第07章 力 力和运动
07-4第七章 运动规律 第四节 人物的表情和语言
(一) 面部表情
展现情绪最为重要的器官是眼睛、眉毛与嘴, 但有时也可以通过整张脸改变正常形状来体现情 绪的变化。
头部的结构特点 : 表情的变化来自于五官的变化、五官的变化来自于脸部肌 肉的伸缩。 结论:肌肉的变化带来面部表情的变化。但头颅是硬的, 不能随意乱变形 。
口型及心情的变化时脸部肌肉变化。
• 表现惊吓的心理状态
在现时生活中:
• 面部表情的变化和肢体语言不仅能够给对方造成 心理上的影响,也可以给自己造成心理上的影响。 • 这类动作都是在表达人物的思想、目的和欲求, 所以都带有一种表情的性质。
脸部表情和肢体动态的统一
套用了吃惊的模式但是又不雷同
同样是吃惊表情不一样的画法
其中动画2和动画4的半闭张,位置的高低处理不 同。闭眼睛要比睁眼睛快些。
发睏时的眼睛动作
几种眨眼动作的动画设计
• 正常匀速 慢眨
• 正常匀速 快眨
• 慢闭快睁
• 慢闭快睁
• 快闭慢睁
• 快闭慢睁
• 慢闭慢睁
注意:在特写镜头中
眨眼时眼球的位置可以变化,黑眼球较小的眼 睛,半闭时,上眼睑容易覆盖黑眼球的位置, 这时黑眼球的位置可稍向下或向左右移动,不 要出现感觉翻白眼的动画瞬间。
睁眼时适度调整眉毛和下眼睑的位置,以配合 睁眼动作的趋势。
3 不同情绪在眼睛动态上的反映
日常生活中,眼睛的形状会根据表情的变化而变 化。 在动画中通常要夸大这样的变化,甚至把象征性 的符号运用到眼球上,为的是让这双眼睛更加富 有戏剧性,使含义更加明确。
(二)面部形态的常用模式
动画角色的表情刻划,要从角色性格、具体情节出发,抓 住面部有代表性的结构与线条即表情线,对五官进行归纳、 概括与夸张,表达角色的面部表情与特征。动画片中角色 的表情不可能象日常生活中的表情那样细腻、 微妙,归 纳了以下几种典型的表情。
07-理论力学-第二部分运动学第七章点的合成运动

运动学/点的合成运动
动 点: AB杆上的A点 动 系: 凸轮 定 系: 地面 绝对运动: 直线 相对运动:曲线(圆弧) 牵连运动: 直线平移
1616
运动学/点的合成运动
动 点:A(在AB杆上) 动 系:偏心轮C 定 系: 地面 绝对运动:直线 相对运动:圆周(C) 牵连运动: 定轴转动
22
运动学/点的合成运动
另一方面,在实际问题中,不仅要在固联在地面上 的参考系上还要在相对于地面运动着的参考系上观察和 研究物体的运动。下面先看几个例子。
33
运动学/点的合成运动
44
55
本章将用点的合成运动的方法来研究这类问题。 66
第七章 点的合成运动
§7-1 §7-2 §7-3
§7-4
r 2
r 2
r2
l2
r2
l 2(
) 3030
运动学/点的合成运动
例4 圆盘凸轮机构
已知:OC=e ,R 3e ,(匀角速度),图示瞬时, OCCA,且O,A,B三点共线。求:从动杆AB的速度。
解:选取动点:AB 上的A点
动系:圆盘
绝对运动:直线 相对运动:圆周
由
定系:基座 va
牵连运动:定轴 ve vr
▼动点相对动系、定系必须 有运动,不能和动系在同一 物体上。
▼以上可归结为一点、两系 、三运动。
2020
运动学/点的合成运动
四、 运动方程及坐标变换 可以利用坐标变换来建立绝对、
相对和牵连运动之间的关系。
以二维问题为例。设定系 ,
动系
。动点M,如图所示。
(1)绝对运动方程: x x(t), y y(t)
大小 ? OA
人教版八年级物理下册第07章 力单元测试(基础巩固卷)

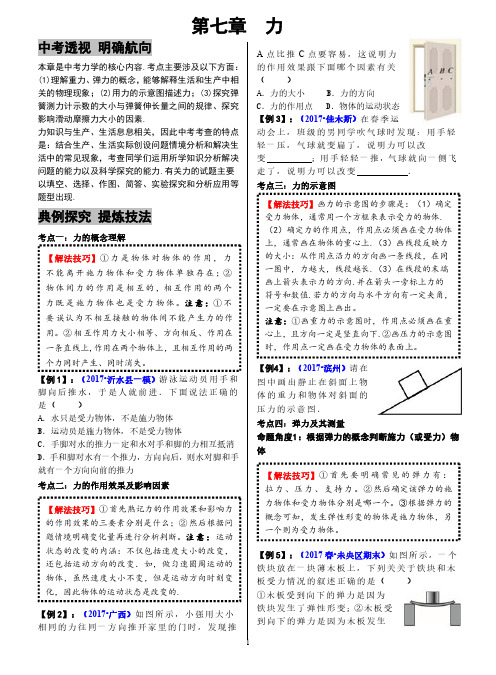
人教版八年级下册第七章《力》基础巩固卷班级:姓名:学号:分数:(考试时间:90分钟面卷分值:100分)一.选择题(共16小题,满分48分,每小题3分)1.(3分)(2019•常德)下列几种估测最符合实际情况的是()A.正常成年人的重力约600NB.人步行的速度约为5m/sC.人体感觉最舒适的温度约为50°CD.一张试卷的厚度大约1cm2.(3分)(2019•雅安)如图所示,物体A和B的重力分别为10N和6N,不计弹簧秤和细线的重力及一切摩擦,则弹簧秤的计数为()A.4N B.6N C.10N D.16N3.(3分)(2019•阜新)下列数据中,你认为最接近实际的是()A.初中生所受重力约为50N B.教室内空气的质量约为50kgC.学生在校园内步行的速度约为5m/s D.让人感觉舒适而温暖的教室内温度约为25℃4.(3分)(2019•桂林)“梅西在发任意球时,能使足球由静止绕过人墙钻入球门。
”该现象说明()A.力的作用是相互的B.力可以改变物体的形状C.力可以改变物体的运动状态D.以上说法都不对5.(3分)(2019•宜昌)在射箭运动中,以下关于力的作用效果的描述,其中一个与另外三个不同的是()A.瞄准时,手的拉力把弓拉弯B.松手后,弓的弹力把箭射出C.飞行中,重力让箭划出一道弧线D.中靶时,靶的阻力让箭停止运动6.(3分)(2019•郴州)关于重心,下列说法正确的是()A.空心的足球没有重心B.物体的重心不一定在物体上C.将质地均匀的木球的中心挖去后,木球的重心就消失了D.物体受到的力全部都作用在重心上7.(3分)(2019•湘潭)《流浪地球》电影中描述到了木星。
木星质量比地球大得多,木星对地球的引力大小为F1,地球对木星的引力大小为F2,则F1与F2的大小关系为()A.F1<F2B.F1>F2C.F1=F2D.无法确定8.(3分)(2019•扬州)以下所给数据最接近实际情况的是()A.初二物理课本重约为2.5N B.光在空气中的传播速度约为340m/sC.正常成年人脉搏跳动一次的时间约为0.1s D.人的正常体温约为40℃9.(3分)(2019•黔南州)下列物体重力最接近1N的是()A.一枚大头针B.两个鸡蛋C.一头奶牛D.一张书桌10.(3分)(2019•岳阳)下列运动场景中,能明显观察到力使物体发生形变的是()A.踢出去的足球在空中划出美丽的弧线B.跳水运动员压弯跳板C.篮球碰到篮板改变运动方向D.百米短跑运动员加速冲过终点11.(3分)(2019•天津)如图所示,人坐在小船上,在用力向前推另一艘小船时,人和自己坐的小船却向后移动。
中考物理热点命题方法技巧07专题七 力
中考透视明确航向本章是中考力学的核心内容.考点主要涉及以下方面:(1)理解重力、弹力的概念,能够解释生活和生产中相关的物理现象;(2)用力的示意图描述力;(3)探究弹簧测力计示数的大小与弹簧伸长量之间的规律、探究影响滑动摩擦力大小的因素.力知识与生产、生活息息相关,因此中考考查的特点是:结合生产、生活实际创设问题情境分析和解决生活中的常见现象,考查同学们运用所学知识分析解决问题的能力以及科学探究的能力.有关力的试题主要以填空、选择、作图、简答、实验探究和分析应用等题型出现.典例探究提炼技法考点一:力的概念理解【解法技巧】①力是物体对物体的作用,力不能离开施力物体和受力物体单独存在;②物体间力的作用是相互的,相互作用的两个力既是施力物体也是受力物体。
注意:①不要误认为不相互接触的物体间不能产生力的作用。
②相互作用力大小相等、方向相反、作用在一条直线上,作用在两个物体上,且相互作用的两个力同时产生、同时消失。
【例1】:(2017•沂水县一模)游泳运动员用手和脚向后推水,于是人就前进.下面说法正确的是()A.水只是受力物体,不是施力物体B.运动员是施力物体,不是受力物体C.手脚对水的推力一定和水对手和脚的力相互抵消D.手和脚对水有一个推力,方向向后,则水对脚和手就有一个方向向前的推力考点二:力的作用效果及影响因素【解法技巧】①首先熟记力的作用效果和影响力的作用效果的三要素分别是什么;②然后根据问题情境明确变化量再进行分析判断。
注意:运动状态的改变的内涵:不仅包括速度大小的改变,还包括运动方向的改变.如,做匀速圆周运动的物体,虽然速度大小不变,但是运动方向时刻变化,因此物体的运动状态是改变的.【例2】:(2017•广西)如图所示,小强用大小相同的力往同一方向推开家里的门时,发现推A 点比推C 点要容易,这说明力的作用效果跟下面哪个因素有关()A.力的大小B.力的方向C.力的作用点D.物体的运动状态【例3】:(2017•佳木斯)在春季运动会上,班级的男同学吹气球时发现:用手轻轻一压,气球就变扁了,说明力可以改变;用手轻轻一推,气球就向一侧飞走了,说明力可以改变.考点三:力的示意图【解法技巧】画力的示意图的步骤是:(1)确定受力物体,通常用一个方框来表示受力的物体.(2)确定力的作用点,作用点必须画在受力物体上,通常画在物体的重心上.(3)画线段反映力的大小:从作用点沿力的方向画一条线段,在同一图中,力越大,线段越长.(3)在线段的末端画上箭头表示力的方向.并在箭头一旁标上力的符号和数值.若力的方向与水平方向有一定夹角,一定要在示意图上画出。
