Modbus_Protocol_Chinese
Modbus-TCP协议说明技术文档说明书

Modbus-TCP协议文档说明
1、指令格式说明(文档中所有数据要求为16进制)
(1)、功能码03---查询从设备寄存器数据内容
主设备报文
说明:数据区总共有36组数据,72个字节;CRC校验码要根据实际数据得出;
数据最小为:0000H,最大值为:2710H(十六进制),10000D(十进制)
(2)、功能码06---对从设备单个寄存器置数
主设备报文
序列数据举例数据内容字节数
2 10000为此次通信事务处理标识符,一般每次通信之后将被要求加1
以区别不同的通信数据报文
20000表示协议标识符,固定2 30006为数据长度,用来指示接下来数据的长度(4-7序列数据长度)2
401从设备地址,可变(1-256),说明为11
从设备正确报文
协议转换设置(网络通讯接口产品可选择使用Modbus-TCP协议)
寄存器地址(Hex)寄存器内容寄存器个数寄存器状态数据范围0060H协议转换1写00:Modbus-RTU协议
01:Modbus-TCP协议
协议修改命令举例:
从设备地址功能码寄存器地址写入数据CRC-L CRC-H 01H06H00H60H00H01H48H14H 说明:用06功能码协议修改为Modbus-TCP通讯协议;
数据返回格式:
使用发命令修改的工具软件可以到本公司网站上下载一个测试工具去发命令修改,下载地址为:
/z.aspx?id=71&P=upload/file/sscom5.13.1%E5%B7%A5%E5%85%B7.zip
软件页面设置与发送格式如下:(产品出厂默认IP为192.168.2.720108端口),发送后有数据返回即为修改成功.。
MODBUS协议中文版

第一章Modbus协议□介绍Modbus协议介绍□两种串行传输模式□信息帧□错误检查方法Modbus协议介绍Modbus可编程控制器之间可相互通讯,也可与不同网络上的其他设备进行通讯,支撑网络有Modicon的Modbus和Modbus+工业网络。
网络信息存取可由控制器内置的端口,网络适配器以及Modicon提供的模块选件和网关等设备实现,对OEM(机械设备制造商)来说,Modicon可为合作伙伴提供现有的程序,可使Modbus+网络紧密地集成到他们的产品设计中去。
Modicon的各种控制器使用的公共语言被称为Modbus协议,该协议定义了控制器能识别和使用的信息结构。
当在Modbus网络上进行通讯时,协议能使每一台控制器知道它本身的设备地址,并识别对它寻址的数据,决定应起作用的类型,取出包含在信息中的数据和资料等,控制器也可组织回答信息,并使用Modbus协议将此信息传送出去。
在其他网络上使用时,数据包和数据帧中也包含着Modbus协议。
如,Modbus+或MAP网络控制器中有相应的应用程序库和驱动程序,实现嵌入式Modbus协议信息与此网络中用子节点设备间通讯的特殊信息帧的数据转换。
该转换也可扩展,处理节点地址,路由,和每一个特殊网络的错误检查方法。
如包含在Modbus协议中的设备地址,在信息发送前就转换成节点地址,错误检查区也用于数据包,与每个网络的协议一致,最后一点是需用Modbus协议,写入嵌入的信息,定义应处理的动作。
图1说明了采用不同通讯技术的多层网络中设备的互连方法。
在信息交换中,嵌入到每个网络数据包中的Modbus 协议,图1:Modbus 协议应用示意图* MB+为 Modbus主处理器4个Modus设备或网络编程器 编程器(去MB+)S980(去MAP) AT/HC-984 和 HOST/MMHI AT/HC-984HOST/MMHI 984A/B 和S985Modbus 上的数据传输Modicon 控制器上的标准Modbus 端口是使用一个RS-232兼容的串行接口,定义了连接器,接线电缆,信号等级,传输波特率,和奇偶校验,控制器可直接或通过调制解调器(以后简称Modems)接入总线(网络)。
ModbusTcp协议详解
ModbusTcp协议详解Modbus TCP协议详解协议简介:Modbus是一种通信协议,用于在自动化系统中传输数据。
Modbus TCP是Modbus协议的一种变体,它使用TCP/IP作为传输层协议,通过以太网进行通信。
本文将详细介绍Modbus TCP协议的各个方面,包括协议结构、数据格式、功能码和通信流程等。
一、协议结构Modbus TCP协议采用客户端-服务器模型,其中客户端是发起请求的一方,而服务器是提供响应的一方。
通信的基本单位是数据包,数据包由不同的字段组成,包括事务标识符、协议标识符、长度字段、单元标识符、功能码和数据等。
1. 事务标识符(Transaction Identifier):用于标识一个事务,客户端发送的请求和服务器返回的响应中使用相同的事务标识符。
2. 协议标识符(Protocol Identifier):用于标识Modbus协议的版本号,普通为0。
3. 长度字段(Length Field):指示数据包的长度。
4. 单元标识符(Unit Identifier):用于标识服务器设备的地址。
5. 功能码(Function Code):用于指定请求的类型,包括读取数据、写入数据、读取文件记录等。
6. 数据(Data):根据功能码的不同,数据字段可以包含读取的数据、写入的数据或者其他相关信息。
二、数据格式Modbus TCP协议中的数据格式采用了大端字节序(Big-Endian)表示。
数据包中的各个字段均采用16位的整数表示,其中高位字节在前,低位字节在后。
三、功能码Modbus TCP协议定义了多种功能码,用于不同的数据操作。
以下是常用的功能码及其功能描述:1. 读取线圈状态(Read Coils):用于读取远程设备的线圈状态,返回线圈的开关状态。
2. 读取离散输入状态(Read Discrete Inputs):用于读取远程设备的离散输入状态,返回输入信号的状态。
3. 读取保持寄存器(Read Holding Registers):用于读取远程设备的保持寄存器的值。
MODBUS协议中文版
设备地址 功能代码 8位 数据字节
错误校验
从机响应信息
错则码查响误修询应03校改::查从将验功机询查区能正中询的码常的从一,响功机指些应能,明信时代并为息,码读错响,为保误为应被持响功从寻寄应能机址存。码提的器并是供从。图在查一并机数询种用设2:据功校寄备主字能验存应从节码方器执查中的法的行询含应,内的响有答以容动应一,保作作周个数证响类期代据信应型码字息。。该,节内数数来包容据据说含的字区明从完节必错机整中须误采性包含,集。含有错的从误告数机检之据须查从,执区机如行读允寄功许取存能寄主器的机存值各确器或附认的状加态有起信始。效息如地的,出址信如现及息功错数内能误量容代,,。
RTU 模式
点是控在制相器同以波特RT率U下模其式传在输M的o字db符us的总密线度上高进于行通AS讯C时II 模,信式息,中每的个每信息8 位必字须节连分续成传输2 个。 4 位 16 进制的字符,该模式的主要优
RTU编模码式系中统每:个8字位节二的进格制式,:十六进制 , 0-9 A-F
数据位:
在查从息信的一询息控台响级制从应,器机周尽。设期管备:网返络回通一讯个方响法应是,对类等似的,,当但一M台o控db制us器协接议受仍信采息用时主,从它方就式组,织若一一个台从控机制设器备作的为响主应机信设息备,发并送返一回个至信原息发,送则信可
主机查询信息
设备地址 功能代码 8位 数据字节 错误校验
2 Modbus Protocol
PI-MBUS-300
提供了图设1 备说间明能了够采交用换不数同据通的讯公技共术的的语多言层。网络中设备的互连方法。在信息交换中,嵌入到每个网络数据包中的 Modbus 协议, 主处理器
去( MB+) 去 S980( MAP)
modbus tcp通讯协议详解与实例演示

Modbus TCP是一种基于TCP/IP网络的通信协议,用于在工业自动化系统中实现设备间的数据交换。
以下是Modbus TCP通讯协议的详细解释和一个实例演示:1. Modbus TCP协议概述:- Modbus TCP是Modbus协议的一种变体,使用TCP/IP作为传输层协议,通过以太网进行数据通信。
- 它基于客户端-服务器架构,其中客户端发起数据请求,而服务器响应请求并提供数据。
- Modbus TCP使用简单的请求-响应模型,支持读取和写入数据寄存器、线圈、输入寄存器和离散输入等。
2. Modbus TCP帧结构:- Modbus TCP帧由标头和数据部分组成。
- 标头包括事务标识符、协议标识符、长度字段和单元标识符。
- 数据部分包含功能码、数据和错误检查字段。
3. Modbus TCP功能码:- Modbus TCP支持多种功能码用于不同的操作,如读取、写入、读取多个寄存器等。
- 常见的功能码包括读取线圈状态(0x01)、读取输入状态(0x02)、读取保持寄存器(0x03)、写单个寄存器(0x06)等。
4. Modbus TCP实例演示:- 假设有一个Modbus TCP服务器设备,IP地址为192.168.0.100,端口号为502。
- 客户端想要读取该设备上的保持寄存器中的数据。
- 客户端发送一个读取保持寄存器的请求帧,包括事务标识符、协议标识符、长度字段、单元标识符和功能码等。
- 服务器接收到请求后,解析请求帧,根据功能码读取保持寄存器中的数据。
- 服务器将读取到的数据封装成响应帧,并发送给客户端。
- 客户端接收到响应帧后,解析响应帧,提取出所需的数据。
Modbus TCP协议是一种常用的工业自动化通信协议,广泛应用于控制系统、仪表设备和传感器等。
通过使用Modbus TCP,不同的设备可以方便地进行数据交换和远程控制。
在实际应用中,可以使用各种编程语言和开发工具来实现Modbus TCP通讯,如Python、C#、Java等。
ModbusTcp协议详解
ModbusTcp协议详解Modbus TCP协议详解1. 概述Modbus TCP协议是一种基于TCP/IP协议的通信协议,用于在工业自动化系统中实现设备之间的通信。
本协议详解将介绍Modbus TCP协议的基本原理、数据帧格式、功能码以及通信流程。
2. 基本原理Modbus TCP协议采用客户端-服务器模型,其中客户端是发送请求的设备,而服务器则是接收请求并提供响应的设备。
通信基于TCP/IP协议栈,使用标准的Modbus功能码来实现数据的读取和写入。
3. 数据帧格式Modbus TCP协议的数据帧格式如下:- 事务标识符(2字节):用于标识请求和响应的对应关系。
- 协议标识符(2字节):固定为0x0000。
- 长度字段(2字节):指示后续数据的字节数。
- 单元标识符(1字节):用于区分不同的设备。
- 功能码(1字节):指示请求的操作类型。
- 数据域:包含请求或响应的数据。
4. 功能码Modbus TCP协议定义了一系列功能码,用于不同的操作类型。
常见的功能码包括:- 读取线圈状态(0x01):用于读取开关量输出状态。
- 读取输入状态(0x02):用于读取开关量输入状态。
- 读取保持寄存器(0x03):用于读取16位的数据。
- 读取输入寄存器(0x04):用于读取输入寄存器中的数据。
- 强制单线圈(0x05):用于控制开关量输出状态。
- 写单个保持寄存器(0x06):用于写入16位的数据。
- 写多个保持寄存器(0x10):用于写入多个16位的数据。
5. 通信流程Modbus TCP协议的通信流程如下:- 客户端向服务器发送请求数据帧,包括事务标识符、协议标识符、长度字段、单元标识符、功能码以及请求的数据。
- 服务器接收到请求后,根据功能码进行相应的处理,并生成响应数据。
- 服务器向客户端发送响应数据帧,包括事务标识符、协议标识符、长度字段、单元标识符、功能码以及响应的数据。
- 客户端接收到响应后,根据事务标识符进行对应关系的匹配,获取响应的数据。
【ModbusTCP协议详解】内容有点多,但讲得很详细!

