2012亚太大学生机器人大赛国内选拔赛招新通知
2012中国教育机器人大赛程序册20121120最新介绍

黄心汉,华中科技大学控制科学与工程系教授,博士生导师, 智能与控制工程研究所所长。兼任中国人工智能学会常务理事、 智能机器人专业委员会主任,中国自动化学会机器人专业委员 会委员等职。长期从事自动控制理论、工业自动化及机器人原 理与控制技术的教学和科研工作,在智能控制、智能机器人、 传感技术及信息融合技术等方面有较深造诣。
负责人。主持建设的课程被评为国家级精品课程。 周献中,南京大学工程管理学院教授,控制工程系主任。
2001 年 9 月获南京理工大学中青年后备学科带头人特等奖。 2005 年 4 月获南京大学博士生导师资格。主要从事控制与系 统工程学科领域的教学和科研工作。
张彦铎,武汉工程大学党委常委,副校长,教授,湖北 省有突出贡献的中青年专家。同时兼任中国人工智能学会智 能机器人专业委员会委员、机器人足球技术专业委员会委员, 国际机器人足球联盟中国分会华中地区召集人,湖北省第十 届青年联合会委员,湖北省青年科技工作者协会理事。
1
龚振邦 王田苗 王越超 汪劲松 谭民 褚健 黄强 谈自忠 李泽湘
教授,上海大学 教授,北京航空航天大学 研究员,中科院沈阳自动化所 教授,电子科技大学 研究员,中科院自动化所 教授,浙江大学 教授,北京理工大学 教授,美国华盛顿大学 教授,香港科技大学
大学生机器人大赛烽烟再起2007年亚太大学生机器人大赛国内选拔赛

28 《机器人技术与应用》双月刊第4期2007年亚太大学生机器人大赛国内选拔赛大学生机器人大赛烽烟再起机器人比赛栏目主持:李良琦本刊记者 李良琦得分与战车位置对应关系比赛场地示意图 2007年7月31日 《机器人技术与应用》 29在自动区内,有6条与正十边形的边平行的引导线及20条呈辐射状的引导线。
自动区由3个区域组成,分别是自动机器人启动区、外自动区和内自动区。
自动机器人启动区是两个1m×1m的方形区域,分别供红绿两队使用。
外自动区是多边形的最外圈,有10辆战车位于此区,战车上可放木块。
内自动区在外自动区里边,此区域内也有10辆战车。
在此区中央,分别用红、蓝色直线各连接3辆战车构成了红队和蓝队的V字形。
1.2 机器人 每个参赛队必须自己设计和制作手动机器人和自动机器人参赛。
每场比赛中,每队只允许有一台手动机器人,自动机器人不能超过3台。
每个队用于整个比赛的所有机器人的总重不得超过50kg。
手动机器人必须通过电缆操作,不允许用射频控制。
手动机器人只能在手动区和外自动区运行,不能进入或伸入内自动区、对方自动机器人启动区、对方的木块存放区,也不能接触本队的自动机器人和对方在自动区的自动机器人。
另外,手动机器人不得妨碍对方抓取对方木块存放区的木块。
每队只允许1名操作手在比赛场地上操作手动机器人。
比赛一旦开始,参赛队员不能接触手动机器人。
每台自动机器人在由队员启动后必须是自主的。
所有机器人启动后,负责启动的队员必须立即退出赛场,站在木围栏外。
一旦机器人启动,参赛队员不能接触机器人。
对于自动机器人,每场比赛每队允许一次“重试”。
“重试”的申请被裁判允许后,参赛队员必须将自动机器人搬回自动机器人启动区,并尽快启动它们。
1.3 比赛 比赛开始前,机器人的设置必须在接到设置命令l分钟之内完成。
每场比赛将持续3分钟。
如果一队建成“指南车”,不管对方得分多少,即赢得该场比赛。
比赛在完成“指南车”时结束。
亚太大学生机器人大赛

f.两队的手动机器人都允许在此区域内运行,但不得进入对方的银河区。
g.架桥部件的细节及位置参见所附的场地布局平面图。
参赛队成员⑴每个参赛队由来自同一所大学或工学院的4名成员组成,3名学生和l名指导老师。
只有3名学生可以进入赛场。
⑵参赛队成员在参加比赛时必须是在大学/工学院注册的。
f.每场比赛中每队只允许一次重试。
⑶控制方法a.每队只有一个操作者可以在赛场上操纵手动机器人。
b.只有在启动自动机器人和一次重试时,自动机器的操作者才能进入赛场。
c.每台自动机器人必须一次操作启动。
⑷能源a.比赛期间各队应为自己的所有机器人准备能源。
b.机器人的电源电压必须低于DC24V。
c.不允许使用组委会认为危险和不适当的能源。
d.自动机器人启动区尺寸为1200mm×1200mm,位于每队区域的下中部。
e. 20个立方形礼品和1个贵重礼品放在每队牛郎区(A区)的13个不同点上。
礼品的安排如下:• 1个点放一个贵重礼品;• 7个点放一个立方形礼品;• 2个点放两个堆起来的立方形礼品;• 3个点放三个堆起来的立方形礼品。