迈达斯学习第07章结果.doc

无私分享无私分享无私分享无私分享无私分享无私分享无私分享第七章“结果”中的常见问题 (3)7.1 施工阶段分析时,自动生成的“CS:恒荷载”等的含义? (3)7.2 为什么“自动生成荷载组合”时,恒荷载组合了两次? (3)7.3 为什么“用户自定义荷载”不能参与自动生成的荷载组合? (4)7.4 为什么在自动生成的正常使用极限状态荷载组合中,汽车荷载的组合系数不是0.4或0.7? (5)7.5 为什么在没有定义边界条件的节点上出现了反力? (5)7.6 为什么相同的两个模型,在自重作用下的反力不同? (6)7.7 为什么小半径曲线梁自重作用下内侧支反力偏大? (6)7.8 为什么移动荷载分析得到的变形结果与手算结果不符? (7)7.9 为什么考虑收缩徐变后得到的拱顶变形增大数十倍? (8)7.10 为什么混凝土强度变化,对成桥阶段中荷载产生的位移没有影响? (8)7.11 为什么进行钢混叠合梁分析时,桥面板与主梁变形不协调? (9)7.12 为什么悬臂施工时,自重作用下悬臂端发生向上变形? (10)7.13 为什么使用“刚性连接”连接的两点,竖向位移相差很大? (11)7.14 为什么连续梁桥合龙后变形达上百米? (12)7.15 为什么主缆在竖直向下荷载作用下会发生上拱变形? (13)7.16 为什么索单元在自重荷载作用下转角变形不协调? (14)7.17 为什么简支梁在竖向荷载下出现了轴力? (14)7.18 为什么“移动荷载分析”时,车道所在纵梁单元的内力远大于其它纵梁单元的内力?157.19 如何在“移动荷载分析”时,查看结构同时发生的内力? (15)7.20 空心板梁用单梁和梁格分析结果相差15%? (17)7.21 为什么徐变产生的结构内力比经验值大上百倍? (17)7.22 如何查看板单元任意剖断面的内力图? (18)7.23 为什么相同荷载作用下,不同厚度板单元的内力结果不一样? (19)7.24 为什么无法查看“板单元节点平均内力”? (21)7.25 如何一次抓取多个施工阶段的内力图形? (21)7.26 如何调整内力图形中数值的显示精度和角度? (22)7.27 为什么在城-A车道荷载作用下,“梁单元组合应力”与“梁单元应力PSC”不等?257.28 为什么“梁单元组合应力”不等于各分项正应力之和? (25)7.29 为什么连续梁在整体升温作用下,跨中梁顶出现压应力? (25)7.30 为什么PSC截面应力与PSC设计结果的截面应力不一致? (26)7.31 为什么“梁单元应力PSC”结果不为零,而“梁单元应力”结果为零? (26)7.32 如何仅显示超过某个应力水平的杆件的应力图形? (27)7.33 为什么“水化热分析”得到的地基温度小于初始温度? (29)7.34 “梁单元细部分析”能否查看局部应力集中? (30)7.35 为什么修改自重系数对“特征值分析”结果没有影响? (30)7.36 为什么截面偏心会影响特征值计算结果? (31)7.37 为什么“特征值分析”没有扭转模态结果? (32)7.38 “屈曲分析”时,临界荷载系数出现负值的含义? (32)7.39 “移动荷载分析”后自动生成的MVmax、MVmin、MVall工况的含义? (33)7.40 为什么“移动荷载分析”结果没有考虑冲击作用? (33)7.41 如何得到跨中发生最大变形时,移动荷载的布置情况? (34)7.42 为什么选择影响线加载时,影响线的正区和负区还会同时作用有移动荷载?357.43 为什么移动荷载分析得到的结果与等效静力荷载分析得到结果不同? (35)7.44 如何求解斜拉桥的最佳初始索力? (36)7.45 为什么求斜拉桥成桥索力时,“未知荷载系数”会出现负值? (38)7.46 为什么定义“悬臂法预拱度控制”时,提示“主梁结构组出错”? (38)7.47 如何在预拱度计算中考虑活载效应? (38)7.48 桥梁内力图中的应力、“梁单元应力”、“梁单元应力PSC”的含义? (39)7.49 由“桥梁内力图”得到的截面应力的文本结果,各项应力结果的含义? (40)7.50 为什么定义查看“结果>桥梁内力图”时,提示“设置桥梁主梁单元组时发生错误!”? (41)7.51 为什么无法查看“桥梁内力图”? (41)7.52 施工阶段分析完成后,自动生成的“POST:CS”的含义? (42)7.53 为什么没有预应力的分析结果? (42)7.54 如何查看“弹性连接”的内力? (44)7.55 为什么混凝土弹性变形引起的预应力损失为正值? (44)7.56 如何查看预应力损失分项结果? (45)7.57 为什么定义了“施工阶段联合截面”后,无法查看“梁单元应力”图形? . 46 7.58 为什么拱桥计算中出现奇异警告信息? (47)7.59 如何在程序关闭后,查询“分析信息”的内容? (48)第七章“结果”中的常见问题7.1施工阶段分析时,自动生成的“CS:恒荷载”等的含义?具体问题进行施工阶段分析,程序会自动生成CS:恒荷载、CS:施工荷载、CS:收缩一次、CS:收缩二次、CS:徐变一次、CS:徐变二次、CS:钢束一次、CS:钢束二次、CS:合计,这些荷载工况各代表什么含义?在结果查看时有哪些注意事项?相关命令——问题解答MIDAS在进行施工阶段分析时,自动将所有施工阶段作用的荷载组合成一个荷载工况“CS:恒荷载”;如果想查看某个或某几个施工阶段恒荷载的效应,可以将这些荷载工况从“CS:恒荷载”分离出来,生成荷载工况“CS:施工荷载”;钢束预应力、收缩徐变所产生的直接效应程序自动生成荷载工况“CS:钢束一次”、“CS:收缩一次”、“CS:徐变一次”,由于结构超静定引起的钢束预应力二次效应、收缩徐变二次效应,程序自动生成荷载工况“CS:钢束二次”、“CS:收缩二次”、“CS:徐变二次”;“CS:合计”表示所有施工荷载的效应。
07第7章 三相异步电动机的基本工作原理和结构

第2篇 三相异步电动机交流电机可分为异步电机和同步电机两大类。
异步电机主要用作电动机,将交流电能转换为机械能,去拖动各种生产机械。
异步电动机有三相的,也有单相的。
现代各种生产机械大都采用三相异步电动机来驱动。
例如,在发电厂中,水泵、风机、球磨机等锅炉和汽机的附属设备大多采用三相异步电动机来驱动。
在工业生产中,各种金属切削机床、起重机、锻压机、传送带等生产机械也都广泛采用三相异步电动机来驱动。
而单相异步电动机常用于功率不大的电动工具、家用电器、医疗器械、农用机械等各种轻型电动设备中。
异步电动机所以能得到这样广泛的应用,是由于它具有结构简单、制造容易、运行可靠、价格较低以及效率较高等优点。
但是,它也具有调速性能较差和功率因数较低等缺点。
本篇重点研究三相异步电动机的基本工作原理及结构、交流绕组及其电动势和磁动势、三相异步电动机的基本理论和基本性能,最后对单相异步电动机作简单介绍。
第7章 三相异步电动机的基本工作原理和结构[内容]本章首先介绍三相异步电动机的基本结构,然后分析三相异步电动机的基本工作原理,并重点讲述转差率的概念及异步电机的三种运行状态,最后介绍异步电动机的铭牌和主要系列。
[要求]● 掌握三相异步电动机的基本结构、笼型转子和绕线转子的结构特点。
● 掌握三相异步电动机的基本工作原理、转差率的概念及三种运行状态。
● 掌握三相异步电动机的额定值,了解三相异步电动机的主要系列。
7.1三相异步电动机的基本结构异步电动机的结构如图7.1.1所示,它主要由定子和转子两大部分组成。
转子装在定子腔内,定、转子之间有一缝隙,称为气隙。
图7.1.1 笼型异步电动机的构造一、定子部分定子部分主要由定子铁心、定子绕组和机座三部分组成。
定子铁心是电机磁路的一部分。
为减少铁心损耗,一般用导磁性能良好的0.5 mm厚的硅钢片叠成,并压装在机座内,如图7.1.2(a)所示。
定子铁心叠片的内圆周冲有嵌放绕组的槽,故又称为冲片。
高中物理第07章能量守恒 微型专题能力突破 17(利用动能定理分析变力做功和多过程问题)