【ModbusTCP协议详解】内容有点多,但讲得很详细!简介Modbus由MODICON公司于1979年开发,是一种工业现场总线协议标准。
1996年施耐德公司推出基于以太网TCP/IP的Modbus 协议:ModbusTCP。
Modbus协议是一项应用层报文传输协议,包括ASCII、RTU、TCP三种报文类型。
标准的Modbus协议物理层接口有RS232、RS422、RS485和以太网接口,采用master/slave方式通信。
ModbusTCP数据帧ModbusTCP的数据帧可分为两部分:MBAP+PDU。
报文头MBAPMBAP为报文头,长度为7字节,组成如下:事务处理标识协议标识长度单元标识符2字节2字节2字节1字节内容解释事务处理标识可以理解为报文的序列号,一般每次通信之后就要加1以区别不同的通信数据报文。
协议标识符00 00表示ModbusTCP协议。
长度表示接下来的数据长度,单位为字节。
单元标识符可以理解为设备地址。
帧结构PDUPDU由功能码+数据组成。
功能码为1字节,数据长度不定,由具体功能决定。
功能码Modbus的操作对象有四种:线圈、离散输入、保持寄存器、输入寄存器。
对象含义线圈PLC的输出位,开关量,在Modbus中可读可写离散量PLC的输入位,开关量,在Modbus中只读输入寄存器PLC中只能从模拟量输入端改变的寄存器,在Modbus中只读保持寄存器PLC中用于输出模拟量信号的寄存器,在Modbus中可读可写根据对象的不同,Modbus的功能码有:功能码含义0x01 读线圈0x05 写单个线圈0x0F 写多个线圈0x02 读离散量输入0x04 读输入寄存器0x03 读保持寄存器0x06 写单个保持寄存器0x10 写多个保持寄存器说明更详细的表代码中文名称英文名位操作/字操作操作数量01 读线圈状态READ COIL STATUS 位操作单个或多个02 读离散输入状态READ INPUT STATUS 位操作单个或多个03 读保持寄存器READ HOLDING REGISTER 字操作单个或多个04 读输入寄存器READ INPUT REGISTER 字操作单个或多个05 写线圈状态WRITE SINGLE COIL 位操作单个06 写单个保持寄存器WRITE SINGLE REGISTER 字操作单个15 写多个线圈WRITE MULTIPLE COIL 位操作多个16 写多个保持寄存器WRITE MULTIPLE REGISTER 字操作多个PDU详细结构0x01:读线圈在从站中读1~2000个连续线圈状态,ON=1,OFF=0•请求:MBAP 功能码起始地址H 起始地址L 数量H 数量L(共12字节)•响应:MBAP 功能码数据长度数据(一个地址的数据为1位)•如:在从站0x01中,读取开始地址为0x0002的线圈数据,读0x0008位•00 01 00 00 00 06 01 01 00 02 00 08•回:数据长度为0x01个字节,数据为0x01,第一个线圈为ON,其余为OFF•00 01 00 00 00 04 01 01 01 010x05:写单个线圈将从站中的一个输出写成ON或OFF,0xFF00请求输出为ON,0x000请求输出为OFF•请求:MBAP 功能码输出地址H 输出地址L 输出值H 输出值L (共12字节)•响应:MBAP 功能码输出地址H 输出地址L 输出值H 输出值L (共12字节)•如:将地址为0x0003的线圈设为ON•00 01 00 00 00 06 01 05 00 03 FF 00•回:写入成功•00 01 00 00 00 06 01 05 00 03 FF 000x0F:写多个线圈将一个从站中的一个线圈序列的每个线圈都强制为ON或OFF,数据域中置1的位请求相应输出位ON,置0的位请求响应输出为OFF•请求:MBAP 功能码起始地址H 起始地址L 输出数量H 输出数量L 字节长度输出值H 输出值L•响应:MBAP 功能码起始地址H 起始地址L 输出数量H 输出数量L0x02:读离散量输入从一个从站中读1~2000个连续的离散量输入状态•请求:MBAP 功能码起始地址H 起始地址L 数量H 数量L(共12字节)•响应:MBAP 功能码数据长度数据(长度:9+ceil(数量/8))•如:从地址0x0000开始读0x0012个离散量输入•00 01 00 00 00 06 01 02 00 00 00 12•回:数据长度为0x03个字节,数据为0x01 04 00,表示第一个离散量输入和第11个离散量输入为ON,其余为OFF•00 01 00 00 00 06 01 02 03 01 04 000x04:读输入寄存器从一个远程设备中读1~2000个连续输入寄存器•请求:MBAP 功能码起始地址H 起始地址L 寄存器数量H 寄存器数量L(共12字节)•响应:MBAP 功能码数据长度寄存器数据(长度:9+寄存器数量×2)•如:读起始地址为0x0002,数量为0x0005的寄存器数据•00 01 00 00 00 06 01 04 00 02 00 05•回:数据长度为0x0A,第一个寄存器的数据为0x0c,其余为0x00•00 01 00 00 00 0D 01 04 0A 00 0C 00 00 00 00 00 00 00 00 0x03:读保持寄存器从远程设备中读保持寄存器连续块的内容•请求:MBAP 功能码起始地址H 起始地址L 寄存器数量H 寄存器数量L(共12字节)•响应:MBAP 功能码数据长度寄存器数据(长度:9+寄存器数量×2)•如:起始地址是0x0000,寄存器数量是 0x0003•00 01 00 00 00 06 01 03 00 00 00 03•回:数据长度为0x06,第一个寄存器的数据为0x21,其余为0x00•00 01 00 00 00 09 01 03 06 00 21 00 00 00 000x06:写单个保持寄存器在一个远程设备中写一个保持寄存器•请求:MBAP 功能码寄存器地址H 寄存器地址L 寄存器值H 寄存器值L(共12字节)•响应:MBAP 功能码寄存器地址H 寄存器地址L 寄存器值H 寄存器值L(共12字节)•如:向地址是0x0000的寄存器写入数据0x000A•00 01 00 00 00 06 01 06 00 00 00 0A•回:写入成功•00 01 00 00 00 06 01 06 00 00 00 0A0x10:写多个保持寄存器在一个远程设备中写连续寄存器块(1~123个寄存器)•请求:MBAP 功能码起始地址H 起始地址L 寄存器数量H 寄存器数量L 字节长度寄存器值(13+寄存器数量×2)•响应:MBAP 功能码起始地址H 起始地址L 寄存器数量H 寄存器数量L(共12字节)•如:向起始地址为0x0000,数量为0x0001的寄存器写入数据,数据长度为0x02,数据为0x000F•00 01 00 00 00 09 01 10 00 00 00 01 02 00 0F•回:写入成功•00 01 00 00 00 06 01 10 00 00 00 01Modbus TCP 示例报文ModBusTcp与串行链路Modbus的数据域是一致的,具体数据域可以参考串行Modbus。
Modbus协议说明中文版
Modbus协议说明中文版Modbus是一种开放的通信协议,用来在工业领域中的设备之间传输数据。
它最早由Modicon公司在1979年开发,用于连接和控制PLC(可编程逻辑控制器)。
现在,Modbus协议已经成为了工业自动化领域最为广泛使用的通信协议之一Modbus协议使用简单、灵活且可靠,适用于各种通信媒介,如串行线缆、以太网和RFID。
它可以通过RS-232、RS-422、RS-485等串行通信方式或TCP/IP协议进行数据传输。
Modbus协议的主要特点包括:1. 简单易用:Modbus协议的指令集简单明了,包括了读和写寄存器的功能。
使用者可以通过设置寄存器的地址和类型来直接读取或写入设备的数据,易于操作。
2. 支持多种数据格式:Modbus协议支持多种数据格式,如二进制、十进制、十六进制和BCD码,便于不同设备之间的数据交换。
3. 支持多个从设备:Modbus协议可以同时连接多个从设备到一个主设备上,方便用户对多个设备进行统一管理和控制。
4. 灵活可扩展:Modbus协议可以根据实际需要进行灵活扩展和定制,包括数据长度、通信速率、通信模式等。
1.主设备发送请求指令:主设备通过通信媒介向从设备发送读写请求指令,包括从设备地址、功能码、寄存器地址和数据等。
2.从设备接收请求指令:从设备接收到请求指令后,根据指令中的寄存器地址和功能码执行相应的操作。
3.从设备发送响应消息:从设备执行完操作后,将结果数据封装成响应消息,包括从设备地址、功能码和数据等,发送给主设备。
4.主设备接收响应消息:主设备接收到响应消息后,解析其中的数据,完成对设备的控制或数据读取操作。
Modbus协议在工业自动化控制中有着广泛的应用,包括了监控和控制系统、远程终端单元(RTU)、人机界面(HMI)等。
它可以实现对灯光、电机、传感器等设备的远程监控和控制,提高工业生产的效率和安全性。
总而言之,Modbus协议作为一种开放的通信协议,通过简单易用、灵活扩展等特点,成为了工业自动化领域中最为广泛使用的通信标准之一、通过使用Modbus协议,工业设备可以方便地实现数据交换和远程控制,提高了工业自动化系统的集成性和可靠性。
MODBUS通讯协议及编程

MODBUS通讯协议及编程MODBUS通讯协议是由Modicon(现在的施耐德电气公司)公司在1979年开发的,目的是为了实现其PLC(Programmable Logic Controller,可编程逻辑控制器)产品与外部设备之间的通信。
