LPC23XX的程序移植
LPC系列arm芯片
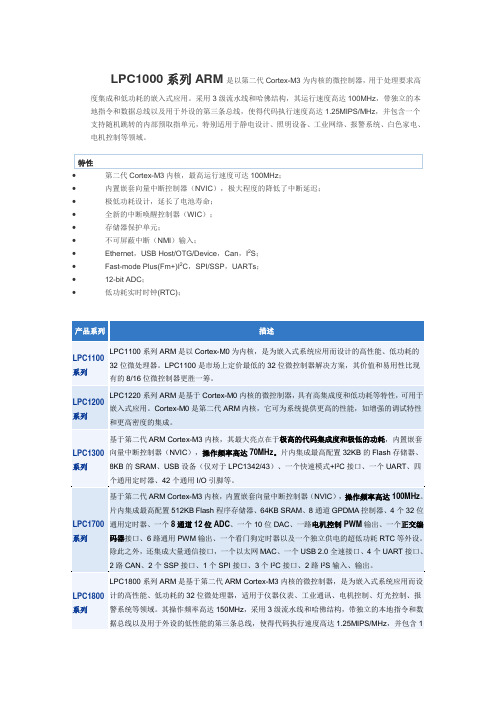
LPC1000系列ARM是以第二代Cortex-M3为内核的微控制器,用于处理要求高度集成和低功耗的嵌入式应用。
采用3级流水线和哈佛结构,其运行速度高达100MHz,带独立的本地指令和数据总线以及用于外设的第三条总线,使得代码执行速度高达1.25MIPS/MHz,并包含一个支持随机跳转的内部预取指单元,特别适用于静电设计、照明设备、工业网络、报警系统、白色家电、电机控制等领域。
特性•第二代Cortex-M3内核,最高运行速度可达100MHz;•内置嵌套向量中断控制器(NVIC),极大程度的降低了中断延迟;•极低功耗设计,延长了电池寿命;•全新的中断唤醒控制器(WIC);•存储器保护单元;•不可屏蔽中断(NMI)输入;•Ethernet,USB Host/OTG/Device,Can,I2S;•Fast-mode Plus(Fm+)I2C,SPI/SSP,UARTs;•12-bit ADC;•低功耗实时时钟(RTC);LPC1100L系列ARM采用Cortex-M0内核,是市场上定价最低的32位MCU解决方案,它的价值和易用性比现有的8位/16位微控制器更胜一筹。
LPC1100L系列ARM性能卓越、简单易用、功耗低,更重要的是,它能显著降低所有8位/16位应用的代码长度。
LPC1100L系列为那些寻求用可扩展ARM架构来执行整个产品开发过程的8位/16位用户提供无缝的整合需求。
这些MCU围绕着新的Cortex-M0架构建立,是开发以来最小巧、功耗最低且最有能效的ARM内核,为电池供电的消费类产品、智能电表、电机控制等应用提供理想的解决方案。
LPC1100L系列ARM每秒4500多万条指令的傲人性能让8位(每秒不到100万条指令)及16位(每秒300万到500万条指令)微控制器相形见绌;LPC1100L不仅能执行基本的控制任务,而且能进行复杂运算,即便最复杂的任务也能轻松应付。
执行效率的提高直接转化为能耗的降低,实现该性能水平的LPC1100L运行速度高达50MHz,其功耗也得到了很大程度的优化——仅需不到10mA的电流。
cortex-m23 汇编指令

文章主题:深度解析Cortex-M23汇编指令1. 前言在嵌入式系统中,Cortex-M23处理器是一种常见的微控制器核心。
其汇编指令集对于嵌入式开发非常重要,因此本文将深入探讨Cortex-M23汇编指令的相关知识。
2. Cortex-M23简介Cortex-M23是ARM旗下针对低功耗、对安全性要求较高的嵌入式应用而设计的处理器核心。
其指令集对嵌入式系统的性能和功耗起着关键作用。
3. 汇编指令的基本概念汇编指令是机器语言的助记符,是一种低级别的程序设计语言。
了解汇编指令的基本概念对理解Cortex-M23的汇编指令非常重要。
4. Cortex-M23的指令集架构Cortex-M23的指令集架构是非常精简且高效的,包括基本指令、扩展指令和特权指令等部分,这些指令的灵活运用对于优化代码效率有着重要的意义。
5. 常用的Cortex-M23汇编指令在嵌入式开发中,一些常用的Cortex-M23汇编指令如加载存储指令、分支跳转指令、逻辑运算指令等都是必须掌握的内容。
6. 汇编指令的应用场景汇编指令在嵌入式系统的应用场景非常广泛,包括中断处理、设备驱动程序、嵌入式操作系统等,了解其应用场景有助于更好地理解汇编指令的作用与价值。
7. 个人见解与结语通过对Cortex-M23汇编指令的深入探讨,我对其在嵌入式系统中的重要性有了更深入的理解,同时也认识到了其对系统性能和功耗的影响。
对于嵌入式开发者来说,熟练掌握Cortex-M23汇编指令将极大地提高开发效率,同时也有助于优化系统性能。
结语:通过本文的阐述,相信您对Cortex-M23汇编指令有了更加全面、深刻和灵活的理解。
希望本文能为您在嵌入式开发领域的学习和工作带来一些启发与帮助。
8. Cortex-M23汇编指令的优化和性能提升在嵌入式系统中,优化Cortex-M23汇编指令的编程方式可以极大地提高系统性能。
通过合理选择指令和编写高效的汇编代码,可以减少系统的功耗和延迟,从而提高系统的响应速度和效率。
scatter分析

;执行域包含1个或多个输入段
;输入段书写格式:包括模块描述和段描述
;
;模块描述:指定包含模块的文件(包括目标文件.o和库文件.LIB)搜索范围,可以使用通配符*和?
问题分析:
分散加载描述文件是一个文本文件,它向链接器描述目标系统的存储器映射。如果通过命令行使用链接器,则描述文件的扩展名并不重要。分散加载文件指定:
1)每个加载区的加载地址和最大尺寸;
2)每个加载区的属性;
3)从每个加载区派生的执行区;
4)每个执行区的执行地址和最大尺寸;
5)每个执行区的输入节。
{
*(+RW) ; RW被紧接着放置,不能移动
}
ER_ZI +0 ; ER_ZI执行域在ER_RW执行域后面
{
*(+ZI) ; 所有ZI段被连续放置
}
}
在上面的例程中, 代码从地址0x00000000处开始存放,并且将RESET程序段放在最开始处, 而可读写的数据从地址0x30000000处开始存放. 分散加载文件的段的名字(例如LR_ROM1, ER_ROM1等)可以是任意的名字。
ADS分散加载文件语法:
;如果片外RAM起始地址不为0x8000 0000,则需要修改mem_.scf文件
{
* (+RW,+ZI)
}
HEAP +0 UNINIT ;+0表示接着上一段,UNINIT 表示不初始化
; OVERLAY:覆盖,允许加载域互相重叠,可以在相同地址上建立多个执行域,ADS不支持本属性
十大热门微处理器

新鲜出炉十大热门微处理器作为一个曾在在电子行业摸爬滚打、满是尘土满是汗的“老鸟”来说,被玩的飞转的MCU那是很久以前的事了。
微处理器说白了就是处理事情的机器,就像人的大脑一样属于一切行为命令的发布中心。
纵观电子行业,微处理器发展尤为迅猛,再加上电子产品的不断更新如:笔记本、平板、智能手机等等。
或许是电子行业的飞速发展让我突然有想坐下来歇歇脚的愿望,一直是行业推着我们向前,不如说是我们推动了电子行业的进步。
下面根据“老鸟”我的收藏及一些经历为大家带来电子行业中新鲜出锅的十款微处理器。
NO.1:AT89C51火热度:✩✩✩✩✩月搜索量:1448次当仁不让NO.1是个人认为专业生产微处理器厂商之一的Atmel。
这是一种低功耗,高性能8位4K字节闪存微控制器。
是采用高密度非易失性内存技术并与业界标准MCS-51TM 指令集和引脚兼容。
这款是Atmel一款比较经典的MCU,或许是由于年纪较大,慢慢被一些功能更强大的兄弟姐妹们所超越了,但这仍是一款最热的MCU!主要特点和优势:1、兼容MCS-51TM产品2、1,000写/擦除周期3、全静态操作(可替代型号)NO.2月搜索量:1090次大家族的一员,MSP430家族是一种特低功耗的混合信号微控制器,这些微控制器被设计成可用电池工作且可应用很长时间的器件。
对小德我个人还是非常崇拜的,感觉它的技术总是走在行业的前段。
主要特点和优势:1、低电源电压范围:1.8~3.6V2、特低功耗、低工作电流3、由等待方式到唤醒时间只要6µs (可替代型号)NO.3:STM32F103RBT6火热度:✩✩✩✩✩月搜索量:1160次这款微处理器不知道大伙玩过没,我们当时玩的那是风生水起啊,话说又是经典的一款,由公认的半导体行业最具创新力之一的公司生产,大家知道是哪个公司吧~~这款MCU采用高性能的ARM的RISC内核,在72 MHz的频率下工作,内置高速存储器,很棒!主要特点和优势:1、ARM的32位Cortex™-M3处理器内核2、多达9通信接口3、低功耗,多达80个快速I/ O端口(可替代型号)火热度:✩✩✩✩月搜索量:1121次MCU是AT89C51的升级版,同样拥有低功耗,高性能CMOS8位单片机的ISP闪存4KB。
LPC23xx多通道ADC BURST模式

LPC23xx多通道ADC BURST扫描模式主要的配置详细见下面的程序,有要工程的同志请找我!#include"config.h"/*****************************************************************************/ #define CE(1<<16)#define CN(1<<15)uint32ADC_Data4=0;uint32ADC_Data5=0;extern uint32GPRS_Overtime;float R=820.0;float I=0.0;char V[20]={0};char I0[20]={0};char s[20];void BMS(void);void ADCInit(void);extern void LedInit(void);extern void Time1Init(void);extern void Uart3Init(uint32bps);extern void DelayMs(uint32delay_value);extern void Uart3PutString(uint8*Data,uint16NByte);/******************************************************************** Function:mainDescription:主函数Calls:Input:无Output:无********************************************************************/int main(void){IRQEnable();Uart3Init(115200);//串口3初始化为8位数据位,1位停止位,无奇偶校验Time1Init();LedInit();DelayMs(1);ADCInit();while(1){IO1CLR=USL_LED;DelayMs(200);IO1SET=USL_LED;BMS();}return(0);}void ADCInit(void){IO1DIR=IO1DIR&(~(1<<15));/*p1.15充电管脚配置*/IO1DIR=IO1DIR|(1<<16);/*p1.16充电管脚使能*/PCONP|=1<<12;//必须打开ADC的功率控制位ADC才可以正常工作PINSEL3=(PINSEL3|(1ul<<29)|(1ul<<28));//设置P1.30为AIN4功能PINSEL3=(PINSEL3|(1ul<<31)|(1ul<<30));//设置P1.31为AIN5功能/*进行ADC模块设置*/AD0CR=(1<<4)|//SEL=0x10,选择通道4(1<<5)|//SEL=0x20,选择通道5((Fpclk/1000000-1)<<8)|//CLKDIV=Fpclk/1000000-1,转换时钟为1MHz(1<<16)|//BURST=1,使用Burst模式,让硬件不断地进行转换(0<<17)|//CLKS=0,使用11clock转换(0<<18)|(0<<19)|(1<<21)|//PDN=1,正常工作模式(0<<24)|//START=0,在Burst模式下,起始位(bit24~26)必须为0(0<<25)|(0<<26);DelayMs(10);ADC_Data4=ADDR4;ADC_Data5=ADDR5;//读取ADC结果,并清除DONE标志位}void BMS(void){AD0CR=AD0CR&(~(1<<26)&(~(1<<25))&(~(1<<24)));/*进行第一次转换*/while((AD0STAT&0x30)==0);/*等待第四、五通道AIN4、AIN5转换结束*/ADC_Data4=ADDR4;/*读取ADC结果*/ADC_Data5=ADDR5;/*读取ADC结果*/DelayMs(1);AD0CR=AD0CR&(~(1<<26)&(~(1<<25))&(~(1<<24)));/*再次启动转换*/while((AD0STAT&0x30)==0);//*等待第四、五通道AIN4、AIN5转换结束*/ADC_Data4=ADDR4;/*读取ADC结果*/ADC_Data5=ADDR5;/*读取ADC结果*/ADC_Data4=(ADC_Data4>>6)&0x3FF;ADC_Data4=ADC_Data4*3300;/*参考电压由精密恒压源提供的3.3V*/ ADC_Data4=(ADC_Data4/1024);I=ADC_Data4/R;ADC_Data5=(ADC_Data5>>6)&0x3FF;ADC_Data5=ADC_Data5*3300;/*参考电压由精密恒压源提供的3.3V*/ADC_Data5=(ADC_Data5/1024);/*1024为10位ADC,即210=1024。