f.礼品的1分箱放在蓝队的右侧和红队的左侧。
方形箱子的尺寸为1000mm×1000mm,用100mm高3mm厚的聚碳酸脂板制成。
g.只有自动机器人可以在牛郎区(A区)运行。
自动机器人可以利用30mm宽的白色引导线寻找礼品和鹊桥所在的方位。
h.牛郎区(A区)中的安排细节参见所附的场地布局平面图。
⑸织女区(B区)a.范围:直径2000mm的圆形区域。
b.织女区(B区)的中央有一个放礼品的2分箱。
箱子的直径为1400mm,用100mm高3mm厚的聚碳酸脂板制成。
2010亚太大学生机器人大赛国内选拔活动合作方案

机器人大赛的国内选拔赛受到国家相关领导部门 以及中央电视台的高度重视, 以及中央电视台的高度重视,为品牌传播创立了 良好的政府公关机会。 良好的政府公关机会。
合作报价
2010年亚太大学生机器人大赛XXX杯国内选拔 2010年亚太大学生机器人大赛XXX杯国内选拔 年亚太大学生机器人大赛XXX 合作报价: 410万元 合作报价: 410万元
科技创新 独享平台
提升品牌内涵
推广品牌“为了满足受众不断创新的能力和意识” 推广品牌“为了满足受众不断创新的能力和意识”。
创新的脚步不停, 创新的脚步不停, 不断满足受众最新需求 创新精神:八年来, 创新精神:八年来,机器人大 赛把“创新” 赛把“创新”作为大赛主旨精神 被不遗余力地发挥和展现―― ――创 被不遗余力地发挥和展现――创 新的作品、创新的形式、 新的作品、创新的形式、创新的 主题, 主题,大赛的竞技水平和比赛规 模也由此逐年提升。 模也由此逐年提升。
赞助标版
角标
片尾鸣谢
广告回报
大赛现场植入回报
背板融入
现场横幅
比赛现场
其他
三、大赛亮点
权威赛事 直击校园
直击校园
学校支持:大赛不仅有纯粹理工 学校支持: 科院校, 科院校,还有由各知名综合学府 派队参加,号召力强劲, 派队参加,号召力强劲,罕见的 展示品牌高端性的机会. 展示品牌高端性的机会. 大学生热衷:大赛是学生展示个 大学生热衷: 人知识素质和团队协作能力的契 在大学生群体中关注度强烈, 机,在大学生群体中关注度强烈, 参赛热情空前高涨。 参赛热情空前高涨。
大赛主办单位
主办单位: 主办单位:中央电视台 协办单位:国家教育部、科技部 协办单位:国家教育部、 中国科学院、 中国科学院、中国科协
大学生机器人大赛
亚太大学生机器人大赛亚太大学生机器人大赛赛事简介:机器人现状:机器人代表了一个国家机械、电子等多行业的综合实力,是一种综合了机械、电子、计算机、控制论、机构学、信息和传感、人工智能、仿生学等多学科先进技术与一体而形成的高新技术产品。
机器人研究主要涉及机器人学、机电一体化、单片机、图像处理与图像识别、知识工程与专家系统、多智能体协调、以及无线通讯等等领域。
机器人有三个发展阶段,那么也就是说,我们习惯于把机器人分成三类,一种是第一代机器人,那么也叫示教再现型机器人,它是通过一个计算机,来控制一个多自由度的一个机械,通过示教存储程序和信息,工作时把信息读取出来,然后发出指令,这样的话机器人可以重复的根据人当时示教的结果,再现出这种动作,比方说汽车的点焊机器人,它只要把这个点焊的过程示教完以后,它总是重复这样一种工作,它对于外界的环境没有感知,这个力操作力的大小,这个工件存在不存在,焊的好与坏,它并不知道,那么实际上这种从第一代机器人,也就存在它这种缺陷,目前工业机器人就是处于这个状态,因此,在 20 世纪 70 年代后期,人们开始研究第二代机器人,叫带感觉的机器人,这种带感觉的机器人是类似人在某种功能的感觉,比如说力觉、触觉、滑觉、视觉、听觉和人进行相类比,有了各种各样的感觉,比方说在机器人抓一个物体的时候,它实际上力的大小能感觉出来,它能够通过视觉,能够去感受和识别它的形状、大小、颜色。
那么第三代机器人,也是我们机器人学中一个理想的所追求的最高级的阶段,叫智能机器人,那么只要告诉它做什么,不用告诉它怎么去做,它就能完成运动,感知思维和人机通讯的这种功能和机能,那么这个目前的发展还是相对的只是在局部有这种智能的概念和含义,但真正完整意义的这种智能机器人实际上并没有存在,而只是随着我们不断的科学技术的发展,智能的概念越来越丰富,它内涵越来越宽。
机器人比赛现状:随着智能技术突飞猛进的发展、教育理念的不断更新,作为综合了信息技术、电子工程、机械工程、控制理论、传感技术以及人工智能等前沿科技的机器人技术也在为教育改革贡献自己的力量。
2012亚太机器人设计方案