高中物理第07章能量守恒 微型专题能力突破 17利用动能定理分析变力做功与多过程问题 Lex Li一、利用动能定理求变力的功1.动能定理不仅适用于求恒力做的功,也适用于求变力做的功,同时因为不涉及变力作用的过程分析,应用非常方便.2.利用动能定理求变力的功是最常用的方法,当物体受到一个变力和几个恒力作用时,可以用动能定理间接求变力做的功,即W 变+W 其他=ΔE k .【例1】 如图所示,质量为m 的小球自由下落d 后,沿竖直面内的固定轨道ABC 运动,AB是半径为d 的14光滑圆弧,BC 是直径为d 的粗糙半圆弧(B 是轨道的最低点).小球恰能通过圆弧轨道的最高点C .重力加速度为g ,求:(1)小球运动到B 处时对轨道的压力大小;(2)小球在BC 运动过程中,摩擦力对小球做的功.B 至C 的过程中摩擦力为变力(大小方向都变),求变力的功不能直接根据功的公式,通常用动能定理求解.针对训练1 如图所示,一半径为R 的半圆形轨道竖直固定放置,轨道两端等高;质量为m的质点自轨道端点P 由静止开始滑下,滑到最低点Q 时,对轨道的正压力为2mg ,重力加速度大小为g .质点自P 滑到Q 的过程中,克服摩擦力所做的功为 ( )A.14mgRB.13mgRC.12mgRD.π4mgR二、利用动能定理分析多过程问题一个物体的运动如果包含多个运动阶段,可以选择分段或全程应用动能定理.(1)分段应用动能定理时,将复杂的过程分割成一个个子过程,对每个子过程的做功情况和初、末动能进行分析,然后针对每个子过程应用动能定理列式,然后联立求解.(2)全程应用动能定理时,分析整个过程中出现过的各力的做功情况,分析每个力做的功,确定整个过程中合外力做的总功,然后确定整个过程的初、末动能,针对整个过程利用动能定理列式求解.当题目不涉及中间量时,选择全程应用动能定理更简单,更方便.注意:当物体运动过程中涉及多个力做功时,各力对应的位移可能不相同,计算各力做功时,应注意各力对应的位移.计算总功时,应计算整个过程中出现过的各力做功的代数和.【例2】如图所示,右端连有一个光滑弧形槽的水平桌面AB长L=1.5 m,一个质量为m =0.5 kg的木块在F=1.5 N的水平拉力作用下,从桌面上的A端由静止开始向右运动,木块到达B端时撤去拉力F,木块与水平桌面间的动摩擦因数μ=0.2,取g=10 m/s2.求:(1)木块沿弧形槽上升的最大高度(木块未离开弧形槽);(2)木块沿弧形槽滑回B端后,在水平桌面上滑行的最大距离.针对训练2如图所示,质量m=1 kg的木块静止在高h=1.2 m的平台上,木块与平台间的动摩擦因数μ=0.2,用水平推力F=20 N,使木块产生位移l1=3 m时撤去,木块又滑行l2=1 m后飞出平台,求木块落地时速度的大小.(g取10 m/s2)三、动能定理在平抛、圆周运动中的应用动能定理常与平抛运动、圆周运动相结合,解决这类问题要特别注意:(1)与平抛运动相结合时,要注意应用运动的合成与分解的方法,如分解位移或分解速度求平抛运动的有关物理量.(2)与竖直平面内的圆周运动相结合时,应特别注意隐藏的临界条件:①有支撑效果的竖直平面内的圆周运动,物体能通过最高点的临界条件为v min=0.②没有支撑效果的竖直平面内的圆周运动,物体能通过最高点的临界条件为v min=gR.【例3】如图所示,一可以看成质点的质量m=2 kg的小球以初速度v0沿光滑的水平桌面飞出后,恰好从A点沿切线方向进入圆弧轨道,BC为圆弧竖直直径,其中B为轨道的最低点,C为最高点且与水平桌面等高,圆弧AB对应的圆心角θ=53°,轨道半径R=0.5 m.已知sin 53°=0.8,cos 53°=0.6,不计空气阻力,g取10 m/s2.(1)求小球的初速度v的大小;(2)若小球恰好能通过最高点C,求在圆弧轨道上摩擦力对小球做的功.四、动能定理在多过程往复运动中的应用【例4】某游乐场滑梯可以简化为如图所示竖直面内的ABCD轨道,AB为长L=6 m、倾角α=37°的斜轨道,BC为水平轨道,CD为半径R=15 m、圆心角β=37°的圆弧轨道,轨道AB段粗糙,其余各段均光滑.一小孩(可视为质点)从A点以初速度v0=2 3 m/s下滑,沿轨道运动到D点时速度恰好为零(不计经过B点时的能量损失).已知该小孩的质量m=30 kg,取sin 37°=0.6,cos 37°=0.8,g=10 m/s2,不计空气阻力,设最大静摩擦力等于滑动摩擦力,求:(1)该小孩第一次经过圆弧轨道C点时,对圆弧轨道的压力;(2)该小孩与AB段的动摩擦因数;(3)该小孩在轨道AB上运动的总路程s.4.1.在含有摩擦力的往复运动过程中,注意两种力做功的区别:(1)重力做功只与初末位置有关,而与路径无关;(2)滑动摩擦力(或全部阻力)做功与路径有关,克服摩擦力(或全部阻力)做的功W =fs(s 为路程).4.2.由于动能定理解题的优越性,求多过程往复运动问题中的路程,一般应用动能定理.01.(用动能定理求变力的功)如图所示,质量为m 的物体与水平转台间的动摩擦因数为μ,物体与转轴相距R ,物体随转台由静止开始转动.当转速增至某一值时,物体即将在转台上滑动,此时转台开始匀速转动.设物体的最大静摩擦力近似等于滑动摩擦力,则在整个过程中摩擦力对物体做的功是 ( )A.0B.2μmgRC.2πμmgRD.μmgR 202.(用动能定理求变力的功)质量为m 的物体以初速度v 0沿水平面向左开始运动,起始点A 与一轻弹簧O 端相距s ,如图所示.已知物体与水平面间动摩擦因数为μ,物体与弹簧相碰后,弹簧的最大压缩量为x ,则从开始碰撞到弹簧被压缩至最短,物体克服弹簧弹力做的功为( )A.12mv 02-μmg (s +x )B.12mv 02-μmgxC.μmgsD.μmg (s +x )03.(利用动能定理分析多过程往复运动问题)如图所示,ABCD 为一竖直平面内的轨道,其中BC 水平,A 点比BC 高出10 m ,BC 长1 m ,AB 和CD 轨道光滑.一质量为1 kg 的物体,从A点以4 m/s 的速度开始运动,经过BC 后滑到高出C 点10.3 m 的D 点速度为0.求:(g 取10 m/s 2)(1)物体与BC 轨道间的动摩擦因数;(2)物体第5次经过B 点时的速度;(3)物体最后停止的位置(距B 点多少米).04.(动能定理在平抛、圆周运动中的应用)如图10所示,一个质量为m =0.6 kg 的小球以初速度v 0=2 m/s 从P 点水平抛出,从粗糙圆弧ABC 的A 点沿切线方向进入(不计空气阻力,进入圆弧时无动能损失)且恰好沿圆弧通过最高点C ,已知圆弧的圆心为O ,半径R =0.3 m ,θ=60°,g =10 m/s 2.求:(1)小球到达A 点的速度v A 的大小;(2)P 点到A 点的竖直高度H ;(3)小球从圆弧A 点运动到最高点C 的过程中克服摩擦力所做的功W .一、选择题考点一 利用动能定理求变力的功01.在离地面高为h 处竖直上抛一质量为m 的物块,抛出时的速度为v 0,当它落到地面时速度为v ,用g 表示重力加速度,则在此过程中物块克服空气阻力所做的功等于 ( )A.mgh -12mv 2-12mv 02B.12mv 2-12mv 02-mghC.mgh +12mv 02-12mv 2D.mgh +12mv 2-12mv 0202.如图所示,AB 为四分之一圆弧轨道,BC 为水平直轨道,圆弧的半径为R ,BC 的长度也是R .一质量为m 的物体,与两个轨道间的动摩擦因数都为μ,它由轨道顶端A 从静止开始下滑,恰好运动到C 处停止,不计空气阻力,那么物体在AB 段克服摩擦力所做的功为 ( )A.12μmgRB.12mgRC.mgRD.(1-μ)mgR03.一质量为m 的小球,用长为l 的轻绳悬挂于O 点,小球在水平拉力F 作用下,从平衡位置P 点很缓慢地移动到Q 点,如图所示,则拉力F 所做的功为 ( )A.mgl cos θB.mgl (1-cos θ)C.Fl cos θD.Fl sin θ04.如图所示,一木块沿竖直放置的粗糙曲面从高处滑下,当它滑过A 点的速度大小为5 m/s时,滑到B 点的速度大小也为5 m/s.若使它滑过A 点的速度大小变为7 m/s ,则它滑到B 点的速度大小为( )A.大于7 m/sB.等于7 m/sC.小于7 m/sD.无法确定05.质量为m 的小球被系在轻绳一端,在竖直平面内做半径为R 的圆周运动,如图所示,运动过程中小球受到空气阻力的作用.设某一时刻小球通过轨道的最低点,此时绳子的张力为7mg ,在此后小球继续做圆周运动,经过半个圆周恰好能通过最高点,则在此过程中小球克服空气阻力所做的功是( )A.14mgRB.13mgRC.12mgRD.mgR06.(多选)如图所示,某中学科技小组制作的利用太阳能驱动小车的装置.