ia-32处理器的条件转移指令

IA-32处理器是Intel推出的一系列32位处理器架构,它在计算机硬件中起着至关重要的作用。
IA-32处理器的条件转移指令是其中一个重要的组成部分,它们为计算机程序的流程控制提供了必要的支持。
本文将重点介绍IA-32处理器的条件转移指令,包括其功能、操作方法以及相关注意事项。
一、IA-32处理器的条件转移指令概述条件转移指令是一类用于根据特定条件改变程序执行流程的指令,它们根据条件标志寄存器的状态来决定是否执行跳转。
在IA-32处理器中,条件转移指令通常以"J"开头,后跟特定的条件代码,比如JE (Jump if Equal)、JNE(Jump if Not Equal)等。
这些条件代码根据不同的情况来判断是否进行跳转,从而实现程序流程的灵活控制。
二、IA-32处理器条件转移指令的功能IA-32处理器的条件转移指令主要用于实现程序中的条件分支结构,使程序可以根据不同的条件选择不同的执行路径。
它们可以用于实现循环结构、条件判断、函数调用等,是程序中不可或缺的重要部分。
通过条件转移指令,程序可以实现复杂的逻辑判断和控制流程,从而实现各种不同的功能和算法。
三、IA-32处理器条件转移指令的操作方法条件转移指令的操作方法相对简单直接,它们通常涉及到两个部分:条件判断和跳转目标。
条件判断部分会根据条件标志寄存器(如ZF、SF、CF等)的状态来确定是否满足跳转条件。
根据条件判断的结果,程序将会跳转到特定的跳转目标位置区域执行相应的指令。
在汇编语言中,条件转移指令的语法通常如下:```JE label ; 如果相等则跳转到标号label处执行JNE label ; 如果不相等则跳转到标号label处执行JZ label ; 如果为零则跳转到标号label处执行JG label ; 如果大于则跳转到标号label处执行JMP label ; 无条件跳转到标号label处执行```通过这些简单的指令的组合,程序可以实现复杂的条件控制和跳转逻辑。
(完整版)LPC23XXCAN全局验收滤波器设置说明

/*在标准的LPC236x.H文件中添加的RAM#define */#define CAN_MEM_BASE 0xE0038000#define CAN_SFF_RAM (*(volatile unsigned long *)(CAN_MEM_BASE + 0x00))#define CAN_SFF_GRP_RAM (*(volatile unsigned long *)(CAN_MEM_BASE + 0x04))#define CAN_EFF_RAM (*(volatile unsigned long *)(CAN_MEM_BASE + 0x08))#define CAN_EFF_GRP_RAMS (*(volatile unsigned long *)(CAN_MEM_BASE + 0x0C))#define CAN_EFF_GRP_RAME (*(volatile unsigned long *)(CAN_MEM_BASE + 0x10))/*该初始化配置的滤波器,可接受单个标准帧:0x300可接受标准帧组:0x400-0x430可接受单个扩展帧:0x00000300可接受扩展帧组:0x00000400-0x00000430*/void CAN_Init( uint32 can_btr ){PCONP |= (1 << 13); // Enable clock to the peripheralPINSEL0 &= ~0x0000000F;PINSEL0 |= 0x0000005; // port0.0~1, function 0x01, port0.4~5, function 0x10CAN1MOD = 1; // Reset CANCAN1IER = 0; // Disable Receive InterruptCAN1GSR = 0; // Reset error counter when CANxMOD is in resetCAN1BTR = can_btr;CAN1MOD = 0x0; // CAN in normal operation modeInstall_IRQ(CAN_INT,(void *)CAN_Handler,HIGHEST_PRIORITY);CAN1IER |= 0x81; // Enable receive interrupts,Enable Bus error interruptsCAN_AFMR = ACCF_OFF ;//只能在验收滤波器旁路模式或验收滤波器关闭模式才能写查找表的区配置寄存器。
周立功lpc21xxlpc22xx系列ARM7启动代码分析 免费下载
from:/116243391.html网上已经有人做了一个周立功lpc2000(ARM7TDMI)启动代码分析的文章,我本来想做一个s3c2410(ARM920T)的启动代码分析的, 但是看来了一下2410的启动代码,发现有些东西还不是理解的很清楚, 我ARM9的经验比较少.ARM7的启动代码分析网上那一份相比,我这个主要关注startup.s文件.网上那个startup.s几乎是一笔带过的.红色标记的是源码.SVC_STACK_LEGTH EQU 0FIQ_STACK_LEGTH EQU 0IRQ_STACK_LEGTH EQU 256ABT_STACK_LEGTH EQU 0UND_STACK_LEGTH EQU 0NoInt EQU 0x80USR32Mode EQU 0x10SVC32Mode EQU 0x13SYS32Mode EQU 0x1fIRQ32Mode EQU 0x12FIQ32Mode EQU 0x11上面几行代码,不用过多分析, 定义几个符号而已, 把EQU想像成C中的#define就可以了. 具体定义的数值,下面的代码用到我再解释.IMPORT __use_no_semihosting_swi上面这一句的作用是在代码中禁用 semihosting 机制. 到底什么是semihostiong这里不多说, 网上有很多. 这里只说明Semihosting主要用来调试, 在release版本的代码中一般是要禁用的.IMPORT FIQ_ExceptionIMPORT __mainIMPORT TargetResetInit上面三行是把要引入的外部标号声明一下,以便下面使用.EXPORT bottom_of_heapEXPORT StackUsrEXPORT ResetEXPORT __user_initial_stackheap上面四行是把要给其它文件使用的标号声明AREA vectors,CODE,READONLYENTRY上面这一行声明汇编文件的入口, 整个文件是从这里开始执行的.ResetLDR PC, ResetAddrLDR PC, UndefinedAddrLDR PC, SWI_AddrLDR PC, PrefetchAddrLDR PC, DataAbortAddrDCD 0xb9205f80LDR PC, [PC, #-0xff0]LDR PC, FIQ_Addr上面几行是配置中断向量表. 中断向量表的顺序是不能变的,因为这是ARM7规定的,可以参考相关书籍. 这里有几个问题要说明一下.第一, 关于DCD 0xb9205f80, 按照ARM7的中断向量表分布图, 这个位置是个保留位. 但是究竟为什么要用0xb9205f80这个数值呢.根据周立功的说法, nxp系列的lpc21xx,lpc22xx片子要求"中断向量表中所有数据32位累加和为0,否则程序不能脱机运行", 我在AXD反汇编了一下(如下图),把中断向量表中的8个机器码累加了一下:0xe59ff018*6+0xe51ffff0+0xb9205f80,没错, 结果是零. 但是我遇到一个问题, 就是我在实验中,把0xb9205f80这个数值改成任何值,程序运行都没问题. 头大了, 这个问题待解决中……(希望高手看到了可以指点一二).第二, 关于LDR PC, [PC, #-0xff0]. 这里本应该放IRQ中断的, 为什么是这么一句话. 其实在我blog的其中一篇文章里有提到过这一点.ARM7的三级流水线结构导致了PC指向的是当前指令的后8个字节. 本来IRQ是应该放在0x00000018处的. LDR PC, [PC, #-0xff0]这条语句执行后, PC的当前值就是0x00000018+8-0xff0. 很容易计算出它的结果是0xfffff030. 看一下lpc22xx的手册就知道. 这个地址就是VICVectAddr. 也就是说本来这个地址是应该放IRQ服务程序的入口地址的,但是这个地址被放在了VICVectAddr 这个寄存器里. 英文手册里有一段对VICVectAddr 描述. 看了之后就容易明白是怎么回事了: Vector Address Register. When an IRQ interrupt occurs, the IRQ service routine can read this register and jump to the value readResetAddr DCD ResetInitUndefinedAddr DCD UndefinedSWI_Addr DCD SoftwareInterruptPrefetchAddr DCD PrefetchAbortDataAbortAddr DCD DataAbortNouse DCD 0IRQ_Addr DCD 0FIQ_Addr DCD FIQ_Handler这几行是为上面中断向量表中的中断标号分配内存空间, 也就是它们的执行地址. 一开始我有个疑问, 为什么不直接用LDR PC, ResetInit,还要用DCD中转一下, 后来上网查了一下,才恍然大悟, ldr指令中的地址必须为当前指令地址是4KB范围内, 用DCD中转一下就可以在整个程序空间寻址.UndefinedB UndefinedSoftwareInterruptB SoftwareInterruptPrefetchAbortB PrefetchAbortDataAbortB DataAbortFIQ_HandlerSTMFD SP!, {R0-R3, LR}BL FIQ_ExceptionLDMFD SP!, {R0-R3, LR}SUBS PC, LR, #4这几行不用过多解释, 只是说明上面几个异常如何执行.InitStackMOV R0, LR;设置管理模式堆栈MSR CPSR_c, #0xd3LDR SP, StackSvc;设置中断模式堆栈MSR CPSR_c, #0xd2LDR SP, StackIrq;设置快速中断模式堆栈MSR CPSR_c, #0xd1LDR SP, StackFiq;设置中止模式堆栈MSR CPSR_c, #0xd7LDR SP, StackAbt;设置未定义模式堆栈MSR CPSR_c, #0xdbLDR SP, StackUnd;设置系统模式堆栈MSR CPSR_c, #0xdfLDR SP, =StackUsrMOV PC, R0上面是一个子函数, 函数名为InitStack. 顾名思意, 这个函数设置ARM七种工作模式下的堆栈. 关于这一段代码有三点要说.第一, MSR CPSR_c, #0xdf, 这一句把ARM的工作模式设置为系统模式,或者也可以说是用户模式, 因为系统模式与用户模式是共享相同的寄存器组. 用0xdf对CPSR寄存器赋值,就把IRQ中断关闭了(可以查一下CRSR的详细说明), 代码正常执行时处理器是处在用户模式的,所以IRQ中断是不会执行的. 所以,如果用周立功的这个启动代码,当你的程序中需要中断时,要把0xdf改成0x5f. 之前看到很多人在网上说用周立功的ADS工程模板,进不了中断,很多情况下是这个原因.第二, 并不是每一种模式下的堆栈都用设置的, 比如说如果你的程序中不会用到FIQ,就可以不用设置快速中断下的堆栈.第三, 注意LDR SP, =StackUsr这个语句, 其它都是没有=号的, 为什么这个要用等号呢? 