2012亚太机器人大赛设计方案介绍——机器人机构设计CADzhangliying一、比赛规则说明:1 场地形状——不是中心对称、轴对称。
2 有无对抗性——无对抗性。
3 机器人数量——一个手动机器人,两个自动机器人。
4 行走路线——两种行走路线,需要进行比较分析。
5 本届比赛的难点在哪里?关键点在哪里?①比赛时,左右区域的不固定性,给设计方案制造很多麻烦。
②手动机器人要将代币准确投入到代币箱中,因此对手动机器人的机械手臂的要求比较高。
③公共区域取篮子,可能发生争执。
④采摘机器人需要上台阶,所以设计时需要注意它的移动机构的设计。
需要采用一些特殊的行走机构。
⑤采摘机器人采摘过程中定位要准确,以便于准备投篮。
二、线路选择:1、第一条路线相对于第二条路线来说,行走的路程要短,路程短了,相应地可以节省很多的时间。
但是对采集机器人的要求比较高。
需要机器人自己上台阶并且准确定位。
由于机器人方面的工作,可以在之前的准备阶段得以改进,比赛的时候就可以节省大量的时间,所以本设计方案选择第一条路线。
2、第二条路线行走路线比较长,但是操作起来比较简单,对机器人的要求相对比较小,比赛的时候仅为3分钟,由于时间方面的原因,本设计没有采用第二条线路。
注意:比赛时,本参赛队伍可能在左边的区域运行,也可能在右边的区域运行,自动机器人和采集机器人的程序设定就需要有两种路线的方案,在设计控制方案的时候需要注意到这一点,即左右两个地图都需要进行存储,设定路线,左右转向等。
具体实施按照比赛时所分到的左右区域而定,本设计以右边区域运行为例,来进行设计和分析。
以下将不予以说明,请读者注意。
三、行走路线图中,黄色方块代表手动机器人,对应的行走路线为蓝色部分(往返路线都包括在内);粉色方块代表自动机器人,对应的行走路线为绿色部分;蓝色方块代表采摘机器人,对应的行走路线为红色部分。
具体行走路线的说明以及这三个机器人是如何实现的:手动机器人:操作员要搭乘在手动机器人上,开始启动手动机器人,行走到代币所在的位置,然后启动机器人的机械手臂,用机械手臂夹取代币。
2012年7月全国第十二届机器人竞赛获奖名单VEX小学组

第十二届中国青少年机器人竞赛
VEX机器人挑战赛获奖列表(小学组) 序号 组别 1 小学组 2 小学组 3 小学组 4 小学组 5 小学组 6 小学组 7 小学组 8 小学组 9 小学组 10 小学组 11 小学组 奖项 一等奖 一等奖 一等奖 一等奖 一等奖 一等奖 二等奖 二等奖 二等奖 二等奖 二等奖 代表团 安徽 福建 河北 参赛队 安徽省合肥市红星路小学 队员 陈一凡;吴欣然;袁浩宇;张琪悦; 寒; 徐 教练员
新疆维吾尔自治区巴音郭楞蒙古自治州 蔡雨佳;王昱皓;马越;蔡佳玉; 刘琛;马永庆; 库尔勒市第五中学
海南省昌江黎族自治县青少年活动中心 麦秋强;钟东辰;谭玉茜; 湖南省长沙市雨花区砂子塘泰禹小学 北京市海淀区中关村第三小学 广东省佛山市南海桂城外国语学校 河南省青少年机器人俱乐部队 李琛;石琛杰;江天越;
张天昊;闫浚达;王元伯;杨若妤; 绍辉;宋鹏辉; 安 周斌斌;杜子枫;梁深发; 黄忠健;
刘泽昊;刘家琦;张文龙;晁彦舜; 晓敏;李娜;潘体育; 施
白永鹏;马竞淑;秦守政;牛元丰; 志刚;张方永;吴哲; 李 程小清;余牧野;张嘉恒;王克炎; 艳丽;潘体育; 张 王海林;孙齐;马洋;杨忠豪; 王广斌;马世昌;
王子泓;雷棋元;黎晁麟;黄博城; 明;黄东明; 钟 洪铖;陈一迪;陈伟; 邵震伟;
杨孝承;尹燕航;赵子涵;陈子涵; 健;何友猛;陈冰; 张 杜欣泽;郝浚婓;赵忠瑞; 王新民;蒋鲁苏;谭淑霞;
第 2 页,共 3 页
12 小学组 13 小学组 14 小学组 15 小学组 16 小学组 17 小学组 18 小学组 19 小学组 20 小学组 21 小学组 22 小学组 23 小学组 24 小学组 25 小学组
二等奖 二等奖 二等奖 二等奖 二等奖 三等奖 三等奖 三等奖 三等奖 三等奖 三等奖 三等奖 三等奖 三等奖
2012亚太大学生机器人国内选拔赛规则

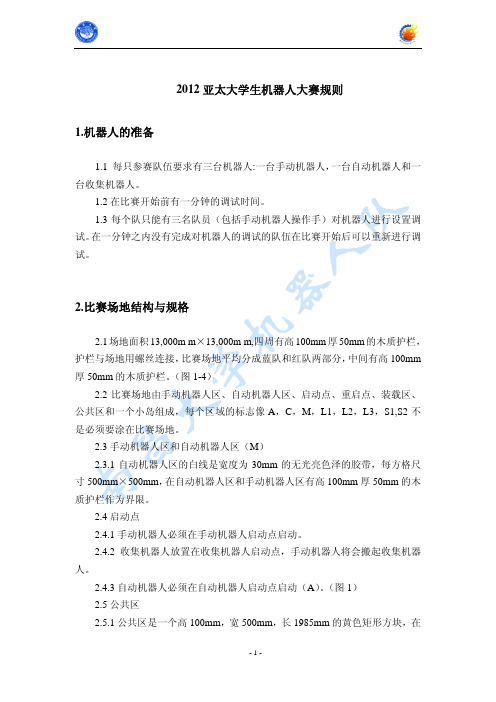
附件12012亚太大学生机器人国内选拔赛规则1.每个队伍允许使用:一个手动机器人、一个自动机器人和一个收集机器人。
2.比赛场地和物体2.1 比赛场地尺寸为 13000mm*13000mm ,被高100mm厚度为50mm 的木头栅栏所包围。
木头栅栏用螺钉固定。
场地被高 100m m厚 50mm 的母头栅栏平均分成两半,分别给红、蓝两队(图表 1-4 )。