随着时间的推移,MODBUS已经成为了工业自动化领域中最常用的通信协议之一MODBUS通讯协议基于Master/Slave(主/从)架构,主要有三种传输方式:串行传输、串行ASCII以及串行RTU。
其中,串行传输方式使用RS-232或RS-485接口进行通信,而串行ASCII和串行RTU则使用标准的ASCII和二进制格式进行数据传输。
在实际的应用中,串行RTU是最常用的一种传输方式,因为它在数据传输速度和可靠性方面都具有良好的表现。
MODBUS通讯协议的编程接口有两种:MODBUSRTU/ASCII和MODBUSTCP/IP。
MODBUSRTU/ASCII是通过串行接口传输数据的方式,它使用的函数包括读写单个寄存器、读写多个寄存器等。
MODBUSTCP/IP是通过以太网传输数据的方式,它使用的函数与MODBUSRTU/ASCII相同,但是需要使用不同的协议栈来实现。
在MODBUS通讯协议的编程中,需要用到一些重要的概念,例如Slave ID、Function Code和Register Address等。
Slave ID是指设备的地址,用于识别通信的目标设备。
Function Code是指功能码,用于指定需要执行的操作,例如读取寄存器、写入寄存器等。
Register Address是指寄存器地址,用于指定需要读写的寄存器的位置。
在具体的编程实现中,可以使用各种编程语言来编写MODBUS通讯协议的程序。
例如C语言、Python等。
通过调用相应的MODBUS库函数,可以实现与MODBUS设备的通信。
在编程过程中,需要注意设置正确的串口参数、IP地址以及端口号等。
MODBUS通讯协议在工业自动化中有着广泛的应用。
ModbusTCP通讯协议
ModbusTCP通讯协议协议名称:ModbusTCP通讯协议摘要:本协议旨在定义ModbusTCP通讯协议的标准格式,以实现在TCP/IP网络上进行数据通信的目的。
该协议适用于工业自动化领域,用于实现设备之间的数据交换和控制操作。
1. 引言1.1 目的本协议的目的是为了规范ModbusTCP通讯协议的标准格式,以确保不同厂商的设备能够互相兼容和交互操作。
1.2 背景ModbusTCP是一种基于TCP/IP协议的通讯协议,常用于工业自动化系统中的设备间通信。
本协议旨在定义ModbusTCP通讯协议的标准格式,以便不同厂商的设备能够通过网络进行数据交换和控制操作。
2. 术语和定义在本协议中,以下术语和定义适用:2.1 ModbusTCP:基于TCP/IP协议的通讯协议,用于工业自动化设备之间的数据交换和控制操作。
2.2 客户端:发起通讯请求的设备或程序。
2.3 服务器:接收并处理客户端的通讯请求的设备或程序。
2.4 数据单元标识符(PDU):用于标识通讯数据单元的字段。
2.5 Modbus寄存器:用于存储和交换数据的内部存储单元。
3. 协议格式3.1 帧格式ModbusTCP通讯协议的帧格式如下所示:- 事务标识符(2字节):用于标识通讯事务的唯一标识符。
- 协议标识符(2字节):用于标识ModbusTCP协议。
- 长度字段(2字节):用于指示后续数据的长度。
- 单元标识符(1字节):用于标识通讯设备的唯一标识符。
- PDU(可变长度):包含功能码和数据字段。
3.2 PDU格式PDU包含以下字段:- 功能码(1字节):用于指示要执行的操作类型。
- 数据字段(可变长度):包含操作所需的数据。
4. 功能码ModbusTCP通讯协议定义了一系列功能码,用于指示不同的操作类型。
以下是一些常用的功能码:4.1 读取线圈状态(功能码01)该功能码用于读取指定线圈的状态。
客户端发送请求后,服务器将返回线圈的状态信息。
MODBUS通讯协议中文版
MODBUS通讯协议中文版
一、简介
MODBUS通讯协议是一种基于主从结构的串行通讯协议,用于在不同
设备之间进行数据通讯。
MODBUS协议最早由Modicon公司于1979年设计,现已广泛应用于工业自动化领域,成为工业通讯领域中最为常用的通讯协
议之一、本文将对MODBUS通讯协议进行详细介绍。
二、MODBUS协议概述
MODBUS协议定义了一套标准的通信帧格式,用于在主设备和从设备
之间传输数据。
MODBUS协议通过使用不同的功能码来实现不同的功能操作,如读取数据、写入数据等。
MODBUS协议支持多种不同的物理介质,
包括串行通信、以太网等。
1.MODBUSASCII模式
2.MODBUSRTU模式
3.MODBUSTCP模式
三、MODBUS协议的数据帧格式
1.MODBUSASCII模式数据帧格式
2.MODBUSRTU模式数据帧格式
3.MODBUSTCP模式数据帧格式
四、MODBUS协议的应用领域
总结:
MODBUS通讯协议是一种广泛应用于工业自动化领域的通讯协议,通过定义一套标准的数据帧格式,实现不同设备之间的数据通讯。
该协议支持多种不同的物理介质,包括串行通信和以太网等。
MODBUS协议在不同的通讯方式下,有着不同的数据帧格式。
MODBUS协议的优点在于简单易用、通信速度快、可靠性高等,常用于设备之间的实时数据传输和参数配置等应用。
Modbus_通信协议说明
Modbus_通信协议说明第⼆章:Modbus 通信协议说明Modbus 通信协议基本上是遵循Master and Slave 的通信步骤,有⼀⽅扮演Master ⾓⾊采取主动询问⽅式,送出Query Message 给Slave ⽅,然后由Slave ⽅依据接到的Query Message 内容准备Response Message 回传给Master 。
即使⽬前硬件通信已经可以达到双⽅互相主动通信的能⼒,但是于Modbus 通信协议的规定,必须⼀⽅为Master ,另⼀⽅为Slave 不能互换⾓⾊。
⼀般使⽤上,监控系统(HMI)都为Master ,PLC 、电表、仪表等都为Slave ,HMI 系统⼀直Polling Slave 的各种relay and register 最新数值,然后做显⽰及各种逻辑计算及控制调整等处理。
1 共享的通信协议1.1 Query and Response Cycle图(2-1):Master / Slave and Query / Response CycleDevice Address :表⽰该设备的编号,于同⼀个串⾏式⽹络上此为唯⼀的号码。
于TCP/IP 上可以使⽤IP Address 区分之,所以该Device Address 保留此字段可以使⽤或不使⽤。
Function Code :表⽰要求Slave 处理各种不同资料或程序的Command ,以不同的Function Number 来区分之。
Eight-Bit Data Bytes :依据Function Code ⽽有不同的详细资料定义,Slave 设备依据此两字段资料,做各种处理。
Error Check :当通信传送资料时,因考虑信号可能会受外界⼲扰,所以必须加上Error Check Code ,使得message 接收⽅可以就接到的资料再计算⼀次Code ,如果正确则做正常处理,不正确则不做处理。
Modbus通信协议中文版
Modbus通信协议中文版Modbus协议采用了主从结构,主要包括Modbus主站和Modbus从站两个组件。
Modbus主站负责发送请求,而Modbus从站负责响应请求,并提供所需的数据。
主从结构使得在工业控制系统中,多个设备可以通过Modbus协议进行通信与控制。
Modbus协议的特点包括简单、开放、可靠性高等。
它使用简单的数据格式,易于实现,适用于不同平台和设备。
同时,Modbus协议基于TCP/IP协议,可以通过以太网或串行接口进行通信,满足不同的通信需求。
在Modbus通信中,数据被分为寄存器和线圈两种类型。
寄存器用于存储和传输实际的数据,而线圈用于存储和传输布尔类型数据。
Modbus协议定义了多种功能码,用于读取和写入寄存器和线圈中的数据。
例如,功能码03用于读取寄存器中的数据,而功能码16用于写入寄存器中的数据。
Modbus通信协议的数据传输方式包括ASCII模式和RTU模式。
ASCII模式使用ASCII编码进行数据传输,包括起始字符、设备地址、功能码、数据等信息。
RTU模式使用二进制编码进行数据传输,包括起始位、设备地址、功能码、数据等信息。
ASCII模式和RTU模式在数据传输的速度和可靠性上有所不同,根据实际需求选择合适的传输方式。
Modbus协议在工业自动化领域有广泛的应用。
它可以用于监控和控制各种设备,如传感器、执行器、PLC等。
Modbus协议具有良好的兼容性,可以与其他通信协议进行互操作。
同时,Modbus协议的开放性使得用户能够根据自己的需求进行定制和扩展。
总之,Modbus通信协议是一种简单、灵活、可靠的工业自动化通信协议。
它为不同设备之间的通信与控制提供了一种标准化的解决方案,广泛应用于工业控制系统中。
随着工业自动化的发展,Modbus协议将继续发展壮大,为工业控制系统的通信与控制提供更多的可能性。
modbus协议中文版
modbus协议中文版Modbus协议中文版。
Modbus协议是一种用于工业自动化领域的通信协议,它被广泛应用于各种工业控制设备之间的通讯。
本文将对Modbus协议进行详细介绍,包括其基本原理、通讯方式、数据传输格式等内容,旨在帮助读者更好地理解和应用Modbus协议。
首先,让我们来了解一下Modbus协议的基本原理。
Modbus协议是一种基于主从结构的通信协议,通常由一个主站和多个从站组成。