这就是LDR伪指令与LDR指令的区别了, LDR SP, =StackUsr是把StackUsr表示的地址装载到sp, LDR SP, StackUnd是把StackUnd表示地址的内容装载到sp,注意下面几句StackSvc DCD SvcStackSpace + (SVC_STACK_LEGTH - 1)* 4StackIrq DCD IrqStackSpace + (IRQ_STACK_LEGTH - 1)* 4StackFiq DCD FiqStackSpace + (FIQ_STACK_LEGTH - 1)* 4StackAbt DCD AbtStackSpace + (ABT_STACK_LEGTH - 1)* 4StackUnd DCD UndtStackSpace + (UND_STACK_LEGTH - 1)* 4可以看到,没有”=”的标号都已经用DCD初始化了, 而StackUsr到底是什么呢, 它是由下面的语句决定的(startup.s文件)AREA Stacks, DATA, NOINITStackUsr(分散加载文件)STACKS 0x40002000 UNINIT{Startup.o (Stacks)}这样就明白了, StackUsr肯定是0x40000000~0x400020000之间的某个数. 用户模式下的堆栈空间就是它了.ResetInitBL InitStackBL TargetResetInitB __main处理器上电复位后通过中断向量表进入该函数,__main函数主要工作是初始化C的库函数, 并由它进入C的main函数.__user_initial_stackheapLDR r0,=bottom_of_heap; LDR r1,=StackUsrMOV pc,lr__user_initial_stackheap函数是ADS的一个库函数, 如果程序中用到的分散加载文件, 这个函数必须要被实现. 应用程序的栈和heap是在C库函数初始化过程中建立起来的。
LPC开发板简介

LPC1700特性:
EM-LPC1768开发板:
EM-LPC1768硬件资源: :
LPC1768软件资源:
LPC2400简介:
LPC2400系列ARM一款具有极高集成度并且以ARM7TDMI-S为内核的 微控制器,支持支持实时仿真和嵌入式跟踪,处理器时钟高达72MHz。
片内集成:支持STN和TFT显示的LCD控制器、10/100M以太网媒体访问 控制器(MAC)、USB 2.0全速Device/Host/OTG控制器、4个UART,2路 CAN-bus、1个SPI接口、2个SSP接口、3个I2C CAN-bus 1 SPI 2 SSP 3 I C接口和1个I2S 1 I S接口。同时还带 有1个片内4MHz内部振荡器、98KB RAM以及1个支持异步静态存储器设备 和动态存储器的外部存储器控制器(EMC)。此外,还带有多个32位定时器、 ADC、DAC、PWM。
EM-LPC2400开发板(LPC2478)
LPC2478是NXP半导体公司针对各种高级通讯、高质 量图像显示等广泛应用场合而设计的一款具有极高集 成度并且以ARM7TDMI-S为内核的微控制器。 LPC2478微控制器具有512kB片内高速Flash存储器, 该Flash存储器具有特殊的128位宽度的存储器接口和 加速器架构,可使CPU以高达72MHz的系统时钟速度 来按顺序执行Flash存储器的指令。这种特点只有 LPC2000 ARM微控制器系列的产品才能提供。 LPC2478还带有实时调试接口,包括JTAG和嵌入式 跟踪在内,可以执行32位的ARM指令和16位的 THUMB指令。
LPC2478硬件资源 硬件资源
CPU:LPC2478(NXP),ARM7TDMI-S : , 512K内部 内部Flash 内部 98K的内部 的内部SRAM 的内部 128MB外部 外部NandFlash(K9F1G08) 外部 ( ) 32M的外部 的外部SDRAM 的外部 2MB的外部 的外部NorFlash 的外部 两个RS232接口,一个三线,一个五线 接口,一个三线, 两个 接口 USB2.0规范,带联接状态指示灯 一个 规范, 一个USB HOST 规范 带联接状态指示灯,一个 接口, 一个USB OTG接口。 接口 一个 接口。 接口 支持TFT(5:6:5)LCD接口,带Buffer芯片 接口, 支持 接口 芯片 (74HC244)驱动 ) 支持两路CAN总线 支持两路 总线 一个 SD/MMC卡接口 卡接口 采用音频解码芯片HT28V31,可直接播放音乐。 ,可直接播放音乐。 采用音频解码芯片 一个复位按键,并采用专用复位芯片进行复位, 一个复位按键,并采用专用复位芯片进行复位,稳 定可靠 一个20芯 - 标准JTAG接口,支持 接口, 一个 芯Multi-ICE标准 标准 接口 支持MDK等 等 调试 5V直流电源输入,带电源指示灯 也可 直流电源输入, 也可USB直接供 直流电源输入 带电源指示灯,也可 直接供 电 四个小按键,八个高亮 四个小按键,八个高亮LED93个I/O扩展插槽 个 扩展插槽 一个蜂鸣器 外部总线扩展槽, 外部总线扩展槽,电源和地线等 一个10M/100M网络接口 网络接口 一个
LCD1602字符液晶LPC2368操作

#include<lpc23xx.h>#define CS1 1<<22 //左边屏片选#define CS2 1<<20 //右边屏片选#define EN 1<<21 //数据或控制字的选择//液晶屏的端口初始化PINSEL4 = PINSEL4&0xFFFCFFFF; //P2.8数字口,FIO2DIR = FIO2DIR|0X00000100; //P2.8输出口//DelayNSL(1500); //延时1msvoid DelayNSL(unsigned long dly){unsigned long i;for (i = 0; i < dly; i++);}//************************************************************************************ **********************//** 函数名称:DelayNS()//** 入口参数:dly 延时参数,值越大,延时越久//** 出口参数:无//************************************************************************************ *********************//DelayNS(15); //延时10msvoid DelayNS (unsigned long dly){unsigned long i;for ( ; dly>0; dly--)for (i=0; i<5000; i++);}void C lrLCD(void) //液晶屏的清零和初始化{unsigned char i,j;FIO0CLR=EN;FIO0SET=CS1|CS2;FIO2PIN = (FIO2PIN & 0xffffff00) +0xa9;//占空比1/32delay(5);FIO0CLR=CS1|CS2;delay(2);FIO0SET=CS1|CS2;FIO2PIN = (FIO2PIN & 0xffffff00) + 0xa0;//右向输出delay(5);FIO0CLR=CS1|CS2;delay(2);FIO0SET=CS1|CS2;FIO2PIN = (FIO2PIN & 0xffffff00) + 0xee;// y addr + 1 delay(5);FIO0CLR=CS1|CS2;delay(2);FIO0SET=CS1|CS2;FIO2PIN = (FIO2PIN & 0xffffff00) + 0 ;//列地址delay(2);FIO0CLR=CS1|CS2;delay(2);FIO0SET=CS1|CS2;FIO2PIN = (FIO2PIN & 0xffffff00) + 0xc0; //起始行delay(5);FIO0CLR=CS1|CS2;delay(2);FIO0SET=CS1|CS2;FIO2PIN = (FIO2PIN & 0xffffff00) + 0xaf; //display on delay(5);FIO0CLR=CS1|CS2;delay(2);FIO0SET=CS1|CS2;for(i=0;i<4;i++){FIO0CLR=EN;FIO2PIN = (FIO2PIN & 0xffffff00) +(0xb8 + i);delay(5);FIO0CLR=CS1|CS2;delay(2);FIO0SET=CS1|CS2;delay(2);FIO2PIN = (FIO2PIN & 0xffffff00) + 0;delay(5);FIO0CLR=CS1|CS2;delay(2);FIO0SET=CS1|CS2|EN;for(j=0;j<61;j++){FIO2PIN = (FIO2PIN & 0xffffff00) + 0;delay(5);FIO0CLR=CS1|CS2;delay(2);FIO0SET=CS1|CS2;}}}//m:字符显示在液晶屏的位置0~14 n: 上下(0-3)//p:要显示的字符字模的首地址 FZ: 反正显示void send8(unsigned char m,unsigned char n,unsigned char p,unsigned char FZ) {unsigned char i,j,k;FIO0CLR=EN;FIO0SET=CS1|CS2;FIO2PIN = (FIO2PIN & 0xffffff00) + (0xb8+n);delay(2);FIO0CLR=CS1|CS2;delay(2);FIO0SET=CS1|CS2;for(i=0;i<8;i++){j = m*8 + i;FIO0CLR=EN;if(j > 60){FIO2PIN = (FIO2PIN & 0xffffff00) + (j - 61);FIO0CLR=CS2;}else{FIO2PIN = (FIO2PIN & 0xffffff00) + j;FIO0CLR=CS1;}FIO0SET=CS1|CS2|EN;aa = p*16 + i;k = GetChar8(aa);if(FZ == 0) //正常显示{FIO2PIN = (FIO2PIN & 0xffffff00) +k;}else{FIO2PIN = (FIO2PIN & 0xffffff00) +(~k);//反白显示}if(j > 60){FIO0CLR=CS2;}else{FIO0CLR=CS1;}FIO0SET=CS1|CS2;}FIO0CLR=EN;FIO2PIN = (FIO2PIN & 0xffffff00) +(0xb8 + n + 1);delay(2);FIO0CLR=CS1|CS2;delay(2);FIO0SET=CS1|CS2;for(i=0;i<8;i++){j = m*8 + i;FIO0CLR=EN;if(j > 60){FIO2PIN = (FIO2PIN & 0xffffff00) +(j - 61);FIO0CLR=CS2;}else{FIO2PIN = (FIO2PIN & 0xffffff00) +j;FIO0CLR=CS1;}FIO0SET=CS1|CS2|EN;aa = p*16 + i + 8;k = GetChar8(aa);if(FZ == 0){FIO2PIN = (FIO2PIN & 0xffffff00) + k;}else{FIO2PIN = (FIO2PIN & 0xffffff00) + (~k);}if(j > 60){FIO0CLR=CS2;}else{FIO0CLR=CS1;}FIO0SET=CS1|CS2;}}//m:汉字显示在液晶屏的位置0~14 n: 上下(0-3)//p:要显示的汉字字模的首地址 FZ: 反正显示void send16(unsigned char m,unsigned char n,unsigned char p,unsigned char FZ) {unsigned char i,j,k;FIO0CLR=EN;FIO0SET=CS1|CS2;FIO2PIN = (FIO2PIN & 0xffffff00) + (0xb8 + n); delay(5);FIO0CLR=CS1|CS2;delay(2);FIO0SET=CS1|CS2;for(i=0;i<16;i++){j = m*8 + i;FIO0CLR=EN;if(j > 60){FIO2PIN = (FIO2PIN & 0xffffff00) +(j - 61);FIO0CLR=CS2;}else{FIO2PIN = (FIO2PIN & 0xffffff00) +j;FIO0CLR=CS1;}FIO0SET=CS1|CS2|EN;aa = p*32 + i;k = GetChar16(aa);if(FZ == 0){FIO2PIN = (FIO2PIN & 0xffffff00) + k;}else{FIO2PIN = (FIO2PIN & 0xffffff00) + (~k);}if(j > 60){FIO0CLR=CS2;}else{FIO0CLR=CS1;}FIO0SET=CS1|CS2;}FIO0CLR=EN;FIO2PIN = (FIO2PIN & 0xffffff00) +(0xb8 + n + 1); delay(5);FIO0CLR=CS1|CS2;delay(2);FIO0SET=CS1|CS2;for(i=0;i<16;i++){j = m*8 + i;FIO0CLR=EN;if(j > 60){FIO2PIN = (FIO2PIN & 0xffffff00) +(j - 61);FIO0CLR=CS2;}else{FIO2PIN = (FIO2PIN & 0xffffff00) +j;FIO0CLR=CS1;}FIO0SET=CS1|CS2|EN;aa = p*32 + i+ 16;k = GetChar16(aa);if(FZ == 0){FIO2PIN = (FIO2PIN & 0xffffff00) +k;}else{FIO2PIN = (FIO2PIN & 0xffffff00) +(~k);}if(j > 60){FIO0CLR=CS2;}else{FIO0CLR=CS1;}FIO0SET=CS1|CS2;}}。
AT24c1024 LPC23XX驱动 i2c
void I2CSendByte(unsigned char ch)//写一个字节数据
{
unsigned char Byte_count=8;
SDA_out;
while(Byte_count--)
{
FIO0CLR=SD2401_SCL;
I2CWait(50);
//延时大约8uS
//sramadd_lo:每块内的EE字节地址,
//sramdata:数据
unsigned char I2CReadEEram(unsigned char page,unsigned int sramadd_lo)
{
unsigned char ddata=0;
I2CStart();
if(page==0)I2CSendByte(0xA0);
unsigned char Byte_count=8; unsigned char ddata=0; SDA_in;
第2页
AT24c1024 LPC23XX驱动
FIO0SET=SD2401_SDA;
while (Byte_count--)
{
ddata<<=1;
FIO0CLR=SD2401_SCL;
I2CWait(50);
//延时大约8uS
FIO0SET=SD2401_SCL;
I2CWait(50);
//延时大约8uS
if(FIO0PIN&SD2401_SDA)ddata=ddata|1;
}
FIO0CLR=SD2401_SCL;
return ddata;
}
//page:00:选择块0,01:选择块1,
LPC2378实验指导书

嵌入式系统实验指导书(LPC2378版)自动化学院实验教学中心年月日LPC2378工程的建立(1)建立新工程,工程名及路径可任意指定(建议存储路径:C:\myproject\...)。
(2)选择目标芯片a)选择Legacy Device Database [no RTE]b)选择NXP厂家下的LPC2378c)当询问是否拷贝‘LPC2300.s’文件到工程文件夹时应选择YESd)生成的工程文件在工作区中如下图所示(3)添加main.c程序源文件a)新建main.c源文件,main.c应保存在工程文件下用户自建的User文件夹中。
b)添加main.c程序源文件到工程中(4)编写main.c 程序程序第一行应为“ #include "LPC23xx.H" ”,包含LPC2378的头文件。
点击Rebuild按钮编译链接程序如果程序编译链接通过,将出现无错误提示,否则用户应按照错误提示更改程序。
(6)运行程序a)如下图中设定目标选项的参数b)点击下图中按钮,下载程序c)运行程序实验一基础程序设计实验一、实验目的(1)熟悉LPC2378系统套件的实验环境;(2)熟悉KEIL集成开发环境,掌握工程的生成方法;(3)熟悉汇编指令,掌握系统启动文件的汇编语言编写方法;(4)根据要求能够实现C语言的程序设计。
(5)掌握LPC2378技术手册的使用方法。
二、实验内容(1)学习LPC2378系统套件的组成及注意事项;(2)学习KEIL集成开发环境,构建LPC2378工程文件;(3)定位系统启动文件参数,对系统时钟、存储区及外设等进行配置;(4)以“随机数生成”程序为例,编译链接生成可执行文件,并下载运行程序;(5)运用KEIL集成开发环境的调试工具观察结果;(6)按照实验要求编写应用程序。
三、实验例程100以内随机数生成例程。
四、实验要求实现对生成的随机数进行排序,并记录排序后数据在原数据所处位置,观察、比对排序前后的数据变化。
uCOS-II嵌入式操作系统介绍与移植

OSStartHighRd
1、该函数是在OSStart函数中调用 2、负责从最高优先级任务的TCB中获得该任务的堆
栈指针sp,并依次将cpu现场恢复,这时系统就将 控制权交给用户创建的该任务进程,直到该任务被 阻塞或者被其他更高优先级的任务抢占cpu 3、该函数仅在多任务启动时被执行一次,用来启 动之前创建的第一个,也就是最高优先级的任务执 行
3、可从网站上获 得全部源码及其在各种体系结构平 台上的移植范例。
uC/OS-II特点
1、uC/OS-II内核具有可抢占的实时 多任务调度功能
2、提供了许多系统服务,如信号量、 消息队列、邮箱、内存管理、时间 函数等
3、这些功能可以根据不同的需求进 行裁减。
uC/OS-II的移植
ARM处理器相关宏定义
1、退出临界区
#defineOS_ENTER_CRITICAL() ARMDisableInt()
2、进入临界区
#defineOS_EXIT_CRITICAL() ARMEnableInt()
堆栈增长方向
1、堆栈由高地址向低地址增长,这个也 是和编译器有关的,当进行函数调用时, 入口参数和返回地址一般都会保存在当 前任务的堆栈中,编译器的编译选项和 由此生成的堆栈指令就会决定堆栈的增 长方向。
#define OS_STK_GROWTH 1
OS_CPU.c的移植
1、任务堆栈初始化 2、系统hook函数 3、中断级任务切换函数
任务堆栈初始化OSTaskStkInit
1、由OSTaskCreate或OSTaskCreateExt调用 2、用来初始化任务的堆栈并返回新的堆栈指针stk。
退出/进入临界区函数 ARMDisableInt/ARMEnableInt
KEIL-MDK开发工具 亿道电子

KEIL-MDK开发工具MDK提供嵌入式开发者所需的一切元素,强大易用的开发界面,各种调试适配器,支持诸如刘指令跟踪,代码覆盖率分析等独特功能,并提供一组中间件(如CAN接口,文件系统,USB协议,TCP/IP协议,GUI库)。
特性:●全面支持Crtex-M, Ccortex-R4, ARM7和ARM9设备●行业领先的C/C++编译工具链●µVision4 IDE,调试器,仿真环境●Keil RTX稳定的,资源占用小的实时操作系统(附源代码)●TCP / IP网络套件提供了多协议的各种应用●标准驱动程序类提供USB从设备和USB主设备堆栈●完整的GUI库提供具有图形用户界面的嵌入式系统●ULINKpro实时分析运行中的应用程序和记录每一个Cortex-M执行过的指令●程序执行的完整代码覆盖率分析●执行分析器和性能分析器使优化程序●众多工程实例帮助你迅速熟悉MDK-ARM强大内置功能●CMSIS Cortex单片机的软件接口标准●版本分类:功能MDK专业版MDK标准版MDK Cortex-M版MDK试用版IDE集成开发环境调试器32KB模拟器32KBC/C++编译器32KB汇编器链接器32KBARM微型库ARM标准库RTX 实时操作系统(含源代码)TCP/IP网络套件Flash文件系统库USB设备接口USB主机接口CAN驱动库(包含源代码)GUI库ULINK-ME (单独使用)ULINK2 (单独使用)ULINKpro (单独使用)数据和事件跟踪(SWV)流指令跟踪(ETM)代码覆盖率性能分析器运行分析工具Cortex-M0,M0+,M1,M3,M4Cortex-R4ARM7, ARM9SecureCoreWindows 操作系统XP SP2/Vista/Windows 7 (32/64)XP SP2/Vista/Windows 7 (32/64)XP SP2/Vista/Windows 7 (32/64)XP SP2/VistaWindows 7 (32/64)硬盘空间 1.4GB 1.4GB 1.4GB 1.4GB内存1GB(推荐2GB) 1GB(推荐2GB) 1GB(推荐2GB) 1GB(推荐2GB)ARM C/C++编译器:ARM和Thumb混合生成模式行业领先的代码尺寸优化行业领先的代码性能优化为硬件支持的函数属性嵌入式汇编器内联函数在CPU寄存器内传递参数IEEE-754标准的单双精度浮点微库:微库是针对C语言编写的基于ARM嵌入式应用的高度优化的库。
排爆机器人机械臂控制系统设计
排爆机器人机械臂控制系统设计摘要:如何处理战场上散落的未爆炸的弹药、战争中遗留的弹药以及恐怖分子放置的遥控炸弹和实验靶场上的未爆炮弹,一直是非常棘手的问题。
排爆机器人的研制与开发可以使人员在安全距离内不直接接触爆炸物,从而安全排除炸弹隐患。
基于此,本文主要对排爆机器人机械臂控制系统设计进行分析探讨。
关键词:排爆机器人;机械臂;控制系统设计1、前言排爆机器人是指能代替人到不能去或不适宜去的有爆炸危险的环境中,直接在事发现场进行侦察、搬运和处理爆炸物及其他危险品的机器人。
当排爆机器人移动到距离爆炸物较近距离时,后方操作人员控制机械臂接近爆炸物。
当排爆机器人进入最佳工作位置时,用机械臂接近爆炸物,根据现场情况决定是利用水炮枪将爆炸物击毁,还是利用机械臂手爪将爆炸物搬离现场后再处理。
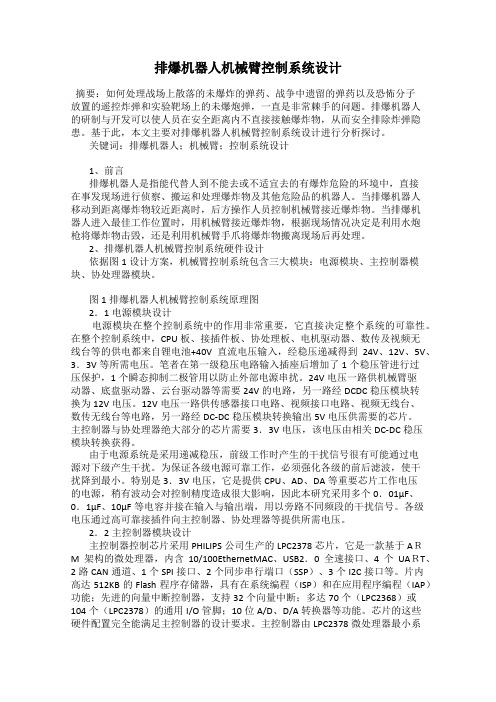
2、排爆机器人机械臂控制系统硬件设计依据图1设计方案,机械臂控制系统包含三大模块:电源模块、主控制器模块、协处理器模块。
图 1排爆机器人机械臂控制系统原理图2.1电源模块设计电源模块在整个控制系统中的作用非常重要,它直接决定整个系统的可靠性。
在整个控制系统中,CPU板、接插件板、协处理板、电机驱动器、数传及视频无线台等的供电都来自锂电池+40V直流电压输入,经稳压递减得到24V、12V、5V、3.3V等所需电压。
笔者在第一级稳压电路输入插座后增加了1个稳压管进行过压保护,1个瞬态抑制二极管用以防止外部电源串扰。
24V电压一路供机械臂驱动器、底盘驱动器、云台驱动器等需要24V的电路,另一路经DCDC稳压模块转换为12V电压。
12V电压一路供传感器接口电路、视频接口电路、视频无线台、数传无线台等电路,另一路经DC-DC稳压模块转换输出5V电压供需要的芯片。
主控制器与协处理器绝大部分的芯片需要3.3V电压,该电压由相关DC-DC稳压模块转换获得。
由于电源系统是采用递减稳压,前级工作时产生的干扰信号很有可能通过电源对下级产生干扰。
为保证各级电源可靠工作,必须强化各级的前后滤波,使干扰降到最小。
线性预测编码(LPC)技术及其在音频文件上的应用

线性预测编码(LPC)技术及其在音频文件上的应用
史水平;李世作
【期刊名称】《现代电子技术》
【年(卷),期】2004(027)004
【摘要】介绍了线性预测编码(LPC)技术原理和音频文件,尤其是波形音频文件格式,并且讨论了LPC技术在音频文件上的应用,同时给出了LPC处理WAVE文件流程图和WAVE文件恢复流程图.