2.2 场地包括一个自动机器人区域、手动机器人区域、起始位置、重置位置、装载地、公共区域和投放台。
场地的标识符例如 A C M L1 L2 L3 S1 S2 不必标识在真实的场地上。
2.3 启动位置2.3.1 手动机器人必须从手动机器人启动位置( M) 开始。
2.3.2 收集机器人放在收集机器人启动位置(C), 收集机器人会被手动机器人带走(装载)。
2.3.3 自动机器人必须从自动机器人启动位置( A) 开始(图表 1)2.4 公共区域2.4.1 公共区域是颜色为黄色,高 100mm 的矩形,长为1985mm,宽为 500mm 的区域。
两个深度为 12mm 直径为 452mm的槽口放置在公共区域的表面。
比赛开始前两个槽口分别放上一个篮筐。
每个队伍只能在公共区域取一个篮筐。
(图表2 、13 )3. 比赛步骤和任务3.1 在比赛开始之前,手动机器人的操作者骑上手动机器人。
3.2 手动机器人操作者驾驶手动机器人从始发区到存放幸运币地点。
3.3 手动机器人拿起幸运币并携带它。
3.4 手动机器人的操作者驾驶手动机器人到达隧道处。
3.5 到达隧道处,手动机器人将幸运币插入幸运币盒子。
手动机器人的任何部分不允许接触幸运币盒子。
第一次穿过隧道时在没有将幸运币投放到盒子中之前,手动机器人不允许开始前进穿过隧道。
3.6 当幸运币被完全放入盒子时,裁判给以开始信号,自动机器人才可以自动启动,也可以由操作者按下开始按键。
自动机器人可以抓起存放在公共区的篮筐将其放在手动区的任何位置。
精心准备 精心设计 出精品

精心准备精心设计出精品摘要:本文通过组织黑龙江科技学院机器人代表队,参加亚太大学生机器人大赛选拔活动,介绍了从组建队伍,方案设计到采购元件,制作过程方法和参赛中获得较理想的结果。
关键词:机器人参赛制作获奖亚太大学生机器人大赛选拔活动是在“亚洲太平洋地区广播电视联盟”倡导下,由中央电视台精心策划、周密安排、组织实施,从2002年至2011年已先后共主办了国内选拔活动以选拔队伍参加亚太区国际大赛。
因为参赛活动具有很大的影响力和竞争力,参赛院校和参赛人数越来越多,推动和促进了各院校机器人的技术水平有了显著的提高,现已有很多大学已经形成了非常成熟的机器人研发带头人及制作队伍,专门从事为大赛活动长期进行机器人研制。
2007年亚太大学生机器人大赛国内选拔活动于2007年5月20日在北京首钢篮球中心举行,共有39所高院报名,参与了此次大学生机器人大赛的角逐。
“华夏之光”是本届选拔活动的主题,其规则是根据黄帝造指南车的故事制定的。
每个参赛队由来自同一所大学的4名成员组成,其中包括3名学生和1名指导老师。
参赛队操作手动机器人(代表黄帝)和自动机器人(代表工匠)把木块放到“战车”上。
其中最先把木块放到“战车”顶部的队便占有了这辆“战车”,最先用占有比赛场地中央的“战车”建成V字形“指南车”的队就是获胜队,每场比赛的时间为3分钟。
现代科技突飞猛进,智能机器人已悄然走进我们的生活,且必将成为社会经济的重要增长点。
亚太大学生机器人大赛旨在机器人文化的传播。
鉴于本届大赛主题“华夏之光”,黑龙江科技学院代表队4台参赛机器人分别为每台机器人取了寓意深刻的名字――即千手观音、冰成、龙梦、勇士。
为了更好地参与2007亚太机器人大赛,学院和教务处领导高度重视并给予大力支持,成立了由指导教师和参赛学生的机器人电视大赛专题组,首先制定了机器人小组人员的招聘、面试及研发等各项规章制度,明确制作和正常学习关系(不能保证完成学习任务的同学将劝退),研发程序为:①组织学习竞赛规则,学习往届比赛特点和可以借鉴结构方案和控制方法。
2012亚太大学生机器人大赛规则中文版
2012亚太大学生机器人大赛规则1.机器人的准备1.1 每只参赛队伍要求有三台机器人:一台手动机器人,一台自动机器人和一台收集机器人。
方块表面有两个直径452mm,深12mm的圆形凹痕,用来放置两个篮子,每支队伍只能拿其中的一个。
(图2,13)2.6篮子2.6.1两个篮子分别放在公共区的两个圆形凹痕处,每个篮子由三部分组成:一个直径450mm高400mm,用HIPS片和塑料网或是尼龙网(内有有六根螺纹杆)做成的篮子,一个直径450mm,HIPS材料的底座,一个直径80mm高388mm 的圆筒(PVC管材),整个篮子的重量为2.85Kg。
(图8、11)500mm,深12mm的圆形凹痕,用来放置篮子,放置篮子由手动机器人完成。
(图2、13)2.9装载区2.9.1装载区1(L1)长1965mm,宽1520mm位于手动机器人区,在自动机器人启动区(A)的旁边。