主站负责发起通讯请求,而从站则负责响应主站的请求,并向主站返回所需的数据。
在Modbus协议中,通讯可以通过串行口或者以太网进行,这使得Modbus协议具有较强的通讯灵活性和适用性。
其次,我们需要了解Modbus协议的通讯方式。
Modbus协议支持两种通讯方式,分别是RTU模式和ASCII模式。
在RTU模式下,数据以二进制形式传输,通讯速度较快,适用于长距离通讯;而在ASCII模式下,数据以ASCII码形式传输,通讯速度较慢,但易于调试和人机交互。
根据实际应用需求,用户可以选择合适的通讯方式进行配置。
此外,Modbus协议还规定了数据传输的格式。
在Modbus协议中,数据以16位的寄存器形式进行传输,主要包括保持寄存器、输入寄存器、线圈和离散输入等类型。
用户可以通过读取和写入这些寄存器来实现对设备的监控和控制,从而实现工业自动化和远程控制。
总的来说,Modbus协议是一种简单易用、灵活可靠的通讯协议,它在工业自动化领域有着广泛的应用。
通过本文的介绍,相信读者对Modbus协议已经有了更深入的了解,希望能够对读者在工业控制领域的应用实践提供一定的帮助。
最后,需要注意的是,在实际应用中,用户需要根据具体的设备和系统要求进行合理的配置和调试,以确保Modbus协议能够正常运行并达到预期的通讯效果。
同时,为了提高通讯的稳定性和安全性,用户还需要注意对通讯过程中可能出现的异常情况进行处理和防范。
希望本文能够为读者在Modbus协议的应用和实践中提供一定的参考和帮助。
ModbusMODBUSTCP协议解析教案
客户机的通信过程如下:
(1)用 Connect 命令建立与目标设备的连接;
(2)准备 Modbus 报文包括 7个字节的 MBAP 在
内的请求;
(3)使用 Send 命令发送报文;
(4)在同一连接下等待应答;
(5)用 Recv 命令读取报文, 完成一次数据交换过程。当通信任务结束时, 关
在第二种情况,TCP 连接管理完全不出现,用户应用仅需要 发送和接受MODBUS 报文。TCP 连接管理模块负责在需要时建 立新的TCP连接。
第29页/共36页
TCP连接的建立
Modbus报文传输服务必须在502端口上提供一个监听套 接字,允许接收新的连接和与其他设备交换数据。
当报文传输服务需要与远程服务器交换数据时,它必须 与远程502端口建立一个新的客户机连接,以便于远距 离地交换数据。本地端口必须高于1024,并且对每个客 户机的连接各不相同 。
目前中国已把Modbus TCP作为工业网络标准之一。在国 外,Modbus TCP被国际半导体业SEMI定为网络标准,国 际水处理、电力系统也把它作为应用的事实标准,还有 越来越多行业把Modbus TCP作为标准来用;
第34页/共36页
第35页/共36页
。 接管理,使用BSD套接字接口来管理TCP连接
第28页/共36页
TCP连接管理
MODBUS通信需要建立客户机与服务器之间的TCP连接。
连接的建立可以由用户应用模块直接实现,也可以由TCP连接 管理模块自动完成。
在第一种情况下,用户应用模块必须提供应用程序接口,以 便完全管理连接。这种方式为应用开发人员提供了灵活性, 但需要TCP/IP机制方面的专长。
在客户机和服务器的Modbus模块之间的通信需要使用 TCP连接管理模块,负责全面管理报文传输TCP连接。
ModbusProtocol
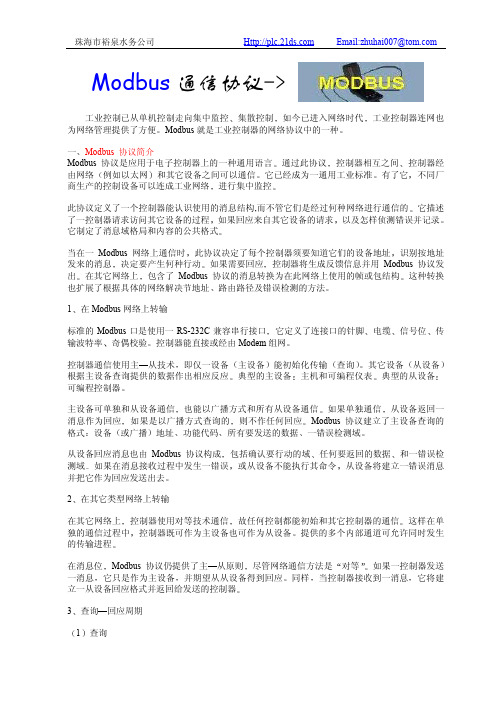
Modbus通信协议->工业控制已从单机控制走向集中监控集散控制如今已进入网络时代工业控制器连网也为网络管理提供了方便Modbus就是工业控制器的网络协议中的一种一M odbus 协议简介Modbus 协议是应用于电子控制器上的一种通用语言通过此协议控制器相互之间控制器经由网络例如以太网和其它设备之间可以通信它已经成为一通用工业标准有了它不同厂商生产的控制设备可以连成工业网络进行集中监控此协议定义了一个控制器能认识使用的消息结构,而不管它们是经过何种网络进行通信的它描述了一控制器请求访问其它设备的过程如果回应来自其它设备的请求以及怎样侦测错误并记录它制定了消息域格局和内容的公共格式当在一Modbus网络上通信时此协议决定了每个控制器须要知道它们的设备地址识别按地址发来的消息决定要产生何种行动如果需要回应控制器将生成反馈信息并用Modbus协议发出在其它网络上包含了Modbus协议的消息转换为在此网络上使用的帧或包结构这种转换也扩展了根据具体的网络解决节地址路由路径及错误检测的方法1在Modbus网络上转输标准的Modbus口是使用一RS-232C兼容串行接口它定义了连接口的针脚电缆信号位传输波特率奇偶校验控制器能直接或经由Modem组网控制器通信使用主从技术即仅一设备主设备能初始化传输查询其它设备从设备根据主设备查询提供的数据作出相应反应典型的主设备主机和可编程仪表典型的从设备可编程控制器主设备可单独和从设备通信也能以广播方式和所有从设备通信如果单独通信从设备返回一消息作为回应如果是以广播方式查询的则不作任何回应Modbus协议建立了主设备查询的格式设备或广播地址功能代码所有要发送的数据一错误检测域从设备回应消息也由Modbus协议构成包括确认要行动的域任何要返回的数据和一错误检测域如果在消息接收过程中发生一错误或从设备不能执行其命令从设备将建立一错误消息并把它作为回应发送出去2在其它类型网络上转输在其它网络上控制器使用对等技术通信故任何控制都能初始和其它控制器的通信这样在单独的通信过程中控制器既可作为主设备也可作为从设备提供的多个内部通道可允许同时发生的传输进程在消息位Modbus协议仍提供了主从原则尽管网络通信方法是对等如果一控制器发送一消息它只是作为主设备并期望从从设备得到回应同样当控制器接收到一消息它将建立一从设备回应格式并返回给发送的控制器3查询回应周期1查询查询消息中的功能代码告之被选中的从设备要执行何种功能数据段包含了从设备要执行功能的任何附加信息例如功能代码03是要求从设备读保持寄存器并返回它们的内容数据段必须包含要告之从设备的信息从何寄存器开始读及要读的寄存器数量错误检测域为从设备提供了一种验证消息内容是否正确的方法2回应如果从设备产生一正常的回应在回应消息中的功能代码是在查询消息中的功能代码的回应数据段包括了从设备收集的数据象寄存器值或状态如果有错误发生功能代码将被修改以用于指出回应消息是错误的同时数据段包含了描述此错误信息的代码错误检测域允许主设备确认消息内容是否可用图1 主-从查询-回应周期表二两种传输方式控制器能设置为两种传输模式ASCII或RTU中的任何一种在标准的Modbus网络通信用户选择想要的模式包括串口通信参数波特率校验方式等在配置每个控制器的时候在一个Modbus网络上的所有设备都必须选择相同的传输模式和串口参数ASCII模式RTU模式所选的ASCII或RTU方式仅适用于标准的Modbus网络它定义了在这些网络上连续传输的消息段的每一位以及决定怎样将信息打包成消息域和如何解码在其它网络上象MAP和Modbus Plus Modbus消息被转成与串行传输无关的帧1ASCII模式当控制器设为在Modbus网络上以ASCII美国标准信息交换代码模式通信在消息中的每个8Bit字节都作为两个ASCII字符发送这种方式的主要优点是字符发送的时间间隔可达到1秒而不产生错误代码系统十六进制ASCII字符0...9 A...F消息中的每个ASCII字符都是一个十六进制字符组成每个字节的位1个起始位7个数据位最小的有效位先发送1个奇偶校验位无校验则无1个停止位有校验时2个Bit无校验时错误检测域LRC(纵向冗长检测)2RTU模式当控制器设为在Modbus网络上以RTU远程终端单元模式通信在消息中的每个8Bit字节包含两个4Bit的十六进制字符这种方式的主要优点是在同样的波特率下可比ASCII方式传送更多的数据代码系统8位二进制十六进制数0...9 A...F消息中的每个8位域都是一个两个十六进制字符组成每个字节的位1个起始位8个数据位最小的有效位先发送1个奇偶校验位无校验则无1个停止位有校验时2个Bit无校验时错误检测域CRC(循环冗长检测)三Modbus消息帧两种传输模式中ASCII或RTU传输设备以将Modbus消息转为有起点和终点的帧这就允许接收的设备在消息起始处开始工作读地址分配信息判断哪一个设备被选中广播方式则传给所有设备判知何时信息已完成部分的消息也能侦测到并且错误能设置为返回结果1ASCII帧使用ASCII模式消息以冒号:字符ASCII码 3AH开始以回车换行符结束ASCII码0DH,0AH其它域可以使用的传输字符是十六进制的0...9,A...F网络上的设备不断侦测:”字符当有一个冒号接收到时每个设备都解码下个域地址域来判断是否发给自己的消息中字符间发送的时间间隔最长不能超过1秒否则接收的设备将认为传输错误一个典型消息帧如下所示图2 ASCII消息帧2RTU帧使用RTU模式消息发送至少要以3.5个字符时间的停顿间隔开始在网络波特率下多样的字符时间这是最容易实现的(如下图的T1-T2-T3-T4所示)传输的第一个域是设备地址可以使用的传输字符是十六进制的0...9,A...F网络设备不断侦测网络总线包括停顿间隔时间内当第一个域地址域接收到每个设备都进行解码以判断是否发往自己的在最后一个传输字符之后一个至少3.5个字符时间的停顿标定了消息的结束一个新的消息可在此停顿后开始整个消息帧必须作为一连续的流转输如果在帧完成之前有超过 1.5个字符时间的停顿时间接收设备将刷新不完整的消息并假定下一字节是一个新消息的地址域同样地如果一个新消息在小于 