转速的升高波动范围随即增大,无法稳定转速在2000rpm进行暖机,机组打闸停机。
在此期间,TSI转速和机头转速表指示稳定,无摆动现象。
2012年6月16日9:30分开始冲转,同样在800rpm以后三个探头出现不同跳变,因选择不同通道后,冲转2000rpm暖机,暖机过程中转速曲线稳定无毛刺,暖机结束后冲到2900rpm进行阀切,转速也正常,到3000转后转速也正常做试验,试验后打闸,当转速降至1000rpm时转速又开始跳变。
2.2转速突升原因分析:
第一次冲转后转速突升,更改接地方式后,第二次冲转时还会出现突升,通
过第二次冲转时对DEH转速信号的进行录波,从FLUKE 示波器上可以发现在1000rpm左右时,转速信号波形有干扰,每个波形中均有一个谐波,谐波的幅值约为1.25V,如下图1所示。
当转速超过1200rpm时转速波形又正常,说明转速在在800-1100rpm时,信号有干扰。
通过对图1波形电压的分析,其中探头电动势最大幅值为41.6V,有效值为21.7V,谐波电压为1.25V,因为谐波电压1.25V 已经高于Speed Detector Model系统卡件最低门槛值1V,即卡件检测到的脉冲数为正常21.7V的峰峰值加上1.25V的峰峰值的脉冲数之和,即脉冲数增加一倍,所以显示的转速值也增加一倍,可以判断出转速突变的原因为干扰信号引起。
图1:DEH转速探头2测点在1075rpm的波形图
2.2.1对转速测量回路进行检查,检查电缆的干扰情况。
DEH转速磁阻探头经中间接线箱,通过中间连接电缆直接接入Ovation系统Speed Detector Model 卡件的B15(IN+)和B16(IN-)。
连接电缆屏蔽连接有两种方式:一种是探头侧不接地,中间连接电缆的屏蔽线在DCS的Speed Detector Model卡件的特性模件的Earth GND(C17端子)端子接地。
另一种是探头侧电缆屏蔽接地,中间连接电缆的屏蔽线接在DCS的Speed Detector Model卡件的特性模件的SHD端子(B16端子)上。
经过检查电缆型号为双层屏蔽计算机电缆符合要求,检查电缆接地接线符合要求,就地电缆槽盒为全部均为信号电缆,更改电缆的接地方式后,同样出现跳变情况,排除了电缆接线问题。
2.2.2对DCS组态及抗干扰情况进行检查:
检查在DCS卡件组态中的四个列表,并对Speed Detector Model卡件设置的参数进行核对。
在config列表选项中设置转速卡件型号为1C31189 (Revisions 2 and 3)。
在Module列表选项中设置齿数为60(现场实际齿数),减速比为1;在Overspeed Limit(RPM)设置为3300rpm,则Overspeed Limit(PPS)at Module 自动设置为3300,Nominal Speed 设置为3000RPM。
在Digital channels 选项中设置继电器动作,即可以设置超速动作继电器。
在Analog channels中设置模拟量转速的输出,即显示的转速值。
Speed Detector Model卡件的门槛电压为卡件的特性模块自动设置,最小检测电压为1V,自动门槛值需要的最小信号的幅值为1V峰峰值,最小频率为0.72HZ。
以上组态设置均正确。
为排除端子板与模件的内外部抗干扰能力确定将一个探头接入机头转速表中,同样机头转速表也出现跳变,排除了DCS卡件的问题。
2.2.3对传感器抗干扰方面检查
检查油质对是否无源磁电式转速探头产生磁力干扰;检查探头的安装位置是否不合适,检查安装记录,核对探头安装方式及间距均正确。
2.2.4转速传感器类型不匹配方面检查
将用于机头转速表显示的探头挪用,将DEH转速探头1的接线改为机头转速表的。
将DEH转速探头1的接线接入机头转速表,DEH转速测点1显示稳定,趋势平滑无毛刺,通过对安装探头的阻值比较,DEH转速探头阻值均为375Ω,为机头转速表的阻值为695Ω。
从示波器中的波形可以读出转速探头2为375Ω的探头在2900rpm时幅值为120V,电压值有效值为77V。
示波器中的波形可以读出转速探头1在3000rpm时幅值为58V,电压值为有效值41.1V。
说明阻抗大的转速探头的产生的电动势的幅值小,即使有谐波的干扰,幅值也低于Speed Detector Model的最低门槛值,也不会产生影响,即抗干扰能力强。
3、处理方案:
经过DEH转速在1075rpm的波形图分析,谐波电压1.25V已经高于卡件的最低1V门槛值。
需要采取措施把谐波电压降低,使得低于1V。
通过对信号录波分析和比对,通过计算,在转速探头线上并联一个5至10KΩ的电阻,降低探头感应电动势的幅值,从而降低谐波电压的幅值,使得在1000rpm时谐波的幅值低于1V门槛值,确保测量信号不被干扰。
按照上述方案进行改进,对转速探头2和转速探头3分别加10KΩ的电阻并联卡件的B15(IN+)和B16(IN-)的两端子上,机组启动冲转过程中,通过示波器录波,波形平滑,未出现谐波,机组转速测量准确,转速曲线平滑,稳定可靠,无任何波动,机组一次并网成功。
4、结束语
该机组自2012年6月17日并网,通过一个月的使用和观察,转速正常,无跳变。
证明该系统改进技术成熟,功能完善,性能稳定。
为机组的稳定并网,安全运行提供了保证。
同时也供相同类型机组参考。
参考文献
[1]顾朋喜《600MW超临界汽轮机启动中转速异常分析及对策》,电力安全技术2008年第3期。
[2]刘德平《磁阻式转速测量传感器的缺陷及改进》,汽轮机技术,1991年2月第33卷第1期。