2.9.2装载区2(L2)是一个长1500mm,宽1500mm,高200mm的台子,位于小岛的一边,相当于一个登上小岛的台阶。
(图13)3.比赛过程和任务3.1比赛开始前,手动机器人操作手要骑在手动机器人上。
3.2手动机器人操作手操纵手动机器人从启动点到硬币架。
3.3手动机器人从硬币架上拿起硬币。
3.4手动机器人操作手操纵手动机器人到达隧道。
由自动机器人发射非无线电信号启动,或者收集机器人靠自身启动。
3.18当手动机器人搬起收集机器人并有物理接触时,手动机器人允许与收集机器人通过非射频的方式通信。
3.19收集机器人脱离手动机器人,能够自身直立在小岛上时,可以自己夹取包山上的包子放到篮子中。
只有当包子被夹取并完全放到篮子中,才被认为抢包成功。
掉落在场地上的包子不可以被再次使用。
4.4自动机器人启动点(A)(自动机器人离开自动机器人启动点之后)4.4.1如果自动机器人未能成功的从公共区搬起篮子,或是未能放置到手动区,自动机器人须从自动机器人启动点(A)重新启动,篮子将会被放回到公共区原位置。
博思机器人--亚太地区VEX机器人世界锦标赛中国区域选拔赛规则及解读

如何做好工程记录 真实性。工程手册不是一个结果,而是一种过 程的体现。裁判们不希望看到一个干净整齐的 “最终版”,而是一个真实可信的记事本。错 别字、墨水点、勾画、磨损和皱边都是工程手 册的一部分。请切记保证记录本的真实 个性化。大赛鼓励每个队伍在工程手册中体现 其个性。这本手册将会成为你的队伍美好的回 忆
关于首届亚太地区VEX机器人世界锦标赛选拔赛
第一届亚太地区VEX机器人世界锦标赛选拔赛已经在 2007年10月在韩国结束
2007年首届亚太地区VEX机器人世界锦标赛选拔赛比赛现场
关于亚太地区VEX机器人世界锦标赛选拔赛
由来自中国大陆、香港、韩国、新加坡等国家和地区的60支 队伍参加,其中的优胜者于2008年5月1~3日赴美国落杉矶市 加州大学参加2008年VEX机器人世界锦标赛
充人
机器人要有强的攻击性和防御性 机器人的结构要牢靠 机器人的对抗性要强 机器人不能要任何尖锐突出物 注意机器人的电线的排列
机器人如何在比赛时间内进更多的球 能够抓取场地上任何位置的比赛球 能够从场地的一边穿过另一边 机器人能够停止在停泊区 机器人的对抗性要强,耐冲击 充分考虑比赛的特点,增强机器人的互补性
Think. Create. Build. Amaze. Vex.
亚太地区VEX机器人工程挑战赛 中国区域选拔赛规则解读及参考
目
录
关于首届亚太地区VEX机器人世界锦标赛选拔赛 关于2008年VEX机器人世界锦标赛 关于第二届亚太地区VEX机器人世界锦标赛选拔赛 关于亚太地区VEX机器人工程挑战赛中国区域选拔赛 选拔赛的比赛规则解读及参考
谢
谢
中国区域选拔赛比赛场地(桥式战斗)
比赛场地 示意图
比
人型机器人全能挑战赛规则

第三届亚洲机器人锦标赛中国区选拔赛人型机器人全能挑战赛竞赛规则(2012.04)一、任务要求人型机器人在规定的时间内完成多项机器人挑战动作。
每个动作都有相应的分数,动作的完成需按照从比赛确定的启始区出发按照逆时针方向顺序依秩完成,完成动作越多及用时越少,所得成绩越好。
在比赛中,参赛选手除了要掌握机器人编程和对物理、力学平衡等知识的应用外,还要考虑如何面对一个多任务的项目,在有限时间内取得最好的成绩。
二、竞赛场地说明竞赛场地的外尺寸是235cm×113cm,上面有机器人跨栏、机器人钻障碍、机器人侧向行走、机器人上下楼梯和机器人滑雪的场地设施。
在场地中粗黑线是机器人做每项动作的起始线(或终止线)。
机器人在做每项动作前双脚不能越过本动作任务的启始线和上一个动作任务的终止线,在做每项动作时机器人必须从本动作任务的起始线进入,机器人的双脚完全越过本动作的任务终止线才可以视为机器人完成该动作。
竞赛场地环境为冷光源、低照度、无磁场干扰。
但由于一般赛场环境的不确定因素较多,例如,场地表面可能有纹路和不平整,光照条件有变化等。
参赛队在设计机器人时应考虑各种应对措施。
三、任务说明和得分1.机器人跨栏(1)规则跨栏尺寸如图所示。
要求机器人以任意手段通过指定高度的栅栏。
机器人可以接触栏,但不得碰翻或移动栏(栏的任一部分的垂直投影不得超出起始线、终止线),否则视为动作失败而不能得分。
(2)记分机器人成功跨过栏,可获得该项动作的100分,不成功则得0分。
2.机器人钻障碍(1)规则障碍物尺寸如图所示。