3.5个字符时间内接着前个消息开始接收的设备将认为它是前一消息的延续这将导致一个错误因为在最后的CRC域的值不可能是正确的一典型的消息帧如下所示图3 RTU消息帧3地址域消息帧的地址域包含两个字符ASCII或8Bit RTU可能的从设备地址是0...247 (十进制)单个设备的地址范围是 1...247主设备通过将要联络的从设备的地址放入消息中的地址域来选通从设备当从设备发送回应消息时它把自己的地址放入回应的地址域中以便主设备知道是哪一个设备作出回应地址0是用作广播地址以使所有的从设备都能认识当Modbus协议用于更高水准的网络广播可能不允许或以其它方式代替4如何处理功能域消息帧中的功能代码域包含了两个字符ASCII或8Bits RTU可能的代码范围是十进制的1...255当然有些代码是适用于所有控制器有此是应用于某种控制器还有些保留以备后用当消息从主设备发往从设备时功能代码域将告之从设备需要执行哪些行为例如去读取输入的开关状态读一组寄存器的数据内容读从设备的诊断状态允许调入记录校验在从设备中的程序等当从设备回应时它使用功能代码域来指示是正常回应(无误)还是有某种错误发生称作异议回应对正常回应从设备仅回应相应的功能代码对异议回应从设备返回一等同于正常代码的代码但最重要的位置为逻辑1例如一从主设备发往从设备的消息要求读一组保持寄存器将产生如下功能代码0 0 0 0 0 0 1 1 十六进制03H对正常回应从设备仅回应同样的功能代码对异议回应它返回1 0 0 0 0 0 1 1 十六进制83H除功能代码因异议错误作了修改外从设备将一独特的代码放到回应消息的数据域中这能告诉主设备发生了什么错误主设备应用程序得到异议的回应后典型的处理过程是重发消息或者诊断发给从设备的消息并报告给操作员5数据域数据域是由两个十六进制数集合构成的范围00...FF根据网络传输模式这可以是由一对ASCII 字符组成或由一RTU字符组成从主设备发给从设备消息的数据域包含附加的信息从设备必须用于进行执行由功能代码所定义的所为这包括了象不连续的寄存器地址要处理项的数目域中实际数据字节数例如如果主设备需要从设备读取一组保持寄存器功能代码03数据域指定了起始寄存器以及要读的寄存器数量如果主设备写一组从设备的寄存器功能代码10十六进制数据域则指明了要写的起始寄存器以及要写的寄存器数量数据域的数据字节数要写入寄存器的数据如果没有错误发生从从设备返回的数据域包含请求的数据如果有错误发生此域包含一异议代码主设备应用程序可以用来判断采取下一步行动在某种消息中数据域可以是不存在的0长度例如主设备要求从设备回应通信事件记录功能代码0B十六进制从设备不需任何附加的信息6错误检测域标准的Modbus网络有两种错误检测方法错误检测域的内容视所选的检测方法而定ASCII当选用ASCII模式作字符帧错误检测域包含两个ASCII字符这是使用LRC纵向冗长检测方法对消息内容计算得出的不包括开始的冒号符及回车换行符LRC字符附加在回车换行符前面RTU当选用RTU模式作字符帧错误检测域包含一16Bits值(用两个8位的字符来实现)错误检测域的内容是通过对消息内容进行循环冗长检测方法得出的CRC域附加在消息的最后添加时先是低字节然后是高字节故CRC的高位字节是发送消息的最后一个字节7字符的连续传输当消息在标准的Modbus系列网络传输时每个字符或字节以如下方式发送从左到右最低有效位...最高有效位使用ASCII字符帧时位的序列是使用RTU字符帧时位的序列是四错误检测方法标准的Modbus串行网络采用两种错误检测方法奇偶校验对每个字符都可用帧检测LRC或CRC应用于整个消息它们都是在消息发送前由主设备产生的从设备在接收过程中检测每个字符和整个消息帧用户要给主设备配置一预先定义的超时时间间隔这个时间间隔要足够长以使任何从设备都能作为正常反应如果从设备测到一传输错误消息将不会接收也不会向主设备作出回应这样超时事件将触发主设备来处理错误发往不存在的从设备的地址也会产生超时1奇偶校验用户可以配置控制器是奇或偶校验或无校验这将决定了每个字符中的奇偶校验位是如何设置的如果指定了奇或偶校验1”的位数将算到每个字符的位数中ASCII模式7个数据位RTU中8个数据位例如RTU字符帧中包含以下8个数据位1 1 0 0 0 1 0 1整个1”的数目是4个如果便用了偶校验帧的奇偶校验位将是0便得整个1”的个数仍是4个如果便用了奇校验帧的奇偶校验位将是1便得整个1”的个数是5个如果没有指定奇偶校验位传输时就没有校验位也不进行校验检测代替一附加的停止位填充至要传输的字符帧中2LRC检测使用ASCII模式消息包括了一基于LRC方法的错误检测域LRC域检测了消息域中除开始的冒号及结束的回车换行号外的内容LRC域是一个包含一个8位二进制值的字节LRC值由传输设备来计算并放到消息帧中接收设备在接收消息的过程中计算LRC并将它和接收到消息中LRC域中的值比较如果两值不等说明有错误LRC方法是将消息中的8Bit的字节连续累加丢弃了进位LRC简单函数如下static unsigned char LRC(auchMsg,usDataLen)unsigned char *auchMsg ; /* 要进行计算的消息 */unsigned short usDataLen ; /* LRC 要处理的字节的数量*/{ unsigned char uchLRC = 0 ; /* LRC 字节初始化 */while (usDataLen--) /* 传送消息 */uchLRC += *auchMsg++ ; /* 累加*/return ((unsigned char)(-((char_uchLRC))) ;}3CRC检测使用RTU模式消息包括了一基于CRC方法的错误检测域CRC域检测了整个消息的内容CRC域是两个字节包含一16位的二进制值它由传输设备计算后加入到消息中接收设备重新计算收到消息的CRC并与接收到的CRC域中的值比较如果两值不同则有误CRC是先调入一值是全1”的16位寄存器然后调用一过程将消息中连续的8位字节各当前寄存器中的值进行处理仅每个字符中的8Bit数据对CRC有效起始位和停止位以及奇偶校验位均无效CRC产生过程中每个8位字符都单独和寄存器内容相或OR结果向最低有效位方向移动最高有效位以0填充LSB被提取出来检测如果LSB为1寄存器单独和预置的值或一下如果LSB为0则不进行整个过程要重复8次在最后一位第8位完成后下一个8位字节又单独和寄存器的当前值相或最终寄存器中的值是消息中所有的字节都执行之后的CRC值CRC添加到消息中时低字节先加入然后高字节CRC简单函数如下unsigned short CRC16(puchMsg, usDataLen)unsigned char *puchMsg ; /* 要进行CRC校验的消息 */ unsigned short usDataLen ; /* 消息中字节数 */{unsigned char uchCRCHi = 0xFF ; /* 高CRC字节初始化 */ unsigned char uchCRCLo = 0xFF ; /* 低CRC 字节初始化 */ unsigned uIndex ; /* CRC循环中的索引 */while (usDataLen--) /* 传输消息缓冲区 */{uIndex = uchCRCHi ^ *puchMsgg++ ; /* 计算CRC */ uchCRCHi = uchCRCLo ^ auchCRCHi[uIndex} ; uchCRCLo = auchCRCLo[uIndex] ;}return (uchCRCHi << 8 | uchCRCLo) ;}/* CRC 高位字节值表 */static unsigned char auchCRCHi[] =0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0,0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40,0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1,0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40,0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0,0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40,0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0,0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40,0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0,0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0,0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0,0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40,0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1,0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0,0x80, 0x41, 0x00, 0xC1, 0x81, 0x40} ;/* CRC低位字节值表*/static