当太阳光照射到小车上方的光电板,光电板中产生的电流经电动机带动小车前进.若太阳光照射到小车上方的光电板,小车在平直的水泥路上从静止开始加速行驶,经过时间t 前进距离s ,速度达到最大值v m ,设这一过程中电动机的功率恒为P ,小车所受阻力恒为F ,那么 ( )A.这段时间内电动机所做的功为PtB.这段时间内小车先加速运动,然后匀速运动C.这段时间内电动机所做的功为12mv m 2+FsD.这段时间内电动机所做的功为12mv m 2考点二 利用动能定理分析多过程问题07.(多选)在平直公路上,汽车由静止开始做匀加速直线运动,当速度达到v max 后,立即关闭发动机直至静止,v -t 图象如图所示,设汽车的牵引力为F ,受到的摩擦力为f ,全过程中牵引力做功为W 1,克服摩擦力做功为W 2,则 ( )A.F ∶f =1∶3B.W 1∶W 2=1∶1C.F ∶f =4∶1D.W 1∶W 2=1∶308.如图所示,一薄木板斜搁在高度一定的平台和水平地板上,其顶端与平台相平,末端置于地板的P处,并与地板平滑连接.将一可看成质点的滑块自木板顶端无初速度释放,沿木板下滑,接着在地板上滑动,最终停在Q处.滑块和木板及地板之间的动摩擦因数相同.现将木板截短一半,仍按上述方式搁在该平台和水平地板上,再次将滑块自木板顶端无初速度释放(设滑块在木板和地面接触处平滑过渡),则滑块最终将停在()A.P处B.P、Q之间C.Q处D.Q的右侧09.(多选)如图所示为一滑草场.某条滑道由上、下两段高均为h,与水平面倾角分别为45°和37°的滑道组成,滑草车与草地之间的动摩擦因数为μ.质量为m的载人滑草车从坡顶由静止开始下滑,经过上、下两段滑道后,最后恰好静止于滑道的底端(不计滑草车在两段滑道交接处的能量损失,sin 37°=0.6,cos 37°=0.8).则()A.动摩擦因数μ=67B.载人滑草车最大速度为2gh 7C.载人滑草克服摩擦力做功为mghD.载人滑草车在下段滑道上的加速度大小为3 5g二、非选择题10.(应用动能定理分析多过程问题)如图所示,自然伸长的轻弹簧左端固定在竖直墙上,右端在O位置,质量为m的物块A(可视为质点)以初速度v0从距O点x0的P点处向左运动,与弹簧接触后压缩弹簧,将弹簧右端压到O′点位置后,A又被弹簧弹回.A离开弹簧后,恰好回到P点,物块A与水平面间的动摩擦因数为μ,重力加速度为g.(1)求物块A从P点出发又回到P点的过程中,克服摩擦力所做的功.(2)求O点和O′点间的距离x1.11.(应用动能定理分析多过程问题)如图所示,光滑水平面AB与一半圆形轨道在B点平滑连接,轨道位于竖直面内,其半径为R,一个质量为m的物块静止在水平面上,现向左推物块使其压紧弹簧,然后放手,物块在弹力作用下获得一速度,当它经B点进入半圆形轨道瞬间,对轨道的压力为其重力的7倍,之后向上运动恰能完成半圆周运动到达C点,重力加速度为g.求:(1)弹簧弹力对物块做的功;(2)物块从B到C克服阻力所做的功;(3)物块离开C点后,再落回到水平面上时的动能.12.(应用动能定理分析多过程问题)如图所示,光滑斜面AB的倾角θ=53°,BC为水平面,BC长度l BC=1.1 m,CD为光滑的14圆弧,半径R=0.6 m.一个质量m=2 kg的物体,从斜面上A点由静止开始下滑,物体与水平面BC间的动摩擦因数μ=0.2,轨道在B、C两点平滑连接.当物体到达D点时,继续竖直向上运动,最高点距离D点的高度h=0.2 m.不计空气阻力,sin 53°=0.8,cos 53°=0.6,g取10 m/s2.求:(1)物体运动到C点时的速度大小v C;(2)A点距离水平面的高度H;(3)物体最终停止的位置到C点的距离s.01.(应用动能定理分析多过程问题)如图所示,某次飞行表演中,飞行员驾驶飞机在竖直面内做半径为R的圆周运动,在最高点时飞行员头朝下,已知飞行员质量为m、重力加速度为g.(1)若飞行员在最高点座椅对他的弹力和飞机在地面上起飞前一样,求最高点的速度;(2)若这位飞行员以(1)中的速度从最高点加速飞到最低点,且他在最低点能承受的最大竖直加速度为5g,求飞机在最低点的最大速度及这个过程中飞机对飞行员做的功.02.(应用动能定理分析多过程问题)如图所示是一种常见的圆桌,桌面中间嵌一半径为r=1.5 m、可绕中心轴转动的圆盘,桌面与圆盘面在同一水平面内且两者间缝隙可不考虑.已知桌面离地高度为h=0.8 m,将一可视为质点的小碟子放置在圆盘边缘,若缓慢增大圆盘的角速度,碟子将从圆盘上甩出并滑上桌面,再从桌面飞出,落地点与桌面飞出点的水平距离是0.4 m.已知碟子质量m=0.1 kg,碟子与圆盘间的最大静摩擦力f max=0.6 N,g取10 m/s2,求:(不计空气阻力)(1)碟子从桌面飞出时的速度大小;(2)碟子在桌面上运动时,桌面摩擦力对它做的功;(3)若碟子与桌面动摩擦因数为μ=0.225,要使碟子不滑出桌面,则桌面半径至少是多少?03.(应用动能定理分析多过程问题)如图所示为一遥控电动赛车(可视为质点)和它的运动轨道示意图.假设在某次演示中,赛车从A位置由静止开始运动,经2 s后关闭电动机,赛车继续前进至B点后水平飞出,赛车能从C点无碰撞地进入竖直平面内的圆形光滑轨道,D点和E 点分别为圆形轨道的最高点和最低点.已知赛车在水平轨道AB段运动时受到的恒定阻力为0.4 N,赛车质量为0.4 kg,通电时赛车电动机的输出功率恒为2 W,B、C两点间高度差为0.45 m,C与圆心O的连线和竖直方向的夹角α=37°,空气阻力忽略不计,sin 37°=0.6,cos 37°=0.8,g=10 m/s2,求:(1)赛车通过C点时的速度大小;(2)赛道AB的长度;(3)要使赛车能通过圆轨道最高点D后回到水平赛道EG,其半径需要满足什么条件?04.(应用动能定理分析多过程问题)如图所示,在竖直平面内,长为L、倾角θ=37°的粗糙斜面AB下端与半径R=1 m的光滑圆弧轨道BCDE平滑相接于B点,C点是轨迹最低点,D点与圆心O等高.现有一质量m=0.1 kg的小物体从斜面AB上端的A点无初速度下滑,恰能到达圆弧轨道的D点.若物体与斜面之间的动摩擦因数μ=0.25,不计空气阻力,g取10 m/s2,sin 37°=0.6,cos 37°=0.8,求:(1)斜面AB的长度L;(2)物体第一次通过C点时的速度大小v C1;(3)物体经过C点时,轨道对它的最小支持力N min;(4)物体在粗糙斜面AB上滑行的总路程s总.高中物理第07章能量守恒微型专题能力突破 17 利用动能定理分析变力做功与多过程问题Lex Li 【例1】(1)5mg(2)-34mgd解析(1)小球运动到B点的过程由动能定理得2mgd=12mv2,在B点:N-mg=mv2d,得:N=5mg,根据牛顿第三定律:小球在B处对轨道的压力N′=N=5mg.(2)小球恰好通过C点,则mg=mv C2d2.小球从B运动到C的过程:-mgd+W f=12mv C2-12mv2,得Wf=-34mgd.针对训练1 C解析质点经过Q点时,由重力和轨道支持力的合力提供向心力,由牛顿第二定律得N -mg=mv Q2R,由题意及牛顿第三定律知N=2mg,可得v Q=gR,质点自P滑到Q的过程中,由动能定理得mgR-W f=12mv Q2,得克服摩擦力所做的功为Wf=12mgR,选项C正确.【例2】(1)0.15 m(2)0.75 m解析(1)设木块沿弧形槽上升的最大高度为h,木块在最高点时的速度为零.从木块开始运动到沿弧形槽上升到最大高度处,由动能定理得:FL-fL-mgh=0其中f=μN=μmg=0.2×0.5×10 N=1.0 N所以h=FL-F f Lmg =-0.5×10m=0.15 m(2)设木块离开B点后沿桌面滑行的最大距离为x.由动能定理得:mgh-fx=0所以:x=mghF f=0.5×10×0.151.0m=0.75 m针对训练211.3 m/s解析解法一取木块为研究对象,其运动分三个过程,先匀加速前进l1,后匀减速前进l2,再做平抛运动,对每一过程,分别由动能定理得:Fl1-μmgl1=12mv12 -μmgl2=12mv22-12mv12 mgh=12mv32-12mv22 解得v3≈11.3 m/s 解法二对全过程由动能定理得:Fl1-μmg(l1+l2)+mgh=12mv2-0代入数据解得v≈11.3 m/s【例3】 (1)3 m/s (2)-4 J解析 (1)在A 点由平抛运动规律得:v A =v 0cos 53°=53v 0. ①小球由桌面到A 点的过程中,由动能定理得:mg (R +R cos θ)=12mv A 2-12mv 02 ②由①②得:v 0=3 m/s.