要求机器人以任何手段从一个具有固定高度的障碍物的底下钻过。
在障碍物的上面有一个平衡杆,杆的材质为塑胶,直径是1cm。
机器人可以接触障碍物,但不得碰翻或移动障碍物(即障碍物的任一部分的垂直投影不得超出起始线、终止线),否则视为动作失败而不能得分。
机器人若钻过障碍物,但碰落了上面的平衡杆,将按照规则罚分。
(2)记分机器人成功钻过障碍物,可获得该项动作的100分,不成功则得0分。
2012中国机器人大赛医疗与服务机器人比赛规则

2012中国机器人大赛暨RoboCup公开赛医疗与服务机器人组比赛规则2012年6月1日一、概述中国机器人大赛暨RoboCup公开赛医疗与服务机器人赛项2012年的比赛内容作如下调整。
机器人向实际应用方向发展有其重要的现实意义与长远的研发价值。
医疗与服务机器人赛项正是引导机器人向实际应用方向发展的重要切入点。
1、实施本项目具有长远的战略意义机器人要真正“实用”是极其艰难的,尤其是“医用”更是难乎其难,需要大批拔尖创新人才、高技能人才为之长期攻关和付出。
因此实施本项目具有长远的战略意义。
在上海举办的举世瞩目的世博会上,欧洲馆的主题是:“智能欧洲。
”可见世界发达国家已把机器人的发展方向瞄准了开发成智能化的产品。
在这种国际背景下中国机器人大赛暨RoboCup公开赛组委会审时度势把医疗与服务机器人设立为赛项,旨在引领我国有识之士投身到医疗与服务机器人的研发与竞赛中来。
2、实施本项目是当务之急虽然机器人的实际应用尤其是医用不是一蹴而就的,但不能阻挡我们只争朝夕地研发和向实际应用方向前进的脚步。
在产品向智能化方向发展的大环境下,我国大学生已进行了多届机器人大赛,有了良好的基础。
引领参赛选手向机器人实际应用方向发展已是水到渠成。
我国目前每年要进口数以千亿元计的医疗器械,尤其是昂贵的医疗手术机器人(进口的达芬奇手术机器人每台的价格高达2千多万元)。
因此引领我国大学生参加医疗与服务机器人竞赛,尤其是引领他们创新设计研制医疗与服务机器人已经成为当务之急。
3、实施本项目的可操作性基于上述分析,大赛组委会决定设“医疗与服务机器人组”,希望通过此项目比赛增强选手的实际应用能力,尤其是增强选手普遍关注的在高科技领域就业的竞争能力。
本赛项为选手提供广阔的施展才华的舞台,同时也让选手有章可循。
技术委员会既考虑项目的实用性、先进性、新颖性,更考虑到项目的可参与性和可操作性以及在经济上的可承受性,也就是着重考虑使项目适合竞赛,符合学校实际、学生实际,因此特决定把竞赛分为独立的两个子赛项:1)医疗与服务机器人规定动作赛项,本赛项兼设青少年组;2)医疗与服务机器人创新设计与制作赛项,本赛项兼设青少年组和教师发明组。
2012年中国机器人大赛舞蹈机器人大学组(常规组)比赛规则

2012年中国机器人大赛舞蹈机器人大学组(常规组)比赛规则本组参赛机器人可以采用市场销售的常规成品设备。
同时,鉴于双足人形机器人在平衡控制方面具有较高的技术要求,为了增强比赛的技术性和观赏性,比赛项目分为:(一)双足人形组(1)参加比赛的每一台机器人,其机体必须符合人体构型,明显有两条腿、两只手臂、一个头及躯干部分;(2)机器人必须有不少于十五个关节自由度组成(伺服舵机或伺服电机);(3)两条腿及足部之间不能有任何连接机构;(4)成品机器人容许添加辅助机构,但该机构上不得带有动力元件;(5)每一个机器人本体必须搭载独立的电源和控制系统。
(二)多足异形组(含轮式)(1)参加比赛的机器人,其机体构型不做限制,也可以容许有双足人形机器人参与比赛;(2)机器人必须有不少于十二个关节自由度组成(伺服舵机或伺服电机);(3)机器人本体可以是独立整体结构,也可以是分体组合结构;(4)成品机器人容许添加辅助机构,机构上可以带有动力元件;(5)每一个机器人本体(含分体部分)必须搭载独立的电源和控制系统。
比赛规则:一、比赛场地:1、舞台:舞蹈场地是1.6m×1.8m的平坦区域,场地为绿色薄地毯,地毯厚为2mm-3mm,地毯下为平整硬质木板,周围有5cm高围墙,舞蹈机器人必须在该范围内运动,具体材质以实际场地为准。
2、场景:主办方不提供任何需要的场地布景设备,参赛者可携带表演所需要的场地布景,但不能损坏比赛场地或对随后的参赛队伍造成影响,架设场地布景时间应控制在4分钟以内,撤除场地布景应在2分钟内。
在比赛中如果出现意外而使比赛场地受损,主办方将提供备用场地。
3、音乐:各队需自备机器人表演所需音乐的CD光碟或mp3文件。
推荐选取高质量光碟,只录有表演所需的音乐,并需标明参赛队队名,在比赛之前交给主办方音乐播放工作人员。