char auchCRCLo[] =0x00, 0xC0, 0xC1, 0x01, 0xC3, 0x03, 0x02, 0xC2, 0xC6, 0x06,0x07, 0xC7, 0x05, 0xC5, 0xC4, 0x04, 0xCC, 0x0C, 0x0D, 0xCD, 0x0F, 0xCF, 0xCE, 0x0E, 0x0A, 0xCA, 0xCB, 0x0B, 0xC9, 0x09, 0x08, 0xC8, 0xD8, 0x18, 0x19, 0xD9, 0x1B, 0xDB, 0xDA, 0x1A, 0x1E, 0xDE, 0xDF, 0x1F, 0xDD, 0x1D, 0x1C, 0xDC, 0x14, 0xD4, 0xD5, 0x15, 0xD7, 0x17, 0x16, 0xD6, 0xD2, 0x12, 0x13, 0xD3, 0x11, 0xD1, 0xD0, 0x10, 0xF0, 0x30, 0x31, 0xF1, 0x33, 0xF3,0xF2, 0x32, 0x36, 0xF6, 0xF7, 0x37, 0xF5, 0x35, 0x34, 0xF4,0x3C, 0xFC, 0xFD, 0x3D, 0xFF, 0x3F, 0x3E, 0xFE, 0xFA, 0x3A,0x3B, 0xFB, 0x39, 0xF9, 0xF8, 0x38, 0x28, 0xE8, 0xE9, 0x29,0xEB, 0x2B, 0x2A, 0xEA, 0xEE, 0x2E, 0x2F, 0xEF, 0x2D, 0xED,0xEC, 0x2C, 0xE4, 0x24, 0x25, 0xE5, 0x27, 0xE7, 0xE6, 0x26,0x22, 0xE2, 0xE3, 0x23, 0xE1, 0x21, 0x20, 0xE0, 0xA0, 0x60,0x61, 0xA1, 0x63, 0xA3, 0xA2, 0x62, 0x66, 0xA6, 0xA7, 0x67,0xA5, 0x65, 0x64, 0xA4, 0x6C, 0xAC, 0xAD, 0x6D, 0xAF, 0x6F,0x6E, 0xAE, 0xAA, 0x6A, 0x6B, 0xAB, 0x69, 0xA9, 0xA8, 0x68,0x78, 0xB8, 0xB9, 0x79, 0xBB, 0x7B, 0x7A, 0xBA, 0xBE, 0x7E,0x7F, 0xBF, 0x7D, 0xBD, 0xBC, 0x7C, 0xB4, 0x74, 0x75, 0xB5,0x77, 0xB7, 0xB6, 0x76, 0x72, 0xB2, 0xB3, 0x73, 0xB1, 0x71,0x70, 0xB0, 0x50, 0x90, 0x91, 0x51, 0x93, 0x53, 0x52, 0x92,0x96, 0x56, 0x57, 0x97, 0x55, 0x95, 0x94, 0x54, 0x9C, 0x5C,0x5D, 0x9D, 0x5F, 0x9F, 0x9E, 0x5E, 0x5A, 0x9A, 0x9B, 0x5B,0x99, 0x59, 0x58, 0x98, 0x88, 0x48, 0x49, 0x89, 0x4B, 0x8B,0x8A, 0x4A, 0x4E, 0x8E, 0x8F, 0x4F, 0x8D, 0x4D, 0x4C, 0x8C,0x44, 0x84, 0x85, 0x45, 0x87, 0x47, 0x46, 0x86, 0x82, 0x42,0x43, 0x83, 0x41, 0x81, 0x80, 0x40} ;ModBus网络是一个工业通信系统由带智能终端的可编程序控制器和计算机通过公用线路或局部专用线路连接而成其系统结构既包括硬件亦包括软件它可应用于各种数据采集和过程监控下表1是ModBus的功能码定义表1 ModBus功能码01 READ COIL STATUS02 READ INPUT STATUS03 READ HOLDING REGISTER04 READ INPUT REGISTER05 WRITE SINGLE COIL06 WRITE SINGLE REGISTER15 WRITE MULTIPLE COIL16 WRITE MULTIPLE REGISTERModBus网络只是一个主机所有通信都由他发出网络可支持247个之多的远程从属控制器但实际所支持的从机数要由所用通信设备决定采用这个系统各PC可以和中心主机交换信息而不影响各PC执行本身的控制任务表2是ModBus各功能码对应的数据类型表2 Modbus功能与数据类型对应表1ModBus的传输方式在ModBus系统中有2种传输模式可选择这2种传输模式与从机PC通信的能力是同等的选择时应视所用ModBus主机而定每个ModBus系统只能使用一种模式不允许2种模式混用一种模式是ASCII美国信息交换码另一种模式是RTU远程终端设备这两种模式的定义见表3表3 ASCII和RTU传输模式的特性ASCII可打印字符便于故障检测而且对于用高级语言如Fortan编程的主计算机及主PC很适宜RTU则适用于机器语言编程的计算机和PC主机用RTU模式传输的数据是8位二进制字符如欲转换为ASCII模式则每个RTU字符首先应分为高位和低位两部分这两部分各含4位然后转换成十六进制等量值用以构成报文的ASCII 字符都是十六进制字符ASCII模式使用的字符虽是RTU模式的两倍但ASCII数据的译玛和处理更为容易一些此外用RTU模式时报文字符必须以连续数据流的形式传送用ASCII模式字符之间可产生长达1s的间隔以适应速度较快的机器2ModBus的数据校验方式CRC-16循环冗余错误校验CRC-16错误校验程序如下报文此处只涉及数据位不指起始位停止位和任选的奇偶校验位被看作是一个连续的二进制其最高有效位MSB首选发送报文先与X16相乘左移16位然后看X16+X15+X2+1除X16+X15+X2+1可以表示为二进制数11000000000000101整数商位忽略不记16位余数加入该报文MSB先发送成为2个CRC 校验字节余数中的1全部初始化以免所有的零成为一条报文被接收经上述处理而含有CRC 字节的报文若无错误到接收设备后再被同一多项式X16+X15+X2+1除会得到一个零余数接收设备核验这个CRC字节并将其与被传送的CRC比较全部运算以2为模无进位习惯于成串发送数据的设备会首选送出字符的最右位LSB-最低有效位而在生成CRC情况下发送首位应是被除数的最高有效位MSB由于在运算中不用进位为便于操作起见计算CRC时设MSB在最右位生成多项式的位序也必须反过来以保持一致多项式的MSB略去不记因其只对商有影响而不影响余数生成CRC-16校验字节的步骤如下装如一个16位寄存器所有数位均为1该16位寄存器的高位字节与开始8位字节进行异或运算运算结果放入这个16位寄存器把这个16寄存器向右移一位若向右标记位移出的数位是1则生成多项式1010000000000001和这个寄存器进行异或运算若向右移出的数位是0则返回重复和直至移出8位另外8位与该十六位寄存器进行异或运算重复~直至该报文所有字节均与16位寄存器进行异或运算并移位8次这个16位寄存器的内容即2字节CRC错误校验被加到报文的最高有效位另外在某些非ModBus通信协议中也经常使用CRC16作为校验手段而且产生了一些CRC16的变种他们是使用CRC16多项式X16+X15+X2+1单首次装入的16位寄存器为0000使用CRC16的反序X16+X14+X1+1首次装入寄存器值为0000或FFFFHLRC纵向冗余错误校验LRC错误校验用于ASCII模式这个错误校验是一个8位二进制数可作为2个ASCII十六进制字节传送把十六进制字符转换成二进制加上无循环进位的二进制字符和二进制补码结果生成LRC错误校验参见图这个LRC在接收设备进行核验并与被传送的LRC进行比较冒号回车符号CR换行字符LF和置入的其他任何非ASCII十六进制字符在运算时忽略不计--------------------------------------------------------------------------------版权所有(C) 1999 [珠海裕泉水务公司]保留所有权利修订日期 2003年05月12日。
modbus通讯协议 中文版
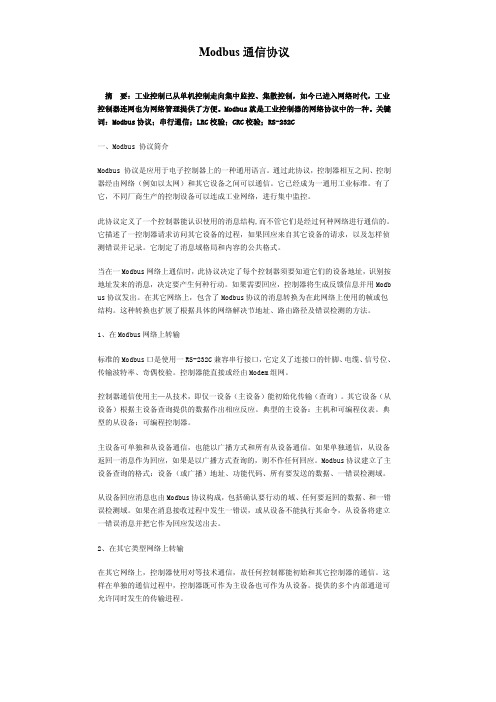
Modbus通信协议摘要:工业控制已从单机控制走向集中监控、集散控制,如今已进入网络时代,工业控制器连网也为网络管理提供了方便。
Modbus就是工业控制器的网络协议中的一种。
关键词:Modbus协议;串行通信;LRC校验;CRC校验;RS-232C一、Modbus协议简介Modbus协议是应用于电子控制器上的一种通用语言。
通过此协议,控制器相互之间、控制器经由网络(例如以太网)和其它设备之间可以通信。
它已经成为一通用工业标准。
有了它,不同厂商生产的控制设备可以连成工业网络,进行集中监控。
此协议定义了一个控制器能认识使用的消息结构,而不管它们是经过何种网络进行通信的。
它描述了一控制器请求访问其它设备的过程,如果回应来自其它设备的请求,以及怎样侦测错误并记录。
它制定了消息域格局和内容的公共格式。
当在一Modbus网络上通信时,此协议决定了每个控制器须要知道它们的设备地址,识别按地址发来的消息,决定要产生何种行动。
如果需要回应,控制器将生成反馈信息并用Modb us协议发出。
在其它网络上,包含了Modbus协议的消息转换为在此网络上使用的帧或包结构。
这种转换也扩展了根据具体的网络解决节地址、路由路径及错误检测的方法。