(2)若小球恰好通过最高点C ,在最高点C 处有mg =mv C 2R ,小球从桌面运动到C 点的过程中,由动能定理得:W f =12mv C 2-12mv 02,代入数据解得W f =-4 J.【例4】 (1)420 N ,方向向下 (2)0.25 (3)21 m解析 (1)由C 到D 速度减为0,由动能定理可得:-mg (R -R cos 37°)=0-12mv C 2,v C =215 m/s在C 点,由牛顿第二定律得:N -mg =m v C 2R ,N =420 N根据牛顿第三定律,小孩对轨道的压力为420 N ,方向向下(2)小孩从A 运动到D 的过程中,由动能定理得:mgL sin α-μmgL cos α-mgR (1-cos β)=0-12mv 02 可得:μ=0.25(3)在AB 斜轨上,μmg cos α<mg sin α,小孩不能静止在斜轨上,则小孩从A 点以初速度v 0滑下,最后静止在BC 轨道B 处.由动能定理:mgL sin α-μmgs cos α=0-12mv 02 解得s =21 m.01.D 物体即将在转台上滑动但还未滑动时,转台对物体的最大静摩擦力恰好提供向心力,设此时物体做圆周运动的线速度为v ,则有μmg =mv 2R .①在物体由静止到获得速度v 的过程中,物体受到的重力和支持力不做功,只有摩擦力对物体做功,由动能定理得:W =12mv 2-0.② 联立①②解得W =12μmgR . 02.A 由动能定理得-W -μmg (s +x )=0-12mv 02,W =12mv 02-μmg (s +x ).03.(1)0.5 (2)13.3 m/s (3)距B 点0.4 m解析 (1)由动能定理得:-mg (h -H )-μmgs BC =0-12mv 12,解得μ=0.5.(2)物体第5次经过B 点时,物体在BC 上滑动了4次,由动能定理得:mgH -μmg ·4s BC =12mv 22-12mv 12,解得v 2=411 m/s≈13.3 m/s.(3)分析整个过程,由动能定理得:mgH -μmgs =0-12mv 12,解得s =21.6 m.所以物体在轨道上来回运动了10次后,还有1.6 m ,故最后停止的位置与B 点的距离为2 m -1.6 m =0.4 m.04.(1)4 m/s (2)0.6 m (3)1.2 J解析 (1)在A 点由速度的合成得v A =v 0cos θ,代入数据解得v A =4 m/s(2)从P 点到A 点小球做平抛运动,竖直分速度v y =v 0tan θ由运动学规律有v y 2=2gH 解得H =0.6 m(3)恰好过C 点满足mg =mv C 2R由A 点到C 点由动能定理得:-mgR (1+cos θ)-W =12mv C 2-12mv A 2 代入数据解得W =1.2 J.01.C 选取物块从刚抛出到落地时的过程,由动能定理可得:mgh -W f 克=12mv 2-12mv 02解得:W f 克=mgh +12mv 02-12mv 2.02.D 设物体在AB 段克服摩擦力所做的功为W AB ,对物体从A 到C 的全过程,由动能定理得mgR -W AB -μmgR =0,故W AB =mgR -μmgR =(1-μ)mgR .03.B 小球缓慢移动,时时都处于平衡状态,由平衡条件可知,F =mg tan θ,随着θ的增大,F 也在增大,是一个变化的力,不能直接用功的公式求它所做的功,所以这道题要考虑用动能定理求解.由于物体缓慢移动,动能保持不变,由动能定理得:-mgl (1-cos θ)+W =0,所以W =mgl (1-cos θ).04.C 第一次从A 点到B 点的过程中:mgh -W f1=ΔE k =0,W f1=mgh ,第二次速度增大,木块对轨道的压力增大,W f2>W f1,故mgh -W f2<0,B 点动能小于A 点动能,C 正确.05.C 小球通过最低点时,设绳的张力为T ,则:T -mg =m v 12R ,6mg =m v 12R ①,小球恰好过最高点,绳子拉力为零,这时mg =m v 22R ②,小球从最低点运动到最高点的过程中,由动能定理得:-mg ·2R -W f =12mv 22-12mv 12③,由①②③式联立解得W f =12mgR ,选C.06.AC 根据W =Pt 知,这段时间内电动机所做的功为Pt ,故A 正确;电动机的功率不变,速度增大,则牵引力减小,加速度减小,先做加速度减小的加速运动,当加速度减为零后,做匀速直线运动,而在t 时间内做加速运动,故B 错误;根据动能定理得,W -Fs =12mv m 2,则这段时间内电动机做的功W =Fs +12mv m 2,故C 正确,D 错误.07.BC 对汽车运动的全过程,由动能定理得:W 1-W 2=ΔE k =0,所以W 1=W 2,选项B 正确,D 错误;由动能定理得Fx 1-fx 2=0,由图象知x 1∶x 2=1∶4.所以F ∶f =4∶1,选项A 错误,C 正确.08.C09.AB 根据动能定理有2mgh -W f =0,即2mgh -μmg cos 45°·h sin 45°-μmg cos 37°·h sin 37°=0,得动摩擦因数μ=67,则A 项正确;载人滑草车克服摩擦力做的功为W f =2mgh ,则C项错误;载人滑草车在上、下两段的加速度分别为a 1=g (sin 45°-μcos 45°)=214g ,a 2=g (sin 37°-μcos 37°)=-335g ,则载人滑草车在上、下两段滑道上分别做加速运动和减速运动,因此在上段滑道底端时达到最大速度v ,由运动学公式有2a 1h sin 45°=v 2得,v =2a 1h sin 45°=27gh ,故B 项正确,D 项错误.10.(1)12mv 02 (2)v 024μg-x 0 解析 (1)A 从P 开始运动,最后回到P 的过程,根据动能定理得:摩擦力所做的功为:W f =0-12mv 02=-12mv 02,即克服摩擦力做功为12mv 02.(2)A 从P 开始运动,最后回到P 的全过程,根据动能定理,有:-2μmg (x 1+x 0)=0-12mv 02,得x 1=v 024μg -x 0. 11.(1)3mgR (2)12mgR (3)52mgR 解析 (1)由动能定理得W =12mv B 2在B 点由牛顿第二定律得7mg -mg =m v B 2R 解得W =3mgR(2)物块从B 到C 由动能定理得:-2mgR +W ′=12mv C 2-12mv B 2物块在C 点时mg =m v C 2R 解得W ′=-12mgR ,即物块从B 到C 克服阻力做功为12mgR . (3)物块从C 点平抛到水平面的过程中,由动能定理得:2mgR =E k -12mv C 2,解得E k =52mgR .12.(1)4 m/s (2)1.02 m (3)0.4 m解析 (1)物体由C 点运动到最高点,根据动能定理得:-mg (h +R )=0-12mv C 2代入数据解得:v C =4 m/s(2)物体由A 点运动到C 点,根据动能定理得:mgH -μmgl BC =12mv C 2-0 代入数据解得:H =1.02 m(3)从物体开始下滑到停下,根据动能定理得:mgH -μmgs 1=0 代入数据,解得s 1=5.1 m由于s 1=4l BC +0.7 m所以,物体最终停止的位置到C 点的距离为:s =0.4 m.01.(1)2gR (2)5gR -12mgR 解析 (1)最高点座椅对飞行员的弹力N =mg由重力和弹力的合力提供向心力N +mg =mv 12R ,v 1=2gR(2)最低点向心加速度最大时速度也最大,a n =mv 22R =5g ,速度最大为v 2=5gR对最高点到最低点的过程运用动能定理,有mg ×2R +W =12mv 22-12mv 12,解得W =-12mgR .02. (1)1 m/s (2)-0.4 J (3)2.5 m解析 (1)根据平抛运动规律:h =12gt 2,x =vt , 得v =x g 2h =1 m/s.(2)碟子从圆盘上甩出时的速度为v 0,则f max =m v 02r ,即v 0=3 m/s由动能定理得:W f =12mv 2-12mv 02,代入数据得:W f =-0.4 J.(3)当碟子滑到桌面边缘时速度恰好减为零,对应的桌子半径取最小值.