4、动作规定参加双足人形组比赛的机器人必须完成如下规定动作:⑴单腿独立双臂平衡动作(5分)⑵三点倒立(头、双臂)双脚劈叉动作(5分)⑶前滚翻或后滚翻动作(5分)⑷单臂俯卧撑动作(5分)⑸侧向翻滚动作(5分)完成以上规定动作者相应加分,否则扣分。
大学机器人大赛通知

2012年亚太机器人大赛国内选拔赛中,****团队再次挺进八强,但终负于最后的国际总冠军电子科技大学。
2013年又是新的起点,新主题、新规则、新挑战,需要新思维、新策略、新技术,更需要注入新鲜血液。
******大学****团队为招揽有志之士,增强同学们对机械、电控的了解,特面向全校各年级各专业本科生举办首届******大学机器人大赛。
活动流程①10月14日报名参赛的同学于上午8:00之前到七教103集合,8:00宣读比赛注意事项,8:10统一发放试题。
②10月14日~10月26日参赛同学根据比赛试题进行设计,10月26日23:00前将参赛作品同参赛信息表一并发至大赛指定邮箱********@ 或交至七教地下室大学生科技活动基地。
③10月27日由机器人实验室对所有参赛作品进行初评,评选结果将以短信形式通知参赛同学。
④10月28日,初评入围方案的设计者于10:00在七教103进行答辩,进行复评。
⑤10月29日~11月3日复评晋级者继续完善作品,如需实际操作,机器人实验室将提供材料、工具、场地等支持;⑥11月4日8:00在七教103进行最终答辩,由设计者阐述作品的改进情况,实验室成员根据作品创意、可行性,作者专业知识掌握情况、实际操作能力四方面作出最终评选并颁发荣誉证书,获奖者合影留念,邀请获奖者加入机器人团队。
⑦活动后期整理方案,将优秀作品引入参赛机器人的开发制作中。
大赛专用QQ群:********,电子版报名表、试题等资料详见寻共享。
奖项说明一等奖:机械组、电控组各1名;二等奖:机械组、电控组各2名;三等奖:机械组、电控组各3名;优秀奖:机械组、电控组各4名;(所颁发证书均为校级证书)注意事项①参赛作品的设计要新颖、有创意。
②参加答辩的同学要在最短的时间内讲述方案,语言要简练、明了。
③允许借鉴历年各高校优秀方案,但应杜绝完全照搬。
④对于被判断为作弊的作品,欲通过非正当手段(如凭关系等)获奖的选手,一律取消其参赛资格。
《竞赛机器人》制作

南昌大学机电工程学院 刘国平
“亚广联亚太地区机器人大赛”是由“亚洲—太平洋广播联盟”
(Asia-pacific Broadcasting Union 缩写ABU、简称亚广联) 节目部1999年发起倡导的,各个亚广联成员机构都有权参加该项 目的比赛,但参赛对象只限于各国的大学或工科院校的学生。
《竞赛机器人制作》
《竞赛机器人制作》
(六)组织团队活动
基地同学不定期自主组织工作、学习、交流会,短途自行车 旅行,集中组织队员听讲座、看汇演、团队聚餐等活动,设计队 服、队徽,进行不定期心理讲座。
《竞赛机器人制作》
(七)2012年竞赛情况 1)组织参加“亚太地区大学生机器人大赛”,备赛历时10个
《竞赛机器人制作》
竞赛奖项
学术论文
技术专利
创新产品
大 学 生 机 器 人 竞 赛 、 创 新 创 业 基 地
CCTV亚太地区大学生机器人竞赛
江西省大学生智能机器人竞赛
挑战杯、机械创新设计、飞思卡尔智能车
1、大学生创新创业训练计划 2、实践课程、毕业设计
3、数学、力学、物理、3D建模等竞赛
《竞赛机器人制作》
(五)小组讨论和例会培训制度 每周各任务小组在例会之前进行最少一次的讨论,检讨任务 完成情况,分析技术难点和困难,明确下阶段任务和时间安排。
指导老师每周召开例会,听取各任务小组工作进展汇报,答
疑解惑,解决争持问题,纠正存在的偏差。2012年9月9日至 2013年6月4日参赛之前,共主持30次例会。
副教授
副教授 副教授 副研究员 讲师 讲师 讲师 讲师 讲师
指导教师
指导教师 指导教师 指导教师 指导教师 指导教师 指导教师 指导教师 指导教师
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2012亚太大学生机器人大赛国内选拔赛招新通知亚洲广播电视联盟亚太地区机器人大赛(简称ABU-ROBOCON,以下同)由亚太地区广播电视联盟(亚广联)发起,致力于培养各国青少年对于开发、研制高科技产品的兴趣与爱好,提高各参与国的科技水平,为机器人工业的发展发掘培养后备人才。
该赛事每年举办一次,自2002年第一届ABU-ROBOCON 在日本举办以来已经成功举办了十届。