1、在Modbus网络上转输标准的Modbus口是使用一RS-232C兼容串行接口,它定义了连接口的针脚、电缆、信号位、传输波特率、奇偶校验。
控制器能直接或经由Modem组网。
控制器通信使用主—从技术,即仅一设备(主设备)能初始化传输(查询)。
其它设备(从设备)根据主设备查询提供的数据作出相应反应。
典型的主设备:主机和可编程仪表。
典型的从设备:可编程控制器。
主设备可单独和从设备通信,也能以广播方式和所有从设备通信。
如果单独通信,从设备返回一消息作为回应,如果是以广播方式查询的,则不作任何回应。
Modbus协议建立了主设备查询的格式:设备(或广播)地址、功能代码、所有要发送的数据、一错误检测域。
modbus 协议 英文版
modbus 协议英文版Modbus ProtocolModbus is a communication protocol commonly used in industrial automation systems. It was developed in 1979 by Modicon (now part of Schneider Electric) and has since become a de facto standard in the industry.The Modbus protocol is a master-slave protocol, where a master device (typically a PLC or a computer) requests data from or sends commands to one or more slave devices (such as sensors, actuators, or other controllers). It uses a simple and lightweight binary message structure that can be transmitted over various communication media, including serial connections (RS-232, RS-485) and Ethernet.The Modbus protocol defines several types of messages, including Read Holding Register, Write Holding Register, Read Input Register, and Write Multiple Registers. Each message consists of a function code and additional data specific to the function.In a typical Modbus communication sequence, the master device sends a request message to a slave device, specifying the function code and any necessary data. The slave device then processes the request and sends a response message back to the master device, containing the requested data or an acknowledgment of the command execution.Modbus supports multiple data types, including integers, floating-point numbers, and strings. It also provides features for errorchecking and data integrity, such as CRC (Cyclic Redundancy Check).The protocol has evolved over time, with various versions and extensions developed to meet the needs of different applications. The most widely used versions are Modbus RTU (Binary) and Modbus TCP/IP (Ethernet).Modbus has become a widely adopted protocol due to its simplicity, versatility, and compatibility with various devices and systems. It is used in a wide range of industrial automation applications, including manufacturing, energy management, building automation, and remote monitoring.。
Modbus协议中文版【完整版】
等待 MB 指示
[接收 MB 指示] 确认操作码 [无效的]
异常码_1
[有效的] 确认数据地址 [无效的]
异常码_2
[有效的] 确认数据值
异常码_3
[无效的] [有效的] 执行 MB 操作 [无效的]
异常码_4_5_6
发 送 Modbus 异常响应
[有效的] 发 送 Modbus 响应
图 8:MODBUS 事务处理的状态图 一旦服务器处理请求,使用合适的 MODBUS 服务器事务建立 MODBUS 响应。 根据处理结果,可以建立两种类型响应: l 一个正 MODBUS 响应: ● 响应功能码 = 请求功能码 l 一个 MODBUS 异常响应(参见第 6.14 节): l 用来为客户机提供处理过程中与被发现的差错相关的信息; l 响应功能码 = 请求功能码 + 0x80; l 提供一个异常码来指示差错原因。 5 功能码分类 有三类 MODBUS 功能码。它们是: 公共功能码 l 是较好地被定义的功能码, l 保证是唯一的, l MODBUS 组织可改变的, l 公开证明的, l 具有可用的一致性测试, l MB IETF RFC 中证明的,
127 110 100
公共功能码
用户定义功能码 公共功能码
72 65
用户定义功能码 公共功能码
1
图 9:MODBUS 功能码分类
9
GB/T ××××—××××
MODBUS 协议定义了一个与基础通信层无关的简单协议数据单元(PDU) 。特定总线或网络上 的 MODBUS 协议映射能够在应用数据单元(ADU)上引入一些附加域。
3
GB/T ××××—××××
ADU 地址域 功能码 PDU
图 3:通用 MODBUS 帧 启动 MODBUS 事务处理的客户机创建 MODBUS 应用数据单元。 功能码向服务器指示将执行哪 种操作。 MODBUS 协议建立了客户机启动的请求格式。 用一个字节编码 MODBUS 数据单元的功能码域。有效的码字范围是十进制 1-255(128-255 为 异常响应保留) 。当从客户机向服务器设备发送报文时,功能码域通知服务器执行哪种操作。 向一些功能码加入子功能码来定义多项操作。 从客户机向服务器设备发送的报文数据域包括附加信息,服务器使用这个信息执行功能码定义 的操作。这个域还包括离散项目和寄存器地址、处理的项目数量以及域中的实际数据字节数。 在某种请求中,数据域可以是不存在的(0 长度) ,在此情况下服务器不需要任何附加信息。功 能码仅说明操作。 如果在一个正确接收的 MODBUS ADU 中,不出现与请求 MODBUS 功能有关的差错,那么服 务器至客户机的响应数据域包括请求数据。如果出现与请求 MODBUS 功能有关的差错,那么域包 括一个异常码,服务器应用能够使用这个域确定下一个执行的操作。 例如, 客户机能够读一组离散量输出或输入的开/关状态, 或者客户机能够读/写一组寄存器的数 据内容。 当服务器对客户机响应时,它使用功能码域来指示正常(无差错)响应或者出现某种差错(称 为异常响应) 。对于一个正常响应来说,服务器仅对原始功能码响应。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
前 言-----------串行链路和TCP/IP 上的MODBUS 标准介绍该标准包括两个通信规程中使用的MODBUS 应用层协议和服务规范: ·串行链路上的MODBUSMODBUS 串行链路取决于TIA/EIA 标准:232-F 和485-A 。
·TCP/IP 上的MODBUSMODBUS TCP/IP 取决于IETF 标准:RFC793和RFC791有关。
串行链路和TCP/IP 上的MODBUS 是根据相应ISO 层模型说明的两个通信规程。
下图强调指出了该标准的主要部分。
绿色方框表示规范。
灰色方框表示已有的国际标准(TIA/EIA 和IETF 标准)。
MODBUS 报文传输在TCP/IP 上的实现指南 49页MODBUS 报文传输在串行链路上的实现指南 45页MODBUS 应用层在TCP/IP 上的MODBUS 映射TCPIETF RFC 793IPIETF RFC 791串行链路主站/从站以太网II/802.3 IEEE 802.2TIA/EIA-232-F TIA/EIA-485-A 以太网物理层Modbus 协议规范45页MODBUS 标准分为三部分。