设碟子在桌子上滑动的位移为x ′,根据动能定理:-μmgx ′=0-12mv 02代入数据得:x ′=2 m 由几何知识可得桌子半径的最小值为:R =r 2+x ′2=2.5 m.03.(1)5 m/s (2)2 m (3)R ≤2546m 解析 (1)赛车在BC 间做平抛运动,则v y =2gh =3 m/s由图可知:v C =v y sin 37°=5 m/s(2)由(1)可知B 点速度v 0=v C cos 37°=4 m/s则根据动能定理:Pt -fl AB =12mv 02, 解得l AB =2 m.(3)当恰好通过最高点D 时,有:mg =m v D 2R从C 到D ,由动能定理可知:-mgR (1+cos 37°)=12mv D 2-12mv C 2,解得R =2546 m所以轨道半径R ≤2546 m.04.(1)2 m (2)2 5 m/s (3)1.4 N (4)6 m解析 (1)A 到D 过程,根据动能定理有:mg (L sin θ-R cos θ)-μmgL cos θ=0,解得:L =2 m ;(2)A 到C 过程,根据动能定理有:mg (L sin θ+R -R cos θ)-μmgL cos θ=12mv C 12, 解得:v C 1=2 5 m/s ;(3)物体经过C 点,轨道对它有最小支持力时,它将在B 点所处高度以下运动,所以有:mg (R -R cos θ)=12mv min 2根据向心力公式有:N min -mg =m v min2R,解得N min =1.4 N ; (4)根据动能定理有:mgL sin θ-μmgs 总cos θ=0,解得s 总=6 m.。
材料力学第07章_受压杆件的稳定性设计概要

Fcr
F
丝杆
图7-8 千斤顶
(7-2)
对于图7-7(c)所示两端固定的压杆,失稳后 的挠曲线形状关于杆件的中间截面对称,根据杆 件弯曲变形的特点,可知距离上下端点四分之一 杆长处的两点为挠曲线的拐点,其弯矩为零,相 当于铰链,故两端固定长为l的压杆的临界压力与 一长为0.5l 的铰支压杆的临界压力相等,则有
工程实际中,有许多受压杆件。如汽车起重机起重臂的 支承杆(图7.1),在起吊重物时,该支承杆就受到压力作 用。再如,建筑工地上所使用的脚手架(图7.2),可以简 化为桁架结构,其中大部分竖杆要承受压力作用。同样,机 床丝杠、起重螺旋(千斤顶)、各种受压杆件在压力作用下 都有可能存在丧失稳定而失效的问题。
2 EI 2 10 109 9.72 106 1012 Fcr 60kN 2 2 ( l ) (2 2)
(2)计算②情况下的临界压力,截面对y,z 轴的惯性矩相 等,均为
hb3 120 1203 I y Iz 1.728 107 mm 4 12 12
w
A Fcr
x
l
B Fcr
x
Fcr
F M(x)
图7-8 两端铰支细长压杆
选取如图所示坐标系xAw。 A 设距原点为x距离的任意截面的 Fcr 挠度为w,弯矩M的绝对值为 Fw。若挠度w为负时,M为正。 Fcr 即M与w的符号相反,于是有
w
l
B Fcr
x
x
F M(x)
两端铰支细长压杆
M ( x) Fw 图7-6 将其代入挠曲线近似微分方程,得 EIw M ( x) Fw
如果D=0,则有w≡0,即压杆各截面的挠度均为零,杆仍然保 持直线状态,这与压杆处于微弯状态的假设前提相矛盾。因 此D≠0 ,则只有 sin kl 0 (n 0,1, 2,3, ) 满足上式的kl值为 kl n n 所以 k , 于是,杆件所受的压力为 2 2 l n EI (n 0,1, 2,3, ) F k 2 EI l2 由上式可以看出,使压杆保持曲线形状平衡的压力值,在理 论上是多值的。但实际上,只有使杆件保持微小弯曲得最小 压力才是临界压力。显然只有取n =1才有实际意义,于是可 得临界压力为 2 EI Fcr 2 (7-1) l
《力学》漆安慎答案07章
力学(第二版)漆安慎习题解答第七章刚体力学第七章刚体力学一、基本知识小结1.刚体的质心定义:r c m i r i/ m r c rdm/ dm求质心方法:对称分析法,分割法,积分法。
2.刚体对轴的转动惯量定义:I m i r i2I r2dm平行轴定理I o = l c+md2正交轴定理I z = X+I y.常见刚体的转动惯量:(略)3.刚体的动量和质心运动定理p mv c F ma c4.刚体对轴的角动量和转动定理L I I5.刚体的转动动能和重力势能E k ?I 2E p mgy c6•刚体的平面运动=随质心坐标系的平动+绕质心坐标系的转动动力学方程: F ma c c I c c(不必考虑惯性力矩)动能:E k 2mv;今I c c27.刚体的平衡方程、思考题解答火车在拐弯时所作的运动是不是平动答:刚体作平动时固联其上的任一一条直线,在各时刻的位置(方位)始终彼此平行。
若将火车的车厢看作一个刚体,当火车作直线运行时,车厢上各部分具有平行运动的轨迹、相同的运动速度和加速度,选取车厢上的任一点都可代替车厢整体的运动,这就是火车的平动。
但当火车拐弯时,车厢上各部分的速度和加速度都不相同,即固联在刚体上任一条直线,在各时刻的位置不能保持彼此平行,所以火车拐弯时的运动不是平动。
对静止的刚体施以外力作用,如果合外力为零,刚体会不会运动r r答:对静止的刚体施以外力作用,当合外力为了零,即Fi ma c 0时,刚体的质心将保持静止,但合外力为零并不表明所有的外力都作用于刚体的同一点。
所以,对某一确定点刚体所受合外力的力矩M Mi r i Fi不一定为零。
由刚体的转动定律M J可知,刚体将发生转动。
比如,置于光滑水平面上的匀质杆,对其两端施以大小相同、方向相反,沿水平面且垂直于杆的两个作用力时,杆所受的外力的合力为零,其质心虽然保持静止,但由于所受合外力矩不为零,将作绕质心轴的转动。
如果刚体转动的角速度很大,那么(1)作用在它上面的力是否一定很大(2)作用在它上面的力矩是否一定很大M r i F sin j J J「答:由刚体的定轴转动定律dt可知,刚体受对轴的合外力矩正比于绕定轴转动角速度的时间变化率。
第07章-周期对称结构的静力分析

第七章 周期对称结构的静力分析如果结构绕其轴旋转一个角度α,结构(包括材料常数)与旋转前完全相同,则将这种结构称为周期对称结构(循环对称结构)。
符合这一条件的最小旋转角α称为旋转周期,从结构中任意取出夹角为α的部分可以称为结构的基本扇区。
由基本扇区绕其轴旋转复制N (=απ/2,N 必为整数)份,则可得到整个完整的结构。
在ANSYS 中可以利用结构的周期对称性,在建立模型和求解时,只对一个基本扇区建模和分析,在后处理中再进行扩展,也可得到整个结构的结果。
这样可以降低一些问题的规模,节省计算费用。
本章中介绍的实例依然是第六章的轮盘,此处考虑了轮盘上的6个均压孔。
7.1 问题描述某型压气机盘如图7.1所示,其截面图如图7.2所示。
盘上6个均压孔均布。
将叶片的引起的离心效果均匀施加于轮盘的边缘。
图7.1 带有均压孔的压气机盘图7.1 压气机盘截面图中所标各点坐标如表7.1所示。
盘转速为11373转/分,盘材料TC4钛合金,其弹性模量为:1.15×105MPa,泊松比为0.30782,密度为4.48×109 吨/立方毫米。
叶片数目为74个,叶片和其安装边总共产生的离心力等效为628232N(沿径向等效),这些力假定其均匀作用于轮盘边缘。
孔数目为6个,孔半径为10mm,均布于轮盘径向200mm的圆上。
位移约束施加于鼓桶上,为在鼓桶的上表面施加径向约束,在鼓桶的侧面施加轴向约束,为避免刚体位移,两个位置的周向约束均被固定。
7.2 建立模型完整的前处理过程包括:设定分析作业名和标题;定义单元类型和实常数;定义材料属性;建立几何模型;划分有限元网格。
下面就结合本实例进行介绍,本实例中的单位为应力单位MPa,力单位为N,长度为mm。
在周期对称分析中,在建立模型后,划分网格之前,还需要指定周期对称分析类型选项。
7.2.1 设定分析作业名和标题在进行一个新的有限元分析时,通常需要修改数据库文件名(原因见第二章),并在图形输出窗口中定义一个标题用来说明当前进行的工作内容。
材料力学第六版答案第07章

习 题7-1 用积分法求图示各悬臂梁自由端的挠度和转角,梁的抗弯刚度EI 为常量。