【总页数】3页(P21-23)
【作者】史水平;李世作
【作者单位】广西大学,电气工程学院,广西,南宁,53004;广西大学,电气工程学院,广西,南宁,53004
【正文语种】中文
【中图分类】TN919.82
【相关文献】
1.计算机技术在舞美音响中的应用——如何利用Adobe Audition对采录的音频文件进行优化 [J], 任江
2.emWin在LPC1788上的移植与应用 [J], 张峰;张团善;吕双庆;徐锟
3.WAV音频文件的分句播放技术及应用 [J], 孙世军;彭承琳;白洋
4.LwIP在LPC23/24XX以太网MAC控制器上的移植与应用 [J], 施纯启;吴景东
5.线性预测编码技术及其在G.729中的应用研究 [J], 江波; 张江鑫
因版权原因,仅展示原文概要,查看原文内容请购买。
HID实验说明

USB HID实验说明
USB HID实验目录下有两个目录作用如下图所示
首先把下位机程序下载到LPC236X学习板中,可以通过ISP或JTAG方式下载打开工程:
重新编译一下。
本工程已经配置了ULINK2直接下载到目标板。
下载程序到FLASH
好,到此程序已经下载到LPC23XX上,
把板子上的J1,J2,J5跳线短接上。
连上USB-----PC
PC会认到“人体学输入设备”并自动安装驱动,无需人工干预。
接下来运行” HID_Client_PC端程序”目录中的程序
双击运行。
选择设备:
注意,如果此下拉匡没有LPC236X KIT HID则说明板子没有工作,注意J5的跳线。
选取后默认是如下:
下图是:板子上4个输入按键同时按下后及PC端控制8个LED同时熄灭的效果。
LPC1788中文手册
LPC1788中文手册UM10470LPC178x7x 用户手册修订版15 2011 年7 月6 日用户手册文档信息信息内容关键字 LPC1788FBD208 LPC1788FET208 LPC1788FET180 LPC1788FBD144 LPC1787FBD208 LPC1786FBD208 LPC1785FBD208 LPC1778FBD208LPC1778FET208 LPC1778FET180 LPC1778FBD144 LPC1777FBD208LPC1776FBD208LPC1776FET180LPC1774FBD208LPC1774FBD144 ARM2 2ARM Cortex-M332 位USB以太网LCDCANI CI SFlashEEPROM微控制器摘要 LPC178x7x 用户手册NXP SemiconductorsUM10470LPC178x7x 用户手册修订历史版本日期说明15 20110706 增加了Power Boost 功能的描述以及其它一些小的更新和改正14 20110610 发布官方版LPC178x7x 用户手册增加了事件监控器记录器一些小的更新和改正13 20110307 更换了缺失的图10一些小的更新和改正12 20110225 去除了反映产品初始发布的SPIFI 一些小的更新和改正11 20110125 一些小的更新和改正10 20101022 首次发布LPC178x7x 用户手册This translated version is for reference only and the English versionshall prevail in case of any discrepancybetween the translated and Englishversions版权所有 2012 恩智浦有限公司未经许可禁止转载联络信息更多信息请访问httpnxpcom销售办事处地址请发邮件至salesaddressesnxpcomUM10470第1章概述修订版15 2011 年7 月6 日用户手册11 简介LPC178x177x 是基于ARM Cortex-M3 的微控制器用于处理要求高集成度和低功耗的嵌入式应用Cortex-M3 是下一代内核在相同的时钟速率下能提供比ARM7 更高的性能并提供了系统增强型特性如现代化调试特性和支持更高级别的块集成Cortex-M3 CPU 具有3 级流水线和哈佛结构带独立的本地指令总线与数据总线以及用于外设的性能略低的第三条总线Cortex-M3 CPU 还包括一个支持随机跳转的内部预取单元LPC178x177x增加了一个专用的Flash 加速器使Flash 中代码执行达到最佳性能LPC178x177x 在最差的商用条件下的操作频率可以高达 120MHzLPC178x177x 的外设组件包括高达512kB 的Flash 存储器高达 96kB 的数据存储器4kB 的EEPROM 存储器一个用于SDRAM 和静态存储器存取的外部存储器控制器一个LCD 面板控制器一个以太网 MAC一个通用 DMA 控制器一个 USB 设备主机OTG2 2接口5 个UART3 个SSP 控制器3 个I C 接口一个I S 串行音频接口一个双通道CAN 接口一个SD 卡接口一个8 通道12 位ADC 一个10 位ADC 一个电机控制PWM一个正交编码器接口4 个通用定时器一个6 输出的通用PWM一个带独立电池电源和事件监控器记录器的超低功耗 RTC一个窗口式看门狗定时器一个CRC 计算引擎多达 165 个通用 IO 管脚等等LPC178x177x 的管脚引出线可与LPC24xx 和 LPC23xx保持管脚功能兼容UM10470 All information provided in this document is subject to legal disclaimers NXP BV 2011 All rights reserved用户手册修订版15 2011 年7 月6 日 3 of 1030NXP Semiconductors UM10470第1 章介绍信息12 特性具体型号的详细特性见14 节与LPC23xx 和24xx 系列器件可进行功能替换ARM Cortex-M3 处理器可在高至120MHz 的频率下运行Cortex-M3 执行Thumb-2指令集以实现最佳操作与代码长度包含硬件除法单周期乘法以及位字段操作等同时还包括一个支持8 个区的存储器保护单元MPUM3 内置了可嵌套向量中断控制器NVIC ARM Cortex-具有高达512kB 的片上Flash 程序存储器具有在系统编程ISP和在应用编程IAP功能把增强型的Flash 存储加速器和 Flash 存储器在CPU 本地代码数据总线上的位置进行结合则Flash 可提供高性能的代码高达96kB 的片上SRAM包括– 64kB SRAM 可供高性能CPU 通过本地代码数据总线访问– 2 个 16kB SRAM 模块带独立访问路径可进行更高吞量的操作这些 SRAM 模块可用于以太网USBLCD 以及DMA 存储器以及通用指令和数据存储– 4kB 片上EEPROM外部存储器控制器支持异步静态存储器件如RAMROM 和最多64MB 的Flash 以及像单数据速率SDRAM 这种动态存储器2AHB 多层矩阵上具有8 通道的通用 DMA 控制器GPDMA 它可结合SSPI S UARTSDMMCCRC 引擎模数与数模转换器外设定时器匹使配信号和GPIO用并可用于存储器到存储器的传输多层AHB 矩阵内部连接为每个AHB 主机提供独立的总线AHB 主机包括CPU通用DMA 控制器以太网 MACLCD 控制器以及 USB 接口这个内部连接特性提供无仲裁延迟的通信除非2个主机尝试同时访问同一个从机分离的APB 总线使CPU 与DMA 之间减少了延迟获得更高的吞吐量如果APB 不忙则单级写入缓存使CPU 能够连续工作而无需等待APB 写操作完成LCD 控制器同时支持超扭曲向列STN 与薄膜晶体管TFT 液晶显示屏–专用的DMA 控制器–可选显示分辨率最高1024 × 768 像素–支持高达24 位真彩色模式串行接口UM10470 All information provided in this document is subject to legal disclaimers NXP BV 2011 All rights reserved用户手册修订版15 2011 年7 月6 日 4 of 1030tors NXP SemiconducUM10470第1 章介绍信息–以太网MAC 带MIIRMII 接口与专用的DMA 控制器– USB 20 全速从机主机OTG 控制器带有用于从机与主机功能的片上 PHY 和一个专用DMA 控制器– 5 个 UART 带小数波特率发生功能内部FIFO IrDADMA 支持以及RS-485EIA-485 支持UART1 还有全套的调制解调器握手信号UART4 包含一个同步模式和一个支持ISO 7816-3 的智能卡模式144 管脚封装的器件提供4个UART– 3 个SSP 控制器带有FIFO可按多种协议进行通信SSP 接口可以与GPDMA 控制器一起使用22– 3 个增强型 I C 总线接口其中 1 个具有开漏输出功能支持整个 I C 规范和数据速率为 1MBits 的快速模式另外2 个具有标准的端口管脚增强型特性包括多地址识别功能与监控模式–双通道CAN 控制器2–用于数字音频输入或输出的 I S IC 之间音频接口带有小数速率控制功能2 2I S 接口可以与 GPDMA 一起使用I S 接口支持 3 线的数据传输与接收或 4线的联合式传输与接收连接以及主时钟输出其它外设– SD 卡接口同时支持MMC 卡–通用 IO GPIO 管脚带可配置的上拉下拉电阻开漏模式以及转发器模式所有GPIO 位于AHB 总线上以进行快速访问并支持Cortex-M3 位带宽bit-banding 通过通用DMA 控制器就可以访问GPIO 端口0 和2 的任何管脚均可生成中断208 管脚封装上有 165 个 GPIO180 管脚封装上有 141 个GPIO144 管脚封装上有109 个GPIO– 12 位模数转换器ADC 可在8 只管脚之间实现多路输入转换速率高达400kHz并具有多个结果寄存器12 位ADC 可以与GPDMA 控制器一起使用– 10 位数模转换器DAC具有专门的转换定时器并支持DMA 操作– 4 个通用定时器计数器共有8 个捕获输入和 10 个比较输出每个定时器模块都具有一个外部计数输入可以选择特定的定时器事件来生成DMA 请求– 1 个电机控制PWM支持三相电机控制–正交编码器接口可监控一个外接的正交编码器– 2 个标准的PWM定时器模块带外部计数输入UM10470 All information provided in this document is subject to legal disclaimers NXP BV 2011 All rights reserved用户手册修订版15 2011 年7 月6 日 5 of 1030NXP Semiconductors UM10470第1 章介绍信息–带有独立电源域的实时时钟RTCRTC 通过专用的RTC 振荡器来驱动RTC模块包括 20 字节的电池供电备份寄存器当芯片其它部分掉电时允许系统状态存储在该寄存器中电池电源可由标准的3V 锂电池供电当电池电压掉至21V的低电压时RTC 仍能继续工作RTC 中断可将CPU 从任何低功率模式中唤醒–事件监控器记录器当3 个输入的任何一个发生事件时它可以捕获RTC 的值事件标识与发生时间都存储在寄存器中事件监控器记录器使用RTC 电源域因此只要RTC 有供电它就能工作–窗口式看门狗定时器WWDT 窗口化运行专用的内部振荡器看门狗警告中断以及安全特性等– CRC 引擎模块可以根据提供的数据根据3 种标准多项式中的一种计算出CRCCRC 引擎可以与DMA 控制器联合使用因此在数据传输中无需CPU 介入就能生成一个CRC– Cortex-M3 系统节拍定时器包括外部时钟输入选项标准的JTAG 测试调试接口以及串行线调试与串行线跟踪端口选项支持实时跟踪的仿真跟踪模块单个33V 电源24V36V 温度范围-40?C85?C4 个低功率模式睡眠深度睡眠掉电深度掉电通过降低片上稳压器的输出电压可在 100MHz 或以下做省电运行4 个外部中断输入可配置为边沿电平触发PORT0 和 PORT2 上的全部管脚均可用做边沿触发的中断源不可屏蔽中断NMI输入时钟输出功能可反映主振荡器时钟IRC 时钟RTC 时钟CPU 时钟USB 时钟或看门狗定时器时钟的输出状态唤醒中断控制器WIC 允许 CPU 从时钟在深度睡眠掉电深度掉电模式下停止时发生的任何优先级中断中自动唤醒在处于掉电模式时可通过中断将处理器从掉电模式中的唤醒这些中断包括外部中断RTC 中断USB 活动中断以太网唤醒中断CAN 总线活动中断PROT02管脚中断和NMI 等带掉电检测功能可对掉电中断和强制复位分别设置阈值片上有上电复位电路片上晶振工作频率为1MHz25MHz12MHz 内部RC 振荡器IRC可在?1 的精度内调整可选择用做系统时钟通过片上 PLL没有高频晶振CPU 也可以最高频率运转可以从主振荡器或内部RC 振荡器上运行UM10470 All information provided in this document is subject to legal disclaimers NXP BV 2011 All rights reserved用户手册修订版15 2011 年7 月6 日 6 of 1030NXP SemiconductorsUM10470第1 章介绍信息第二个专用的PLL 可用于USB 接口从而增加了主PLL 设置的灵活性多功能管脚功能选择特性使片上外设功能的使用有了多种可能性简化电路板测试的边界扫描功能唯一的器件串行号码用于识别现有208 管脚LQFP208 