每年的ABU-ROBOCON决赛由亚广联的成员国轮流承办,2012年第十一届ABU-ROBOCON国际赛将在中国香港举行。
每年一届的比赛,除承办国外,其他各国只能有一只参赛队代表本国出征ABU-ROBOCON国际赛。
CCTV2012亚太大学生机器人大赛国内选拔赛,正是为了选拔中国代表队而举办。
近年参加国内选拔赛的有北京航空航天大学、北京理工大学、上海交通大学、西安交通大学、华中科技大学、武汉大学、电子科技大学等40多所国内知名大学的代表队。
自2002年开始,北京邮电大学代表队在学校有关领导和老师的关心支持下,参加了第一届到第十届的亚太大学生机器人大赛国内选拔赛。
2002年攀登富士山顶
2003年太空征服者
2004年鹊桥相会
2005年登长城,点圣火
2006年修建双子高塔
2007年下龙湾的传说
2008年竞技牛郎
2009年胜利鼓乐
2010年辉煌金塔
2011年祈福荷灯
经过十年的比赛磨砺,我校机器人团队有了一定的技术积累,机电创新基地建设有了一定的规模,也形成了比较完善的组织管理模式。
取得了2次季军,5次八强,及最佳创意,最佳策略,最佳技术等多个技术专项奖,是国内赛场上一支闻名的传统强队。
亲们,你可曾体会过:当你自己亲手设计制作的机器人驰骋在比赛场上,完成一个个优美的动作时,在亿万人面前展示时,那心情是何等的激动?当置身舞台聚光灯下,注视着赛场上我们北邮机器人的佳绩时,是何等的荣耀?当亲手接过那沉甸甸的奖杯,是何等的自豪?当你置身于CCTV镜头下,想着远在故乡的父母、亲人在电视机前看到你的身影时,是何等的兴奋?
这里的我们,渴望梦想和进步,珍视团队和协作,期盼再创荣耀和辉煌!你想体会上述激情彭湃的感觉吗?亲们,加入我们吧!
2012年,是一个新的起点,新主题、新规则、新挑战,需要新思维、新策略、新技术,更需要新的血液注入,北京邮电大学机器人代表队面向全校招揽有识之士。
在这里,您可以尽显所长,让您的梦想付诸现实;
在这里,通过理论与实践的结合,您的专业技能会更上一层楼;
在这里,您可以结交各路有识之士,共同奋斗,挥洒汗水,创造辉煌。
北京邮电大学机器人代表队欢迎每一位有梦想、有兴趣、肯钻研、能吃苦的北邮人投身机器人大赛。
相信有了你们的加入,北邮机器人队会再创辉煌;有了你们的加入,北邮机器人队会走得更远更高!
注意事项和日程安排:
报名要求:本科生,大二大三年级、专业不限,富有责任感、自信、激情、毅力、包容、开朗,有团队精神,有创新精神,热爱机器人竞技活动,有足够的时间参与ROBOCON备战活动;有较好的机械、电子、编程等方面的基础者优先;有较强的学习能力、动手能力,有竞赛、项目实践经验的优先。
活动时间安排:
1.为防止垃圾邮件,请将邮件主题命名为《ROBOCON报名》;
2.报名表命名为:汉语院系+年级+姓名(如机械工程及自动化大三XXX);
3.请将报名表电子文档发送到邮箱:winer_yz@;
4.报名截止日期2011年9月16日24点;
5. 届时将有机器人队招新的宣讲会,请大家关注。
感谢您对北邮机器人队的关注与参与,我们将会秉承公平公正的原则进行初选,并将于9月17日进行面试。
国际赛官网:http://www.aburobocon2012.hk/
大赛规则视频:/v_show/id_XMjk5NDcyNzQ0.html
附件:2012robocon招新报名表.doc
2012robocon招新报名信息表.xls
2012年abu-robocon大学生机器人大赛英文规则上.pdf
2012年abu-robocon大学生机器人大赛英文规则下.pdf
【征集】2012机器人大赛北邮机器人代表人比赛策略
2012abu-robocon大赛已经开始备战,为了开拓思路,集思广益,北邮机器人队特此向全校同学们征集比赛方案、策略以及创意。
希望同学们能开动脑筋,积极参加,参加方式可以是个人或团队。
大赛规则详见附件。
如果您的方案、策略、创意被采用,我们将有价值数百元的奖品送出。
请将您的比赛方案按照以下规则以附件形式发送至相应邮箱地址:
1.为防止垃圾邮件,请将邮件主题命名为《ROBOT策略》;
2.报名表命名为:汉语院系+姓名(如机械工程及自动化大三XXX);
3.请将策略表电子文档发送到邮箱:winer_yz@
4.截止日期2011年10月20日24点
感谢您对北邮机器人队的关注与参与,我们将会秉承公平公正的原则进行筛选,并将每个方案进行编号并以邮件方式回复编号,对被采用的方案编号将在论坛公布,并通知本人。
附件:2012北邮机器人队策略征集表.doc。