7-1(a ) 0M()M x = ''0EJ M y ∴='0EJ M y x C =+ 201EJ M 2y x Cx D =++ 边界条件: 0x =时 0y = ;'0y = 代入上面方程可求得:C=D=0201M 2EJ y x ∴='01=M EJ y x θ= 01=M EJ B l θ 201=M 2EJ B y l(b )222()1M()222q l x qx x ql qlx -==-+- 2''21EJ 22qx y ql qlx ∴=-+-3'2211EJ 226qx y ql x qlx C =-+-+422311EJ 4624qx y ql x qlx Cx D =-+-++边界条件:0x = 时 0y = ;'0y =代入上面方程可求得:C=D=04223111()EJ 4624qx y ql x qlx ∴=-+-'2231111=(-)EJ 226y ql x qlx qx θ=+-3-1=6EJ B ql θ 4-1=8EJB y ql(c )()()()()()0303''04'050()1()()286EJ 6EJ 24EJ 120l xq x q lq l x M x q x l x l x l q y l x l q y l x Cl q y l x Cx Dl-=-⎛⎫=--=-- ⎪⎝⎭∴=-=--+=-++ 边界条件:0x = 时 0y = ;'0y = 代入上面方程可求得:4024q l C l -= 50120q l D l =()455000232230120EJ 24EJ 120EJ(10105)120EJq q l q l y l x x l l l q x l l lx x l ∴=---+-=-+- 3024EJ B q l θ=- 4030EJB q l y =-(d)'''223()EJ 1EJ 211EJ 26M x Pa Pxy Pa Pxy Pax Px C y Pax Px Cx D=-=-=-+=-++ 边界条件:0x = 时 0y = ;'0y =代入上面方程可求得:C=D=023'232321112611253262B C C B y Pax Px EJy Pax Px EJ Pa Pa Pay y a a EJ EJ EJPa EJθθθ⎛⎫∴=-⎪⎝⎭⎛⎫==-⎪⎝⎭=+=+==(e)()()()21222''1'211231113()02()2223EJ 231EJ ()2231EJ ()46a M x q qax x a q M x a x a x a a y q qaxa y qa x x C a y qa x x C x D =-+≤≤=--≤≤=-+=-++=--+++ 边界条件:0x = 时 0y = ;'0y =代入上面方程可求得:C=D=0()()()22118492024EJ 12EJ qax qax y a x a x x a ∴=--=--≤≤''2223'222242232221EJ ((2)4)21EJ (42)2312EJ (2)2312y q a ax x x y q a x ax C x y q a x ax C x D =--+=--++=---+++边界条件:x a = 时 12y y = ;12θθ=代入上面方程可求得:2296a C = 4224qa D =-()()43223421612838464162384q y x ax a x a a a x a EJ-=-+-+≤≤ 43412476B B qa y EJqa EJθ=-=-(f)()()221222''212'231122341115()20225()2225251EJ 22251EJ 26511EJ 4324qa qx M x qax x a qa qa a M x qax x a x a a y q ax x a y q x ax x C a y q x ax x C x D =-+-≤≤⎛⎫=-+--≤≤ ⎪⎝⎭⎛⎫=--+ ⎪⎝⎭⎛⎫=--++ ⎪⎝⎭⎛⎫=--+++ ⎪⎝⎭边界条件:0x = 时 0y = ;'0y =代入上面方程可求得:C 1=D 1=0''22'2222223222EJ (2)1EJ (2)21EJ ()6y q a ax y q a x ax C y q a x ax C x D =--=--+=---++ 边界条件:x a = 时 12y y = ; ''''12y y =3296a C =- 4224a D =-437124136B B qa y EJqa EJθ=-=-7-2 用积分法求图示各梁的挠曲线方程,端截面转角θA 和θB ,跨度中点的挠度和最大挠度,梁的抗弯刚度EI 为常量。
07 刚体的简单运动Hxj
角位移
Δ d lim * lim Δt 0 Δt 0 Δt dt
说明: 角速度单位是rad/s,工程单位n rpm(r/min或转/分) 换算关系为:
2n n 0.105n rad/s 60 30
3、 角加速度 设当t 时刻为 , t +△t 时刻为+△ (1) 平均角加速度
R
0.4m/s
a
M t t 1
R
t 1
d 2 R 2 dt
t 1
d 2 t 2 4t R dt 2
t 1
v
0.4m / s 2
a
M n t 1
R
2 t 1
0.2 2 0.8m / s
2
2
A
aA
全加速度大小及方向
a a 2 a 2 0.4 2 0.82 0.894m/s2 t n t 1 t 1 2 t 1 arctan 2 arctan t 1 4
§7-1 刚体的平行移动
一、概念 刚体运动时,如果在刚体内任取一直线段,在运动过程中 该直线段始终与其最初位置平行,这种运动称为平行移动 (translation),简称平移或平动。
河南理工大学力学系
理论力学
第七章 刚体的简单运动
二、刚体平行移动的性质 设刚体作平行移动,如图。在刚 体内任取两点A和B,设其矢径分别为 rA和rB,则两条矢端曲线就是两点的轨 迹。由图中几何关系可知
1、 转动方程 Ⅰ和Ⅱ夹角 ---转角(位 置角),单位为弧度(rad)
• 定轴转动方程 对着z轴正向看
t
7 2
• 的正、负规定 逆为正 顺为负
机械原理07(本科)-运转及速度波动调节

3
Y
2 1
S1 M1
S2
3
S3 F3
X
4
1 2 E1 = J1ω1 , 2 1 2 E3 = m 3v 2
1 1 2 2 E 2 = J s 2ω 2 + m 2v s2 , 2 2 1 1 2 1 2 1 2 2 则:dE = d ( J1ω1 + Js2ω2 + m2vs2 + m3v3 ) 2 2 2 2
dW = (M1ω1 − F3v3 )dt
Y
2 1
S1 M1
S2
3
S3 F3
X
4
则曲柄滑块机构的运动方程式为: 则曲柄滑块机构的运动方程式为:
1 1 2 1 2 1 2 2 d ( J1ω1 + Js2ω2 + m2vs2 + m3v3 ) 2 2 2 2 = ( M1ω1 − F3v3 )dt
对于具有n个活动构件的机械, 设第i个构件 对于具有 个活动构件的机械, 设第 个构件 个活动构件的机械 的作用力为Fi、力矩为Mi,力Fi的作用点的速度 的作用力为 力矩为 构件的角速度为ω 为vi、构件的角速度为 i, Fi与vi间的夹角为 i。 间的夹角为α 机械运动方程式的一般表达式为
机器在稳定运 转阶段, 转阶段,其等效力 矩一般是机械位置 的周期性函数
Me d
Me r
φ
Med= Med (φ) φ Mer= Mer (φ) φ
φ
则等效驱动力矩和等效阻力矩所作的功分别为: 则等效驱动力矩和等效阻力矩所作的功分别为 :
Wd (ϕ ) = ∫ Med (ϕ )dϕ
ϕa
ϕ
Me d
取转动构件为等效构件时, 取转动构件为等效构件时,有:
漆安慎《力学》教案第07章 刚体力学

Δt0 Δt dt
在定轴转动中, 只有两个转向
第七章 刚体力学
P(t+t )
+ P(t)
O
x
逆时针转动时 >0; 顺时针转动时 < 0.
角速度用每分 n 转表示时: 2πn πn rad/s
60 30
类似地可得: 角加速度
lim Δ d
d (t)dt
t
0
(t)dt
0
d (t) dt
t
0
(t)dt
0
匀速转动时 =常量
匀变速转动时 =常量
0 t 0 t
0
t
1 t2
2
2 02 2( 0)
与质点作匀速或匀变速直线运动的公式完全对应!!!
特点
(1) 刚体可以看成由许多质点组成的质点 系,每一个质点叫做刚体的一个质元
(2) 刚体内任意两点间的距离保持不变. 所以将刚体称为“不变质点系”.
研究刚体的基本方法 将刚体看作质点系,并运用已知的质
点系的运动规律去研究.