管脚TFBGA 180 管脚TFBGA 以及144 管脚LQFP 封装UM10470 All information provided in this document is subject to legal disclaimers NXP BV 2011 All rights reserved修订版15 2011 年7 月6 用户手册日 7 of 1030NXP Semiconductors UM10470第1 章介绍信息13 应用通信–销售点终端Web 服务器多协议网桥工业医疗–自动化控制器应用控制机器人控制HVACPLC变频器断路器医疗扫描安保监控电机传动以及视频对讲等消费家电–音频MP3 解码器警报系统显示器打印机扫描仪小家电以及健身设备汽车–零部件汽车防盗GPS车队监控器UM10470 All information provided in this document is subject to legal disclaimers NXP BV 2011 All rights reserved用户手册修订版15 2011 年7 月6 日 8 of 1030NXP SemiconductorsUM10470第1 章介绍信息14 订购信息表1 订购信息型号封装名称描述版本LPC1788LPC1788FBD208 LQFP208 低矮方形扁平塑料封装208 根引线本体为28x28x14 mm SOT459-1LPC1788LPC1788FBD208 LQFP208 低矮方形扁平塑料封装208 根引线本体为28x28x14 mm SOT459-1LPC1788FET208 TFBGA208 超细间距球栅阵列塑料封装208 只球本体为15x15x07 mm SOT950-1LPC1788FET180 TFBGA180 超细间距球栅阵列封装180 只球本体为12x12x08 mm SOT570-2LPC1788FBD144 LQFP144 低矮四方扁平塑料封装144 根引线本体为20x20x14 mm SOT486-1LPC1787LPC1787FBD208 LQFP208 低矮方形扁平塑料封装208 根引线本体为28x28x14 mm SOT459-1LPC1786LPC1786FBD208 LQFP208 低矮四方扁平塑料封装208 根引线本体为28x28x14 mm SOT459-1LPC1785LPC1785FBD208 LQFP208 低矮方形扁平塑料封装208 根引线本体为28x28x14 mm SOT459-1LPC1778LPC1778FBD208 LQFP208 低矮方形扁平塑料封装208 根引线本体为28x28x14 mm SOT459-1LPC1788FET208 TFBGA208 超细间距球栅阵列塑料封装208 只球本体为15x15x07 mm SOT950-1LPC1788FET180 TFBGA180 超细间距球栅阵列封装180 只球本体为12x12x08 mm SOT570-2LPC1778FBD144 LQFP144 低矮方形扁平塑料封装144 根引线本体为1 20x20x14 mm SOT486-LPC1777LPC1777FBD208 LQFP208 低矮方形扁平塑料封装208 根引线本体为28x28x14 mm SOT459-1LPC1776LPC1776FBD208 LQFP208 低矮方形扁平塑料封装208 根引线本体为28x28x14 mm SOT459-1LPC1788FET180 TFBGA180 超细间距球栅阵列封装180 只球本体为12x12x08 mm SOT570-2LPC1774LPC1774FBD208 LQFP208 低矮方形扁平塑料封装208 根引线本体为28x28x14 mm SOT459-1LPC1774FBD144 LQFP144 低矮方形扁平塑料封装144 根引线本体为20x20x14 mm SOT486-1UM10470 All information provided in this document is subject to legal disclaimers NXP BV 2011 All rights reserved用户手册修订版15 2011 年7月6 日 9 of 1030NXP SemiconductorsUM10470第1 章介绍信息141 器件选项汇总表2 LPC178x177x 器件订购选项型号[1] Flash SRAM EEPROM 以太网 USBUART 外部存储器 LCD QEI SDkB kB kB总线[2]LPC178xLPC1788 512 96[5] 4 有 HOD-bit 有有有 5 3216-bit[3]8-bit[4][4]LPC1787 512 96[5] 4 无 HOD 5 32-bit 有有有LPC1786 256 80[6] 4 有 HOD 5 32-bit 有有有LPC1785 256 80[6] 4 无 HOD 5 32-bit 无有有LPC177xLPC1778 512 96[5] 4 有 HOD 5 32-bit 无有有16-bit[3]8-bit[4]LPC1777 512 96[5] 4 无 HOD 5 32-bit 无有有LPC1776 256 80[6] 4 有 HOD 5 32-bit 无有有16-bit[3]LPC1774 128 40 [7][7] 2 无 D 54[4] 32-bit 无无无8-bit[4]22[1] 所有型号包括2 个CAN 通道3 个SSP 接口3 个I C 接口I SDAC 和1 个8 路12 位的ADC[2] 可用封装的最大数据总线宽度可以采用比最大数据总线宽度小的数据总线宽度欲了解外部总线在不同封装上的具体应用请参见101 节[3] 180 管脚封装的外部总线被限制在16 位[4] 144 管脚封装不包括UART4 和DAC其外部总线被限制在8 位[5] 64kB 的CPU SRAM 外加32kB 外设SRAM[6] 64kB 的CPU SRAM 外加16kB 外设SRAM[7] 32kB 的CPU SRAM 外加8kB 外设SRAM[8] 16kB 的CPU SRAM 外加8kB 外设SRAMUM10470 All informationprovided in this document is subject to legal disclaimers NXP BV 2011 All rights reserved用户手册修订版152011 年7 月6 日 10 of 1030NXP SemiconductorsUM10470第1 章介绍信息15 简化方框图图1 LPC178x177x 简化方框图USB总线或JTAG接口以太网PHY接口LCD板收发器测试调试接口通用D 以太网1LCD USB 时钟产生功MA控 0 100 板接 OTG主时钟与控制率控制和其他制器 MAC 口机设备系统功能ARM Cortex-M3I-code D-code 系统总线总线总线EEPROM4 kBGPIO端口Flash Flash加速器 512 kB以太网 LCD SRAM寄存器寄存器多层AHB矩阵96 kB引导ROM8 kB 26-位地址USB CRC寄存器引擎静态动态 32-位数据存储器控制APB从机组0APB从机组1UARTs 0 1捕捉比较定时器01 捕捉比较定时器2 3SD卡接口12-位ADC管脚连接模块电动机控制PWMGPIO中断控制正交编码器if外部中断看门狗振荡器窗口式看门狗系统控制事件输入事件监控器记录器提醒注橙色外设模块支持通用DMA32 kHz振荡器实时时钟黄色外设模块包括专用DMA控制器电源电压超低稳压器备用寄存器20字节RTC 电源域UM10470 All information provided inthis document is subject to legal disclaimers NXP BV 2011 All rights reserved用户手册修订版15 2011 年7月6 日 11 of 1030NXP SemiconductorsUM10470第1 章介绍信息16 结构概述ARM Cortex-M3 包含三条AHB-Lite 总线一条系统总线以及I-code 和D-code 总线后二者的速率较快且与 TCM 接口的用法类似一条总线专用于指令拾取I-code 另一条总线用于数据访问D-code 当对不同的目标设备同时进行操作时这两条内核总线允许同步操作LPC178x177x 采用多层AHB 矩阵来连接Cortex-M3 总线并以灵活的方式将其它总线主机连接到外设这种方式允许不同的总线主机同时访问矩阵上不同从机端口的外设从而优化了性能多层矩阵连接的详情见图2APB 外设使用多层AHB 矩阵的独立从机端口通过两条APB 总线连接到CPU 这样就减少了CPU 与DMA 控制器之间的争用从而获得更好的性能APB 总线桥被配置为缓冲区写操作使得CPU 或DMA 控制器无需等待APB 写操作结束17 ARM Cortex-M3 处理器ARM Cortex-M3 是一款通用的32 位微处理器它具有高性能和超低功耗的特性Cortex-M3提供了很多新的特性包括Thumb-2 指令集低中断延时硬件除法可中断可连续的多次装载与存储指令中断状态的自动保存与恢复紧密结合中断控制器与唤醒中断控制器多条内核总线可同时用于访问采用了流水线技术使得处理系统与存储器系统的各个部分都能连续工作通常情况下当一个指令正在执行时第二个指令正在进行解码而第三个指令正在从存储器中拾取ARM Cortex-M3 处理器详情请见本手册附带的《Cortex-M3 用户指南》171 Cortex-M3 配置选项LPC178x177x 使用Cortex-M3 CPU 的r2p0 版它包括一系列可配置选项具体如下系统选项包括嵌入式向量中断控制器NVICNVIC 包括了SYSTICK 定时器包括唤醒中断控制器WIC WIC 具有将CPU 从低功耗模式下唤醒的更有效选项包括存储器保护单元MPU包括了ROM 表ROM 表提供了调试部件到外部调试系统的地址调试相关选项包括JTAG 调试接口UM10470 All information provided in this document is subject to legal disclaimers NXP BV 2011 All rights reserved用户手册修订版15 2011 年7 月6 日 12 of 1030NXP Semiconductors UM10470第1 章介绍信息包括串行线调试串行线调试允许只使用两条线进行调试简单的跟踪功能可增加第三条线包括了嵌入式跟踪宏单元ETMETM 提供指令跟踪功能包括数据观察点与跟踪DWT单元DWT 允许数据地址或数据值匹配为跟踪信息或触发其它事件DWT 包括4 个比较器和计数器以用于特定的内部事件包括指令跟踪宏单元ITM软件可写ITM以发送消息到跟踪端口包括了跟踪端口接口单元TPIU TPIU 解码并向外面提供跟踪信息这可以在串行线浏览器管脚或4 位并行跟踪端口上实现包括了 Flash 修补与断点FPBFPB 可以产生硬件断点并且在代码空间中重新映射到特定的地址到SRAM 作为更改非易失性代码的临时方法FPB 包括2 个文字比较器和6 个指令比较器18 片上Flash 存储器系统LPC178x177x 包含了多达512kB 的片上Flash 存储器Flash 存储器加速器实现了CPU存取性能的最大化该存储器可以同时用于代码与数据的存储对 Flash 存储器的编写有若干种方式来实现它可通过串行端口来进行在系统编程应用程序也可以在运行时对Flash 进行擦除和或编程从而为数据存储域固件升级等操作带来极大的灵活性19 片上静态RAMLPC178x177x 包含多达96kB 的片上静态RAM 存储器高达64kB 的SRAM CPU 与通用 DMA 控制器可访问位于较高速总线上另外2 个高达 16kB 的SRAM 模块可提供最多32kB 的SRAM主要用于外设数据当两个SRAM 均存在时它们位于AHB 多层矩阵上的独立从机端口上这种结构允许各自执行CPU 和DMA 访问操作从而减少总线主机延迟或没有延迟它还允许区分不同外设功能的数据从而提高系统性能例如LCD DMA 可以占用一个SRAM而以太网DMA 则占用另一个与此同时CPU 则使用系统SRAM 做数据和或指令存取110 片上EEPROMLPC178x177x 包括高达4kB 的片上EEPROM 存储器EEPROM 只允许CPU 访问UM10470 All information provided in this document is subject to legal disclaimers NXP BV 2011 All rights reserved用户手册修订版15 2011 年7 月6 日 13 of 1030NXP SemiconductorsUM10470第1 章介绍信息111 详细方框图图2 LPC178x177x 方框图CPU 和总线JTAG接口以太网PHY接口LCD板USB总线或收发器CLK测试调试接口通用DM 以太网 LCDUSB 时钟产生功 OUTOTG主A控制器 10 100 板接口机设备时钟与控制率控制和其他MAC系统功能ARM Cortex-M3Vdd内部电源稳压器EEPROMI-code D-code总线总线系统总线4 kBFlashFlash加速器512 kB系统RAM Boot ROM 驱动ROM64 kB 8 kB 16 kB外设RAM 外设RAM16 kB 16 kB静态动态存储器控制控制Mem Cti GPDMA 以太网寄 LCD USB