第一部分(“Modbus 协议规范”)描述了MODBUS 事物处理。
第二部分(“MODBUS 报文传输在TCP/IP 上的实现指南”)提供了一个有助于开发者实现TCP/IP 上的MODBUS 应用层的参考信息。
第三部分(“MODBUS 报文传输在串行链路上的实现指南”)提供了一个有助于开发者实现串行链路上的MODBUS 应用层的参考信息。
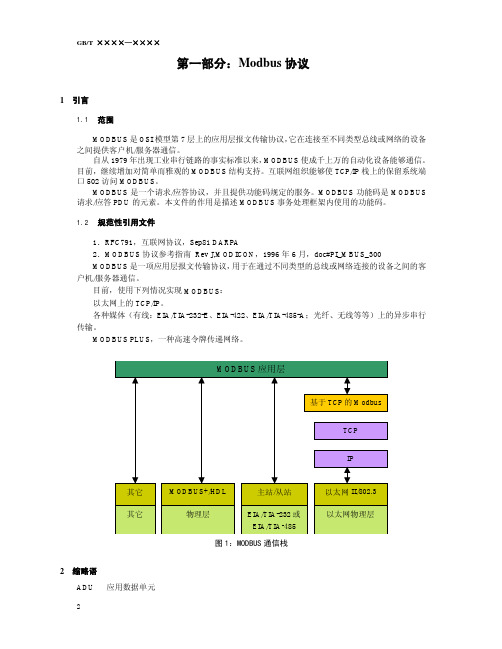
第一部分:Modbus协议第一部分:Modbus协议1 引言1.1 范围MODBUS是OSI模型第7层上的应用层报文传输协议,它在连接至不同类型总线或网络的设备之间提供客户机/服务器通信。
自从1979年出现工业串行链路的事实标准以来,MODBUS使成千上万的自动化设备能够通信。
目前,继续增加对简单而雅观的MODBUS结构支持。
互联网组织能够使TCP/IP栈上的保留系统端口502访问MODBUS。
MODBUS是一个请求/应答协议,并且提供功能码规定的服务。
MODBUS功能码是MODBUS 请求/应答PDU的元素。
本文件的作用是描述MODBUS事务处理框架内使用的功能码。
1.2 规范性引用文件1.RFC791,互联网协议,Sep81 DARPA2.MODBUS协议参考指南Rev J,MODICON,1996年6月,doc#PI_MBUS_300MODBUS是一项应用层报文传输协议,用于在通过不同类型的总线或网络连接的设备之间的客户机/服务器通信。
目前,使用下列情况实现MODBUS:以太网上的TCP/IP。
各种媒体(有线:EIA/TIA-232-E、EIA-422、EIA/TIA-485-A;光纤、无线等等)上的异步串行传输。
MODBUS PLUS,一种高速令牌传递网络。
MODBUS应用层基于TCP的ModbusTCPIP其它MODBUS+/HDL 主站/从站以太网II/802.3以太网物理层其它物理层EIA/TIA-232或EIA/TIA-485图1:MODBUS通信栈2 缩略语ADU 应用数据单元HDLC 高级数据链路控制 HMI 人机界面IETF 因特网工程工作组 I/O 输入/输出设备 IP 互连网协议 MAC 介质访问控制 MB MODBUS 协议 MBAP MODBUS 协议 PDU 协议数据单元 PLC 可编程逻辑控制器 TCP 传输控制协议 3 背景概要MODBUS 协议允许在各种网络体系结构内进行简单通信。
MODBUS ON MB+MODBUS ON RS232MODBUS ON RS485驱动器PLCHMII/OI/OI/OPLC驱动器PLC HMI I/O驱动器PLC I/O I/O 驱动器I/O网关网关网关MODBUS 通信MODBUS ON TCP/IP图2:MODBUS 网络体系结构的实例每种设备(PLC 、HMI 、控制面板、驱动程序、动作控制、输入/输出设备)都能使用MODBUS 协议来启动远程操作。
在基于串行链路和以太TCP/IP 网络的MODBUS 上可以进行相同通信。
一些网关允许在几种使用MODBUS 协议的总线或网络之间进行通信。
4 总体描述4.1 协议描述MODBUS 协议定义了一个与基础通信层无关的简单协议数据单元(PDU )。
特定总线或网络上的MODBUS 协议映射能够在应用数据单元(ADU )上引入一些附加域。
地址域功能码数据差错校验ADUPDU图3:通用MODBUS 帧启动MODBUS 事务处理的客户机创建MODBUS 应用数据单元。
功能码向服务器指示将执行哪种操作。
MODBUS 协议建立了客户机启动的请求格式。
用一个字节编码MODBUS 数据单元的功能码域。
有效的码字范围是十进制1-255(128-255为异常响应保留)。
当从客户机向服务器设备发送报文时,功能码域通知服务器执行哪种操作。
向一些功能码加入子功能码来定义多项操作。
从客户机向服务器设备发送的报文数据域包括附加信息,服务器使用这个信息执行功能码定义的操作。
这个域还包括离散项目和寄存器地址、处理的项目数量以及域中的实际数据字节数。
在某种请求中,数据域可以是不存在的(0长度),在此情况下服务器不需要任何附加信息。
功能码仅说明操作。
如果在一个正确接收的MODBUS ADU 中,不出现与请求MODBUS 功能有关的差错,那么服务器至客户机的响应数据域包括请求数据。
如果出现与请求MODBUS 功能有关的差错,那么域包括一个异常码,服务器应用能够使用这个域确定下一个执行的操作。
例如,客户机能够读一组离散量输出或输入的开/关状态,或者客户机能够读/写一组寄存器的数据内容。
当服务器对客户机响应时,它使用功能码域来指示正常(无差错)响应或者出现某种差错(称为异常响应)。
对于一个正常响应来说,服务器仅对原始功能码响应。
启动请求功能码 数据请求操作码接收响应数据响应执行操作启动响应客户机服务器图4:MODBUS 事务处理(无差错)对于异常响应,服务器返回一个与原始功能码等同的码,设置该原始功能码的最高有效位为逻辑1。
启动请求功能码 数据请求差错码接收响应异常码在操作中检测的差错 启动差错客户机 服务器图5 MODBUS 事务处理(异常响应)☞ 注释:需要管理超时,以便明确地等待可能不会出现的应答。
串行链路上第一个MODBUS 执行的长度约束限制了MODBUS PDU 大小(最大RS485ADU=256字节)。
因此,对串行链路通信来说,MODBUS PDU =256-服务器地址(1字节)-CRC (2字节)=253字节。
从而:RS232 / RS485 ADU = 253字节+服务器地址(1 byte) + CRC (2字节) = 256字节。
TCP MODBUS ADU = 249字节+ MBAP (7字节) = 256字节。
MODBUS 协议定义了三种PDU 。
它们是: ● MODBUS 请求PDU ,mb_req_pdu ● MODBUS 响应PDU ,mb_rsp_pdu● MODBUS 异常响应PDU ,mb_excep_rsp_pdu 定义mb_req_pdu 为:mb_req_pdu = { function_code, request_data},其中 function_code - [1个字节] MODBUS 功能码request_data - [n 个字节],这个域与功能码有关,并且通常包括诸如可变参考、变量、数据偏移量、子功能码等信息。
定义mb_rsp_pdu 为:mb_rsp_pdu = { function_code, response_ data},其中 function_code - [1个字节] MODBUS 功能码response_data - [n 个字节],这个域与功能码有关,并且通常包括诸如可变参考、变量、数据偏移量、子功能码等信息。
定义mb_excep_rsp_pdu 为:mb_excep_rsp_pdu = { function_code, request_data},其中 function_code - [1个字节] MODBUS 功能码 + 0x80exception_code - [1个字节],在下表中定义了MODBUS 异常码。
4.2 数据编码● MODBUS 使用一个‘big -Endian’ 表示地址和数据项。
这意味着当发射多个字节时,首先发送最高有效位。
例如: 寄存器大小 值16 –比特0x1234 发送的第一字节为0x12 然后0x34☞ 注释:更详细的信息参见[1]。
4.3 MODBUS数据模型MODBUS以一系列具有不同特征表格上的数据模型为基础。
四个基本表格为:基本表格对象类型访问类型内容离散量输入单个比特只读I/O系统提供这种类型数据线圈单个比特读写通过应用程序改变这种类型数据输入寄存器16-比特字只读I/O系统提供这种类型数据保持寄存器16-比特字读写通过应用程序改变这种类型数据输入与输出之间以及比特寻址的和字寻址的数据项之间的区别并没有暗示任何应用操作。
如果这是对可疑对象核心部分最自然的解释,那么这种区别是可完全接受的,而且很普通,以便认为四个表格全部覆盖了另外一个表格。
对于基本表格中任何一项,协议都允许单个地选择65536个数据项,而且设计那些项的读写操作可以越过多个连续数据项直到数据大小规格限制,这个数据大小规格限制与事务处理功能码有关。
很显然,必须将通过MODBUS处理的所有数据放置在设备应用存储器中。
但是,存储器的物理地址不应该与数据参考混淆。
要求仅仅是数据参考与物理地址的链接。
MODBUS功能码中使用的MODBUS逻辑参考数字是以0开始的无符号整数索引。
●MODBUS模型实现的实例下例实例示出了两种在设备中构造数据的方法。
可能有不同的结构,这个文件中没有全部描述出来。
每个设备根据其应用都有它自己的数据结构。
实例1:有4个独立块的设备下例实例示出了设备中的数据结构,这个设备含有数字量和模拟量、输入量和输出量。
由于不同块中的数据不相关,每个块是相互独立。
按不同MODBUS功能码访问每个块。
设备应用存储器MODBUS 访问MODBUS 服务器设备MODBUS 请求输入离散量 线圈输入寄存器 保存寄存器图6:带有独立块的MODBUS 数据模型实例2:仅有1个块的设备在这个实例中,设备仅有1个数据块。
通过几个MODBUS 功能码可能得到一个相同数据,或者通过16比特访问或1个访问比特。
设备应用存储器MODBUS 请求输入离散量线圈输入寄存器 保存寄存器MODBUS 服务器设备R R WWMODBUS 访问图7:仅带有1个块的MODBUS 数据模型4.4 MODBUS 事务处理的定义下列状态图描述了在服务器侧MODBUS 事务处理的一般处理过程。