上页 下页 返回 结束
第七章 刚体力学
§7.1 刚体运动的描述
刚体最基本的运动形式有: ⑴平动;⑵绕固定轴的转动;⑶平面运动
r j
z
r k
其中
x
dx
dt
y
dy
dt
z
dz
dt
当刚体作定轴转动时,可令转轴与 z 轴重合,
则有
x y 0 x y
r
z
r k
07物理学力学习题答案

第七章基本知识小结⒈刚体的质心定义:∑⎰⎰==dm dm r r m r m r c i i c //求质心方法:对称分析法,分割法,积分法。
⒉刚体对轴的转动惯量定义:∑⎰==dm rI r m I ii 22平行轴定理 I o = I c +md 2正交轴定理 I z = I x +I y.常见刚体的转动惯量:(略) ⒊刚体的动量和质心运动定理∑==c c a m F v m p⒋刚体对轴的角动量和转动定理∑==βτωI I L⒌刚体的转动动能和重力势能c p k mgy E I E ==221ω⒍刚体的平面运动=随质心坐标系的平动+绕质心坐标系的转动动力学方程: ∑∑==c c c c I a m F βτ(不必考虑惯性力矩)动能:221221c c c k I mv E ω+=⒎刚体的平衡方程∑=0F, 对任意轴∑=0τ7.1.2 汽车发动机的转速在12s 内由1200rev/min 增加到3000rev/min.⑴假设转动是匀加速转动,求角加速度。
⑵在此时间内,发动机转了多少转?解:⑴21260/2)12003000(/7.15s rad t===-∆∆πωβ⑵rad 27.152)60/2)(12003000(21039.2622222⨯===∆⨯--πβωωθ对应的转数=42010214.3239.262≈⨯=⨯∆πθ7.1.3 某发动机飞轮在时间间隔t 内的角位移为):,:(43s t rad ct bt at θθ-+=。
求t 时刻的角速度和角加速度。
解:23212643ct bt ctbta dtd dtd -==-+==ωθβω7.1.4 半径为0.1m 的圆盘在铅直平面内转动,在圆盘平面内建立o-xy 坐标系,原点在轴上,x 和y 轴沿水平和铅直向上的方向。
边缘上一点A 当t=0时恰好在x 轴上,该点的角坐标满足θ=1.2t+t 2(θ:rad,t:s)。
⑴t=0时,⑵自t=0开始转45º时,⑶转过90º时,A 点的速度和加速度在x 和y 轴上的投影。
第07章工程力学习题答案

七 扭 转某圆轴作用有四个外力偶矩11=m m kN ⋅,6.02=m m kN ⋅,2.043==m m m kN ⋅。
(1) 试作轴扭矩图;(2) 若1m 、2m 位置互换,扭矩图有何变化?解:(2)AC ,主动轮A 传递外扭矩11=m m kN ⋅,从C 分别传递外扭矩为4.02=m m kN ⋅,6.03=m m kN ⋅,已知轴的直径4=d cm ,各轮间距50=l cm ,剪切弹性模量80=G GPa ,试求:(1) 合理布置各轮位置;(2) 求出轮在合理位置时轴的最大剪应力、轮A 与轮C之间的解:1.由扭矩图可以看出:按原先的布置,轴的最大扭矩为m kN 0.1⋅; 当主动轮A位于中间位置时,轴的最大扭矩降低为m kN 6.0⋅,因此,将主动轮A 布置在两从动轮B 和C 中间较为合理。
2.47.7MPa Pa 10416106.0633t max =⨯⨯⨯==-πτW T AC854.0r a d 0149.01043210801050106.084923p==⨯⨯⨯⨯⨯⨯⨯==--πϕGI l T AC AC 或 22tp max d GW lT GI l T d G l AC AC AC ===τϕ一空心圆轴的外径90=D mm ,内径60=d mm ,试计算该轴的t W ;若在横截面面积不变的情况下,改用实心圆轴,试比较两者的抗扭截面模量t W ,计算结果说明了什么? 解:1.空心圆轴的抗扭截面模量()()()34444444t mm 105.119016609016232⨯=⨯-=-=-=πππDd D D d D W2.实心圆轴的抗扭截面模量 设实心圆轴的直径为d ',由实心圆轴与空心圆轴的横截面面积相等,即()22244d Dd -='ππ,可得mm 1.6760902222=-=-='d D d 故实心圆轴的抗扭截面模量为 343t mm 109.516⨯='='d W π3.比较1和2可知:在横截面相同的情况下,空心圆截面要比实心圆截面的抗扭截面模量大,因而,在扭转变形中,采用空心圆截面要比实心圆截面合理。
07第7章_三相异步电动机的基本工作原理和结构[1]
![07第7章_三相异步电动机的基本工作原理和结构[1]](https://img.taocdn.com/s3/m/68c90faa80eb6294dc886c51.png)
二、转差率
定义: s n1 n 即同步转速与转子转速之差(称为转差)与同步转速之比。 n1
转差率s是异步电机的一个基本物理量,它能反映异步电机的各种运行状况。
起动瞬间:n = 0, s = 1
空载运行:n≈n1,s≈0 即空载运行时,可以近似认为转子转速等于同步转速。
额定运行: n 略低于n1 ,s = 0.01~0.06
二、单层交叉式绕组
单层交叉式绕组由线圈数和节距不相同的两种线圈组构成,同一组线圈的 形状、几何尺寸和节距均相同,各线圈组的端部互相交叉。
交叉式绕组由两大一 小线圈交叉布置。线圈端部 连线较短,有利于节省材料, 并且省铜。广泛用于q>1的 且为奇数的小型三相异步电 动机。
三、单层同心式绕组 同心式绕组由几个几何尺寸和节距不等的线圈连成同心形状的线圈组构成。
因此任意对调三相异步电动机的两根电源线,便可使电动机反转。 (2) 异步电动机的转速恒小于同步转速
n < n1时,转子与定子磁场间有相对运动,转子才会受到电磁转矩作用。 n = n1时,转子与定子磁场间无相对运动,转子不感应电流不产生转矩。 由于电动机转速n与旋转磁场转速n1不同步,故称为异步电动机。 因为电动机转子电流是通过电磁感应作用产生的,所以又称为感应电动机。
n<0, s >1,电磁转矩为制动转矩,吸收电能和机械能,全部转变成电机损耗。
异步电机主要是工作在电动机运行状态,作为各种生产机械的动力设备。
电动机的标识
三相电动机的铭牌
型号 Y160 – 4 电压 380V 转速 1460r/min 防护等级 IP144 功率因数 0.88
电机厂编号 × × × ×
2. 定子绕组
是电机的电路部分。 定子绕组为按一定规律连接而成的三 相对称绕组,嵌放在定子铁心槽内。
汽车机械基础课件 第07章 理论力学基础知识

2024/9/2
汽车机械基础
7.5 平面力系的平衡方程
• 【例7-9】外伸梁的受载情形,如图(a)所示。设q=10 kN /m, m=60 kN m,l=4m,试求梁的支座反力。
• 【解】作用在梁上的线均布荷载q,在计算支座反力时,可 用它的合力ql来代替,合力ql的作用点在线均布荷载的中部 。由于没有水平方向的外力作用,A支座的反力无水平分量
,作此外伸梁的受力图,如图(b)所示。
2024/9/2
汽车机械基础
7.5 平面力系的平衡方程
2024/9/2
汽车机械基础
7.6 空间力系
• 7.6.1 力在空间直角坐标系上的投影 • 7.6.2 力对轴之矩 • 7.6.3 合力矩定理 • 7.6.4 空间力系的平衡
2024/9/2
汽车机械基础
2024/9/2
汽车机械基础
7.1 理论力学的几个基本概念
• 7.1.1 力 • 7.1.2 刚体的概念 • 7.1.3 力系与等效力系 • 7.1.4 平衡与平衡力系
2024/9/2
汽车机械基础
7.1 理论力学的几个基本概念
• 7.1.1 力
• 1. 力的作用与效应 物体与物体之间相互的机械作用称为力。 力是改变物体运动状态或使物体产生变形的原因,力的作用
2024/9/2
汽车机械基础
7.3 力系的简化
• 7.3.1 力在坐标轴上的投影
自力矢量的始端和末端分别向某一确定坐标轴作垂线,得 到两个交点,这两个交点之间的距离,称为力在该轴上的投影 。力的投影与分力不同,投影不是矢量,而是代数量,其正负 号由其指向而定:指向与轴正向一致者为正,反之为负。
2024/9/2
第07章:01:冲量、动量、动量定律

第一讲:冲量、动量、动量定律考点一:动量、冲量、动量变化量1.(多选)恒力F 作用在质量为m 的物体上,如图所示,由于地面对物体的摩擦力较大,物体没有被拉动,则经时间t ,下列说法正确的是( ) 答案 BDA .拉力F 对物体的冲量大小为零B .拉力F 对物体的冲量大小为FtC .拉力F 对物体的冲量大小是Ft cos θD .合力对物体的冲量大小为零解析 由冲量的定义式I =F Δt 知拉力F 对物体的冲量大小为I F =Ft ,由于物体静止,所受合力为零,所以I 合=0,选项B 、D 正确。
2. (2018·全国卷Ⅰ·14)高铁列车在启动阶段的运动可看作初速度为零的匀加速直线运动.在启动阶段,列车的动能( ) 答案 BA .与它所经历的时间成正比B .与它的位移成正比C .与它的速度成正比D .与它的动量成正比解析 高铁列车做初速度为零的匀加速直线运动,则速度v =at ,动能E k =12m v 2=12ma 2t 2,与经历的时间的平方成正比,A 项错误;根据v 2=2ax ,动能E k =12m v 2=12m ·2ax =max ,与位移成正比,B 项正确;动能E k =12m v 2,与速度的平方成正比,C 项错误;动量p =m v ,动能E k =12m v 2=p 22m,与动量的平方成正比,D 项错误.3. 1998年6月8日,清华大学对富康轿车成功地进行了中国轿车史上的第一次安全性碰撞试验,成为“中华第一撞”,从此,我国汽车整体安全性碰撞试验开始与国际接轨,在碰撞过程中,下列关于安全气囊的保护作用认识正确的是( ) 答案 CA .安全气囊减小了驾驶员的动量的变化B .安全气囊减小了驾驶员受到撞击力的冲量C .安全气囊主要是减小了驾驶员的动量变化率D .安全气囊延长了撞击力的作用时间,从而使动量变化更大解析 碰撞过程中,驾驶员的初、末动量与是否使用安全气囊无关,选项A 错误;由动量定理可知,驾驶员受到的撞击力的冲量不变,选项B 错误;安全气囊延长了撞击力的作用时间,由于驾驶员的动量变化一定,动量变化率Δp Δt减小,即撞击力减小,选项C 正确,D 错误。