CRC HS寄存器寄存器存器寄存器寄存器引擎 GPIO多层AHB矩阵AHB 至 AHB 至APB桥 APB桥APB从机组0 APB从机组1捕捉比较定时器0 1 捕捉比较定时器2 3SD卡接口12-位ADC管脚连接模块电动机控制PWMGPIO中断控制正交编码器if外部中断看门狗振荡器窗口式看门狗系统控制事件输入事件监控器记录器提醒注橙色外设模块支持通用DMA32 kHz振荡器实时时钟黄色外设模块包括专用DMA控制器电源电压超低稳压器备用寄存器20字节RTC 电源域UM10470 All information provided in this document is subject to legal disclaimers NXP BV 2011 All rights reserved用户手册修订版152011 年7 月6 日 14 of 1030UM10470第2章 LPC178x7x 存储器映射修订版15 2011 年7 月6 日用户手册存储器映射与外设寻址 21ARM Cortex-M3 处理器含有一个4GB 的地址空间下表显示了LPC178x177x 如何使用该空间表3 LPC178x177x 存储器使用及明细地址范围用途地址范围明细及描述0x0000 0000 to 片上非易失性存储器 0x0000 00000x0007 FFFF用于配有512kB Flash 存储器的设备0x1FFF FFFF0x0000 00000x0003 FFFF 用于配有256kB Flash 存储器的设备0x0000 00000x0001 FFFF 用于配有128kB Flash 存储器的设备0x0000 00000x0000 FFFF 用于配有64kB Flash 存储器的设备片上SRAM 0x1000 00000x1000 FFFF 用于配有64kB 本地SRAM 的设备0x1000 00000x1000 7FFF 用于配有32kB 本地SRAM 的设备0x1000 00000x1000 3FFF 用于配有16kB 本地SRAM 的设备引导芯片 0x1FFF 00000x1FFF 1FFF 带Flash 功能的8kB 引导芯片0x2000 0000 to 片上 SRAM 通常 0x2000 00000x2000 1FFF 外设RAM-Bank0 第一个8kB0x3FFF FFFF 用于存储外设数据 0x2002 00000x2000 3FFF外设RAM-Bank0 第二个8kB0x2000 40000x2000 7FFF 外设RAM-Bank1 16kBAHB 外设 0x2008 00000x200B FFFF 详见231 节0x4000 0000 to APB 外设 0x4000 00000x4007 FFFF APB0个外设模块每个16kB 外设包含多达320x7FFF FFFF 0x4008 00000x400F FFFF APB1 外设包含多达32 个外设模块每个16kB0x8000 0000 to 通过外部存储控制器 4 个静态存储器片选0xDFFF FFFF 的片外存储器[1]0x8000 00000x83FF FFFF 静态存储器片选0 多达64MB[2]0x9000 00000x93FF FFFF 静态存储器片选1 多达64MB0x9800 00000x9BFF FFFF 静态存储器片选2 多达64MB0x9C00 00000x9FFF FFFF 静态存储器片选3 多达64MB4 个动态存储器片选0xA000 00000xAFFF FFFF 动态存储器片选0 多达256MB0xB000 00000xBFFF FFFF 动态存储器片选1 多达256MB0xC000 00000xCFFF FFFF 动态存储器片选2 多达256MB0xD000 00000xDFFF FFFF 动态存储器片选3 多达256MB0xE000 0000 to Cortex-M3 私有外设 0xE000 00000xE00F FFFFCortex-M3 相关功能包括可嵌套向量中断控制器0xE00F FFFF 总线和系统节拍定时器[1] 如果使能了地址转换模式存储量可以多达256MB高位地址为0x8FFFFFFF参见0 位SCS 寄存器 381 节[2] 如果使能了地址转换模式存储量可以多达128MB高位地址为0x97FFFFFF参见0 位SCS 寄存器381 节UM10470 All information provided in this document is subject to legal disclaimers NXP BV 2011 All rights reserved用户手册修订版15 2011 年7月6 日 15 of 1030NXP Semiconductors UM10470第2 章LPC178x7x 存储器映射22 存储器映射LPC178x177x 包含多个独立的存储区域如下图所示图3 显示的是复位后从用户编程角度所看到的整个地址空间映射中断向量区支持地址的重新映射这将在本节后面说明图3 和表5 显示了从不同角度所观察到的外设地址空间AHB 外设区域为2MB可分配多达128 个外设APB 外设区域为1MB可分配多达64 个外设每个外设空间大小都为16kB这样可以简化每个外设的地址解码UM10470 All information provided in this document is subject to legal disclaimers NXP BV 2011 All rights reserved用户手册修订版15 2011 年7 月6日 16 of 1030NXP SemiconductorsUM10470第二章LPC178x7x 存储器映射图3 LPC 1788 系统存储器映射LPC 178x7x 存储器空间 APB 1 外设保留系统控制私有外设总线保留保留 SD卡QEI外存储器 4个动态片选电机控制PWM保留外存储器 4个静态片选SSP2保留 I2SUART4APB外设位段寻址I2C2保留 UART3APB外设组1 UART2定时器3APB外设组0定时器2保留DAC外设RAM位段寻址 SSP0保留保留AHB外设APBO外设外设RAM 1 保留I2C1外设RAM 0 保留8 kB boot ROM CAN 2CAN 1保留CAN 公用I-code和D- 64 kB本地RAM CAN AF寄存器code存储器空间保留 CAN AF RAMADC512 kB Flash存储器SSP1管脚连接有效中断向量 AHB外设GPIO中断RTCEMC寄存器保留GPIOI2C0保留PWM1CRC引擎PWM0USBUART1LCD控制器UART0以太网定时器1通用DMA控制器定时器0看门狗定时器All information provided in UM10470this document is subject to legal disclaimers NXP BV 2011 All rights reserved用户手册修订版15 2011 年7 月6 日 17 of 1030NXP SemiconductorsUM10470第二章LPC178x7x 存储器映射23 片上外设所有外设寄存器不管规格大小都按照字地址进行分配32 位边界这样就不再需要使用字节定位映射的硬件来进行小边界的字节8 位或半字16 位访问这样做的结果是所有字寄存器与半字寄存器都是一次性访问例如不能对一个字寄存器的最高字节执行单独的读或写操作231 AHB 外设下表给出了AHB 总线矩阵上的外设功能地址有关寄存器的完整描述可见相关章节表4 AHB 外设及基址AHB 外设基址外设名称0 0x2008 0000 to 0x2008 3FFF 通控制器用DMA1 0x2008 4000 to 0x2008 7FFF 以太网MAC2 0x2008 8000 to 0x2008 BFFF LCD 控制器3 0x2008 C000 to 0x2008 FFFF USB 接口4 0x2009 0000 to 0x2009 3FFF CRC引擎5 0x2009 4000 to 0x2009 7FFF 保留6 0x2009 8000 to 0x2009 BFFF GPIO7 0x2009 C000 to 0x2009 FFFF 外部存储控制器8 to 15 0x200A 0000 to 0x200B FFFF 保留232 APB 外设地址下表显示了2 个APB 总线的地址映射APB 外设不会全部用完分配给它们的16kB 空间通常每个器件的寄存器在各个 16kB 范围内的多个位置上采用―别名‖或重复表5 APB0 外设及基址APB0 外设基址外设名称0 0x4000 0000 看门狗定时器1 0x4000 4000 定时器02 0x4000 8000 定时器13 0x4000 C000 通用异步收发传输器04 0x4001 0000 通用异步收发传输器15 0x4001 4000 PWM06 0x4001 8000 PWM17 0x4001 C000 2I C08 0x4002 0000 保留9 0x4002 4000 实时时钟和时间监视器记录器10 0x4002 8000 GPIO 中断11 0x4002 C000 管脚连接模块12 0x4003 0000 串行同步接口113 0x4003 4000 AD 转换器14 0x4003 8000 CAN 接收滤波器RAM15 0x4003 C000 CAN 接收滤波器寄存器UM10470 All information provided in this document is subject to legal disclaimers NXP BV 2011 All rights reserved用户手册修订版15 2011 年7月6 日 18 of 1030NXP SemiconductorsUM10470第二章LPC178x7x 存储器映射APB0 外设基址外设名称16 0x4004 0000 CAN 公用寄存器17 0x4004 4000 CAN 控制器118 0x4004 8000CAN 控制器219 to 22 0x4004 C000 to 0x4005 8000 保留23 0x4005 C000 2I C124 to 31 0x4006 0000 to 0x4007 C000 保留表6 APB1 外设及基址APB1 外设基址外设名称0 to 1 0x4008 0000 to 0x4008 4000 保留2 0x4008 8000 串行同步接口03 0x4008 C000 DA 转换器4 0x4009 0000 定时器25 0x4009 4000 定时器36 0x4009 8000 通用异步收发传输器27 0x4009 C000 通用异步收发传输器328 0x400A 0000 I C29 0x400A 4000 通用异步收发传输器4210 0x400A 8000 I S11 0x400A C000 串行同步接口212 to 13 0x400B 0000 to 0x400B 40。
最新玉樵夫条幅机常见故障解决方案

玉樵夫条幅机技术教材第一章常见问题及解决方法(附表)27.点击打印显示超时,IP地址不对,或不是交叉网线,或主板网口有问题。
28.点击打印显示暂停时,机器上的暂停按钮按下去了,驱动程序版本不匹配。
29.点击打印显示连接正常,不工作的,检查主板上面的驱动插头有没有插好,拔下来重插,检查驱动器是否有电是否正常,或重装条幅机的驱动程序。
30.用文泰打印乱码的,检查属性里面,纸张是否设置的黑白,布局里面的打印方向是否是纵向。
31.用绘通打印出现0%机器没反应,检查机器上面的暂停按钮有没有按下去,网络打印的情况下检查IP地址是否正确。
或按一下主板CPU上面的复位键,或更换主板。
32.用绘通软件打印出现100%机器没反应,检查主板上面的驱动插头有没有插好,拔下来重插,检查驱动器是否有电是否正常。
33.用USB打印出现通讯问题,请检查是否选择的USB打印方式或更新USB驱动程序。
34.绘通软件排好版以后点打印,弹出数据处理中的对话框,蓝色一格格的进度条传输到最后没有消失卡主了,机器没有反应。
处理方案;1、检查IP地址对不对。
2、检查黄色暂停按钮是否按下去了。
3、主板复位键在通电状态下按一下。
35、绘通软件排好版以后点打印,弹出数据处理中的对话框,蓝色一格格的进度条传输到最后消失了,机器没有反应。
处理方案;1、通电状态下,检查24V电源盒是否有电。
2、24V电源盒有电的状态下,压机头按钮不按下去,电脑上排好版正常打印,把手放在打印头的下面,摸一下打印头加不加热。
如果打印头加热,检查主板上的驱动插头查好了吗?或更换驱动器排除。
36、900C字空字间距胶辊不转,但是打字正常,打出来的条幅内容没有字间距。
处理方案;1、驱动器故障,请更换驱动器。
37、900C字空字间距胶辊转,但是布拉不动,打印出来的条幅米数短。
处理方案;1、放布阻尼,阻力太大拉不动,调小阻尼阻力。
2、更换大一点的压机头电机电容。
900F色块条幅机常见问题一、打印效果不好(如:打字起边差,局部透红)字打出来显的特别差(热)布上沾色。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
关于LPC24XX的程序移植近来单片机升级了,一下子进入32位时代,有点措手不及!还好,网络互相的现代,工程师不必从头开始,充分利用网络资源,加快开发进程。
由于以前一直使用KEIL开发51单片机,使用方便,便于调试仿真。
值得庆幸的是现在ARM型单片机也可以在KEIL中调试。
可是网上大部分ARM实例是基于ADS的。
直接移植过来就会一警告和错误。
为了加快开发进程,还是选择移植借鉴部分实用例程。
具体解决问题方法如下:新推出的KEIL版开发工具RVMDK与老版ADS在工具架构组成上有以下不同:ARM编译器版本、调试器、软件仿真、以及调试单元。
出现如下提示:USBdma.h(128): warning: #1-D: last line of file ends without a newline compiling USBDriver.c...USBHAL.h(40): warning: #1-D: last line of file ends without a newline USBdma.h(128): warning: #1-D: last line of file ends without a newline提示:"文件结束了但没有空行"这个警告, 这是由RVMDK编译器产生的警告,所有程序文件最后一行必须有空行,也可不去理它。
在提示处按一下回车就行了。
Startup.s(214): warning: A1608W: MOV pc,<rn> instruction used, but BX <rn> is preferredStartup.s(258): warning: A1608W: MOV pc,<rn> instruction used, but BX <rn> is preferred由于编译器版本的变化,对应的编译选项也有所变化。
将options for target中asm标签页里面的Eenable ARM/Thumb interworking复选框去掉,就不产生这样的告警信息啦,不过不知道这样做会影响什么!也可以根据提示改为BX跳转。
如果您的程序中存在ARM/Thumb指令相互调用的情况,那么使用BX指令能够返回到正确的处理器状态。
而使用MOV指令则不能实现处理器状态的切换。
所以keil编译器建议您使用BX指令。
例如把MOV PC, LR 改为BX LR 。
fio_release.axf: Error: L6238E: startup.o(vectors) contains invalid call from '~PRES8' function to 'REQ8' function FIQ_E xception.fio_release.axf: Error: L6238E: startup.o(vectors) contains invalid call from '~PRES8' function to 'REQ8' function Targe tResetInit.这是由于对目标文件进行链接时,ARM工具的连接器会严格检查各个文件(objects),判断它们是否复合ARM体系结构的ABI表准。
由于RVCT与ADS编译链接工具所遵循的ARM ABI不同,所以将ADS 的遗留工程直接移植到RVMDK并进行连接时,用户可能会遇到错误或者警告:新工具的ABI要求在函数调用时,系统必须保证堆栈指针8byte 对齐,即每次进栈或者出栈的寄存器数目必须为偶数。
这是为了能够更加高效的使用STM与LDR指令对“double”或者“long long”类型的数据进行访问。
而老的ARM开发工具ADS并没有考虑到新的ARM内核架构,其ABI对于堆栈的操作仅仅要求4byte对齐。
所以当用户将在ADS中编译连接成功的工程代码移植到RVMDK上,或者将老的、ADS遗留的目标文件、库文件在新工具RVMDK中进行连接时,RVMDK的连接器就会报出以上的错误。
解决方法如下:在每个汇编文件的开头,添加“PRESERVE8”指令。
AREA vectors,CODE,READONLY之前加PRESERVE8。
如下:AREA vectors,CODE,READONLY改为:PRESERVE8AREA vectors,CODE,READONLY检查汇编源码中的指令,确保堆栈操作指令是8byte对其的。
ADS的遗留代码一次性将5个寄存器压栈,由于ARM的指令寄存器宽度为32位,即4byte,显然5个寄存器入栈之后,堆栈指针不能够满足64位,8byte对齐。
为了解决这种情况,我们可以将另外一个并不需要压栈的寄存器,R12,同时压栈,这样当6个32位寄存器进栈之后,堆栈就能满足64位对齐了。
如:STMFD SP!, {R0-R3, LR}改为:STMFD SP!, {R0-R3, R12,LR} 好了通过以简单的更改,程序通过了。
由于接触时间太短,分享的只是解决方法,详细部分还不太清楚。
希望共同讨论!Linker Error: L6238E: foo.o(.text) contains invalid call from'~PRES8' function to 'REQ8'默认分类2008-07-11 14:42:21 阅读86 评论0 字号:大中小订阅Linker Error: L6238E: foo.o(.text) contains invalid call from '~PRES8' function to 'REQ8'function foobarApplies to: Assembler, Linker, RealView Developer Kit (RVDK) for OKI , RealView Developer Suite (RVDS) 2.0, RealView Developer Suite (RVDS) 2.1, RealView Developer Suite (RVDS) 2.2, RealView Development Suite (RVDS) 3.0, RealView Development Suite (RVDS) 3.1This RVDS/RVCT linker error is given where a stack alignment conflict is detected in object code. The "ABI for the ARM Architecture" demands that code maintains 8-byte stack alignment at its interfaces. This allows efficient use of LDRD and STRD instructions (in ARM Architecture 5TE and later) to access 8-byte-aligned "double" and "long long" data types.Symbols like '~PRES8' and 'REQ8' are "Build Attributes" of the objects.∙PRES8 means the object PREServes 8-byte alignment of the stack.∙~PRES8 means the object does NOT preserve 8-byte alignment of the stack (~ meaning NOT).∙REQ8 means the object REQuires 8-byte alignment of the stack.This link error typically occurs in two cases:∙where assembler code (that does not preserve 8-byte stack alignment) calls compiled C/C++ code (that requires 8-byte stack alignment), and∙when attempting to link legacy SDT/ADS objects with RVCT 2.x objects. Legacy SDT/ADS objects that do not have these attributes are treated as '~PRES8', even if they doactually happen to preserve 8-byte alignment.For example:Error: L6238E: foo.o(.text) contains invalid call from '~PRES8' function to 'REQ8' function foobarThis means that there is a function in the object foo.o (in the section named .text) that does not preserve 8-byte stack alignment, but which is trying to call function foobar that requires 8-byte stack alignment.A similar warning that may be encountered, where the address of an external symbol is being referred to, is:Warning: L6306W: '~PRES8' section foo.o(.text) should not use the address of 'REQ8' function foobarSolutionsThere are two possible approaches to dealing with this issue:1) If you have access to all your source code and are allowed to rebuild itIn this case you should rebuild all your objects/libraries using the latest version of the compilation tools. Note that if you have any assembler files, you will need to:i) check that all instructions preserve 8-byte stack alignment, and if necessary, correct them.e.g. change:STMFD sp!, {r0-r3, lr} ; push an odd number of registersto:STMFD sp!, {r0-r3, r12, lr} ; push an even number of registersand:ii) add the PRESERVE8 directive to the top of each assembler file.e.g. change:AREA Init, CODE, READONLYto:PRESERVE8AREA Init, CODE, READONLY(the PRES8 attribute applies to the whole object, not just the code section).2) If you cannot rebuild all of your source codeIf you have any legacy objects/libraries that cannot be rebuilt, either because you do not have the source code, or because the old objects must not be rebuilt (e.g. for qualification/certification reasons), then you must inspect the legacy objects to check whether they preserve 8-byte alignment or not. Use "fromelf -c" to disassemble the object code. C/C++ code compiled with ADS 1.1 or later will normally preserve 8-byte alignment, but assembled code will not.If your objects do indeed preserve 8-byte alignment, then the linker error L6238E can be suppressed with the use of "--diag_suppress 6238" on the linker command line. By using this, you are effectively saying "I guarantee that these objects are PRES8". The linker warning L6306W is suppressible with "--diag_suppress 6306".If you are linking with legacy objects/libraries then you should also read the information on the option "--apcs /adsabi" in the FAQ entry "Are legacy ADS objects/libraries compatible with RVCT 2.0 ?".。